Microscopies de fluorescence et de diffraction super-résolues par éclairement multiple
186
0
0
Texte intégral
Figure
+7
Outline
Cas de la microscopie de fluorescence sur un échantillon 2D
Imagerie point par point : PALM et STORM
Champ lointain
Résolution du problème inverse II.2
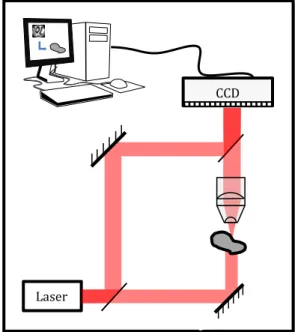
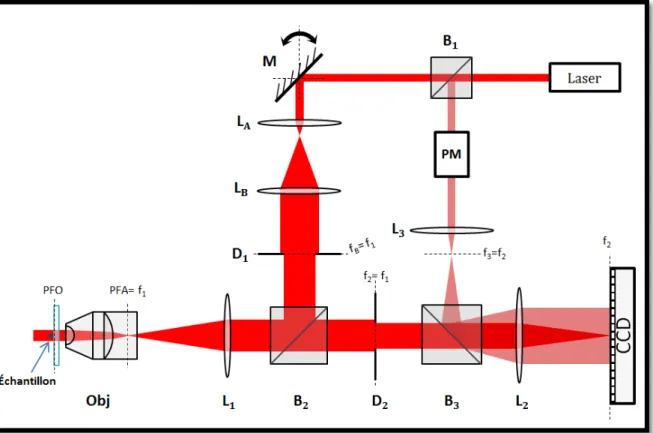
Dispositif expérimental II.3
structuré assisté par réseau Résumé du chapitre
Guide d’onde plan diélectrique
Gravure ionique réactive
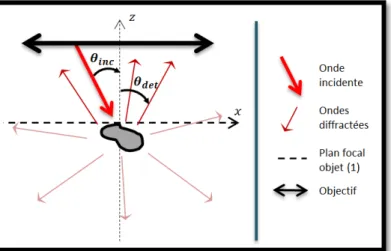
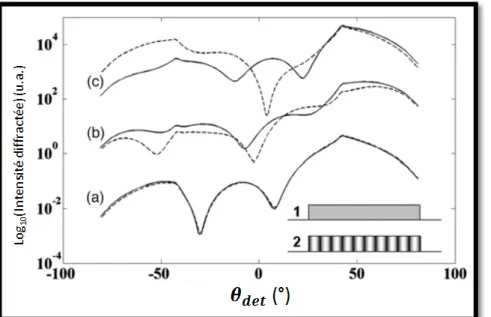
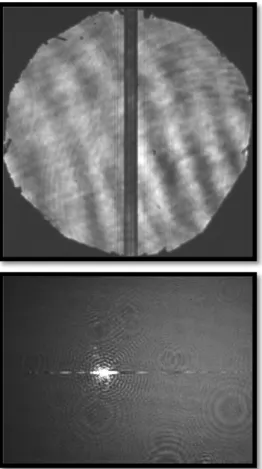
Caractérisation en champ lointain
modulateur spatial de lumière
Documents relatifs