Miniaturisation de lentilles grand angle
Thèse
Xavier Dallaire
Doctorat en physique
Philosophiæ doctor (Ph. D.)Québec, Canada
© Xavier Dallaire, 2018iii
Résumé
La miniaturisation des systèmes optiques, notamment des systèmes grand angle, est un sujet d’actualité qui revêt une grande importance. La réduction en taille des composantes optiques permet l’intégration de caméras dans une plus vaste gamme d’applications. Une amélioration constante des techniques de production ont permis jusqu’à présent de grandes avancées dans le domaine de la miniaturisation, mais aujourd’hui d’autres techniques doivent être développées dans le but de miniaturiser d’avantage.
Le but de ce projet de doctorat est d’adapter et de développer des techniques de miniaturisation applicables à des systèmes optiques grand angle. À travers l’étude des diverses techniques de miniaturisation, la lentille repliée joint à l’imagerie à fovéa et la correction d’aberration via l’imagerie plénoptique ont été retenus comme candidats permettant la miniaturisation de caméra grand angle.
Le Chapitre 3 dresse un portrait global des différentes avenues empruntées dans la littérature permettant la miniaturisation de système optique. Une courte description des techniques est présentée ainsi que les raisons pour lesquelles certaines furent écartées.
Un design original d’endoscope miniature grand angle est présenté au Chapitre 4, de même que l’ensemble du processus de conception et de tolérancement. L’utilisation d’un repli dans le système permet de réduire la taille effective du système. L’utilisation de l’imagerie à fovéa est utilisée afin de contrôler le grandissement dans les régions d’intérêts. Deux versions de l’endoscope présentant des variations différentes de leur lfl sont analysées. Il est
iv
montré qu’un contrôle actif de la distorsion au moment du design peut permettre de maintenir les performances d’un système optique dans certaines régions clés du champ de vue tout en réduisant le nombre d’éléments qui le compose.
Un algorithme de reprojection économe permettant de reconstruire une image plénoptique aberrée est présenté au Chapitre 5. Il est montré, à travers des simulations, qu’il est possible de corriger des aberrations présentes dans un système optique. Les cas monochromatiques, polychromatiques et grand angle furent abordés et corrigés avec succès. Il a aussi été démontré que l’algorithme de correction n’amplifiait pas le bruit présent dans les images d’origines. Finalement, un prototype simple de caméra plénoptique a été conçu et testé en laboratoire.
v
Abstract
The miniaturization of optical systems, particularly wide-angle systems, is a subject of great importance. The reduction in size of optical components allows the integration of cameras in a wider range of applications. Even though continuous improvements in production techniques have led to great advances in the field of miniaturization, new techniques have to be developed in order to further miniaturize.
The aim of this PhD project is to adapt and develop miniaturization techniques applicable to wide-angle optical systems. Through the study of various miniaturization techniques, the folded lens joined to foveated imaging and the correction of aberration via plenoptic imaging were retained as candidates allowing the miniaturization of wide-angle camera.
Chapitre 3 gives an overall picture of the various avenues used in the literature for the miniaturization of optical systems. A short description of the techniques is presented as well as the reasons why some were discarded.
An original miniature wide-angle endoscope design is presented in Chapitre 4, as well as the entire design and tolerancing process. The use of a fold in the system reduces the effective size of the system. Foveated imaging is used to control magnification in areas of interest. Two versions of the endoscope with different variations of their lfl are analyzed. It is shown that active control of distortion at during design can maintain the performance of an optical system in certain key regions of the field of view while reducing the number of elements that compose it.
vi
A reprojection algorithm for reconstructing an aberrated plenoptic image is presented in Chapitre 5. It is shown, through simulations, that it is possible to correct aberrations present in an optical system. Monochromatic, polychromatic and wide angle cases were successfully addressed and corrected. It was also demonstrated that the correction algorithm do not amplify the noise present in the original image. Finally, a simple prototype of a plenoptic camera was designed and tested in the laboratory.
vii
Table des matières
Résumé ... iii
Abstract ... v
Table des matières ... vii
Liste des tableaux ... ix
Table des figures ... x
Remerciements ... xiii
Chapitre 1 Introduction ... 1
Chapitre 2 Conception Optique ... 5
2.1 Concepts de base en optique... 5
2.1.1 Rayon chef, rayon marginal, pupille et nombre f ... 6
2.1.2 Champ de vue ... 9
2.1.3 Aberrations ... 11
2.1.4 Logiciels de conception optique ... 15
2.2 Imagerie à fovéa ... 17
2.2.1 Distorsion ... 19
2.2.2 Longueur focale locale ... 21
2.3 Imagerie plénoptique ... 24
Chapitre 3 Techniques de miniaturisation ... 28
3.1 Lentille repliée ... 28
3.2 Lentille à gradient d’indice ... 31
3.3 Lentille à focale variable ... 34
3.4 Fragmentation du champ de vue ... 36
3.5 Métamatériaux ... 38
viii
4.1 Design d’un endoscope grand angle utilisant l’imagerie à fovéa ... 41
4.1.1 Contraintes ... 44
4.1.2 Design ... 46
4.1.3 Analyses ... 53
4.2 Étude sur la simplification de systèmes optiques via l’imagerie à fovéa 63
Chapitre 5 Correction d’aberration via l’imagerie plénoptique
... 68
5.1 Technique de reconstruction ... 70
5.2 Résultats virtuels ... 75
5.2.1 Correction d’aberrations monochromatiques ... 75
5.2.2 Correction d’aberrations chromatique ... 77
5.2.3 Correction de systèmes grand angle ... 79
5.2.4 Bruit ... 82 5.2.5 Échantillonnage ... 84 5.3 Résultats expérimentaux ... 85
Chapitre 6 Conclusion ... 92
Annexe A ... 95
Bibliographie ... 111
ix
Liste des tableaux
Tableau 1 - Correspondance entre les coefficients de Seidel et les coefficients
de déformation du front d’onde ... 13
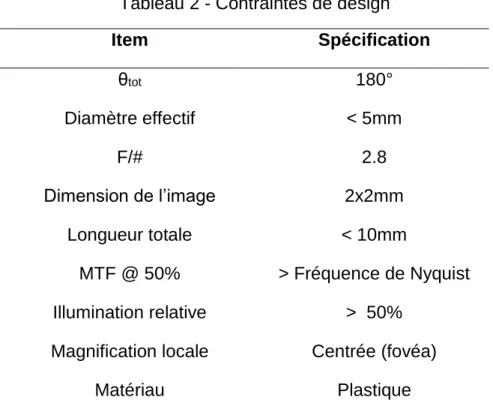
Tableau 2 - Contraintes de design ... 44
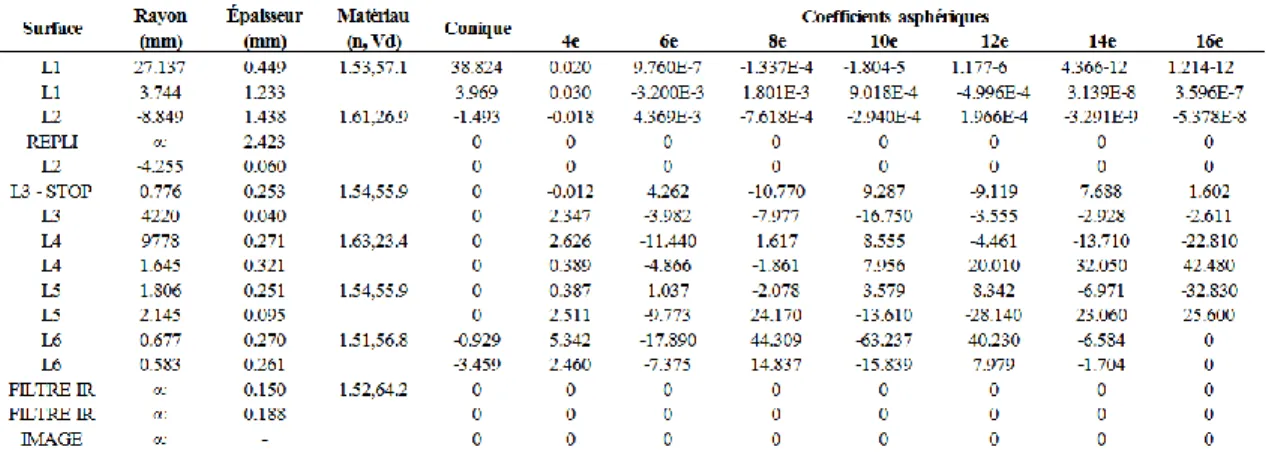
Tableau 3 – Prescription pour le Design A ... 52
Tableau 4 – Prescription pour le Design B ... 52
Tableau 5 - Résultats et comparaison ... 54
Tableau 6 - Pixels alloués pour chaque région du champ de vue ... 55
Tableau 7 - Tolérances ... 60
Tableau 8 – Prescription pour le design grand angle minimaliste ... 80
x
Table des figures
Figure 1.1 - Lentille grand angle ayant une longueur de 85mm ... 3
Figure 1.2 - Lentille grand angle miniature d’une longueur de 3.8mm ... 3
Figure 2.1 - Schéma des pupilles et des rayons principaux ... 8
Figure 2.2 - Visualisation des méthodes pour définir le champ de vue ... 10
Figure 2.3 - Défocus et courbure de champ ... 14
Figure 2.4 - Aberration sphérique et astigmatisme ... 15
Figure 2.5 - Fenêtre de travail typique dans Zemax Optic Studio ... 17
Figure 2.6 – Exemple de distorsion ... 20
Figure 2.7 - Démonstration visuelle des effets d’une longueur focale variable102 ... 22
Figure 2.8 - Longueur focale locale pour deux systèmes panoramiques ... 23
Figure 2.9 - Espacement entre les images élémentaires ... 25
Figure 2.10 - Compromis entre la résolution spatiale et angulaire dans l’imagerie plénoptique ... 26
Figure 2.11 - Visualisation de la configuration plénoptique 2.0 ... 26
Figure 3.1 - Exemple d’une lentille de type Origami utilisée comme verre de contact16 ... 29
Figure 3.2 - Champ de vue en fonction du diamètre pour différents designs de lentille Origami19 ... 30
Figure 3.3 - Aplatissement de plan focale d’une lentille à gradient d’indice de type Lüneburg33 ... 33
Figure 3.4 - Schéma d’une lentille liquide ajustable37 ... 35
Figure 3.5 - Architecture d’une lentille à cristaux liquides ... 36
Figure 3.6 - Démonstration du principe de fragmentation du champ de vue44 37 Figure 3.7 - Représentation schématique de la disposition géométrique des nanofils ... 39
Figure 4.1 - Schéma de l’endoscope grand angle replié ... 47
Figure 4.2 - Longueur focale paraxiale f1 en fonction de la distance L1-L2 .... 49
Figure 4.3 - Longueur focale paraxiale f2 en fonction de la distance L1-L2 .... 49
Figure 4.4 - Angle du rayon chef au stop en fonction du champ de vue pour différents grandissements dans le régime paraxial ... 51
Figure 4.5 - MTF du Design A et du Design B ... 54
Figure 4.6 - LFL pour les deux designs ... 55
Figure 4.7 - Taille de la tache RMS pour les deux designs ... 56
xi
Figure 4.9 - MTF des deux designs exprimée en cycles/mradians ... 58
Figure 4.10 - Simulation d’un endoscope capturant des images durant une laparoscopie102... 59
Figure 4.11 - Simulation Monte Carlo pour des designs perturbés ... 60
Figure 4.12 - Comparaison de la fréquence de la MTF à 50% et de la LFL ... 62
Figure 4.13 - Plan d’une lentille grand angle miniature ... 64
Figure 4.14 - Plan d’une lentille grand angle avec un nombre de lentille réduit ... 65
Figure 4.15 - Variation de la lfl en fonction du champ de vue ... 66
Figure 4.16 - Comparaison de la qualité d’image pour différents designs ... 67
Figure 5.1 - Exemple de correspondance entre l’objet et l’image ... 72
Figure 5.2 – Diagramme de l’algorithme de correction d’image ... 74
Figure 5.3 - Correction de l’astigmatisme ... 76
Figure 5.4 - Comparaison de la qualité d’image pour différente images aberrées reconstruites ... 77
Figure 5.5 - Correction de l’aberration chromatique dans une image plénoptique ... 78
Figure 5.6 - Images élémentaires dans des systèmes optiques grand angle . 80 Figure 5.7 – Schéma du design grand angle minimaliste ... 81
Figure 5.8 - Correction d’aberrations dans un système optique grand angle .. 82
Figure 5.9 - Comparaison de la variance du bruit avant et après la reconstruction ... 83
Figure 5.10 - Qualité d’image en fonction de l’échantillonnage ... 84
Figure 5.11 – Schéma Optique du montage expérimental ... 85
Figure 5.12 – Caméra prototype ... 86
Figure 5.13 – Reconstruction d’une cible en damier à partir de simulation ... 88
Figure 5.14 – Reconstruction d’une cible en damier à partir d’une image expérimentale ... 88
Figure 5.15 – Résolution obtenue sur l’image finale ... 89
Figure 5.16 – Reconstruction d’une scène en couleur à partir d’une image expérimentale ... 90
Figure 5.17 – MTF d’images reconstruites pour différents temps d’exposition ... 91
xii
You will burn and you will burn out you will be healed and come back again
Les frères Karamazov Fiodor Dostoïevski
xiii
Remerciements
J’arrive ici à la fin de ce doctorat. Au fil des dernières années, mon regard sur ce projet aura grandement fluctué, pour le meilleur et pour le pire. Une chose est certaine: il m’aurait été impossible de le mener à terme sans les gens m’ayant entouré et je désire les remercier.
Tout d’abord, je souhaite remercier mon directeur de recherche Simon Thibault de m’avoir conseillé et guidé, mais sans me contraindre; d’avoir su se rendre disponible tout en me laissant progresser à mon rythme et d’avoir été respectueux de mon implication dans des projets sortants du cadre de mon doctorat. Je veux aussi remercier mes autres examinateurs pour avoir pris le temps d’évaluer ce projet et le FQRNT pour leur support financier.
Je veux également remercier toute l’équipe du LRIO pour leur support et leur aide. Tout spécialement, les personnes ayant partagé le mythique 3134 avec moi au fil des ans, dont la compagnie m’a souvent donné une raison de plus (parfois la plus importante) d’aller travailler. Je tiens aussi à remercier mes compatriotes du REPOL avec qui j’ai eu la chance de réaliser de nombreux projets ainsi que le personnel du COPL pour leur aide soutenue dans ceux-ci.
Finalement, un grand merci à ma famille, mes amis et Ariane pour avoir été là tout au long du chemin.
1
Chapitre 1
Introduction
Il suffit de remonter en 2000 pour voir arriver sur le marché les premiers téléphones cellulaires avec une caméra intégrée. Neuf ans plus tard, 1 milliard de modules de caméra étaient produit dans l’année. Aujourd’hui, un téléphone sans caméra est une antiquité et la majorité des gens ont en permanence sur eux un appareil permettant la prise de photo. Cette révolution fut rendue possible grâce à deux facteurs principaux: des ordinateurs plus performants donnant un accès rapide à de l’information utile aux concepteurs optiques et le développement des techniques de fabrication.
Face à un tel engouement et grâce aux outils disponibles, la course vers de meilleurs systèmes optiques progressa très rapidement, et ce aussi dans les autres domaines connexes comme la surveillance, la vision robotique, l’instrumentation en médecine, etc. Cette course repoussa les limites et les spécifications de ces appareils à plusieurs niveaux, dont celui de leur taille. La miniaturisation des systèmes optiques fut en effet un enjeu important et continu de l’être encore aujourd’hui.
À ce jour, de nombreuses techniques de miniaturisation ont été mises de l’avant et ont fait leurs preuves sur des systèmes optiques conventionnels. Or, les systèmes optiques plus complexes, tel que les systèmes à champ de vue
2
élevé, ne sont pas toujours compatibles avec ces solutions. Ces systèmes sont pourtant utiles dans de nombreux domaines car ils permettent d’emmagasiner de l’information sur une grande portion de l’espace environnent, diminuant par le fait même le besoin de mouvement ou de captures multiples.
De nombreux efforts ont été déployés dans les dernières années pour parvenir à réduire la taille des systèmes panoramiques. La grande quantité d’information qu’une image panoramique peut emmagasiner est en effet un atout pour bien des domaines d’applications. La réduction en taille permet l’intégration de ces systèmes optiques plutôt complexes dans une plus vaste catégorie d’appareils qui jusque-là devait se contenter d’un faible champ de vue.
Cependant, les récents progrès au niveau de la miniaturisation de caméras grand angle furent rendus possibles principalement à cause de l’amélioration des techniques reliées à la production. On parle ici de réduction des épaisseurs, amélioration des tolérances et accès à de nouveaux matériaux. Or, une fois de nouvelles limites atteintes, il faut alors se pencher sur des solutions alternatives permettant de simplifier les systèmes optiques davantage et de diminuer le nombre de lentilles. Dans bien des cas, ces solutions existent, mais n’ont pas encore bien été étudiées en général, encore moins avec des systèmes grand angle.
Caméra grand angle est une appellation un peu large dont la définition peut varier dépendamment du contexte. Pour la suite de ce document, cette appellation réfèrera à des systèmes panoramiques dont le champ de vue total est égal ou supérieur à 140°. On peut retrouver ces systèmes sous la forme réfractive ou catadioptrique. Dans le cas des systèmes où les premiers éléments sont réfractifs, on retrouvera bien souvent un design s’apparentant au téléphoto inversé. Le premier groupement fortement négatif permet alors d’aller chercher un grand champ de vue. Le deuxième groupement, quant à lui, agit principalement comme objectif. Typiquement, les systèmes grands angles comportent beaucoup de lentilles et possèdent une lentille frontale ayant un diamètre très élevé par rapport au senseur, tel que présenté à la Figure 1.1.
3
Figure 1.1 - Lentille grand angle ayant une longueur de 85mm
Il est évident à première vue qu’une mise à l’échelle est impossible. De plus, pour obtenir une longueur de système réduite, il est nécessaire de réduire grandement le nombre d’élément, mais sans compromettre de façon trop importante notre qualité d’image. La lentille1 présentée ci-dessous à la Figure 1.2
constitue une bonne représentation de ce qu’il est possible d’accomplir aujourd’hui en termes de miniaturisation de caméra grand angle. On peut observer qu’il ne reste pas beaucoup d’espace d’air pouvant être réduit et les lentilles sont pour la plupart à la limite d’épaisseur pouvant être manufacturée.
Figure 1.2 - Lentille grand angle miniature d’une longueur de 3.8mm
4
Le but de ce projet de doctorat est d’adapter et de développer des techniques de miniaturisation applicables à des systèmes optiques grands angles.
À travers l’étude des diverses techniques de miniaturisation, la lentille repliée joint à l’imagerie à fovéa et la correction d’aberration via l’imagerie plénoptique ont été retenus comme candidats prometteurs permettant la miniaturisation de caméras grand angle.
Le présent document est divisé en quatre sections principales. Le Chapitre 2 se veut un survol des notions de base reliées à la conception optique permettant au lecteur de se familiariser avec les concepts à la base des idées présentées dans cette thèse. Le Chapitre 3, quant à lui, présente l’ensemble des techniques de miniaturisation explorées dans le cadre de ce projet, puis écartées. De cette façon, le lecteur pourra avoir une vision d’ensemble du problème de la miniaturisation. Les contributions originales en lien avec l’imagerie à fovéa sont présentées au Chapitre 4. Celles-ci furent publiées dans la revue Optical Engineering2 et présentées à la conférence Optical Systems Design 2015 du
SPIE3. Au Chapitre 5 sont présentées les contributions originales en lien avec la
correction d’aberrations via une matrice de microlentilles. Celles-ci furent publiées dans la revue Applied Optics4 et présentées à la conférence OSA
Imaging and Applied Optics Congress101. Finalement, le Chapitre 6 conclut cette
5
Chapitre 2
Conception Optique
Avant de se lancer dans le cœur du sujet de cette thèse, il important de faire une courte révision de certains concepts reliés à la conception optique. Le travail effectué ici s’appuie largement sur la création de systèmes optiques et leur analyse. Il est donc essentiel de s’assurer d’une certaine familiarité avec les notions utilisées lors de la création d’un système optique et de définir clairement les termes techniques qui seront employés dans les prochaines pages. Ce chapitre se veut un récapitulatif des notions de base utiles à la compréhension de ce document. Cependant, pour une description complète et détaillée de ces concepts, il est recommandé de consulter des ouvrages de références dédiés au sujet5,6.
2.1 Concepts de base en optique
Ici sont présentées les notions plus générales utiles lors de la conception optiques. Elles ne sont pas spécifiques aux sujets principaux de cette thèse, soit l’imagerie à fovéa et l’imagerie plénoptique. Celles-ci constituent la base
6
nécessaire au travail de conception optique. Certains passages sont adaptés de de travaux passés7.
2.1.1 Rayon chef, rayon marginal, pupille et nombre f
Le diaphragme d’ouverture, aussi appelé le ‘’stop’’, est probablement l’élément le plus important d’un système optique. Par soucis de simplicité, l’appellation stop sera utilisée dans le reste de ce document. Son rôle est de définir la quantité de lumière qui va être captée par le système. Il peut s’agir d’une ouverture dans le système ou alors d’un élément optique spécifique. Dans tous les cas, il s’agit de l’élément limitant le diamètre du cône de lumière (rayons) accepté par le système. À leur point de passage dans le stop, les rayons en provenance du même point ou du même champ de vue sont tous séparés l’un de l’autre. Pour cette raison, il s’agit d’un endroit de prédilection pour acquérir de l’information sur la position des rayons dans le cône de lumière qu’ils constituent. Cette notion sera abordée plus en profondeur à la Section 2.3 .
Chacune des images du stop porte le nom de pupille. Cependant, deux d’entre-elles sont principalement utilisées comme référence. La première, la pupille d’entrée, est l’image du stop dans l’espace objet. La deuxième pupille d’intérêt est la pupille de sortie. Elle constitue l’image du stop dans l’espace image. En général, les systèmes ayant comme détecteur l’œil humain cherchent à ce que la position et la taille de l’iris correspondent plus ou moins à cette ouverture. De cette façon, l’ensemble de la lumière est conservé. Par exemple, lorsque nous utilisons un microscope, pour bien voir, l’iris de l’œil doit s’aligner sur la pupille de sortie de l’oculaire.
Le diaphragme de champ joue aussi un rôle important dans un système optique. Celui-ci a pour rôle la limitation du champ de vue du système optique. Les rayons hors axes, produisant souvent des images de moins bonne qualité, peuvent alors être contrôlés et rejetés. Habituellement, le détecteur rempli ce
7 rôle de par sa dimension, mais parfois un diaphragme est mis en place dans le système. Généralement, celui-ci est positionné à un plan image intermédiaire pour limiter la taille de l’image finale. Dans le cas des lentilles grand angle, la frontale joue bien souvent ce rôle.
Si pour une raison quelconque, par exemple des lentilles de dimensions trop petites, le système bloquait certains rayons qui ont passé ou qui passeraient par le stop, ce système souffrirait de vignettage. Par conséquent, les champs de vue en question, typiquement les champs les plus loin de l’axe optique, souffriraient d’une perte de luminosité à leur arrivée au détecteur. Visuellement, cet effet se traduit par une obscuration progressive du centre vers les bords de l’image.
Avant d’expliquer ce que sont le rayon chef et le rayon marginal, il est important que lecteur comprenne l’importance du tracé de rayon en conception optique. Il s’agit ni plus ni moins du procédé par lequel la grande majorité de l’information sur un système optique est extraite. Étant donné que le système doit pouvoir performer face à un continuum de rayons, il est raisonnable de tester et analyser ses performances via le comportement de quelques rayons simulés. Dans certains cas, une grille ou des cercles concentriques de rayons plus ou moins fins seront envoyés dans notre système pour l’analyser. Dans d’autres situations, seulement deux rayons précis suffisent à obtenir l’information voulue: le rayon chef et le rayon marginal. Les rayons seront ‘’lancés’’ contre la première surface, réfractés, frapperont la deuxième et ainsi de suite jusqu’au plan image. De nos jours, des calculs par ordinateur ont intégré les équations analytiques qui étaient autrefois utilisées à la main mais la technique reste semblable.
Le rayon chef est le rayon qui traverse l’axe optique au niveau du stop. Dans le cas de lentilles faible champ, le rayon chef traversera aussi la pupille d’entrée et de sortie en croisant l’axe optique. Cependant, dans le cas de lentilles grand angle, les pupilles d’entrées pour différents champs de vue se retrouvent bien souvent hors axe. Dans ce cas, le rayon chef passera au centre de la pupille. De tous les rayons émis à partir d’un point dans l’espace objet et qui entrent dans un système sans vignettage, il est le rayon central. Certains auteurs ajoutent à la
8
définition du rayon chef qu’il doit partir de l’extrémité de l’objet ou du champ de vue le plus élevé. La définition qui sera adoptée dans cette thèse ne sera pas aussi restrictive et chaque point source de l’espace image qui traverse notre système optique possèdera un rayon chef. Les rayons chefs sont utilisés dans les définitions reliées à la distorsion et la longueur focale locale présentées dans la Section 2.2 .
Les rayons marginaux, quant à eux, sont les rayons frappant les rebords du stop et de ses images. Un système souffrant de vignettage bloquera tout d’abord ces rayons. Dans un système où l’approximation paraxiale est valide, le trajet de l’ensemble des rayons peut être déterminé à l’aide de seulement deux rayons: le rayon chef issu de l’extrémité du champ de vue et le rayon marginal issu d’un point sur l’axe optique dans l’espace objet. Un schéma de système optique présentant ces notions est visible à la Figure 2.1.
Figure 2.1 - Schéma des pupilles et des rayons principaux
Schéma présentant les éléments de base servant à décrire un système optique. Les flèches représentent ici un objet et ses images.
Le nombre f, aussi appelé f-number, permet de caractériser la quantité de lumière entrant dans un système. Pour le reste de ce document, le nombre f sera représenté comme le f/#. Celui-ci se définit comme suit :
𝑓/# = 𝑓 𝐷𝐸𝑃
9 où f est la longueur focale et DEP le diamètre de la pupille d’entrée. Plus le f/#
est petit, le rayon du cône de lumière en provenance d’un champ de vue particulier est grand. Par conséquent, la quantité de lumière entrant dans le système est proportionnelle à l’inverse du (f/#)2. Habituellement, pour un système
faible champ, on considère que le f/# est constant. Cependant, dans le cas des systèmes grand angles, la distorsion de la pupille d’entrées peut entraîner une variation de ce paramètre à travers le champ de vue. En retour, celui-ci a un effet sur d’autres facteurs tels que l’illumination relative, la résolution et la fréquence de coupure.
2.1.2 Champ de vue
Le concept de champ de vue est intrinsèquement lié au concept de système optique grand angle. En effet, étant donné que le travail présenté dans cette thèse est souvent effectué en lien avec des systèmes ayant un grand champ de vue, il est intéressant de définir ici plus en détail ce concept.
Le champ de vue est l’espace couvert par un système optique dans l’espace objet. Celui-ci peut être définit via la hauteur d’un objet placé à une distance définie ou angulairement. La première définition se prête principalement à des systèmes où les objets d’intérêts se retrouvent près de la caméra par rapport à sa distance hyperfocale. Cette distance minimale, à partir de laquelle les objets sont considérés au foyer jusqu’à l’infini, est définie tel que:
𝑑𝐻𝐹 = 𝑓𝐷𝐸𝑃
𝑐 + 𝑓 ≈ 𝑓𝐷𝐸𝑃
10
où dHF est la distance hyperfocale, f la longueur focale, DEP le diamètre de la
pupille d’entrée et c la limite du cercle de confusion acceptable. On peut voir que pour une tolérance élevée sur la taille du cercle de confusion, c’est-à-dire la taille de la tache créée sur l’image à partir d’un point source, la distance hyperfocale est réduite.
Dans le cas des systèmes optique grand angle, spécialement les systèmes miniatures, la longueur focale et l’ouverture du diaphragme sont souvent très petits. Par conséquent, les objets placés quelques centimètres ou plus loin devant la caméra seront tous au focus sur le plan image. Ils seront considérés à l’infini. Les systèmes optiques étudiés dans le Chapitre 4 et le Chapitre 5 prendront toujours pour acquis que l’objet se situe à l’infini. Pour ce genre de système, il est plus commode d’utiliser une définition du champ de vue angulaire θ. Le champ de vue θtot fera ici référence à la totalité du champ de vue sur un
axe, alors que le demi-champ de vue fera référence à l’angle maximal d’arrivée des rayons dans le système θmax, tel que présenté à la Figure 2.2.
Figure 2.2 - Visualisation des méthodes pour définir le champ de vue On peut voir à gauche que la définition du champ de vue via la hauteur d’un objet dépend directement de la distance de celui-ci avec le système optique. On définit un plan plat où chaque point est un point source. À droite, le champ de vue défini angulairement. Un pinceau de rayon arrive sur la lentille frontale avec l’angle défini par rapport à l’axe optique. Cette définition est plus versatile et prend pour acquis que l’objet est situé à l’infini.
11 Si l’on se fie à la littérature, l’appellation grand angle est extrêmement dépendante du contexte. Il est souvent implicite dans ces situations que le champ de vue est grand par rapport à ceux utilisés habituellement dans le même contexte. Dans le cadre de cette thèse, l’appellation grand angle est utilisée pour des systèmes optiques ayant au minimum 140° de champ de vue.
2.1.3 Aberrations
Nous savons, via l’optique paraxiale, l’endroit exact sur le plan image où devraient se retrouver tous les rayons issus d’un point source dans notre espace objet. Or, un système optique réel ne focalisera pas les rayons en question avec exactitude à cet endroit.
Pour représenter un front d’onde imparfait, ou encore aberré, il est possible d’exprimer celui-ci en une série de puissance autour des coordonnées du point source (x,y) et des coordonnées de l’image paraxiale (x0,y0). La symétrie de
révolution du système nous permet de redéfinir les axes pour que y0 soit toujours
égal à zéro, ce qui permet de simplifier les choses. Nous pouvons alors exprimer le front d’onde comme8 :
𝑊(𝑥2+ 𝑦2, 𝑥𝑥
0, 𝑥02) = 𝐴1(𝑥2+ 𝑦2) + 𝐴2𝑥𝑥0+ 𝐴3𝑥02
+ 𝐵1(𝑥2+ 𝑦2)2+ 𝐵
2𝑥𝑥0(𝑥2+ 𝑦2) + 𝐵3𝑥2𝑥02
+ 𝐵4𝑥02(𝑥2+ 𝑦2) + 𝐵5𝑥𝑥03+ 𝐵6𝑥04+ ⋯
Le premier terme de cette série représente une translation longitudinale, donc le long de l’axe optique, du centre de référence de la sphère et est appelé défocus. Le deuxième terme est une translation transverse et représente un tilt.
12
Le troisième représente une translation de la phase, mais n’affecte pas la qualité d’image en lumière monochromatique. Les termes d’ordre quatre, soit les coefficients B, sont reconnus dans la littérature comme les aberrations de troisième ordre car leur représentation sous forme de rayons transverses est d’ordre trois. Ils sont directement reliés aux aberrations de Seidel. On réfère à cette autre notation car elle est largement utilisée dans la littérature et les programmes de conception optique. Contrairement à une série en puissance basé sur la déformation du front d’onde, les aberrations de Seidel se basent sur l’erreur transverse du point d’arrivée des rayons. Celle-ci est directement proportionnelle à la dérivée première du front d’onde9.
Finalement, il est possible d’utiliser une représentation polaire où x= r cos θ et où r et x0 sont normalisés de zéro à un. Nous obtenons alors cette représentation
très pratique8 :
𝑊(𝑥0, 𝑟, 𝜃) = ∑ 𝑊𝑖𝑗𝑘𝑥0(2𝑖+𝑗)𝑟(2𝑘+𝑗)(𝑐𝑜𝑠𝜃)𝑗 𝑖,𝑗,𝑘
Chacun des termes est relié à une aberration et la correspondance avec les coefficients de Seidel est simple, tel que montré au Tableau 1. Il est à noter que le piston n’est pas considéré comme une aberration, mais plutôt comme une conséquence d’un mauvais positionnement de notre système optique.
13
Tableau 1 - Correspondance entre les coefficients de Seidel et les coefficients de déformation du front d’onde
Coefficients Wijk
Correspondance avec les coefficients
de Seidel Dépendance Nom de l’aberration W200 𝑥02 Piston W111 𝑥0𝑟𝑐𝑜𝑠𝜃 Tilt W020 𝑟2 Défocus W040 1 8𝑆1 𝑟4 Sphérique W131 1 2𝑆2 𝑥0𝑟3𝑐𝑜𝑠𝜃 Coma W222 1 2𝑆3 𝑥02𝑟2cos2𝜃 Astigmatisme W220 1 4(𝑆3+ 𝑆4) 𝑥02𝑟2 Courbure de champ W311 1 2𝑆5 𝑥03𝑟cosθ Distorsion
Les aberrations de Seidel seront utilisées plus loin, dans le Chapitre 5, pour caractériser la baisse en qualité d’image de notre système optique. Dans le cadre de ce travail, le défocus, l’astigmatisme, l’aberration sphérique et la courbure de champ seront principalement à l’étude. Ces aberrations sont schématiquement représentées à la Figure 2.3 et la Figure 2.4.
14
Figure 2.3 - Défocus et courbure de champ
À gauche, on peut voir un simple défocus. Celui-ci peut aisément être compensé en déplaçant le plan image. À droite, la courbure de champ. Il s’agit d’un défocus variant avec le champ de vue. Celui-ci pourrait théoriquement être compensé par une surface image courbée adaptée au système optique, ce qui ne représente malheureusement pas une solution pratique compte tenu de la technologie actuelle.
Selon l’aberration qui affectera notre système, l’amplitude de celle-ci pourra être constante, dépendante du champ de vue ou encore dépendante du point de passage dans la pupille des rayons.
En ce qui a trait à la distorsion, celle-ci constituera aussi un aspect important de cette thèse. Contrairement aux autres aberrations, la distorsion ne dégrade pas la qualité d’image, mais modifie le grandissent local de certaines régions. Ce concept sera expliqué plus en détail à la Section 2.2 .
15
Figure 2.4 - Aberration sphérique et astigmatisme
En haut, on peut voir de l’aberration sphérique positive et négative. Constante à travers le champ de vue, elle est causée par le fait que les rayons passant à différent endroit dans la pupille d’entrée ne focalisent pas au même endroit. En bas, on peut voir de l’astigmatisme. Dans ce cas, les rayons sagittaux et tangentiels ne focaliseront pas au même endroit.
2.1.4 Logiciels de conception optique
Le logiciel de conception optique est probablement l’outil le plus important à la disposition du concepteur. Celui-ci permet, via le tracé de rayons, de calculer une grande variété d’informations essentielles à la conception, l’analyse et au tolérancement de tout système optique. De plus, il incorpore des algorithmes
16
d’optimisation permettant d’assister à la création de systèmes optiques. Cependant, la recherche du meilleur design à travers l’espace des solutions est encore loin d’être parfaite pour plusieurs raisons. Tout d’abord, les fonctions d’erreurs utilisées pour minimiser les défauts d’images ne prennent presque jamais en compte la sensibilité du système aux variations. Un concepteur optique désireux d’intégrer cet aspect doit créer lui-même des sous-sections du programme. Il est aussi important de noter qu’en aucun cas il est possible de s’assurer qu’un minimum global a été obtenu et que le point de départ influencera grandement l’endroit où convergera la solution. Les choix faits en ce qui attrait aux paramètres de départ sont donc extrêmement importants. De plus, un bon concepteur optique doit pouvoir savoir quand et comment sortir d’un minimum local pour améliorer son design, et quand est-ce qu’il faut reculer d’un pas et recommencer une étape. Il s’agit donc d’un outil devant être utilisé par quelqu’un d’expérimenté et en aucun cas une optimisation aveugle ne sera à même d’égaler un design éclairé.
En plus du design optique, il est aussi possible d’utiliser le tracé de rayon dans ce type de logiciel pour générer une simulation de l’image créé par un système optique à partir d’un objet. Pour ce faire, une quantité prédéfinie de rayons par pixels sont envoyés dans une direction aléatoire à travers la pupille d’entrée du système. Ces rayons vont ensuite traverser celui-ci et aller former une image sur le senseur. Contrairement à une situation réelle où il y a prise de photo, la nature séquentielle derrière la création de ce type d’image simulée peut créer une forme de bruit dans l’image. En effet, une très grande quantité de rayons doit être tracée pour que l’image simulée soit conforme avec la réalité. Malheureusement, la puissance de calcul étant une ressource limité, une certaine quantité de bruit restera présente dans l’image, tel que discuté à la Section 5.2.4 .
Dans le cadre de cette thèse, le logiciel Zemax Optic Studio fut utilisé lors des analyses et des simulations. La Figure 2.5 présente une fenêtre de travail typique que l’on peut retrouver lors de l’utilisation de ce logiciel.
17
Figure 2.5 - Fenêtre de travail typique dans Zemax Optic Studio
On présente ici les données nominales du design, la taille de la tache RMS, la MTF et le schéma du système.
2.2 Imagerie à fovéa
Imagerie à fovéa, concept qui sera amplement utilisé dans le Chapitre 4, est un terme directement inspiré de l’œil humain. La région centrale de celui-ci, appelée fovéa, génère une image nettement plus détaillée que celles se retrouvant dans les zones extérieures du champ de vue10. Les deux principales
raisons à ce phénomène sont une augmentation de la densité de cônes et de bâtonnets dans cette région et la qualité de l’image formée par le globe oculaire au centre de l’œil. Évolutivement, les lacunes engendrées par une faible qualité d’image sur les côtés ont été compensées par la possibilité de recentrer l’œil sur les éléments d’intérêt dans l’environnement, les plaçant ainsi dans la région optimale.
18
Lorsque l’on parle d’imagerie à fovéa dans le cadre de la conception optique, on réfère à une variation volontaire de la qualité d’image à travers le champ de vue. En favorisant certaines régions d’intérêt à travers le champ de vue au détriment des autres, il est possible d’alléger les contraintes au moment du design et de simplifier, voir miniaturiser le système optique. Il existe de multiples techniques permettant d’intégrer l’imagerie à fovéa à un design optique.
La première est de s’inspirer de la rétine humaine pour créer un senseur fait sur mesure où la distribution des pixels est non uniforme de par leur densité ou encore de par leur taille. En recréant une région centrale avec de plus petits pixels faiblement séparés, il est possible d’emmagasiner une plus grande quantité d’information sur cette région du champ de vue. Une alternative intéressante est de produire le même effet avec un senseur uniforme faisant usage de groupement de pixel dynamique11. Contrairement au senseur fait sur
mesure, il est possible ici de modifier la région d’intérêt en fonction du besoin. Cependant, dans les deux cas, ces techniques se veulent des solutions à des situations où la quantité d’information que l’on cherche à manipuler est critique. En réduisant ou en groupant les pixels, la quantité de données à gérer est grandement réduite via le tri préliminaire effectué. Ces techniques seules ne mènent pas directement à une simplification du système optique ou à sa réduction en taille.
Une autre avenue possible est l’intégration d’un élément actif, comme un miroir déformable ou une lentille ajustable, qui aurait la capacité de modifier le grandissement local dans certaine portion de l’image12. Cependant, un système
intégrant un tel élément voit sa complexité augmenter significativement, surtout si l’on vise à effectuer plus qu’une simple correction de défocus.
Il est aussi possible d’utiliser l’imagerie à fovéa via le contrôle de la magnification locale sur le senseur lors du design du système optique. Le paramètre exact utilisé peut varier entre la distorsion, la longueur focale locale ou encore la quantité de pixel/degré utilisé sur le senseur. Ces paramètres seront décrits plus en détail dans cette section. Cependant, peu importe le paramètre
19 utilisé, le résultat est le même: il est possible de contrôler l’espace utilisé sur le senseur pour certaines régions du champ de vue, favorisant ainsi certaines portions du champ de vue au détriment d’autres13,14. Il est à noter que bien que
la zone d’intérêt sélectionnée soit arbitraire au moment du design, celle-ci est statique une fois le système construit.
Cette sélection de la région d’intérêt, qu’elle soit au centre, à l’extrémité ou à un point intermédiaire du champ de vue, permet en retour d’ajuster le système optique de façon à corriger adéquatement la qualité d’image de chaque section en fonction des requis une fois projetée sur le senseur. Cette planification peut en retour mener à une simplification ou à une miniaturisation du système optique. L’imagerie à fovéa peut permettre d’intéressants compromis au niveau de la qualité d’image de notre système optique. En se concentrant sur une région du champ de vue, les contraintes peuvent être relâchées, permettant, par exemple, une réduction de la taille du système. Le grandissement local à travers le champ de vue n’est donc pas un problème, mais un degré de liberté de plus.
2.2.1 Distorsion
Contrairement aux autres aberrations optiques conventionnelles, la distorsion ne dégrade pas la qualité de l’image. Celle-ci est plutôt responsable de changements en taille et en position d’un élément de l’image. Une région dans l’espace image qui correspond à un pixel bien défini dans un système parfait peut être projetée de façon différente en présence de distorsion. Comme on peut le voir à la Figure 2.6, en l’absence de distorsion, la relation entre la position angulaire de l’objet dans le champ de vue et sa distance par rapport au centre sur le plan image sera linéaire. Dans le cas où un système possède de la distorsion, cette relation change, et peu même constituer un nouveau degré de liberté que l’on peut utiliser pour favoriser certaine région du champ de vue.
20
Figure 2.6 – Exemple de distorsion
Comparaison entre une grille image sans distorsion en a) et une grille avec de la distorsion radiale négative au centre en b)12.
Dans les systèmes ayant un champ de vue réduit, on utilise habituellement les équations suivantes pour calculer la distorsion :
𝐷𝑖𝑠𝑡𝑜𝑟𝑠𝑖𝑜𝑛 (%) = 100%𝐻𝑐ℎ𝑒𝑓− 𝐻𝑟𝑒𝑓 𝐻𝑟𝑒𝑓
𝐻𝑟𝑒𝑓 = 𝑓 tan 𝜃 𝐻𝑟𝑒𝑓= 𝑓𝜃
Hchef représente ici la hauteur à laquelle le rayon frappe le plan image, Href la
hauteur de référence à laquelle le rayon chef arriverait dans un système sans distorsion, f la longueur focale et θ l’angle de provenance du rayon dans le champ de vue. On utilise l’une ou l’autre des équations dépendamment de si l’on veut une référence rectiligne ou angulaire. Une analyse rapide montre que l’équation incluant tanθ est invalide pour un système ayant un champ de vue de plus de 90°. Étant donné que les systèmes à l’étude dans ce document
21 possèdent des champs de vue élevés, il est intéressant de se doter d’une autre définition, par exemple fθ, permettant de caractériser la distorsion présente dans un système.
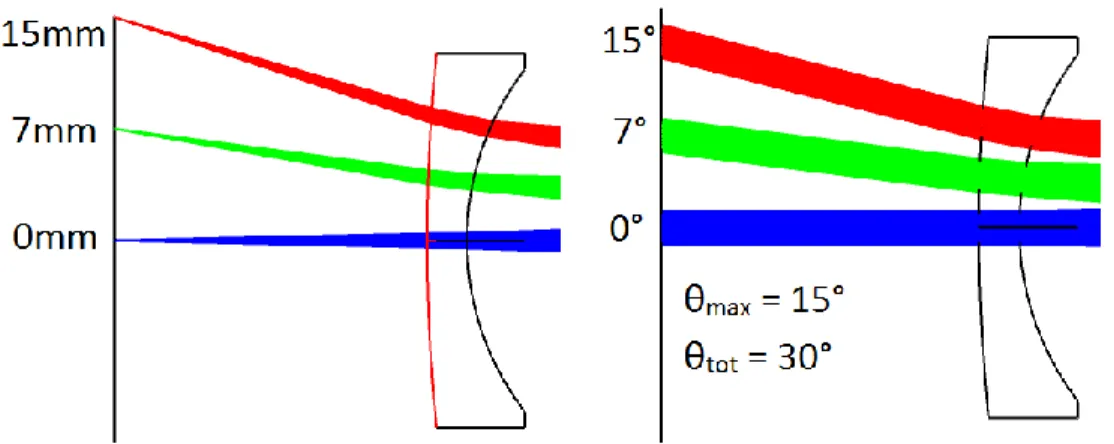
2.2.2 Longueur focale locale
La longueur focale locale, dorénavant appelé lfl dans ce document, se définit tel que :
𝑙𝑓𝑙(𝜃) =𝜕𝐻 𝜕𝜃
Il s’agit de la variation de la hauteur du rayon chef sur le senseur relativement à l’angle de provenance dans le champ de vue. Pour un système ne possédant aucune distorsion, la longueur focale locale sera exprimée par une droite selon la définition ftanθ. C’est habituellement le cas pour les systèmes optiques ayant un faible champ de vue. Dans ces cas, la lfl est constante et est simplement égale à la longueur focale du système. Dans le cas des optiques grand angle, une grande variété de courbe peut définir la lfl, surtout en présence d’éléments asphériques.
22 .
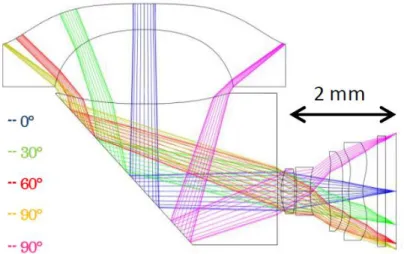
Figure 2.7 - Démonstration visuelle des effets d’une longueur focale variable102
En A) on peut observer l’image panoramique redressée ayant servi de base à cette simulation. Le champ de vue total est de 180° dans les deux axes principaux de l’image. En B), une simulation d’une image panoramique telle que captée par le senseur pour un système ayant une longueur focale constante à travers le champ de vue. En C), une simulation du système présenté à la Figure 4.1. On peut clairement voir ici l’emphase sur le centre de l’image au détriment de l’information présente sur les côtés.
Le contrôle de cette distorsion, et par le fait même de la lfl, est crucial dans le développement de caméra grand angle car il permet de sélectionner les régions d’intérêts dans le champ de vue au cours du design. Si l’on désire couvrir uniformément notre champ de vue, une longueur focale locale constante à
23 travers le champ sera favorisée. Cependant, dans certains cas on recherche à augmenter le grandissement d’une région en particulier. Nous obtenons alors un système d’imagerie à fovéa. Typiquement, ces systèmes sont caractérisés par un maximum de longueur focale locale à cet endroit, tel que présenté à la Figure 2.8. L’œil humain est un exemple naturel de système grand angle (≈200°) avec une emphase mise sur le centre du champ de vue. Une variation de longueur focale à travers le champ de vue aura un impact sur différents autres paramètres caractéristiques du système comme l’illumination relative et la fréquence de coupure.
Figure 2.8 - Longueur focale locale pour deux systèmes panoramiques À gauche on peut voir le comportement d’une lentille de type fisheye avec un grandissent de plus en plus faible tout au long du champ de vue. L’emphase est donc placée sur le centre de l’image. À droite on voit la courbe pour une lentille panomorphe. On peut observer un fort grandissement autours de la région à 60°. Cette lentille accorde donc plus d’importance sur le senseur aux objets en périphéries qu’à ceux au centre de l’image12.
24
2.3 Imagerie plénoptique
L’imagerie plénoptique, aussi appelée light field photography ou imagerie intégrale, consiste à emmagasiner de l’information sur l’angle d’arrivée des rayons, en plus de leur position, de leur intensité et de leur longueur d’onde. Dans un système optique monochromatique conventionnel, les rayons sont captés par un pixel situé sur le senseur, et une image est créée. Il s’agit d’une fonction d’intensité en 2D dépendante de la position x,y. Pour un système non-aberré, la limite sur la résolution finale va simplement dépendre de la taille des pixels et de la taille de la tâche d’Airy. Dans le cas d’un senseur polychromatique, de l’information supplémentaire est acquise sur la longueur d’onde. Le cas le plus fréquent est l’utilisation d’un patron de Bayer, soit une utilisation de filtres placés selon une certaines disposition devant les pixels permettant de discriminer la réponse dépendamment de la longueur d’onde. Cependant, l’acquisition de cette information se fait à un certain coût au niveau de la résolution spatiale. Dans le cas de l’imagerie plénoptique, l’acquisition de l’information angulaire supplémentaire vient aussi à un certain coût au niveau de résolution spatiale.
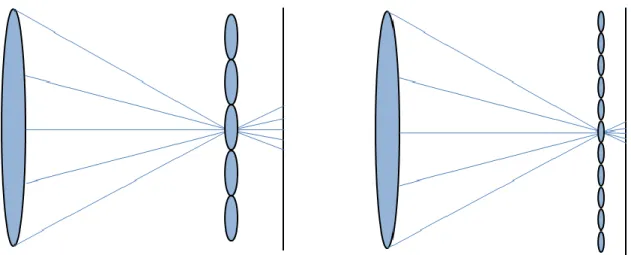
La technique habituellement utilisée est le placement d’une matrice de microlentilles près du plan image du système optique. En sélectionnant une taille et longueur focale adéquate pour les microlentilles, il est possible de former une image, appelée image élémentaire, derrière chaque microlentille. En effet, en faisant correspondre les f/# des microlentilles et du système optique et en plaçant le plan image une distance focale derrière la microlentille, il est possible de maximiser la taille de chaque image élémentaire, sans pour autant qu’il n’y ait de recouvrement, tel que montré à la Figure 2.9.
25
Figure 2.9 - Espacement entre les images élémentaires
À gauche, on peut voir que la taille des images élémentaires cause une sous-utilisation du senseur, réduisant par le fait même l’information disponible. Le f/# des microlentilles est trop élevé par rapport à celui du système. Au centre, une utilisation efficace de l’espace sur le détecteur. À droite, le cas inverse où les images élémentaires se mélangent, créant aussi une perte d’information.
L’objectif est d’échantillonner à la fois la position et l’angle. Étant donné que les microlentilles se retrouvent au focus du système, ceux-ci vont échantillonner la position, comme dans un système optique conventionnel. La position de l’image élémentaire où se retrouveront les rayons issus d’un même champ de vue contiendra l’information spatiale x,y. Plus la taille de la microlentille sera petite, plus l’information sur la position sera précise. En ce qui a trait à l’information angulaire, l’objectif sera d’échantillonner la pupille. Malheureusement, il n’est pas réaliste de venir acquérir cette information au niveau du stop. Celle-ci sera cependant disponible à l’intérieur même d’une image élémentaire. En effet, après avoir passé la matrice de microlentilles, les rayons vont se séparer angulairement selon leur point de passage dans la pupille d’entrée du système. Leur position finale à l’intérieur d’une image élémentaire contiendra donc de l’information sur leur provenance angulaire. Dans ce cas-ci, plus la microlentille sera grande, plus l’information angulaire sera précise. Ces notions sont présentées à la Figure 2.10.
Deux configurations principales sont possibles. Tout d’abord, il est possible de placer les microlentilles au plan image, tel que montré dans la Figure 2.10. Il s’agit de la première configuration plénoptique qui fut proposée. Il est aussi possible de placer le détecteur au plan image, tel que montré dans la Figure
26
2.11. Cette configuration alternative est aussi appelée plénoptique 2.0. C’est cette configuration qui sera utilisé au Chapitre 5.
Figure 2.10 - Compromis entre la résolution spatiale et angulaire dans l’imagerie plénoptique
On peut voir à gauche que pour une taille élevée de microlentille, le nombre de pixels alloués sur le senseur à l’acquisition de l’information angulaire augmente. À droite, on peut voir qu’une réduction en taille des microlentilles diminue l’information angulaire, mais augmente la précision sur spatiale via la présence d’une plus grand quantité de microlentille.
Figure 2.11 - Visualisation de la configuration plénoptique 2.0
On peut voir ici deux versions de la configuration plénoptique 2.0 ou l’image est au focus sur le détecteur.
27 L’information angulaire ainsi acquise peut être utilisée de plusieurs façons dans le traitement à postériori. De façon générale, ce traitement sera basé sur une méthode de projection. L’image finale sera reconstruite de façon à ce que chaque pixel final soit la somme de l’information répartie entre différents pixels sur l’image plénoptique. Les techniques de projection sont habituellement considérées coûteuses au niveau de la puissance computationnelle requise.
Parmi les multiples utilisations possible de cette technologie, la correction du défocus s’est avérée être particulièrement intéressante et ce à cause d’un artifice mathématique réduisant énormément la puissance de calcul nécessaire à effectuer la projection. En effet, à travers le théorème de tranche de Fourier, il est possible de montrer que la projection est équivalente à prendre une tranche de notre image dans l’espace de Fourier. Cependant, il est nécessaire, pour utiliser cette technique, d’avoir un système bien corrigé ne souffrant que de défocus. Pour un système aberré, un point dans l’image n’est pas exprimé par une tranche droite dans l’espace de Fourier, mais bien par un plan courbé, rendant impossible cette simplification. Étant donné que les cas traité au Chapitre 5 contiennent des aberrations, il est nécessaire de revenir à des techniques de projection plus standard. La technique de projection utilisée dans ce document sera présentée à la Section 5.1 .
Ces techniques de projection permettent entre autre de reconstruire des volumes 3D, de mesurer des distances et de corriger des aberrations présentes dans des systèmes optiques.
28
Chapitre 3
Techniques de miniaturisation
Il existe une grande quantité de techniques pouvant potentiellement aider à la miniaturisation de caméra panoramique. Il serait irréaliste de les explorer toutes dans le cadre d’un seul doctorat. Néanmoins, un survol général des techniques existantes a été effectué dans le but de sélectionner celles étant les plus prometteuses. Ce chapitre est dédiée à la présentation des techniques ayant été étudiée, mais finalement exclues du cœur de ce doctorat.
3.1 Lentille repliée
Un nouveau type de système optique fut proposé dans les dernières années: la lentille Origami15. Il s’agit en fait d’une extrapolation du télescope de type
Cassegrain où le nombre de surface réfléchissante est plus élevé. Les différents designs actuels impliquent 4, 6 et 8 surfaces réfléchissantes. La lumière entre dans le système via un anneau situé en périphérie de la lentille et est par la suite déviée vers le centre où se trouve le détecteur, tel que présenté à la Figure 3.116.
29
Figure 3.1 - Exemple d’une lentille de type Origami utilisée comme verre de contact16
L’avantage principal de ce type de design est sa faible épaisseur de 1.17mm. De plus, il est possible, via un contrôle de la polarisation, de choisir dans quel canal va passer la lumière : directement au centre ou par l’anneau extérieur. De cette façon, il est possible d’aller chercher un pouvoir de magnification de 2.8x17
sans qu’il y ait de mouvement ou de variation de courbure des surfaces. Un contrôle des effets chromatiques est réalisé via l’utilisation d’éléments diffractifs. Il est aussi possible de compenser une qualité d’image insuffisante en traitant les images à postériori via des techniques de correction de front d’onde18.
Quoique très prometteur, plusieurs défauts viennent contrebalancer les aspects positifs de ce système optique. Tout d’abord, la multitude de réflexions réduit d’autant plus l’angle d’acceptante des rayons et donc, le champ de vue, tel que présenté à la Figure 3.219. Or, la qualité finale de l’image est directement
reliée à ce même nombre de réflexion. De plus, l’habileté de la lentille à collecter de la lumière est de par sa nature plutôt réduite. Pour compenser cela, il est nécessaire d’aller chercher un diamètre assez grand, ce qui peut être nuisible si on garde en tête l’avenue de la miniaturisation. Finalement, l’utilisation d’un
30
élément diffractif, de lumière polarisée et les multiples réflexions contribuent à réduire grandement la fraction la lumière pouvant se rendre au détecteur.
Figure 3.2 - Champ de vue en fonction du diamètre pour différents designs de lentille Origami19
Tout en restant dans la famille des lentilles repliées, il peut être intéressant d’explorer des designs plus simples que la lentille Origami. Il existe en effet certains cas où une simple réflexion peut comporter plusieurs avantages20. Par
exemple, une réflexion à 90° dans un système optique permet de changer l’axe optique de celui-ci. La lentille frontale peut donc pointer dans une direction alors que la majorité des éléments optiques se trouve dans un autre axe. Cette propriété peut être très utile en endoscopie ou en inspection car la région d’intérêt est fréquemment sur les côtés. De plus, il est possible de répartir la longueur du système sur deux axes et ainsi garder le système compact, tout en gardant une longueur effective assez longue. Cet aspect sera exploité lors du design de l’endoscope présenté au Chapitre 4.
Finalement, les systèmes hors axes avec des miroirs asphériques furent aussi considérés comme candidat potentiel. Cependant, lorsqu’il vient le temps de
31 considérer leur adaptation à des applications miniatures, on rencontre rapidement le même genre de limitation que pour la lentille Origami. Les champs de vue et les tailles que l’on retrouve dans la littérature21,22 sont insatisfaisants et
leur complexité élevée.
3.2 Lentille à gradient d’indice
L’étude des lentilles à gradient d’indice date de plus de 150 ans. Il faut cependant attendre les années 1970 avant que les premiers prototypes fonctionnels voient le jour23. Les techniques de production se sont raffinées
depuis, mais la plage dynamique accessible au niveau de la variation de l’indice de réfraction est toujours restée assez faible en ce qui attrait au spectre visible (Δn≈0.12). Dans certains cas particulier, il est possible de monter à une plage dynamique de 0.2224. Face à cette contrainte, l’utilisation des métamatériaux
s’est présentée comme une alternative prometteuse.
Certains concepts clés derrière l’utilisation des métamatériaux sont connus depuis aussi longtemps que 194825. Or, un regain d’intérêt pour le sujet apparait
lorsque l’on prouve pour la première fois expérimentalement l’existence d’indice de réfraction négatif26,27. Autour des années 2005, plusieurs articles sont publiés
sur l’utilisation de lentille à gradient indice utilisant des métamatériaux, principalement au niveau des micro-ondes28–30.
Malgré le fait qu’il est impossible à l’heure actuelle de créer des lentilles ayant les variations d’indices nécessaires pour le spectre visible, la comparaison rigoureuse effectué par Nguyen31 entre une lentille réfractive et une lentille à
gradient d’indice de type Wood permet de voir dans quelle mesure celle-ci peut rivaliser avec la lentille réfractive. L’analyse fut effectuée dans un cadre purement théorique et suggère, de par les valeurs des paramètres physiques utilisés, l’utilisation des métamatériaux. Le type de lentille choisi pour la
32
comparaison est défini par une variation d’indice de réfraction radiale de la forme suivante :
𝑛2(𝑟) = 𝑛
02(1 − 𝑘𝑟2+ 𝑁4𝑘2𝑟4) + 𝑛6𝑟6
où l’indice est constant le long de l’axe optique. L’auteur tire avantage de la correspondance entre les coefficients d’indice de réfraction et les coefficients asphériques pour créer deux lentilles ayant une quantité de degrés de liberté similaire. De façon un peu décevante, les résultats présentés sur la qualité respective des lentilles sont extrêmement similaires. Les avantages possibles sont donc très circonstanciels. Les résultats semblent plus encourageant du côté des lentilles à gradient d’indice de type Lüneburg.
La lentille de Lüneburg est une lentille à gradient d’indice de forme sphérique où l’indice de réfraction varie par rapport à son centre. Plusieurs articles ont paru dans les dernières années et mettent en lumière différentes solutions possibles permettant d’utiliser cette lentille atypique en imagerie. On présente même des alternatives pratiques aux problèmes inhérents à la solution de base de ce type de lentille. On parle ici d’une variation d’indice réaliste, d’un indice de réfraction discret au lieu de continu et de solutions permettant d’avoir un indice de réfraction différent de un à la surface de la sphère32. Dans son application en tant
que concentrateur solaire, ce genre de lentille aurait des facteurs de concentration jusque-là inégalés pour des systèmes à une seule lentille. Au niveau de l’imagerie, sa symétrie sphérique permet un champ de vue extrêmement grand, mais implique un détecteur qui épouse la forme arrondie de la lentille. Des tentatives fructueuses pour aplatir le plan focal via des transformations optiques quasi-confocales ont vu le jour, tel que présenté à la Figure 3.333. L’auteur propose un design en deux dimensions, avec deux régions
discrètes à gradient d’indice (1 à 2 et 2 à 4) fonctionnant autour de 20mm à 43mm et utilisant des métamatériaux.
33
Figure 3.3 - Aplatissement de plan focale d’une lentille à gradient d’indice de type Lüneburg33
L’espace mathématique des solutions possibles continu de grandir34, mais les
réalisations concrètes dans le visible se laissent attendre.
Il est à noter que certaines techniques de design d’achromates ont aussi vu le jour récemment. En effet, la possibilité de manufacturer des feuilles de polymère avec un indice de réfraction présélectionné ouvre la porte à un nouveau type de lentille : les achromates simples à gradient d’indice. Malgré certaines difficultés reliées à l’algorithme d’optimisation, le gain est notable. Les simulations présentées sont concrètement réalisable, mais l’article ne fait pas mention d’un prototype35,36.
34
3.3 Lentille à focale variable
L’idée de pouvoir modifier la courbure d’une lentille en temps réel est extrêmement attrayante. Les applications immédiates sont évidentes : autofocus ou encore, système de zoom sans pièces mobiles. Le perfectionnement de ces systèmes est très prisé dans l’industrie des caméras d’appareils mobiles, ce qui a grandement contribué au développement de ce type d’optique. Les lentilles à focus variable se divisent principalement en deux catégories : les lentilles liquides et les lentilles à cristaux liquides.
Les lentilles liquides sont composées de deux liquides immiscibles dont l’un d’entre eux est un conducteur. Les côtés de la cellule sont composés d’une substance repoussant l’un des liquides, permettant ainsi de former une interface courbe faisant office de lentille, tel que présenté à la Figure 3.437. En faisant
varier le courant au niveau de cette surface, on peut altérer la force avec laquelle le liquide est repoussé, et ainsi modifier activement la forme de notre lentille. De plus, une grande liberté au niveau du choix des liquides permet d’ajuster certains paramètres de façon favorable. On peut tout d’abord s’assurer que le liquide ne soit pas affecté outre mesure par les variations de température. On peut aussi créer l’équivalent d’un doublet achromatique et ainsi améliorer encore plus les performances de notre lentille. Certains modèles ont un très grand pouvoir d’ajustement allant de -100D à +50D, et donnent des résultats très prometteurs.
Malheureusement, cette lentille est basée tout d’abord sur le déplacement physique de liquides, ce qui peut s’avérer trop sensible aux effets de l’environnent tel que l’accélération. De plus, ce type de module est assez complexe et dispendieux à produire38.
35
Figure 3.4 - Schéma d’une lentille liquide ajustable37
En a), la lentille au repos avec le liquide bleu repoussé par les parois. En b), la lentille avec un courant diminuant la force de répulsion des parois envers le liquide bleu.
Le deuxième type de lentille souvent utilisé dans ce cas est la lentille à cristaux liquides39. Ce type de lentille utilise la propriété des cristaux à s’aligner
dans un champ électrique pour dévier la lumière passant au travers, obtenant ainsi l’équivalent d’une lentille. Contrairement à la lentille liquide, ce type de lentille ne peut affecter qu’un axe de polarisation à la fois. Il est donc nécessaire d’avoir deux lentilles dont l’alignement en polarisation est croisé pour pouvoir efficacement focaliser la lumière ambiante.
Pour que la déviation de la lumière soit de la même forme qu’avec une lentille, une certaine forme de gradient doit être induite dans la couche de cristaux liquides. Plusieurs méthodes plus ou moins complexes existent actuellement. Il est possible de créer une couche non-uniforme de cristaux liquides ou d’appliquer un champ électrique non-uniforme à une couche uniforme. Dans le but de pouvoir créer facilement ce genre de module, l’architecture de ces lentilles semble tendre vers l’utilisation de couches de cristaux uniforme avec une couche de substrat intermédiaire transformant le champ électrique uniforme en champ électrique non-uniforme, tel que présenté à la Figure 3.5.