THÈSE
Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS UFR des sciences fondamentales et appliquées
Pôle poitevin de recherche pour l'ingénieur en mécanique, matériaux et énergétique - PPRIMME (Poitiers)
(Diplôme National - Arrêté du 25 mai 2016)
École doctorale : Sciences et ingénierie en matériaux, mécanique, énergétique et aéronautique -SIMMEA (Poitiers)
Secteur de recherche : Milieux denses, matériaux et composants
Présentée par : Wilgens Sylvain
Étude de la plasticité du monocristal de phase MAX par déformation aux petites échelles
Directeur(s) de Thèse :
Ludovic Thilly, Christophe Tromas, Anne Joulain Soutenue le 06 décembre 2016 devant le jury
Jury :
Président Helena Van Swygenhoven Professeur, Institut Paul Scherrer, Suisse
Rapporteur Marc Legros Directeur de recherche CNRS, Toulouse
Rapporteur Guy Dirras Professeur des Universités, Université de Paris 13 Membre Ludovic Thilly Professeur des Universités, Université de Poitiers Membre Christophe Tromas Professeur des Universités, Université de Poitiers
Membre Anne Joulain Professeur des Universités, Université de Poitiers
Membre Jean-Sébastien Micha Ingénieur de recherche CNRS, ESRF de Grenoble
Pour citer cette thèse :
Wilgens Sylvain. Étude de la plasticité du monocristal de phase MAX par déformation aux petites échelles [En ligne]. Thèse Milieux denses, matériaux et composants. Poitiers : Université de Poitiers, 2016. Disponible sur Internet <http://theses.univ-poitiers.fr>
THÈSE
pour l’obtention du Grade de
DOCTEUR DE L’UNIVERSITÉ DE POITIERS (Faculté des Sciences Fondamentales et Appliquées)
(Diplôme National - Arrêté du 7 août 2006)
Ecole Doctorale : Sciences et Ingénierie
en Matériaux, Mécanique, Énergétique et Aéronautique
Secteur de Recherche : Milieux denses, Matériaux et Composants
Présentée par :
Wilgens SYLVAIN
************************
Étude de la plasticité du monocristal de la phase MAX Ti
2AlN
par déformation aux petites échelles
************************
Directeurs de thèse : L. THILLY, C. TROMAS et A. JOULAIN
************************
Soutenue le 06 Décembre 2016 devant la commission d’examen ************************
JURY
Marc LEGROS Directeur de recherche CNRS, CEMES Toulouse Rapporteur Guy DIRRAS Professeur, Université Paris 13, LSPM Rapporteur Helena VAN SWYGENHOVEN Professeure, EPFL-Institut Paul Scherrer, Suisse Examinatrice Jean-Sébastien MICHA Ingénieur de recherche CNRS, ESRF Examinateur Ludovic THILLY Professeur, Université de Poitiers Examinateur Anne JOULAIN Professeure, Université de Poitiers Examinatrice Christophe TROMAS Professeur, Université de Poitiers Examinateur
CONTENU
Page i
Introduction et contexte ... 1
Chapitre I ... 3
ÉTAT DE L’ART ... 3
1.- Historique et généralités sur les phases MAX ... 4
1.1.- Structure cristallographique des phases MAX ... 5
1.2.- Synthèse des Phases MAX ... 6
2.- Plasticité des phases MAX ... 7
2.1.- Systèmes de glissement dans les matériaux à maille hexagonale ... 7
2.2.- Arrangement des dislocations dans les phases MAX ... 8
2.3.- Réponses mécaniques à température ambiante lors des essais monotones ... 12
2.3.1.- Allures des courbes mécaniques en compression ... 12
2.3.2.- Kink bands, délaminations et mécanismes de formation ... 13
2.3.3.- Formation des kink bands selon le modèle de Hess et Barret ... 14
2.4.- Réponses mécaniques à haute température lors des essais monotones ... 15
3.- Comportement hystérétique lors des essais mécaniques cyclés ... 17
3.1- Terminologies ... 17
3.2- Hystérèse à travers les courbes mécaniques ... 18
4.- Les approches et modèles d’explication du comportement hystérétique ... 20
4.1. – Explications par mouvement des macles ou changement de phase ... 20
4.2. - Les Incipients Kink Bands (IKBs) ... 22
4.2.1.- Le modèle de Frank et Stroh : équilibre de deux murs de dislocations sous contrainte ... 22
4.2.2.- Le modèle de Barsoum : le concept d’IKB et la classe des solides KNE ... 23
4.3.- Modèle de Poon : Frottement entre faces de microfissures (FFM) (Ti2AlC) ... 30
4.4.- Explications de Jones : glissement réversible des dislocations (GRD) ou anisotropie et insuffisance de systèmes de glissement ... 32
4.5.- Explications de Guitton : déformation d’une structure complexe et anisotrope (DSCA) ... 34
4.6.- Modèle de Benitez ... 36
4.7.- Qu’en est-il du monocristal de phase MAX ? ... 39
Bilan du chapitre I ... 40
Chapitre II ... 42
MATÉRIELS ET MÉTHODES ... 42
1.- Synthèse et préparation des échantillons de la phase MAX Ti2AlN ... 43
2.- Techniques expérimentales avant essais mécaniques : EBSD, FIB ... 45
CONTENU
Page ii
3.1.- Nano-indentation ... 48
3.1.1.- Introduction ... 48
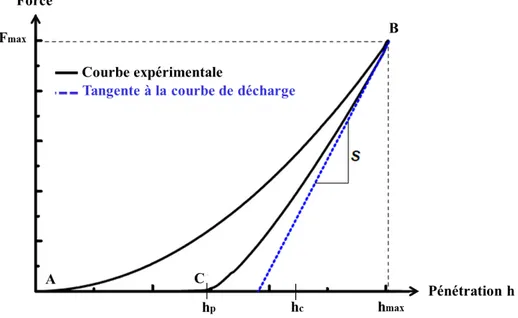
3.1.2.- Description de l’essai de nano-indentation ... 48
3.1.3.- Mesure de la dureté et du module d’élasticité par nano-indentation ... 49
3.2.- Le nanoindenteur U-NHT « Ultra Nano Hardness Tester, ANTON PAAR » ... 50
3.2.1.- Description de l’appareil ... 50
3.2.2.- Utilisation en indentation avec une pointe sphérique ... 51
3.2.3.- Utilisation en micro-compression avec un poinçon plat ... 53
3.2.3.1.- La micro-compression ... 53
3.2.3.2.- Déroulement d’un essai de micro-compression... 54
3.3.- Le nanoindenteur « NanoTest Platform 3 from Micro Materials» (IMM, Aachen, Allemagne) ... 57
3.4.- Appareillage de micro-compression in-situ (SLS, PSI, Suisse) ... 59
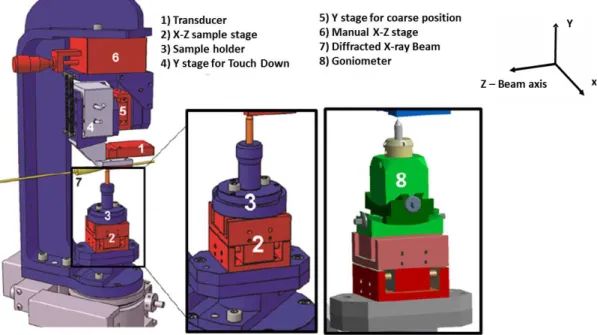
3.4.1- Description de l’appareillage ... 59
3.4.2.- Alignement pointe – échantillon et rapprochement pointe-pilier ... 62
3.4.3.- Caractéristiques de la ligne de faisceau ... 63
3.4.4.- Démarches à effectuer avant un essai de micro-compression in-situ ... 64
4.- Techniques expérimentales d’observations des microstructures de déformation : AFM, MEB, MET ... 66
4.1.- Microscopie à Force Atomique (AFM) ... 66
4.2.- Microscopie Électronique à Balayage (MEB) ... 68
4.3.- Microscopie Électronique en Transmission (MET) ... 68
Chapitre III ... 69
COMPORTEMENT HYSTÉRÉTIQUE DE LA PHASE Ti2AlN : ÉTUDE PAR NANOINDENTATION SPHÉRIQUE ET COMPRESSION DE MICRO-PILIERS ... 69
1.-Introduction ... 70
2.- Les essais de nano-indentation avec une pointe sphérique ... 70
2.1.- Introduction- méthodologie ... 71
2.2.- Courbes mécaniques et empreintes résiduelles obtenues : étude de quatre configurations différentes73 2.2.1.- Cas simple d’un comportement élastique : validation des hypothèses d’élasticité ... 73
2.2.2.- Cas complexes et manifestation du comportement hystérétique ... 74
2.3.- Calcul de la force de glissement agissant sur les dislocations basales de la structure hexagonale ... 81
2.3.1.- Introduction ... 81
2.3.2.- Détermination de l’orientation du plan de base par rapport à la surface indentée ... 81
2.3.3.- Passage des angles d’Euler aux indices de la maille hexagonale ... 83
CONTENU
Page iii
2.4.- Cartographie de la force de glissement ... 87
2.4.1.- Introduction ... 88
2.4.2.- Cas d’une empreinte où le plan de base est presque normal à la surface du grain ... 88
2.4.3.- Cas d’une empreinte où le plan de base fait un angle proche de 45° par rapport à la surface du grain ... 90
2.4.4.- Cas d’une empreinte où le plan de base est à moins de 30° de la surface du grain ... 91
2.4.5.- Résumé des résultats des essais de nanoindentation ... 93
3.- Les essais de compression des micro-piliers avec un poinçon plat ... 94
3.1.- Préparation de l’échantillon pour l’usinage des micropiliers ... 94
3.2.- Résultats de la micro-compression ex-situ ... 97
3.2.1.- Exemple détaillé du protocole : cas du pilier P6_Z1 ... 97
3.2.1.1.- Chargement simple : courbe mécanique ... 98
3.2.1.2.- Chargement multicyclé : courbes mécaniques ... 99
3.2.1.3.- Chargement multicyclé avec décharge partielle : courbes mécaniques ... 101
3.2.1.4.- Chargement simple et « forte » déformation : courbes mécaniques ... 102
3.2.2.- Généralisation et effet de l’orientation des piliers : cas des piliers P3_Z2 et P10_Z2 ... 103
3.2.3.- Analyse de lignes de glissement aux « fortes » déformations : cas des piliers P3_Z1, P2_Z2 et P9_Z2 ... 105
3.2.3.1.- Introduction ... 105
3.2.3.2.- Cas du pilier P3_Z1 ... 105
3.2.3.3.- Cas du pilier P2_Z2 ... 109
3.2.3.4.- Cas du pilier P9_Z2 ... 113
3.2.3.5.-Bilan sur l'observation des lignes de glissement sur les piliers ... 114
4.- Discussion sur l’origine de l’hystérèse des courbes mécaniques obtenues en nanoindentation et microcompression ex-situ ... 114
4.1.- Confrontation avec le modèle des « Incipients Kink Bands » ... 114
4.2.- Qu’en est-il de l’origine du comportement hystérétique ? ... 115
Bilan du chapitre III ... 117
Chapitre IV ... 119
COMPRESSION IN-SITU DE MICRO-PILIERS DE Ti2AlN COUPLÉE À LA MICRO-DIFFRACTION DE LAUE ... 119
1.- Introduction ... 120
2.- Micro-diffraction de Laue et taches de diffraction ... 120
2.1.- Micro-diffraction de Laue ... 120
CONTENU
Page iv
3.- Programme d’indexation des taches de diffraction Laue au PSI. ... 124
3.1- Le programme ... 124
3.2- Déplacements des taches de diffraction en compression de micro-piliers ... 128
4.- Exigences expérimentales liées au dispositif in-situ de microcompression ... 130
5.- Résultats de la micro-compression in-situ ... 132
5.1.- Cas du pilier « A4 » ... 132
5.1.1.- Courbes mécaniques et pilier déformé ... 132
5.1.2.- Analyse des clichés de diffraction in-situ ... 137
5.2.- Cas du pilier « F3 » ... 145
5.2.1.- Courbes mécaniques et pilier déformé ... 145
5.2.2.- Analyse des clichés de diffraction ... 147
5.3.- Cas du pilier « E3 » ... 150
5.3.1.- Courbes mécaniques et pilier déformé ... 150
5.3.2.- Analyse des clichés de diffraction ... 152
6.- Discussion sur l’origine de la déformation des piliers en compression in-situ ... 154
Bilan du chapitre IV ... 156
Chapitre V ... 158
TRANSITION FRAGILE-DUCTILE : ANALYSE DE MICROSTRUCTURES DE DÉFORMATION À HAUTE TEMPÉRATURE ... 158
1.- Introduction ... 159
2.- Démarche expérimentale ... 159
2.1.- Synthèse et préparation échantillon – Institut Pprime ... 159
2.2.- Essais préliminaires à température ambiante pour choisir les forces – IMM ... 160
2.3.- Essais à TA, 500°C, 700°C et 800°C à 100 et à 200 mN et observations par microscopie optique - IMM ... 160
2.4.- Observations par MO – par AFM – préparation des lames – observations par MET – orientation ASTAR ... 161
3.- Résultats ... 162
3.1- Introduction ... 162
3.2- Comparaison entre empreintes à température ambiante et à haute température ... 162
3.3.- Observations par MET des configurations microstructurales sous deux empreintes réalisées à 800°C 165 3.3.1.- Protocole d’extraction des lames minces ... 165
3.3.2.- Lame extraite sous l’empreinte E4_800°C (200 mN) ... 166
3.3.3.- Lame extraite sous l’empreinte E2_800°C (100 mN) ... 169
CONTENU
Page v
BILAN GÉNÉRAL ET PERSPECTIVES ... 173 Références bibliographiques ... 179
Page vi
Remerciements
Ce travail a été réalisé au sein du laboratoire Institut Pprime au département de Physique et Mécanique des Matériaux (PMM) de l’université de Poitiers.
Cette thèse a été possible grâce à plusieurs collaborations avec des laboratoires comme le « Centre d’élaboration des matériaux et d’études structurales (CEMES) » à Toulouse, le laboratoire « Institut fur Metallkunde und Metallphysik (IMM), RWTH Aachen University » en Allemagne, le groupe « Photons for Engineering and Manufacturing (PEM) » à Paul Scherrer Institut (PSI) en Suisse, la ligne « BM32-IF-Interface Beamline, French CRG, ESRF » à Grenoble et enfin le laboratoire « Science et Ingénierie des Matériaux et Procédés (SIMaP) » à Grenoble.
Je remercie en premier lieu les personnes qui m’ont encadré durant ces trois années de thèse : Ludovic THILLY, Christophe TROMAS et Anne JOULAIN à l’Institut Pprime. Tous m’ont témoigné leur confiance depuis le début et m’ont largement accompagné dans ma recherche par leur compétence, leur sérieux et leur disponibilité en toute circonstance.
Je tiens à exprimer ma reconnaissance à Marc LEGROS (CEMES) et à Guy DIRRAS (Université Paris 13, LSPM) qui ont accepté d’être rapporteurs de cette thèse. J’exprime aussi ma reconnaissance à Jean Sébastien MICHA (ESRF) qui a accepté d’être examinateur de ce travail de thèse et aussi pour avoir accepté de m’accueillir à ESRF tout en me fournissant des précieuses aides qui m’ont permis d’avancer à grand pas pendant la thèse. Je remercie chaleureusement Helena VAN SWYGENHOVEN (PSI), non seulement pour avoir accepté d’être examinatrice et présidente du jury, mais aussi pour ses précieuses aides au cours de la thèse pendant plusieurs séjours en Suisse en sein du groupe PEM qu’elle dirige. Tous ont contribué à l’amélioration de mon travail par leurs remarques et leurs questions.
Je dis un très grand merci à Steven VAN PETEGEM (PSI) pour son apport scientifique qui a été très important à la réalisation de cette thèse.
Je remercie particulièrement la responsable du laboratoire IMM Sandra KORTE pour sa collaboration qui a permis de finaliser ce travail et aussi pour m’avoir accueilli pendant mes deux séjours en sein de son laboratoire en Allemagne. Je n’oublie pas ma rencontre chaleureuse avec ses doctorants, en particulier Christoffer ZEHNDER et Sebastian SCHRÖDERS pour leurs aides.
Je remercie Antoine GUITTON ancien doctorant à Pprime pour la synthèse de mes échantillons et Joan Josep ROA ROVIRA ancien post-doctorant à Pprime pour sa contribution à la préparation de certains échantillons. Mes remerciements s’adressent aussi à Patricia DONNADIEU et Gilles RENOU (SIMaP) pour leurs aides.
J’adresse mes remerciements au responsable du laboratoire dans lequel j’ai évolué pour m’avoir permis de mener à bien mon travail de recherche, ainsi qu’à tous mes collègues de travail : chercheurs, ingénieurs, technicien(e)s et secrétaires, pour m’avoir aidé lorsque je les
Page vi
sollicitais. Je remercie tous ceux et toutes celles avec qui j’ai pu avoir quotidiennement des conversations enrichissantes, en particulier les doctorant(e)s que j’ai côtoyés pendant mes années de thèse : Jean Rony MEDY (aussi compatriote), Damien MAGNE, Fadella LAREK, Senda YAZIDI, Elodie DROUELLE, Sami HAMADE, Aurelie JOSEPH, Benjamin DOUAT, Romuald BEJAUD, Romain BOIJOUX, et, bien sûr tous ceux dont le nom n’est pas cité. Merci enfin à mon épouse Ricardy ALCINDOR qui m’a donné chaque jour l’envie et l’énergie nécessaire pour accomplir ce travail.
INTRODUCTION ET CONTEXTE
Page 1
Introduction et contexte
Les phases MAX sont des matériaux aux caractéristiques étonnantes, combinant certaines propriétés des métaux et des céramiques. Comme les métaux, elles sont relativement faciles à usiner, bonnes conductrices de la chaleur et de l’électricité et comme les céramiques, elles sont réfractaires, rigides, résistantes aux chocs thermiques et à l’oxydation. Ces propriétés combinées sont à l’origine de leur utilité potentielle dans les applications structurelles à haute température, les revêtements protecteurs, les surfaces à coefficient de frottement faible, les contacts électriques, les systèmes micro-électromécaniques etc…[1]. Cependant, leur application est encore limitée en particulier par une transition fragile-ductile observée aux alentours de 900°C [2].
D’un point de vue des sollicitations mécaniques, les phases MAX présentent un comportement original. En effet, lorsqu’elles sont soumises à des essais mécaniques cyclés, une hystérèse est observée à travers les courbes mécaniques obtenues [3]. Dans le cadre de ce travail, nous nous sommes intéressés à l’étude de ce comportement hystérétique et à la transition fragile-ductile de l’une d’entre elle : la phase Ti2AlN, synthétisée par métallurgie des poudres. Le comportement mécanique des phases MAX peut s’étudier à plusieurs échelles. À l'échelle macroscopique, il a été montré que l’agencement et la forme des grains (enchevêtrement des grains sous forme de plaquettes) jouent un rôle important dans le comportement mécanique des phases MAX poly-cristallines en particulier à travers des mécanismes de transfert de charges et de contraintes localisées [4]. À l'échelle microscopique, c’est la structure cristallographique hexagonale des phases MAX qui va jouer un rôle fondamental.
Le cas de la phase MAX Ti2AlN a été étudié d’un point de vue macroscopique lors d’une précédente étude au niveau du laboratoire Institut Pprime via des essais mécaniques à température ambiante [4], [5] et des essais mécaniques à haute température [6]. Ce travail de thèse se focalise aussi sur l’étude de la phase Ti2AlN, mais à l’échelle microscopique. L'étude des mécanismes élémentaires associés à la structure cristallographique nécessite alors la mise en œuvre d'essais de déformation à des échelles micrométriques ou sub-micrométriques, afin de sonder la réponse des grains individuels. Deux techniques expérimentales adaptées sont mises à profit pour mener nos investigations : 1) la compression de micro-piliers et 2) la nano-indentation.
Ce travail se divise en cinq chapitres. Le premier est consacré à un état des lieux sur les travaux qui ont été menés sur les phases MAX dans le domaine des propriétés mécaniques. Le deuxième porte sur la synthèse et les préparations des échantillons de la phase Ti2AlN et les techniques expérimentales mises en œuvre.
Le troisième chapitre décrit les essais de nano-indentation et de compression ex-situ des micro-piliers usinés par faisceau d’ions focalisés (FIB) dans le même matériau et sur les analyses des résultats obtenus par ces deux types d’essais (courbes mécaniques et caractérisation, par
INTRODUCTION ET CONTEXTE
Page 2
microscopie à force atomique (AFM) et microscopie électronique à balayage (MEB), des microstructures de déformation générées).
Dans le quatrième chapitre, il s’agit de présenter des résultats obtenus lors de micro-compression in-situ couplée à la micro-diffraction Laue. Des analyses des courbes mécaniques et des observations post-mortem des piliers par MEB sont effectuées. L’indexation des clichés de diffraction Laue obtenus et la corrélation entre les déplacements des taches de diffraction et les mécanismes de déformation des micro-piliers de phase MAX sont aussi présentées.
Le cinquième chapitre, plus exploratoire, porte sur la transition fragile-ductile et les mécanismes de déformation en température, en utilisant la nano-indentation à haute température. L’analyse des lignes de glissement, par AFM, en surface de quelques empreintes résiduelles est effectuée. Des lames minces sont extraites en coupe transverse à travers ces empreintes pour faire des analyses, par microscopie électronique en transmission (MET), de la configuration des dislocations à l’intérieur du matériau.
Page 3
Chapitre I
Chapitre I : ÉTAT DE L’ART
Page 4
1.- Historique et généralités sur les phases MAX
Après les travaux menés par Jeitschko et ses collègues [7]–[11], Beckmann et ses collaborateurs [12] et Nowotny [13] dans les années 60, menant à la découverte de nouveaux carbures et nitrures ternaires dont la phase Ti3SiC2, ces matériaux n’ont plus été étudiés pendant 30 ans. Dans les années 90, Pietzka et Schuster ont observé de nouvelles phases, en particulier la phase Ti3AlC2 [14]. Dans la même décennie, Barsoum et El-Raghy [15] ont redécouvert les propriétés de l’un de ces carbures, Ti3SiC2 (sa rigidité, sa légèreté, son usinage facile, sa fabrication à partir de matières premières relativement peu coûteuses, sa résistance à l’oxydation et aux chocs thermiques, et sa capacité à être résistante à des températures élevées de plus de 1300°C). Au début des années 2000, Barsoum et ses collaborateurs [16] ont synthétisé une nouvelle phase, le nitrure ternaire Ti4AlN3, ayant des propriétés semblables à la phase T3SiC2. Ils sont arrivés à la conclusion que ces phases partagent une même structure cristallographique les dotant de propriétés similaires. C’est cette identification qui a donné naissance à la nomenclature « phases Mn+1AXn » (avec n = 1, 2 ou 3) ou « phase MAX » où M représente un métal de transition, A est un élément du groupe A du tableau périodique et enfin X est le carbone et/ou l’azote [11]-[12].
Dans la formule générique des phases MAX, « Mn+1AXn » (n= 1, 2, ou 3) [16], les stœchiométries 211 (n = 1) désignent la structure M2AX, 312 (n = 2) la structure M3AX2 et 413 (n = 3) la structure M4AX3.
Tableau 1-I : Tableau périodique des phases MAX avec les différents éléments mis en jeu [17].
• Les éléments « M » sont des métaux de transition du groupe 3 (Scandium (Sc)), du groupe 4 (Titane (Ti), Zirconium (Zr), Hafnium (Hf)), du groupe 5 (Vanadium (V), Niobium (Nb), Tantale (Ta)) et du groupe 6 (Crome (Cr), Molybdène (Mo)).
• Les éléments « A » sont des éléments du groupe 12 (Cadmium (Cd)), 13 (Aluminium (Al), Gallium (Ga), (Indium (In), Thallium (Tl)), 14 (Silicium (Si), Germanium (Ge), l’étain (Sn), Plomb (Pb)), 15 (Phosphore (P), Arsenic (As), ou 16 (Soufre (S)).
Chapitre I : ÉTAT DE L’ART
Page 5
Les éléments chimiques correspondants à « M », « A » et « X », dans la nomenclature « MAX », sont identifiés dans le tableau périodique comme présenté dans le Tableau 1-I.
Aujourd’hui l’existence possible de plus de 70 phases MAX est mentionnée [1]. Environ une cinquantaine possède une structure 211 telles Ti2AlN, Ti2AlC, Nb2SnC.... Pour la structure 312, il y a environ 6 phases connues comme Ti3AlC2, Ti3GeC2, Ti3SiC2, Ti3SnC2, Ta3AlC2, V3AlC2 (ou (V, Cr)3AlC2), la structure 413 donne la possibilité d’avoir ces 7 phases connues : Ti4AlN3, Ti4SiC3, Ti4GeC3, V4AlC3, Ti4GaC3, Nb4AlC3, Ta4AlC3. Il est à noter que les deux phases Ti4SiC3 et Ti4GeC3 n’ont été synthétisés que sous forme de films minces [1]. Dans un article publié en 2006, Zhijun Lin et al. ont mentionné une phase MAX jusque-là inconnue, la phase Ta6AlC5 (n = 5) qui forme une structure entremêlée avec le Ta4AlC3 selon une observation au microscope électronique et transmission (MET) [18]. Il existe d’autres structures, nommées « 523 » (dont la maille est définie comme une combinaison d’une structure « 312 » et celle de « 211 ») et « 725 » (combinaison des « 312 » et « 413 »), qui ne sont pas conformes à la formule générique Mn+1AXn, mais qui coexistent avec des structures qui respectent la formule générale. C’est le cas par exemple de Ti5Si2C3 ou Ti7Si2C5 qui s’entremêlent avec la phase Ti3SiC2, entre autres [16]-[17].
1.1.- Structure cristallographique des phases MAX
Les phases MAX possèdent le groupe d’espace P63/mmc, elles présentent une structure lamellaire à maille cristallographique hexagonale. Cette dernière est présentée pour chaque structure à la Figure I- 1. Le paramètre de maille a est de l’ordre de 3 Å pour les trois structures « 211 », « 312 » et « 413 », mais le paramètre de maille c varie selon la structure, ainsi c ~ 13 Å pour la structure « 211 », c ~ 18 Å pour la structure « 312 » et c ~ 23-24 Å pour celle de « 413 ». Donc les phases MAX ont une structure anisotrope avec un rapport de c/a supérieur à 3.
Il est à remarquer que dans chaque maille, quelle que soit la structure, l’élément « X » se trouve au centre d’un octaèdre formé par les éléments « M » (ex : Ti6C). Selon que la structure est 211, 312 ou 413, le nombre d’octaèdres, disposé suivant l’axe c de la maille sera 1, 2 ou 3 respectivement. Dans le cas de la structure 211, deux couches formées d’éléments « M », i.e. un plan d’octaèdre avec l’élément « X » au centre, sont alternées avec une couche d’éléments « A ». Pour la 312 une couche d’élément « A » toutes les trois couches d’éléments « M » (deux plans d’octaèdres), enfin pour la 413 une couche d’éléments « A » toutes les quatre couches d’éléments « M » (trois plans d’octaèdres).
Les liaisons mixtes M-X (métalliques-covalentes) sont exceptionnellement fortes alors que les liaisons M-A sont relativement faibles.
Chapitre I : ÉTAT DE L’ART
Page 6
Figure I- 1 : Mailles cristallographiques des structures « 211 », « 312 » et « 413 » des phases MAX [21].
1.2.- Synthèse des Phases MAX
Il existe aujourd’hui plusieurs techniques de synthèse des phases MAX. Ces techniques peuvent être regroupées en deux familles principales : méthode de synthèse des films minces et celle de fabrication des matériaux massifs. La première regroupe les techniques suivantes [1] : 1) réactions de synthèse à l’état solide, 2) dépôts chimiques en phase vapeur (Chemical Vapor Deposition (CVD)), 3) dépôts physiques en phase vapeur (Physical Vapor Deposition (PVD)), et 4) projection thermique qui est une méthode permettant d’avoir des revêtements épais (≥ 100 µm).
La deuxième famille contient les techniques suivantes : 1) compression isostatique à chaud (CIC) ou (Hot Isostatic pressing (HIP)) [15], [22]–[27], 2) frittage sans pression (Pressureless sintering (PS)) [28]–[34], 3) synthèse par auto-propagation à haute température (self-propagating high-temperature synthesis) [35]–[37], 4) spark plasma sintering (SPS) [35], [38]– [42], 5) frittage par impulsion de décharge (pulse discharge sintering (PDS)) [43]–[48], 6) synthèse par réaction solide-liquide (Solid–liquid reaction synthesis) [49]–[51].
Parmi toutes les techniques précitées, seule la technique de compression isostatique à chaud (CIC) a été utilisée pour synthétiser la phase MAX Ti2AlN, sous forme massive, étudiée dans le cadre de cette thèse. Cette technique permet d’avoir un matériau très dense : on peut obtenir plus de 95 % de phase MAX pure après fabrication d’un échantillon de Ti3SiC2 par exemple [15]. La phase Ti2AlN synthétisée par CIC, peut contenir les phases secondaires Al2O3, Ti4AlN3, TiN, Ti3AlN, TiAl, AlN et TiAl3 [21].
Chapitre I : ÉTAT DE L’ART
Page 7
2.- Plasticité des phases MAX
2.1.- Systèmes de glissement dans les matériaux à maille
hexagonale
En général, le plan le plus dense des matériaux à maille hexagonale est le plan de base (0001) et les directions les plus denses sont de type <11-20> [52]. Les vecteurs les plus courts du réseau sont donc parallèles aux directions denses <11-20> (Ces dernières sont générées par les axes a des plans de base (cf. Figure I- 2) En conséquence, le système de glissement le plus favorable, à quelques exceptions près (ex : Titane, Zirconium), est le système (0001) <11-20>. Dans ce cas, les dislocations ont des vecteurs de Burgers de type a (� = 1/3 <11-20> (par permutation on obtient les trois vecteurs de Burgers différents) et glissent dans le plan (0001) [52].
Figure I- 2 : Les mailles cristallographiques avec les différents systèmes de glissement existant dans les matériaux à maille hexagonal. « * » signifie que ce sont ces systèmes de glissement théoriques obtenus à partir du critère de la contrainte de cisaillement projetée [53].
D’autres systèmes de glissement (cf. Figure I- 2) ont été observés dans des matériaux hexagonaux avec un rapport c/a faible (~ 1,60) tels le titane (Ti), le Zirconium (Zr) et le Béryllium (Be). Par exemple le Béryllium active les plans suivants : 10}, 12}, {10-13}, {10-14} ainsi que le plan (0001) avec une même direction de glissement de type <11-20> [54]. Le Zirconium [55] et le Titane [56] privilégient les plans prismatiques {10-10} par rapport au plan (0001) car la contrainte de cisaillement critique projetée dans ce dernier est plus élevée que celle projetée dans la première famille de plans, mais toujours avec la même direction de glissement dense de type <11-20>. Les causes de l’activation favorable des systèmes
non-Chapitre I : ÉTAT DE L’ART
Page 8
basaux dans le Ti et le Zr sont encore mal connues. Pour ces trois matériaux, les systèmes de glissement ont leurs vecteurs de Burgers s’orientant toujours dans les directions <11-20> c’est-à-dire de type a.
À haute température, on observe l’activation des systèmes {10-11} <1-201> dans des matériaux à maille hexagonale à rapport c/a élevé, comme le Zinc (Zn, c/a = 1,86), le Cadmium (Cd, c/a = 1,89) et le Magnésium (Mg, c/a = 1,69) [57]. A basse température, la famille de plans {11-22} avec un vecteur Burgers de type a + c (famille <-1-123>) (cf. Figure I- 2) peut être activé dans le Zn [58], [59] et dans le Cadmium [60]. L’observation de glissement dans les plans {10-10} et {10-11}, avec une direction de glissement de type a, a été faite dans le Zinc et le Magnésium lorsqu’une charge en compression ou en tension a été appliquée parallèlement aux plans de base [61]. D’autres systèmes de glissement hors plans de base sont possibles dans le Zn, Cd et Mg si la contrainte de cisaillement projetée dans le plan de base est la plus faible [62]. Hirth et. Lothe ont présenté d’autres exemples de systèmes de glissement dans les matériaux à maille hexagonale [53].
Dans le cas particulier des phases MAX, comme dans les autres matériaux à maille hexagonale, le système le plus rencontré est le (0001) <11-20> : à température ambiante, dans le Ti3SiC2 [63]–[66] et Ti2AlN [5]. A haute température (900°C), Guitton et al. ont montré que le système {0-110} <11-20> est activé dans Ti2AlN déformé par essai de compression [6].
2.2.- Arrangement des dislocations dans les phases MAX
La compréhension de la nature et des arrangements des dislocations dans les phases MAX qui ont un rapport c/a beaucoup plus élevé que les matériaux à maille hexagonale déjà cités, joue un rôle très important dans l’étude de leurs comportements mécaniques. Des observations par MET ont été effectuées pour étudier le comportement des dislocations dans les phases MAX. En effet, Farber et al. [63], [67], Barsoum et al. [68] et Kooi et al. [64] ont effectués des études, par MET sur des échantillons de Ti3SiC2 déformés, qui ont révélées que les dislocations se situent dans les plans de base et s’arrangent soit en murs perpendiculaires aux plans de base (formant des sous-joints plus ou moins désorientés, voir Figure I- 3 B)), soit en empilements parallèles aux plans de base (voir Figure I- 3 A)). Chaque mur de dislocations a une composante d’inclinaison et une composante de torsion. Ce mur peut être vu donc comme une accumulation de dislocations parfaites mixtes parallèles et alternées, avec deux vecteurs de Burgers différents, glissant dans le plan de base à un angle de 120° les uns par rapport aux autres. La torsion est due à un excès d’un type de dislocations. Ces dislocations ont un vecteur de Burgers de type 1/3 <11-20> [63] [64]. L’arrangement des dislocations, selon ces auteurs [63] [64] [68], à la température ambiante dans les phases MAX est schématisé à la Figure I- 3 C).
Chapitre I : ÉTAT DE L’ART
Page 9
Figure I- 3 : A) Image MET en champ clair des empilements de dislocations dans le Ti3SiC2, Barsoum et al. 1999b [68]. B) Image MET en champ sombre d’un mur de dislocations, dans le Ti3SiC2, Kooi et al. 2003 [64]. C) Schéma en 2D des configurations caractéristiques de dislocations observées à température ambiante (mur perpendiculaire au plan de base et empilement dans le plan de base).
En se basant sur l’observation des dislocations dans le Ti3SiC2 [63], [64], [67], [68] et sur le fait qu’une dislocation hors plan de base aurait un vecteur de Burgers supérieur au paramètre de maille c ~ 11-23 Å, Barsoum et ses collègues ont conclu que seules les dislocations appartenant au plan base existent dans les phases MAX, qu’elles se multiplient et sont mobiles même à 77 K [65]. Toujours selon Barsoum et al., aucune réaction n’existe entre ces dislocations lorsqu’elles glissent dans le plan de base et la déformation de la phase MAX peut être produite sans durcissement [65], [66]. Cependant, contrairement à ces conclusions, Guitton et al. [5] ont montré plus récemment que des réactions et des interactions entres dislocations existent dans le cas de la phase MAX Ti2AlN déformée sous pression de confinement à température ambiante (cf. Figure I- 4).
Chapitre I : ÉTAT DE L’ART
Page 10
Figure I- 4 : Figure extraite de la référence [5]. a) Réaction des dislocations dans le Ti2AlN à la température ambiante. b) Schématisation de la réaction observée à la partie a). c) Interaction entre dislocations dans le Ti2AlN à la température ambiante. d) Un schéma de la configuration de l’interaction de la partie c). Les flèches sur b) et d) représentent les vecteurs de Burgers.
À la Figure I- 4 a), l’image MET, obtenue avec un vecteur de diffraction g = [-1-120], montre la réaction de deux dislocations du plan de base, b1 + b2 = b3 (2 + 3 = 5 et 1 + 4 = 5) dans Ti2AlN déformé à température ambiante (b1 = ± 1/3[-12-10], b2 = ±1-120] et b3 = ± 1/3[-2110]). Pour obtenir l’image de la configuration de la Figure I- 4 c), le vecteur de diffraction utilisé est g = [1-10-3]. Les notations I, II et III désignent des configurations avec deux dislocations. Les parties b) et d) de la Figure I- 4 sont des représentations schématiques de la configuration de la réaction en a) et celle de l’interaction en c) respectivement.
D’autres études ont montré aussi que l’existence de dislocations hors plan de base dans les phases MAX est possible. En effet, Joulain et al. [69] ont effectué des analyses par MET sur un
Chapitre I : ÉTAT DE L’ART
Page 11
échantillon de Ti4AlN3 synthétisé par la technique de compression isostatique à chaud (CIC). Ils ont confirmé la coexistence de dislocations basales et hors plan de (voir Figure I- 5 A)).
Figure I- 5 : A) Images MET, en faisceau faible, des réseaux, dans un grain de Ti4AlN3, de dislocations et de mur (rectangle A) de dislocations parallèles au plan (0 1 -1 0). Les flèches blanches et noires indiquent des dislocations hors plans de base (Rectangle B), Joulain et al. 2008 [69]. B) En haut, une image AFM en mode signal d’erreur proche d’une arête d’une empreinte d’indentation effectuée à une force de 150 mN à la surface d’un échantillon de Ti3SnC2. En bas, vue agrandie de la zone sélectionnée (carré blanc) sur l’image au-dessus. Les deux lignes de glissement β observées présentent de petits segments, orientés à -55° à partir de la projection de l'axe c, qui ont été attribués à un double glissement dévié dans le système de glissement pyramidal du premier ordre, Tromas et al. 2011 [70].
Tromas et al. [70] ont réalisé des études par nanoindentation et montré, par analyse des lignes de glissement autour d’empreintes résiduelles, par microscopie à force atomique (AFM), que les systèmes de glissement des plans pyramidaux du premier et second ordre, donc hors plan de base, ont été activés dans certains grains de la phase MAX Ti3SnC2 (voir Figure I- 5 B)).
Récemment, Guiton et al. ont montré que des dislocations peuvent glisser hors plan de base dans le Ti2AlN [6] (voir Figure I- 6) déformé par compression uni-axiale sous pression de confinement à haute température (~ 900 °C), avec une vitesse de déformation de 5.10-5s-1. Zhang et al [71] ont aussi montré qu’à haute température (1000°C-1200°C) l’arrangement des dislocations dans la phase Ti3AlC2 dépend de la vitesse de déformation. Ils ont ainsi montré que lorsque le Ti3AlC2 est déformé par compression à 1200°C avec une vitesse de déformation de 10-4 s-1, les dislocations sont confinées dans les plans de base, alors que lorsque la vitesse de déformation diminue, des dislocations hors plan de base, en accord avec les travaux de Guitton et al. [6], sont observées. En effet, à 1200°C, des dislocations appartenant aux systèmes de glissement prismatiques ou pyramidaux du premier ordre ont été mises en évidence dans un échantillon de Ti3AlC2déformé par compression uni-axiale avec une vitesse de déformation de 10-5 s-1.
Chapitre I : ÉTAT DE L’ART
Page 12
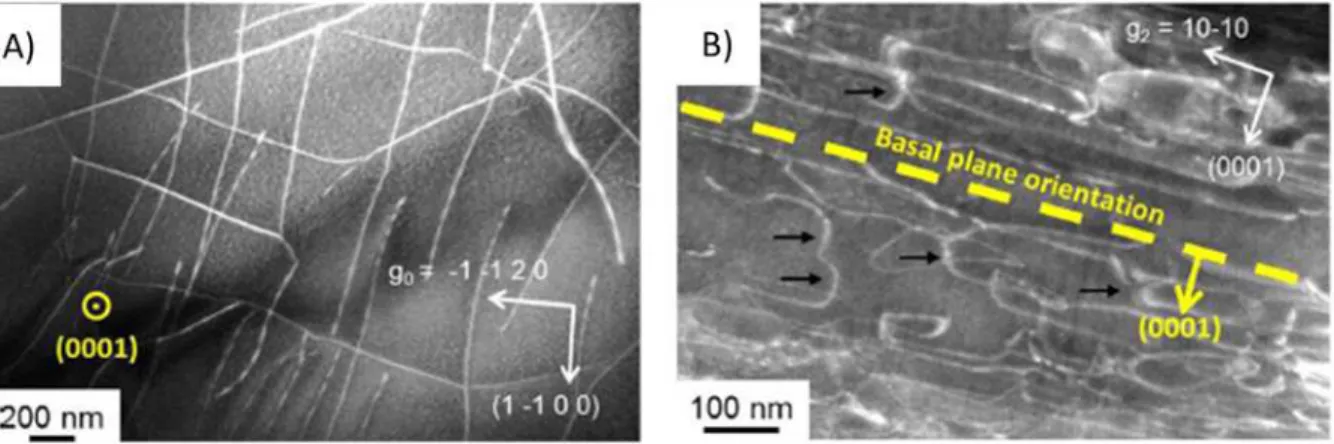
Figure I- 6 : Comparaison de deux configurations typiques de dislocations de la phase MAX Ti2AlN déformée à température ambiante (A)) et à 900°C (B)). L’orientation du plan de base est indiquée dans les deux cas. Les flèches noires, à la partie B), indiquent les dislocations hors plan de base [6].
2.3.- Réponses mécaniques à température ambiante lors des
essais monotones
2.3.1.- Allures des courbes mécaniques en compression
Barsoum et El-Raghy ont montré que, lorsqu’un échantillon fortement texturé de la phase MAX Ti3SiC2 est soumis à des sollicitations mécaniques en compression monotone à la température ambiante, la réponse est très anisotrope [72].
Figure I- 7 : A) Courbes contrainte-déformation obtenues par compression, à température ambiante, des
échantillons poly-cristallins en forme de cube (2 mm d’arête) fortement texturés de Ti3SiC2 et une représentation schématique du cube avec les orientations des plans de base [66]. B) Courbes contrainte-déformation obtenues par compression (avec vitesse de déformation 5.10-5 s-1), de Ti2AlN à température ambiante, sous pression de confinement (320 MPa) [5].
Chapitre I : ÉTAT DE L’ART
Page 13
En effet, lorsque les plans de base sont orientés d’une manière favorable au glissement (l’axe x de la Figure I- 7 A)), les échantillons atteignent leur limite d’élasticité à une contrainte égale à 200 ± 10 MPa environ. En revanche, lorsque les plans de base sont parallèles à l’axe de compression (l’axe z de la Figure I- 7 A)), orientation défavorable à la déformation par glissement de dislocations dans le plan de base, les courbes contrainte-déformation montrent un maximum aux contraintes 230 et 290 MPa suivi d’un adoucissement (voir Figure I- 7 A)). Guitton et al. [5] ont montré que (voir Figure I- 7 B)), à température ambiante, lors des essais de compression sous pression de confinement, le Ti2AlN atteint le régime plastique avec une contrainte maximale de compression de 1,3 GPa. Une déformation plastique de plus de 5% peut ainsi être atteinte. Ces courbes montrent aussi un adoucissement après un régime de durcissement (entre 1100 et 1300 MPa).
2.3.2.- Kink bands, délaminations et mécanismes de formation
La Figure I- 8 A)), montre une représentation schématique d’une kink band (ou pliure en genoux). L’axe de compression est verticale dans ce schéma [72].
Figure I- 8 : A) Représentation schématique d’une kink band selon le modèle d’Orowan. L’axe de compression
est vertical dans le schéma [72]. B) Image MEB de kink-bands et de délaminations observées dans le Ti3SiC2 polycristallin après déformation par compression à la température ambiante [72]. C) Image MET en champ clair d’une kink-band avec un grand angle de désorientation. Les murs de dislocations séparés, qui sont normaux aux plans de base mais inclinés par rapport aux joints de kink, sont notés V [68]. Ces observations ont été effectuées aussi sur un échantillon de Ti3SiC2 polycristallin déformé par compression à température ambiante.
Chapitre I : ÉTAT DE L’ART
Page 14
La déformation par kink (coude) est attendue dans des matériaux à maille hexagonale possédant un rapport c/a supérieur à 1.731 [73].
Les phases MAX sont des matériaux à maille hexagonale et ayant un rapport c/a supérieur à 3. En conséquence, la déformation de celles-ci par un processus de kink band est fréquemment observée. En effet, Barsoum et al. [72] ont montré que lorsque les plans de base sont parallèles à l’axe de compression (orientation défavorable à la déformation par glissement de dislocations), les phases MAX se déforment par une combinaison de kink bands, de bandes de cisaillement et de délaminations dans les grains individuels (voir le cas de Ti3SiC2 Figure I- 8
B)). Un autre exemple de kink band observé par MET est présenté Figure I- 8 C) [68]. Par extension, tout matériau appartenant à la famille de phases Mn+1AXn est soumis à ce mode de déformation.
Après l’observation des kink-bands, en 1942, dans un échantillon cylindrique monocristallin de cadmium (Cd) déformé par une charge appliquée parallèlement aux plans de base, Orowan a suggéré que celles-ci se sont développées par un mécanisme spécial dans lequel des lamelles d’épaisseur uniforme glissent pour se casser brusquement vers une position inclinée par rapport à la direction de glissement initiale. C’est ainsi que se forment les joints de kink. Sa conclusion a été que ces derniers sont constitués de plans (qui ne sont pas des plans cristallographiques), dans lesquels les dislocations sont concentrées, qui divisent en deux parties égales l’angle entre les plans de glissement de part et d’autre [74] (voir les joints BC et DE Figure I- 9 d). Un modèle a été proposé plus tard pour expliquer la formation des kink bands : le modèle de Hess et Barret [73].
2.3.3.- Formation des kink bands selon le modèle de Hess et Barret
En 1949, Hess et Barrett ont observé qu’un échantillon cylindrique monocristallin de Zn se déforme par la formation des kink bands lorsque l’axe de compression était parallèle au plan de base. Ces auteurs ont proposé un modèle pour expliquer la formation de ces kink bands par le glissement régulier de dislocations [73]. Leur modèle est illustré schématiquement Figure I- 9.
La modélisation du phénomène peut être résumée ainsi : au début, lorsque la charge est appliquée parallèlement à une colonne de longueur L, la flexion élastique (Figure I- 9 a) de celle-ci crée une contrainte de cisaillement maximum aux deux sections localisées en L/4 et 3L/4 (Figure I- 9 b) respectivement en supposant une symétrie parfaite du problème.
Chapitre I : ÉTAT DE L’ART
Page 15
Figure I- 9 : Processus de formation d’un kink band selon le modèle de Hess et Barret [73].
La contrainte de cisaillement, au-dessus d’une valeur critique, fait apparaitre, des paires de dislocations coin de vecteurs de Burgers opposés glissant en sens contraire dans la région susceptible de devenir la bande (Figure I- 9 c)). Au final, deux régions sévèrement pliées apparaissent et sont caractérisées par deux sous-joints de flexion ou plans de « kink » BC et DE bien définis. Ces derniers sont séparés l’un de l’autre par une partie non pliée du cristal (Figure I- 9 d)). Les rotations des parties du cristal observées sont dues à l’excès d’un type de dislocations coin accumulées aux sous-joints de flexion ou « kink ».
2.4.- Réponses mécaniques à haute température lors des
essais monotones
À haute température, les phases MAX présentent à travers leurs réponses mécaniques une transition fragile-ductile (voir Figure I- 10) [2]. Cette transition fragile-ductile peut être observée lorsque les phases MAX sont soumises à des sollicitations mécaniques entre 850 et 1100°C [2], [6], [65], [66].
Chapitre I : ÉTAT DE L’ART
Page 16
Figure I- 10 : A) Courbes contrainte-déformation, à différentes températures, obtenues après compression d’un
échantillon de Ti3SiC2poly-cristallin. Aux alentours de 850-900°C, une transition fragile-ductile a été observée [2]. Vitesse de déformation 6.10-4 s-1. B) Courbes contrainte-déformation obtenues, à température ambiante (en bleu) et à haute température (en rouge), après compression (vitesse de déformation 5.10-5 s-1) d’un échantillon de Ti2AlN, sous pression de confinement [6].
Chen et al. [75], Barsoum et al. [65], [66] et d’autres études [76], [77] (voir Figure I- 11) ont montré que la ténacité K1c de la phase Ti3SiC2 chute systématiquement au-delà de la température fragile-ductile. Cette diminution de K1c implique que les fissures se propagent plus
facilement lorsque la température est élevée. Ces constats ont permis, à Barsoum et ses collègues, de conclure que l’activation de tout système de glissement hors plans de base est exclue aussi à haute température [2], [65], [66]. La transition fragile-ductile a été associée à la contrainte de décohésion des joints de grains et/ou la contrainte de la délamination qui dépendent de la température [65], [66].
Figure I- 11 : Ténacité en fonction de la température pour plusieurs phases MAX d’après Wan et al [77]. Les
courbes a) et b) présentent le cas de Ti3Si(Al)C2 à petits grains (~15 µm) et à gros grains (~49 µm) respectivement. Celles de c) et d) représentent, respectivement, le cas du Ti3AlC2 à petits grains (~ 28 µm) et du Ti3AlC2 gros grains (~ 75 µm).
Chapitre I : ÉTAT DE L’ART
Page 17
Cependant, Guitton et al. [6] ont montré que la transition fragile-ductile (voir Figure I- 10 b)) semble plutôt liée à la multiplication des systèmes de glissement susceptibles d’être activés lorsque la température augmente. C’est ainsi que des glissements déviés ont été observés et caractérisés après des observations post-mortem des échantillons déformés par compression, à 900°C, sous pression de confinement. L’activation de ces nouveaux systèmes de glissement contribue à la diminution de la limite d’élasticité à haute température (750 MPa) par rapport à température ambiante (1100 MPa) (voir Figure I- 10 B)) [6].
De leur côté, Zhang et al [71] ont montré que même à 1000°C, la phase Ti3AlC2 montre un caractère fragile lorsque la vitesse de déformation est élevée (10-2 s-1-10-3 s-1) : pour initier de la déformation plastique i.e. pour qu’une limite d’élasticité puisse apparaitre sur la courbe contrainte-déformation, la vitesse de déformation doit être inférieure à 10-3 s-1, même à haute température (1000°C – 1200°C). À cette vitesse de déformation, un durcissement suivi d’un adoucissement a été observé sur les courbes contrainte-déformation obtenues en compression [71]. Cependant l’adoucissement est très faible à 1200°C pour une vitesse de déformation de 10-5 s-1. En effet, avec cette dernière, à 1200°C, un durcissement est remarqué jusqu’à 26 % de déformation sur une déformation totale de 27%[71].
En traction, la réponse mécanique de la phase Ti3SiC2 dépend aussi fortement de la température et de la vitesse de déformation. Au-dessous de la température de transition fragile-ductile, la phase MAX est fragile, tandis qu’au-dessus de la température de transition, à une vitesse de déformation faible (~1,38.10-6s-1), elle est plastique avec une rupture apparaissant à une déformation pouvant atteindre la valeur de 25% dans certains cas [78], [79]. La rupture est alors majoritairement due aux dommages accumulés sous forme de cavités, de pores, des microfissures, de délaminations [66], [78], [79].
3.- Comportement hystérétique lors des essais
mécaniques cyclés
3.1- Terminologies
Élasticité : on parle d’élasticité (linéaire ou non-linéaire) lorsque la contrainte et la déformation
sont reliées de façon biunivoque selon la relation σ = E*ɛ [80], σ étant la contraint appliquée, E le module d’Young du matériau, et ɛ la déformation. Un comportement élastique non-linéaire implique que le module instantané varie avec l'état de contrainte.
Anélasticité : il y a anélasticité si la courbe contrainte-déformation forme une boucle lors d’un
chargement cyclique. La présence de cette boucle traduit la non-biunivocité de la fonction σ = f(ɛ) [80].
Chapitre I : ÉTAT DE L’ART
Page 18
Réversibilité : lorsqu’un cycle charge-décharge est appliqué à un matériau, la déformation subie
par celui-ci est dite réversible si le point d’arrivée de la courbe de décharge rejoint le point de départ de la courbe-charge. Cette réversibilité est dite linéaire si la courbe de charge suit le même chemin que celle de décharge (cycle charge-décharge fermé) et si ce n’est pas le cas elle est dite non-linéaire (cycle charge décharge ouvert).
Comportement hystérétique : nous appellerons comportement hystérétique, dans la suite de ce
manuscrit, tout comportement d’une courbe (contrainte-déformation ou force-déplacement) ouverte et réversible.
3.2- Hystérèse à travers les courbes mécaniques
Certains matériaux, y compris les phases MAX, ont montré, à travers leurs réponses mécaniques, un comportement hystérétique lorsqu’ils sont soumis à des sollicitations mécaniques cyclées sans que ces dernières n’entrainent une déformation plastique supplémentaire. En d’autres termes, lorsque le matériau a subi un cycle charge-décharge, la courbe mécanique obtenue est telle que la ligne de charge et la ligne de décharge ne suivent pas le même chemin, mais se rencontrent, à la décharge complète, au point initial de la charge. On obtient donc une courbe ouverte et réversible. Cette ouverture de la courbe charge-décharge correspond à une dissipation d’énergie [3].
Le comportement hystérétique a été rapporté, par exemple, dans l’Uranium (U) [81], [82], le Zirconium (Zr) [83], [84], le Magnésium (Mg) et/ou ses alliages [84]–[87], le Titane (Ti), le Zin (Zn) et le Cobalt (Co) [84], [88], l’oxyde de Magnésium (MgO) [89], le Saphir (Al2O3) [90], le graphite [91], le mica [92], [93] le carbone vitreux (glass-like carbon) [94], le Dioxyde de Zirconium tétragonal (ZrO2) [95], les alliages à mémoire de forme TiNi [96], [97], les alliages ordonnés Ti50Ni47Fe3 et Ti49Ni51 [98], le Niobate de lithium (LiNbO3) [99] et les phases MAX [3], [4], [31], [100]. Certaines courbes contrainte-déformation hystérétiques typiques sont présentées à la Figure I- 12.
Chapitre I : ÉTAT DE L’ART
Page 19
Figure I- 12 : Hystérèse observée à travers les courbes mécaniques de plusieurs matériaux à maille hexagonale
déformés en compression. a) Courbes contrainte-déformation hystérétiques de la phase MAX Ti3SiC2 en bleu (échantillon à gros-grains), en rouge et noir (échantillon à petits-grains) [66], b) Cycles d’hystérésis d’un échantillon polycristallin de la phase MAX Ti2AlC dense à gauche et 90% dense à droite [31], c) Courbes contrainte-déformation hystérétiques à 300 ◦C d’un échantillon polycristallin de Cobalt. Il est à remarquer un fluage très faible au cours de chaque cycle. En bas à droite, des courbes contrainte-déformation à 500 ◦C; pas de boucles d'hystérésis observés [88] d) Cycles d’hystérésis d’un échantillon polycristallin de Magnésium à deux vitesses de déformation différentes [87].
Chapitre I : ÉTAT DE L’ART
Page 20
4.- Les approches et modèles d’explication du
comportement hystérétique
Etant donné que l’une des problématiques de ce travail de thèse est de comprendre le comportement hystérétique des courbes mécaniques de la phase MAX Ti2AlN en configuration monocristalline, nous allons exposer, dans cette partie, les théories disponibles dans la littérature pour expliquer ce phénomène d’hystérèse.
4.1. – Explications par mouvement des macles ou
changement de phase
Maclages
Dans les articles mentionnés dans cette partie 4.1, les auteurs ont utilisé les termes boucle d’hystérésis, effet pseudo-élastique ou effet anélastique, indistinctement. Ils sont partis du principe que toute non-linéarité de la courbe de décharge, par rapport à la charge, peut-être dénommé pseudo-élasticité. Et après recharge, cette non-linéarité conduit à une boucle d’hystérésis. Ce comportement pseudo-élastique est associé au mouvement réversible de macles conduisant à de larges boucles d’hystérésis observées dans des métaux polycristallins soumis à des tests cyclés de traction ou de compression après avoir été plastiquement pré-déformés [82], [83], [85], [86].
Jones et Munro [82] ont rapporté des cycles d’hystérésis comme réponses mécaniques de l’Uranium de structure cristallographique orthorhombique. Ces cycles ont été interprétés par la déformation non-uniforme des matériaux polycristallins sous contrainte extérieure [82] ou l’effet réversible des macles en invoquant les travaux de Cahn sur les maclages dans l’Uranium [81].
Le comportement hystérétique a été constaté à travers les réponses mécaniques du Zirconium (Zr) pré-déformé à 77 K et soumis à des tests de traction cyclés à la température ambiante[83]. Reed-Hill et al. [83] ont interprété l’hystérèse de ces courbes mécaniques en invoquant les mouvements réversibles des joints des macles de type {11-21}. Ces dernières ont été nucléées lors de la pré-déformation plastique à 77 K.
Les auteurs [83] ont remarqué, après une déformation plastique de 1%, une stabilisation de la taille des boucles d’hystérésis. Cette stabilisation a été associée à un effet combiné de deux facteurs : (1) la saturation du nombre de macles, (2) la diminution de la mobilité des joints de macles de type {1 1-21} due à l’augmentation de la densité de dislocations et la formation des macles de type {1 0-1 2} [83].
Chapitre I : ÉTAT DE L’ART
Page 21
Gharghouri et al. [85] ont utilisé la diffraction des neutrons pour montrer que le comportement hystérétique du Mg pur et de l’alliage Mg-8%Al, sollicités in-situ en tension et compression cyclées, est dû aux mouvements réversibles des macles de type {10-12}, avec contributions des macles de type {10-11}. Ces macles sont dues à la forte texture de ces matériaux lorsqu’ils sont sollicités en tension cyclée ; leurs dimensions s’accroissent au moment où le cristal est comprimé, et s’inversent partiellement lors de la décharge [85].
C. H. Càceres et al. [86] ont réalisé des essais mécaniques cyclés (en tension et en compression) sur des échantillons d’alliage de Magnésium AZ91 (i.e. contenant 9 % Al et 1 % Zn). Ils ont remarqué qu’en soumettant ces échantillons à des cycles charge-décharge, les courbes mécaniques présentent de larges boucles d’hystérésis après une petite pré-déformation plastique.
Ces auteurs [86] ont rapporté qu’après 50 cycles charge-décharge, la largeur des boucles d’hystérésis diminue de moitié. Les effets pseudo élastiques (largeur des boucles d’hystérésis) sont renforcés dans le cas des grains de petite taille (boucles larges pour un échantillon avec des grains de taille 10 µm et moins larges avec celui dont les grains sont de taille 130 µm), ce qui est l’inverse de ce que l’on a rapporté habituellement dans le cas des phase MAX [3], [21]. Les effets observés peuvent être compris comme un mouvement partiellement réversible des macles de type {10-12} [86] et non pas à la plasticité basée sur le mouvement des dislocations [86].
Dans les alliages ordonnés Ti50Ni47Fe3 et Ti49Ni51, et sous certaines conditions, le maclage mécanique de type {114} est accompagné d’un réarrangement étendu d’atomes, souvent désigné comme pseudo-maclage de type {112} : il se traduit par des boucles d’hystérésis après un cycle charge-décharge [86], [98].
L’explication de la réponse mécanique hystérétique des matériaux venant d’être cités dans cette partie est basée sur le phénomène pseudo-élastique du maclage. Ce phénomène est résumé par le mouvement réversible des joints de macles. La position des macles dans l’état déformé n’est pas stable, et une force motrice les force à revenir à leurs positions initiales après la décharge [101].
Changement de phase dans les alliages à mémoire de forme
Le comportement hystérétique est aussi observé dans les réponses mécaniques des alliages à mémoire de forme [96], [97], tel le Nitrure de Titane (TiNi). Il est dénommé super-élasticité et est expliqué par la stabilité-instabilité des plaques martensitiques, c’est-à-dire la transformation d’austénite en martensite. En effet, ce phénomène est observé quand le matériau est mécaniquement sollicité dans une plage de température critique dans laquelle des plaques martensitiques sont stables avec l’application d’une contrainte, mais deviennent instables quand la contrainte est retirée.[97], [102], [103]. La super-élasticité est alors liée à la possibilité de grande déformation de ces matériaux dans un domaine « élastique ». Elle se manifeste par une récupération complète de la forme de l’échantillon lorsque la contrainte cesse d’être appliquée [104].
Chapitre I : ÉTAT DE L’ART
Page 22
4.2. - Les Incipients Kink Bands (IKBs)
4.2.1.- Le modèle de Frank et Stroh : équilibre de deux murs de
dislocations sous contrainte
Avant de présenter le modèle de Barsoum et al. [105] basé sur le concept IKB, il faut évoquer le modèle de Frank et Stroh [106] qui lui a servi de base.
En 1952, Frank et Stroh [106] ont proposé, pour expliquer la formation des kink bands, un modèle plus complet que celui de Hess et Barret [73] évoqué plus haut. En effet, dans leur modèle, Frank et Stroh ont postulé que des paires de dislocations coin de signes opposés naissent et croissent suivant un contour elliptique (indiqué par T sur la Figure I- 13 a), ce dernier étant repris à deux dimensions sur la Figure I- 13 e) pour plus de clarté) lorsque la contrainte de cisaillement dépasse une valeur critique.
Figure I- 13 : Processus de formation des kink bands selon le modèle de Frank et Stroh [106]. Les parties a), b),
c) et d) sont issues de la référence [68].
Si les paires de murs de dislocations, ainsi créées, restent à l’intérieur du cristal ou du grain, les murs s’attirent, mais sont maintenus à distance par la contrainte extérieure appliquée (Figure I- 13a) et e)). Cependant, lorsque les murs de dislocations débouchent sur une surface libre, ils deviennent des plans parallèles et l’attraction disparait entre eux (Figure I- 13 b). Selon le mécanisme proposé dans ce modèle, un angle minimal de rotation du réseau est exigé pour que l’accroissement du mur de dislocations soit possible. Pour un métal, cet angle minimal est de 3° [68]. Une contrainte croissante force alors les murs à se séparer et à s’éloigner. La même source peut être à la base du processus répété de formation des murs, donnant ainsi naissance à de nouveaux murs de dislocations (Figure I- 13 c) et d)). Deux murs de dislocations désorientés
Chapitre I : ÉTAT DE L’ART
Page 23
peuvent s’unir en un seul si les dislocations constitutives ne sont pas dans les mêmes plans de glissement et, en général, cette configuration diminue l’énergie totale du joint (Figure I- 13 d).
Dans le modèle de Frank et Stroh, l’accumulation de plusieurs murs dans une région explique la formation des joints de kink. Cette accumulation de murs de dislocations est expliquée de la manière suivante : chaque mur se trouve à un angle différent de la direction de charge à la suite des changements successifs de direction de réseau (Figure I- 13 d). L’augmentation de la contrainte de cisaillement dans chaque mur successif formé traduit leur mouvement rapide qui, lui, conduit à leur accumulation.
Il est à noter que la configuration ayant la plus basse énergie est celle où le mur de dislocations s’étend à l’intérieur d’un grain (voir Figure I- 14 a). Par contre, Stroh [107] a démontré que si le mur est contraint de se diviser (voir Figure I- 14 b), la valeur de la contrainte entre les extrémités peut être suffisante pour créer une fissure d’une longueur limitée, se déplaçant normalement au mur de dislocations (voir Figure I- 14 c).
Figure I- 14 : Processus de nucléation d’une fissure normale à un mur de dislocations lorsque ce dernier est soumis
à une contrainte de cisaillement [107]. Schéma d’après [68].
4.2.2.- Le modèle de Barsoum : le concept d’IKB et la classe des
solides KNE
En 2003, Barsoum et al. sont les premiers à évoquer un modèle basé sur les « Incipients Kink Bands (IKBs) » pour expliquer le phénomène d’hystérèse. Le terme IKB est utilisé pour désigner un kink band (KB) dont les murs de dislocations restent attachés à ses extrémités, c'est-à-dire qu’il reste encore à l’état de lentille ou ellipse [3] (cf. voir la Figure I- 15 a)), jusqu’à une valeur critique de la contrainte de cisaillement τc. Un IKB est donc constitué de plusieurs
Chapitre I : ÉTAT DE L’ART
Page 24
Selon ces chercheurs [3], l’hystérèse observée à travers les courbes mécaniques de la phase MAX Ti3SiC2 peut s’expliquer par la nucléation des IKBs pendant la charge et leur annihilation pendant la décharge [3].
Ce modèle d’IKB [3], [66] est basé sur le modèle de Frank et Stroh [106]. En effet, ces derniers ont considéré une kink band elliptique instable de dimensions sous-critique 2β (petit axe) et 2α (grand axe) (voir Figure I- 15 a)) avec α > β.
Figure I- 15 : Nucléation d’une kink band stable d’après [66]. a) Schéma, en 3D, d’une kink band instable en
forme d’ellipse. b) Formation d’une « Incipient kink band (IKB) ». c) Courbe contrainte-déformation hystérétique. d) Une IKB dans un grain « dur » (grain rouge dans les parties d), e) et f)) entouré de grains « mous » (grains bleus dans les parties d, e et f). Les lignes dans les grains représentent les traces des plans de base. e) Murs de dislocations mobiles dans un gros grain. Les lignes en pointillés schématisent des murs qui se sont séparés de la source et s’éloignent de cette dernière (cf. partie b), cas possible seulement à haute température et/ou à des contraintes élevées. f) Schéma similaire à d), mais avec les murs de dislocations qui se sont tous regroupés dans les joints de kink [66].
la nucléation-croissance spontanée de celle-ci est possible lorsque la contrainte cisaillement τ ou la contrainte normale (axiale) σ dépasse une valeur critique notée τc ou σc [106] :
� > �$ ≈')( = )+,
-.(
/ 0- ln
+
3 .( éq.I.1
Avec G : module de cisaillement, α : demi-longueur du grand axe de l’ellipse, r : rayon de cœur de dislocation et est du même ordre de grandeur que le vecteur de Burgers b, γc : Angle critique
de kink donné par [106]:
�$ = +5≈6 6)7 1 − ν �;<$ éq.I.2
Avec D : distance entre boucle de dislocation le long de l’axe 2α, ν: coefficient de Poisson, τloc:
contrainte locale de cisaillement nécessaire pour former une boucle ou une paire de dislocations. Dans le cas des métaux τloc est de l’ordre de G/30. Par exemple, pour Ti3SiC2, γc = 0.07 et pour
Chapitre I : ÉTAT DE L’ART
Page 25
le graphite, γc = 0.065 [105]. D’après l’équation éq.I.1, plus � est petit (plus l’ellipse est petite),
plus la contrainte nécessaire à la nucléation du KB est grande. Il est à noter que 2α est plus ou moins la taille du grain mesurée perpendiculairement aux plans de base (cf. Figure I- 15 a)) [3].
Chacune des boucles de dislocations d’une IKB peut être considérée, en première approximation, comme une section d’un cylindre ayant 2β pour diamètre qui est déterminé par la relation [106] :
2� ≈ 7.)@
( 1 − ν � éq.I.3
Dans la formation d’une IKB, deux stades existent théoriquement : la nucléation (jusqu’à un diamètre de 2βc) et la croissance (à une valeur 2β > 2βc lorsque σ > σc) [84]. Mais le processus
de nucléation n’est pas bien compris. Parfois une faible pré-déformation plastique est exigée pour créer une IKB (cas du Zirconium, Magnésium...) [84], [87], parfois non (cas du Ti3AlC2, Ti2AlC...) [108][84], [87], [108]. Ainsi le modèle des IKBs se base uniquement sur le deuxième stade c’est-à-dire la croissance des IKBs. Dans ce modèle, il est supposé qu’une IKB de diamètre 2βc préexiste ou est nucléée pendant la pré-déformation [66].
Il est à noter que la nucléation-annihilation des IKBs durant un cycle charge-décharge est accompagnée d’une dissipation d’énergie. Cette dernière est due au va-et-vient des dislocations constituant les IKBs [92]. Barsoum et al. ont montré que, dans le cas de Ti3SiC2, pour un cycle charge-décharge allant jusqu’à 1 GPa, la courbe mécanique hystérétique obtenue est complètement réversible et est accompagnée d’une énergie dissipée wd (cf. Figure I- 15 c)),
pouvant atteindre environ 25 % de l’énergie mécanique totale (0.7 MJm-3) [3].
En se basant sur des essais mécaniques cyclés réalisés sur Ti3SiC2 en compression [3] et en nano-indentation [100], sur le graphite en nano-indentation et en compression [91] et sur le mica
[92], Barsoum et al. [92] ont conclu que les solides mécaniquement anisotropes ayant un rapport
c/a élevé se déforment toujours par formation de kinks (coudes) i.e. par la formation des kink
bands (KBs) pourvu qu’il ne produise pas de maclage. Un rapport c/a élevé est une condition suffisante mais non nécessaire pour que le matériau se déforme par la formation des kink bands
[92]. Ces matériaux, par leurs modes de déformation et la forme de leurs courbes mécaniques, ont été classés, par ces auteurs, dans une classe de matériaux appelée : « Kinking Nonlinear Elastic (KNE) Solids » [92]. Les solides KNE incluent ainsi les nitrures et les carbures ternaires lamellaires telles phases MAX en général [3], [16], [100], mais aussi la glace [109], le saphir
[90], les oxydes lamellaires et les semi-conducteurs [92].
Il faut garder à l’idée que selon ces travaux [3], [91], [92], [100], les IKBs précèdent toujours les KBs. Cela implique que tous les solides KNE peuvent montrer un comportement hystérétique, à travers leurs courbes mécaniques, basé sur la nucléation-annihilation des IKBs lorsque ceux-ci sont soumis à des solliceux-citations mécaniques cyclées.
Un rapport c/a ≥ 1.4, est la condition suffisante pour qu’un matériau soit classé comme solide KNE. Mais si le rapport c/a n’est pas élevé, alors la valeur du module indépendant d’élasticité
Chapitre I : ÉTAT DE L’ART
Page 26
C44 d’un solide doit être faible pour que les conditions d’appartenance aux solides KNE soient
respectées (voir la Figure I- 15 a)) [105], [110] (les matériaux hexagonaux, comme les phases MAX par exemple, ont 5 modules indépendant d’élasticité C11, C12, C13, C33 et C44). En d’autres termes, un rapport c/a élevé (i.e. c/a ≥ 1.4) et/ou la valeur C44 faible est/sont la/les condition(s)
requise(s) pour observer des cycles d’hystérésis réversibles au travers de la réponse mécanique des matériaux sollicités.
Ces cycles d’hystérésis se classent en général en deux types : Le type I (voir Figure I- 16 a)) est attribué aux matériaux KNE dont toutes les réponses mécaniques hystérétiques sont complètement réversibles sans aucune déformation permanente et le type II (voir Figure I- 16 b)) attribué à ceux dont la première courbe hystérétique entraine une certaine déformation résiduelle et les suivantes sont complètement réversibles. C’est le cas du graphite, du nitrure de Bore hexagonal (h-BN), par exemple [105].
Figure I- 16 : a) Courbes hystérétiques de type I obtenues après compression d’un échantillon polycristallin de
Ti3SiC2 [105]. b) Courbes hystérétiques de type II obtenues après compression d’un échantillon de graphique polycristallin [105]. c) Évolution du coefficient d’élasticité C44 en fonction du rapport c/a pour certains matériaux. Tous les solides à droite du quotient c/a = 1,4 sont des solides KNE car ils sont plastiquement anisotropes. L’astérisque indique un comportement type II à la température ambiante pour un matériau polycristallin. Les croix indiquent un comportement de type II, mais seulement sous un nanoindenteur [110].
Le comportement mécanique d’un solide KNE est modélisé par la courbe de la Figure I- 17 [31] : les différentes parties sont identifiées à partir de 4 paramètres liés entre eux qui sont la contrainte appliquée σ, la déformation non-linéaire ɛNL, l’énergie non-linéaire par unité de
![Tableau 1-I : Tableau périodique des phases MAX avec les différents éléments mis en jeu [17]](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/13.892.108.788.657.932/tableau-tableau-périodique-phases-max-éléments-mis-jeu.webp)
![Figure I- 11 : Ténacité en fonction de la température pour plusieurs phases MAX d’après Wan et al [77]](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/25.892.109.785.110.346/figure-ténacité-fonction-température-phases-max-wan-al.webp)
![Figure I- 13 : Processus de formation des kink bands selon le modèle de Frank et Stroh [106]](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/31.892.120.786.558.853/figure-processus-formation-kink-bands-modèle-frank-stroh.webp)
![Figure I- 14 : Processus de nucléation d’une fissure normale à un mur de dislocations lorsque ce dernier est soumis à une contrainte de cisaillement [107]](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/32.892.115.622.466.773/figure-processus-nucléation-fissure-normale-dislocations-contrainte-cisaillement.webp)
![Figure I- 15 : Nucléation d’une kink band stable d’après [66]. a) Schéma, en 3D, d’une kink band instable en forme d’ellipse](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/33.892.116.627.280.638/figure-nucléation-kink-stable-schéma-instable-forme-ellipse.webp)
![Figure I- 23 : cette figure est extraite de la référence [116]. Une cartographique des facteurs de Schmid de la surface de l’échantillon déformé par compression deux fois cyclées (contrainte maximale 500 MPa) a été effectuée](https://thumb-eu.123doks.com/thumbv2/123doknet/7890541.264205/48.892.109.784.179.549/extraite-référence-cartographique-échantillon-déformé-compression-contrainte-effectuée.webp)