HAL Id: tel-01697648
https://tel.archives-ouvertes.fr/tel-01697648
Submitted on 18 Apr 2018HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Techniques de calcul de gradient aéro-structure
haute-fidélité pour l’optimisation de voilures flexibles
Timothée Achard
To cite this version:
Timothée Achard. Techniques de calcul de gradient aéro-structure haute-fidélité pour l’optimisation de voilures flexibles. Génie civil. Conservatoire national des arts et metiers - CNAM, 2017. Français. �NNT : 2017CNAM1140�. �tel-01697648�
École doctorale Sciences des Métiers de l’Ingénieur (Paris)
Laboratoire de Mécanique des Structures et des Systèmes Couplés
THÈSE DE DOCTORAT
présentée par :
Timothée ACHARD
soutenue le :8 décembre 2017
pour obtenir le grade de : Docteur du Conservatoire National des Arts et Métiers
Discipline : Mécanique, génie mécanique, génie civil / Spécialité : Mécanique
Techniques de calcul de gradient aéro-structure
haute-fidélité pour l’optimisation de voilures flexibles
THÈSE dirigée par
M. OHAYON Roger Professeur émérite, CNAM de Paris
RAPPORTEURS
M. DESIDERI Jean-Antoine Directeur de Recherche, INRIA Sophia Antipolis
M. MORLIER Joseph Professeur, ISAE-SUPAERO
PRÉSIDENT
M. DUYSINX Pierre Professeur, Université de Liège
EXAMINATEURS
M. CHASSAING Jean-Camille Maître de Conférences, Université Pierre et Marie Curie
M. BLONDEAU Christophe Encadrant, Ingénieur de Recherche, ONERA
INVITE
Résumé
L’optimisation multidisciplinaire (MDO) à base de gradients est efficace et très utili-sée pour le dimensionnement structural d’ailes flexibles. Cependant, dans le contexte de simulations numériques haute-fidélité, le calcul efficace des gradients reste un défi majeur. L’objectif de ce travail est d’étudier les approches les mieux adaptées aux spécificités du calcul de sensibilité des efforts aéroélastiques par rapport à des paramètres structuraux. Deux techniques de calcul de gradient haute-fidélité adaptées aux systèmes aéroélastiques fortement couplés sont proposées. La technique la plus intrusive repose sur les formula-tions directe et adjointe qui nécessitent un effort d’implémentation logicielle substantiel. Alternativement, nous proposons une approche découplée et non-intrusive, moins lourde à implémenter et cependant capable de fournir une approximation précise des gradients. Ces deux techniques ont été intégrées dans le logiciel CFD elsA de l’ONERA. La précision, l’efficience et l’applicabilité de ces méthodes sont démontrées sur le cas-test avion de transport civil Common Research Model (CRM). Nous résolvons un problème inverse dont l’objectif est de retrouver, en conditions de vol de croisière, une loi cible de vrillage voilure. Ces deux méthodes s’avèrent comparables en matière de précision et de coût. Elles offrent ainsi une souplesse supplémentaire de mise en œuvre en fonction du niveau d’intégration recherché dans le processus MDO.
Abstract
To improve the structural design of flexible wings, gradient based Multidisciplinary Design Optimization (MDO) techniques are effective and widely used. However, gradients calculation is not trivial and can be costly when high-fidelity models are considered. Our objective is to study different suitable approaches to compute gradients of aeroelastic loads with respect to structural design parameters. To this end, two high-fidelity aero-structure gradient computation techniques for strongly coupled aeroelastic systems are proposed. The most intrusive technique includes the well-established direct and adjoint formulations that require substantial implementation effort. In contrast, we propose an alternative uncoupled non-intrusive approach easier to implement and yet capable of providing accurate gradients approximations. Both techniques have been implemented in the ONERA elsA CFD software. Accuracy, efficiency and applicability of these methods are demonstrated on the civil transport aircraft Common Research Model (CRM) test-case. More specifically, an inverse design problem is set up with the objective of matching an in-flight target twist law distribution. These two methods prove to be comparable in terms of accuracy and cost. Thus they offer additional operational flexibility depending on the level of integration sought in the MDO process.
Remerciements
Pour commencer, j’adresse mes remerciements à Laurent Mouchette, mon ancien mana-ger, qui m’a soutenu dans ma démarche d’entreprendre une thèse. Puis, je voudrais remercier –une fois de plus- David Mas, qui depuis des années m’accompagne professionnellement.
Merci pour tout, David. Je remercie mon directeur de thèse, Roger Ohayon, qui m’a fait confiance et m’a laissé une grande liberté au cours de la thèse. J’adresse mes remerciements les plus chaleureux à Christophe Blondeau, qui m’a encadré avec patience, rigueur et détermination, et s’est montré très disponible tout au long de la thèse. Je remercie chacun des membres du jury d’avoir accepté d’évaluer mon travail de thèse. En particulier, je remercie Messieurs Désidéri et Morlier pour avoir rapporté mon travail, pour leurs lectures détaillées et leurs remarques pertinentes.
J’ai effectué mon travail de thèse à l’ONERA, au centre de Châtillon, dans de très bonnes conditions. Je remercie Philippe Girodroux-Lavigne puis Alain Dugeai de m’avoir accueilli au sein de l’unité MSAE. Mes collègues de l’unité se sont toujours montrés disponibles et m’ont aidé avec efficacité chaque fois que j’en ai eu besoin, c’est pourquoi je remercie chaleureusement l’ensemble de l’équipe. Plus spécifiquement, merci à Cédric et Fabien pour leur grande disponibilité et leur soutien.
Chaque jour passé à l’Office n’aurait pas été le même sans Tito, toujours disponible, de bonne humeur, et qui m’a aidé dans les moments plus difficiles de la thèse. Merci Tito pour tout cela. Je remercie également tous les (post-) doctorants et stagiaires rencontrés au cours de ces trois années qui ont rendu les choses plus légères et agréables. Je souhaite remercier Nadine, qui a toujours trouvé des solutions efficaces à chaque problème administratif ou matériel rencontré au cours de ma thèse.
REMERCIEMENTS
Je remercie mes proches, amis, famille, qui m’ont aidé et conforté d’abord à faire ce choix de commencer une thèse, puis de la continuer, et enfin de la terminer. Je pense en particulier à Mathilde.
Table des matières
Introduction 27
1 Présentation de l’état de l’art 33
1.1 Contexte général de l’optimisation aéro-structure en aéronautique . . . 33
1.1.1 Aeroelastic Tailoring . . . 33
1.1.2 Optimisation intégrée . . . 34
1.1.3 Optimisation globale / optimisation locale . . . 35
1.2 Le calcul des gradients . . . 36
1.2.1 Méthodes des Différences Finies et Complex Step . . . 36
1.2.2 Méthode directe (ou tangente) . . . 38
1.2.3 Méthode adjointe . . . 38
1.2.4 Différentiation automatique . . . 39
1.2.5 Calcul des gradients dans le cadre d’une optimisation structure . . . 40
1.2.6 Calcul des gradients dans le cadre d’une optimisation aéro-structure 41 1.2.7 Stratégie de traitement de la déformation du maillage . . . 41
1.2.8 Stratégies de résolution de systèmes couplés aéro-structure haute-fidélité 42 1.3 L’optimisation aéro-structure à l’ONERA . . . 45
2 Calcul de l’équilibre statique du système aéroélastique 53 2.1 Introduction . . . 53
TABLE DES MATIÈRES
2.2 Fonctionnement général du module aéroélastique elsA/Ael . . . 54
2.3 Présentation du modèle fluide . . . 56
2.3.1 Écriture des équations de la mécanique des fluides . . . 56
2.3.2 Équations de Navier-Stokes moyennées (RANS) . . . 61
2.3.3 Méthode des volumes finis . . . 63
2.3.4 Formulation ALE -Arbitrary Lagrangian Eulerian- . . . . 65
2.3.5 Discrétisation en espace . . . 66
2.3.6 Intégration temporelle . . . 71
2.3.7 Accélération de la convergence . . . 75
2.3.8 Conditions aux limites . . . 77
2.4 Présentation du modèle structure . . . 78
2.4.1 Problème d’interaction fluide structure . . . 79
2.4.2 Approche matrice de flexibilité . . . 79
2.5 Présentation des techniques de couplage . . . 81
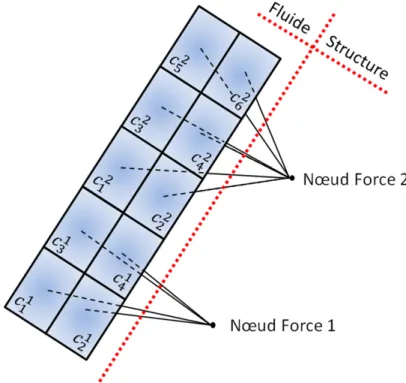
2.5.1 Transfert des forces aérodynamiques sur la structure . . . 81
2.5.2 Transfert des déplacements structuraux vers l’interface aéroélastique 84 2.5.3 Propagation des déplacements des cellules de l’interface aéroélastique au reste du maillage fluide . . . 90
2.6 Cas-test de l’Aile M6 . . . 93
2.7 Cas-test du Common Research Model (CRM) . . . 96
2.7.1 Modèle fluide . . . 97
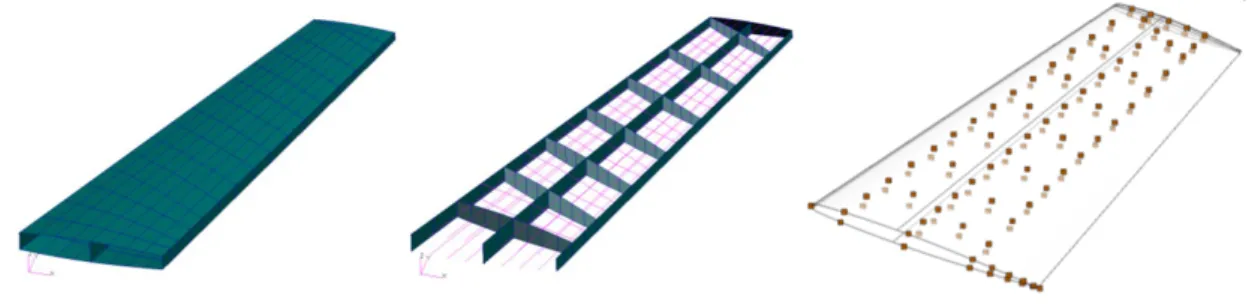
2.7.2 Modèle éléments finis (MEF) . . . 98
2.7.3 Procédure inverse pour déterminer la forme bâti du CRM . . . 101
2.8 Conclusions du chapitre . . . 105
TABLE DES MATIÈRES
méthodes directe et adjointe 107
3.1 Introduction . . . 107
3.2 Sensibilité des équations aux dérivées partielles discrétisées pour un système quelconque . . . 108
3.2.1 Approche directe . . . 109
3.2.2 Approche adjointe . . . 110
3.3 Sensibilité des équations aux dérivées partielles discrétisées pour un système couplé aéro-structure . . . 111
3.3.1 Approche directe . . . 112
3.3.2 Approche adjointe . . . 119
3.4 Cas particulier du calcul du gradient d’une fonction objectif aéroélastique par rapport à un paramètre affectant la forme aérodynamique . . . 123
3.5 Cas particulier du calcul du gradient d’une fonction objectif aéroélastique par rapport à un paramètre affectant la rigidité de la structure . . . 124
3.6 Approche adjointe pour le cas particulier du calcul du gradient d’une contrainte structure dans un élément fini par rapport à un paramètre affec-tant la rigidité de la structure . . . 126
3.7 Principe de dualité . . . 130
3.7.1 Validation du code adjoint par des tests de dualité . . . 132
3.8 Calcul des gradients par différences finies . . . 134
3.9 Cas-test de l’Aile M6 . . . 136
3.10 Cas-test du CRM . . . 138
3.11 Conclusions du chapitre . . . 140
4 Développement d’une méthode non-intrusive de calcul de gradient aéro-structure 143 4.1 Introduction . . . 143
TABLE DES MATIÈRES
4.2 Réutilisation du solveur linéarisé . . . 145
4.3 Reconstruction modale à partir de la configuration aéroélastique . . . 147
4.3.1 Calcul de la distance entre sous-espaces vectoriels de même dimension152 4.3.2 Stratégie pour une optimisation utilisant la méthode non-intrusive . 155 4.4 Cas-test de l’Aile M6 . . . 156
4.4.1 Construction de la base modale . . . 157
4.4.2 Calcul de la distance de Grassmann . . . 160
4.4.3 Résultats . . . 161
4.5 Cas-test de la configuration CRM . . . 166
4.5.1 Construction de la base modale . . . 167
4.5.2 Calcul de la distance de Grassmann . . . 169
4.5.3 Résultats . . . 170
4.5.4 Vérification des critères de troncature modale et de validation croisée 173 4.6 Conclusions du chapitre . . . 175
5 Dimensionnement de la structure d’une aile d’avion à l’aide de gradients aéro-structure haute-fidélité 179 5.1 Introduction . . . 179
5.2 Méthode d’approximation des forces . . . 180
5.3 Stratégie proposée pour un dimensionnement structure efficace . . . 181
5.4 Résultats . . . 185
5.4.1 Charges mises à jour, approximation d’ordre 0 . . . 185
5.4.2 Charges et gradients mis à jour, méthode intrusive . . . 187
5.4.3 Charges et gradients remis à jour, approches intrusive et non-intrusive187 5.4.4 Piste d’amélioration du processus avec la méthode non-intrusive . . 188
TABLE DES MATIÈRES
Conclusion 191
A Détail du calcul des efforts visqueux s’appliquant sur une paroi 195
B Etude des coefficients de relaxation du système couplé et du CFL 199
C Approche non-intrusive et théorie de l’aérodynamique linéarisée en
fré-quence 203
C.1 Équations discrétisées puis linéarisées en maillage mobile . . . 204
C.2 Formulation simplifiée des équations discrétisées linéarisées en fréquence . . 206
D Gradient de la base modale par rapport aux paramètres structuraux 211 D.1 Méthode de superposition modale . . . 211
D.2 Méthode de Nelson . . . 212
D.3 Méthode modale itérative . . . 214
D.4 Méthodes approximées améliorées . . . 214
Bibliographie 217
Liste des tableaux
2.1 Distribution des masses de la configuration CRM . . . 100
3.1 Gradients des coefficients de portance et de trainée par rapport à p1 et p2. Cas-test Euler . . . 137 3.2 Gradients des coefficients de portance par rapport aux épaisseurs de la peau
intrados. . . 140 3.3 Gradients des coefficients de trainée par rapport aux épaisseurs de la peau
intrados. . . 141
4.1 Gradients des coefficients de portance et de trainée par rapport à l’épaisseur des peaux et des longerons. Cas-test de l’aile M6. . . 162 4.2 Neuf premiers modes propres. . . 167 4.3 Gradients des coefficients de portance par rapport à l’épaisseur des peaux.
Cas-test du CRM. . . 172 4.4 Gradients des coefficients de trainée par rapport à l’épaisseur des peaux.
Table des figures
1.1 Erreur relative des sensibilités calculées par différences finies et par la
méthode de la complex-step [Martins et al. 2003]. . . . 37
1.2 Performance de calcul des méthodes STG et SNK pour les configurations "stiff" et "soft" [Barcelos et al. 2006]. . . 44
1.3 Comparaison du coût moyen total par itération d’optimisation des méthodes STG et SNK au cours du processus d’optimisation [Barcelos et al. 2006]. . 45
1.4 Organisation du projet ARTEMIS [Blondeau et Salah El Din 2012]. . . 47
1.5 Décomposition BLISS dans le projet ARTEMIS [Blondeau et Salah El Din 2012]. . . 49
1.6 Brique structurale dans le projet ARTEMIS [Blondeau et Salah El Din 2012]. 51 2.1 Organisation du module aéroélastique. . . 55
2.2 Illustration d’une discrétisation spatiale unidimensionnelle. . . 67
2.3 Conditions initiales du problème de Riemann. . . 69
2.4 Multigrille à trois niveaux - cycle en V. . . 76
2.5 Schéma explicitant les associations cellules/nœuds utilisées pour le transfert des efforts aérodynamiques vers la structure. . . 83
2.6 Maillage Euler de l’aile M6. . . 94
2.7 Maillage structure de l’aile M6 et nœuds déplacements/forces sélectionnés pour la construction de la matrice de flexibilité. . . 94
TABLE DES FIGURES
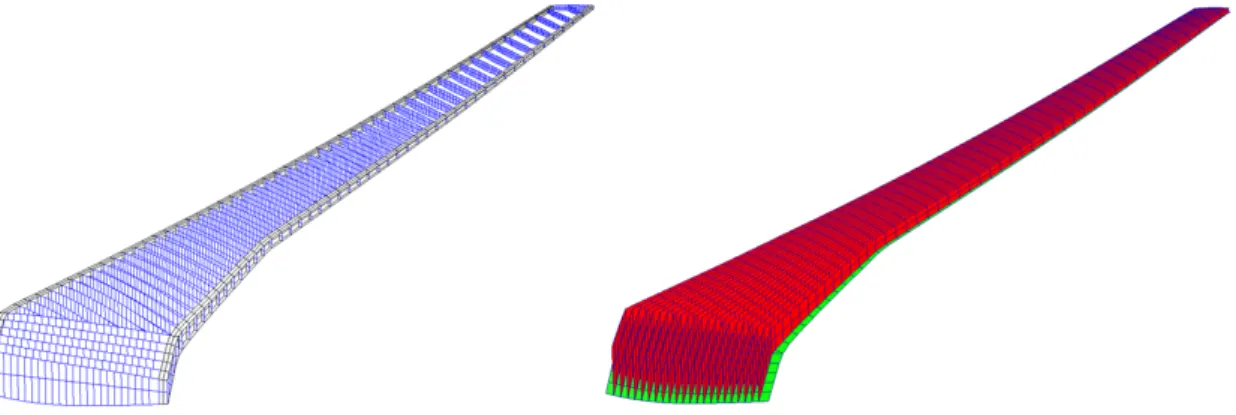
2.8 Forme de l’aile à l’équilibre aéroélastique, colorée par le coefficient de pression (à gauche). Historique de la convergence de la norme du résidu en densité
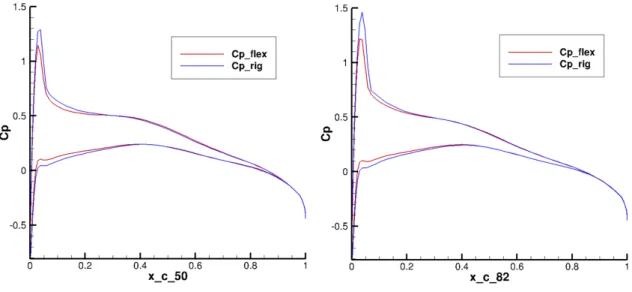
pour le calcul aéroélastique (à droite). Cas-test Euler. . . 95 2.9 Comparaison entre les distributions de Cp rigide et flexible à y=50% et
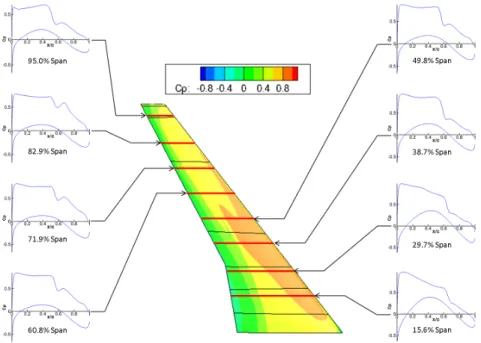
y=82% de l’envergure. Cas-test Euler. . . 95 2.10 Configuration WBH colorée par le coefficient de pression à M=0.85 . . . 98 2.11 Tranche de coefficients de pression sur l’aile à M=0.85. . . 98 2.12 MEF V14 de l’aile du CRM. A gauche : longerons et nervures, à droite :
raidisseurs et peau intrados. . . 99 2.13 Répartition des nœuds déplacement (en vert) et nœuds force (en rouge) pour
la construction de la matrice de flexibilité. . . 100 2.14 Charges inertielles (à gauche) et charges cumulées aérodynamiques et
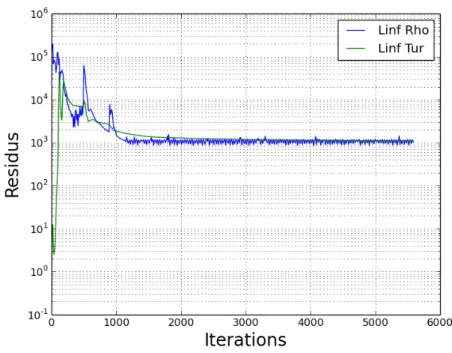
iner-tielles (à droite) intégrées le long de l’axe aérodynamique Y. . . 101 2.15 Représentation schématique de la procédure inverse. . . 103 2.16 Superposition des formes aérodynamique vol et bâti . . . 103 2.17 Historique de la convergence de la norme du résidu en densité et en viscosité
turbulente pour le calcul aéroélastique. . . 104 2.18 Superposition des lois de vrillage d’origine, bâti, et recalculée par analyse
aéroélastique . . . 105 2.19 Superposition des coordonnées en z sur une ligne de nœuds le long de
l’en-vergure pour les formes d’origine, bâti, et recalculée par analyse aéroélastique.105 2.20 Différences ∆zrigide= zvol rigide− zbati et ∆zael= zvol ael− zbati tracées sur
une ligne de nœuds le long de l’envergure. . . 106
3.1 Définition du maillage de référence Xa0, du maillage structure Xs et du maillage vol Xa. . . 112
TABLE DES FIGURES
3.2 Etude de pas sur les gradients adimensionnés des coefficients de portance et de trainée par rapport à p1, intégrés sur l’aile. Courbe bleue : différences finies centrées. Courbe rouge : différences finies décentrées. . . 135 3.3 Paramètres structuraux de conception. . . 136 3.4 Convergence des résidus en densité pour les deux paramètres. Cas-test Euler.137 3.5 MEF coloré par groupe d’optimisation structure, représenté avec la peau
aérodynamique du CRM. . . 138 3.6 Cinq premiers paramètres d’optimisation. . . 139 3.7 Convergence des résidus en densité pour les cinq paramètres (gauche) et
résidus adjoints pour les deux fonctions objectif (droite). . . 139
4.1 Diagramme de l’approche non-intrusive aboutissant au calcul du gradient des charges aéroélastiques Qs par rapport à un paramètre structural p. . . . 151
4.2 Courbe bleue : norme de l’erreur de projection ||Ures||K en fonction du
nombre de modes retenus. Marqueurs rouges : coordonnées généralisées qstru correspondant à chacun des modes. . . 158 4.3 Visualisation des modes lissés retenus pour la reconstruction des déplacements.159 4.4 Validation croisée de la base modale de projection (en bleu). La norme de
Urescalculée en prenant les 6 modes est tracée en rouge. . . 161
4.5 Synthèse du coût de calcul des différentes méthodes de calcul de gradient. . 163 4.6 Gradients des efforts transverse par rapport à p1, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 164 4.7 Gradients des efforts transverse par rapport à p2, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 165
TABLE DES FIGURES
4.8 Gradients des moments de torsion par rapport à p1, calculés avec l’approche non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 165 4.9 Gradients des moments de torsion par rapport à p2, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 166 4.10 Neuf premiers modes propres structuraux lissés sur l’interface aéroélastique. 168 4.11 Norme < Ures, Ures>K par rapport au nombre de modes retenus. La ligne
rouge pointillée représente le critère de troncature de la base modale. . . 169 4.12 Méthode du Leave-one-out appliquée sur la base modale tronquée. . . 170 4.13 Distances de Grassmann relatives pour les cinq paramètres structuraux
considérés. . . 171 4.14 Gradients des efforts horizontaux par rapport à p1, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 173 4.15 Gradients des efforts horizontaux par rapport à p4, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 174 4.16 Gradients des efforts transverses par rapport à p1, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 174 4.17 Gradients des efforts transverses par rapport à p4, calculés avec l’approche
non-intrusive (barres vertes et grises). Les valeurs de l’approche tangente (référence) sont fournies (marqueurs rouges). . . 175 4.18 Gradients des efforts transverses par rapport à p2, calculés avec l’approche
non-intrusive avec 1, 8 et 20 modes (barres bleues, vertes, et marqueurs oranges). Les valeurs de l’approche tangente (référence) sont fournies (mar-queurs rouges). . . 175
TABLE DES FIGURES
5.1 Gauche : forme bâti et forme vol cible. Droite : lois de vrillage initiale et cible.182 5.2 Paramètres structuraux utilisés pour dimensionner la structure. . . 182 5.3 Stratégie d’optimisation structure. . . 184 5.4 Comparaison des distribution d’épaisseurs optimales pour les trois stratégies
de sensibilité des charges. Ligne noire pointillée : valeurs initiales, ligne rouge continue : valeurs cibles. . . 186 5.5 Historique de convergence des fonctions objectif. . . 186
B.1 Convergence de dCl/dp1 en fonction des coefficients de relaxation. Cas-test Euler. . . 200 B.2 Convergence de dCl/dp1 en fonction des coefficients de relaxation. Cas-test
Euler. . . 201 B.3 Convergence de dCl/dp1 en fonction du CFL. Cas-test Euler. . . 202
Liste des symboles
α Angle d’incidence de l’aile
τ Tenseur des contraintes de cisaillement
τR Tenseur de Reynolds
Γ Frontière entre deux cellules
λ Valeur propre
Φ Matrice des modes propres F Vecteur des flux physiques
p Vecteur des paramètres d’optimisation q Vecteur du flux de chaleur
Qs, Qa Vecteur des forces structurales et aérodynamiques
QS, QV Vecteurs des termes sources surfaciques et volumiques
qt Vecteur du flux de chaleur turbulent
R Système d’équations discrètes écrites sous forme de résidu Ra Système d’équations discrètes fluide écrites sous forme de résidu Rs Système d’équations discrètes structure écrites sous forme de résidu
U Vecteur des déplacements structuraux V Vecteur vitesse
TABLE DES FIGURES
Wb Vecteur des variables conservatives calculées à la paroi
Xa Maillage aérodynamique Xs Maillage structure
D Domaine déformable
µ Viscosité dynamique
∇.G Divergence du champ vectoriel G ∇g Gradient du champ scalaire g Ω Cellule d’un maillage fluide
ρ Masse volumique
ρ(A) rayon spectral de la matrice A Σ Surface fermée du domaine D
c Vitesse du son
cp Capacité calorifique à pression constante
cv Capacité calorifique à volume constant
E Énergie totale
e Énergie interne
H Enthalpie totale
J Fonction objectif scalaire à optimiser
k Énergie cinétique de la turbulence
kt Conductivité thermique
M Nombre de Mach
p Pression
r Rapport de la constante des gaz parfaits
TABLE DES FIGURES
t Temps
Introduction
En aéronautique, les avionneurs recherchent à minimiser le coût d’exploitation des avions tout en faisant face à des réglementations environnementales de plus en plus contraignantes. Le partenariat Clean Sky 2 entre la Commission Européenne et l’industrie aéronautique européenne vise notamment, pour 2050, à construire des avions dont les émissions de CO2 auront été réduites de 75%, de NOX de 90%, et dont la pollution sonore aura été diminuée de 65% par rapport aux avions construits en 2000 [ACARE 2011]. Un excellent moyen de répondre à ces exigences consiste à réduire la consommation de carburant par trajet par passager. Cet objectif global dépend de nombreuses disciplines, par exemple l’efficacité des moteurs, la performance aérodynamique de l’avion, sa masse totale, etc... Historiquement, chacune a été traitée indépendamment des autres. En réalité, ces disciplines interagissent, ce qui impacte directement l’objectif global. La prise en compte de ces interactions disciplinaires est donc essentielle lors de la conception d’un avion.
Dans ces travaux, on se limite à deux disciplines : l’aérodynamique et la structure. Une réponse appropriée à l’objectif de réduire la consommation par voyageur-kilomètre est l’optimisation numérique conjointe de la forme aérodynamique et de la structure de l’avion, de manière à minimiser à la fois sa trainée et sa masse : on rentre dans le domaine de l’optimisation multidisciplinaire. Deux grands types d’optimisation existent : l’optimisation globale et l’optimisation locale. L’optimisation globale est utilisée pour trouver la meilleure configuration dans tout le domaine de recherche formé par les paramètres de l’optimisation. En pratique, cette stratégie est coûteuse en temps de calcul si la nature des modèles est de haute-fidélité et que de nombreux paramètres d’optimisation sont considérés. Elle est adaptée pour l’optimisation conceptuelle, avec peu de variables d’optimisation et des modèles basse-fidélité. En revanche, pour l’optimisation préliminaire de design avec des
INTRODUCTION
modèles haute-fidélité, l’optimisation locale est plus appropriée car elle constitue un bon compromis entre coût de calcul et précision sur l’optimum atteint. Ce type d’optimisation repose fréquemment sur le calcul des gradients des réponses du système par rapport aux paramètres d’optimisation. Ces gradients fournissent la direction de recherche d’un optimum local. Cependant, le calcul de ces gradients n’est pas trivial, et devient coûteux lorsque des modèles fluide et structure haute-fidélité sont utilisés. Pour diminuer ce coût, une pratique courante dans l’industrie en études préliminaires de design consiste à utiliser des modèles basse-fidélité pour l’optimisation (généralement monodisciplinaire), combinés au savoir-faire des avionneurs et à des règles métier. Cette stratégie fortement basée sur l’expérience est efficiente et relève de la culture d’entreprise des avionneurs. Cependant, afin d’identifier au plus tôt les configurations les plus intéressantes, l’optimisation numérique multidisciplinaire haute-fidélité doit être introduite dès la phase préliminaire de design. Cela nécessiterait toutefois une harmonisation des pratiques en entreprise. Il s’agit d’une évolution souhaitable pour au moins deux raisons supplémentaires. D’une part, la tendance actuelle à augmenter la part des matériaux composites dans les structures d’avions (plus de 50% pour l’A350 XWB) notamment afin de réduire leur masse, augmente significativement la souplesse des ailes [Weisshaarr 1980], rendant la prise en compte des interactions fluide-structure dans la simulation numérique indispensable. Ces interactions sont correctement prédites si les modèles utilisés sont suffisamment fins. D’autre part, avec l’augmentation de la puissance de calcul disponible, il est désormais possible de modéliser et de simuler précisément l’écoulement fluide autour d’un avion, en tenant compte de ces interactions : on parle du domaine de l’aéroélasticité. Dans ce cas, la prédiction des efforts critiques dimensionnants pour la structure fait appel à des calculs aéroélastiques, couplant des simulations numériques CFD (Computational Fluid Dynamics) et CSM (Computational
Structural Mechanics). Traditionnellement, la partie élastique de ces efforts, c’est-à-dire la
partie dépendant des déplacements de la structure, est considérée comme une correction des efforts aérodynamiques rigides. Cette approche se justifie dans la conception de voilures métalliques (typiquement en alliage d’aluminium) mais ne permet pas de tirer parti des opportunités de conception apportées par les matériaux composites.
INTRODUCTION
robustes pour être utilisés dans un contexte industriel. Cependant, l’obtention numérique du gradient des efforts aéroélastiques par rapport aux variables de dimensionnement structure (typiquement épaisseurs, sections, moments quadratiques ...) fait encore l’objet de travaux de recherche. Le potentiel de l’optimisation aéro-structure est ainsi inexploité, du fait de la difficulté à calculer des gradients précis sur des modèles haute-fidélité dans un temps raisonnable.
Pour pallier cette difficulté, [Maute et al.] ont développé en 2001 un module de calcul de gradients aéroélastiques haute-fidélité basé sur une méthode de linéarisation directe. L’intérêt de cette stratégie est qu’elle rend le système indépendant du nombre de fonctions objectif, mais dépendant du nombre de paramètres d’optimisation. Cela leur a permis de réaliser une optimisation aéroélastique sur un modèle d’avion réaliste, mais limité en ce qui concerne le paramétrage, donc la finesse d’optimisation.
[Kenway et al.] ont implémenté en 2014 un module de calcul de gradients aéro-structure haute-fidélité utilisant la méthode adjointe. La formulation des équations adjointes rend le système indépendant du nombre de paramètres d’optimisation. Ce module leur a ensuite servi lors de l’optimisation fine d’un modèle d’avion réaliste ([Kenway et Martins 2014]). Cependant, le coût du calcul des gradients avec la méthode adjointe est indexé sur le nombre de réponses du système. Pour conserver un temps de calcul acceptable lors de l’optimisation aéro-structure avec des milliers de contraintes, il leur a été nécessaire de recourir à une technique classique d’agrégation de contraintes calculant une enveloppe conservative de ces contraintes et qui peut dégrader la précision de l’optimum trouvé [Poon et Martins 2007].
Des travaux récents ont été menés à l’ONERA sur les techniques de calcul de gradient aéro-structure par la méthode de l’état adjoint discret ainsi que des applications à l’op-timisation d’une voilure réaliste d’avion civil ([Ghazlane et al. 2012],[Viti et al. 2016]). Ces travaux reposent cependant sur une modélisation idéalisée de la structure sous la forme d’une poutre équivalente. Bien qu’utile pour des études préliminaires de design ou d’exploration de l’espace de design, cette modélisation structure ne peut réaliser de couplages aéroélastiques complexes, ni prendre en compte des structures composites, et reste limitée à des ailes à fort allongement.
INTRODUCTION
Ainsi, plusieurs auteurs ou institutions ont développé leur propre module de calcul de gradients aéro-structure, et de plus en plus l’accent est mis sur la haute-fidélité afin de représenter correctement les phénomènes physique en jeu. Leurs études se basent pour la plupart sur la méthode adjointe. Cependant, la complexité liée à l’implémentation de ce type de méthode, couplée à une modélisation fine du système aéroélastique rend le développement d’un module de calcul de gradients aéro-structure haute-fidélité non trivial. De plus, la difficulté augmente lorsque les dérivées croisées sont considérées, par exemple le calcul du gradient des charges aéroélastiques par rapport aux variables de dimensionnement structure. Enfin, un modèle d’optimisation aéro-structure comporte généralement plusieurs centaines de fonctions objectif, et plusieurs milliers de paramètres d’optimisation, ce qui rend difficilement utilisable la méthode adjointe sans faire appel à certains artifices, tel que l’agrégation de contraintes, diminuant la qualité de l’optimum calculé.
C’est ce qui justifie ce travail de thèse. Il consiste à étudier les approches les mieux adaptées au calcul de gradients aéro-structure haute-fidélité pour l’optimisation de voilures flexibles.
Le Chapitre 1 présente le contexte de l’optimisation aéro-structure en aéronautique et en particulier le calcul des gradients. Les avancées réalisées à l’ONERA dans ces domaines sont également détaillées. Ce travail de thèse est positionné dans ce contexte et avec les précédents travaux effectués à l’ONERA.
Le Chapitre 2 est dédié au calcul de l’équilibre statique de systèmes aéroélastiques. Tout d’abord, les modèles fluide et structure utilisés sont présentés. Le fluide repose sur les modèles Euler ou RANS, et la structure sur une modélisation éléments finis tridimensionnelle. Puis, on détaille les méthodes de couplage utilisées qui assurent le transfert des efforts et des déplacements entre les modèles fluide-structure. Enfin, deux modèles d’ailes d’avion de complexité croissante sont considérés. Sur chacun d’eux, l’équilibre statique du système aéroélastique est calculé.
Dans le Chapitre 3, on présente les développements effectués pour le calcul des gradients aéro-structure par méthodes tangente et adjointe. Ces développements ont pour base le module elsA/Aoc. A l’origine, ce module était prévu pour prendre en compte la flexibilité dans le calcul du gradient de critères de performance aérodynamiques par rapport à des
INTRODUCTION
paramètres aérodynamiques de forme. L’extension présentée dans ce chapitre permet de considérer également des paramètres impactant la rigidité de la structure. On détaille les tests de différences finies et de dualité réalisés pour vérifier que ce nouveau module résout correctement les systèmes tangent et adjoint. Enfin, des gradients aéro-structure sont calculés sur les modèles d’ailes d’avions utilisés dans le Chapitre 2.
Ces deux méthodes trouvent leurs limites pour les optimisations considérant simultané-ment de nombreuses fonctions objectif et de nombreux paramètres d’optimisation, ce qui est typiquement le cas pour les modèles d’optimisation aéro-structure. Dans ce contexte, on propose dans le Chapitre 4 une méthode de calcul de gradient de fonctions aérodynamiques flexibles par rapport à des paramètres structuraux, qui est indépendante du nombre de fonctions objectif et potentiellement indépendante du nombre de paramètres d’optimisation structure. Cette méthode est dite non-intrusive car elle nécessite un effort d’implémentation limité, et a pour caractéristique notable de découpler la partie du calcul inhérente au fluide de celle inhérente à la structure. L’intérêt de cette méthode est qu’elle réutilise les solveurs de type aérodynamique linéarisée rigide. Cette nouvelle méthode est comparée aux deux méthodes développées précédemment, afin de démontrer sa capacité à calculer une bonne approximation des gradients aéro-structure.
La disponibilité du gradient explicite des efforts aérodynamiques par rapport aux paramètres structuraux ouvre la porte à de nombreuses applications potentielles telles que le contrôle de charges, le dimensionnement de structures à grande flexibilité, ou encore l’obtention des taux d’échanges aérodynamique-structure (compromis masse-traînée) en optimisation multidisciplinaire. On démontre ainsi dans le Chapitre 5 l’intérêt d’utiliser le gradient des charges aéroélastiques pour l’optimisation du caisson voilure d’un modèle d’avion réaliste. Plus précisément, l’objectif est de résoudre un problème inverse pour retrouver en conditions de vol de croisière une loi de vrillage cible. Au cours de cette optimisation, les gradients sont calculés par méthode intrusive puis non-intrusive afin d’éta-blir une comparaison objective des différentes stratégies de calcul de gradient disponibles. La comparaison se concentre sur l’applicabilité de la stratégie d’optimisation à des cas industriels réalistes, en termes d’efficacité et de précision.
INTRODUCTION
Ce travail a donné lieu à la publication de plusieurs articles dans des congrès interna-tionaux à comité de lecture :
— C. Blondeau, T. Achard, P. Girodroux-Lavigne et R. Ohayon. Recent Achievements towards Aero-Structure Gradient Computation using High-Fidelity CFD-CSM in the ONERA elsA Software. Dans International Forum on Aeroelasticity and Structural
Dynamics, IFASD 2015, Saint Petersburg, Russia, 2015 ;
— T. Achard, C. Blondeau et R. Ohayon. An Uncoupled Approach to Compute Aero-Structure Gradients Using High-Fidelity CFD-CSM. Dans 17th AIAA/ISSMO
Multidisciplinary Analysis and Optimization Conference, AIAA Paper 2016-4121, Washington, USA, 2016, doi :10.2514/6.2016-4121 ;
— T. Achard, C. Blondeau et R. Ohayon. High-Fidelity Aero-Structure Gradient Computation Techniques. Application to the ONERA M6 Wing. Dans 12th World
Congress on Structural and Multidisciplinary Optimization, Braunschweig, Germany
, 2017 ;
— T. Achard, C. Blondeau et R. Ohayon, High-Fidelity Aero-Structure Gradient Computation Techniques. Application on the CRM Wing Design. Dans International
Forum on Aeroelasticity and Structural Dynamics, IFASD 2017, Como, Italy , 2017.
Un article a également été soumis dans l’AIAA Journal :
— T. Achard, C. Blondeau et R. Ohayon. High-Fidelity Aerostructural Gradient Computation Techniques. Application to a Realistic Wing Design. AIAA Journal, soumis en septembre 2017.
Chapitre 1
Présentation de l’état de l’art
L’objectif de cette partie est de situer ce travail de thèse dans le contexte de l’optimisation aéro-structure en aéronautique. On positionne également ce travail par rapport aux travaux existants réalisés à l’ONERA.
Cette partie est décomposée en trois axes. Le premier concerne l’optimisation aéro-structure en aéronautique et les grandes avancées dans ce domaine au cours des 40 dernières années. Puis, le thème spécifique du calcul des gradients est détaillé. Enfin, la dernière section reprend pour ces deux axes les avancées réalisées à l’ONERA et fait le lien avec ce travail de thèse.
1.1
Contexte général de l’optimisation aéro-structure en
aé-ronautique
1.1.1 Aeroelastic Tailoring
L’optimisation structurale s’est développée vers la fin des années 1960, pour des va-riables de dimensionnement (épaisseurs, sections) et de forme (voir la revue de [Adelman et Haftka]). L’optimisation en aérodynamique a démarré un peu plus tard, dans les années 1970, essentiellement pour des écoulements compressibles subsoniques, à l’aide de modèles aérodynamiques peu fidèles [Hicks et Szelazek 1978]. L’optimisation aéroélastique (autre-ment dit, la prise en compte des interactions du fluide avec la structure dans l’optimisation aérodynamique), apparait dans les années 1980, mais toujours en faisant appel à des simulations basse-fidélité (typiquement, méthode de la ligne portante), et des modèles
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
simples (méthode de plaque équivalente pour la structure par exemple) [Barthelemy et Bergen 1988].
Dans la même période, la conception du caisson voilure du Grumman X-29 (avion expérimental à flèche inverse) marque le début d’un nouveau genre de dimensionnement structure. La nécessité d’une optimisation particulière du caisson voilure composite fût dictée par l’instabilité de divergence statique inhérente aux voilures à flèche inverse. Cette instabilité aéroélastique fût éliminée en utilisant des matériaux composites à la place des traditionnels alliages d’aluminium et en adaptant les séquences d’empilement composites afin de générer une interaction aéroélastique favorable. Ce procédé relève de l’Aeroelastic
Tailoring [Shirk et al. 1986].
1.1.2 Optimisation intégrée
Lorsque des matériaux composites sont utilisés, ou plus généralement pour des ailes à fort allongement, la performance d’un avion dépend plus fortement des interactions fluide-structure. Dans ce cas, l’optimisation aéro-structure de l’avion, c’est-à-dire l’optimisation concurrente de l’aérodynamique et de la structure en tenant compte des interactions entre les deux disciplines est recommandée pour mieux prédire la physique impliquée dans le problème. Cependant ces interactions ont longtemps été négligées pour des raisons de coût de calcul. Ces limitations conduisirent les avionneurs à suivre une boucle d’optimisation séquentielle, chaque discipline gagnant en maturité séparément. Cependant, cette stratégie peut conduire à une configuration multidisciplinaire sous-optimale. En effet, la performance d’un système multidisciplinaire dépend non seulement des performance de chacune des disciplines, mais aussi de leurs interactions [Martins et Lambe 2013]. Dès lors, on com-prend l’importance d’un couplage fort entre les disciplines dans une boucle d’optimisation multidisciplinaire. Cela permet majoritairement d’identifier plus tôt et de manière plus fiable dès la phase de conception préliminaire les configurations prometteuses. Ainsi, en 1988, [Grossman et al.] prouvent sur l’optimisation aéro-structure d’une aile de planeur que l’optimisation séquentielle est clairement moins efficace que l’optimisation où le design est intégré, autrement dit lorsqu’on ne considère qu’un seul système aéro-structure qui échange avec l’optimiseur. Dans ce cas, la recherche d’un optimum (typiquement l’amélioration du
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
compromis masse/trainée en fonction de paramètres aérodynamiques et structuraux) est effectuée en considérant l’espace de recherche associé à ces deux fonctions objectifs et à l’en-semble des contraintes du système aéro-structure. La contrepartie d’une approche intégrée est la difficulté additionnelle associée au calcul des sensibilités des termes croisés entre les deux domaines. Il s’agit typiquement des gradients de la performance aérodynamique par rapport aux paramètres structuraux et des gradients des réponses structures par rapport aux paramètres aérodynamiques de forme. Afin de limiter ce coût de calcul supplémentaire, les modèles aérodynamique et structure utilisés dans l’article de [Grossman et al.] sont de faible fidélité (ligne portante, modèle poutre).
En 1989, [Haftka et al.] cherchent à réduire ce coût de calcul sur le même type d’op-timisation aéro-structure à design intégré, mais en considérant cette fois des panneaux aérodynamiques et des éléments finis. Pour ce faire, ils utilisent des procédures d’optimisa-tion numérique approchées. De plus, le calcul des dérivées croisées repose sur des méthodes par perturbations ne tenant compte que de l’impact des déformations en torsion sur la distribution de portance.
A cette époque, le constat partagé par ces auteurs est que la principale limitation est due au manque de puissance de calcul pour être capable d’améliorer le degré de fidélité des simulations, en particulier en aérodynamique.
1.1.3 Optimisation globale / optimisation locale
Les optimisations que les auteurs cités précédemment proposent font appel à des méthodes à base de gradients (méthodes de descente), ce sont donc des méthodes d’op-timisation destinées à chercher un optimum local. La recherche d’un optimum global à l’aide d’algorithmes tels que le recuit simulé [Cerny 1985], les colonies de fourmis [Do-rigo et al. 2006] ou encore les algorithmes génétiques [Holland 2010], a peu été utilisée car trop coûteuse par rapport aux méthodes de descentes. En particulier, les problèmes d’optimisation où le niveau de détail du design est élevé impliquent la prise en compte d’un grand nombre de paramètres de conception. De plus, lorsque le niveau de fidélité des simulations est également élevé (typiquement modélisation RANS/ modèle éléments finis tridimensionnel) afin de capturer par exemple les effets non-linéaires d’un écoulement
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
transsonique, l’optimisation basée sur les gradients est préférable pour résoudre de tels problèmes en un temps raisonnable. De ce fait, le calcul efficace des gradients est un moyen de limiter le coût d’une optimisation réaliste.
Il existe cependant des techniques d’hybridation entre les algorithmes d’optimisation globale et locale. On cherche alors à combiner les avantages de ces deux types d’algorithmes, autrement dit trouver un optimum global rapidement. Par exemple, [Toal et al.] proposent en 2011 un algorithme de recherche globale par essaims particulaires (voir [Kennedy et Eberhart 2001]), associé à un modèle réduit basé sur la technique du krigeage ([Krige 1951]) afin de réduire le coût de calcul. La construction de ce dernier appelle un algorithme de recherche locale basé sur le calcul de gradient par méthode adjointe. [Bompard] développe au cours de sa thèse un algorithme d’optimisation globale utilisant des modèles de substitution (krigeage, fonctions de base radiales (RBF), régression à vecteurs de support) qu’il étend afin de prendre en compte les gradients pour améliorer la précision des modèles et ainsi réduire le nombre d’évaluations nécessaires. [March et Willcox] présentent un algorithme d’optimisation multi-fidélité pour des problèmes sans contraintes, basé sur l’utilisation de RBF afin de modéliser l’erreur d’interpolation entre les fonctions haute-fidélité et basse-fidélité.
Les algorithmes d’optimisation hybrides (global/local) sont particulièrement prometteurs lorsqu’ils sont utilisés conjointement avec des surfaces de réponses multi-niveaux afin de corriger le modèle réduit via des calculs haute-fidélité. Cependant, ils ne font pas l’objet d’une étude particulière au sein de ces travaux en raison de leur coût de calcul encore trop important lorsque l’on étudie des configurations réalistes d’avions. On se concentrera donc, dans ce qui suit, sur des algorithmes d’optimisation basés sur des gradients.
1.2
Le calcul des gradients
1.2.1 Méthodes des Différences Finies et Complex Step
La façon la plus simple de calculer des gradients est probablement la méthode des différences finies. Elle est utilisée depuis les débuts de l’optimisation, et l’est encore aujourd’hui (voir par exemple [Hutchison et al. 1994] et [McQuade et al. 1995]). Cependant,
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
rapidement, certains auteurs ont commencé à rechercher de nouvelles méthodes pour le calcul des gradients. En effet, la méthode des différences finies souffre de problèmes de précision et de coût. La valeur du gradient obtenu peut être très sensible à l’amplitude de la perturbation du design, nécessitant un réglage précis de la valeur de cette amplitude pour chaque paramètre considéré. Si le pas choisi est trop grand, la précision du gradient peut être mauvaise, et s’il est trop faible, les valeurs obtenues peuvent être bruitées [Sobieszczanski-Sobieski et al. 1991]. De plus, le coût de la méthode est directement indexé sur le nombre de paramètres de conception.
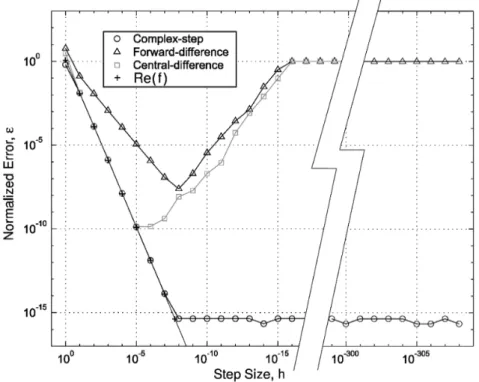
Une méthode de calcul des gradients également simple à implémenter est la méthode de la complex-step, qui repose sur l’utilisation de variables complexes pour estimer les dérivées. L’avantage par rapport aux différences finies est que cette méthode est robuste en terme de troncature numérique, ce qui la rend plus précise. Cependant, elle nécessite d’avoir un code de calcul complexe (au sens algébrique du terme), ce qui n’est pas notre cas dans le cadre de ces travaux de thèse. Une analyse détaillée de cette méthode est présentée dans [Martins et al. 2003]. La figure 1.1 issue de cet article illustre la discussion ci-dessus.
Figure 1.1 – Erreur relative des sensibilités calculées par différences finies et par la méthode de la complex-step [Martins et al. 2003].
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
Des gradients sont calculés par différences finies et par la méthode de la complex-step, et sont comparés avec des résultats analytiques pris comme référence. L’erreur relative entre chacune de ces deux méthodes et les résultats analytiques est tracée en fonction de la taille de pas. Les différences finies décentrées et centrées convergent vers la valeur exacte de manière linéaire et quadratique, respectivement. Cependant, quand le pas devient trop faible, les résultats ne sont plus fiables. Les résultats issus de l’approche complex-step convergent quadratiquement vers la valeur de référence, et pour des tailles de pas inférieures à 10−8 l’erreur relative reste stable à 10−15.
1.2.2 Méthode directe (ou tangente)
Il est proposé dans [Sobieszczanski-Sobieski 1990] un cadre de calcul pour déterminer les gradients des variables d’états des systèmes couplés. Il développe une méthode directe, analytique, basée sur une linéarisation des fonctions solutions du système couplé, aboutissant à la formation d’un système d’équations nommé Global Sensitivity Equations ou GSE. La résolution de ce système permet d’obtenir l’ensemble des gradients des fonctions solutions du système (objectifs et contraintes) par rapport au paramètre d’optimisation considéré. Le coût de cette méthode de calcul des gradients est donc indexé sur le nombre de paramètres du système, mais est quasiment indépendante du nombre de réponses. Elle est appliquée dans [Maute et al. 2001] pour la mise en œuvre d’une méthodologie d’optimisation aéroélastique pour un système modélisé par éléments finis pour la structure et par les équations d’Euler tridimensionnelles pour le fluide.
1.2.3 Méthode adjointe
Pour une optimisation haute-fidélité en aérodynamique, il y a en général peu de réponses du système (quelques dizaines) et de nombreux paramètres de conception (des centaines). Dans ce cas, il est préférable de calculer les gradients par méthode adjointe, qui rend alors le coût du calcul des gradients indépendant du nombre de paramètres du système (mais dépendant du nombre de réponses). [Jameson] propose en 1988 un article sur l’optimisation aérodynamique via la théorie du contrôle, et introduit ainsi l’utilisation de la méthode adjointe pour l’optimisation de forme en aérodynamique. Cela initie de
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
nombreuses recherches basées sur cette méthode (voir par exemple [Reuther et al. 1996], [Maute et al. 2000], [Nielsen et Anderson 2002], [Jameson 2004], [Salah El Din et al. 2006], [Gauger 2006], [Mavriplis 2007]) pour l’optimisation en aérodynamique. Notons ici qu’il y a une distinction à faire entre les méthodes directe/adjointe discrètes, et continues. Dans le premier cas, les équations continues gouvernant la physique sont discrétisées puis linéarisées, alors que dans le second, ces deux étapes sont effectuées dans l’ordre inverse. Une étude comparative entre l’adjoint continu et discret est donnée par [Nadarajah et Jameson] (2000). Ils simulent un écoulement non-visqueux autour d’un profil d’aile bidimensionnel et calculent les gradients d’une fonction aérodynamique par rapport à des paramètres affectant la forme du profil, avec la méthode adjointe continue, discrète, et par différences finies. Ils obtiennent sensiblement les mêmes résultats, cependant ils concluent que la méthode adjointe continue est préférable à sa variante discrète car cette dernière est plus coûteuse en temps calcul. De même, selon l’article de [Keulen et al.] (2005), le principal avantage des méthodes continues sur les méthodes discrètes est que la formulation des gradients est indépendante de la discrétisation du modèle et des schémas numériques. Cependant, l’approche "adjoint discret" reproduit les sensibilités exactes de la discrétisation d’origine des équations gouvernantes, ce qui permet de vérifier avec précision les gradients calculés avec cette approche [Nielsen et Anderson 2002]. De plus, cette formulation est plus simple à implémenter que la version continue [Mavriplis 2007]. Pour une raison de réutilisation de l’existant, c’est l’approche directe/adjointe discrète qui a été choisie dans ces travaux de thèse.
1.2.4 Différentiation automatique
La différentiation manuelle du code (c’est-à-dire à la main) est une tâche ardue, en particulier quand l’objectif est d’obtenir une capacité de calcul de gradient couplé. C’est pourquoi certains auteurs ont travaillé sur le concept de la Différentiation Automatique (DA) [Bücker et al. 2006]. Cette méthode est attractive du fait de sa consistance (les dérivées que l’on obtient sont très proches des dérivées exactes du modèle numérique), et de son apparente simplicité. Cependant, ce type de méthode produit généralement du code difficilement lisible, ce qui diminue la maîtrise que l’on peut en avoir. De plus, les
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
programmes sont souvent différentiables par morceaux seulement, et seul le développeur sait comment traiter les parties délicates, typiquement les discontinuités. En outre, le problème de la différentiation automatique d’un code faisant appel à plusieurs langages informatiques différents est loin d’être trivial, en particulier lorsque l’un de ces langages est un langage orienté-objet. Il s’agit malgré ces difficultés d’une voie prometteuse faisant l’objet de recherches actives [Hascoët 2014]. Elle a par exemple été utilisée dans [Kenway et al. 2014a] pour le développement de leur module de calcul des gradients aéro-structure, en combinaison avec des différentiations analytiques du code. Plus récemment, [Sanchez et al.] ont développé une approche générale pour appliquer la DA à un solveur fluide-structure complet, et ont implémenté cette solution dans le code open-source SU2.
Cette approche génère un code modulaire, ce qui la rend plus flexible d’utilisation. De plus, la DA peut servir à valider la différentiation manuelle en lieu et place des validations par différences finies ou tests de dualité. Néanmoins, dans le cadre de cette étude, tous les travaux de différentiation du code ont été réalisés manuellement.
1.2.5 Calcul des gradients dans le cadre d’une optimisation structure
En optimisation des structures, les méthodes analytiques ou semi-analytiques (c’est-à-dire lorsque certaines dérivées sont estimées à l’aide de différences finies, et d’autres par calcul analytique) telles que les méthodes directes ou adjointes pour le calcul des gradients sont très utilisées. Un caisson réaliste de voilure peut contenir plusieurs centaines de paramètres de conception et plusieurs dizaines de milliers de contraintes. Dans ce cas, le choix se porte plutôt sur la méthode directe pour le calcul des gradients. Toutefois, le coût associé à la méthode directe est également environ proportionnel au nombre de cas de charge considérés, qui peuvent être nombreux. De plus, à l’optimum du design, le nombre de contraintes critiques dans le problème d’optimisation (c’est-à-dire violées, actives, ou presque actives) est généralement inférieur au nombre de variables de design ([Haftka et Gürdal 1992]). La méthode adjointe est donc plus attractive pour des problèmes ayant des cas de charges multiples, ce qui est illustré dans [Akgün et al. 2001]. Cet article propose une étude comparative entre méthode directe et méthode adjointe (continues) pour différents modèles éléments finis d’avions.
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
1.2.6 Calcul des gradients dans le cadre d’une optimisation aéro-structure
Ces dernières années, avec l’utilisation de plus en plus importante des matériaux composites dans les avions de transport civil, la réflexion portée dans [Grossman et al. 1988] sur les désavantages de l’optimisation aéro-structure séquentielle par rapport à une optimisation où le design est intégré, autrement dit avec un couplage fort entre les disciplines, prend tout son sens. On peut citer la thèse de [Martins] (2002), les travaux de [Kenway et Martins] (2014), le travail de [Jameson] (2010) ou encore les travaux du DLR ([Brezillon et al. 2012]) comme des exemples d’optimisation aéro-structure en tenant compte de simulations haute-fidélité (RANS/élements finis), en utilisant la méthode adjointe pour le calcul des gradients. Dans l’ensemble de ces travaux, les optimisations portent sur la recherche du meilleur compromis entre trainée aérodynamique, masse, consommation spécifique de l’avion par exemple, en considérant parfois une approche multi-points. Cependant, étant donné les limites de la méthode adjointe lorsque le nombre de réponses du système est important, certains auteurs ont proposé une agrégation de ces contraintes dans une (ou quelques) fonction composite, comme la fonction de Kreisselmeier-Steinhauser (KS) [Kreisselmeier et Steinhauser 1979]. Celle-ci a été étudiée notamment dans [Poon et Martins 2007], puis comparée dans [Kennedy et Hicken 2015] avec une nouvelle classe de fonctions d’agrégation nommée agrégation-induite, plus précise que la fonction KS d’origine. Nous détaillons plus précisément la fonction KS dans l’introduction du Chapitre 4.
1.2.7 Stratégie de traitement de la déformation du maillage
Avec l’augmentation de la puissance de calcul, les simulations aéroélastiques statiques basées sur des modèles haute-fidélité sont aujourd’hui accessibles et capables de traiter des couplages aéroélastiques complexes. Pour améliorer le design des ailes flexibles, les techniques d’optimisation multidisciplinaires basées sur des gradients sont efficaces et largement utilisées. Résoudre de tels problèmes aéro-structure couplés nécessite une approche appropriée, en particulier lorsque la structure subit de grands déplacements. Il est proposé dans [Farhat et al. 1995] la formulation trois champs pour exprimer le système aéro-structure comme trois systèmes d’équations couplés, c’est-à-dire une par discipline plus une autre dédiée à la déformation du maillage fluide. Cette formulation trois-champs est
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
appliquée dans [Maute et al. 2001] à une optimisation aéro-structure. Cette optimisation est étendue dans [Barcelos et Maute 2008] à des modèles de plus haute fidélité afin de considérer les effets visqueux et ceux de la turbulence, ainsi que des non-linéarités géométriques du modèle éléments finis. Récemment, cette formulation a été réutilisée par [Zhang et al.] en y adjoignant des patchs B-spline tridimensionnels pour traiter à la fois la paramétrisation de la géométrie et la déformation de maillage. Cette amélioration leur a permis de réaliser des optimisations aéro-structure impliquant de grands changements géométriques, tout en préservant la qualité du maillage fluide.
Dans le travail présent, le sous-problème de la déformation de maillage n’est pas formulé en résidu, mais résolu explicitement à chaque itération. Cette approche peut ne pas être adaptée pour le traitement des grands déplacements, néanmoins cet algorithme de déformation de maillage a jusqu’ici prouvé son efficacité dans la plupart des applications. Il est présenté à la section 2.5.3.
1.2.8 Stratégies de résolution de systèmes couplés aéro-structure haute-fidélité
Le choix de la stratégie de résolution d’un système couplé est essentielle. La stratégie la plus fréquemment rencontrée dans la littérature repose sur une formulation faiblement couplée. Par exemple, le schéma NLBGS (Non-Linear Block Gauss-Seidel) se basant sur une méthode de point fixe est très utilisé. Cette approche alterne résolution du bloc fluide puis du bloc structure jusqu’à convergence du système couplé. Si le bloc d’équations structure peut être résolu par des solveurs directs, il n’en est pas de même pour le bloc fluide qui nécessite des techniques itératives. Les plus connues se basent sur des approches de type Newton. Dans ce cas, le système linéarisé est résolu avec un solveur itératif de type Newton-Krylov, ou alors converge vers une solution stationnaire en utilisant un schéma temporel associé à une phase implicite approchée (approché réfère ici à une approximation haute-qualité de la matrice jacobienne aérodynamique). Pour stabiliser la résolution des systèmes fortement couplés, il est généralement utile d’introduire une étape de relaxation pour les variables d’état de la structure, du fluide, ou des deux. La valeur optimale du paramètre de relaxation est généralement inconnue. Une amélioration classique et facile
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
à mettre en œuvre consiste à choisir un paramètre de relaxation dynamique obtenu par l’accélération de Aitken [Irons et Tuck 1969].
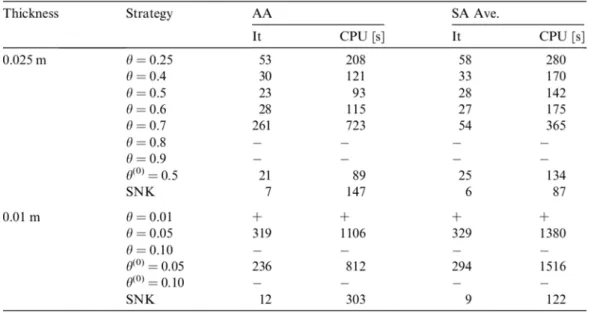
Typiquement, dans [Maute et al. 2000] est résolu un problème aéroélastique quasi-statique haute-fidélité en utilisant une méthode NLBGS. Le calcul des sensibilités est ensuite effectué en appliquant la même méthode, modifiée pour un problème linéaire. Constatant les limites de cette méthode, [Barcelos et al.] développent en 2006 une nouvelle méthode pour résoudre les problèmes quasi-statiques fluide-structure ainsi que le problème des sensibilités. Pour cela, ils utilisent une formulation "complément de Schur" qu’ils appliquent aux variables de l’interface du maillage aérodynamique. Les analyses aéroélastique et de sensibilité sont ensuite réalisées avec une méthode de type Newton-Krylov via l’algorithme GMRES (Generalized Minimal Residual- [Saad et Shultz 1986]). Cet algorithme utilise une projection sur l’espace de Krylov du vecteur solution, puis des techniques de minimisation du résidu mesurant l’écart entre l’équation à satisfaire et l’équation à l’itération courante du processus itératif de résolution. La nouvelle méthode de Barcelos et al. est nommée Schur-Newton-Krylov (SNK) et n’a pas de paramètre de relaxation à régler (noté θ dans leur article). Deux cas d’applications sont ensuite traités pour comparer la méthode par point-fixe, renommée STG dans l’article, et la nouvelle méthode SNK. Le 1er cas-test
considère un écoulement tridimensionnel modélisé par les équations d’Euler autour d’une plaque flexible. Deux configuration sont étudiées, considérant une épaisseur de plaque t = 0.025 m (configuration "stiff") puis t = 0.01 m (configuration "soft"). Le tableau 1.2 compare les résultats obtenus pour ce premier cas-test entre l’approche STG et l’approche SNK, lors de l’analyse aéroélastique (AA) et de l’analyse des sensibilités du système (SA). "+" signifie que la convergence n’est pas atteinte après 500 itérations, et "-" dénote un cas
de divergence.
Ces résultats démontrent la supériorité en temps-calcul de l’approche SNK dans tous les cas, sauf pour l’analyse aéroélastique du cas-test "stiff" pour lequel la méthode STG affiche de meilleurs résultats (après réglage du paramètre de relaxation). Pour le cas "soft", quelle que soit l’analyse, la méthode SNK est bien meilleure, car le problème fluide-structure est alors fortement couplé et par conséquent la méthode STG converge plus difficilement.
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
Figure 1.2 – Performance de calcul des méthodes STG et SNK pour les configurations "stiff" et "soft" [Barcelos et al. 2006].
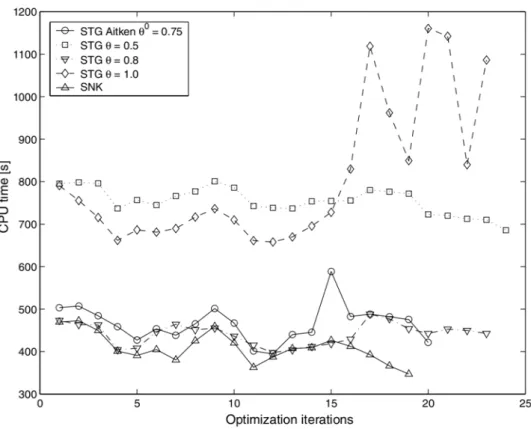
modèle éléments finis tridimensionnel est utilisé pour la structure, et le fluide est toujours modélisé par les équations d’Euler. La figure 1.3 représente le coût moyen total par itération du processus d’optimisation.
A nouveau, la méthode de Newton-Krylov apparait plus efficiente et plus robuste que la méthode basée sur le schéma de Gauss-Seidel, dont le choix approprié du paramètre de relaxation reste essentiel. Le potentiel de cette approche a ensuite été confirmé par plusieurs auteurs qui ont adopté des stratégies similaires pour la résolution du problème aéroélastique et de l’analyse des sensibilités ([Kenway et al. 2012], [Jovanov et al. 2016]), se démarquant notamment dans la stratégie de calcul de la jacobienne aérodynamique, ou dans le choix du ou des pré-conditionneurs appliqués au solveur GMRES lors de la résolution du système aéroélastique et du système tangent ou adjoint associé.
Dans ces travaux de thèse cependant, pour des raisons pratiques de réutilisation de l’existant, les analyses aéroélastique et de sensibilité reposent sur un schéma de Gauss-Seidel associé à un schéma d’intégration en temps Backward-Euler pour la résolution du bloc fluide (voir section 2.3.6). Par conséquent, une attention particulière sera portée sur le niveau de relaxation du système résolu, en particulier pour l’analyse des sensibilités par méthode adjointe. Cependant, une approche basée sur un algorithme block flexible GMRES
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
Figure 1.3 – Comparaison du coût moyen total par itération d’optimisation des méthodes STG et SNK au cours du processus d’optimisation [Barcelos et al. 2006].
pour la résolution de systèmes linéaires a récemment été implémenté dans elsA [Pinel et Montagnac 2013; Giraud et al. 2010].
1.3
L’optimisation aéro-structure à l’ONERA
Comme mentionné dans l’introduction, de récents travaux ont été menés à l’ONERA sur le sujet de l’optimisation de forme aérodynamique rigide (modélisation RANS) avec la thèse de [Drullion] (2004). La thèse de [Marcelet] (2008) étend ces travaux de manière à prendre en compte un modèle structure sous la forme idéalisée d’une poutre Euler-Bernouilli (et modèle fluide Euler/RANS), implémenter les méthodes de transfert forces/déplacements pour pouvoir réaliser une analyse aéroélastique, et enfin développer une capacité de calcul de gradients pour de l’optimisation de forme aérodynamique flexible. Au cours de sa thèse, [Ghazlane] (2012) complète ces outils afin de prendre en compte, dans le calcul des gradients, des paramètres structuraux en plus des paramètres aérodynamique de forme. A l’aide de ces
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
outils de calcul de gradients, un design préliminaire aéro-structure d’une aile à flèche inverse en utilisant une stratégie bi-niveau a été réalisé récemment [Viti et al. 2016]. Cependant, ces travaux restent limités à une modélisation poutre de la structure. En parallèle de ces thèses, plusieurs modules ont été implémentés dans le logiciel elsA de l’ONERA (voir Chapitre 2) :
elsA/Ael ([Girodroux-Lavigne 2007], [Girodroux-Lavigne et Dugeai 2014]) qui est dédié à
l’analyse aéroélastique haute-fidélité ; elsA/Opt [Peter et al. 2012] dédié à l’optimisation aérodynamique de forme rigide (modèle fluide uniquement) dont le développement s’est basé sur certaines des thèses citées précédemment, et elsA/Aoc [Blondeau 2015], le module le plus récent qui combine les possibilités de Ael et Opt afin de calculer des gradients de fonctions aérodynamiques flexibles haute-fidélité par méthodes tangente et adjointe. Ces gradients sont calculés par rapport à des paramètres aérodynamique de forme au début de la thèse, puis ce module est étendu au cours de la thèse afin de pouvoir prendre en compte des paramètres impactant la rigidité de la structure.
D’autre part, en 2007 et 2008, Airbus initie une série de Forums de Recherche eXternes (XRF) incluant le DLR, QinetiQ et l’ONERA. Dans ce cadre naît le projet ARTEMIS (Advanced R&T Enablers for Multidisciplinary Integrated Systems) ([Blondeau et Salah El Din 2012], [Salah El Din et al. 2013]). Son but est l’implémentation de la feuille de route de l’ONERA dans le domaine de la MDO haute-fidélité, afin d’en démontrer les bénéfices lors de la phase de conception préliminaire, ainsi que de s’atteler au problème de l’échange d’informations entre les tâches de conception préliminaire et les explorations au niveau conceptuel. Pour répondre à ces objectifs, la stratégie visée est la mise en place d’une méthodologie et d’un démonstrateur logiciel dédié à l’optimisation bi-disciplinaire (aérodynamique-structure) d’une configuration réaliste d’avion de transport civil. La figure 1.4 représente l’organisation globale du projet ARTEMIS. La brique la plus haute (Global Aircraft Process ou GAP) permet l’exploration de différents concepts d’avion de façon à répondre à un ensemble de spécifications (mission, capacité, géométrie, ...). Il s’agit donc d’une large exploration de l’espace de conception, afin de trouver les meilleurs compromis à l’aide d’optimisations multi-critère, en ayant à disposition le résultat des analyses sur des modèles haute-fidélité réalisées dans la brique du milieu. Celle-ci (Bi-Disciplinary Process ou BDP) est le siège des analyses multidisciplinaires (MDA) et des optimisations basées sur
CHAPITRE 1. PRÉSENTATION DE L’ÉTAT DE L’ART
Figure 1.4 – Organisation du projet ARTEMIS [Blondeau et Salah El Din 2012].
des outils haute-fidélité. La dernière brique représente un niveau de détail supérieur encore, pour le dimensionnement de panneaux composites (par exemple respecter les critères de flambage avancés).
La brique d’optimisation aéroélastique mise en place par l’ONERA est la brique intermédiaire BDP. Elle est inspirée d’une formulation BLISS (pour Bi-Level Integrated
System Synthesis) [Sobieszczanski-Sobieski et al. 1998]. Ce type de formulation appartient
aux méthodes d’optimisation dites Multidisciplinary Feasible (MDF) distribuées. Cette méthode se distingue des méthodes classiques de conception car elle considère le système dans sa globalité (conception intégrée), ce qui offre une alternative très intéressante aux méthodes d’optimisation séquentielles. Dans ce qui suit, on décrit de manière plus formelle la méthode BLISS.
Dans un système multidisciplinaire, les paramètres de conception peuvent être locaux (affectant un seul sous-système) ou partagés (affectant plusieurs sous-systèmes). Dans les méthodes d’optimisation multidisciplinaires, les méthodes sont dites multi-niveaux lorsque
![Figure 1.4 – Organisation du projet ARTEMIS [Blondeau et Salah El Din 2012].](https://thumb-eu.123doks.com/thumbv2/123doknet/14495628.718239/48.893.139.786.196.588/figure-organisation-projet-artemis-blondeau-salah-el-din.webp)