Romain HAMONOU
Contribution à l'analyse du comportement hors plan
des assemblages boulonnés
Application aux composites thermoplastiques tissés
JURY
Président : Alain DAIDIE, Professeur des Universités, Université de Toulouse Rapporteurs : Pierre Alain BOUCARD, Professeur des Universités, ENS Cachan
Nicolas PERRY, Professeur des Universités, Arts et Métiers PariTech, Talence Invité : Pierre CHALANDON, Responsable du pôle IDA, CETIM, Saint-Etienne Directeur de thèse : Laurent GORNET, Maître de Conférences HDR, Ecole Centrale de Nantes Co-directeur de thèse : Frédéric JACQUEMIN, Professeur des Universités, Université deNantes
Mémoire présenté en vue de lʼobtention
du grade de Docteur de lʼÉcole Centrale de Nantes
sous le sceau de l’Université Bretagne Loire
École doctorale : Sciences Pour l’Ingénieur, Géosciences, Architecture
Discipline : Mécanique des solides, des matériaux, des structures et des surfaces Unité de recherche : Institut de Recherche en Génie Civil et Mécanique
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 2
« Le savoir scientifique n’est pas absolu, mais socialement, culturellement, technologiquement et historiquement
marqué, donc provisoire. »
Steven Rose
*******
« Rechercher la vérité, c’est comme regarder un escargot en poursuivre un autre. C’est un mouvement lent, mais
obstiné. »
Henning Menkel
*******
« Celui qui trouve sans chercher est celui qui a longtemps cherché sans trouver. »
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 3
Contribution à l'analyse du comportement hors plan des assemblages
boulonnés - Application aux composites thermoplastiques tissés
RESUME : Ces travaux de thèse portent sur le dimensionnement des assemblages boulonnés à base de
substrats en composite thermoplastique, et plus spécifiquement sur le comportement hors plan de ce type de liaisons. La première partie du travail est dédiée à la caractérisation mécanique des matériaux composites thermoplastiques. Les sensibilités des matrices polyamides liées au phénomène de fluage et à la reprise en humidité sont appréhendées expérimentalement. L’identification expérimentale des propriétés mécaniques est complétée à l’aide de simulations numériques sur le Volume Elémentaire Représentatif du matériau. Les modèles analytiques actuels de dimensionnement des assemblages boulonnés VDI 2230 servent à calculer précisément la souplesse équivalente des éléments de l’assemblage, à savoir des pièces et du boulon. Ces modèles ont été initialement établis pour les matériaux métalliques d’où la nécessité d’étendre ces travaux afin de les adapter aux matériaux composites. Par conséquent, nous présentons des méthodes permettant d’identifier expérimentalement et numériquement les souplesses de pièces composites. Pour ce faire, une procédure d’homogénéisation, basée sur une équivalence énergétique a été proposée afin de calculer les souplesses des constituants de l’assemblage. Ces résultats sont comparés à l’approche analytique du modèle. Un ajustement du modèle VDI est proposé dans le cas des assemblages centrés à substrats composites. Le facteur d’introduction de charge et le coefficient de filtrage des liaisons boulonnées sont étudiés expérimentalement et numériquement. Finalement, une approche analytique est proposée afin d’enrichir le modèle existant.
MOTS CLES : composites thermoplastiques, joints boulonnés, comportement hors plan, simulations, expériences.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 4
Contribution to the analysis of the out-of-plane behaviour of bolted joints -
Application to woven thermoplastic composites
ABSTRACT: This PhD research investigates the design of bolted joints with thermoplastic composite
substrates, and more specifically on the out-of-plane behaviour of this type of connections. The first part of this study is dedicated to the mechanical characterization of thermoplastic composite materials. The sensitivities of polyamide matrix related to the creep phenomenon and to the moisture sorption are experimentally studied. The experimental identification of the mechanical properties is completed by means of numerical simulations on the Representative Elementary Volume of material. The current analytical models of design of the bolted joints assemblies VDI 2230 allow to calculate exactly the compliance of the elements of the assembly, meaning the parts and bolt. Initially, these models were established for the metallic materials hence the necessity to extend these works to composite materials. Consequently, we present methods to identify experimentally and numerically the compliances of composite parts. To do it, a homogenization process, based on energy equivalence, was proposed to calculate the compliances of the assembly components. These results are compared with the analytical approach to the VDI model. An adjustment of this model is proposed in the case of the centred assemblies in composite substrates. The load introduction factor and the filtering coefficient of the bolted connections are studied experimentally and numerically. Finally, an analytical approach is proposed to enrich the existing model.
KEY WORDS: thermoplastic laminates, bolted joints, out-of-plane behaviour, simulations, experiments.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 6
Remerciements
La réalisation d’une thèse de doctorat est un travail qui ne s’effectue pas tout seul et qui s’inscrit dans la durée. Aussi, j’aimerai profiter de cet exercice de style pour remercier toutes celles et ceux, qui à leur manière, ont contribué à l’aboutissement de ce travail.
Je souhaiterais remercier tout d’abord mes deux rapporteurs, les Professeurs Pierre-Alain Boucard et Nicolas Perry, d’avoir accepté cette tâche, mais aussi pour l’intérêt qu’ils ont manifesté envers ces travaux. Je les remercie également sincèrement pour le temps qu’ils ont accordé à la lecture de ce manuscrit ainsi qu’à l’élaboration de leurs rapports. Je tiens à remercier chaleureusement le Professeur Alain Daidié de m’avoir fait l’honneur et le plaisir de présider mon jury de thèse. C’est avec beaucoup d’attention que j’ai écouté son analyse à l’égard de ce travail.
C’est avec plaisir que j’adresse mes vifs remerciements à mon directeur de thèse Laurent Gornet et mon co-directeur de thèse Frédéric Jacquemin. Je vous remercie pour votre confiance et votre engagement ainsi que pour les nombreuses discussions (scientifiques ou non) que j’ai eu le plaisir de partager à vos côtés. Vos précieux conseils complémentaires m’ont permis aux bons moments d’évoluer de H(x) vers δ(x).
Ce travail de doctorat à fait l’objet d’une collaboration avec un partenaire industriel, le CETIM. C’est donc logiquement que je souhaite dire un grand merci à Pierre Chalandon, responsable du pôle IDA. Je le remercie pour ses conseils avisés et son soutient tout au long de ces travaux ainsi que pour sa présence dans mon jury. Je tiens également à remercier Stéphane Auger, ingénieur du pôle IDA, pour nos différents échanges et plus particulièrement pour son importante contribution en ce qui concerne les parties expérimentales de ce travail.
Je remercie l’ensemble des membres de l’équipe Modélisation et Simulation du laboratoire du GeM dans laquelle a été effectué ce travail. Je pense aux doctorant(e)s et post-doctorant(e)s, mais également aux permanents.
La suite de ces remerciements s’adresse bien évidemment à mon entourage proche. Je pense tout d’abord à mes parents et à ma sœur. Par un savant mélange d’amour et de confiance, ils m’ont laissé m’épanouir tout au long de mes études et notamment lors de cette thèse. C’est avec émotion que je leur dédie le fruit de ces efforts et j’espère être à la hauteur de leur soutien inconditionnel. Je remercie également très chaleureusement mes ami(e)s pour leur présence sans faille.
Enfin, je ne saurais clore ce préambule sans remercier ma chère épouse, Manon, pour son soutien remarquable, quotidien et indéfectible ainsi que pour son enthousiasme contagieux à l’égard de mon parcours comme de la vie en général.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 8
Table des matières
INTRODUCTION GENERALE...20
CHAPITRE I : ETUDES BIBLIOGRAPHIQUES ...22
ASSEMBLAGES COMPOSITES ET COMPORTEMENT HORS PLAN DES LIAISONS BOULONNEES ...22
1 Partie A : Etat de l’art des techniques d’assemblage des composites...24
1.1 Le collage structural appliqué aux composites...24
1.1.1 Problématiques mécaniques autour des assemblages composites collés et leurs limites ...25
1.1.2 Synthèse des joints collés ...29
1.2 Exemples de liaisons innovantes dédiées aux assemblages composites et limitations dans le cas de chargements hors plan ...29
1.2.1 Le Z-pinning ...29
1.2.2 Les pins CMT ...30
1.2.3 Le rivetage auto-poinçonneur...32
1.3 Conclusion ...33
2 Partie B : cas particulier des assemblages boulonnés/rivetés : comportement hors plan ...34
2.1 Introduction ...34
2.2 Les liaisons rivetées ...34
2.3 Les liaisons boulonnées ...36
2.3.1 Définition de la notion de précharge ...36
2.3.2 Les intérêts de la précharge – cas des assemblages boulonnés composites ...37
2.3.3 Introduction au serrage et aux techniques usuelles répertoriées ...38
2.4 Les types d’assemblages boulonnés et les modes de sollicitations ...39
2.5 Les modes de rupture des assemblages composites boulonnés ...40
2.5.1 Cas particulier de la rupture par matage ...42
2.6 Dimensionnement et modèles analytiques actuels des liaisons boulonnées soumises à un chargement axial ...47
2.6.1 Modèle de Rasmussen (1978) ...47
2.6.2 Modèle VDI 2230 (1986) ...48
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 9
2.6.4 Modèle de Massol (1994) ...51
2.6.5 Modèle VDI 2230 (2003) ...52
2.6.6 Modèle d’Alkatan (2005) ...55
2.7 Synthèse et choix de l’orientation des travaux ...57
CHAPITRE II : COMPORTEMENT MECANIQUE DES STRATIFIES GF/PA6 ET T700/PA66 ...58
3 Introduction aux matériaux composites ...60
3.1 Prérequis conceptuels au sujet des composites ...60
3.1.1 Une définition des composites ...60
3.1.2 Les renforts...60
3.1.3 Les matrices organiques...61
3.2 Description des stratifiés de l’étude : le GF/PA6 et le T700/PA66 ...63
3.2.1 Les fibres de carbone T700 ...63
3.2.2 Les fibres de verre (GF) ...63
3.2.3 Les matrices PA6 et PA66 ...63
4 Approche expérimentale : la caractérisation mécanique des stratifiés GF/PA6 et T700/PA66 ...64
4.1 Introduction ...64
4.2 Comportement élastique du pli élémentaire composite : cas orthotrope ...64
4.2.1 Matrice de rigidité du composite orthotrope ...65
4.3 La caractérisation des propriétés mécaniques dans le plan : procédure expérimentale et post-traitement ...66
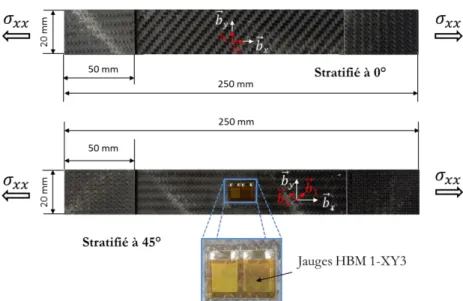
4.3.1 Caractérisation dans le sens des fibres : orientation à 0° ...67
4.3.2 Caractérisation en cisaillement : orientation à 45° ...70
4.4 Des sensibilités différentes au fluage, à l’humidité et à la température entre les matrices thermodurcissables et les matrices thermoplastiques ...73
4.4.1 Introduction des bases physiques du mécanisme de fluage ...73
4.4.2 Une sensibilité à la reprise en humidité ...76
4.4.3 Des sensibilités thermiques variables en fonction de la nature de la matrice : thermoplastique ou thermodurcissable ...78
4.5 Démarche et procédures dans le cadre de la détermination des propriétés mécaniques hors plan 79 4.5.1 La corrélation d’images (DIC : Digital Image Correlation) ...79
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 10
4.5.2 Caractérisation du module hors plan à l’aide de mesures LVDT ...82
4.5.3 Caractérisation Non Destructive (CND) par méthode ultrasonore ...85
4.5.4 Résultats expérimentaux ...91
4.5.5 Bilan ...94
4.6 Discussions quant aux limitations expérimentales et conclusion ...95
5 Une alternative numérique pour compléter l’ensemble des propriétés mécaniques élastiques des stratifiés ...96
5.1 Introduction ...96
5.2 Changement d’échelle et homogénéisation numérique des microstructures périodiques ...97
5.2.1 Lois de comportement en élasticité linéaire ...97
5.2.2 Principe de l’homogénéisation en élasticité linéaire ...97
5.2.3 Conditions périodiques ...98
5.2.4 Lemme de Hill-Mandel ...99
5.3 Identification numérique des propriétés élastiques du VER ...99
5.3.1 Définition de la cellule élémentaire ...99
5.3.2 De la géométrie vers un modèle éléments finis robuste ... 100
5.3.3 Introduction à la méthode des Eléments Finis Etendus (X-FEM) ... 100
5.3.4 Des éléments de précisions concernant les aspects numériques ... 102
5.4 Modélisation numérique du VER ... 103
5.5 Conclusion du Chapitre II ... 106
CHAPITRE III : COMPORTEMENT HORS PLAN DES ASSEMBLAGES BOULONNES COMPOSITES THERMOPLASTIQUES... 108
6 Caractérisation des souplesses des pièces ... 110
6.1 Introduction ... 110
6.1.1 Souplesse du boulon ... 111
6.1.2 Souplesse des pièces assemblées ... 111
6.2 Identification des souplesses : démarche ... 113
6.2.1 Méthodologie ... 113
6.3 Détermination des souplesses par un critère énergétique ... 114
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 11
6.4.1 Une première validation de l’approche énergétique sur un modèle 2D axisymétrique ... 116
6.4.2 Identification numérique des souplesses des pièces composites ... 118
6.4.3 Résultats des souplesses obtenues pour l’aluminium 7075T6 ... 118
6.4.4 Résultats des souplesses obtenues pour le stratifié T700/PA66 ... 121
6.5 Corrélation entre les calculs sous COBRA V6 et Cast3M ... 123
6.6 Identification des souplesses : approche expérimentale ... 124
6.6.1 Dispositif expérimental et exploitation ... 124
6.7 Corrélation essais - calculs ... 127
6.8 Ajustement du modèle analytique de type VDI 2230 pour les composites ... 128
6.8.1 Modèle actuel et remarques ... 128
6.8.2 Une proposition de modification du modèle en souplesse VDI 2230 pour les composites129 7 Etude du coefficient de filtrage et du facteur d’introduction de charge ... 131
7.1 Objectifs et définitions ... 131
7.1.1 Objectifs de l’étude ... 131
7.1.2 Facteur d’introduction de charge ... 132
7.1.3 Coefficient de filtrage ... 132
7.2 Dispositif expérimental... 133
7.2.1 Montage ... 133
7.3 Etude éléments finis ... 134
7.3.1 Modèle numérique... 134
7.3.2 Résultats ... 135
7.4 Synthèses des travaux et discussion ... 138
7.5 Une proposition de modèle analytique ... 139
7.6 Conclusion du Chapitre III ... 143
PERSPECTIVES ... 148
BIBLIOGRAPHIE ... 150
ANNEXES ... 158
Annexe n°1 : procédure de collage des jauges de déformation ... 159
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 12 Annexe n°3 : procédure d’étalonnage des capteurs LVDT HBM WI 5 mm ... 164 Annexe n°4 : Illustration de la méthode X-FEM sur un cas 1D : barre en traction en bi-matériau ... 169 Annexe n°5 : Résultats expérimentaux des essais d’identification du coefficient de filtrage pour le GF/PA6 ... 171
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 13
Table des illustrations
Figure 1 - Exemple des secteurs industriels et des applications qui nécessitent l’emploi des matériaux composites : (a) l’automobile (BMW série 7), (b) l’aéronautique (A350), (c) l’énergie (l’éolien) et (d) le sport (fauteuil roulant de l’U.S. Paralympic Track & Field Team). ...20 Figure 2 – Illustration de techniques d’assemblage multimatériaux. ...21 Figure 3 - Représentation schématique de la répartition des contraintes de cisaillement (a) et des contraintes de pelage (b) : cas d'un assemblage collé simple recouvrement. ...26 Figure 4 - Illustration d'un matériau dont le comportement est élastique et parfaitement plastique...27 Figure 5 - Modélisation 3D d'une liaison adhésive simple recouvrement appliquée à des substrats composites (Satthumnuwong, 2011). ...28 Figure 6 - Schéma du procédé Z-pinning (Pegorin, Pingkarawat, Daynes, & Mouritz, 2015). ...29 Figure 7 - (a) Photographies de Z-pins sollicités en mode I et (b) défauts créés par la présence des Z-pins (Pegorin, Pingkarawat, Daynes, & Mouritz, 2015). ...30 Figure 8 - Assemblage multimatériaux utilisant des picots pointes sollicités en traction (Joesbury, Ayre, Partridge, Colegrove, & Williams, 2011)...30 Figure 9 - Illustration de l'amélioration à la tenue mécanique en traction des assemblages utilisant des pins CMT (Ucsnik, Scheerer, Zaremba, & Pahr, 2010). ...31 Figure 10 - Simulation numérique d’un assemblage métal/composite thermoplastique par CMT pins (Paroissien S. , 2016). L’image de droite indique l’évolution des contraintes de Von Mises au cours du chargement selon l’axe x...31 Figure 11 – (a) Distribution de la dureté le long d’une jambe d’un rivet dans un assemblage multimatériaux (Liu, 2016). (b) Simulation du procédé de rivetage auto-poinçonneur (LS-DYNA, 2013). ...32 Figure 12 - Représentations schématiques d’un assemblage composé de trois rivets sollicités en traction et de la déformation élastique mise en jeu en fonction des souplesses des pièces et des rivets (Gambelin, 2010). ...35 Figure 13 - Représentation schématique illustrant les différences de comportement d'un rivet et d'un boulon dans le cas d'un chargement axial centré...36 Figure 14 – Effets induits par l’application d’un couple de serrage. ...36 Figure 15 - Schémas de principe des effets induits lors du serrage d'un boulon. ...37 Figure 16 - Illustration des modes de sollicitation des assemblages boulonnés : (a) cisaillement et (b) traction. ...39 Figure 17 - Types d'éclissages avec les grandeurs géométriques associées...39 Figure 18 - Représentation schématique de la déformation en flexion pour un montage en simple recouvrement. ...39 Figure 19 - Schéma d'un assemblage double recouvrement et des forces impliquées. ...40 Figure 20 - Schéma illustrant les modes de rupture des assemblages boulonnés dans les structures composites quasi-isotropes à fibres de carbone et à matrice thermodurcissable (Gohorianu, 2008). ...40
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 14 Figure 21 - Modes de rupture des assemblages - Calcul des contraintes moyennes et des conditions
favorables respectives (Gohorianu, 2008). ...41
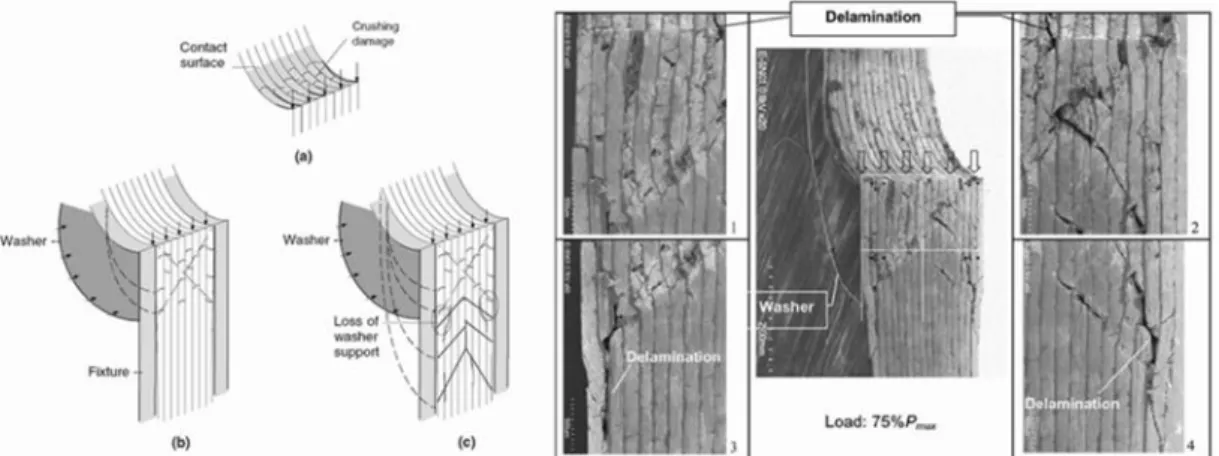
Figure 22 - A gauche, les trois phases de la rupture en matage, (a) écrasement de contact, (b) endommagement confiné sous les rondelles de serrage, (c) propagation de l'endommagement hors de la zone de serrage. A droite, micrographie des dommages à 75 % de Fmax (Xiao & Ishikawa, 2005). ...43
Figure 23 - Tenue de l'assemblage en fonction du rapport D/w (Stellbrink, 1992)...44
Figure 24 - Influence du rapport e/D sur la contrainte à rupture (Stellbrink, 1992). ...45
Figure 25 - Evolution de la contrainte à rupture en fonction de la contrainte de serrage (Starikov & Schön, 2002). ...46
Figure 26 - Diagramme effort de matage/effort passant pour la rupture finale de l’éprouvette (Crews & Naik, 1987). ...46
Figure 27 - Courbe de matage standard d’un assemblage composite boulonné. La non-linéarité au début de la contrainte de matage est associée à une phase de reprise des jeux et de stabilisation de la surface de contact entre la fixation et le trou. ...47
Figure 28 - (a) Modèle éléments finis de Rasmussen et (b) définition des paramètres de l’assemblage. ...48
Figure 29 - Montage d'essai utilisé pour la conception de la norme VDI 2230 de 1986. ...49
Figure 30 - Définition du modèle équivalent. ...49
Figure 31 - Modélisation E.F. proposée par (N'Guyen, 1989)...50
Figure 32 - (a) Visualisation de la zone de déformation réelle et de la zone considérée dans le modèle de calcul équivalent. (b) Illustration d'un assemblage boulonné et de la troncature du cône de compression avec une zone conique sur la hauteur lv et cylindrique sur la hauteur lH (VDI 2230, 2003). ...52
Figure 33 – (a) Evolution de l'angle phi (°) en fonction du diamètre extérieur et de la hauteur des pièces. Les résultats du « mapping » du bas correspondent à un assemblage vissé ceux du haut à un assemblage boulonné. ...53
Figure 34 – (a) Maillage du modèle E.F. 3D. (b) Allure de la déformée du modèle E.F. : moment de 66 N.m et F = 0. Le code couleur correspond à la contrainte de Von Mises (diamètre de vis M 24) (Alkatan, 2005). ...55
Figure 35 – (a) Illustration des constituants d’un pli tissé composite et (b) représentation d’un stratifié tissé composé de n plis. ...60
Figure 36 - Différents types d'architecture de renfort : (a) unidirectionnelle, (b) bidirectionnelle, (c) tridimensionnelle et (d) multidirectionnelle (mat). ...61
Figure 37 – Organigramme des constituants des matériaux composites. Le fléchage rouge indique la catégorie de composites relative aux travaux de cette thèse, à savoir des composites thermoplastiques tissés sergés. ...62
Figure 38 – Représentation d’un pli élémentaire d’un stratifié orthotrope. ...64
Figure 39 – Géométrie des éprouvettes de traction utilisée pour la caractérisation mécanique des composites T700/PA66 et GF/PA6...66
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 15 Figure 40 – Repère du pli élémentaire pour le T700/PA66 : le repère global en noir (O, ), et le
système de coordonnée locale en rouge (O, ). ...67
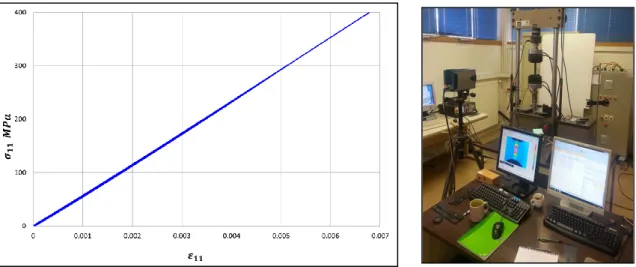
Figure 41 - Courbe contrainte/déformation de traction longitudinale pour le stratifié T700/PA66. ...68
Figure 42 – Détermination du coefficient de Poisson pour le stratifié T700/PA66. ...68
Figure 43 – Courbe contrainte/déformation pour le stratifié GF/PA6 orienté à 0°. ...69
Figure 44 – Evolution de la température de surface d’éprouvette en °C en pour le T700/PA66 orienté à 0° lors d’un essai de traction quasi-statique. La contrainte à rupture est de 603 MPa. ...70
Figure 45 – Courbe contrainte/déformation de cisaillement à 2 mm.min-1 pour le stratifié T700/PA66. ..71
Figure 46 – Courbe contrainte/déformation de cisaillement à 2 mm.min-1 pour le stratifié GF/PA6. ...72
Figure 47 – Evolution de la température en surface en °C pour le T700/PA66 orienté à 45° lors d’un essai de traction quasi-statique. La contrainte à rupture est de 250 MPa. ...72
Figure 48 - Conformation théorique possible des chaines d’un PA6 avec liaisons hydrogènes en rouge. ...73
Figure 49 – Essai de fluage réalisé sur une éprouvette en T700/PA66 de 6 mm d’épaisseur. ...74
Figure 50 – Mise en évidence par éléments finis de la répartition des contraintes de Von Mises dans un boulon. ...75
Figure 51 - Courbes de sorption d’une éprouvette en T700/PA66 et du PA66 pour 75% d’humidité relative à 23°C. ...77
Figure 52 - Essais de traction induisant du cisaillement plan [±45°], éprouvette A conditionnée à 75% HR pendant 1 mois et éprouvette B non conditionnée. ...77
Figure 53 – Méthode du tracking entre l’image de référence I et une image I* après déformation . ...80
Figure 54 – Artefacts de manip. à éviter dans le cadre de la corrélation d’images 2D : (a) déformation hors plan (O, ) et (b) position de la caméra non orthogonale au plan (O, ) avec un angle . ..81
Figure 55 - Dispositif expérimental utilisé pour déterminer le module E3. ...81
Figure 56 – Présentation de l’outillage en contact avec les échantillons et du positionnement des capteurs LVDT utilisés pour la mesure de déplacement lors des essais de compression...83
Figure 57 - Courbes brutes effort/déplacement afin de caractériser le module , diamètres extérieurs de 36 mm...83
Figure 58 – Courbes contrainte/déformation afin de caractériser le module E3 (T700/PA66)...84
Figure 59 - Courbes contrainte/déformation afin de caractériser le module E3 (GF/PA6). ...84
Figure 60 - Dispositif expérimental de Contrôle Non Destructif ultrasonore. ...86
Figure 61 – Illustration schématique du contrôle ultrasonore par échographie : (a) matériau sain, (b) matériau endommagé. ...89
Figure 62 - Oscilloscope et amplificateur de signal...90
Figure 63 - Transducteur piézoélectrique paramétrique C541 – Ø 10 mm et de fréquence 5 MHz pour le T700/PA66...90
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 16 Figure 64 – Illustration schématique du phénomène d’atténuation de l’onde ultrasonore en fonction de la longueur d’onde dans un milieu d’indice ...93 Figure 65 – Illustration schématique des signaux associés au T700/PA66 et au GF/PA6. ...93 Figure 66 – Schéma illustrant les différentes approches mécaniques possibles pour modéliser le comportement des matériaux composites, à partir de (Couégnat, 2008). ...96 Figure 67 – Représentation des six cas de chargement nécessaires à la reconstruction de la matrice homogénéisée. ...98 Figure 68 - (a) VER d’un stratifié tissé sergé et (b) son équivalent numérique obtenu sous TexGen®. ...99 Figure 69 – Modélisation d’une inclusion circulaire dans une plaque carrée par la méthode X-FEM. (a) Définition des nœuds enrichis. (b) Localisation de l’interface par une fonction level-set (Lé, Legrain, & Moës, 2016). ... 101 Figure 70 – Représentation de l’interface en utilisant une fonction level-set. Les traits pleins noirs indiquent les arrêtes du maillage. Le trait plein bleu représente l’interface réelle. Les nœuds symbolisés par les triangles verts indiquent que et les nœuds, aux carrés bleus et au nœud représenté par le cercle rouge. Le trait pointillé bleu indique la géométrie approchée par la level-set (Lé, Legrain, & Moës, 2016). ... 102 Figure 71 – Déformées et déplacements équivalents pour les six cas de chargements unitaires ij = 1. .... 104
Figure 72 – Répartition des contraintes de Von Mises (bornées entre 200 et 800 MPa) pour 33 = 1. ... 104
Figure 73 – Zoom des contraintes de Von Mises au niveau de l’interface fibres/matrice pour 33 = 1. Le
couplage de X-FEM et des level-sets autorise une discontinuité matérielle des phases (fibres/matrice) au sein d’une maille de calcul. ... 105 Figure 74 – Représentation d’un assemblage boulonné centré et du modèle associé de ressorts équivalents. ... 110 Figure 75 – Zone de déformation lors de la compression des pièces pour un assemblage centré et modélisation par un double cône selon la recommandation VDI... 112 Figure 76 – Schéma illustrant la troncature du cône de compression en fonction des géométries des pièces ( diamètre des pièces, diamètre de la base du cône et diamètre d’appui). ... 112 Figure 77 – Géométrie des pièces : diamètre des pièces, diamètre du trou et hauteur des pièces. ... 114 Figure 78 – Résultats analytiques et numériques des souplesses des pièces pour l’aluminium... 116 Figure 79 – Souplesses du boulon pour différents diamètres de pièces en aluminium d’après le modèle EF 2D ( . ... 117 Figure 80 – (a) Géométrie et C.L., (b) champ de déplacement Uzz et (c) répartition des contraintes σzz. . 118
Figure 81 – (a) Géométrie initiale et (b) réduction de la zone d'intérêt à partir du critère énergétique. .... 118 Figure 82 - Résultats des calculs analytiques obtenus à partir du logiciel COBRA V6 et des simulations EF effectuées sous Cast3M pour des pièces en Aluminium 7075T6 d’une épaisseur de 12 mm - E3 = 69000
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 17
Figure 83 - Résultats des angles obtenus à partir du modèle VDI 2230. ... 120
Figure 84 - Résultats des souplesses obtenus sous COBRA V6 pour le T700/PA66. ... 122
Figure 85 - Résultats des souplesses obtenus sous Cast3M pour le stratifié T700/PA66 et des épaisseurs de 6 et 12 mm. ... 123
Figure 86 - Comparaison des résultats des souplesses du T700/PA66 en fonction des diamètres extérieurs des pièces. Les calculs sont effectués sous le logiciel COBRA V6 (CETIM) et sous Cast3M pour des épaisseurs de 6 et 12 mm. Les écarts sont attribués aux limitations du modèle analytique de la VDI. ... 124
Figure 87 - Résultats des souplesses obtenues pour l’aluminium 7075T6 et des hauteurs de pièces de 100 mm. ... 125
Figure 88 - Résultats des souplesses obtenues pour l’aluminium 7075T6 et des hauteurs de 100 mm. .... 126
Figure 89 – Dispositif expérimental utilisé pour la mesure des souplesses des pièces. ... 127
Figure 90 – Résultats des essais de souplesse pour le T700/PA66 et le GF/PA6 (épaisseur 6 mm). ... 127
Figure 91 - Comparaison des résultats des souplesses en fonction des diamètres extérieurs des pièces pour le T700/PA66 et une épaisseur de 6 mm. ... 128
Figure 92 – Résultats des souplesses E.F. (Cast3M) et analytiques (VDI 2230) pour le T700/PA66 et allant de 28 à 48 mm pour = 6 mm. ... 130
Figure 93 – Résultats des souplesses E.F. (Cast3M) et analytiques corrigés à partir des nouveaux coefficients ( , , ) pour le T700/PA66 = 6 mm. ... 130
Figure 94 – Résultats des souplesses E.F. (Cast3M) et analytiques (VDI 2230) pour le T700/PA66 et allant de 28 à 48 mm pour = 12 mm... 130
Figure 95 – Résultats des souplesses E.F. (Cast3M) et analytiques corrigés à partir des nouveaux coefficients ( , , ) pour le T700/PA66 = 12 mm. ... 130
Figure 96 – Résultats des souplesses E.F. (Cast3M), COBRA V6 et analytiques corrigés à partir des nouveaux coefficients ( , , ) pour le T700/PA66 = 6 mm. ... 131
Figure 97 – Résultats des souplesses E.F. (Cast3M), COBRA V6 et analytiques corrigés à partir des nouveaux coefficients ( , , ) pour le T700/PA66 = 12 mm. ... 131
Figure 98 – Modèle de ressorts équivalents d’un assemblage boulonné centré et visualisation du facteur d’introduction de charge avec : Lp la hauteur des pièces, Dp le diamètre des pièces, p la souplesse des pièces et b la souplesse du boulon. ... 132
Figure 99 – Diagramme illustrant l’intérêt du coefficient de filtrage λ et de la précontrainte. ... 133
Figure 100 – Dispositif expérimental utilisé pour l’identification du paramètre λ en fonction de . ... 133
Figure 101 – Configuration ≈ 1. ... 134
Figure 102 – Configuration ≈ 0. ... 134
Figure 103 – Chargement et conditions aux limites pour la configuration où ≈ 1. ... 135
Figure 104 – Résultats expérimentaux pour la configuration ≈ 0 pour l’aluminium. ... 136
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 18
Figure 106 – Résultats expérimentaux pour la configuration ≈ 1 pour l’aluminium. ... 137
Figure 107 – Résultats expérimentaux pour la configuration ≈ 1 pour le T700/PA66. ... 137
Figure 108 – Synthèse des résultats numériques (FEM) et expérimentaux (Exp) pour le coefficient de filtrage λ. Ces valeurs sont présentées pour les trois matériaux de l’étude : l’aluminium, le GF/PA6 et le T700/PA66... 138
Figure 109 – Schéma illustrant le modèle équivalent en souplesse au regard du paramètre β selon la recommandation VDI 2230 (2003). ... 139
Figure 110 – Calcul du facteur d’introduction de charge β selon la recommandation VDI 2230 (2003). . 140
Figure 111 – Schéma illustrant le modèle équivalent en souplesse correctif proposé afin de s’affranchir du paramètre β. ... 140
Figure 112 – Exemples de résultats pour le cas d’un assemblage de pièces de même module de Young (E = 69 GPa). ... 142
Figure 113 – Exemples de résultats pour le cas d’un assemblage multimatériau métal/composite par exemple (E = 69 GPa et E3 = 5 GPa). Les pièces en composites sont représentées par les zones hachurées en rouge... 143
Figure 114 – Géométrie et notations utilisées – cas d’un chargement axial sur assemblage boulonné centré. ... 160
Figure 115 - Dimensions LVDT WI/5 mm - T. ... 164
Figure 116 - Raccordement pour l'amplificateur de mesure HBM AE 501... 164
Figure 117 - Photo du câblage d'un capteur LVDT au clip AE501. ... 166
Figure 118 - Courbes d'étalonnage des capteurs LVDT WI 5 mm. ... 168
Figure 119 - Ecarts de linéarité des LVDT WI 5 mm. ... 168
On considère le problème 1D de la Figure 120 (a) : une barre de longueur L et de section S est encastrée en et soumise à un effort de traction F en . Cette barre est constituée d'un premier matériau de module d'Young E1 pour , et d'un second matériau de module d'Young E2 pour . La solution analytique u en déplacement de ce problème s'écrit : ... 169
Figure 121 - Illustration de la méthode X-FEM sur un cas 1D : barre en traction en bi-matériau. ... 169
Figure 122 - Solution du problème de la barre en traction en bi-matériau par la méthode E.F. En rouge : maillage ne tenant pas compte de l'interface. En vert : maillage considérant une interface. ... 170
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 20
INTRODUCTION GENERALE
Les matériaux composites autorisent et favorisent la créativité au profit de la compétitivité. Designers, ingénieurs et industriels profitent depuis des décennies des nombreuses opportunités associées à cette catégorie de matériaux qui permet des associations de fonctions, de formes et de pièces. L’expansion progressive et significative des matériaux composites dans l’industrie aéronautique et automobile confirme d’ailleurs cette dynamique (Figure 1). Cependant, cette transition implique la création d’une nouvelle génération de structures multimatériaux. La combinaison de matériaux métalliques et composites favorise l’allègement des structures ce qui conduit généralement à des économies budgétaires sur le long terme. En revanche, la conception des assemblages multimatériaux reste complexe et est directement associée à des problématiques de mise en œuvre et de tenue en service.
Pour faire face à ces enjeux industriels et challenges technologiques, une multitude de procédés d’assemblage a été développée ou plus simplement transposée à partir des assemblages métalliques. A titre non exhaustif ces assemblages peuvent être classifiés selon trois catégories : les liaisons mécaniques et les liaisons collées, bien souvent majoritaires au sein des structures. En complément, il existe également des liaisons thermiques adaptées aux assemblages qui sont faiblement sollicités mécaniquement (Figure 4). Les sollicitations mécaniques dans le composite sont spécifiques selon la technique d’assemblage employée. Des endommagements caractéristiques comme la fissuration matricielle, le micro-flambement des fibres ou le délaminage génèrent pour les matériaux composites un comportement fortement non-linéaire.
Figure 1 - Exemple des secteurs industriels et des applications qui nécessitent l’emploi des matériaux composites : (a) l’automobile (BMW série 7), (b) l’aéronautique (A350), (c) l’énergie (l’éolien) et (d) le sport (fauteuil roulant de
l’U.S. Paralympic Track & Field Team).
La gestion des interfaces est également une thématique de travail majeure. Ces plans de joints sont associés à des mécanismes de transferts de charge très souvent complexes. Dans le cas des assemblages boulonnés, les effets du frottement, de la dilatation thermique, du fluage ou plus largement de la dégradation du stratifié vont conduire à une perte des bénéfices liés à la précharge et sont donc à considérer.
(a)
(b)
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 21 Figure 2 – Illustration de techniques d’assemblage multimatériaux.
Le Chapitre I présente un état de l’art des techniques d’assemblage adaptées aux matériaux composites. Nous détaillerons les procédés les plus répandus dans l’industrie à savoir le collage, le rivetage et préférentiellement le boulonnage, sujet de cette thèse. Une brève introduction aux liaisons innovantes propres aux matériaux composites est également traitée. La seconde partie du chapitre présente en détail les modèles analytiques de dimensionnement dédiés aux assemblages rivetés et boulonnés. Sachant que ces modèles ont été établis pour les matériaux métalliques, nous présentons une analyse critique de ces derniers quant à leurs emplois et leurs pertinences dans le cadre des matériaux composites.
Le Chapitre II porte sur l’étude et la détermination des propriétés mécaniques élastiques des stratifiés T700/PA66 et GF/PA6. La caractérisation mécanique dans le plan a lieu à l’échelle du pli élémentaire du stratifié via des essais classiques de traction quasi-statique. En ce qui concerne la caractérisation mécanique hors plan des composites, nous présentons successivement trois techniques expérimentales : la corrélation d’images, la mesure de déplacement via un dispositif LVDT, puis la détermination des modules élastiques par l’intermédiaire du Contrôle Non Destructif (CND) ultrasonore. Ces procédures expérimentales s’avéreront limitées à des épaisseurs supérieures à celle du pli élémentaire. Afin de compléter ce travail, nous proposons à la fin de ce chapitre un modèle éléments finis 3D du Volume Elémentaire Représentatif (VER). Cette alternative numérique vient compléter les résultats expérimentaux.
Le Chapitre III se concentre sur des analyses expérimentales et numériques autour du comportement hors plan de liaisons boulonnées intégrant des substrats en composites thermoplastiques. Un premier travail de caractérisation des souplesses des pièces est présenté. En concomitance de ces résultats expérimentaux, nous proposons une solution numérique sur la base d’un critère énergétique. L’introduction de deux paramètres analytiques à savoir le coefficient de filtrage et le facteur d’introduction de charge sont dans un second temps étudiés. Des limitations quant aux modèles analytiques existants sont mises en évidence par le biais de ces résultats. Ce travail aboutit sur une proposition de correction des formulations analytiques actuelles de façon à adapter ces modèles aux matériaux composites.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 22
CHAPITRE I : ETUDES BIBLIOGRAPHIQUES
ASSEMBLAGES COMPOSITES ET COMPORTEMENT HORS PLAN
DES LIAISONS BOULONNEES
ans ce chapitre nous dressons un état de l’art des techniques d’assemblage adaptées aux matériaux composites. Initialement, nous détaillerons les procédés les plus répandus dans l’industrie à savoir le collage, le rivetage et préférentiellement le boulonnage, sujet de cette thèse. Une brève introduction aux liaisons innovantes propres aux matériaux composites est également traitée. La seconde partie du chapitre présente en détail les modèles analytiques de dimensionnement dédiés aux assemblages rivetés et boulonnés. Historiquement, ces modèles ont été établis pour les matériaux métalliques, nous présentons une analyse critique de ces modèles quant à leurs emplois et leurs limites dans le cadre des matériaux composites.
Table des matières
1 Partie A : Etat de l’art des techniques d’assemblage des composites...24 1.1 Le collage structural appliqué aux composites...24 1.1.1 Problématiques mécaniques autour des assemblages composites collés et leurs limites ...25 1.1.2 Synthèse des joints collés ...29 1.2 Exemples de liaisons innovantes dédiées aux assemblages composites et limitations dans le cas de chargements hors plan ...29 1.2.1 Le Z-pinning ...29 1.2.2 Les pins CMT ...30 1.2.3 Le rivetage auto-poinçonneur...32 1.3 Conclusion ...33 2 Partie B : cas particulier des assemblages boulonnés/rivetés : comportement hors plan ...34 2.1 Introduction ...34 2.2 Les liaisons rivetées ...34 2.3 Les liaisons boulonnées ...36 2.3.1 Définition de la notion de précharge ...36 2.3.2 Les intérêts de la précharge – cas des assemblages boulonnés composites ...37
D
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 23 2.3.3 Introduction au serrage et aux techniques usuelles répertoriées ...38 2.4 Les types d’assemblages boulonnés et les modes de sollicitations ...39 2.5 Les modes de rupture des assemblages composites boulonnés ...40 2.5.1 Cas particulier de la rupture par matage ...42 2.6 Dimensionnement et modèles analytiques actuels des liaisons boulonnées soumises à un chargement axial ...47 2.6.1 Modèle de Rasmussen (1978) ...47 2.6.2 Modèle VDI 2230 (1986) ...48 2.6.3 Modèle de N’Guyen (1989) ...50 2.6.4 Modèle de Massol (1994) ...51 2.6.5 Modèle VDI 2230 (2003) ...52 2.6.6 Modèle d’Alkatan (2005) ...55 2.7 Synthèse et choix de l’orientation des travaux ...57
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 24
1 Partie A : Etat de l’art des techniques d’assemblage des composites
1.1 Le collage structural appliqué aux composites
L’assemblage de structures dans le domaine des transports, en particulier dans l’aéronautique, utilise fréquemment des solutions d’assemblages par collage. Ces liaisons constituées de joints d’adhésif permettent d’assembler deux pièces, le plus souvent de même nature, métal/métal (Kuczmaszewski, 2006), composite/composite, et plus communément des solutions hybrides collées/rivetées dans le cas de liaisons composite/métal. Associé aux dynamiques environnementales (Norme ISO, 2007), ce secteur s’attache à privilégier progressivement les structures métalliques par des structures composites.
Voici une liste non exhaustive des principaux avantages attribués au collage dans le cas des assemblages composites (Cognard, 2003) :
Cette technique permet d’éviter toute opération d’usinage, tâche potentiellement endommageante pour les stratifiés (perçage, échauffement), et évite l’apport de matière additionnelle, donc de poids supplémentaire au sein de la structure.
Le collage favorise également une répartition homogène des contraintes au niveau de l’interface a contrario des assemblages nécessitant des rivets ou des boulons.
Une liaison collée continue a une bonne tenue en fatigue du fait des propriétés intrinsèques de la colle.
Un joint de colle absorbe les vibrations et les chocs et n’est pas altéré par des phénomènes corrosifs.
Compte tenu de la continuité mécanique et morphologique de ce type de liaison, un joint collé favorise l’étanchéité de la structure.
Solution d’assemblage économique, comme en témoigne son usage très rependu dans l’industrie.
Le collage a également des inconvénients :
Absence de possibilité de démontage une fois la liaison établie.
L’état des surfaces mises en jeu dans une liaison collée est primordial. Suite à cela, un traitement de surfaces chimiques ou mécaniques est bien souvent nécessaire pour modifier la rugosité afin de maximiser les surfaces de contact et les énergies libres de surface.
Sensibilité notable à l’environnement : eau, humidité, chaleur, etc.
La réalisation d’un contrôle non destructif sur ce type de liaison n’est pas triviale. Les méthodes de contrôle ultrasonores sont basées essentiellement sur le principe d’une interaction onde/matière. La propagation des ondes ultrasonores est tributaire du support matériel. Dans le cas par exemple d’un assemblage collé métal/composite, la différence des propriétés mécaniques de ces deux matériaux, d’un côté homogène et isotrope (métal) de l’autre hétérogène et anisotrope (composite) pénalise la propagation de l’onde et in fine la qualité du signal.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 25 Du côté du chargement mécanique, les sollicitations en cisaillement sont à privilégier, le pelage est
à éviter.
La qualité du collage dépend de nombreux paramètres, comme les conditions de mise en œuvre, de réticulation, des propriétés mécaniques et physico-chimiques de surface ou de volume de l’adhésif aussi bien que des substrats. Appréhender le phénomène d’adhésion nécessite donc de faire appel à plusieurs domaines scientifiques à savoir, la mécanique, la chimie et des aspects physico-chimiques.
Dans le cadre de cette thèse nous nous intéressons au comportement de ces liaisons collées et aux limitations de celles-ci, qu’elles soient mécaniques lors de sollicitations hors plan ou environnementales. Les paragraphes qui suivent abordent succinctement ces problématiques liées aux assemblages composites collés.
1.1.1 Problématiques mécaniques autour des assemblages composites collés et leurs limites La résistance d’un joint collé s’évalue et se limite à l’élément le plus faible de la liaison collée. Dans le cadre des assemblages composites, cet élément peut être le joint adhésif, l’un des substrats ou encore l’interface entre le substrat et l’adhésif. Dans le cadre d’une forte adhésion entre le joint de colle et le substrat, la rupture de l’assemblage se localise dans l’épaisseur de l’adhésif ou dans le substrat, pour le premier cas, il s’agit d’une rupture dite cohésive. En revanche, une rupture initiée et localisée à l’interface est dite interfaciale. En service, il est commun de rencontrer dans le cadre des assemblages composites collés des ruptures qualifiées de mixtes. On observe une initiation de la rupture dans l’épaisseur du joint adhésif (rupture cohésive) puis sous l’action des contraintes externes, mécaniques, environnementales ou thermiques, cette rupture se propage à l’interface (rupture interfaciale).
Une problématique des joints collés concerne les transferts thermiques mis en jeu au sein de ces assemblages. Il est admis qu’en service, ces liaisons adhésives sont confrontées à des plages de température importante allant parfois de -100°C à +100°C. Or aujourd’hui, il existe des joints adhésifs structuraux efficaces répondant aux exigences liées aux basses températures (-100°C) ou aux hautes températures (200°C). Cependant aujourd’hui, les adhésifs structuraux performants à basses et hautes températures et répondant aux contraintes spécifiques de ces environnements opposés sont quasi inexistants.
1.1.1.1 Modèles analytiques des joints adhésifs
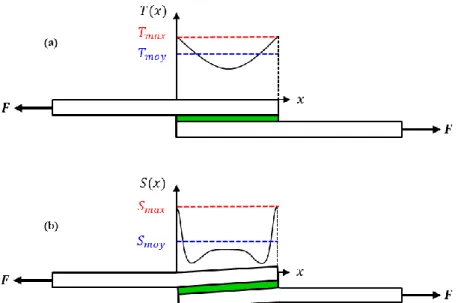
Historiquement, les premiers travaux théoriques traitant du comportement mécanique des joints collés ont été établis par (Volkersen, 1938) et (Goland & Reissner, 1944). Volkersen s’est intéressé aux concentrations de contraintes et leurs localisations, dans le cadre d’analyses uniaxiales. Celles-ci sont bien plus importantes sur les extrémités de l’assemblage. Dans cette étude, il est aussi noté que les contraintes de cisaillement sont réparties symétriquement par rapport à un axe passant par le centre du montage. Ces travaux ont été complétés par Goland et Reissner, via des analyses biaxiales. Ces auteurs ont approfondi l’étude précédente en considérant la rotation des substrats et du joint. La non colinéarité des efforts impliqués dans le cadre d’un joint collé simple recouvrement entraîne inévitablement un moment de
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 26 flexion, responsable des contraintes de pelage qui viennent s’ajouter aux contraintes de cisaillement (Figure 3). Ces contraintes de pelage se positionnent de manière analogue aux contraintes de cisaillement, réparties de façon symétrique.
Figure 3 - Représentation schématique de la répartition des contraintes de cisaillement (a) et des contraintes de pelage (b) : cas d'un assemblage collé simple recouvrement.
Exemple de modèle analytique d’un joint adhésif ; Modèle de Goland et Reissner :
Dans ce modèle, ces auteurs supposent l’adhésif et les substrats parfaitement élastiques. Ils supposent la profondeur grande devant les épaisseurs des substrats, de sorte qu’ils considèrent un problème de déformations planes. Ils définissent un facteur de moment fléchissant et un facteur de force qui
relient respectivement le moment de flexion et l’effort tranchant en fin de recouvrement, à la charge de traction appliquée à l’assemblage afin de tenir compte de la flexibilité des substrats et de l’adhésif.
Avec (1.1)
Et (1.2)
Ces travaux se concluent par la formulation suivante des contraintes de cisaillement et de pelage : [ ( ) ( ) ] (1.3) Avec (1.4)
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 27 [ ( ) ( ) ( ) ( ) ] (1.5) Où ( √ ) (1.6)
Les contraintes maximales de cisaillement et de pelage se localisent (Figure 3) aux extrémités
du joint de colle et ont comme expressions dans le cas de ce modèle :
(
)
(puisque ) (1.7)
Et
(1.8)
Dans le cas de substrats indéformables , la contrainte de cisaillement maximale est deux fois
plus importante que la valeur prévue par Volkersen, d’où l’importance de tenir compte de la rotation du joint (efforts hors plan). Depuis ces premiers modèles analytiques, une multitude de déclinaisons ont été proposées. Un rappel chronologique des principales contributions de modèles analytiques des joints adhésifs est proposé dans le paragraphe qui suit.
(Hart-Smith, 1973) propose des solutions analytiques qui intègrent des effets thermiques et non linéaires de l’adhésif liés au déséquilibre de rigidité. Il a développé une approche élastique-plastique parfaite (Figure 4).
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 28 (Oplinger, 1994) intègre l’hypothèse des grands déplacements dans le cas purement élastique pour des liaisons équilibrées.
(Tsaï & Morton, 1994) incluent les grands débattements du joint et l’influence qui en découle sur le calcul des moments en bord de joint. Une analyse globale d’une jonction collée est proposée par (Crocombe & Bigwood, 1989). Ce travail couvre tous types de configurations géométriques en considérant la liaison en deux sandwichs substrats-adhésifs sollicitée via un chargement complexe (tension, effort tranchant et moment de flexion). (Smeltzer & Klant, 2003) ont développé un modèle analytique qui s’applique dans le cas de substrats non isotropes et des adhésifs non élastiques.
Ces quelques lignes dressent un aperçu non exhaustif des modèles analytiques dédiés aux liaisons adhésives. Un travail bibliographique conséquent à ce sujet est détaillé dans la thèse de (Paroissien E. , 2007). Cette thèse porte sur les jonctions Hybrides Boulonnés Collés (joints HBC).
1.1.1.2 Modèles numériques des joints collés composites
Différentes approches classiques permettent l'étude de l'amorçage d'un décollement : l'application d'un critère de rupture, l'utilisation d'un critère couplé, et des approches basées sur la mécanique de l'endommagement. Le bilan des avantages et des limitations de ces différentes approches afin de modéliser l’amorçage du décollement dans une structure tridimensionnelle en présence de phénomènes non-linéaires et l’intérêt des Modèles de Zone Cohésive (MZC) est présenté dans (Satthumnuwong, 2011).
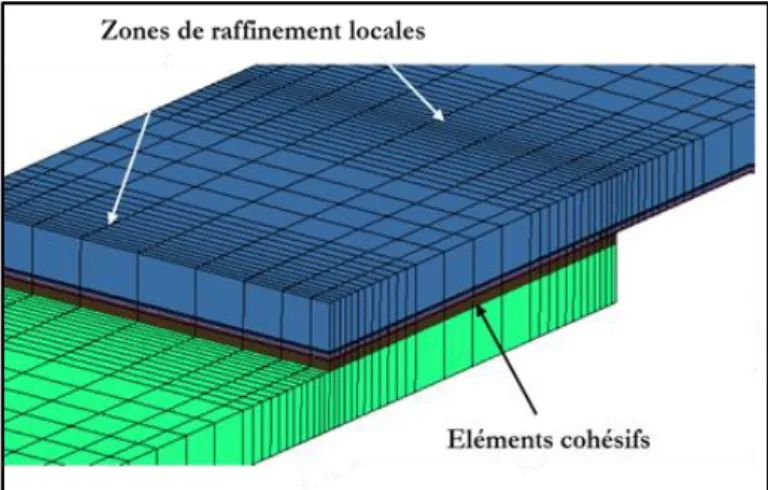
Figure 5 - Modélisation 3D d'une liaison adhésive simple recouvrement appliquée à des substrats composites (Satthumnuwong, 2011).
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 29 1.1.2 Synthèse des joints collés
Les travaux répertoriés dans la littérature sur les joints collés sont abondants. Deux raisons peuvent être avancées pour expliquer cet engouement, la facilité de mise en œuvre et conjointement leur large emploi dans l’industrie. Néanmoins, la conception de ces liaisons reste un secteur de recherche actuel, notamment dans le cadre des assemblages multimatériaux (métal/composite) mais également des liaisons hybrides associant cette technologie et d’autres liaisons mécaniques comme par exemple les boulons ou les rivets. L’utilisation de Joint Simple ou Double Recouvrement (JSR ou JDR) est cependant limitée de par leurs contraintes mécaniques (cisaillement et pelage) mais également d’un point de vue thermique ou encore en termes de durabilité (Bordes, 2009). La déformation (Yu, 2006), la fissuration (Coppendale, 1977) puis la rupture (Adams, Comyn, & Wake, 1997) sont des effets directs de ces contraintes mécaniques, thermiques et hydriques.
1.2 Exemples de liaisons innovantes dédiées aux assemblages composites et
limitations dans le cas de chargements hors plan
Des technologies alternatives sont en cours de développement dans le cadre des assemblages composites ou plus largement des assemblages multimatériaux. Il s’agit de technologies pour la plupart en cours de perfectionnement. Leur maturité industrielle n’est donc a priori pas totale.
1.2.1 Le Z-pinning
Ce procédé constitue un outil de choix pour compléter des technologies d’assemblage plus classiques. Ce procédé innovant permet de renforcer mécaniquement des assemblages de stratifiés par des clous. Il est admis que ces matériaux et les liaisons de pièces en composite présentent des faiblesses du point de vue :
de la résistance aux chocs, de la tenue aux efforts hors plan,
des cohésions entre les couches composites et du délaminage.
Dans le cadre de fibres sèches, des solutions comme le tissage, la couture ou le tressage peuvent permettre de palier à ces problèmes. Le Z-pinning se positionne plutôt lorsqu’il s’agit de pré-imprégnés. Ce procédé consiste à introduire des clous métalliques ou en fibre de carbone de faibles diamètres (Ji, Kweon, & Choi, 2014) et (Cartié, Troulis, & Partridge, 2006). Cet ajout de matière renforce mécaniquement la structure. Cette technologie est illustrée sur la Figure 6.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 30 Elle est introduite dans les années 80 et publiée dans les travaux de (Tomashevskii, Sitnikov, Shalygin, & Yakovlev, 1989) et (Freitas, Magee, Boyce, & Bott, 1991) qui développent le procédé UAZ® (Ultrasonically Assisted Z-FibreTM). Une analyse approfondie sur ce sujet est proposée dans les travaux de (Mouritz, 2007).
Mécaniquement, le Z-Pinning permet :
d’accroitre de manière significative la résistance à rupture interlaminaire des composites, d’augmenter la résistance aux chocs,
d’améliorer la résistance à la propagation de fissure et de confiner le processus de rupture.
L’augmentation des propriétés hors plan liée à ce procédé est estimée à 50 %, a contrario il implique un abaissement des propriétés élastiques dans le plan de l’ordre de 5 %.
Figure 7 - (a) Photographies de Z-pins sollicités en mode I et (b) défauts créés par la présence des Z-pins (Pegorin, Pingkarawat, Daynes, & Mouritz, 2015). 1.2.2 Les pins CMT
Cette technologie est également assez récente et en cours de développement. Néanmoins, des publications scientifiques sont accessibles dans la littérature dont les travaux de (Ucsnik, Scheerer, Zaremba, & Pahr, 2010) cités dans de nombreux articles correspondant à ce sujet. Dans cette étude, le dépôt des fibres est effectué sur une plaque métallique, celle-ci est texturée de picots à tête sphérique et cylindrique. La résine quant à elle est directement polymérisée au contact du métal.
Figure 8 - Assemblage multimatériaux utilisant des picots pointes sollicités en traction (Joesbury, Ayre, Partridge, Colegrove, & Williams, 2011).
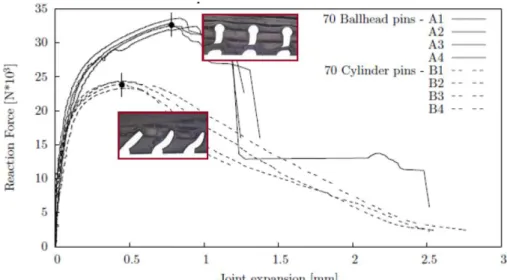
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 31 Ce type de liaison améliore fortement les performances de l’assemblage lors d’efforts de traction-cisaillement. Dans le cas des travaux de (Ucsnik, Scheerer, Zaremba, & Pahr, 2010) on constate une augmentation de 11 % pour les picots cylindriques et 53 % dans le cas des picots à tête sphérique.
Figure 9 - Illustration de l'amélioration à la tenue mécanique en traction des assemblages utilisant des pins CMT (Ucsnik, Scheerer, Zaremba, & Pahr, 2010).
Celle-ci retarde la décohésion entre les éléments de l’assemblage (effets hors plan) d’où cet écart avec la tenue mécanique des picots cylindriques. La rupture de la tige des picots à tête sphérique confirme cette limitation mécanique hors plan (Figure 9). D’autres études paramétriques sont investiguées. Elles confrontent la tenue mécanique de ces assemblages en fonction de la forme des picots (cylindriques, pointes ou à tête sphérique), de leur nombre et de la disposition des rangées. Toutefois, cette dernière n’est pas du premier ordre quant à la tenue mécanique de ces assemblages. Nous pouvons également citer les travaux de (Paroissien S. , 2016) qui a développé un modèle analytique et numérique en lien avec ces assemblages dans le cadre de liaisons métal/composite thermoplastique. Cette étude reprend les problématiques paramétriques exposées précédemment et intègre le comportement de l’interface CMT par le biais d’éléments cohésifs. Les sollicitations mécaniques ont lieu une nouvelle fois dans le plan de la liaison.
Figure 10 - Simulation numérique d’un assemblage métal/composite thermoplastique par CMT pins (Paroissien S. , 2016). L’image de droite indique l’évolution des contraintes de Von Mises au cours du chargement selon l’axe x.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 32 1.2.3 Le rivetage auto-poinçonneur
Il s’agit d’un procédé d’assemblage adapté aux hautes cadences et donc particulièrement utilisé dans l’industrie automobile. Cette technologie est traditionnellement cumulée au collage (Sadowski, Kneć, & Golewski, 2010), (Di Franco & Zuccarello, 2014). L’association de ces deux procédés d’assemblage augmente la tenue mécanique de l’assemblage. La liaison mécanique rivetée permet de mettre en place les pièces à assembler pendant que la colle termine de réticuler afin d’acquérir ses propriétés mécaniques finales. Mécaniquement, le rivetage auto-poinçonneur est avantageux car :
il est simple et rapide à mettre en œuvre,
associé à un joint adhésif, il augmente significativement la résistance en cisaillement et en fatigue de la liaison (Sun, Stephens, & Khaleel, 2007),
il induit peu de contraintes thermiques puisque la procédure est effectuée à froid.
Figure 11 – (a) Distribution de la dureté le long d’une jambe d’un rivet dans un assemblage multimatériaux (Liu, 2016). (b) Simulation du procédé de rivetage auto-poinçonneur (LS-DYNA, 2013).
Néanmoins, ce procédé d’assemblage présente certaines limitations (He, Pearson, & Young, 2008) relatives :
aux conditions de mise en œuvre qui sont à revoir pour les matériaux composites, aux limitations géométriques des pièces à assembler (épaisseurs minces),
Le montage est unilatéral et non démontable et un accès de part et d’autre de la structure est nécessaire.
Le lecteur pourra se reporter aux travaux de (Gay A. , 2015) pour une analyse approfondie sur cette thématique. Ces travaux de thèse traitent de la tenue mécanique de ces liaisons dans le cadre d’assemblage multimatériaux (composite/métal).
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 33
1.3 Conclusion
Cette première partie bibliographique a permis de dresser un état de l’art des différentes technologies d’assemblage adaptées aux matériaux composites et aux solutions hybrides métal/composite. Cette vue d’ensemble présente une technique maîtrisée telle que le collage, et des technologies d’assemblage plus innovantes comme par exemple la technique des Pins CMT. Un accent est mis au niveau de la tenue mécanique de ces assemblages et leurs limitations quant à d’éventuels usages lors de sollicitations hors plan. En effet, la majorité de ces assemblages répond pleinement aux exigences de tenues mécaniques dans le plan et en cisaillement. Par conséquent, l’utilisation des liaisons rivetées et/ou boulonnés pour les matériaux composites et les assemblages hybrides métal/composite semble incontournable. Fort de ce constat, nous investiguons naturellement ces solutions d’assemblage dans la seconde partie de ce chapitre, en particulier pour des sollicitations mécaniques hors plan.
Pour rappel, un des objectifs de ces travaux de thèse est d’identifier les faiblesses des modèles analytiques de dimensionnement des liaisons boulonnées dans le cadre de leurs usages pour des assemblages composites. Dès lors, nous détaillons en particulier les modèles considérés comme référents dans ce domaine.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 34
2 Partie B : cas particulier des assemblages boulonnés/rivetés : comportement
hors plan
2.1 Introduction
Les assemblages boulonnés sont sans aucun doute les systèmes de liaisons les plus utilisés en mécanique (Souvignet & Brand, 1987). Compte tenu de leur nombre et de leur importance dans la construction mécanique, ils représentent un enjeu économique certain. Le talon d’Achille de ces liaisons mécaniques concerne leur résistance en fatigue qui est intrinsèquement faible MPa. En revanche la résistance en statique à rupture des boulons type HR (Haute Résistance) est très élevée ( MPa). De ce fait, il est donc nécessaire pour le concepteur d’être prudent dans le dimensionnement de telles liaisons, particulièrement sur le choix de la classe de qualité du boulon. De nombreux modèles analytiques de dimensionnement des liaisons boulonnées ont été investigués, ces modèles sont détaillés dans le paragraphe 2.6. La bonne tenue d’un assemblage boulonné dépend de la valeur initiale de la précharge appliquée. Pour toute pièce mécanique, la réalisation de trous est un mal nécessaire pour assembler les éléments et former une structure, une opération réalisable directement lors de la conception des pièces par moulage ou à posteriori par perçage. Cette action intrusive et unilatérale affaiblit grandement les propriétés mécaniques initiales du matériau de l’ordre de 40 à 60 % en traction et 10 à 20 % en compression. Cette chute significative des propriétés mécaniques correspond aux concentrations de contraintes engendrées par la présence du trou.
2.2 Les liaisons rivetées
Les liaisons rivetées font parties de la catégorie des assemblages permanents1. Le rivetage à l’aveugle
permet d’assembler des pièces en particulier lorsqu’un seul côté est accessible. Ces assemblages rivetés sont conçus pour être sollicités dans le plan. Pour dimensionner ces liaisons hyperstatiques, le concepteur doit utiliser des hypothèses simplificatrices qui se doivent fidèles au comportement mécanique de ces assemblages.
Rivet ouvert Rivet multigrip Rivet étanche Rivet pétale Rivet éclaté
Polyvalent performance Haute l’étanchéité Assure Répartit la charge de serrage Dédié aux matières plastiques ou caoutchoutiques Tableau 1 – Exemples de liaisons rivetées.
1 Assemblage permanent : type d’assemblage qui, pour sa désolidarisation, nécessite la destruction de la liaison ou
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 35 Dans le cas des liaisons rivetées celles-ci intègrent notamment (Gambelin, 2010) :
la condition de non matage entre les surfaces en contact des composants assemblés, les conditions de résistance (Reg) ou de non rupture en cisaillement (Rrg) des rivets,
la condition de non rupture en traction (Rr) des pièces assemblées.
Comme pour d’autres techniques d’assemblages, le dimensionnement de ces liaisons est fonction du domaine de travail de l’assemblage (élastique, plastique, etc.) ainsi que des pièces assemblées et du type de matériau utilisé (ductile, fragile, etc.).
Figure 12 - Représentations schématiques d’un assemblage composé de trois rivets sollicités en traction et de la déformation élastique mise en jeu en fonction des souplesses des pièces et des rivets (Gambelin, 2010).
A partir des déformées de la Figure 12, nous pouvons observer dans le domaine élastique que : a) la répartition des efforts dans les rivets n’est pas équitable,
b) et d) une répartition égale des efforts dans les rivets situés aux extrémités de l’assemblage est possible avec un effort nul dans le rivet médian, en fonction des souplesses des pièces ou encore dans le cas d’un assemblage parfaitement monolithique.
(c) enfin, en présence de rivets souples, on remarque une bonne répartition des efforts sur l’ensemble des points de fixation.
Romain HAMONOU – Institut de Recherche en Génie Civil et Mécanique – Ecole Centrale de Nantes 36
2.3 Les liaisons boulonnées
Les liaisons boulonnées peuvent travailler en cisaillement comme les rivets mais également en traction (hors-plan). De plus, ces fixations rendent possible l’introduction d’une précharge axiale, parfois élevée, ce qui est plus difficilement envisageable avec les liaisons rivetées. Enfin, il s’agit d’une technique d’assemblage qui se veut démontable en opposition aux rivets qui possèdent un caractère permanent.
Figure 13 - Représentation schématique illustrant les différences de comportement d'un rivet et d'un boulon dans le cas d'un chargement axial centré.
2.3.1 Définition de la notion de précharge
Lors du montage d'un boulon, en général, un couple moteur de serrage est appliqué. Celui-ci va entraîner un effort de tension dans le boulon, ou assimilé (goujon, vis, etc.). Par réciprocité, un effort de compression identique se répercute dans les pièces assemblées. Cette précharge notée sur le Figure 13 est associée à un effort extérieur nul au niveau de l’assemblage.