Ecole Nationale Sup´ ´ erieure de l’A´ eronautique et de l’Espace D´ epartement ´ Energ´ etique et Propulsion
Equilibre radial : ´
Application au calcul d’´ etages de turbomachines
J. Gressier Mai 2002
Le calcul des ´ ecoulements dans les turbomachines est fort complexe. En effet, la prise en compte de tous les ph´ enom` enes, sans hypoth` ese particuli` ere, nous obligerait ` a consid´ erer des
´ ecoulements tridimensionnels instationnaires visqueux. Le caract` ere instationnaire est princi- palement dˆ u aux interactions rotor/stator (compresseur/redresseur ou distributeur/turbine).
Mais il existe aussi les interactions pales/carter et des ´ eventuelles distorsions amont.
La premi` ere hypoth` ese simplificatrice est de consid´ erer un ´ ecoulement moyen “´ equivalent”
stationnaire. On peut alors penser que celui-ci est axisym´ etrique, pour autant que les conditions amont le soient aussi (pas d’effet de distorsion). Il suffit ensuite de calculer l’´ ecoulement dans un plan m´ eridien du corps. N´ eanmoins, cette approche n´ ecessite un certain nombre de donn´ ees, que seul le calcul de l’´ ecoulement inter-aubes peut donner (d´ eviation, perte de pression g´ en´ eratrice, etc). L’approche doit donc n´ ecessairement ˆ etre coupl´ ee : un calcul dans un plan m´ eridien qui d´ efinit les surfaces de courant ´ equilibr´ ees, et un certain nombre de calculs aube ` a aube pour chacune de ces surfaces ´ equilibr´ ees.
Dans cet esprit, nous nous int´ eressons ` a l’´ equilibre radial. Il s’agit d’extraire une ´ equation d’´ equilibre, plan par plan dans une surface m´ eridienne, qui permet de calculer l’orientation des tubes de courant dans la turbomachine. Apr` es un bref rappel sur les ´ equations en rep` ere absolu et en rep` ere tournant, les ´ equations seront d´ etaill´ ees pour un rep` ere axisym´ etrique. Puis, la m´ ethode d’obtention de l’´ equilibre radial sera donn´ ee pour ensuite pouvoir s’attarder sur les applications possibles.
1 Equations d’Euler en rep` ´ ere absolu et rep` ere tournant
Lorsque les effets de viscosit´ e et de conduction thermique sont n´ egligeables, les ´ equations de Navier-Stokes se simplifient et deviennent les ´ equations d’Euler. Ces ´ equations sont ´ etablies sous forme conservative. Peu adapt´ ee ` a la manipulation d’´ equations, cette forme est pourtant
`
a la base de toute m´ ethode conservative (m´ ethode volumes finis, approche avec bilans, etc). La forme compacte est :
∂
∂t
ρ ρ~ V ρE
+ div
ρ~ V T ρ~ V ⊗ V ~ + p~~I
ρ~ V T H
= 0 ( 1)
o` u E et H sont respectivement l’´ energie massique totale et de l’enthalpie d’arrˆ et. On rappelle les relations
ρE = ρe + 1
2 ρ~ V 2 = p γ − 1 + 1
2 ρ~ V 2 ( 2a)
ρH = ρE + p = γp γ − 1 + 1
2 ρ~ V 2 ( 2b)
o` u e = C v T est l’´ energie interne massique. On a bien sˆ ur H = h + 1/2ρ~ V 2 avec ρh = ρe + p et h l’enthalpie massique.
Dans ces relations, on utilise implicitement une relation de fermeture qui est une ´ equation d’´ etat du fluide, p = (γ −1)ρe, par exemple. Elle permet de relier la pression aux autres variables thermodynamiques. On peut aussi l’´ ecrire
p = ρ rT ( 2c)
avec r = 287.14 J·kg −1 ·K −1 .
Ces ´ equations peuvent aussi s’´ ecrire sous forme non conservative. Ce ne sont plus des
´ equations de bilan ; le choix des variables est quasiment arbitraire et c’est pourquoi il en existe de nombreuses variantes. Dans la plupart des cas, l’obtention d’une forme non conservative se fait en d´ eveloppant la forme conservative, et en simplifiant certains termes ` a l’aide de l’´ equation de continuit´ e. Une des formes classiquement rencontr´ ees est la suivante :
∂ρ
∂t + divρ~ V = 0 ( 3a)
∂ ~ V
∂t + − →
rot V ~ ∧ V ~ + −−→
grad V ~ 2
2 = − 1
ρ
−−→ gradp ( 3b)
dH
dt = ∂H
∂t + −−→
gradH · V ~ = ∂p
∂t ( 3c)
Notons que l’´ equation d’´ energie peut ˆ etre remplac´ ee par une ´ equation pour l’entropie S, dS/dt = 0. Cette ´ equation signifie la conservation de la variable sur une trajectoire (ou sur une ligne de courant en ´ ecoulement stationnaire).
Pour obtenir les ´ equations d’Euler dans un rep` ere tournant, d´ efini par un vecteur rotation
~
ω, il suffit de d´ evelopper ces mˆ emes ´ equations ` a l’aide de V ~ = ~ ω ∧ −−→
OM + W ~ ( 4)
o` u W ~ est la vitesse relative dans le rep` ere tournant. Il n’est nul besoin d’ajouter les termes d’inertie (acc´ el´ eration d’entraˆınement et acc´ el´ eration de Coriolis) : les d´ eriv´ ees particulaires des membres de gauche les feront naturellement apparaˆıtre. Par contre, le rep` ere tournant est choisi tel que l’´ ecoulement relatif soit stationnaire.
Notons que les op´ erateurs diff´ erentiels div et −−→
grad ne sont pas identiques dans le rep` ere absolu et dans le rep` ere relatif. Leurs formulations d´ ependent du syst` eme de coordonn´ ees utilis´ e.
Nous garderons les notations identiques par souci de simplicit´ e.
2 Formulation du probl` eme en rep` ere axisym´ etrique
Nous pouvons consid´ erer cette section comme un pr´ ealable math´ ematique ` a l’´ etablissement
de l’´ equation d’´ equilibre radial. Nous allons d´ etailler la formulation des ´ equations dans le rep` ere
axisym´ etrique ( u ~ x , ~ u r , ~ u θ ). L’´ equation de quantit´ e de mouvement s’´ ecrit, dans le rep` ere relatif,
∂ ~ W
∂t + − →
rot W ~ ∧ W ~ + −−→
grad W ~ 2 2
| {z }
acc´ el´ eration relative
= ω 2 ~ r
| {z } acc´ el´ eration d’entraˆınement
− 2~ ω ∧ W ~
| {z } acc´ el´ eration
de Coriolis
− 1 ρ
−−→ gradp
| {z } bilan des efforts
volumiques
( 5)
Les relations qui suivent vont ˆ etre d´ evelopp´ ees dans le rep` ere absolu. On retiendra qu’il suffit de remplacer les vitesses par la relation ( 4 ) pour obtenir l’´ equation dans le rep` ere relatif.
L’´ equilibre radial s’´ ecrit dans un plan m´ eridien de la g´ eom´ etrie axisym´ etrique. C’est pour- quoi nous d´ etaillons ici quelques notations propres au calcul dans ce plan m´ eridien. L’angle
x r
θ V r
α ϕ V θ
V
Vx
m V
α m
x r
s Rm
ϕ ϕ
Fig. 1 – Notations associ´ ee ` a une trajectoire dans un rep` ere axisym´ etrique
α est l’angle de d´ eviation absolu dans le plan azimuthal. On d´ efinit aussi l’angle de d´ eviation α m dans la plan de la nappe de courant (voir figure 1). Le changement de rep` ere agit sur la vitesse orthoradiale V θ . Ainsi, il est n´ ecessaire de d´ efinir deux angles de d´ eviation, l’un absolu appliqu´ e ` a V ~ , l’autre relatif appliqu´ e ` a W ~ . On choisit les notations α et β pour les vitesses respectivement absolues et relatives.
Les relations de projections entre V , V θ , V m , V r , V x sont simples ` a retrouver. Citons par exemple :
V m = V cos(α m ) ( 6a)
V x = V m cos(ϕ) ( 6b)
V r = V m sin(ϕ) ( 6c)
V θ = V sin(α m ) ( 6d)
On pourrait ˆ etre tenter d’utiliser la d´ eviation α dans le plan projet´ e. La d´ eviation α m dans le plan de la nappe de courant axisym´ etrique a cependant plus de signification physique. En particulier, α m garde sa signification lorsque l’angle de conicit´ e ϕ tend vers 90 o . Ces angles sont reli´ es par
tan(α m ) = tan(α) cos(ϕ) ( 7)
Par contre, nous d´ etaillons ci-dessous les relations entre les d´ eriv´ ees de ϕ selon x, r et l’abscisse curviligne s, elle-mˆ eme reli´ ee au rayon de courbure de la trajectoire, dans la surface m´ eridienne.
Ces relations sont :
ds = R m dϕ et dx = cos ϕ ds = ⇒ C m = 1
R m = dϕ
ds ( 8a)
dϕ dx = ∂ϕ
∂x + tan ϕ ∂ϕ
∂r = C m
cos ϕ ( 8b)
3 Equation de l’´ ´ equilibre radial
Pour ´ etablir l’´ equation de l’´ equilibre radial, il faut chercher ` a ´ eliminer les d´ ependances selon l’axe x et arriver ` a une ´ equation qui ne fait intervenir que des d´ eriv´ ees radiales. Faisons d’abord
´ etat des hypoth` eses :
– le fluide est suppos´ e parfait (effet de viscosit´ e et de conduction thermique n´ egligeables), et le gaz id´ eal (gaz parfait et calorifiquement parfait),
– l’amont n’est pas n´ ecessairement homentropique car le fluide peut avoir subi des pertes de pression g´ en´ eratrice non homog` enes dans la direction radiale (selon la section ` a laquelle on s’int´ eresse),
– l’´ ecoulement est suppos´ e stationnaire,
– l’´ ecoulement est axisym´ etrique ; cela signifie que les quantit´ es ne d´ ependent pas de θ, mais uniquement de x et r. La vitesse orthoradiale V θ , elle, n’est pas forc´ ement, et mˆ eme rarement nulle.
Dans le cadre de ces hypoth` eses, on note que la d´ eriv´ ee particulaire s’exprime seulement sous la forme
d
dt = V ~ · −−→
grad = V x ∂
∂x + V r ∂
∂r = V x ∂
∂x + tan ϕ ∂
∂r
!
( 9)
3.1 Equation de continuit´ ´ e
Le d´ eveloppement de l’´ equation de continuit´ e donne V ~ · −−→
gradρ + ρ div V ~ = 0 ( 10)
A partir de l’´ ` ecriture diff´ erentielle de la fonction d’´ etat p = p(ρ, S) et de la d´ efinition de la vitesse du son, on peut ´ ecrire
−−→ gradp = a 2 −−→
gradρ + ∂p
∂S
!
ρ
−−→ gradS ( 11a)
En effectuant le produit scalaire par V ~ , et en utilisant le fait que l’entropie se conserve sur une ligne de courant ( V ~ · −−→
gradS = 0), on obtient V ~ · −−→
gradρ = 1 a 2
V ~ · −−→
gradp ( 11b)
Sous ces hypoth` eses, l’´ equation de continuit´ e devient alors V ~ · −−→
gradp + ρa 2 div V ~ = 0 ( 12)
On d´ eveloppe V ~ · −−→
gradp en ´ eliminant le gradient de pression longitudinal ` a l’aide de l’´ equation de quantit´ e de mouvement longitudinale
∂p
∂x + ρ dV x
dt = 0 ( 13a)
On obtient
V ~ · −−→
gradp = −ρV x dV x
dt + V r ∂p
∂r ( 13b)
que l’on peut substituer dans l’´ equation de continuit´ e ( 12 ) :
−ρV x
dV x dt + V r
∂p
∂r
!
+ ρa 2 ∂V x
∂x + ∂V r
∂r + V r r
!
= 0 ( 14a)
En d´ eveloppant quasiment tous les termes V r en V x tan ϕ, on voit apparaˆıtre des combinaisons
´ egales ` a dV x /dt, et l’´ equation de continuit´ e modifi´ ee devient
1 − M x 2 dV x
dt + M x 2 tan ϕ ρ
∂p
∂r + V x 2 ∂ tan ϕ
∂r + V r V x
r = 0 ( 14b)
avec M x = V x /a.
3.2 Equation de quantit´ ´ e de mouvement radiale L’´ equation de quantit´ e de mouvement radiale s’´ ecrit
1 ρ
∂p
∂r + dV r dt − V θ 2
r = 0 ( 15)
On peut aussi d´ evelopper, en utilisant l’expression de la d´ eriv´ ee particulaire ( 9 ), dV r
dt = tan ϕ dV x
dt + V x d tan ϕ
dt ( 16a)
= tan ϕ dV x
dt + V x cos 2 ϕ
dϕ
dt ( 16b)
= tan ϕ dV x
dt + V m 2
cos ϕ C m ( 16c)
On obtient l’´ equation de quantit´ e de mouvement radiale suivante : 1
ρ
∂p
∂r + tan ϕ dV x
dt + V m 2
cos ϕ C m − V θ 2
r = 0 ( 17)
3.3 Equation de l’´ ´ equilibre radial
Pour obtenir l’´ equation de l’´ equilibre radial, il suffit d’´ eliminer le terme dV x /dt entre l’´ equation de continuit´ e ( 14a ) et l’´ equation de quantit´ e de mouvement ( 17 ). On obtient alors
1 ρ
∂p
∂r
h 1 − M x 2 1 + tan 2 ϕ i + 1 − M x 2 V m 2
cos ϕ C m − V θ 2 r
!
− tan ϕ V x 2 ∂ tan ϕ
∂r + V x V r r
!
( 18a)
On peut r´ e´ ecrire cette ´ equation en remaniant quelques termes ; on obtient alors l’´ equation de l’´ equilibre radial, d´ ecrivant l’´ evolution du profil de pression statique dans une section en fonction de quantit´ es locales ou de d´ eriv´ ees partielles selon la mˆ eme section :
1 ρ
∂p
∂r
1 − M m 2 = 1 − M x 2 V θ 2 r
| {z } effet centrifuge
− 1 − M x 2 V m 2 cos ϕ C m
| {z }
effet de courbure
+ tan ϕV m 2 ∂ϕ
∂r + V r 2 r
| {z } effet de conicit´ e
( 18b)
o` u l’on peut, dans le second membre, donner la signification physique de chacun des termes. Il existe d’ailleurs l’´ equation de l’´ equilibre radial simplifi´ ee qui ne tient uniquement compte que du terme centrifuge. L’´ equation peut aussi se mettre sous forme sans dimension :
1 γp
∂p
∂r
1 − M m 2 = 1 − M x 2 M θ 2
r − M m 2 cos ϕ C m
!
+ tan ϕM m 2 ∂ϕ
∂r + M r 2
r ( 18c) Sous cette forme, l’´ equation ne fait intervenir que la pression statique et le nombre de Mach (ainsi que ses composantes). La donn´ ee de la pression d’arrˆ et suffit donc pour poser correctement le probl` eme de Cauchy et permettre l’int´ egration. En particulier, la temp´ erature d’arrˆ et n’est pas utile. Elle le devient lorsque l’on veut calculer, voire mˆ eme optimiser le d´ ebit dans la veine.
4 Applications
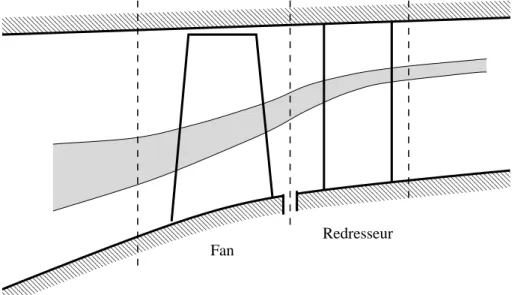
Les applications de l’´ equilibre radial sont multiples : v´ erifications de mesures exp´ erimentales, conception de turbomachines en utilisant le couplage avec des m´ ethodes de calcul du canal inter- aubes plus ou moins ´ elabor´ ees. On applique l’´ equation dans diff´ erentes sections de la veine, en amont et en aval de chaque roue comme cela est montr´ e sur la figure 2.
Fan
Redresseur