HAL Id: tel-01083651
https://tel.archives-ouvertes.fr/tel-01083651
Submitted on 17 Nov 2014HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
partir d’essais dynamiques
René Matias Calvente
To cite this version:
René Matias Calvente. Méthodologie de contrôle en place des micropieux à partir d’essais dynamiques. Autre [cond-mat.other]. Université Blaise Pascal - Clermont-Ferrand II, 2014. Français. �NNT : 2014CLF22471�. �tel-01083651�
EDSPIC
: 660
U
NIVERSITE
B
LAISE
P
ASCAL
- C
LERMONT
II
E
COLE
D
OCTORALE
S
CIENCES
P
OUR
L’I
NGENIEUR
D
E
C
LERMONT
-F
ERRAND
Thèse
Présenté par
René Matias CALVENTE
pour obtenir le grade de:
DOCTEUR D’UNIVERSITE
SPECIALITE : GENIE CIVIL
METHODOLOGIE DE CONTROLE EN PLACE DES
MICROPIEUX A PARTIR D’ESSAIS DYNAMIQUES
Soutenue publiquement le 30 Juin 2014 devant le jury :
M. Fabrice EMERIAULT,
Rapporteur - Président
M. Roger FRANK,
Rapporteur
Mme. Sofia Costa d’AGUIAR,
Examinateur
M. Philippe GOTTELAND,
Examinateur
M. Pierre BREUL,
Directeur
M. Claude BACCONNET,
Co-Directeur
M. Jean Paul VOLCKE,
Invité
M. Roland GOURVES,
Invité
Remerciements
Je tiens tout d'abord à remercier le directeur de cette thèse, M. Pierre BREUL pour sa confiance, sa disponibilité, ses conseils et le suivi de ce travail. Je remercie également M. Claude BACCONNET, mon co-directeur de thèse, ses connaissances scientifiques, sa disponibilité et son soutien m’ont aidé à avancer dans l’accomplissement de mon travail de recherche.
Ensuite, je voudrais remercier M. Roland GOURVES, président de la société Sol Solution, qui m’accueilli au sein de son entreprise et m’a permis de préparer une thèse de Doctorat. Son encouragement quotidien mos vraiment aidé dans les moments les plus difficiles.
Je tiens à remercier tout particulièrement M. Miguel BENZ NAVARRETE (Responsable Pôle Innovation à Sol Solution) pour avoir encadré et suivi ma thèse. Ses compétences scientifiques m’ont été d’une grande aide et ce travail n’aurait probablement jamais pu aboutir sans ces précieux conseils.
Je voudrais également adresser mes remerciements au Professeur Fabrice EMERIAULT (Laboratoire 3SR) de m’avoir fait l’honneur d’accepter de présider mon jury de thèse et le rôle de rapporteur, Professeur Roger FRANK (Laboratoire Navier, équipe géotechnique « CERMES ») d’avoir accepté d’être rapporteur de ce mémoire, ainsi que pour le temps qu’il m’a consacré en me recevant avant la soutenance. Je remercie également Mme. Sofia COSTA D’AGUIAR (SNCF) et M. Philippe GOTTELAND (FNTP) pour avoir accepté le rôle d'examinateur. Je les remercie pour avoir consacré du temps à la lecture de ce travail et pour les remarques constructives qu’ils mon adressées.
Je remercie tout l’équipe de Sol Solution pour leur disponibilité et esprit de convivialité, d’avoir été à mon écoute et mis leur technicité et leur expérience au profit de mon travail. Je tiens à remercier tout particulièrement à Daniel TRUJILLO, Joao SACRAMENTO, Christophe MELRO, Juan Pablo VIDELA, Carlos SASTRE JURADO, Yassia GANSONRE et Sylvain GAULMIN pour m’avoir précieusement aidé lors de la réalisation des essais en laboratoire et sur le terrain. En ce qui concerne le département de recherche et développement de Sol Solution, je tiens à remercier Antoine BELIEN et Mathieu THINQUE pour leur aide et leurs conseils.
Mes remerciements vont également à tous les membres du comité de pilotage de la Fédération Nationale de Travaux Publics (FNTP) pour les échanges et les discussions fructueux que nous avons pu avoir. Je pense notamment à M. Phillipe GOTTELAND, M. Jean Paul VOLCKE, M. Serge BOREL, M. André COLSON et M. Pierre VEZOLE. Je voudrais aussi remercie particulièrement à M. Bernard HERITIER pour ces conseils et son intérêt manifesté sur mes travaux et à M. Pierre LEBOUC pour son soutiens technique et administrative pour la préparation des expériences en vrai grandeur.
Je ne saurais passer sous silence l'appui constant d’un autre doctorant qui n'a cessé de m'encourager tout au long de ce travail et avec qui j’ai partagé de très bons moments : Esteban ESCOBAR.
Je souhaite remercier mes amis de France pour leur soutien et profonde amitié tout au long de mes études à Clermont-Ferrand.
Enfin, je ne pourrai finir mes remerciements sans penser à ma famille dont leur amour, leur soutien et leur encouragement ont contribué à l’aboutissement de ce travail et d’avoir fait le déplacement pour assister à ma soutenance.
Avant-Propos
Ce travail de thèse a été réalisé dans le cadre d’une convention CIFRE (N° 2010/1602), au sein de la société Sol Solution SAS en partenariat avec la Fédération Nationale de Travaux Publics (FNTP) et l’Institut Pascal de l’Université Blaise Pascal.
Depuis le début des années 1992, la société Sol Solution conçoit, développe et commercialise des produits innovants dans le domaine de la reconnaissance géotechnique des sols. Le pénétromètre PANDA® est un pénétromètre dynamique à énergie variable permettant, d’une part, de contrôler la qualité du compactage des ouvrages en terre et d’autre part, de réaliser des essais de reconnaissance géotechnique pour l’identification de formations superficielles des sols. Plus de 20 ans de recherche ont permis de développer d'une nouvelle génération de pénétromètres dynamiques, le Panda 3®, pénétromètre dynamique équipé de différents capteurs permettant de déterminer d’une part la résistance de pointe et d’autre part des paramètres supplémentaires gouvernant le comportement mécanique du sol lors de l'enfoncement de la pointe. Par ailleurs, il existe, depuis plusieurs années, un besoin dans le contrôle de micropieux. Ce besoin a été observé par la Fédération Nationale de Travaux Publics (FNTP) qui a choisi la société Sol Solution SAS, en partenariat avec l’Université Blaise Pascal (Institut Pascal et Polytech’Clermont-Ferrand) pour réaliser une recherche concernant le contrôle des micropieux.
Le début du projet de développement d’une méthodologie de contrôle de micropieux se remonte à l’année 2008, moment auquel la Fédération Nationale de Travaux Publics (FNTP) demande à Mr. Roland Gourvès de mener une étude sur le contrôle des micropieux, en partenariat avec la plateforme technologique de Polytech’Clermont-Ferrand.
Le projet a démarré avec la réalisation d’un travail de recensement des différentes techniques de réalisation et de contrôle des micropieux en France et à l’étranger. Ce travail a été mené dans le cadre d’un projet de fin d’études (5ème année de formation d’ingénieur) réalisé par
Mr. Calvente d’une durée de 5 mois.
En décembre 2009 le projet s’est poursuivi avec un deuxième travail de recherche sur 4 mois. Ces deux travaux ont mis en évidence que l’utilisation des méthodes dynamiques peuvent permettre d’obtenir une bonne estimation de la résistance statique des micropieux. Cela a abouti ce projet de thèse.
Les recherches et expériences réalisées tout au long de ces trois années de thèse ont permis de développer une méthodologie de contrôle des micropieux innovante qui répond au cahier des charges spécifié. Ce travail a fait de plus l’objet d’un dépôt de Brevet en France sous le numéro BFF 13L0853.
Résumé
L’état de l’art réalisé dans le cadre de ce travail a permis d’identifier une grande variété de techniques de réalisation de micropieux avec des comportements effort-déformation difficiles à prédire. Quant aux méthodes de contrôle, du point de vue de l’intégrité il existe de méthodes développées pour les pieux lesquelles ne sont pas toujours applicables aux cas de micropieux ; et du point de vue du contrôle du comportement mécanique, il existe un essai assez utilisé pour le contrôle de micropieux : l’essai d’arrachement. Cet essai es facile à réaliser et à interpréter, cependant il est onéreux (long temps d’essai) et difficile à mettre en place.
Un autre type d’essai, utilisé dans le contrôle de fondations profondes, est l’essai de chargement dynamique. La recherche bibliographique a permis d’identifier les avantages et inconvénients de ce type d’essai adaptés et déjà validés dans le contrôle de pieux.
Nous avons donc proposé une nouvelle méthodologie basée sur des essais de chargement dynamique à faible contrainte nécessitant des énergies de battage beaucoup moins importantes que dans les essais de chargement dynamique classiques.
Le protocole et dispositif d’essai de la méthodologie ont été calibrés et validés à partir de simulations numériques afin notamment de justifier les choix de l’énergie d’impact, de la masse du marteau et de l’amortisseur à utiliser. Les observations numériques sont ensuite vérifiées expérimentalement sur des micropieux à échelle réelle mis en place dans un site expérimental développé dans le cadre de ce projet.
La méthodologie de contrôle en place de la résistance en service de micropieux développée, c’est une méthode originale simple à réaliser, facile à mettre en œuvre et d’interprétation immédiate. Elle a été validée aussi dans le cas de micropieux à échelle réelle en conditions maitrisées dans le site expérimental et non maitrisées dans trois chantiers réels de micropieux.
Finalement, le progrès dans les recherches, a permis le développement d’une méthodologie de contrôle de la résistance limite de micropieux. Pour cela nous proposons d’utiliser un modèle analytique de prédiction du comportement effort-déformation alimenté par les résultats de l’essai de chargement dynamique à faible déformation et d’un essai complémentaire de reconnaissance des paramètres à la rupture du sol. L´objectif de ce développement est de proposer une prédiction de la résistance limite du micropieu testé sans compromettre son intégrité. L’application de la méthodologie a montrée qu’elle donne des résultats très proches de celles observés dans les essais statiques.
Mots clés : micropieux, contrôle de fondations profondes, essai de chargement dynamique, essai
IN SITU CONTROL METHODOLOGY FOR MICROPILES BASED
ON DYNAMIC LOAD TESTING
Abstract
The review of the state-of-the-art of micropiles produced as part of this work allows to identify a wide variety of construction methodologies which have a stress-strain behavior difficult to predict. As for the testing methods, there are methods for assessing the condition of piles or shafts but they are not always applicable to the micropiles; and in terms of the control of mechanical behavior, the most used load testing micropile is the uplift static load test. The static load test is easy to perform and interpret, however the reaction system is cumbersome and slow to erect, therefore this test is time and cost consuming.
Another type of test that can be used in the control of deep foundations is the dynamic load testing. The literature review helped to identify the advantages and disadvantages of this type of test that has been adapted and validated in control of pile behavior.
The new methodology proposed in this work is based on low-strain dynamic test requiring a smaller impact energy than a high-strain dynamic test.
The testing protocol and loading device of the methodology have been calibrated and validated by numerical simulations in order to justify the choice of the impact energy, the weight of hammer and the cushion that will be used. The numerical observations are then verified by experiences in full-scale micropiles installed in an experimental site developed as part of this project.
The developed in situ control methodology of the resistance in service of micropiles is an original method, easy to carry out, simple to execute and with an immediate interpretation. This methodology has been validated on full-scale micropiles in contained conditions and also in uncontained conditions in three real projects of micropiles.
Finally, the advances in the investigations have led to develop a methodology for control the micropile’s ultimate resistance. We propose to use an analytical model for predicting the stress-strain behavior, which must be supplied with the results of the low-stress-strain dynamic micropile test and of a complementary geotechnical test in order to examine the parameter of soil failure. The goal of this development is to provide a method for predict the micropile’s ultimate resistance without compromising its integrity. The results of the application of the new method to the experimental micropiles are in close agreement with the results observed in the static load test.
Keywords: micropiles, deep foundations quality control, dynamic load test, service axial capacity,
METODOLOGIA DE CONTROL DE MICROPILOTES IN-SITU
BASADA EN ENSAYOS DE CARGA DINAMICA
Resumen
La revisión del estado del arte en relación a micropilotes, realizada en este trabajo, ha permitido identificar una gran variedad de técnicas de construcción, donde la predicción de sus comportamientos mecánicos, es una tarea difícil de realizar. Con respecto a los métodos de control, desde el punto de vista de la integridad, existen actualmente métodos no siempre aplicables a los micropilotes, y desde el punto de vista del control del comportamiento mecánico, el ensayo más utilizado es el ensayo de arrancamiento. El ensayo de arrancamiento es de fácil realización e interpretación, sin embargo es oneroso, por su larga duración y la necesidad de disponer de equipos muy pesados.
Otro tipo de ensayo, que es utilizado para el control de fundaciones profundas en general, es el ensayo de carga dinámica, cuyas ventajas y desventajas han sido identificadas en la investigación bibliográfica.
La nueva metodología propuesta, motivo de este trabajo, está basada en los ensayos de carga dinámica a baja deformación, donde se necesita una energía de impacto mucho menos importante que en el caso de los ensayos clásicos de carga dinámica.
El protocolo de la metodología y su dispositivo de ensayo han sido calibrados y validados a partir de simulaciones numéricas con el fin de, principalmente, justificar la elección de la energía de impacto, de la masa del martillo y del amortiguador a utilizar. Las observaciones numéricas han sido, luego, verificadas experimentalmente sobre micropilotes a escala real, instalados en un sitio experimental desarrollado en el marco de este proyecto.
La metodología de control in situ, de la resistencia en servicio de micropilotes, desarrollada en este trabajo, es un método original, simple de realizar, con un sistema fácil de instalar y de interpretación inmediata. Ella ha sido validada, en el caso de micropilotes a escala real en condiciones controladas en el sitio experimental, y no controladas en el caso de tres proyectos reales.
Además, el avance en las investigaciones, dio lugar al desarrollo de una metodología de control de la resistencia límite de micropilotes. Para ello proponemos utilizar un modelo analítico de predicción del comportamiento esfuerzo-deformación alimentado por resultados del ensayo de carga dinámica a baja deformación y de un ensayo complementario de reconocimiento de los parámetros de ruptura del suelo. El objetivo de este desarrollo es de proponer un método de predicción de la resistencia límite de micropilotes sin comprometer su integridad. La aplicación de la metodología ha mostrado que los resultados son muy cercanos a los observados en los ensayos de carga estática.
Palabras claves: micropilotes, control de fundaciones profundas, ensayo de carga dinámica,
Sommaire
Introduction générale ... 1
PARTIE I.
Etudes bibliographiques ... 7
INTRODUCTION ... 11
CHAPITRE I. LES MICROPIEUX ... 12
I.1. Introduction ... 12
I.2. Historique ... 12
I.3. Définition et domaine d’application ... 13
I.4. Techniques de réalisation ... 17
I.5. Classification des micropieux ... 21
I.6. Pathologies des micropieux ... 23
I.7. Bilan ... 23
CHAPITRE II. ANALYSE DU COMPORTEMENT EFFORT-DEFORMATION SOUS CHARGEMENT AXIAL ... 25
II.1. Introduction ... 25
II.2. Comportement élémentaire d’un pieu ... 25
II.3. Analyse des résultats des essais de chargement statique ... 27
II.4. Paramètres influençant le comportement des fondations profondes ... 31
II.5. Justification d’un micropieu soumis à un effort axial ... 39
II.6. Méthodes de prédiction du comportement effort-déformation ... 42
II.7. Bilan ... 51
CHAPITRE III. COMPORTEMENT D’UN PIEU SOUS UN CHOC ... 53
III.1. Introduction ... 53
III.2. Propagation unidimensionnelle d’ondes dans un milieu cylindrique élancé ... 53
III.3. Solution analytique de Paquet ... 56
III.4. Bilan ... 59
CHAPITRE IV. METHODES DE CONTROLE DES FONDATIONS PROFONDES ... 61
IV.1. Introduction ... 61
IV.2. Types de contrôle ... 62
IV.3. Essais de chargement... 68
IV.4. Contrôle de la résistance limite à partir d’essais de chargement dynamique ... 76
IV.5. Bilan ... 91
CONCLUSION ... 94
PARTIE II.
Méthodologie de contrôle en place de la résistance en service des
micropieux ... 95
INTRODUCTION ... 99
CHAPITRE I. PROPOSITION D’UNE METHODOLOGIE DE CONTROLE NON DESTRUCTIVE DE LA RESISTANCE EN SERVICE DES MICROPIEUX ... 100
I.1. Introduction ... 100
I.2. Hypothèses de base ... 100
I.3. Principe ... 102
I.4. Méthodologie ... 102
I.5. Dispositif d’essai ... 104
I.6. Bilan ... 109
II.1. Introduction ... 110
II.2. Modélisation numérique de chargement dynamique d’un micropieu ... 110
II.3. Etude paramétrique ... 117
II.4. Validation expérimentale de la méthodologie ... 131
II.5. Bilan ... 142
CHAPITRE III. VALIDATION A ECHELLE REELLE... 145
III.1. Introduction ... 145
III.2. Validation en conditions maîtrisées (site expérimental) ... 145
III.3. Validation en conditions réelles ... 148
CONCLUSION ... 152
PARTIE III.
Proposition d’une méthodologie de prédiction de la résistance
limite des micropieux ... 153
INTRODUCTION ... 155
CHAPITRE I. PROPOSITION D’UNE METHODOLOGIE DE PREDICTION DE LA RESISTANCE LIMITE DES MICROPIEUX ... 156
I.1. Introduction ... 156
I.2. Hypothèse de base ... 157
I.3. Méthodologie proposée ... 158
I.4. Application de la méthodologie ... 162
I.5. Conclusion ... 169
CHAPITRE II. PROPOSITION D’AMELIORATION DE LA METHODOLOGIE DE PREDICTION DE LA RESISTANCE LIMITE DES MICROPIEUX A PARTIR D’UN ESSAI SUR MICROPIEU « MODELE » ET D’UN MODELE NUMERIQUE DISCRET ... 171
II.1. Introduction ... 171
II.2. Micropieu « modèle » ... 171
II.3. Conclusion ... 175
CONCLUSION ... 176
Conclusion générale ... 179
Références bibliographiques ... 185
Annexes
... 197
ANNEXE A :CLASSIFICATION DES MICROPIEUX AUX ETATS-UNIS (FHWA,2005) ... 197
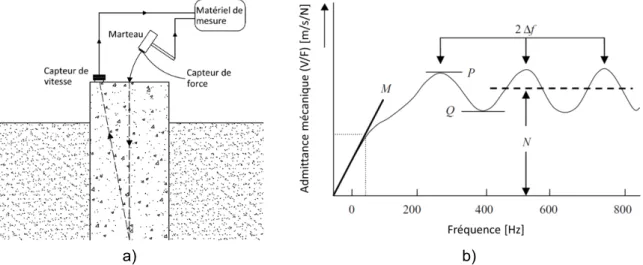
ANNEXE B :EXEMPLES DE COURBES DE MOBILITE ... 201
ANNEXE C :ESSAIS DE RECONNAISSANCE DU SOL REALISES DANS LE SITE EXPERIMENTAL ... 208
Liste des notations et abréviations
Notations
Ap : Aa : Ab : Am : At : As : A(t) : Amax : A() : B : C : D : Db : Ep : Es : Et : Ea : Eb : EM :section transversale du pieu section transversale de l’acier
section transversale du coulis ou béton section transversale du marteau section transversale de la tige surface latérale du pieu
accélération dans le domaine temporel
accélération maximale mesurée pendant l’impact accélération dans le domaine fréquentiel
diamètre de la section transversale du pieu périmètre du pieu
profondeur du pieu
longueur d’ancrage du pieu module d’élasticité du pieu module d’élasticité du sol
module d’élasticité du matériau constitutif de la tige module d’élasticité de l’acier
module d’élasticité du coulis de ciment ou béton module de Menard [m2] [m2] [m2] [m2] [m2] [m2] [m/s2] [m/s2] [m/s2] [m] [m] [m] [m] [Pa] [Pa] [Pa] [Pa] [Pa] [Pa] Fd : F(t) : Fmax : Fma : Fds : Fmt : Ft : F() : G : Ip : Js : Jc : K : Kc : Kp :
valeur de calcul à l’ELS de la charge transmise par le pieu au terrain force dans le domaine temporel
force maximale ou de pic mesurée pendant l’impact force dans le marteau
force descendante dans le pieu force montante dans le pieu force dans la tige
force dans le domaine fréquentiel module de cisaillement du sol indice de plasticité
coefficient d’amortissement de Smith
coefficient d’amortissement adimensionnel de Case coefficient de pression de terres
compressibilité du pieu
coefficient de pression de terres passive
[N] [N] [N] [N] [N] [N] [N] [N] [Pa] [s/m]
Ks : raideur statique de la tête du pieu (pente à l’origine de la courbe
charge-enfoncement) [N/m]
Kd : raideur dynamique de la tête du pieu (coefficient de réaction
proportionnel au déplacement) [N/m] Kv : L : Lm : Lt : M : M() : OCR : Pl : Q : Qte :
coefficient de réaction proportionnel à la vitesse) longueur du pieu longueur du marteau longueur de la tige masse du marteau mobilité degré de surconsolidation
pression limite d’un essai pressiométrique charge en tête du pieu
charge maximale dans l’essai de chargement statique de contrôle en traction [N/m] [m] [m] [m] [kg] [m/s] [Pa] [N] [N] Qt : Qc :
effort de traction conventionnel déduit de l'essai de traction du pieu effort critique de fluage conventionnel déterminé à l’issue de l’essai de compression
[N] [N]
Qtc : effort critique de fluage conventionnel déterminé à l’issue de l’essai
de traction [N]
Q(t) : Qmax : Qe : Qtmax :
résistance limite d’un pieu pour un temps t après sa réalisation charge maximale dans l’essai de chargement statique à la rupture charge maximale dans l’essai de chargement statique de contrôle charge maximale dans l’essai de chargement statique à la rupture en traction [N] [N] [N] [N] Rr : Rf : Rl : Rd : Rdy : Rk : Rc : Rc,cr : Rb : Rs : Rst : Rt : Rt;cr : RG : rapport de rupture
coefficient de réduction de la capacité portante réaction limite de rupture
valeur de calcul de la portance d’une fondation profonde résistance dynamique d’un pieu
valeur caractéristique de la portance du terrain sous la fondation résistance ultime en compression
résistance critique de fluage en compression résistance ultime en pointe
frottement axial ultime résistance statique d’un pieu résistance ultime en traction
résistance critique de fluage en traction
résistance limite élastique des matériaux constitutifs
[N] [N] [N] [N] [N] [N] [N] [N] [N] [N] [N] [N]
Rc;ELS : Rt;ELS : RtG : T : Tres : Tmax : Vm : V(t) : V() : Zm : Zt : Zp :
résistance en compression à l’état limite de service résistance en traction à l’état limite de service
résistance limite élastique des matériaux constitutifs en traction durée de la charge appliquée
frottement latéral résiduel frottement latéral maximal vitesse d’impact du marteau vitesse dans le domaine temporel vitesse dans le domaine fréquentiel impédance mécanique du marteau impédance mécanique de la tige impédance mécanique du pieu
[N] [N] [N] [s] [N] [N] [m/s] [m/s] [m/s] [N.m/s] [N.m/s] [N.m/s] c : cu : ct : cm : cp : cs : k : pa : q : qb : qs : qc : qd : r0 : rm : sc : st : smax : sperm : u : uc : cohésion cohésion non-drainée célérité de l’onde
vitesse de propagation des ondes dans le marteau vitesse de propagation des ondes pour les ondes P vitesse des ondes de cisaillement ou ondes S module de Janbu
pression atmosphérique
enfoncement élastique maximal (quake) résistance unitaire du sol dans la pointe frottement axial unitaire limite
résistance à la pénétration du cône CPT résistance dynamique à la pénétration rayon du pieu
distance radiale où la contrainte de cisaillement devient négligeable enfoncement en tête pour la charge Rc
enfoncement en tête du pieu
enfoncement maximal en tête du pieu enfoncement permanent en tête du pieu déplacement vertical de l’élément du pieu
déplacement vertical nécessaire pour mobiliser le frottement latéral maximal [Pa] [Pa] [m/s] [m/s] [m/s] [m/s] [m] [Pa] [m] [Pa] [Pa] [Pa] [Pa] [m] [m] [m] [m] [m] [m] [m] [m]
vm : vm0 :
vitesse mesurée dans la tête du pieu
vitesse particulaire dans l’extrémité heurtante du marteau juste après l’impact
[m/s] [m/s]
vpointe : vt0 :
vitesse calculée dans la pointe du pieu
vitesse particulaire dans l’extrémité heurtée de la tige juste après l’impact [m/s] [m/s] w : zres : déplacement radial
déplacement relatif entre le pieu et le sol pour passer du frottement maximal au résiduel
[m] [m]
zc : déplacement nécessaire pour mobiliser le frottement latéral maximal [m] : : : : : cr : s;cr : : : : :
rapport des impédances mécaniques du marteau et de la tige anglé de frottement dans l’interface
déformation axiale
angle de frottement interne du sol coefficient de sécurité partiel
coefficient partiel sur la charge de fluage de compression coefficient partiel sur la charge de fluage de traction déformation tangentielle
constant de Lame du sol coefficient de frottement coefficient de Poisson [degré] [degré] : p : m : t : s : v : n : h : : ult : :
facteur d’homogénéité verticale de la raideur du sol densité du matériau constitutif du pieu
densité du matériau constitutif du marteau densité du matériau constitutif de la tige densité du sol
contrainte verticale
contrainte normale dans la section du pieu contrainte horizontale
contrainte de cisaillement
contrainte de cisaillement ultime ou résiduelle degré de radoucissement [kg/m3] [kg/m3] [kg/m3] [kg/m3] [Pa] [Pa] [Pa] [Pa] [Pa]
Abréviations
CPT : essai de pénétration statique au cône (Cone Penetration Test) DLT : essai de chargement dynamique (Dynamic Load Test)
DPT : essai de pénétration dynamique (Dynamic Penetration Test) ELU : états limites ultimes
ELS : états limites de service IGU : injection globale unitaire IRS : injection répétitive et sélective
LSDT : essai de chargement dynamique à faible déformation (Low-Strain Dynamic Load Testing) PMT : essai pressiométrique (Pressuremeter Test)
RLT : essai de chargement rapide (Rapid Load Test) SLT : essai de chargement statique (Static Load Test)
SPT : essai de pénétration au carottier (Standard Penetration Test) STN : essai de chargement Statnamic
Introduction générale
1. Contexte et problématique
Une fondation est la partie inférieure d’une construction destinée à assurer sa stabilité. Pour aboutir à cet objectif, il faut vérifier quelle est la charge maximale que la fondation peut reprendre et si les déformations provoquées par les charges transmises par la superstructure sont admissibles. Pour cela, il est nécessaire de réaliser un dimensionnement avec des méthodes probabilistes.
La justification d’une fondation profonde est réalisée en comparant les effets des sollicitations avec la résistance que le sol est capable d’opposer. La justification est considérée comme validée lorsque la résistance dégage un niveau de sécurité acceptable vis-à-vis de la sollicitation considérée. Ceci conduit à introduire la notion fondamentale de coefficients de sécurité.
D’après l’a norme d’application nationale de l’Eurocode 7 (NF P 94-262, Juillet 2012) des essais sur les fondations profondes doivent être réalisés afin de confirmer les paramètres de dimensionnement considérés. Pour cela, la réalisation d’essais de chargement de pieux vise de façon générale à déterminer la charge admissible ainsi que les déplacements correspondants en tête, afin d’évaluer le comportement du système sol-fondation et de contrôler la compatibilité avec la superstructure de l’ouvrage. Les essais de chargement sont justifiés, principalement sur les chantiers de taille importante, parce qu’ils permettent de contrôler le coût des fondations de façon plus fiable que par l’application des méthodes théoriques, empiriques ou semi-empiriques (Bustamante, et al., 1988).
Néanmoins, malgré la fiabilité de ce type d’essai, il existe toujours des incertitudes liées à (NF P 94-262, Juillet 2012) :
la variabilité spatiale : variations des conditions du terrain entre l’essai et l’ouvrage réel ;
l’effet temporel : durée de l’essai plus courte que la durée du chargement dans la construction réelle ;
l’effet d’échelle: cas où le pieu d’essai n’a pas la même taille que le pieu réel.
L’essai le plus proche de la sollicitation réelle sur la structure est l’essai de chargement statique en compression. La vitesse d’enfoncement du pieu est très faible et l’interprétation de l’essai est facile. Par contre, le matériel d’essai n’est pas transportable manuellement et la durée de réalisation est longue. L’essai est donc cher, difficile à réaliser dans un espace réduit et ne peut pas être systématisé.
Pour réduire le coût de l’essai, il est possible d’appliquer une charge de traction. Dans l’essai d’arrachement le système de réaction est en général moins lourd et plus facile à mettre en œuvre que dans l’essai de chargement statique en compression. Cependant, il reste un essai long à réaliser.
Les deux essais présentés précédemment sont des essais de chargement avec des vitesses de chargement faibles, c’est-à-dire avec des charges pseudo-statiques. Si la vitesse de chargement est plus grande, la durée de l’essai sera plus courte. L’essai de chargement dynamique donc plus rapide et économique, est une alternative aux essais de chargement statique. Néanmoins, la multitude des phénomènes engendrés lors de l’essai le rend difficile à interpréter (viscosité du sol, flambement du pieu pendant l’impact, …). D’ailleurs, les incertitudes dans cet essai sont les mêmes que dans l’essai statique. C’est-à-dire qu’il existe toujours l’effet de la variabilité spatiale ; l’effet du temps, qui est bien sûr beaucoup plus important que dans l’essai statique ; et l’effet de taille. De plus, il faut ajouter l’incertitude dans l’interprétation des résultats.
L’utilisation des essais de chargement dynamique permet d’obtenir la résistance limite, ainsi que de vérifier l’intégrité de la fondation. Par contre, la fiabilité de l’essai est fonction de l’énergie de battage appliquée et de la précision dans la détermination du « coefficient d’amortissement visqueux », avec lequel on détermine la « résistance statique ».
En ce qui concerne les micropieux, malgré que leur utilisation se soit considérablement développée pour la reprise en sous œuvre ou pour des ouvrages neufs, ce développement ne s’est pas accompagné par la mise en place d’essais de contrôle systématiques satisfaisants. Du point de vue de l’intégrité des micropieux, des méthodes existent mais elles ne sont pas très employées. De même, en ce qui concerne le contrôle du comportement mécanique, bien que des méthodes existent, aucune de celles-ci ne sont à ce jour pas satisfaisantes du fait notamment d’une mise en œuvre trop lourde et d’un coût d’essai onéreux.
Dans le cas de micropieux, comme pour les pieux, l’essai d’arrachement est actuellement l’essai le plus utilisé en France pour contrôler les micropieux. Néanmoins, s’il est moins coûteux et plus facile à mettre en œuvre qu’un essai de chargement statique en compression, il reste un essai long à réaliser et du fait de sa mise en œuvre, il est réservé à des chantiers de taille déjà conséquente. De plus, si l’on cherche à mesurer la résistance limite ou de rupture d’un micropieu, il est nécessaire de le mobiliser suffisamment pour arriver à sa ruine ce qui exclut sa systématisation. De ce fait, on estime qu’actuellement en France, on ne contrôle qu’environ 1 micropieu sur 200 réalisés.
Dans ce contexte, l’utilisation des méthodes dynamiques pour contrôler les micropieux peut s’avérer une alternative intéressante. Mais la réalisation de cette méthodologie nécessite l’emploi d’une énergie de frappe non négligeable (masse équivalent d’environ 2% de la charge ultime) et l’obtention d’une telle énergie sur site reste encore une question délicate (notamment du fait des contraintes de chantier : accès parfois compliqué, problème d’encombrement et de sécurité,…).
Les méthodes basées sur l’utilisation d’une masse frappante en chute libre semblent les plus prometteuses mais peuvent entraîner des problèmes d’intégrité du micropieu par la création de contraintes de traction importantes au sein de l‘ouvrage. En effet les micropieux étant des fondations avec un élancement très important (rapport entre le diamètre et la longueur du micropieu), le risque d’abimer le micropieu par l’application d’une énergie de battage importante sur sa tête n’est pas négligeable (à la différence du contrôle de pieux où généralement il n’y pas de problèmes de contraintes dans les essais de chargement dynamique).
Il apparaît donc nécessaire de développer une nouvelle méthodologie de contrôle et d’estimation de la résistance statique des micropieux adaptée aux conditions de chantier. Pour ce faire, les méthodologies basée sur les essais dynamiques pour peu qu’elles soient adaptées et maîtrisées, peuvent de par leurs avantages (rapidité de mise en œuvre et de réalisation, faible coût, interprétation facile, systématisation…), permettre de répondre à cette problématique. Les contraintes de la méthodologie à développer sont :
matériel facilement transportable ;
mise en œuvre et réalisation rapide et aisée ;
interprétation simple et en temps réel ;
méthodologie économiquement réaliste.
2. Objectifs
Le contrôle d’un micropieu, peut être mené à deux niveaux du point de vue de la résistance:
contrôle en service : l’objectif est de vérifier si pour une charge déterminée il ne se produit pas un phénomène de fluage, sous charges de services ;
contrôle de la résistance limite : il sert à déterminer la charge pour laquelle les déplacements deviennent importants et ne stabilisent que pour une durée de temps importante.
L’objectif principal de la thèse est de développer une méthodologie systématique de contrôle de la résistance en service des micropieux par le biais d’un chargement dynamique en respectant les contraintes opérationnelles imposées.
Le second objectif est de développer une méthodologie permettant de prédire le comportement en grandes déformations du micropieu conditionnée aux résultats du contrôle précédent et permettant une estimation réaliste de la résistance limite du micropieu.
3. Organisation de la thèse
Le mémoire présenté ici est organisé en trois parties principales :
La première partie résume les études bibliographiques réalisées dans le cadre de ce projet
et elle est divisée en quatre chapitres. Le premier chapitre est dédié à la présentation de la technique des micropieux et à leur mode de classification en France et dans le monde. Ensuite, le second chapitre porte sur l’analyse du comportement effort-déformation sous chargement axial des fondations profondes, sur leur justification et leur adaptation au cas des micropieux et sur les méthodes de prédiction du comportement mécanique. Le troisième chapitre est dédié à l’analyse du comportement d’un élément élancé sous un choc et à la solution de l’équation d’onde. Finalement, le dernier chapitre présente les méthodes de contrôle actuelles des fondations profondes.
La deuxième partie de ce mémoire est consacrée à la présentation et au développement
d’une nouvelle méthodologie de contrôle aux ELS (Etat Limite de Service) basée sur des essais dynamiques à faible contrainte. Après une présentation de la méthodologie et du dispositif d’essai proposés, le deuxième chapitre s’attache à partir de résultats expérimentaux et de modélisation, à étudier et à justifier les choix des paramètres de l’essai (l’énergie d’impact, la masse de l’impactant, type d’amortisseur,…). Finalement, dans le troisième chapitre, les essais de validation à échelle réelle sur un site en conditions maîtrisées et sur trois chantiers en conditions réelles sont présentés. La troisième partie de ce mémoire est dévolue au développement d’une méthodologie pour
déterminer expérimentalement la résistance limite d’un micropieu. Suite à la présentation des hypothèses de base et de la démarche de la méthodologie proposée, les différentes méthodes d’obtention des paramètres d’alimentation du modèle analytique sont exposées. Finalement, la méthodologie est appliquée aux cas de micropieux de 9 m de longueur d’un site expérimental et aux micropieux de deux sites réels. Nous terminons cette partie en montrant l’intérêt lié à l’exploitation d’un nouvel essai qui permettrait d’améliorer cette prédiction.
Une conclusion générale dresse les avantages de la méthodologie proposée, récapitule les principaux apports de ce travail et propose également quelques perspectives de recherches intéressantes à développer pour poursuivre dans ce domaine.
PARTIE I – Etudes bibliographiques
Introduction ... 11
Chapitre I. Les micropieux ... 12
I.1INTRODUCTION ... 12 I.2HISTORIQUE ... 12 I.3DEFINITION ET DOMAINE D’APPLICATION ... 13 I.3.1 Définition ... 13 I.3.2 Domaines d’application ... 14
I.4TECHNIQUES DE REALISATION ... 17
I.4.1 Méthodes d’insertion dans le sol ... 18 I.4.2 Méthodes descellement ... 18 I.4.3 Armatures métalliques des micropieux ... 21
I.5CLASSIFICATION DES MICROPIEUX ... 21
I.5.1 Classification dans le monde ... 21 I.5.2 Classification selon l’Eurocode ... 22
I.6PATHOLOGIES DES MICROPIEUX ... 23 I.7BILAN ... 23
Chapitre II. Analyse du comportement effort-déformation sous chargement
axial ... 25
II.1INTRODUCTION ... 25 II.2COMPORTEMENT ELEMENTAIRE D’UN PIEU ... 25 II.3ANALYSE DES RESULTATS DES ESSAIS DE CHARGEMENT STATIQUE ... 27
II.3.1 Etudes sur modèles réduits... 27 II.3.2 Etudes expérimentales à échelle réelle ... 28
II.4PARAMETRES INFLUENÇANT LE COMPORTEMENT DES FONDATIONS PROFONDES... 31
II.4.1 Introduction ... 31 II.4.2 Mise en place d’un micropieu ... 31 II.4.3 La rigidité axiale du micropieu ... 33 II.4.4 Densité du massif ... 35 II.4.5 Vitesse de chargement ... 36 II.4.6 Type de chargement ... 37 II.4.7 Effets de vieillissement ... 37 II.4.8 Effet de pointe ... 38
II.5JUSTIFICATION D’UN MICROPIEU SOUMIS A UN EFFORT AXIAL ... 39
II.5.1 Justification selon l’Eurocode ... 39 II.5.2 Adaptations au cas des micropieux ... 41
II.6METHODES DE PREDICTION DU COMPORTEMENT EFFORT-DEFORMATION ... 42
II.6.1 Différentes méthodes existantes ... 42 II.6.2 Méthodes de transfert de charge ... 43
II.7BILAN ... 51
III.1INTRODUCTION ... 53 III.2.PROPAGATION UNIDIMENSIONNELLE D’ONDES DANS UN MILIEU CYLINDRIQUE ELANCE ... 53
III.2.1 Considérations initiales ... 53 III.2.2 L’impact du marteau ... 54 III.2.3 Théorie de propagation des ondes appliquée au battage de pieux ... 55
III.3SOLUTION ANALYTIQUE DE PAQUET ... 56 III.3.1 Hypothèses ... 57 III.3.2 Principe ... 57 III.3.3 Mesure de la raideur du fût ... 58
III.4BILAN ... 59
Chapitre IV. Méthodes de contrôle des fondations profondes ... 61
IV.1INTRODUCTION ... 61 IV.2TYPES DE CONTROLE ... 62
IV.2.1 Contrôle a priori ... 62 IV.2.2 Contrôle a posteriori ... 64
IV.3ESSAIS DE CHARGEMENT ... 68 IV.3.1 Introduction ... 68 IV.3.2 Essais de chargement statique ... 69 IV.3.3 Essais de chargement rapide ... 72 IV.3.4 Essais de chargement dynamique ... 74
IV.4CONTROLE DE LA RESISTANCE LIMITE A PARTIR D’ESSAIS DE CHARGEMENT DYNAMIQUE ... 76
IV.4.1 Méthode analytique ... 77 IV.4.2 Méthode numériques par ajustement des signaux ... 79 IV.4.3 Prédiction de la résistance limite à partir d’essais de chargement dynamique à faible
contrainte ... 83
IV.5BILAN ... 91
Introduction
Les micropieux sont des pieux forés de petit diamètre (inférieur à 300 mm) pour lesquels le frottement latéral, en général élevé, est privilégié par rapport à la résistance de pointe. L’utilisation des micropieux a fortement augmenté depuis leur création dans les années 1950. En raison de sa facilité d’installation dans les sites d’accès difficile, cette technique de fondation profonde a été adoptée pour des applications diverses, principalement, dans les domaines de la reprise en sous-œuvre, pour le renforcement des sols (la stabilité des pentes et les excavations) et comme éléments de fondation de nouveaux ouvrages.
Le comportement d’un micropieu est fortement influencé par plusieurs facteurs, et en particulier, la technique de réalisation du forage, la méthode de scellement et le type du terrain. Vue la vaste panoplie des technologies disponibles pour réaliser des micropieux, les méthodes de calcul généralement utilisées ne sont pas toujours en accord avec toutes ces techniques. Cela met en évidence la nécessité d’un contrôle in situ du comportement des micropieux pour vérifier les hypothèses de calcul.
Cette partie est consacrée à la présentation de la technologie des micropieux, à l’étude des principales caractéristiques de leur comportement sous chargement axial, aux méthodes de justifications des fondations profondes et de leur adaptation aux cas des micropieux. On présente ensuite, l’étude du comportement d’un élément élancé sous un choc et la résolution de l’équation différentielle de l’onde. Finalement, le dernier chapitre aborde les techniques actuelles de contrôle de l’intégrité et du comportement mécanique développées pour les fondations profondes.
L’étude bibliographique s’est principalement appuyée sur les recherchés réalisées dans le cadre du projet national FOREVER (2004) et sur les études réalisées par l’organisme FHWA (1997) aux Etats-Unis.
Chapitre I. Les micropieux
I.1. Introduction
Bien que les micropieux soient utilisés depuis plus de 60 ans, l’étude de leur comportement est récente. En France l’étude de cette technique a démarré en 1993 au moment où le Gouvernement français fonde le projet national FOREVER (Fondations REnforcées VERticalement) (FOREVER, 2004) en collaboration avec l’Université Polytechnique de New York et la FHWA (Federal Highway Administration). Ces recherches menées sur la base d’essais sur modèle réduits en centrifugeuse, en chambres d’étalonnage et sur table vibrante, d’analyses et essais de chantier et d’examen du comportement des micropieux dans un site expérimental en vraie grandeur ont donné un élan à la maîtrise de cette technique à l’échelle internationale et ont mis en œuvre d’importants moyens expérimentaux et de modélisation (Alsaleh, 2007; Schlosser, et al., 2013).
Ce chapitre est dédié à la présentation de la technique des micropieux. Après un bref historique sur le développement de cette technique et son expansion en Europe et dans le monde, nous présentons la définition actuelle des micropieux, les techniques de réalisation, leurs classifications reconnues en France, en Europe, et aux Etats Unis et les diverses applications de cette technique en France et à l’étranger.
I.2. Historique
On peut se reporter à l’année 1788 comme la première référence à une technique de fondation semblable à la technique des micropieux actuelle. Perronet (1788) utilise des « pilotis » pour porter un ouvrage de maçonnerie que l’on veut fonder sous les basse eaux, comme les ponts, les murs de quai, les écluses, et autres ouvrages de cette espèce. Plus tard, Gauthey (1813), dans son traité sur la construction des ponts, parle aussi des « pilotis » comme des éléments de fondation battus normalement réalisés en chêne avec des diamètres moyens de 250 à 350 mm et 6 à 8 m de longueurs.
La technique des micropieux modernes a été créée en 1952 par l'entreprise Fondedile, de Naples, sous la direction technique de l’ingénieur Fernando Lizzi (1982a). Ces premiers pieux de petits diamètres (100 mm) étaient forés et scellés au terrain par un mortier. Ils ont été initialement utilisés en Italie pour les travaux de reprise en sous-œuvre de bâtiments anciens et d’ouvrages endommagés par la deuxième guerre mondiale (Estephan, 2003).
Figure I.1. L’ingénieur Fernando Lizzi (1914-2003) et un exemple d’application du « pali radice » (Tour Al-Hadba en Irak) (Lizzi, 1982b)
L'entreprise Fondedile introduit la technique du pieu racine en Grande Bretagne en 1962 pour la restauration des bâtiments anciens. Les « pieux racines » étaient des pieux de 100 mm de
essentiellement par frottement axial et assurent une bonne adhérence entre la structure et le sol. La stabilité fournie par ce système de fondation est comparable à celle assurée par les racines des arbres. D’où l’appellation de pieu racine. En 1965, des micropieux similaires aux « pieux racines » sont utilisés en Allemagne pour la réalisation des ouvrages souterrains en milieu urbain. Les pieux racines sont également utilisés lors de l'exécution des travaux du métro de Milan en Italie (Estephan, 2003).
Dans l’année 1973, l’entreprise Fondedile introduit le pieu racine en Amérique du Nord pour différents travaux de reprise en sous-œuvre dans les villes de Boston et New York. Vers le milieu des années 80, il y a eu une expansion de l’application de cette technique aux Etats-Unis, principalement comme éléments de support et aussi pour le renforcement des sols. Dans la plupart de cas, les applications étaient directement reliées aux projets routiers, cela a poussé à l’organisme FHWA à réaliser une étude sur l’état de l’art de cette technique, le document sorti de ce projet dans l’année 1997 s’appelle « Drilled and Grouted Micropiles – State of the Practice Review » (FHWA, 1997).
En l'espace d'un demi-siècle, la technique des micropieux s’est développée à travers le monde sous de multiples appellations : pali radice ou micropali (en italien et baptisé par Lizzi), pieux racines, pieux aiguilles, minipieux ou micropieux (en français), minipiles, micropiles, pin piles,
root piles ou needle piles (en anglais), mikropfahl, verpresspfahle ou wurzelpfahle (en allemand), estaca raiz (en portugais) ou micropilotes (en espagnol).
D’un point de vue pratique, les micropieux sont très utilisés pour les travaux de reprise en sous-œuvre grâce à la légèreté et au faible encombrement des matériels permettant leur mise en œuvre. En outre, leur mise en place n'entraîne que de faibles perturbations de l'équilibre de la structure, du sol et de l'environnement.
Le développement de ce système de fondation profonde découle ainsi de la diversité de ses applications et de ses multiples avantages. En effet, à la fin des années 50, la pratique des micropieux s'étend à la stabilisation des pentes, aux renforcements des sols et à la protection des ouvrages souterrains (Estephan, 2003).
Une étude statistique réalisée par Van Impe (2004) montre qu'en 2004 l'utilisation des micropieux (ayant un diamètre inférieur à 150 mm) constituait 5% du marché français (figure I.2), 7% du marché européen et 6% du marché international des pieux.
Figure I.2. Type des pieux utilisés dans la pratique française (d’après (Van Impe, 2004)).
I.3. Définition et domaine d’application
I.3.1. Définition
Fernando Lizzi (1982a) a défini le pieu racine comme un pieu foré ayant un diamètre de 100 mm et rempli de mortier de ciment. Ces pieux de petit diamètre fournissent une portance, essentiellement par frottement. Néanmoins, la définition actuelle des micropieux varie selon les pays.
En France, on définit les micropieux comme étant des pieux ayant un diamètre inférieur à 250 mm (CCTG, 1993). En Belgique, la marge du diamètre des micropieux est plus étroite : un micropieu a un diamètre inférieur à 150 mm (Van Impe, 1997). En Allemagne, où est née la première norme sur ce type de fondation (Herbst, 2000), l'appellation « micropieu » est adoptée pour les pieux dont le diamètre est compris entre100 et 300 mm (DIN, 1983). En Italie, les diamètres des micropieux varient de 90 à 300 mm (Fiorotto, 2000). Enfin, aux Etats‐Unis, les diamètres conventionnels sont inférieurs à 300 mm (FHWA, 2005).
Par ailleurs, l’Eurocode 7 définit aujourd’hui les micropieux comme des pieux de diamètre maximum 300 mm (NF P 94-262). La norme européenne NF EN 14199 (2005) établit les principes généraux pour l'exécution des micropieux et elle s'applique aux pieux forés dont le diamètre du fût est inférieur à 300 mm et aux pieux foncés dont le diamètre du fût ou la dimension maximale de la section transversale du fût est inférieure à 150 mm.
I.3.2. Domaines d’application
On peut classer leurs applications dans deux grandes catégories :
comme éléments de fondations,
comme renforcement de sol.
Le grand intérêt des micropieux réside dans la facilité d’installation, en particulier dans les sites d’accès difficile. Par ailleurs, dans la plupart des cas où on a eu recours aux micropieux comme solution à la place des pieux traditionnels, c’est pour l’une des raisons évoquées ci-après (Alsaleh, 2007) :
accès difficile au site avec moins de 3,5 m d’hauteur ;
restriction dues aux vibrations induites par la réalisation de grands pieux, en raison de la sensibilité de l’ouvrage lui-même ou de son voisinage ;
restrictions dues aux bruits ;
restriction de l’élargissement de la fondation existante ;
exigence de maintenir le trafic sur une autoroute lors de remplacement ou de renforcement d’un pont ;
besoin d’une grande capacité portante en compression ainsi qu’en traction ;
rigidité importante du sol écarte l’utilisation de gros pieux ;
complexité géologique du site qui présente une variation importante de la rigidité ; et
ouvrages en zone sismique qui nécessitent une fondation relativement flexible avec une grande capacité portante.
L’utilisation des micropieux comme éléments de fondations peut se faire :
en reprise en sous-œuvre, dans ce cas les tassements différentiels subits par un
ouvrage exigent le recours aux micropieux comme solution pour la reprise partielle ou totale de la charge de la structure comme par exemple pour l’hôtel « Mandalay Bay
Resort Hotel » de 43 étages à Las Vegas (figure I.3.a) où ont été réalisés 536
micropieux entre les pieux de fondation existants. La résistance en service de chaque micropieu est d’environ 220 kN avec un diamètre de 178 mm et une longueur de 60 m (Pearlman, 2001).
en fondations neuves de bâtiments et d’ouvrages d’art, il existe des cas où l’accès
difficile au site ou la complexité du système de fondation suggèrent l’utilisation des micropieux comme par exemple dans le cas de la construction d’un hôtel de 6 étages dans le centre historique de Barcelone (figure I.3.b) exigeant la mise en place d’un système de fondation complexe à travers des ouvrages souterrains existants. Pour ce faire, des micropieux de 100 mm de diamètre et 28 m de longueur (13 m de fiche et
15 m de longueur libre) ont été construits pour reprendre, chacun, une charge ponctuelle de 500 kN (Alonso & Casanova, 1991).
(a) (b)
Figure I.3. a) Renforcement par micropieux de l’hôtel « Mandalay Bay Resort Hotel » (Pearlman, 2001) et b) schéma d’une section du projet de construction d’un immeuble sur ouvrages existants
(d’après Alonso etCasanova (1991))
en fondations neuves de bâtiments et d’ouvrages d’art, les micropieux sont
également utilisés comme solution pour les fondations d’éoliennes lacustres ou de pylônes électriques (figure I.4). (Chih-Hung Chen & Slisbury, 2012).
(a) (b) (c)
Figure I.4. a) Pylône électrique dans le parc national Angeles aux Etats-Unis, b) fondation finie sur un pied du pylône et c) groupe des micropieux (Chih-Hung Chen & Slisbury, 2012)
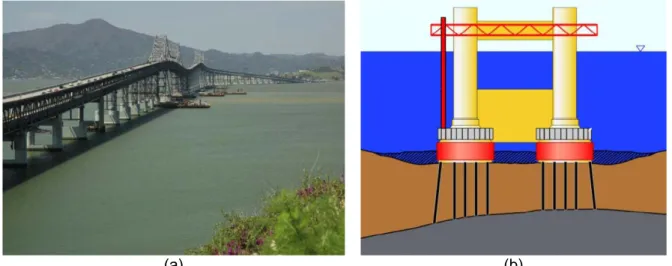
pour des ouvrages en zone sismique, cette application est très répandue dans la
réparation ou le renforcement de ponts en zone sismique. A titre de l’exemple, la figure I.5 présente le cas du renforcement du pont de San Rafael, à Richmond, aux Etats-Unis, où des micropieux de 4 m à 17 m de longueur et 220 mm de diamètre ont été construits afin de supporter des charges comprises entre 200 et 300 kN (Gibler, et al., 2005).
(a) (b)
Figure I.5. a) Pont de Richmond San Rafael à USA et b) schéma d’installation des micropieux (Gibler, et al., 2005)
L’utilisation des micropieux comme éléments de renforcement de sol a pour intérêt d’être une technique assez polyvalente dont les avantages par rapport à d’autres techniques de renforcement sont présentés dans le tableau I.1.
Tableau I.1. Efforts majeurs dans les inclusions des systèmes de renforcements de sols
(Schlosser & Unterreiner, 1994)
Techniques de renforcement Traction Compression Flexion Cisaillement
Armatures ou bandes en remblai ***
Nappes en remblai ***
Clouage en soutènement ** * *
Clouage de pente instable * *** ***
Micropieux en groupes ou réseaux ** ** * *
Renforcements tridimensionnels en
remblai ***
* faible ** important *** prépondérant
Selon Van Impe (1997), le renforcement des sols par micropieux représente 9% du marché international du renforcement des sols. On y distingue particulièrement la stabilité des pentes, ou des talus, et la protection des ouvrages souterrains lors des excavations. La figure I.6 montre un exemple de stabilisation de pentes à l’aide de micropieux.
I.4. Techniques de réalisation
Un micropieu est généralement constitué d’une armature enrobée dans une coulis et surmontée en tête par une platine assurant la liaison entre le micropieu et la structure (figure I.7) La réalisation d’un micropieu est un processus qui normalement consiste en : forage, mise en place de l’armature et injection du coulis.
Figure I.7. Schéma d’un micropieu type
Actuellement différentes techniques de réalisation de micropieux sont utilisées en France et dans le monde. Selon les méthodes d’insertion dans le sol et les matériaux utilisés en passant par les méthodes de scellement, il existe un grand nombre de technologies disponibles pour réaliser des micropieux. Les performances et le comportement de ces micropieux dépend en grande partie de la technique utilisée. C’est pour cette raison que différents organismes ont essayé de les regrouper et de donner une classification des micropieux en fonction des techniques utilisées pour leur mise en œuvre.
La norme européenne NF EN 14199 (2005) établit les principes généraux pour l'exécution des micropieux. En dehors de considérations d'ordre pratique, il n'y a pas de limitation concernant les élargissements du fût ou de la base, la longueur, l'inclinaison ou l'élancement des micropieux. Les types des micropieux les plus utilisés en France sont des micropieux forés (figure I.7), cependant il existe des autres techniques comme les micropieux battus ou vissés. Les micropieux battus sont très utilisés dans les pays d’Europe du Nord (Hartikainen, 2000). Le principe des micropieux vissés repose sur l’utilisation d’un tube en acier à un ou plusieurs filets (lames circulaires de formes hélicoïdales) qui est vissé dans le sol à l'aide d'un équipement spécialisé.
La synthèse présentée ci-après s’appuie sur les travaux effectués dans le cadre du projet national FOREVER (2004) et le manuel de référence de l’organisme FHWA (2005).
I.4.1. Méthodes d’insertion dans le sol
Il existe une vaste gamme de méthodes d’insertion dans le sol qui vont de la réalisation d’un forage préalable avec enlèvement de matière, forage sans enlèvement de matière et forage utilisant l’armature comme train de tiges (battu ou foré) (FOREVER, 2004).
La technique de forage utilisée pour réaliser un micropieu conditionne l’état du sol pour un certain temps et sur une certaine distance. La méthode de forage choisie doit ainsi éviter de causer un niveau inadmissible de perturbation du sol au voisinage du micropieu.
Dans la pratique, l’appareil de forage le plus utilisé est la foreuse hydraulique (électrique ou diesel), qui est généralement montée sur des chenilles pour permettre un accès dans des terrains difficiles ou très pentus (FHWA, 2005). Elles ont normalement un mécanisme articulé qui permet de s’adapter aux conditions particulaires, telle que la réalisation d’un micropieu proche d’un mur (figure I.8).
En ce qui concerne l’outil de coupe, celui-ci sert à détruire le sol à la base du forage en cours de réalisation. Il doit être choisi pour causer une perturbation minimale au sol et aux structures voisines. L’outil employé doit être efficient (notamment vis-à-vis de la pénétration), et économique.
Figure I.8. Exemples de foreuses utilisées.
Pour enlever le sol détruit du fond du trou pendant la réalisation du forage, on injecte de l’eau ou de l’air sous pression. Par ailleurs, l’utilisation de la boue de bentonite pour stabiliser et nettoyer le forage altère le frottement dans l’interface coulis-sol en créant un film d’argile dans l’interface (FHWA, 2005).
I.4.2. Méthodes de scellement
Le matériau de scellement doit servir à de multiples objectifs :
transférer les charges imposées entre le renforcement et le sol environnant ;
protéger le renforcement métallique de la corrosion ;
étendre la section utile du micropieu au-delà des limites du forage par infiltration, densification et/ou fissuration.
L’injection de coulis ou de mortier sous pression plus ou moins élevée vise à améliorer voire augmenter le frottement entre le micropieu et le sol dans l’interface, augmentant ainsi la capacité portante du micropieu. La pression d’injection cause souvent un recompactage du sol au voisinage du forage et agrandit le diamètre effectif du micropieu (FHWA, 2005).
(a) Matériaux de scellement
Le matériau le plus utilisé pour le scellement des micropieux est le coulis de ciment. La composition de base du coulis est un mélange de ciment (C) et d’eau (E), réalisé le plus souvent à l’aide d’un turbo-malaxeur, ce qui permet d’assurer une défloculation efficace des grains de ciment. On y ajoute parfois un adjuvant superplastifiant. Le ciment doit être compatible avec les conditions d’agressivité du sol et des eaux souterraines. De même, le coulis de ciment doit être conçu pour fournir une grande résistance à la compression, mais il doit aussi être injectable. Dans la pratique, il faut faire varier le dosage du ciment afin d’obtenir les caractéristiques souhaitées. Normalement, le dosage (rapport C/E) varie entre 2 et 2,5 (E/C : 0,4-0,5) (FHWA, 2005). La figure I.9 montre l’influence du rapport E/C sur la résistance en compression du coulis durci.
Figure I.9. Effet du rapport E/C (Eau/Ciment) sur la résistance à la compression du coulis de ciment (Littlejohn & Bruce, 1977)
Par ailleurs, quelques études ont montré qu’il est possible également d’utiliser d’autres types de matériaux pour le scellement des fondations, tel que la résine expansive de polyuréthane (Valentino & Stevanoni, 2010; Valentino, et al., 2013).
(b) Scellement « gravitaire »
L’expression « scellement gravitaire » désigne en fait plusieurs méthodes. Celles-ci ont en commun le fait que le coulis, après mise en œuvre et avant prise du ciment, présente une surface libre. En revanche, les performances disponibles en matière de frottement latéral, pour un contexte géotechnique donné, ne sont pas les mêmes avec toutes ces méthodes.
Le dosage en ciment du coulis de scellement (rapport C/E) est voisin de 2; l’utilisation d’un turbo-malaxeur ou d’un superplastifiant permet de le porter à 2,5 ou plus.
Remplissage depuis l’orifice du forage
Le forage, tubé ou non, est rempli de coulis déversé depuis la tête :
dans le cas d’un forage nu, l’armature est insérée après remplissage; l’essorage et la décantation conduisent à un abaissement ultérieur de l’arase du coulis et un complément est déversé un peu plus tard ;
dans le cas d’un forage tubé, on déverse le coulis avant de remonter le tube; l’armature est insérée après déversement du coulis, soit avant, soit après l’extraction du tube (la deuxième option risque fort de conduire à des pollutions du coulis par des matériaux détachés des parois du forage); un complément de coulis est à déverser avant la fin de l’extraction du tube (qui s’accompagne d’un abaissement de l’arase du coulis); un autre complément compensera un peu plus tard les effets de l’essorage et de la décantation.
Remplissage par un tube atteignant le fond du forage
Dans cette méthode, le tube d’injection, par lequel transite le coulis pour atteindre la base du forage, peut être constitué par l’armature elle-même ou être un tube indépendant, abandonné ou récupéré (cf. figure I.13). Une fois réalisée la première phase d’injection, il est nécessaire de réaliser une compensation d’essorage. Cela, peut être réalisé par décantation par déversement en tête ou en faisant une deuxième phase d’injection. La deuxième manière de procéder est recommandée, car l’état de contraintes dans le coulis est très supérieur à un état hydrostatique or cet état conditionne directement la résistance au cisaillement de l’interface sol/micropieu (FOREVER, 2004).
(c) Injection globale unitaire (IGU)
Dans cette méthode, le coulis de remplissage du forage, appelé « coulis de gaine » est mis en place selon une méthode gravitaire. Le micropieu est équipé d’un tube à manchettes (ou autres clapets) comportant un petit nombre de manchettes (généralement 3 ou 4) noyé dans le coulis de gaine. Après prise du coulis de gaine, mais sans attendre qu’il ait acquis une grande résistance en traction, on injecte un coulis complémentaire en tête du tube à manchettes; la pression d’injection fait « claquer » le coulis de gaine durci et le coulis d’injection pénètre « en force » dans le sol.
(d) Injection répétitive et sélective (IRS)
Cette méthode s’inspire directement des technologies d’injection des sols meubles. Le micropieu est équipé d’un tube à manchettes comprenant un bon nombre de manchettes et scellé dans le coulis de gaine. Un obturateur double permet de sélectionner une manchette pour procéder à l’injection à un niveau choisi. Après prise du coulis de gaine, du coulis est injecté sous forte pression par cette manchette : le coulis de gaine est alors « claqué », puis le coulis complémentaire pénètre dans le sol. Après avoir « traité » une manchette, on passe à une autre. En principe, on peut réutiliser à volonté les manchettes pour procéder à plusieurs injections successives. L’IRS conduit à l’obtention d’un frottement latéral généralement élevé par rapport aux caractéristiques mécaniques des sols d’ancrage.
Le rapport C/E des coulis d’injection employés dans les procédés d’injection globale unitaire (IGU) et d’injection répétitive et sélective (IRS) est généralement voisin de 2.
(e) Injection répétitive simultanée
Le principe de ce type d’injection consiste à équiper le micropieu d’un tube de petit diamètre (centimétrique), muni de manchettes, et se retournant à la base du micropieu de telle sorte que les deux extrémités sortent du forage. Après durcissement du coulis de gaine, mis en place à l’aide d’un autre tube débouchant à la base, on injecte du coulis par le tube en boucle jusqu’à constater la purge de l’air contenu dans le tube, puis on obture l’extrémité de sortie de l’air et puis on injecte le coulis par les manchettes. Pour que la plupart des manchettes soient le siège d’un passage du coulis, il faut que la réinjection ait lieu assez tôt afin que la résistance en traction du coulis de gaine soit sensiblement inférieure à la plus petite valeur de la pression limite pressiométrique des sols de la zone de scellement.