Développement d'outils de conception de Machines polyphasées à aimants utilisant l'Approche multimachine.
233
0
0
Texte intégral
Figure

+7


Outline
Hypoth` eses
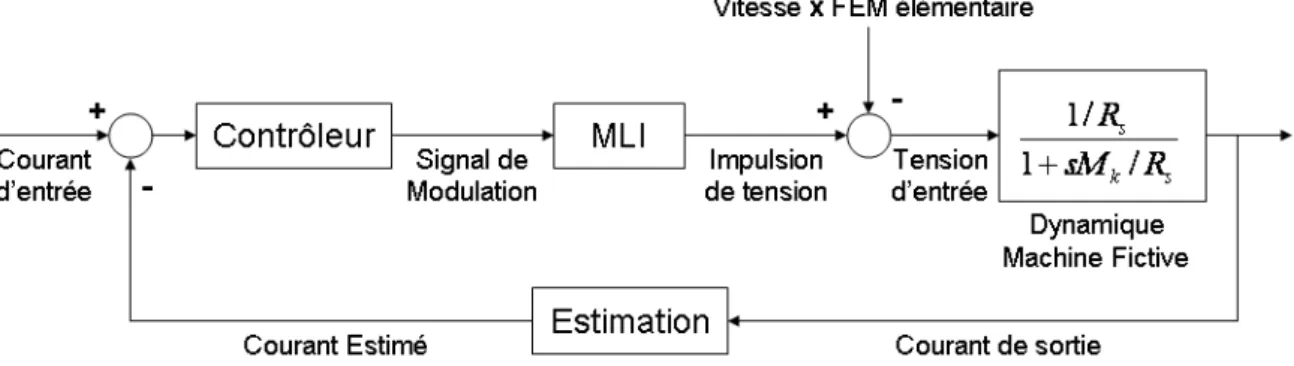
Commande multimachine de la machine polyphas´ ee aliment´ ee par on-
Crit` eres sur les constantes de temps de machines fictives
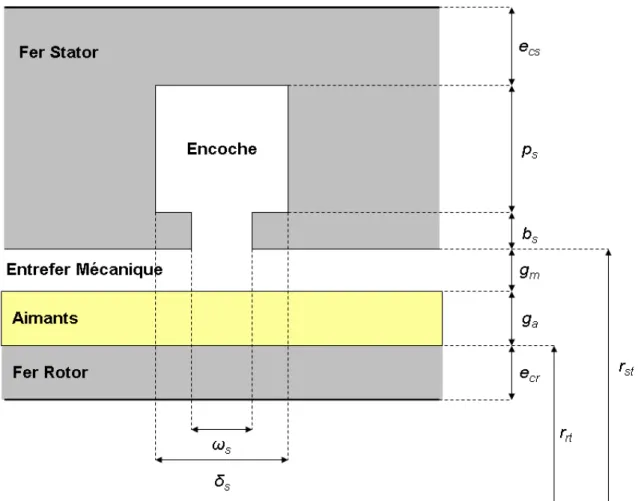
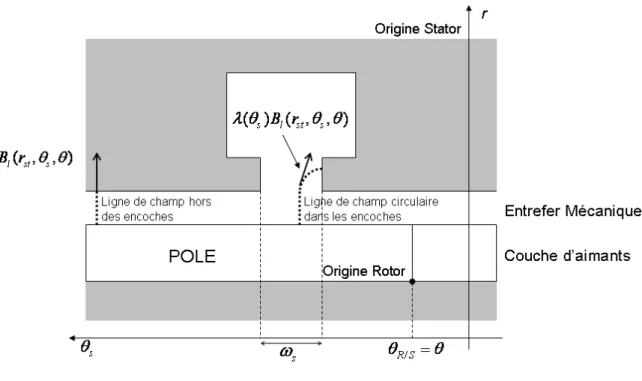
Calcul analytique du champ pour une machine sans encoche ` a pˆ oles lisses
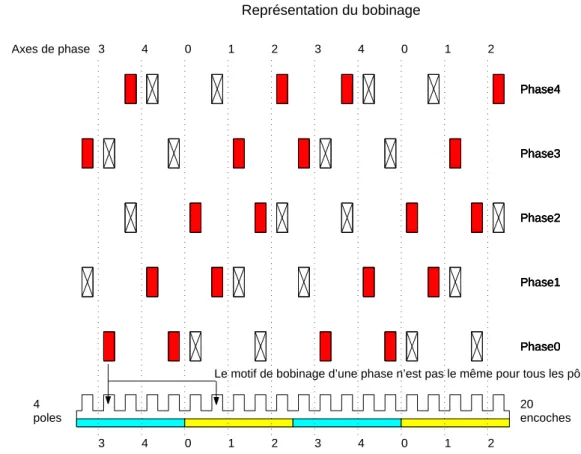
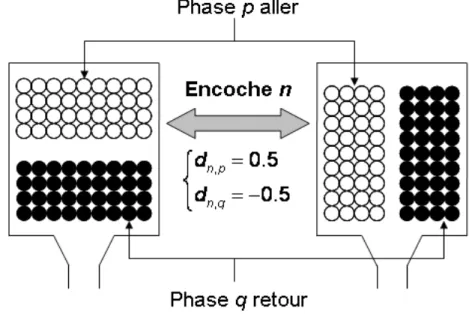
Fonctions de bobinage de phase
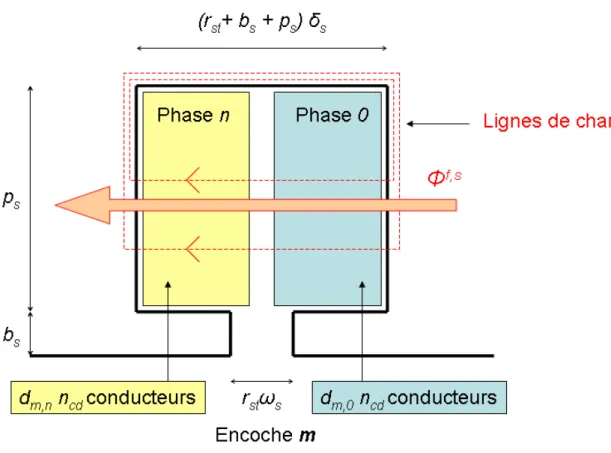
Inductance d’entrefer en fonction de la densit´ e de conducteurs
Lecture des composantes vectorielles comme ´ el´ ements de suites
Familles ´ etendues d’harmoniques de machines fictives
R´ eflexions sur la notion d’aimants fictifs
Caract´ erisation des performances des bobinages diam´ etrau
Documents relatifs