JOCELYN PARENT
Système d'imagerie à grandissement variable localement
par contrôle actif de la distorsion
Thèse présentée
à la Faculté des études supérieures et postdoctorales de l'Université Laval dans le cadre du programme de doctorat en physique
pour l'obtention du grade de Philosophiae Doctor (PhD)
Faculté des sciences et de génie UNIVERSITÉ LAVAL
QUÉBEC
2012
Cette thèse présente un nouveau type de système optique, un imageur à grandissement lo-calisé. L'idée derrière ce dernier est de modifier en temps réel la distorsion à l'aide d'un com-posant optique actif qui est positionné loin des pupilles pour permettre de modifier chaque champ local de façon individuelle. Avec la bonne déformation de la surface active, on peut alors créer des zones de l'image avec un grandissement augmenté. De plus, si l'on désire conserver le champ de vue total constant, il est possible d'y parvenir en combinant ces zones d'intérêt à des zones de redressement où le grandissement est diminué.
Pour bien comprendre comment se comportent ces systèmes avec beaucoup de distorsion, une analyse des erreurs de surface est d'abord présentée. On y conclut que ces lentilles ont des particularités qui compliquent leur conception et leur tolérancement. On obtient lors de cette analyse une équation reliant le déplacement dans le plan image en fonction des défauts de fabrication sur la surface frontale. De cette équation, on comprend qu'un des paramètres importants lors du tolérancement de ces systèmes est la longueur focale locale, définie comme étant la dérivée de la position dans le plan image par rapport à l'angle du champ de vue. Cela permet de conclure que dans la conception de ce type de lentilles, des tolérances plus serrées doivent être choisies dans certaines parties de la surface, contrairement à un critère de qualité unique partout sur la surface comme la norme actuelle le propose.
Ensuite, à partir de ces résultats du déplacement dans le plan image par rapport à une er-reur donnée, un concept d'imageur à grandissement localisé est développé. Tout d'abord, les équations de base pour ce type d'imageur sont obtenues. On peut y conclure qu'en première approximation, c'est le produit de la courbure z" sur la surface déformable par la distance L0 entre la surface et la pupille d'entrée du reste de l'imageur qui détermine le rapport de
grandissement local que l'on peut obtenir. De ces équations, on définit également des limites fondamentales sur l'amplitude que le composant déformable doit produire et sur le / / # qui conserve la qualité d'image à un niveau acceptable. À partir de ces résultats, des simulations à l'aide du logiciel ZEMAX sont effectuées, confirmant ainsi les paramètres obtenus mathé-matiquement. Ces simulations conduisent finalement à un prototype expérimental utilisant un miroir déformable ferrofluidique comme surface active. Avec une distance focale originale de
Ill
f0 = 12.5 mm et une distance L0 = 220 mm, des résultats expérimentaux avec un système
pouvant produire des rapports de grandissement supérieurs à 3 dans une zone d'intérêt sont présentés et analysés.
Bref, s'il est possible de vaincre les limites fondamentales, cet imageur à grandissement localisé a le potentiel de révolutionner certains domaines d'imagerie grâce à ses capacités originales en conception optique.
This thesis presents a novel type of optical system, a locally magnifying imager. The idea behind it is to modify in real-time the distortion by using an active component placed far from pupils, allowing to modify each field individually. With the correct shape on the active surface, it is thus possible to create zones of increased magnification. Also, if the total field of view has to remain constant, it is possible to do so by combining theses zone of interest to zones of settling back where the magnification is decreased.
To fully understand how systems with controlled distortion work, an analysis of surface errors is presented. The conclusion is that in these systems, some particularities complicate their design and tolerancing. From this analysis, an equation relating the displacement in the image plane to the front surface error shape is obtained. From this equation, it is apparent that an important parameter during the tolerancing of systems with distortion is the local focal length, defined as the derivative of the position in the image plane by the field of view angle. This allows concluding that during design of such systems, tighter tolerances have to be defined in certain parts of the surface, contrary to a uniform criterion as it is the case with the actual norm.
After, from theses results of image plane displacement from a given error, the concept of the locally magnifying imager is developed. First, the basic equations for this type of imager are obtained. It was concluded that, in first approximation, it is the product of the curvature z" on the déformable surface by the distance L0 between the active surface and
the entrance pupil of the remaining imager that determines the local ratio of magnification possible to acheive. From these equations, it is also possible to define fundamental limits on the amplitude required by the déformable component and on the / / # to keep image quality at an acceptable level. From these results, ZEMAX simulations are done, confirming the ma-thematically obtained parameters. The simulations finally lead to an experimental prototype using a ferrofluidic déformable mirror as the active surface. With an original focal length of f0 = 12.5 mm and a distance L0 = 220 mm, experimental results with a system that can
In short, if the fundamental limits are countered, this locally magnifying imager has the potential of changing some imaging domains thank to their novel capabilities in optical de-sign.
Un projet de doctorat d'une telle envergure n'aurait pas été possible sans le soutien de plusieurs personnes de mon entourage et je profite de ce moment au début de cette thèse pour les remercier.
Tout d'abord, mes remerciements s'adressent à mon directeur de recherche Simon Thi-bault. Grâce à tes précieux conseils et ton suivi assidu de l'avancement et de la direction de mon doctorat, j'ai pu réaliser ce projet à une vitesse au-delà de mes attentes en prévoyant et contournant les obstacles.
Je veux également adresser toute ma reconnaissance à l'équipe du LRIO. Plus précisé-ment, merci aux professionnels Pierre Désaulniers et Denis Brousseau pour votre support, au post-doctorant Hu Zhang ainsi qu'au technicien Hugues Auger. Bien sûr, le soutien des autres étudiants, actuels et antérieurs, a été essentiel, tant sur le point académique qu'humain. À Martin Larivière-Bastien, Anne-Sophie Poulin-Girard, Hugo Lemieux, Daniel Bouffard Lan-dry, Sébastien Bouchard, Jonathan Laberge, Julie Mandar, Aymen Arfaoui, Dany Labrecque et Marie-Pier Côté, l'aide que vous m'avez apportée tout au long de ce projet a été essen-tielle pour que je puisse le mener à terme. Merci à toute l'équipe pour l'agréable ambiance de travail au cours de ces années.
Je désire mentionner le soutien apporté par le département de physique de l'université Laval et le centre d'optique, photonique et laser. Plus spécifiquement, je remercie Diane Dé-ziel, sans qui la qualité de l'anglais de mes articles n'aurait pas été aussi bonne. Je ne veux pas oublier les autres professeurs en plus de mon directeur qui ont accepté d'évaluer une ou plusieurs des multiples étapes du programme de doctorat en physique, soit Tigran Galstian, Patrick Hébert, Ermanno Borra, Denis Laurendeau et Pierre Chavel. Aussi, je dois souligner la coopération des partenaires de la chaire de recherche industrielle du CRSNG en concep-tion optique, plus particulièrement ImmerVision pour l'accès à la prescripconcep-tion optique de la lentille Panomorphe. Enfin, un remerciement à l'équipe du professeur Borra pour m'avoir permis l'utilisation du miroir déformable ferrofluidique lors de la section expérimentale.
Vil
Plus près de moi, j'exprime toute ma gratitude à Céline Juneau, Gilles Parent et Guillaume Parent pour leur support, non seulement durant les trois dernières années, mais depuis mainte-nant 27 ans. Sans vous, je n'y serais pas arrivé. Merci également à tous ceux qui sont proches de moi, plus spécifiquement à Evelyne Brown-Dussault pour le support moral, et à tous ceux qui m'ont côtoyé lors de ces années à l'université Laval.
Finalement, je remercie le CRSNG ainsi que le FQRNT pour le financement offert lors de ces trois années de doctorat, sans quoi ce projet aurait été difficilement réalisable.
Table des matières
Résumé ii Abstract iv Remerciements vi Table des matières i \
Liste des tableaux \ii Table des figures \ i i i
Liste des variables et abréviations x vi ii
1 Introduction 1 2 Concepts de base en conception optique 7
2.1 Introduction 7 2.2 Conception optique 8
2.2.1 Champ de vue et grandissement 8 2.2.2 Diaphragme d'ouverture, pupilles, empreinte de faisceau, ouverture
et rayon-chef 10 2.2.3 Logiciels de conception optique 15
2.3 Aberrations optiques 16 2.3.1 Distorsion 16 2.3.2 Défocalisation 22 2.3.3 Diffraction 22 2.4 Tolérancement des erreurs de surface 24
2.4.1 Trois régimes d'erreurs de surface 24
2.4.2 Normes actuelles 27
2.5 Conclusion 28 3 Systèmes optiques actuels et composants optiques actifs 29
3.2.3 Systèmes à distorsion contrôlée 34 3.2.4 Imagerie à super-résolution 36 3.2.5 Grandissement localisé par le détecteur 37
3.3 Composants optiques actifs 39 3.3.1 Miroirs déformables continus 39
3.3.2 Miroirs déformables segmentés 40 3.3.3 Modulateurs spatiaux de lumière à base de cristaux liquides 41
3.3.4 Autres composants actifs 41
3.4 Conclusion 43 Influence des erreurs de surface sur la distorsion 44
4.1 Introduction 44 4.2 Particularités des systèmes à distorsion 46
4.2.1 Longueur focale locale 46 4.2.2 Influence sur les pupilles 51 4.2.3 Variation de l'empreinte sur une surface 56
4.2.4 Longueur focale locale et diamètre de propagation dans l'axe sagittal 57
4.2.5 Impact sur l'illumination relative 61 4.3 Tolérancement des systèmes avec distorsion 63
4.3.1 Effet des erreurs localisées 63 4.3.2 Description mathématique des erreurs sur la surface frontale 68
4.3.3 Meilleure façon de définir les tolérances de fabrication pour de tels
systèmes 75 4.3.4 Impact des erreurs de surface sur le rayon de moyenne quadratique . . 78
4.4 Conclusion 80 Imageur à grandissement localisé 81
5.1 Introduction 81 5.2 Concept de l'imageur à grandissement localisé 83
5.2.1 Idée du fonctionnement 83 5.2.2 Équation entre la forme de la surface et le rapport de grandissement . 84
5.3 Limites de performances 88 5.3.1 Amplitude requise 88 5.3.2 Ouverture maximale conservant la qualité d'image 92
5.4 Modèle virtuel 97 5.4.1 Simulations avec miroir déformable frontal 97
5.4.2 Simulations avec le miroir déformable situé entre un élément optique
XI 5.4.3 Ajustement du foyer 106 5.4.4 Distorsion du côté image 108 5.4.5 Illumination relative 112 5.5 Modèle expérimental 113 5.5.1 Montage 113 5.5.2 Résultats 115 5.5.3 Analyse et comparaison avec la théorie 121
5.6 Conclusion 123 6 Améliorations et applications 124 6.1 Introduction ; 124 6.2 Améliorations futures . 125 6.2.1 Composant actif 125 6.2.2 Qualité d'image 126 6.3 Applications potentielles 127 6.4 Conclusion 128 7 Conclusion 129 A Exemple de code .zpl pour trouver et tracer les pupilles d'entrée 133
2.1 Les 2 aberrations au 1er ordre et les 5 aberrations de Seidel au 3e ordre . . . . 17
4.1 Propriétés des quatre systèmes utilisés en exemple 45 4.2 Caractéristiques des déformations gaussiennes pour les quatre systèmes . . . 66
5.1 Pour plusieurs valeurs des paramètres importants, caractéristiques de la zone
d'intérêt et de la zone de redressement 91 5.2 Pour plusieurs valeurs des paramètres importants, valeurs de RdG et coulure
totale 92 5.3 Pour plusieurs valeurs du paramètre Lj, caractéristiques du miroir du côté
image pour produire de la distorsion 110
Table des figures
1.1 Le ménisque de Wollaston 2 1.2 Simulations de facteurs 1, 2 et 4 de grandissement dans la zone d'intérêt . . . 3
1.3 Simulations montrant l'utilisation de la distorsion comme un outil en imagerie. 4 1.4 Surface optique où trois champs subissent des effets différents à cause des
irrégularités 5 2.1 Exemple avec deux lentilles classiques montrant que le grandissement
angu-laire dépend du champ de vue total 9 2.2 Effet d'un facteur 2 sur le nombre de pixels dans chacune des dimensions sur
une charte de résolution 11 2.3 Le diaphragme d'ouverture, la pupille d'entrée paraxiale et la pupille de sortie
paraxiale 12 2.4 L'empreinte de faisceau pour plusieurs champs sur la surface frontale d'une
lentille fisheye 13
2.5 Interface graphique du logiciel ZEMAX 15 2.6 Une lentille simple produisant des aberrations géométriques 16
2.7 Distorsion de Seidel 18 2.8 Exemple de plusieurs types de distorsion localisée 19
2.9 Zone de grandissement augmenté et redressement de l'image grâce à la
dis-torsion bien calibrée 21 2.10 De la défocalisation positive, nulle et négative 22
2.11 Tache d'Airy causée par la diffraction d'une ouverture circulaire 23
2.12 Structure périodique à quatre niveaux 23 2.13 Les trois régimes de fréquence pour les erreurs de surface 25
2.14 Diamètre du faisceau comparativement à celui d'une lentille pour plusieurs
surfaces 26 2.15 Les variables utiles dans la norme ISO 10110 27
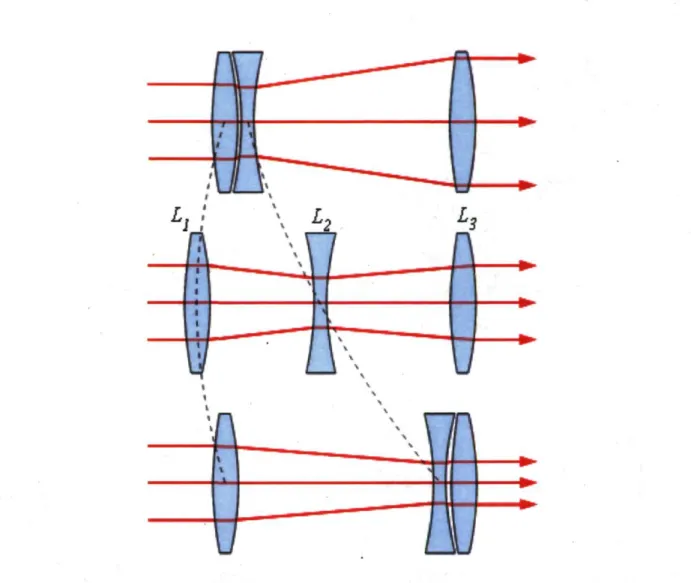
3.1 Schéma simplifié illustrant le fonctionnement d'une lentille à zoom standard . 31
3.2 Interface graphique suite à la combinaison de deux caméras 32
3.3 Système d'imagerie à zoom actif 33 3.4 Zone d'intérêt créée par un système à fovéa 33
XIV
3.5 Zone de grandissement augmenté avec une lentille Panomorphe 34 3.6 Résultats obtenus avec un système d'imagerie à miroir flexible 35
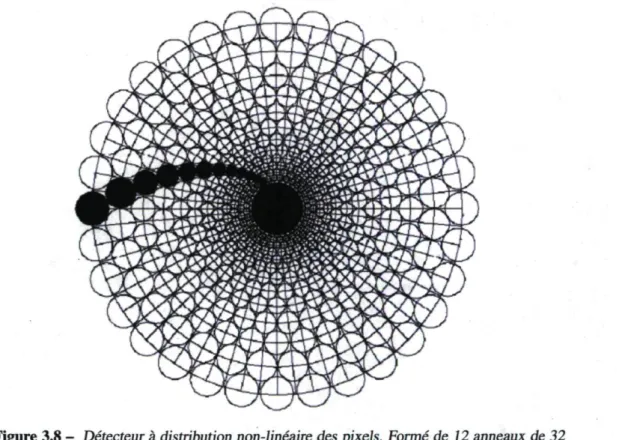
3.7 Le principe de la super-résolution 36 3.8 Détecteur à distribution non-linéaire des pixels 37
3.9 L'utilisation de deux senseurs pour produire une zone d'intérêt 38
3.10 Miroir déformable commercial de la compagnie Alpao 39 3.11 Miroir déformable ferrofluidique utilisé pour le prototype de l'IGL 40
3.12 Schéma illustrant le fonctionnement d'un micro-miroir 40 3.13 Un modulateur spatial de lumière à base de cristaux liquides commercial de
la compagnie Holoeye 41 3.14 Schéma illustrant le principe d'une lentille liquide 42
3.15 Une roue à filtre commerciale de Tofra Inc, similaire à ce qui pourrait être
utilisé pour supporter plusieurs lentilles avec des déformations localisées . . . 42
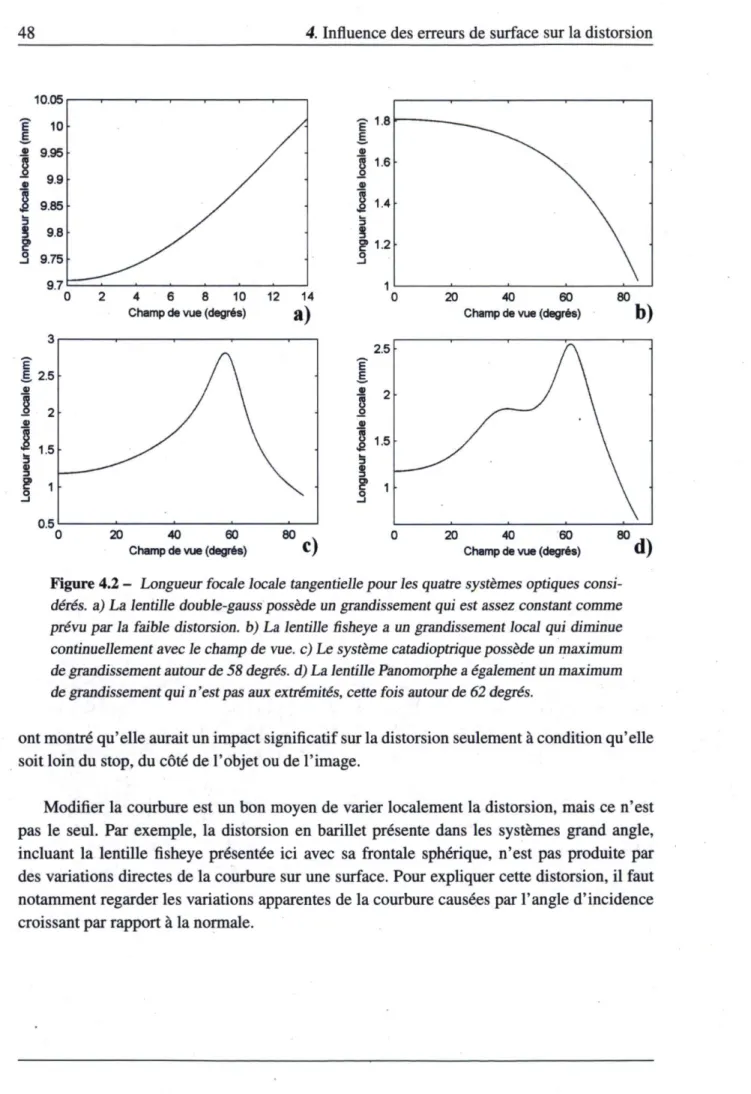
4.1 Schéma optique des quatre systèmes utilisés en exemple 45 4.2 Longueur focale locale tangentielle pour les quatre systèmes optiques
consi-dérés 48 4.3 Courbure de la surface frontale asphérique en fonction de la position radiale r 49
4.4 Courbure de la surface frontale asphérique en fonction de l'angle 6 du
rayon-chef qui frappe la surface à cette position 49 4.5 Position radiale r sur la surface frontale en fonction du champ de vue 0 pour
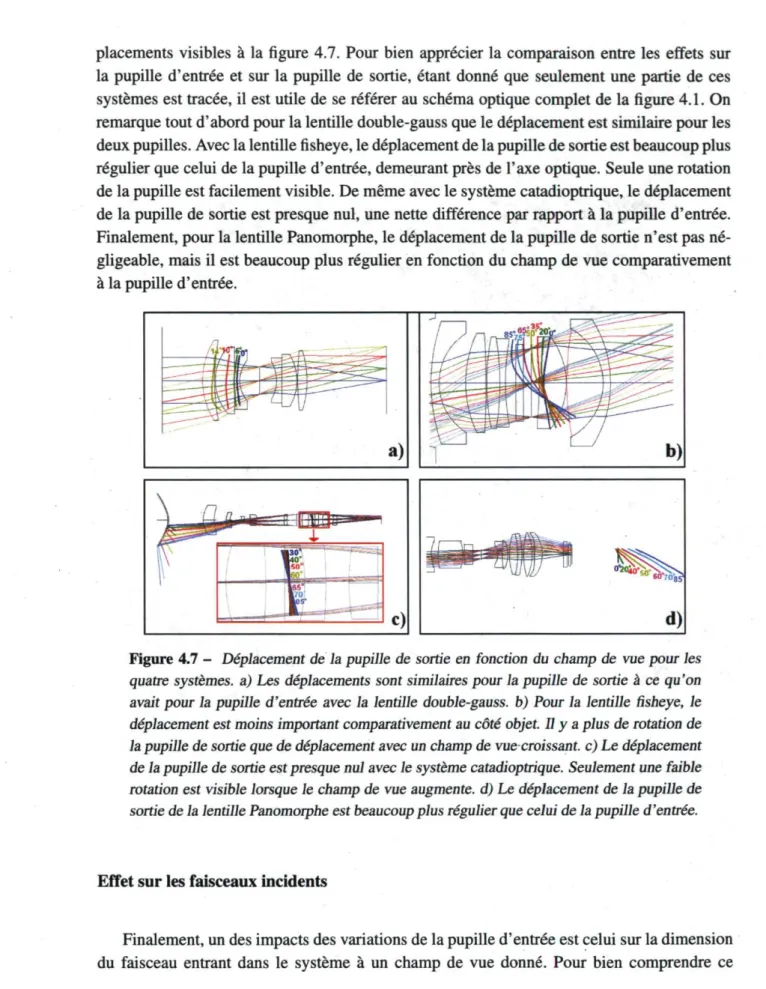
les quatre systèmes 50 4.6 Déplacement de la pupille d'entrée en fonction du champ de vue pour les
quatre systèmes 52 4.7 Déplacement de la pupille de sortie en fonction du champ de vue pour les
quatre systèmes 53 4.8 Schéma illustrant les diamètres de propagation et d'empreinte sur la frontale
dans l'axe tangentiel 54 4.9 Diamètre de propagation du faisceau entrant pour les quatre systèmes . . . . 55
4.10 Diamètre dans l'axe tangentiel de l'empreinte sur la surface frontale en
fonc-tion du champ de vue pour les quatre systèmes 56 4.11 Schéma illustrant les diamètres de propagation et d'empreinte sur la frontale
dans l'axe sagittal 58 4.12 Longueur focale locale sagittale pour les quatre systèmes optiques considérés 59
4.13 Diamètre dans l'axe sagittal de l'empreinte sur la surface frontale en fonction
du champ de vue pour les quatre systèmes 60 4.14 Illumination relative pour les quatre systèmes 62 4.15 Variation relative de la longueur focale locale par rapport à la valeur initiale
à 0 degré avec des erreurs en polynômes de Zernike 64 4.16 Déplacement d'erreurs gaussiennes sur la surface optique 66
XV
4.17 Déplacement de la hauteur H de l'image avec des déformations gaussiennes
sur la surface frontale 67 4.18 Illustration du problème mathématique de trouver le déplacement AH
pro-duit par une erreur de surface ayant une pente ae 69
4.19 Angle de la normale sur la surface frontale par rapport à l'axe optique pour
les quatre systèmes 71 4.20 Déplacement de la hauteur H de l'image selon le modèle mathématique pour
les pentes des déformations gaussiennes 73 4.21 Comparaison entre le déplacement de la hauteur H de l'image selon le modèle
mathématique et avec les erreurs gaussiennes 74 4.22 Pente maximale de l'erreur permise sur la surface frontale pour produire un
déplacement de l'image de 5 /.m en fonction du champ de vue 76 4.23 Pente maximale de l'erreur permise sur la surface frontale pour produire un
déplacement de l'image de 5 pm en fonction de la position radiale r 77 4.24 Erreur sinusoïdale sur la surface frontale pour analyser l'impact sur le rayon
de moyenne quadratique 78 4.25 Impact d'une erreur sinusoïdale située sur la frontale de la lentille
Pano-morphe sur le rayon de moyenne quadratique 79
5.1 Acuité visuelle de l'oeil humain 82 5.2 Schéma du concept de l'imageur à grandissement localisé 84
5.3 Schéma du problème mathématique reliant la forme de la surface au rapport
de grandissement obtenu 85 5.4 Schéma du problème mathématique reliant la forme de la surface au rapport
de grandissement obtenu lorsqu'il y a d'autres composants optiques devant
le miroir 87 5.5 Amplitude de coulure requise pour la zone d'intérêt à grandissement constant
en fonction de son rayon et de son RdG . . .' 89 5.6 Schéma montrant la coulure du miroir pour une zone d'intérêt à RdG constant
et supérieur à 1 suivie d'une zone de redressement à RdG constant et inférieur
à l 90 5.7 Les trois positions considérées pour le meilleur foyer 95
5.8 Distorsion / tan(6) lorsque le miroir produit des paraboles créant une zone
de grandissement constant 98 5.9 RdG produit en fonction de l'angle du champ de vue pour les déformations
paraboliques sur le miroir déformable 98 5.10 Simulations du rayon de moyenne quadratique en fonction du champ de vue
pour les déformations paraboliques 99 5.11 Empreinte à l'image pour quatre champs de vue 100
5.12 Aberrations transverses à l'image pour quatre champs de vue 101
5.14 Distorsion / tan(0) lorsque le miroir produit une gaussienne ayant une
am-plitude de Ag = 28.51 \im et une largeur de a = 5 mm 102
5.15 RdG produit en fonction de l'angle du champ de vue pour une déformation
gaussienne sur le miroir déformable 103 5.16 Rayon de moyenne quadratique en fonction du champ de vue avec une
gaus-sienne centrée sur l'origine 104 5.17 Rayon de moyenne quadratique en fonction du champ de vue avec une
gaus-sienne décentrée de 30 mm 104 5.18 RdG produit en fonction de l'angle du champ de vue pour les déformations
paraboliques sur le miroir déformable avec une lentille placée devant 105 5.19 Rayon de moyenne quadratique en fonction du champ de vue pour les
défor-mations paraboliques sur le miroir déformable avec une lentille placée devant 106 5.20 Rayon de moyenne quadratique en fonction du champ de vue après une
refo-calisation 107 5.21 Aberrations transverses à l'image pour quatre champs de vue après une
refo-calisation 107 5.22 Schéma du problème mathématique reliant la forme de la surface au RdG
obtenu, du côté image 108 5.23 RdGtotai obtenu en combinant deux surfaces actives, une du côté objet et une
du côté image 111 5.24 Rayon de moyenne quadratique obtenu en combinant deux surfaces actives,
une du côté objet et l'autre du côté image 111 5.25 Comparaison de l'illumination relative en fonction du champ de vue pour
1TGL avec une zone de grandissement modifié par rapport à l'originale . . . 112
5.26 Schéma du montage expérimental pour tester 1TGL 113 5.27 Exemple de référence, lorsque le miroir déformable est plat, pour les photos
prises par le système 114 5.28 Les 7 photos prises avec plusieurs facteurs d'échelle pour les déformations
paraboles 116 5.29 Positions absolues et relatives des différentes cibles pour les déformations
paraboliques 117 5.30 RdG expérimentaux pour les déformations paraboliques 117
5.31 Les 8 photos prises avec plusieurs facteurs d'échelle pour les déformations
gaussiennes 118 5.32 Positions absolues et relatives des différentes cibles pour les déformations
gaussiennes 119 5.33 RdG expérimentaux pour les déformations gaussiennes 119
5.34 Les 5 photos prises avec des positions différentes pour les déformations
gaus-siennes 120 5.35 Deux exemples de photos prises avec plusieurs zones de grandissement modifiél21
XVII
5.36 RdG moyens dans la zone centrale de la figure 5.30 pour les déformations
Ag Amplitude des déformations gaussiennes.
Ap Amplitude des déformations paraboliques.
DEp Diamètre de la pupille d'entrée.
DEP0 Diamètre de la pupille d'entrée uniquement de l'imageur, sans tenir compte de
l'effet créé par les surfaces actives. Dm Diamètre du miroir déformable.
DPO Abréviation de Différence de Parcours Optique. / Longueur focale d'un système optique.
f0 Longueur focale originale de l'imageur.
/e Longueur focale d'une lentille placée avant la surface active du côté objet pour
amplifier les déviations angulaires.
fi Longueur focale d'une lentille placée après l'imageur, pour créer de la distorsion du côté image.
/ / # Nombre f, défini comme étant égal à f
/DEP-H /DEP-Hauteur par rapport à l'axe optique à laquelle frappe un rayon spécifique à la sur-face image.
Hchef Hauteur par rapport à l'axe optique à laquelle frappe réellement le rayon-chef pour
un champ donné à la surface image.
Hmax Hauteur par rapport à l'axe optique à laquelle frappe le rayon maximal à la surface image.
Hr Hauteur par rapport à l'axe optique à laquelle frappe un rayon spécifique à la
sur-face image. Un indice r signifie que ce rayon frappe la sursur-face active à une position r.
Href Hauteur par rapport à l'axe optique à laquelle devrait frapper le rayon-chef pour
un champ donné à la surface image.
IGL Abréviation d'imageur à Grandissement Localisé.
L0 Distance entre la pupille d'entrée de l'imageur et la surface active.
XIX
Li Distance entre la pupille de sortie de l'imageur et un autre élément optique ayant une focale /*.
LFL Abréviation de Longueur Focale Locale.
/// Longueur focale locale pour un champ 9 donné. MTF Abréviation de Modulation Transfert Function. n Indice de réfraction d'un matériau.
PSF Abréviation de Point Spread Function.
r Position radiale sur une surface optique mesurée par rapport à son centre. rZi Rayon de la zone d'intérêt.
fzR Rayon de la zone de redressement. R Rayon de courbure d'un front d'onde. RdG Abréviation de Rapport de Grandissement.
RdG(r) Rapport de grandissement à une position r donnée sur la surface active. Il est défini à l'équation 5.4.
RdGmax Valeur maximale du rapport de grandissement dans tout le champ de vue.
RdG Valeur du rapport de grandissement dans un cas particulier où remplace les indices suivants : ZI pour la zone d'intérêt, ZR pour la zone de redressement, objet pour sa valeur uniquement due à la distorsion du côté objet, image pour sa valeur uniquement due à la distorsion du côté image et total pour le système au complet.
RMS Abréviation de Root Mean Square.
z Coordonnée parallèle à l'axe optique, servant à donner l'amplitude des surfaces optiques.
z' Dérivée première de la coordonnée parallèle à l'axe optique, servant à donner la pente des surfaces optiques.
z" Dérivée seconde de la coordonnée parallèle à l'axe optique, servant à donner la courbure des surfaces optiques.
ZI Abréviation de Zone d'Intérêt.
ZR Abréviation de Zone de Redressement.
ae Angle par rapport à la surface d'un prisme représentant une erreur localisée.
a Paramètre valant a = — 2La pour le cas réflectif et a -= +(n — 1)L0 dans le cas
réfractif.
ôz Déplacement du plan image lors de la refocaliation.
AH Déplacement de la hauteur H sur l'image produite par une erreur ae.
9 Angle par rapport à l'axe optique pour un champ de vue spécifique dans l'espace objet.
Qmax Angle par rapport à l'axe optique pour le champ de vue maximal dans l'espace objet.
9r Angle par rapport à l'axe optique pour un champ de vue spécifique dans l'espace
objet. Un indice r signifie que ce rayon frappe la surface active à une position r. A Longueur d'onde de la lumière.
p Position radiale à l'intérieur d'un faisceau ou pour un front d'onde, mesurée par rapport au rayon-chef pour ce faisceau.
pmiroir Position radiale à l'intérieur d'un faisceau ou pour un front d'onde lorsqu'il frappe le miroir déformable, mesurée par rapport au rayon-chef pour ce faisceau.
a Paramètre de largeur des déformations gaussiennes qui est analogue à l'écart-type pour une distribution gaussienne.
T Paramètre géométrique lorsqu'un élément de focale fe est placé devant la surface
active. Il est défini à l'équation 5.29.
<p Angle par rapport à 1 ' axe optique pour un rayon visant la pupille d'entrée de 1 ' ima-geur, après une première réflexion ou réfraction.
4>r Angle par rapport à l'axe optique pour un rayon visant la pupille d'entrée de
l'ima-geur, après une première réflexion ou réfraction. Un indice r signifie que ce rayon frappe la surface active à une position r.
<&jv Angle par rapport à l'axe optique que fait la normale à la surface. ip Angle par rapport à la surface au repos que fait la surface active.
tpT Angle par rapport à la surface au repos que fait la surface active. Un indice r signifie
qu'un rayon frappe la surface active à une position r. il Paramètre de la régression effectuée à la figure 5.36.
Chapitre 1
Introduction
Mise en contexte
Les systèmes optiques conçus par l'être humain sont toujours de plus en plus perfor-mants, autant grâce aux nouvelles découvertes dans le domaine de la conception optique qu'aux techniques de fabrication modernes. Pour se convaincre de l'évolution, on n'a qu'à penser aux premières lunettes ou aux premiers télescopes qui étaient composés d'un ou deux éléments optiques et qui produisaient des images simples, sans que leurs concepteurs se sou-cient des aberrations. À titre d'exemple, la figure 1.1 montre un ménisque de Wollaston, souvent considéré comme la première lentille photographique développée en 1812, 25 ans avant l'invention de la photographie [1]. Les premiers développements théoriques en op-tique géométrique remontant aux années 1800, le domaine de recherche a grandement eu le temps d'évoluer depuis [2]. Un des grands pas dans l'avancement de la conception optique est sans aucun doute l'apparition des ordinateurs et des logiciels de conception optique, qui permettent aujourd'hui de tracer des rayons et de faire d'autres opérations mathématiques sur les systèmes optiques à une vitesse absolument incomparable aux calculs manuels. Cette nouvelle technologie permet maintenant aux concepteurs optiques de réaliser des lentilles modernes, utilisant au besoin des matériaux ou des composants optiques possédant des pro-priétés variables temporellement. L'imageur proposé dans ce projet est un bon exemple d'un tel système optique moderne.
Stop
Axe optique
Ménisque de Wollaston, 1812
Figure 1.1 - Le ménisque de Wollaston. Avec un champ de vue total de 50 degrés et fonc-tionnant à f/16, il est souvent considéré comme étant la première lentille photographique.
Problématique et but
Pouvoir augmenter le grandissement dans une certaine zone d'intérêt est potentiellement très utile. Par exemple, au niveau des systèmes à zoom, on peut y parvenir par des moyens numériques ou optiques, créant dans les deux cas une image agrandie de ce qui est important. Cependant, seul le zoom optique augmente réellement la quantité d'information de l'image en augmentant le nombre de pixels efficaces dans cette zone. Par contre, il est actuellement impossible de produire ce zoom optique en utilisant un seul détecteur sans modifier le champ de vue observé. Le but de ce projet de doctorat est alors de concevoir un système d'imagerie dont le grandissement est variable localement dans certaines zones de l'image tout en conser-vant potentiellement le champ de vue total constant. La stratégie à utiliser pour concevoir cet imageur à grandissement localisé (IGL) est de modifier en temps réel la distorsion du système, donc le grandissement local, à l'aide d'un composant optique actif.
Corps de la thèse
La présente thèse est divisée en sept chapitres, incluant l'actuelle introduction. Les pro-chains paragraphes décrivent brièvement le contenu de chacun des chapitres, tout en débutant la présentation de certains concepts et résultats pour permettre de mieux saisir la probléma-tique.
Le chapitre 2 présente plusieurs concepts de base et théoriques en conception optique afin de mieux comprendre le problème avant d'aborder le vif du sujet. Plus particulièrement, on commence à expliquer les liens entre le champ de vue et le grandissement, montrant que dans un système classique, on ne peut augmenter l'un sans réduire l'autre. Pour bien comprendre dès maintenant pourquoi le but de ce projet est de modifier le grandissement dans une zone
Figure 1.2 - Simulations de facteurs 1,2 et 4 de grandissement dans la zone d'intérêt. Au bas, le visage de Lena est présenté avec différents grandissements. Étant donné que l'image est en deux dimensions, le nombre de pixels dans cette zone est ainsi 4 et 8 fois plus élevés que sur l'image originale.
d'intérêt, la figure 1.2 montre un exemple d'une amélioration par des facteurs de 2 et 4 le grandissement d'une image par un moyen optique, permettant ainsi de mieux reconnaître les détails importants. Ensuite, on explique des concepts importants pour un IGL comme les pupilles et l'empreinte d'un faisceau sur une surface spécifique. Le chapitre poursuit avec une description des aberrations géométriques et de la diffraction. La partie la plus importante de cette sous-section est celle sur la distorsion, qui explique pourquoi cette dernière ne doit pas être considérée comme étant nécessairement mauvaise. Elle est parfois un outil utile comme le montre la figure 1.3. En effet, la distorsion, parfois définie comme une variation à travers l'image du grandissement, est une aberration qui n'affecte pas la qualité d'image mais seulement la position d'un point spécifique de l'objet dans le plan image. Cela permet de l'utiliser dans 1TGL pour atteindre le but de cette thèse. La dernière section de ce chapitre 2 discute des erreurs de surface, en montrant les trois régimes utilisés pour les séparer. De plus, on explique à cette section, comme le montre la figure 1.4, que lorsque l'empreinte est petite par rapport à la dimension de la surface optique totale, les irrégularités peuvent avoir des effets différents sur chaque champ de vue distinct. On termine avec une présentation de la norme ISO 10110 actuellement utilisée pour définir les limites de tolérancement.
Figure 1.3 - Simulations montrant l'utilisation de la distorsion comme un outil en ima-gerie. Elle est obtenue à l'aide du Panomorph Geometrical Model Simulator [3]. Dans les deux images, le champ de vue horizontal est de 140 degrés, mais avec des zones d'intérêt différentes. L'image du haut a un grandissement de 11 pixels par degré dans le centre qui diminue jusqu'à 3 pixels par degré sur les bords. Dans l'image du bas, c'est l'inverse, on a 11 pixels par degré sur les bords et 3 pixels par degré au centre.
Le chapitre 3 débute par une présentation des systèmes optiques existants qui ont des caractéristiques similaires à 1TGL. On y voit que parmi les alternatives actuelles, il y a la solution d'augmenter l'information dans la partie intéressante de l'image en diminuant le champ de vue total comme dans les lentilles à zoom. La conséquence est de perdre totale-ment l'information sur l'objet à l'extérieur de la zone d'intérêt, créant des zones aveugles qui sont inacceptables par exemple en surveillance. Ensuite, on peut utiliser plusieurs systèmes d'imagerie dont certains sont concentrés sur la zone intéressante. Cette idée n'est cependant pas toujours pratique puisque la mise en commun de l'information provenant de plusieurs détecteurs est délicate, les coûts associés à plusieurs dispositifs sont considérables et la
flexi-Champ #1
Champ #2
Champ #3
Figure 1.4 - Surface optique où trois champs subissent des effets différents à cause des irré-gularités. Dans les systèmes où la distorsion est importante, cet effet est important puisque la condition que l'empreinte est petite par rapport au diamètre de la surface est souvent présente. (Source [4])
bilité est faible, autant sur la position, le nombre ou le grandissement des zones d'intérêt. Cette section présente également des systèmes optiques dit à fovea, qui utilisent un compo-sant actif dans la pupille pour corriger les aberrations dans une partie intérescompo-sante de l'objet. Par contre, ces dispositifs augmentent seulement la qualité d'image dans ces zones et non le grandissement. On explique également dans ce chapitre que des lentilles actuelles de type Pa-nomorphe utilisent déjà la distorsion pour modifier le grandissement dans le champ de vue et pourquoi il serait pratique de pouvoir faire la même chose de façon dynamique avec un IGL. L'utilisation des techniques de super-résolution est ensuite détaillée. Dans ces dernières, on prend plusieurs images de l'objet en effectuant des micros déplacements du détecteur et on combine les résultats grâce à des algorithmes au niveau logiciel. Une dernière solution ac-tuelle est d'améliorer la précision du capteur en augmentant le nombre de pixels sur celui-ci. Par contre, même si cette tendance est visible dans l'évolution récente des caméras, cela augmente inutilement la quantité d'information captée et enregistrée dans les zones moins intéressantes. Ceci requiert également soit de plus grands composants optiques si c'est la di-mension du détecteur qui augmente, soit une complexité et précision croissante pour conser-ver la qualité d'image lorsque c'est la taille des pixels qui est réduite. Bref, en comprenant les avantages et les inconvénients des systèmes actuels, on pourra mieux comprendre l'utilité des IGL. Ce chapitre 3 offre finalement une description de certains composants optiques actifs, comme les miroirs déformables continus et segmentés, les modulateurs spatiaux de lumière ou d'autres composants modernes.
Le chapitre 4 expose ensuite certaines contributions originales effectuées lors de ce projet sur la conception de systèmes avec de la distorsion contrôlée. Tout d'abord, on définit le
concept de la longueur focale locale, un indicateur du grandissement qui change en fonction du champ de vue. À l'aide de cette définition, on compare ensuite sa variation au travers le champ de vue avec l'influence sur la position et la dimension des pupilles. On voit que ces effets sur les pupilles font que l'empreinte pour un certain champ de vue change lorsqu'on se déplace sur une surface optique donnée, ce qui a des influences. Pour bien les analyser, on regarde l'impact d'erreurs générées par des polynômes de Zernike ainsi que des erreurs de formes gaussiennes sur quatre systèmes optiques typiques. À partir des découvertes de cette section, un modèle mathématique est développé, permettant ainsi de prévoir les impacts sur la distorsion des erreurs sur les surfaces frontales. On peut ainsi mieux définir les tolérances de fabrication de ces surfaces optiques.
La partie principale de cette thèse est le chapitre 5, où 1TGL est démontré. Il contient tout d'abord une description du fonctionnement de cet imageur. Ensuite, à partir de schémas simplifiés de la situation, une description mathématique est fournie, avec des approximations utiles dans certaines conditions. Les équations les plus utiles de cette section sont celles re-liant une valeur appelée le rapport de grandissement à la forme de la surface optique active. De plus, à partir du modèle mathématique, des équations sur les limites fondamentales de ces imageurs sont fournies, principalement sur l'amplitude requise de la surface active et du / / # requis pour s'assurer de conserver la qualité d'image. Des simulations à l'aide d'un modèle virtuel effectuées avec le logiciel ZEMAX suivent, en utilisant un miroir déformable pour contrôler la distorsion. Ces simulations permettent de comparer la théorie mathématique dé-veloppée à ce qui se produit réellement dans ces systèmes. La dernière section de ce chapitre présente finalement des résultats expérimentaux obtenus avec un prototype de 1TGL. Plu-sieurs types de déformations sont produites sur le miroir déformable ferrofluidique, créant des zones d'intérêt de différentes formes et rapports de grandissement. Bref, ce chapitre 5 est la réponse à la problématique principale de cette thèse et au terme de ce dernier, le but est atteint.
Le chapitre 6 fournit ensuite une brève discussion, tout d'abord sur certaines améliora-tions futures à effectuer sur ces imageurs. On y énumère des moyens pour réduire les besoins sur les composants actifs ainsi que des stratégies pour vaincre les limites fondamentales qui affectent la qualité d'image. Ensuite, on explique certaines applications potentielles à un IGL, notamment en sécurité et surveillance.
Finalement, le dernier chapitre conclut le travail avec un rappel des résultats les plus importants et une enumeration de ce qu'il faut retenir au terme de cette thèse.
Chapitre 2
Concepts de base en conception optique
2.1 Introduction
Ce chapitre de préparation sert tout d'abord à décrire quelques concepts de base en conception optique qui seront utiles tout au long de cette thèse, soit le champ de vue, le grandissement angulaire, le diaphragme d'ouverture, les pupilles, l'empreinte de faisceau, l'ouverture et le rayon-chef. Ensuite, deux autres concepts font chacun l'objet d'une section étant donné leur importance dans le présent projet, soit les aberrations optiques ainsi que le to-lérancement des erreurs de surface. Pour les aberrations, on débute par une brève description de celles dites du premier et du troisième ordre. Une analyse plus détaillée de la distorsion, de la défocalisation ainsi que de la diffraction suit. Puis, pour ce qui est de la section sur le tolérancement des erreurs de surface, on y explique les trois régimes d'erreurs en plus de présenter la norme actuelle pour les définir.
2.2 Conception optique
Ce projet de doctorat étant dans le domaine de la conception optique, il est tout naturel de commencer ce chapitre sur les bases théoriques par une brève description de certains concepts élémentaires qui seront utilisés au cours de cette thèse, permettant ainsi par la même occasion de définir certaines variables utilisées tout au long de ce travail. Le but n'étant pas d'offrir une description complète et détaillée sur la conception optique, il est conseillé de consulter des ouvrages de référence si plus d'information est requise [5] [6].
2.2.1 Champ de vue et grandissement
Puisque le but de ce projet est de modifier le grandissement localisé, on amorce cette section par son explication ainsi que celle du champ de vue.
Champ de vue
Lorsqu'un système optique capture une image de son environnement, il est généralement limité à une sous-région de celui-ci. Comme on peut le voir dans l'exemple de la figure 2.1, pour deux lentilles ayant un objet à l'infini, seulement une certaine région angulaire est ima-gée par chaque système et on appelle cette région le champ de vue total. Il est de 200° pour la lentille fisheye en a) et de 30° pour la lentille double-gauss en b). À l'intérieur de cette ré-gion angulaire, on peut retrouver une infinité de rayons provenant d'une continuité d'angles différents, mais on se limite généralement à tracer que certains de ces angles (respectivement 4 et 3 dans l'exemple de la figure 2.1). On nomme ces angles à l'intérieur du champ de vue total les champs angulaires ou tout simplement les champs ou les champs de vue, représentés par la variable 9 à partir de maintenant. Lorsque l'objet est situé assez loin tel qu'on peut l'approximer comme étant à l'infini, on considère que pour un point donné de l'objet (un champ), tous les rayons entrant dans le système le font avec le même angle 9. Le champ angulaire maximal, généralement égal à la moitié du champ de vue total, est quant à lui noté 9' m a x m„.r dans cette thèse.
Parfois, la distance entre l'objet et la lentille est faible par rapport à la longueur focale de celle-ci. On ne peut alors plus le considérer à l'infini. Dans ce cas, les champs sont définis en fonction de la hauteur de l'objet plutôt qu'angulairement et on ne peut plus dire que tous les rayons d'une même position sur l'objet entrent dans le système avec un même angle. Par contre, dans le présent projet, étant donné les faibles longueurs focales des lentilles en jeu,
2.2 Conception optique
l'objet sera toujours relativement assez éloigné pour être considéré à l'infini.
6max=l
30 degrés
sur 1024
pixels =34.1p/
cb)
Figure 2.1 - Exemple avec deux lentilles classiques montrant que le grandissement angu-laire dépend du champ de vue total. Elles ont des champs de vue différents et un détecteur identique, ayant par conséquent un grandissement angulaire différent, a) Pour une lentille de type fisheye ayant un champ de vue total de 200°, le grandissement angulaire moyen est faible, soit de 5.1 pixels/0, b) Pour une lentille de type double-gauss ayant un champ de
vue total de 30°, le grandissement angulaire moyen est plus élevé, soit de 34.1 pixels/0.
Le champ de vue maximal est souvent déterminé par un composant dans le système qui agit en tant que diaphragme de champ (field stop), la plupart du temps la dimension physique du détecteur. Cependant, dans certains systèmes grand angle, il n'y a pas de tel composant et le champ de vue maximal est limité par le design et l'illumination.
Grandissement angulaire
Une conséquence directe du champ de vue total d'un système est le grandissement an-gulaire qu'il produit. On définit ici le grandissement anan-gulaire (simplement grandissement à partir de maintenant) comme étant la dimension du détecteur divisée par le champ de vue to-tal. Cette valeur est parfois appelée échelle spatiale (plate scale) ou bien résolution, même si ce dernier terme est à proscrire [7] pour éviter la confusion avec le pouvoir de résolution d'un imageur. Elle est également indirectement reliée à ce qu'on appelle le champ de vue instan-tané (instantaneous field of view), soit le champ de vue observé par la dimension d'un pixel. Plus ce grandissement est haut, plus on peut retirer d'information sur les hautes fréquences spatiales de l'objet. On peut voir à la figure 2.1 que le grandissement moyen (en pixels/degré) varie grandement entre la lentille double-gauss et la lentille fisheye avec un même détecteur. Cependant, une telle définition du grandissement moyen, qui ne dépend que du nombre total de pixels et du champ de vue, n'est pas idéale lorsque le grandissement change localement avec le champ de vue. Une meilleure définition, celle de la longueur focale locale, sera pré-sentée à la sous-section 4.2.1.
Pour bien visualiser l'impact d'une augmentation de grandissement dans une image, la figure 2.2 montre l'effet d'un facteur 2 en nombre de pixels dans chacune des deux dimen-sions sur une charte de résolution comme la charte ISO 12233. L'image du haut ayant une plus haute résolution, elle permet de mieux voir les hautes fréquences spatiales et ainsi éviter le repliement de spectre (aliasing) [8].
2.2.2 Diaphragme d'ouverture, pupilles, empreinte de faisceau,
ouver-ture et rayon-chef
Plusieurs concepts de conception optique reliés au nombre de rayons entrant dans le sys-tème pour un champ de vue donné seront utiles lors de ce projet et cette sous-section permet de s'assurer qu'ils sont bien compris.
Diaphragme d'ouverture
Quel que soit le système d'imagerie, il y a nécessairement un composant physique dans le système qui limite la quantité de lumière atteignant le détecteur en limitant l'angle solide des rayons provenant d'un point objet qui passent dans le système. Parfois la dimension finie des lentilles, d'autres fois un iris ajouté expressément pour avoir cette fonction, on appelle ce
2.2 Conception optique 11
10 8
10
Figure 2.2 Effet d'un facteur 2 sur le nombre de pixels dans chacune des dimensions sur une charte de résolution. L'image du haut a 4 (2x2) fois plus de pixels d'information que celle du bas, permettant de voir plus facilement les hautes fréquences spatiales. Dans ■ l'image du bas, du repliement de spectre (aliasing) est visible à partir du chiffre 5 pour les lignes obliques, ce qui donne l'impression qu'elles sont dans l'autre sens.
composant le diaphragme d'ouverture (aperture stop) ou simplement le stop à partir de main tenant. À titre d'exemple, cette position est identifiée par la mention STOP aux figures 2.1 et 2.3. L'intérêt de ce composant est que seulement les rayons passant à travers celuici sont importants pour l'image. On peut alors identifier un rayon précis dans le système simplement en donnant sa position à l'objet et sa position à l'intérieur de ce diaphragme.
Pupilles
Aussi importantes que le stop, les pupilles d'entrée et de sortie du système sont définies comme l'image du stop tel que vu respectivement à partir du côté objet et du côté image. Cela signifie entre autres que si des rayons réussissent à passer à l'intérieur du stop, il faut nécessairement qu'ils visent la pupille d'entrée du système avant d'atteindre le premier com posant optique, sans toutefois nécessairement passer physiquement par cette pupille si elle est située après la première surface optique. La figure 2.3 montre ces trois plans, le stop et les deux pupilles, pour une lentille de type doublegauss. On voit bien à cette figure que si on prolonge les rayons provenant du côté objet, ils pointent bien vers la pupille d'entrée. La définition usuelle de ces pupilles considère que leurs positions et dimensions sont calculées avec le champ sur l'axe optique. Comme on le verra à la section 4.2.2, une extension à cette définition standard est requise lorsqu'elles varient avec le champ de vue, notamment dans les
systèmes avec une distorsion contrôlée comme dans le présent projet.
(Tenttiee
Figure 2.3 - Le diaphragme d'ouverture, la pupille d'entrée paraxiale et la pupille de sortie paraxiale. Par définition, la pupille d'entrée est l'image du stop tel que vu du côté objet alors que la pupille de sortie est son image à travers le côté image. Également sur cette figure, les rayons-chefs pour les trois champs utilisés sont identifiés par la notation R-C et sont tracés en gras.
Empreinte de faisceau
Une conséquence directe de la dimension du stop est la forme bidimensionnelle qu'a le faisceau pour un champ donné sur une surface donnée. Appelée l'empreinte de faisceau (beam footprint), elle sert à indiquer quelle portion d'un composant optique a réellement un effet sur un champ donné puisque des rayons le traversent. Lorsque le composant optique est près du stop, étant donné que les rayons doivent remplir ce dernier, les empreintes pour tous les champs se superposent. Par contre, en s'éloignant du stop comme sur la surface frontale de la lentille fisheye visible à la figure 2.4, la dimension de l'empreinte peut devenir beaucoup plus petite que la dimension du composant optique et les champs sont plus séparés les uns des autres. Dans le projet actuel, la dimension de l'empreinte aura un rôle fondamental sur la décision de l'endroit où placer un composant optique actif pour modifier la distorsion tel qu'expliqué à la section 5.2.
2.2 Conception optique 13
OBJ: 20.00 (deg) OBJ: 40.00 (deg)
Figure 2.4 - L'empreinte de faisceau pour plusieurs champs sur la surface frontale d'une lentille ûsheye. Pour chaque champ tracé, l'empreinte est mise en évidence sur le schéma optique et sa forme bidimensionnelle est affichée. Pour cette lentille, les champs tracés sont bien séparés les uns des autres sur la surface frontale, signifiant que seule une section de la lentille influence un champ donné.
Ouverture f/#
Un paramètre fondamental d'un système optique est son nombre f (f-number), écrit / / # à partir de maintenant. Il est directement relié à la longueur focale et à la dimension du stop, ou plus exactement, à la dimension de la pupille d'entrée. Sa définition usuelle est donnée à l'équation 2.1. Étant normalement un paramètre initial du design optique, il est ainsi très important. Combiné avec la longueur focale, un autre paramètre initial d'un design, il impose alors la dimension du stop, des pupilles et surtout de l'empreinte du faisceau sur chaque surface.
/ / # = D / (2.1)
Le / / # est également un indicateur de la vitesse du système. Puisqu'il définit le cône de lumière qui atteint l'image, plus le rapport est petit, plus courte aura besoin d'être la du-rée d'exposition étant donné que l'éclairement est plus intense au détecteur. Néanmoins, la construction de systèmes que l'on dit rapides a pour conséquence de produire plus d'aberra-tions. En effet, la section 2.3 expliquera que plusieurs aberrations comme la défocalisation sont inversement proportionnelles au / / # et il peut parfois être plus avantageux d'avoir des systèmes plus lents en gardant volontairement plus élevé la valeur du / / # .
Rayon-chef
Le dernier concept de base relié aux rayons entrant dans le système pour un champ de vue donné à expliquer est celui du rayon-chef (chief-ray). De l'infinité de rayons partant d'un point objet, passant dans le stop et atteignant l'image, il y en a un particulièrement utile comme référence pour chaque champ de vue, soit celui qui passe par le centre du stop. Ce rayon-chef est par conséquent celui qui vise respectivement du côté objet et du côté image, la pupille d'entrée et la pupille de sortie. L'importance de ce rayon-chef dans cette thèse est tout d'abord que si l'empreinte est petite, un changement de direction appliqué sur ce dernier est en première approximation un changement de direction appliqué à tous les rayons provenant de ce champ de vue. Il sert alors à simplifier les calculs. Egalement, c'est ce rayon qui entre dans la définition de la distorsion. Pour contrôler le grandissement tel que dans ce projet, il est primordial de bien comprendre comment ce rayon se comporte dans tout le système. Afin de bien visualiser ce concept, les rayons-chefs pour les trois champs de vue dessinés sont tracés en gras et identifiés par l'abréviation R-C à la figure 2.3.
2.2 Conception optique 15
2.2.3 Logiciels de conception optique
Pour terminer cette section sur les concepts de base en conception optique, on se doit de présenter brièvement le logiciel de simulations ZEMAX utilisé tout au long de cette thèse [9]. Pour des simulations en optique géométrique, ce logiciel servant à tracer des rayons sur une multitude de surfaces permet de très bien reproduire la réalité. Pour cette raison, des vérifications expérimentales, bien que très visuelles et utiles, ne sont pas toujours requises pour conclure sur les performances possibles d'un système en optique géométrique. À titre d'exemple, la figure 2.5 reproduit l'interface graphique du logiciel ZEMAX lors d'une simu lation et montre quelques types d'analyses possibles.
E"* Edïton S y * *m t^Êk/%K I M
_ | 0 - » j S m | SP1 i Bac ; R » \ _
fe Lara D M Edite*
LOE1MFE MCETDE E O E l U p . O n F» Wavl L a , L M U h R w j O p d S a MI|FI
S3
EdK Solves VKW Help
Suxf:Type CaoKnt Radlu* T h i c k n c » Glaaa S era D i m e t e r Conic Par Oca
CBJ Standard I n f i n i t y I n f i n i t y I n f i n i t y 0.0000000 1 Standard 24.000000 1.0000000 0.0000000 U 0.0000000 z Standard 23.927055 0.5310000 BK7 6.5918309 0.0000000 = Standard 3.6306000 2.4325676 3.4303666 0.0000000 4 Standard I n f i n i t y 0.6300000 3K 3.4409370 0.0000000 5 Standard 5.3279S2S i.sesoooo 2.6597771 . 0.0000000 6 Standard 5.«77*00 0.6300000 BX7 2.239B763 0.0000000 7 Standard I n f i n i t y 3.6710000 2.0697654 3.0000000 î Standard 4.767*000 Q.3140000 S F 3 1.1106357 0.0000000 ' Standard 15.67630 0.0230000 1.0762550 0.0000000 10 Standard 2.1217000 0.7150000 s r 3 0.9312282 0.OOO0000 ' • V * Rett Curv/Diit
Upd«e Sellings ■><*»* Window Tett Zoom
A M l ,W_—^ / P-tU-UUI UIAsSBB i 3; Layout _____ Wm3o» T«t i -If m fV&.tru,
3
3
11
3
V - ^ ^ ^ ^ s ^ V \ \ ^ V \ \ ^ ■-5*^ £ ^Ci^V. ■-5*^ £ ^ ■-5*^ £ ■ ■ £ i la» a a m i^a. i w -e«.àfl5tf.mariM«fl E S j / f j ^ L f J C ^ t ^ : Tomi?jiFigure 2.5 Interface graphique du logiciel ZEMAX. Plusieurs types de simulations et analyses peuvent être faites rapidement à l'aide d'un ordinateur, comme ici des analyses sur une lentille ûsheye avec de l'information sur la distorsion, la MTF ou la tache image.
2.3 Aberrations optiques
Dans un système réel, tous les rayons d'un front d'onde donné ne parcourent pas néces-sairement la même distance optique et ne frappent pas la même position dans le plan image. Ce phénomène est bien visible avec les rayons rouges de la figure 2.6. On peut quantifier la qualité du système en fonction de ces différences de parcours optique (DPO). Une ex-pansion en série de puissance du front d'onde réel comparé à un front d'onde sphérique de référence permet de quantifier en coefficients d'aberrations la forme du front d'onde dans un système optique [10]. En symétrie de révolution, pour les aberrations transverses, seulement les coefficients impairs sont présents. On divise ici les coefficients obtenus lors de l'expan-sion en série de puissance en 3 catégories. Tout d'abord, les aberrations au premier ordre, la défocalisation (defocus) et l'inclinaison (tilt) sont généralement ajustables simplement en modifiant la position et l'orientation des éléments optiques. Leurs caractéristiques sont pré-sentées au tableau 2.1. Ensuite, au 3e ordre viennent les aberrations communément dites de
Seidel, également énumérées au tableau 2.1. Finalement, toutes les aberrations dont l'ordre est plus élevé que 3 sont parmi les aberrations dites d'ordres supérieurs. Dans cette section, on discute principalement de la distorsion et de la défocalisation, soit les deux aberrations les plus importantes dans ce projet.
Objet Lentille (Stop) Image
Figure 2.6 - Une lentille simple produisant des aberrations géométriques. Pour le champ tracé en bleu, les rayons marginaux focalisent en un point sur l'image. Pour les deux autres champs, des aberrations sont présentes.
2.3.1 Distorsion
Certaines aberrations transverses ne dépendent pas de la coordonnée du rayon dans la pupille y p. Si on modifie la valeur de ces aberrations, on affecte tous les rayons pour un champ 9 donné de la même façon. On provoque ainsi une translation dans le plan image, quelle que soit la position des rayons dans le stop. Ces aberrations n'affectent pas la qualité d'image en modifiant la dimension de la tache focale (spot size), mais changent seulement la position où cette tache est située sur le plan image.
2.3 Aberrations optiques 17
Tableau 2.1 - Les 2 aberrations au 1er ordre et les 5 aberrations de Seidel au 3e ordre. Pour
chaque aberration, en plus des équations sur le front d'onde et sur l'aberration transverse, les dépendances envers la dimension de la pupille DEP et du champ de vue total Omax sont
indiquées.
Aberration Front d'onde W= Aberration transverse Abr. trans, vs DEP Abr. trans, vs &UAX
fondre
Défocalisation W~2 0<xp2+y,2) £I 4fM WgigXp D_p
-Défocalisation W~2 0<xp2+y,2) ey = -4fm W0 2 0yp Dfp -Inclinaison (tilt) WmH yp e, = 0 - -Inclinaison (tilt) WmH yp sy = - 2 f M WmH - 9UÂX 3 ordre
Abr Sphénque W o u t x p ' + y p2)1 sx = -&fmwtnxps D E ,3 .
Abr Sphénque W o u t x p ' + y p2)1
ey = - 8 0 WO 4 CyP 3 D E P3
-Astigmatisme Wn 2H2yp 2 ex = 0 -
-Astigmatisme Wn 2H2yp 2
e > = - 4 f m WmH2yP D_p OUAX'
Coma W1,1H(xp2+y,2)yp sx = 0 - .
Coma W1,1H(xp2+y,2)yp
e> = -6jmwwifyP2 D E P2 •_*r
Courbure de champ W2 2oH2(Xp2+yp2) sx = -4fl# WmH2xp D E P &mx~ Courbure de champ W2 2oH2(Xp2+yp2)
ey = -4fmwmH2yP D E P 0\ilT~
Distorsion WmH3yP e. = o -
-Distorsion WmH3yP
sy = -2fmWillH3 - dj_r
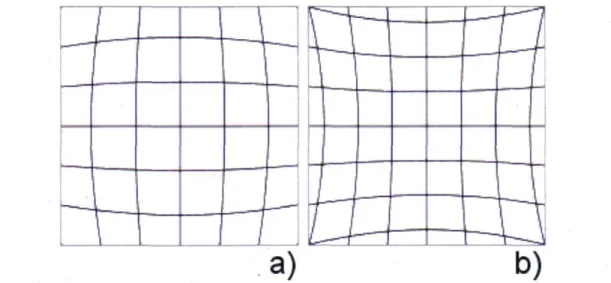
Tel que visible au tableau 2.1, l'inclinaison (également parfois appelée le grandissement) (magnification) [11]) et la distorsion de Seidel respectent cette condition. La figure 2.7 montre un exemple de distorsion de Seidel positive et négative. Visuellement, à cause du grandisse-ment variable à travers l'image, de la distorsion fait qu'une ligne droite dans l'objet apparaît courbée dans l'image.
Plus généralement, tous les termes du front d'onde en W = Wn\\Hnyp pour n >= 1
peuvent être appelés de la distorsion localisée, soit une variation du grandissement à travers l'image. Cela n'inclut pas seulement les termes à symétrie de révolution, mais toute forme générale d'aberrations qui modifient le grandissement sans affecter la qualité d'image. Ceci est représenté avec plusieurs types de distorsion localisée à la figure 2.8
De façon numérique, un logiciel de conception optique peut facilement donner une valeur du pourcentage de distorsion à l'aide de la formule 2.2 [9], où HCfief est la hauteur réelle par
" j
— ■ a .
— ■ a .
j
1
1
a)
Figure 2.7 Distorsion de Seidel. a) De la distorsion négative ou de type barillet b) De la distorsion positive ou de type coussinet.
rapport à l'axe optique dans le plan image du rayonchef pour le champ 9 choisi et Href est la
hauteur prévue par les équations au premier ordre. On utilise l'équation 2.3 pour la distorsion transverse (projection rectilinéaire), où l'absence de distorsion signifie une relation directe entre la hauteur transverse de l'objet et sa hauteur transverse sur l'image, soit un grandisse ment transverse constant. On remplace parfois l'équation 2.3 par l'équation 2.4 (projection équidistante) lorsqu'on veut la distorsion angulaire, où l'absence de ce type de distorsion si gnifie une relation directe entre la hauteur angulaire de l'objet et sa hauteur transverse sur l'image, soit un grandissement angulaire constant [12].
Distorsion(%) = 100% Hchef
H
refH, ref (2.2)
Href = f t a n ( 9 ) (2.3)
2.3 Aberrations optiques 19
a)
d)
Figure 2.8 - Exemple de plusieurs types de distorsion localisée, a) L'image originale, où toutes les lignes sont droites, b) De la distorsion radiale négative au centre de l'image, ou de type barillet (barrel) c) De la distorsion radiale positive au centre de l'image, ou de type coussinet (pincushion) d) De la distorsion sans symétrie radiale positive et négative. Dans tous les cas, les carrés rouges sont de la même taille que ceux de l'image originale, montrant que la distorsion est bel et bien un changement de grandissement local.
Calibration
Bien que la distorsion soit souvent perçue comme une aberration indésirable que l'on tend à garder sous un certain % dans un design optique, il faut comprendre qu'elle peut également être une propriété désirée. Des images déformées comme à la figure 2.8 ne sont pas problématiques si on connaît bien la distorsion que produit le système optique. La raison est que la distorsion n'affecte pas la qualité d'image pour un point objet et on peut alors la corriger au niveau logiciel, à condition d'avoir bien calibré l'optique, c'est-à-dire connaître le mieux possible la fonction de transfert des positions entre l'objet et l'image. La figure 2.9 montre un exemple simulé de zone de grandissement augmenté par distorsion de l'image ainsi que l'image redressée. Etant donné la grande utilité de pouvoir redresser une image avant de la présenter à un observateur, plusieurs travaux ont été effectués sur la calibration, incluant des systèmes où la distorsion change avec le temps [13].
2.3 Aberrations optiques 21 1 1 1 1 1 \ 1 1 1 1 \ V \ \ \ \ \ \ \ M 1 1 I j*Àf IKS ■■ 1 i
*^B.Br-X-■p
•
<
H W S K I G I Z ^ ^ ^
* ' ' ^ — 1 1 1 L Ï rf fc • ' . " T *- "~ 1 1 1 1 1 " T *- "~ 1 1 1 1 1**1
_-T-lêB
**1
_-T-lêB
T**-I1 f f T~J**1
_-T-lêB
l l l l 1 M 4 1 1*1 ! 1 1 i - 1 1 1 1 1REDRESSEMENT
â
i
,-J_
^ * i jâ
i
fc: ' ■ ^ M .■arfeSK _*^* * a s ^ -w<s**
'9.* I '!KHÉ lfcfi.M.l_fesïs- a -v • ; - - . « ^ ^ ^ a » K * i I i ; V N J V ■ k1
... ., • _Figure 2.9 Zone de grandissement augmenté et redressement de l'image grâce à ia distor sion bien calibrée. Cette figure n'est qu'une simulation faite à l'aide d'un logiciel de dessin, mais il faut comprendre que si l'image avait été capturée avec une distorsion locale comme à l'image du haut, après un redressement pour obtenir l'image du bas, la quantité d'infor mation dans la zone avec le quadrillé vert serait supérieure à si on avait capturé l'image du bas directement.
2.3.2 Défocalisation
À la section 2.3, la défocalisation a été présentée comme une aberration transverse du premier ordre, signifiant qu'elle n'est pas causée par la dimension transverse des lentilles ou l'angle du champ de vue. Elle peut ainsi être présente même avec un faisceau optique paraxial. La figure 2.10 montre que si le plan image est devant ou derrière la position optimale, la dimension de la tache image augmente, créant visuellement une image floue.
Lentille paraxiale ■ Li;w.i- ' ■ ■ ■ ' ■ - ' : : ■ : ■ : ■ ' : ■ ■ ' ■ ' ■ - ' : : ■ : ■ : ■ ' : ■ ■ ' - . . . ■ • I ■ ' ■ - ' : : ■ : ■ : ■ ' : ■ ■ ' * • ' * , ■ ' ■ - ' : : ■ : ■ : ■ ' : ■ ■ ' ■ ' ■ - ' : : ■ : ■ : ■ ' : ■ ■ ' Défocalisation
positive Défocalisation négative Figure 2.10 De la défocalisation positive, nulle et négative. Au dessus du schéma, les graphiques de tranche de rayon montrent le déplacement transverse en fonction de la posi tion yp dans la pupille de sortie. Sous le schéma, l'empreinte de faisceau pour chacune des positions du plan image.
2.3.3 Diffraction
Un système optique, même s'il est complètement libre d'aberrations géométriques, ne peut jamais donner une image parfaite d'un objet à cause de la diffraction produite par la largeur finie de ses composants optiques. Un point objet est alors imagé comme une tache ayant une certaine dimension. Dans le cas des systèmes stigmatiques à pupille circulaire, cette tache est d'une forme souvent appelée la tache d'Airy. Cette dernière est visible à la figure 2.11. Une dimension utile pour quantifier cette tache est la distance entre le centre et le premier minimum d'intensité donné par l'équation 2.5. Selon le critère de résolution de Rayleigh, on peut résoudre deux objets différents s'ils sont séparés d'au moins cette distance au plan image [5].
2.3 Aberrations optiques 23
1.22 Xf/# a) 1.22 Xf/# H b)
Figure 2.11 - Tache d'Airy causée par la diffraction d'une ouverture circulaire. La distance entre le maximum et le premier minimum est donné par l'équation 2.5. a) Vue en deux dimensions, b) Coupe en une dimension.
En plus de causer qu'un faisceau passant dans une ouverture circulaire ne produit pas une image ponctuelle, la diffraction crée également des pertes de lumière en la dirigeant dans plusieurs directions lorsqu'un faisceau traverse une structure se répétant avec une période A. L'angle 9m à laquelle la lumière est dirigée pour un ordre m est déterminé par la loi de
dif-fraction des réseaux dont la formule est visible à l'équation 2.6, où $% est l'angle d'incidence
sur le réseau. Il y a alors de la lumière dispersée dans tous les ordres m entiers qui respectent l'équation. Cependant, en choisissant efficacement la structure périodique, il existe des straté-gies pour maximiser l'énergie dans un ordre choisi et ainsi réduire les pertes. Par exemple, en une dimension, si on utilise une structure périodique en escalier à quatre niveaux tel qu'illus-tré à la figure 2.12, on a une efficacité de diffraction de 81% [14]. Avec 8 ou 16 niveaux, on obtient respectivement 95% et 99% d'efficacité.
A(sin(9m) + sin(9i)) = m \ (2.6)
Figure 2.12 - Structure périodique à quatre niveaux. Dans ce cas, l'efficacité de diffraction dans Tordre principal est de 81%.
2.4 Tolérancement des erreurs de surface
Lors de la fabrication d'un composant optique, il y a nécessairement une différence entre le produit réel et ce qui était originalement prévu. Par exemple, dans le cas d'une lentille, il peut y avoir des erreurs sur les spécifications du verre comme l'indice de réfraction ou le nombre d'Abbé, les rayons de courbure peuvent différer des prévisions. Egalement, les épaisseurs peuvent varier, autant au centre que sur les bords. La lentille peut aussi être asy-métrique, décentrée, avoir des défauts localisés comme des égratignures ou de petits trous, etc. Bien sûr, selon le budget disponible, on peut augmenter le niveau de précision, mais le composant ne sera jamais parfait. L'étape de la conception qui doit prendre en compte les propriétés réelles des optiques et s'assurer qu'après la fabrication le système rencontre les performances requises s'appelle le tolérancement. Une description détaillée de cette étape de la conception serait en dehors du sujet de cette thèse et se retrouve dans plusieurs ouvrages de référence. Pour cette raison, on se limite ici à expliquer uniquement le tolérancement des erreurs de surface en préparation pour le chapitre 4.
2.4.1 Trois régimes d'erreurs de surface
Lorsqu'une surface optique est fabriquée, il y a toujours une erreur entre la surface pro-duite et celle voulue. C'est négligeable pour des surfaces sphériques étant donné leur tendance naturelle et statistique vers la sphéricité lors de la fabrication et du polissage [15]. Par contre, pour d'autres types de surface plus complexes dont les surfaces asphériques, avec ou sans symétrie de révolution, les techniques de fabrication actuelles font que ces erreurs de surface peuvent devenir plus importantes. Il est souvent utile de séparer les potentielles erreurs de surface en trois régimes, les basses fréquences spatiales, les moyennes fréquences spatiales et les hautes fréquences spatiales. Cette séparation des régimes sur les surfaces optiques est également utilisée dans plusieurs domaines d'ingénierie et plusieurs outils existent pour les qualifier et les quantifier [16]. La figure 2.13 illustre ces trois régimes.
Il existe deux façons de qualifier ces trois régimes, dépendant si on travaille dans la fabri-cation de lentille ou l'utilisation en conception optique de ces lentilles. Dans le premier cas, puisqu'en construisant une certaine surface, on ne connaît pas la dimension de l'empreinte réelle sur cette surface, on définit les régimes en fonction du diamètre total de la lentille. Dans le deuxième, ce qui détermine si une certaine erreur est dans un régime ou un autre dépend principalement de la fréquence spatiale de l'erreur en fonction de la taille de l'empreinte du faisceau. La fréquence de l'erreur en fonction du diamètre de la lentille est alors insigni-fiante. C'est cette deuxième convention qui sera utilisée ici puisqu'on s'intéresse à l'effet réel