ETIENNE NON
DETERMINATION NUMERIQUE DES SOLUTIONS DU SYSTÈME DE NAVIER-STOKES PÉRIODIQUES DANS UNE
DIMENSION SPATIALE
Thèse présentée
à la Faculté des études supérieures de l'Université Laval
dans le cadre du programme de doctorat en mathématiques et statistique pour l'obtention du grade de Philosophiae doctor (Ph.D.)
Département de mathématiques et de statistique FACULTÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL
2010
Dans cette thèse, nous développons et mettons en oeuvre une méthode numé-rique de discrétisation spatiale entièrement tridimensionnelle afin d'étudier la transition des écoulements visqueux et incompressibles dans un canal in-finiment long, d'un état stable et bidimensionnel à un état tridimensionnel. Le principe de stabilité linéaire permet de déterminer l'apparition d'une telle bifurcation et la théorie des systèmes dynamiques montre que l'écoulement au voisinage de la solution stable bidimensionnelle considérée tend alors à suivre une direction privilégiée. Dans certains cas il en résulte un écoulement tridimensionnel et périodique qu'il n'est possible de décrire qu'en adoptant une approche entièrement tridimensionnelle.
Nous avons adopté une approche combinant la robustesse de la méthode des éléments finis à la précision des méthodes de Fourier. La théorie de la méthode de discrétisation est expliquée, un code est validé en utilisant plusieurs bancs d'essai et la description qualitative du comportement local de l'écoulement après bifurcation est présentée.
Il m'est très agréable, au terme de ce travail, de dire merci ! à tous ceux qui ont contribué de près ou de loin à sa réalisation. Je pense particulièrement à mon directeur de recherche Monsieur Roger PIERRE pour sa disponibilité son attention et ses conseils tout au long de ce travail, qu'il trouve en ces mots l'expression de ma reconnaissance.
À mon codirecteur Monsieur Jean Jacques Gervais pour sa disponibilité et ses remarques pertinentes.
A Monsieur Michel Lapointe pour son aide dans le support informatique. Aux dames du secrétariat pour leurs sourires et leurs marques de sympathie. Aux camarades du laboratoire pour leurs marques d'encouragements.
À mes amis, je pense particulièrement à Michel, Annick, Luc, Catherine, Dana, Jean, Zanin, Kane, Dione, Saint-Cyr, Monia, Audrey et Ganz pour leur soutien.
TABLE DES MATIERES
R E S U M E ii R E M E R C I E M E N T S iv
LISTE DES F I G U R E S viii
I N T R O D U C T I O N 1 1 Analyse modale de la stabilité 7
1.1 Cadre mathématique 8 1.2 L'approche modale 11
1.2.1 Cadre de l'approche modale 12 1.2.2 Méthode de continuation 14
1.3 alpha = 1 5 22 1.3.1 Description du minimum autour de a — 15 23
1.3.2 Simulation numérique directe 27
2 Elements finis spectraux 31 2.1 Formulations variationnelles 32
2.1.1 Convection-diffusion 33
2.1.2 Poiseuille 36 2.2 Eléments finis 44
2.2.1 Interpolation trigonométrique, le cas complexe 44 2.2.2 Interpolation trigonométrique, le cas Réel 48
2.2.3 Éléments finis-spectraux (EFS) 52 2.2.4 Quelques résultats d'approximation 59
2.3 Intégration en temps 63 3 M É T H O D E EFS 2D 67
3.1 Convection-Diffusion 68 3.2 Navier-Stokes Stationnaire 78
3.2.1 Discrétisation du problème de Stokes en dimension 2 . 78
3.2.2 Navier-Stokes, le cas stationnaire 87
3.3 STABILITÉ DE POISEUILLE 93 3.3.1 Stabilité linéaire 1ère approche 93
3.3.2 Stabilité linéaire 2ième approche : DNS 97 4 M É T H O D E EFS E T D O M A I N E S F I C T I F S 103
4.1 Formulations variationnelles 104 4.1.1 Domaines-Fictifs 105 4.1.2 Discrétisation-Solution 109
4.2 Stabilité Linéaire 117 4.2.1 Equations du problème et stabilité linéaire 117
4.2.2 Résultats numériques 119 5 EF-Spectraux et analyse de la stabilité 129
5.1 Problème de la Cavité entraînée 130 5.1.1 La discrétisation P2 - P2 - P I B - P0 132
5.1.2 La discrétisation P2 - P2 - P2 - P I 134 5.2 Stabilité linéaire : approche tridimensionnelle 140
5.2.1 Approche tridimensionnelle versus approche modale . . 140
5.2.2 Approche tridimensionnelle : cas a = 1 143
vu
5.3.1 EFS et schéma de Gear 147 5.3.2 Écoulement post-bifurcation 150 5.3.3 Écoulement post-bifurcation : trajectoire de particules . 155
CONCLUSION 166 B I B L I O G R A P H I E 168
LISTE DES FIGURES
1.1 La cavité entraînée 8 1.2 Le triangle de sommets (0,8000), (0,8050), et (1,8050) 17 1.3 Le triangle de sommets (0,8000), (1,8050) et (1,8000) 18 1.4 Le triangle de sommets (1,8050), (1,8000) et (2,8050) 19 1.5 Le triangle de sommets (1,8000), (2,8000) et (2,8050) . . . . 191.6 La courbe de neutralité entre a = 1 et a = 20 20 1.7 La courbe de neutralité et nature des points critiques 23
1.8 Les 500 valeurs propres les plus proches de l'axe imaginaire à
a = 15.5 et Re = 784.8 24 1.9 Reconstruction de l'écoulement 3D à a = 15.5 et Re = 784.8 . 26 1.10 Reconstruction de l'écoulement 3D à a = 15.5 et Re = 784.8 . 27 1.11 Reconstruction de l'écoulement 3D k a = 15.5 et Re = 784.8 . 27 2.1 Ecoulement de Poiseuille 37
2.2 EFS P
0, N =
4
54
2.3 EFS Pi, N
= 4
54
2.4 EFS P
2,
N = 4 55
2.5 EFS 3D P
0, N
= 4
56
2.6 EFS 3D Pi,
W = 4
56
2.7 EFS 3D Pi + bulle, N = 4 57 2.8 EFS 3D P2, N = 4 583.1 Numérotation des degrés de liberté sur un élément N = 6. . . 70 ix
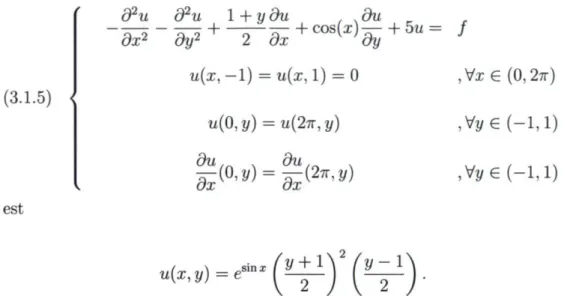
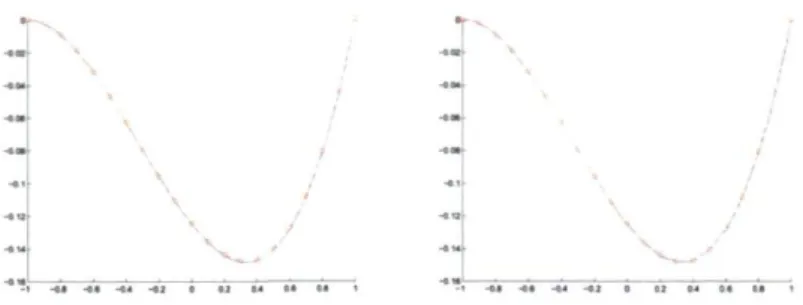
3.3 Superposition de la coupe en y = 0 de la solution du système discret et la solution exacte dans le cas complexe à gauche et
cas réel à droite nel = 10 et iV = 8 75 3.4 Superposition de la coupe en y = 0 de la solution du système
discret et la solution exacte dans le cas complexe à gauche et
dans le cas réel à droite nel = 10 et N = 16 75 3.5 Superposition de la coupe en y = 0 de la solution du système
discret et la solution exacte dans le cas complexe à gauche et
dans le cas réel à droite nel = 10 et N = 32 76 3.6 Superposition de la coupe en y = 0 de la solution du système
discret et la solution exacte dans le cas complexe à gauche et
dans le cas réel à droite nel = 10 et N = 64 76 3.7 Superposition de la coupe en x = n de la solution du système
discret et la solution exacte dans le cas complexe à gauche et
dans le cas réel à droite nel — 10 et N = 8 77 3.8 Erreur d'approximation en fonction de nel lorsque N = 32 . . 78
3.9 Première composante vitesse obtenue par discrétisation
Galer-kin Spectrale (droite) et éléments finis (gauche) 91 3.10 Partie périodique de la pression obtenue par discrétisation
Ga-lerkin Spectrale 91 3.11 Phénomène de Gibbs N = 32 et nel = 20 92
3.12 Les spectres à Re = 5700 pour L = 1.020545 EFS (à gauche)
XI
3.13 Les spectres à Re = 5750 pour L = 1.020545 EFS (à gauche)
et FEM (à droite) 96 3.14 Les spectres à Re = 5772.22 pour L = 1.020545 EFS (à
gauche) et FEM (à droite) 96 3.15 Évolution dans le temps de la perturbation à Re = 525 . . . . 99
3.16 Les positions relatives des points A, B et C, pour lesquels on
présente un plan de phase 99 3.17 Le diagramme de phase à Re = 5772.22 au point A 99
3.18 Le diagramme de phase à Re = 5772.22 au point B 100 3.19 Le diagramme de phase à Re = 5772.22 au point C 100 4.1 Canal infini traversé périodiquement par des cylindres 103
4.2 Frontières du canal de longueur L = 2ir 105 4.3 Approximation de T3 par des segments m = 10, m = 20 et
m = 40 109 4.4 Les points d'intersections du maillage avec le cercle sont les
noeuds du polygone 110 4.5 La structure de la sous-matrice de taille 2125 x 3992 avec nnz
= 50976 112 4.6 Maillage N = 64 et nel = 40 114
4.7 Les lignes de courants du champ de vitesse sur le domaine
fictif à Re = 125 115 4.8 la composante u du champ de vitesse à x = 1.9772 et x = 6.4518116
4.9 la composante u du champ de vitesse à x = 2.08125 et x = 6.5559116 4.10 Les 250 valeurs propres de plus petit module de 4.2.4 pour
4.11 Les lignes de courant du vecteur propre correspondant au
mode le moins stable à Re = 125 121
4.12 Les 250 valeurs propres de plus petit module de 4.2.4 pour
f/s(130) et un gros plan des plus proches de l'axe Oy 122 4.13 Les lignes de courant du vecteur propre correspondant au
mode le moins stable à Re = 130 123 4.14 Les 250 valeurs propres de plus petit module de 4.2.4 pour
t7s(138) et un gros plan des plus proches de l'axe Oy 124 4.15 Les lignes de courant du vecteur propre correspondant au
mode le moins stable à Re = 138 125
4.16 Les 250 valeurs propres de plus petit module de 4.2.4 pour
—*
{7,(139) et un gros plan des plus proches de l'axe Oy 127 4.17 Les lignes de courant du vecteur propre correspondant au
mode le moins stable à Re = 139 128
5.1 Structure du maillage 3D avec N = 4 et nel = 64 133 5.2 Distribution des degrés de liberté : au dessus les composantes
vitesses, au dessous la pression 136 5.3 Quelques lignes de courant de l'écoulement bidimensionnel à
Re = 790 138 5.4 Coupe transversale des trois composantes de la vitesse à Re =
790 139 5.5 Spectre à Re = 8100 et a = 1 calculé avec 2 noeuds de
collo-cation 144 5.6 Spectre à Re = 8100 et a = 1 calculé avec 4 noeuds de
xm
5.7 Spectre à Re = 2000 et a = 1 calculé avec 8 noeuds de
collo-cation 146 5.8 Spectre à Re = 790 et a — 15.5 calculé avec 4 noeuds de
collocations 148 5.9 Le champ 10 x (0, 0, ut) en z = 0 z = f z = IT Z = ^ et z = 27T 151
5.10 Coupe longitudinale des lignes de courant du champs scalaire
ui du haut vers le bas : x = 0.1 152 5.11 Coupe longitudinale des lignes de courant du champs scalaire
ui du haut vers le bas : y = 0.95 153 5.12 Les lignes de niveau des composantes transverses sur le plan
z = 3.2 154 5.13 Les lignes de niveau de la pression sur le plan z = 3.2 155
5.14 Section de la cavité et les cinq zones par lesquelles partent les
particules 156 5.15 Trajectoires des particules injectées dans le CIG 157
5.16 Trajectoires des particules injectées dans le CSG 159 5.17 Trajectoires des particules injectées dans le CSD 161 5.18 Trajectoires des particules injectées dans le CID 163 5.19 Section de la cavité et les cinq zones par lesquelles partent les
Le problème de la cavité entraînée est l'un des plus importants bancs d'essai en mécanique des fluides. Cela tient principalement à deux raisons : la sim-plicité de sa géométrie et la très grande richesse des phénomènes physiques pouvant être observés dans cet écoulement.
La simplicité de la géométrie permet notamment l'expérimentation et l'usage de différentes méthodes numériques, qui ont permis au fil des années de dégager une convergence de vue sur la nature de cet écoulement lorsque la vitesse de la face entraînante est petite. On sait par exemple que, pour un nombre de Reynolds plus petit que 400, cet écoulement est bidimension-nel et sa structure bien définie. Bien qu'expérimentalement, on avait, avant les années soixantes, une bonne idée du comportement des fluides incom-pressibles dans une cavité, c'est autour de ces années qu'apparaissent les premières approximations par simulation numérique directe sur ce sujet. Que ce soit Kawaguti 1961, Burggraf 1966 ou Pan et Acrivos 1967, elles étaient toutes basées sur la méthode des différences finies. En 1966 dans [9], O.R. Burggraf utilise les équations de Navier-Stokes pour modéliser l'écoulement et les différences finies pour le décrire à des Reynolds entre 0 et 400, pavant ainsi la voie à d'innombrables publications sur ce sujet, chacune allant de son approche ou méthode numérique avec comme seules limitations la puissance de calcul et de stockage des ordinateurs. En 1998, en utilisant une méthode de collocation spectrale de type Chebyshev, Botella et Peyret dans [7] décrivent avec une grande précision la nature de cet écoulement à Re = 1000. Les
premiers codes tridimensionnels pour décrire cet écoulement apparaissent à la fin des années 70. On les doit à De Vahl Davis et Mallinson [13], K. Goda [24] et Freitas, Street et Koseff [19]. Ils montrent tous qu'à partir d'un certain nombre de Reynolds, l'écoulement dans la cavité est tridimensionnel et donc qu'une étude bidimensionnelle pour de tels nombres de Reynolds pourrait être trompeuse. L'article de Shankar et Deshpande [31] paru en 2000 donne une revue récente des résultats numériques sur le problème de la cavité en-traînée.
La grande richesse des phénomènes physiques du problème de la cavité est aussi intéressante, notamment la transition entre les différents écoulements que l'on peut observer en augmentant progressivement la vitesse de la pa-roi entraînante. On passe ainsi d'un fluide laminaire à bas Reynolds à un fluide turbulent. Parce que numériquement moins coûteuse, la transition d'un écoulement bidimensionnel stable à un écoulement instable fut la plus étudiée. Deux outils sont généralement utilisés pour cet étude : le principe de stabilité linéaire et la simulation numérique directe. Nous pouvons citer l'étude de Natarajan et Homsy dans [25] basée sur la formulation
VORTI-CITÉ-FONCTION DE COURANT et une discrétisation par différences fi-nies. Les travaux de Fortin et al. dans [16] et Gervais et al. dans [20] basés sur une formulation VITESSE-PRESSION et la méthode des éléments finis, ont permis de calculer avec précision la première bifurcation de Hopf à Reynolds élevés. Une telle étude a aussi été l'objet de [29] et de [30] où nous construi-sons une courbe de neutralité, fonction de deux paramètres soit le nombre de Reynolds Re et le nombre d'onde a de la perturbation de l'écoulement suivant la direction longitudinale Oz. Cette courbe de neutralité décrit de
façon précise quand s'effectue la première perte de stabilité lorsque l'on part d'un écoulement bidimensionnel. Pour cela, nous avons utilisé un code bi-dimensionnel éléments finis et développé une technique de Door-In-Door-out similaire à la continuation linéaire pour obtenir son tracé dans le plan (Re, a). Nous sommes arrivés, entre autres, à la conclusion que, partant d'un écoulement bidimensionnel, lorsqu'on augmente progressivement le nombre de Reynolds, l'écoulement initialement stable devient instable à Re = 784.8, le nombre d'onde de la perturbation responsable de cette perte de stabilité est a = 15.5 et l'écoulement résultant est tridimensionnel, périodique suivant la direction Oz et stationnaire.
Ces résultats furent confirmés en 2005 par S. Albensoeder et H.C. Kuhl-mann dans [3]. Contrairement à [30], ils utilisent un code tridimensionnel et discrétisent les équations de Navier-Stokes en utilisant une méthode de collo-cation spectrale. Au lieu de monter en Reynolds, ils partent d'un écoulement tridimensionnel à Re — 1000 et descendent avec un pas de Reynolds de ÔRe = 1 jusqu'à ce que l'écoulement devienne bidimensionnel. Cela ce pro-duit à Rec = 783 ± 1 avec un nombre d'onde critique de ac = 15.43. Bien entendu il est plus avantageux d'utiliser un code bidimensionnel qu'un code tridimensionnel si en fin de compte on aboutit aux mêmes résultats, mais il faut noter que la procédure de discrétisation utilisée dans [30] n'a pas permis d'aller au de là de ce résultat, c'est-à-dire de calculer l'écoulement tridimen-sionnel et périodique dans la direction longitudinale ainsi apparu.
D'où l'objet de cette thèse : développer un code numérique entièrement tridi-mensionnel basé sur une technique variationnelle, pour étudier les écoulements présentant une direction de périodicité. L'idée principale est de conserver la
robustesse de la méthode des éléments finis utilisée dans les codes bidimen-sionnels et de la combiner à une discrétisation par une méthode de Fourier, dont la convergence est plus rapide, suivant la direction longitudinale. Nous destinons ce code à la description de l'écoulement tridimensionnel qui ap-paraît après la première perte de stabilité en augmentant progressivement le nombre de Reynolds. D'un point de vue purement numérique, cette combi-naison permet d' étendre le problème de la cavité à des geometries plus com-plexes, ce que ne permet pas a priori un code tridimensionnel entièrement spectral.
Cette idée n'est pas nouvelle, elle fut déjà utilisée par J.W. Murdock dans [28] à la fin des années 70. Il combinait alors la méthode des différences finies avec les méthodes spectrales pour étudier la stabilité non-linéaire des écoulements bidimensionnels. Au début des années 80, Canuto, Maday et Quarteroni dans [11] la reprennent, pour combiner l'interpolation de Fourier avec la méthode des éléments finis. Ils définissent un cadre fonctionnel pour ces méthodes et donnent une estimation des erreurs d'interpolation en fonction du paramètre de discrétisation h pour la méthode des éléments finis et N pour l'interpo-lation de Fourier. Ils font une analyse de convergence pour le problème de convection-diffusion. Au niveau de la mise en oeuvre, ils optent pour une combinaison éléments finis-approximation pseudospectrale consistant à faire de la collocation suivant la direction de périodicité et du variationnel dans les autres directions. Ce point est l'une des différences entre leurs travaux et ceux présentés ici. Dans [12] ils appliquent cette méthode pour approximer les équations de Navier-Stokes. Entre autres, ils montrent que la convergence est optimale et que les paramètres de discrétisation peuvent être choisis de
façon presqu'indépendante. Nous utiliserons dans cette thèse certains des résultats de [11] et [12] bien que la technique de discrétisation présentée ici soit entièrement de type Galerkin.
Cette thèse comprend 5 chapitres. Dans le premier, nous revenons sur nos travaux publiés dans [30] et précisons les motivations de la méthode de discrétisation qui sera introduite dans les chapitres suivants. Après avoir exposé le cadre général du principe de stabilité linéaire, nous introduisons une hypothèse simplificatrice qui nous conduit à l'analyse modale telle que décrite dans [30]. Nous ressortons les limites, d'un point de vue numérique, d'une telle approche et posons les bases d'une approche entièrement tridi-mensionnelle.
Dans le chapitre 2, nous introduisons une méthode de discrétisation par éléments finis spectraux (EFS) inspirée de celle de Canuto et al. Un accent particulier est mis sur la façon dont nous combinons la méthode spectrale à celle des éléments finis classiques. Nous destinons cette discrétisation à la description des écoulements tridimensionnels périodiques.
Dans le chapitre 3, nous utilisons les problèmes de convection-diffusion et de Poiseuille comme bancs d'essai pour valider la discrétisation EFS. Nous analysons aussi le problème de Stokes et revisitons l'étude de la stabilité des écoulements de Poiseuille. Nous utilisons dans ce chapitre la simulation numérique directe, basée sur le schéma de Simo et Armero [6], pour décrire l'écoulement post-bifurcation.
Dans le quatrième chapitre, nous combinons l'approche EFS avec la méthode des domaines fictifs présentées par Glowinski, Pan et Périaux dans [23] pour étudier un problème d'écoulement périodique dans une géométrie plus
com-plexe que celle du problème de Poiseuille. En utilisant la condensation sta-tique, nous éliminons les multiplicateurs de Lagrange ce qui conduit à un système comparable à celui résultant de la discrétisation du problème sans obstacle.
Dans le chapitre 5, au lieu de l'analyse modale, nous introduisons une ap-proche entièrement tridimensionnelle. L'hypothèse simplificatrice, sur la forme des perturbations, introduite au chapitre 1 est levée et on montre qu'on abou-tit aux mêmes conclusions que l'analyse modale. Nous revenons sur le mini-mum de la courbe de neutralité et utilisons la simulation numérique directe, basée sur un schéma de Gear en temps, pour capturer et décrire l'écoulement stationnaire tridimensionnel et périodique vers lequel l'écoulement bidimen-sionnel bifurque.
Chapitre 1
Cavité entraînée à section
carrée : une analyse modale
Dans ce chapitre, nous exposons les motivations de cette thèse dans la pers-pective d'une continuation des travaux entamés dans [29]. Notre étude de la stabilité des écoulements dans une cavité entraînée repose sur deux outils : le principe de stabilité linéaire et la simulation numérique directe couramment désignée par l'acronyme DNS. Dans ce chapitre, nous combinerons le pre-mier à une méthode connue chez les praticiens sous le nom d'analyse modale qui n'est rien d'autre qu'une réduction dimensionnelle opérée par transfor-mation de Fourier. Dans la première section, nous revenons brièvement sur la présentation qui en est faite en détail dans [30]. Dans la seconde, nous introduisons une méthode de continuation inspirée de [4] (chapitre 12 section 12.3), pour construire une courbe de neutralité plus précise et couvrir un intervalle de nombres d'ondes plus grand que celui étudié dans [29]. Dans la troisième section, nous concluons ce chapitre en faisant ressortir les
limita-s CHAPITRE 1. ANALYSE MODALE DE LA STABILITE tions de l'approche modale qui motivent le développement d'une approche entièrement tridimensionnelle que nous présenterons dans les chapitres sui-vants.
1.1 Ecoulement dans une cavité entraînée :
cadre mathématique.
L'objet de cette section est d'exposer le cadre d'application du principe de stabilité linéaire et de la théorie des systèmes dynamiques pour décrire le comportement d'un écoulement visqueux et incompressible dans une ca-vité entraînée à section carrée. Pour ce faire, introduisons d'abord le cadre mathématique général.
FlG. 1.1 - La cavité entraînée
Considérons une cavité infinie à section carrée, surmontée, comme le montre la figure 1.1, d'un mécanisme de roulement. Lorsqu'il est mis en marche, il
imprime un mouvement au fluide (incompressible et newtonien) contenu dans la cavité. On notera
u = (0,1) x (0,1), 7i = [0,1] x {1}, 72 = d u \7i ,
la section de la cavité et les deux parties de sa frontière. Ceci étant, la cavité infinie prend la forme du canal décrit par
n = w x M , Ti = 7J x M, T2 = 72 x M,
où Ti est la partie mobile de la frontière et T2 sa partie immobile.
L'écoulement du fluide à l'intérieur du domaine ainsi délimité peut être modélisé par les équations de NavierStokes. Pour distinguer les composantes transverse et longitudinale de la vitesse, nous posons
u = (iït, ui)
où la partie transverse, iït, est la projection du vecteur vitesse sur le plan Oxy et la partie longitudinale ui est la projection sur l'axe Oz.
L'écoulement étudié est alors caractérisé par la paire (u,p) (vitessepression) solution du système de NavierStokes
(1.1.1) r d u _ i ~dt ~ Re V \ / û + u ■ Vu + Vp = 0 V Û = 0 u\r i = (1,0,0) «|r2 = 0 û(x, y , z , t = 0) = u0
10 CHAPITRE 1. ANALYSE MODALE DE LA STABILITÉ Notre but est d'étudier l'évolution du comportement dynamique des solutions en fonction du paramètre Re appelé nombre de Reynolds. Nous savons que, lorsque Re est petit, la solution de 1.1.1 est stationnaire, que sa composante longitudinale est nulle et que sa composante transverse est invariante dans la direction longitudinale. Autrement dit,
u(x, y, z, t) = (Û(x, y), 0), p(x, y, z) = P ( x , y).
Notre premier but sera de déterminer la valeur du paramètre Re à partir de laquelle cette solution bidimensionnelle perdra sa stabilité dynamique, c'est-à-dire cessera d'être la solution physique.
Le théorème de Hartman-Grobman stipule que, sous des conditions appro-priées, le comportement dynamique d'une solution stationnaire, c'est-à-dire d'un point d'équilibre de 1.1.1, est correctement prédit par celui de la solution 0 du système linéarisé autour d'elle.
Suivant [29] ce système linéarisé, d'inconnu (v,pr), prend la forme suivante :
(1.1.2) dv 1 d t ~ R e V -Vv + v - V U + U - W + V p r = 0 V - v = 0 0|ri = (0,0,0) £|r2=0 v(x, y , z , t = 0) = VQ
Pour caractériser la stabilité de la solution nulle de ce système, écrivons-le sous la forme
du
— = A ( u ) , u e H,
où A est l'opérateur différentiel du problème et H l'espace approprié des solutions. En vertu du principe de linéarisation, la solution 0 sera stable si le spectre de A est entièrement dans le demi-plan gauche diz < 0 et instable si ce spectre intersecte le demi-plan droit ?Rz > 0. Tel qu'énoncé, ce principe n'est applicable que dans le cas où l'opérateur A est un "bel" opérateur comme, par exemple, un opérateur à inverse compact. Malheureusement, lorsque la cavité est infinie ça n'est pas le cas et le spectre de l'opérateur est continu. Il y a plusieurs façons de contourner cette difficulté et nous reviendrons sur ce point au chapitre suivant.
Pour le moment, nous allons nous concentrer sur une approche dite " modale " qui consiste à ne considérer comme admissibles que les perturbations qui prennent la forme d'une onde spatiale simple dont la longueur d'onde L devient un second paramètre du problème. Cette approche, présentée à la section suivante, permet de réduire à deux la dimension en espace ce qui diminue évidemment le nombre de degrés de liberté.
1.2 L'approche modale
Abouhamza, dans [1], fait une analyse détaillée de la stabilité des écoulements dans une cavité bidimensionnelle. Poursuivant les travaux de Aidun et al. dans [2] et Homsy et al. dans [25], nous faisons, dans [29], une étude plus
12 CHAPITRE 1. ANALYSE MODALE DE LA STABILITE générale en dimension trois, basée sur l'approche modale.
1.2.1 Cadre de l'approche modale
Pour réduire la dimension spatiale, nous limitons notre attention aux solu-tions de (1.1.2) de la forme suivante :
(1.2.3)
v = v{x, y, z, t) = v(x, y)ei a z~x t et pr = pr{x, y, z, t) = p(x, y)ei a z~X t.
où a est le nombre d'onde lié à la longueur d'onde L par
2TT
a =
T
et A est un nombre complexe dont la partie réelle représente la variation tem-porelle de l'amplitude alors que la partie imaginaire représente la fréquence. En d'autres termes, nous fixons la longueur d'onde des perturbations qui devient un paramètre.
Dès lors le principe de stabilité linéaire nous permet d'affirmer si le point fixe est stable sous les perturbations de nombre d'onde a. En faisant varier a sur un intervalle assez grand, nous pourrons étudier l'effet des perturbations de longueur d'onde de plus en plus courte.
Une perturbation du type (1.2.3) est connue sous le nom de perturbation de Tollmien-Schlichting (type TS) et ce type d'ondes apparaît partout dans l'analyse de la transition des écoulements laminaires. Posons
En reportant ces expressions dans (1.1.2), nous obtenons une famille de problèmes spectraux qui dépend des paramètres a et Re.
(1.2.4)
dv\ TJ dvi dUi dUi dp
dx dy dx dy dx dv2 dv2 dU2 dU2 dp dx dy dx dy dy
®0!l
+u
d i v 3 dx dyA(A«i-a
2"i) + 0
^(At;2-a2t;2) + ( C / i ^ + « 72^ ) + ( t ; i ^ + t ;2^ ) - r - ^ = Xv2 - - ^ ( / \ i v3- a h v3) + ( U i - ^: r- r U2- ^: r) - a p = \iv3 dvi dv2 ——h ——h iav3 = 0 dans s 2 dx dy v — 0 sur dfl Pour a fixé, le domaine de définition de l'opérateur différentiel est un ouvertborné et le principe de stabilité linéaire permet de conclure que la solution (U, P) est stable si toutes les valeurs propres de ce système ont une par-tie réelle strictement positive et instable si l'une d'elles est à parpar-tie réelle strictement négative.1
L'idée de base de l'approche modale est qu'une perturbation tridimension-nelle suffisamment régulière peut être vue comme une superposition d'ondes de type TS ce qui est partiellement justifié dans [29] en utilisant l'analyse de Fourier. On est ainsi ramené à étudier, pour un nombre d'onde donné, la stabilité de la solution bidimensionnelle lorsqu'on augmente graduelle-ment le paramètre de bifurcation Re. La première valeur de Re pour laquelle la solution perd sa stabilité est appelée nombre de Reynolds critique pour le nombre d'onde a et noté Rec(a) et la courbe a i-* Rec(a) est appelée
1Le changement de rôle des demi-plans gauche et droit du plan complexe est du au fait
14 CHAPITRE 1. ANALYSE MODALE DE LA STABILITE courbe de neutralité. L'abscisse du point de minimum sur cette courbe donne le nombre d'onde et donc la longueur d'onde, du mode qui déstabilise l'écoulement bidimensionnel pour la plus petite valeur de Re.
Il convient de noter que, si pour un nombre d'onde Q, (vi,v2,iv3) est un vecteur propre associé à la valeur propre À, alors (vi, v2, —iv3) est un vecteur propre associé à la même valeur propre pour le nombre d'onde — a. Donc les spectres associés à a et —a donnés par le système 1.2.4 sont identiques. Cette remarque aura un impact sur la discrétisation du problème lorsque que nous considérerons une approche tridimensionnelle dans le chapitre 5. Dans la présente section elle permet de restreindre notre analyse modale aux nombres d'onde positifs.
Dans [29] nous avons limité notre analyse à l'intervalle [0,11]. Dans la section suivante, en plus de présenter une méthode de continuation pour le tracé de la courbe de neutralité, nous allons au delà de a = 20.
1.2.2 Méthode de continuation et courbe de neutralité
Le problème spectral 1.2.4 dépend de deux paramètres, le nombre d'onde a et le nombre de Reynolds Re. Pour étudier l'évolution du spectre en fonction de Re, nous introduisons une discrétisation par éléments finis du problème d'EDP. Cette discrétisation est décrite en détail dans [29]. Dans cette thèse nous discuterons en détail de la construction d'une telle discrétisation pour un code tridimensionnel. Pour le moment, nous nous limitons à une description sommaire. Pour un maillage donné, nous approximons les trois composantes de la vitesse, par des fonctions continues et polynomiales par morceaux de
degré 2 alors que la pression est approximée par la somme d'une fonction continue et polynomiale par morceaux de degré 1 et d'une fonction constante par élément. L'intérêt de cette discrétisation a été longuement discuté dans [20]. A partir de maintenant, nous ne distinguerons plus les solutions de 1.2.4 de leur approximation par éléments finis.
Nous noterons a(a, Re), l'ensemble des 500 valeurs propres les plus proches de l'origine et par
(1.2.5) s\min(a,Re) = argmin K{n) H€<7(a,Re)
la valeur propre ayant la plus petite partie réelle, où TZ(u) est la partie réelle de /x. Pour un a donné, le nombre de Reynolds critique, noté Rc est défini par :
(1.2.6) Rc(a) = inf{Re > 0|Amin(ûifle) < 0},
La courbe de neutralité est l'ensemble de points (a, Rc(a)) lorsque a > 0. Classiquement, une telle courbe est obtenue comme suit :
1. On fixe un nombre d'onde a.
2. On détermine une solution stationnaire de Navier-Stokes à un Reynolds faible.
3. On calcule Amin(a>ite)
4. Si Xjnin'a^Re) > 0, nous accroissons le nombre de Reynolds et nous retournons à l'étape 2.
5. Si Xmin(a,Re) < 0, nous diminuons le nombre de Reynolds et retournons à l'étape 2.
16 CHAPITRE 1. ANALYSE MODALE DE LA STABILITÉ 6. Le Reynolds critique correspond à la valeur du nombre de Reynolds
pour laquelle \min(Q,Re) = 0.
Le nombre d'onde fixé est généralement un entier et on utilise une interpola-tion linéaire pour obtenir une courbe. Dans [29], nous utilisons cette approche pour construire la courbe de neutralité entre a = 0 e t a = l l .
Ici, nous introduisons une méthode numérique inspirée de celle décrite au cha-pitre 12 de [4] pour tracer cette courbe. L'idée est de construire un maillage triangulaire du plan (a, Re) en écrivant le premier quadrant comme une réunion de rectangles de la forme
[a, a + 1] x [Re, Re + A Re],
et en divisant chacun de ces rectangles en deux triangles séparés par la dia-gonale
[(a, Re), (a + 1 , Re + ARe)].
Selon [1], Pc(0) G [8000,8050]. Considérons le triangle rectangle dont les sommets sont les points (0,8000), (0,8050) et (1,8050) (voir 1.2). Nous sa-vons que la courbe pénètre ce triangle en un point (le Door-In) de l'arête
[(0,8000), (0, 8050)] dont on peut obtenir une approximation par interpola-tion linéaire inverse : puisque
/ l = Amin(0,8000) = 0.00147822 / 2 = Xmin (0,8050) = -0.00009579 nous résolvons
0 = *2 Jl{ R e - 8000) + / l => Pe = , * + 8000 = 8046.9
50 /i - f2
En calculant a( 1,8050) nous déterminons que Amin( 1,8050) < 0 et donc que la courbe ressort du triangle en un point (le Door-Out) de l'arête [(0,8000), (1,8050)] que l'on détermine à nouveau par interpolation inverse. Evidemment le " Door-Out " du premier triangle est aussi le " Door-In " du triangle voisin dont les sommets sont (0,8000), (1,8000) et (1,8050). En calculant <x(l,8000) nous pouvons déterminer si le " Door-Out " est sur l'arête horizontale ou bien sur l'arête verticale. Ici il est sur l'arête verticale. On continue ainsi de proche en proche, chaque nouveau triangle étant le triangle rectangle du maillage qui partage l'arête " Door-Out " de son prédécesseur. Les premiers résultats détaillés sont illustrés sur les figures (1.2), (1.3) et (1.4) alors que les valeurs numériques sont résumées dans le tableau (1.1).
905 / -BC4 80 35
m
0 / : 903 80 25 902 8015 B s 801 -90 05 -0 -02 -0.4 -0 6 -0 8 1 12 14 16 18 2 FlG. 1.2 - Le triangle de sommets (0,8000), (0,8050), et (1,8050). Sur la figure (1.5), on constate que la courbe de neutralité décroît de façon abrupte entre a = 1 et a = 2, ce que nous observions déjà dans [29]. En fait,1> CHAPITRE 1. ANALYSE MODALE DE LA STABILITE ■ ■ i ■ 1 ) 90 45 / ' 8 0 4
a
/ ■ 90 35 a 9 0 3 80 25 8 0 2s
/ 8 0 1 5 90 1 A . 80 05 9 0 5 9 0 5 80 49 / ■ 80 48 8047 • 90 46 8045 /LU «0 44 0 0 2 0.4 0 6 0 8 1 12 1.4 16 18 2 0 0 2 0 4 0.6 0.8 1 FlG. 1.3 Le triangle de sommets (0,8000), (1,8050) et (1,8000).TAB. 1.1 À gauche : a et Re sont fixés puis on calcule \min(a,Re) correspon dant. À droite : a et Re sont interpolés.
Re a A m i n ( a , R e ) a Re 8000 0 0.0014845 0 8046.9 8050 0 -0.00009579 0.9875 8049.4 8050 1 -0.00001877 1.0 8046.6 8000 1 0.00025824 1.0132 8000.7 8050 2 -0.0193 1.0133 8000 8000 2 -0.0191
80 45 / 804 / ■ 80 35 a Ll / ■ 803 / 90 25 / 802 a -80 15 a 801 -toos / / -80 45 804 90 35 a 803 80 25 802 LU -8015 -8 0 ' -90 05 _ _ ^ - ^ ^ 0 0 2 0 4 0 6 0 8 1 2 14 1 6 18 2 OS O K 105 11 FlG. 1.4 - Le triangle de sommets (1,8050), (1,8000) et (2,8050). cela prendrait (8000 — 4750)/50 = 65 étapes pour trouver le Reynolds critique correspondant à a = 2. Pour accélérer le procédé, on pourrait approximer le point par lequel passe la courbe k a = 2 par bissection.
1 ■ 1 S0 45 -904 / ■ 90 35 Q H / " 903 / 90 25 ' 802 90 '5 LU -80 1 E 90 05 80 ' 90 09 ■ 90 06 LU 80 04 LU ; 80 02 \ 80 Ta" 80 0 0 2 0 4 0 6 0 8 1 12 14 1 6 1.8 2 0.99 0995 1 1 005 1.01 1 015 FlG. 1.5 - Le triangle de sommets (1,8000), (2,8000) et (2,8050) La figure 1.6 donne l'allure de la courbe obtenue jusqu'à la valeur a = 20, alors qu'on trouve les valeurs numériques des coordonnées des points dans le tableau 1.2, pour des valeurs entière de a G [0, 20].
20 CHAPITRE 1. ANALYSE MODALE DE LA STABILITE 9000 8000 7000- 6000-5000 4000 3000- 2000-1000 10 15 20
TA B. 1.2 - Les points sur la courbe de neutralité pour les a entiers o
Re
c rM
Q «*H.(«0 a Rec r l l(a) a Rec r l t(*) 0 8045 6 1032 12 925 18 811.92 1 8046.6 7 932.5 13 837.69 19 832.58 2 4772.68 8 939 14 799.3 20 856 3 4769.25 9 1029.8 15 786 4 1967.9 10 1132 16 786 5 1261.7 11 1040 17 795.74Puisque nous avons procédé par discrétisation, il faut s'interroger sur l'in-fluence du maillage par éléments finis sur la précision des calculs de spectre. Tous les résultats présentés ici ont été obtenus avec un maillage de 4096 éléments. Si nous raffinons le maillage en passant à 6400 puis 8100 éléments la variation des valeurs propres est très faible et celle de la partie imaginaire de la valeur propre critique est encore plus faible. Nous pouvons donc affirmer que les valeurs de Rc sont correctement approximées et que les fréquences critiques le sont également.
Par ailleurs, pour les valeurs de a entre 0 et 11, les valeurs propres critiques sont imaginaires pures et par conséquent les écoulements obtenus après ces bifurcations, qui sont dites de Hopf, sont périodiques en temps. Dans [29], nous faisons une analyse détaillée des spectres correspondants à ces valeurs de a. Pour les valeurs de a plus grande que 11, les valeurs propres critiques sont toutes réelles, on obtient donc un écoulement stationnaire après la bi-furcation. Nous résumons ces résultats en quatre points :
22 CHAPITRE 1. ANALYSE MODALE DE LA STABILITE le Reynolds critique est : Rc(a) = 8045.
2. Le point (7, 932.5) est un minimun local de La courbe de neutralité. 3. La première perte de stabilité, lorsqu'on part d'une solution
bidimen-sionnelle stable à bas Reynolds et que l'on augmente graduellement le Reynolds, est provoquée par le mode correspondant à un nombre d'onde voisin de a = 15 et Re = 786.
4. Il existe un nombre d'onde à légèrement plus grand que 11 et tel que pour Q < à, la solution post-bifurcation est périodique en temps, alors que pour a > à elle est stationnaire.
Quelques points de la courbe 1.6 méritent une analyse plus détaillée, notam-ment le minimum global autour de a = 15 sur lequel nous nous concentrons à la section 1.3.
1.3 Minimum autour de a = 15 et DNS
La courbe de neutralité présentée à la figure 1.6 montre un minimum au-tour de a = 15. Dans cette section, nous précisons ce mode ainsi que la nature de la bifurcation qu'il produit. Nous donnons aussi une description de la direction privilégiée que prend la solution après la perte de stabilité. Enfin, nous revenons sur la simulation numérique directe (DNS) pour suivre l'écoulement post-bifurcation. Nous verrons que cela n'est pas possible dans le cadre bidimensionnel actuel ce qui constitue d'ailleurs la motivation des chapitres suivants.
1.3.1 Description du minimum autour de a = 15
La courbe de neutralité construite à la section 1.2.2 suggère que la fonction objective Rc(ct) atteint son minimum global autour de a = 15 et non au voisinage de a = 7 comme suggéré par Ding et Kawahara dans [14]. Le point critique autour de Q = 7 est plutôt un minimum local, précisément atteint à a = 7.5 pour un Reynolds critique de iîc(7.5) = 925, une valeur proche de celle obtenue dans [14]. À ce minimum local correspond une bifurcation de Hopf qui conduit à un écoulement périodique en temps.
24 CHAPITRE 1. ANALYSE MODALE DE LA STABILITE La figure 1.7 présente en bleu la portion de la courbe composée de points cri tiques qui produisent une bifurcation de Hopf et en rouge ceux qui produisent une bifurcation stationnaire.
Globalement, la première perte de stabilité se produit à Reynolds 784.8 et correspond précisément à a = 15.5. La figure 1.8 montre le spectre correspon dant à ce point critique. Il est clair que la première valeur propre qui traverse l'axe est réelle. On sait, en vertu de la théorie des systèmes dynamiques, que,
10 8 6 4 2 0 2 4 6 8 10 2
\*1 ********
****** * \ % * * * * * * * * * % * * * * * * * * * * * * * * * * * * * * * * * . A * * * *_ * \ * * * * # * ** * * * * ^ * ^ ' * * k . * % ** * * " * * **** * * * ê *
* * * * * * * % * ' ■ * * * * * * ** * * * * ** ** * * * * * * * * * * * * * * * 10FlG. 1.8 Les 500 valeurs propres les plus proches de l'axe imaginaire à Q = 15.5 et Re = 784.8
dans notre cas, génériquement la solution bifurque vers un écoulement sta-tionnaire voisin en suivant la direction donnée par le vecteur propre associé à la valeur propre critique. Le mode responsable de cette perte de stabilité, a = 15.5, est le mode dominant de ce nouvel écoulement périodique suivant la direction longitudinale. La figure 1.9 montre les trois composantes de ce vecteur directeur. On peut observer qu'au centre de la cavité la valeur de chacune des composantes est sensiblement nulle, les amplitudes les plus im-portantes sont observées dans les coins, notamment aux coins supérieur et inférieur gauche. L'information la plus importante de cette figure est que ce vecteur directeur possède une composante longitudinale non-nulle. Donc il y a tout lieu de croire que l'écoulement stationnaire voisin est tridimensionnel. La figure 1.10 montre quelques coupes (suivant la direction transversale) d'une reconstruction de l'écoulement juste après la bifurcation. Elle est obte-nue en additionnant à la vitesse du point fixe (U, P) un multiple du vecteur directeur décrit par la figure 1.9. On peut voir l'importance des effets de coins dans la structure de l'écoulement résultant de la perturbation.
La figure 1.11, montre une coupe longitudinale de l'écoulement en x = 0.5. À Reynolds 785, seul le mode correspondant à a = 15.5 est à l'origine de l'in-stabilité de l'écoulement. En d'autres termes, tous les autres modes tendent vers zéro avec le temps et l'écoulement est très voisin de l'écoulement obtenu comme une somme de l'écoulement bidimensionnelle de base et un multiple du vecteur propre critique correspondant à a = 15.5. La figure 1.10 nous montre que l'écoulement résultant est tridimensionnel et périodique dans la direction longitudinale. On peut donner une description de cet écoulement en intégrant par rapport au temps le système instationnaire 1.1.1, partant
26 CHAPITRE 1. ANALYSE MODALE DE LA STABILITÉ
: & ■ - ? ■ ' ■ - - : . - ■ ■ - ^
-. .- ,. "■■-.-. ■-'-. "vyv
04 M 08
FlG. 1.11 Reconstruction de l'écoulement 3D à a = 15.5 et Re = 784.8 de la solution reconstituée, jusqu'à ce que l'on atteigne le régime permanent. Nous posons plus clairement ce problème dans la section suivante.
1.3.2 Simulation numérique directe
Nous avons montré, à l'aide de l'analyse modale, qu'en suivant une branche de solutions bidimensionnelles stables et stationnaires du système dynamique 1.1.1 que la première perte de stabilité se produisait à Reynolds 785. Elle est causée par le mode correspondant à a = 15.5. L'écoulement bidimensionnel bifurque alors vers un écoulement tridimensionnel stable voisin. L'écoulement bidimensionel à Re = 785 est U et le vecteur propre correspondant au mode à l'origine de la perte de stabilité est v. Nous posons dans le système 1.1.1 :
28 CHAPITRE 1. ANALYSE MODALE DE LA STABILITÉ Nous faisons ensuite de la simulation numérique directe, en intégrant suf-fisamment en temps le système ainsi obtenu. Ceci nécessite un maillage entièrement tridimensionnel d'un domaine suffisamment long pour contenir au moins une période de l'écoulement post-bifurcation.
L'un des obstacles auquel on se bute lorsqu'on utilise les méthodes tra-ditionnelles de discrétisation, comme la méthode des éléments finis clas-siques, pour résoudre 1.1.1 par simulation directe est la très grande taille des systèmes discrets obtenus. En effet, pour une discrétisation adéquate, le nombre de degrés de liberté nécessaire est très élevé, ce qui impose l'usage de méthodes itératives mal adaptées à notre situation. D'où la nécessité d'in-troduire des schémas de discrétisation conduisant à des systèmes discrets de taille moindre. Dans notre cas, on peut atteindre cet objectif en exploitant la forme particulière des conditions aux bords, notamment la périodicité de la solution que nous voulons capturer suivant la direction longitudinale. Plu-sieurs discrétisations basées sur les méthodes spectrales ont été proposées dans ce sens.
Dans [3] Albensoeder et al. utilisent une méthode de collocation basée sur les polynômes de Chebyshev pour la discrétisation spatiale et un schéma d'ordre deux pour la discrétisation en temps. L'approche globale des méthodes spec-trales, comme la méthode de collocation par des polynômes de Chebyshev, nécessite un traitement particulier des singularités locales que l'on peut ob-server dans les coins de la cavité pour une solution bidimensionnelle du système stationnaire associé à 1.1.1. Ces techniques sont exposées dans [7], elles conduisent à une meilleure approximation de la solution stationnaire, mais leur effet dans le cadre d'une étude de stabilité est moins documenté.
Les schémas de discrétisation combinant la méthode des éléments finis pour la section de la cavité aux méthodes spectrales dans la direction longitudi-nale, direction dans laquelle la solution est plus régulière offrent donc un meilleur compromis lorsque l'objectif final est l'étude de la stabilité linéaire des solutions ainsi approximées.
Dans [12], Canuto et al. présentent une méthode de discrétisation combi-nant le développement en série de Fourier dans la direction de périodicité et une méthode d'éléments finis standard dans les deux autres directions. L'approche locale des méthodes par éléments finis permet de capturer, sans ajout d'autre technicalité, les singularités des champs de vitesse et de pres-sion dans les coins de la cavité. Cette approche permet aussi de travailler avec des sections de forme plus complexe. Par contre l'implémentation numérique de ce schéma en dimension trois est très coûteuse en espace mémoire, le développement en série de Fourier conduisant à une matrice et à un membre de droite complexe. En plus de doubler la mémoire requise, cela augmente aussi largement le nombre d'opérations à effectuer pour résoudre le système matriciel. Ceci devient problématique lorsqu'on considère des maillages assez fins.
Dans les chapitres 2, 3 et 4, nous présentons un schéma de discrétisation qui s'inspire de celui de Canuto et al. mais avec l'avantage de pouvoir travailler en arithmétique réelle. Nous l'utilisons ensuite dans le chapitre 5 pour décrire l'écoulement post-bifuraction à Re = 785.
Chapitre 2
Eléments finis spectraux
Dans ce chapitre, nous introduisons une méthode d'éléments finis spectraux (EFS) que nous destinons à la discrétisation spatiale de problèmes physiques dont la solution satisfait à une condition de périodicité dans une direction. Nous nous limitons ici à la construction des espaces fonctionnels et à leur discrétisation. La mise en oeuvre de la méthode développée dans ce chapitre sera le propos du chapitre 3. Comme au chapitre 1, ces problèmes sont définis de façon générale sur des geometries de la forme :
où LU C Md avec d G {1,2}. Un ouvert de ce type sera appelé cylindre et le but de cette thèse est de proposer une approche pour l'étude de la transition des écoulements de fluides fluides incompressibles dans de tels cylindres. Si la période physique de l'écoulement est L, nous ferons le changement de variable suivant :
x <— ax, 31
32 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX avec a = ^— pour nous ramener à un écoulement de période 2/T. Nous posons ensuite Ip = [0,27r). Une portion d'un tel cylindre de la forme u x Ip sera notée Çlp.
Dans la première section, nous énonçons les formulations variationnelles des problèmes de convection-diffusion et de Poiseuille, définis dans ce cadre. Dans la seconde section, nous revisitons toute la problématique d'une méthode d'éléments finis sans pour autant revenir sur les détails de l'analyse fonc-tionnelle sous jacente que nous supposons connus, notamment les notions de distribution et d'espace de Sobolev. L'accent est plutôt mis sur la méthode spectrale utilisée et sur la façon dont nous la combinons aux éléments finis classiques pour obtenir une approximation conforme des espaces de fonctions périodiques. L'objectif numérique visé est de profiter à la fois de la robustesse de la méthode des éléments finis et de la précision de la méthode spectrale dans la direction de périodicité. Nous concluons ce chapitre en combinant les la méthode EFS avec un schéma d'intégration en temps des équations de Navier-Stokes bidimensionnelles.
2.1 Formulations variationnelles de problèmes
présentant une direction de périodicité
A travers deux exemples, nous illustrons comment, pour l'étude d'un problème physique présentant une direction de périodicité, il est possible de choisir un cadre fonctionnel et une formulation variationnelle pour lesquels on peut démontrer l'existence et l'unicité d'une solution.Sobo-lev des fonctions dont les dérivées au sens des distributions jusqu'à l'ordre k sont dans L2(Q). Si To C dQ, est une partie de la frontière de Çl de me sure non nulle, nous noterons Hko(Q) l'espace des fonctions de Hk(Çl) dont la restriction à To, convenablement définie à l'aide d'un opérateur de trace, est nulle. Nous noterons Hk(Çl) les fonctions de Hk(Q.) qui, ainsi que leurs dérivées jusqu'à l'ordre k, sont périodiques de période 2 7r dans la d + le m e direction.
2.1.1 Problème de convectiondiffusion
Comme premier exemple, nous examinons un problème de convectiondiffusion. Nous posons
w = (0,l)
et considérons l'axe Ox comme la direction de périodicité. Etant donné un champ de vecteurs b G (Hp(Q) D L°°(f2))2, incompressible (i.e. V ■ b = 0), une fonction &o G ^°°(^p) telle que bo > (3 > 0 dans Qp, et une fonction / G L2(QP). On considère le problème suivant : trouver u(x, y) définie dans Q telle que : (2.1.1) A u rbVu + bou = / u(x,0) = u(x,l) = 0, VXG(0,2TT) u(0,y) = u(2n,y), Vy e (0,1)
| ( 0 , | r ) = ! < * , „ ) . Vy€(0,l)
34 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX Pour T0 = M x {0,1}, on note V = /#0( î î ) et Vp = V n flj(ft). Selon Temam ([32]) on peut montrer que Vp est l'adhérence dans H1^ ) de l'espace
vp = {v | v\ap G 2>(fîp) e t v(x + 27r> y) = v(x,y). Vy e w}, des fonctions C00 à support compact, périodiques dans la direction x. Nous avons maintenant le cadre fonctionnel approprié pour obtenir le résultat suivant.
T H É O R È M E 2.1.1. Étant donnés b, bo et f ayant les propriétés énoncées ci
haut, le problème variationnel : trouver u £ Vp tel que
/ Vu ■ Vv dxdy + / (b ■ Vu)v dxdy + / b0uv dxdy
(O 1 0} P «/ftp J Qp
= I fv dxdy Vv G Vp. Jnp
possède une solution unique qui est aussi une solution du problème (2.1.1). Inversement, toute solution de (2.1.1) est une solution de (2.1.2).
D É M O N S T R A T I O N :
Supposons que (2.1.1) possède une solution classique. Cette solution sera dans Vp et donc, si nous multiplions les deux membres de l'EDP par une fonction de Vp et que nous intégrons par parties, nous voyons que (2.1.2) est satisfait pour toute fonction test dans Vp. Le résultat découle alors du résultat de densité évoqué plus haut.
Réciproquement, si le problème variationnel (2.1.2) possède une solution u G Vp l'équation aux dérivées partielles du problème (2.1.1) est satisfaite au sens des distributions et, sous les conditions imposées, cette solution est une
solution classique. Il ne reste qu'à vérifier la condition aux limites sur la dérivée par rapport à x. Pour ce faire, multiplions les deux membres de l'EDP par une fonction de Vp et intégrons par parties. Nous obtenons
/ Vu • Vv dxdy + j (b • Vw)w dxdy + / b0uv dxdy
J QP JUp Jïlp
+ I V u ( — i ) v d y + / V u l v d y = J fv dxdy Vu G Vf
J{o}x[o,i] J{2ir}x[o,i] Jnp
Puisque u est une solution de (2.1.2), toutes les intégrales sur Vl se simplifient entre elles et, en vertu de la périodicité de v il ne reste que la condition,
jU|p''»>-s<
M
)
,,<M
*-
a
La seconde condition aux limites en découle puisque, en vertu du théorème de trace, l'espace des v(0, y) est dense dans L2([0,1]).
Pour considérer finalement la question de l'existence et l'unicité de la solution du problème variationnel, nous posons
a(u, v) = Vu • Vf dxdy + / (b ■ Vu)v dxdy + / b0uv dxdy Jo. Jn Jn a(.,.) est évidemment une forme bilinéaire sur Vp x Vp. En utilisant entre autre l'inégalité de Holder et le lemme de densité, on montre que :
| o ( « , t ; ) | < | u |i| v |i + || b Hool « |i| v |o + || 6o llool w |o| v |0
< C \\ u M v \u
36 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX Par ailleurs, puisque b est périodique en y,
/ (b ■ Vu)v dxdy = — uV • (vb) dxdy Jn Jn
= — (b ■ S7v + u V ■ b)u dxdy Jn
= — I (b Vv)u dxdy Jn
Cette dernière égalité montre que a(.,.) n'est pas symétrique et, mieux encore, elle nous permet de dire que pour v = u, on a :
/ (b ■ Vu)u dxdy = 0.
Jn
On en déduit que
| a(u,u) | = / | Vu |2 dxdy + / b0 \ u |2 dxdy Jn Jn ■ > / | Vu |2 dxdy + (3 \ u |2 dxdy
Jn Jn
> C\\u\\l
D'où a(.,.) est une forme bilinéaire continue et coercive. En vertu du Lemme de LaxMilgram on conclut que le problème (2.1.2) possède une unique so lution.
2.1.2 Problème de Poiseuille
Pour nous rapprocher de notre objectif, nous considérons comme second exemple, le problème d'un écoulement périodique dans la direction Ox et incompressible qui prend place entre deux plaques parallèles de longueur et largeur infinies.
FlG. 2.1 - Écoulement de Poiseuille.
En faisant l'hypothèse raisonnable de l'invariance de la solution par rapport à z, on pose :
a; = (-1,1).
Sans perte de généralité, nous supposons encore que la période est 27T. No-tons :
r i = R x {-1,1} r0 = Tj n up
r
e= {o}x[-i,i]
rs = {27T}x[-l,l].
En l'absence de force externe, un écoulement dans une telle géométrie est déterminé par le flux entrant noté ici Q. A basse vitesse, cet écoulement peut être modélisé par le système suivant.
3b CHAPITRE 2. ELEMENTS FINIS SPECTRAUX (2.1.3) - A u + Vp = 0 V u = 0
I
s
< J r .s\
= 0 T i u\ = ul re ra d U y f9u*| d x red x \
1 • fids = Qoù n est la normale intérieure sur l'entrée, c'est-à-dire , dans notre géométrie, n = (1,0). Ici l'espace fonctionnel est
VP = {ve(HliSï)f I vTo = 0}.
Tout comme dans le cas du problème de convection-diffusion, la condition sur les dérivées normales de û dans la direction de périodicité est une condi-tion naturelle. Pour la condicondi-tion de flux, les choses sont moins évidentes. Cependant, en considérant les écoulements de Poiseuille
û = a ( l - y2, 0 ) , p = - 2 a x + C,
on voit tout de suite que, sans cette condition, la solution ne saurait être unique. Nous allons montrer que, si l'on veut donner une formulation varia-tionnelle correcte du problème fort (2.1.3) il faut le modifier légèrement en introduisant un opérateur de saut au bord.
On trouve une analyse détaillée de cette question dans le travail de Am-rouche et coll. ([5]). L'approche qu'ils ont retenue est une généralisation de la présentation classique de Girault-Raviart ([22]) mais requiert l'utilisation d'espaces de traces un peu plus complexes que H 2 (T0). Sans aller dans ces détails, nous allons montrer comment établir le lien entre la formulation (2.1.3) et celle qu'ils ont étudiée.
Pour ce faire, introduisons deux convexes fermés.
Vo = { v e Vp\ V - v = 0}, Kp = { v e V p \ f v - n d y = Q.}. Jre
Pour Q fixé, on vérifiera que
uQ = ^ g ( i - u2, o )
est un élément de V0 n Kp qui est donc non-vide. En vertu de l'inégalité de Poincaré, l'inéquation variationnelle,
(2.1.4) f Vu : V(u - u) dxdy > 0 W £ V0 n Kp. Jnp
possède donc une solution unique. Notons A : Vp -> V/ l'opérateur associé à la forme bilinéaire
a(u, v) = Vu : Vt; dxdy, Jnp
et B : Vo —► K l'opérateur frontière1
xPour montrer que cet opérateur est bien défini, il faut considérer l'espace de trace
40 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX
B{v)
= [ v
Jr,
• nds.Si f5o représente la fonction indicatrice du convexe {0}, nous pouvons écrire la solution u de l'inéquation ci-haut comme le point de minimum du problème
inf -a( v , v ) - r ô0( B ( v ) - Q ) .
VOMAp Z
Nous sommes maintenant dans le cadre classique de la dualité de Fenchel, ce qui permet d'affirmer l'existence d'un A G E tel que
^(u) + B'A = 0 (2.1.5)
Bu = Q
En retournant à la forme variationnelle, nous avons ainsi remplacé l'inéquation (2.1.4) par le problème mixte : trouver (u, A) G V0 x R tels que
(2.1.6)
/ Vu : W dxdy + X v - i d y = 0 W G V0,
Jnv J - i
i:
/•iu • idy = Q.
(2.1.6) est précisément le problème étudié par Amrouche et coll. Supposant A connu, ils démontrent, en utilisant l'approche de Girault-Raviart, l'existence d'une pression p G L2(fip), pour laquelle la première équation de (2.1.3) est satisfaite. Ils en déduisent ensuite la condition naturelle sur la dérivée normale de u et surtout le lien entre le multiplicateur et la pression, lien donné par :
qui est le gradient de pression nécessaire pour imposer le débit Q.
Sans entrer dans les détails, examinons brièvement comment on obtient ces deux conditions. Si u et p sont solutions de l'équation variationnelle
/ Vu : V vdxdy — I p V • vdxdy + A / û*(0, y) ■ ndy = 0 Vu G Vp,
Jnp Jnp J i
nous pouvons intégrer par parties en tenant compte des conditions aux limites et obtenir
/ (—Au + Vp) • vdxdy + / (Vu • n + pn) ■ vda = — A / v(0,y) ■ ndy.
Jnp Jreurs J i
La forme forte de l'équation de Stokes est obtenue directement et on reste, en tenant compte de la périodicité, avec l'équation variationnelle à la frontière
/
l / o —» r\ —* \ « 1
f (^(2Tr,y) ^ ( 0 , y ) ) +(p(2n,y) p(0,y)) î)v(0, y) dy = A J v(0,y)ndy. Le choix d'une fonction test de la forme v = (0,v), conduit à la condition
du
naturelle sur ——. La relation (2.1.7) découle finalement du choix v = (u,0), dx
à la condition bien sûr de s'assurer du sens à donner à chacune des traces impliquées.
Nous donnons maintenant une forme un peu plus précise à ce résultat qui justifiera les discrétisations que nous voulons utiliser.
T H É O R È M E 2.1.2. Soit (u,p) la solution de (2.1.3). Notons p le prolongement
périodique de p sur la droite, c'estàdire p(x,y) ,xG[0,27r) p{x,y) = \
42 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX On a x p ( x , y ) = p ( x , y ) - r \ — V(x,u)Gft 2TTJ et
Vp = Vp + \s
0Ici, la notation [ ] désigne la partie entière et ÔQ = (ôo, 0) est un vecteur dont la deuxième composante est nulle alors que SQ(X, y) est pour chaque y la somme des masses de Dirac aux points x = 2 k -K, k G Z. Une telle distribution est connue sous le nom de peigne de Dirac.
DÉMONSTRATION:
La première égalité provient de la définition de p. Quant à la deuxième égalité, elle découle de la propriété de dérivation des distributions régulières suivante : Soit f(x) une fonction continue et derivable sauf aux points Xj, i = 1,2, ...n où elle possède des discontinuités de première espèce. La dérivée au sens des distributions de f(x) s'écrit :
n i=\
où s{ est le saut de la fonction f(x) en x = Xi qui est défini par :
Ceci étant, notre formulation variationnelle s'écrit, (2.1.8) ^ d u i d w x , , f1 f2\ , dW l ( , r1 r2n dm dwx j j f1 f"2
a
/ -d-à
dxdy+
/
J-iJo o x o x J-lJO / : dy dy - dxdy — a / p-7—^ dxdy +A / W l(0,y)dy = 0 1 /•27TJ-\ Jo
dut dw2 dx dx dxdy + J - i Jo * dut dw2 dy dy dxdyJ-\ Jo
r2* ,dw p—— dxdy = 0 dy f f ~d U l r! rl a f f ^ rl rl O a / q — dxdy + / / q — dxdy = 0 J - i J o dx J - i J o dyfliUi(°,y)
dy= Q
alors que la forme forte équivalente s'écrit plutôt : trouver ((u(,ut),p,A) G Vp x Ll x tels que : (2.1.9) 2 d2ui i â2ui s t dp
~
( aw
+ 2d2ut d2ut^ dp ( a 7Tr7 -dx2 du, dx*r A S dy2 dy dui dut a dx du dx dy 0 0 0L
= 0 Te u - n d s = Q44 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX Dans la prochaine section, nous introduisons une méthode d'éléments finis pour la discrétisation des espaces Vp et L2P.
2.2 Méthode des éléments finis spectraux
L'objet de cette section est de présenter une méthode de discrétisation des espaces fonctionnels utilisés dans la formulation variationnelle des problèmes présentés à la section 2.1. Nous commençons par un bref rappel de l'interpo-lation de Fourier et de la façon dont on peut la combiner à la méthode des éléments finis pour la discrétisation des problèmes présentant une direction de périodicité. A priori ceci nous force à considérer des solutions à valeurs complexes, ce qui ne change pas grand chose à la présentation précédente. Ceci étant, après ce bref rappel, nous nous affranchirons de l'interpolation complexe intrinsèque à l'analyse de Fourier en introduisant une modification des fonctions de base utilisées généralement. Ceci fait, nous présenterons les familles d'éléments finis ainsi construites et présenterons quelques résultats d'approximation.2.2.1 Interpolation trigonométrique, le cas complexe
Nous supposons, dans cette section, que les fonctions sont à valeurs com-plexes. Pour chaque u G L2([0, 2ir)), on définit les coefficients de Fourier par :
1 /*27r
(2.2.10) ûk = — u(x)e~lkxdx fc£Z.
27r7o
+00 ikx
u
i
x) = 5^
ûke—00
Soit n un entier positif, on note
P
nu(x) = Y,û
ke
ikx,
- nla somme partielle de rang n de la série de Fourier de u. On vérifie sans peine que l'ensemble
{ ei k x\ - n < k < n } ,
est orthogonal pour le produit scalaire,
r-2-ïï
< u, v > = I u(x)v(x)dx. Jo
Il en découle que Pnu est la projection orthogonale de u sur le sous-espace vectoriel de dimension 2n + 1 de L2 défini par
5„ = v e c t { ei f c l| - n < k < n}.
Nous voudrions maintenant considérer le problème de l'interpolation dans Sn. On note que, pour tout n, un élément de Sn est déterminé par 2n + 1 coefficients et donc le problème d'interpolation n'est a priori bien posé que pour 2n + 1 données. Pour N = 2n + 1 donné et
2iri
AN = {Xj = 1 ^ , j = 0 , . . . , N - l , } ,
on appelle k-ième coefficient de Fourier discret de u le nombre complexe suivant :
46 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX
1 N _ 1
(2.2.11) ûfe = — Y2u(Xj)e~tkx* - n < k < n . j = 0
On constate que les coefficients de Fourier discrets sont obtenus en approxi-mant l'intégrale 2.2.10, définissant ûfc, par la méthode du trapèze. L'algo-rithme de transformée de Fourier rapide (FFT) permet de calculer ces coef-ficients avec beaucoup d'efficacité.
Evidemment, les définitions de AJV et ûfc restent valables lorsque N(= 2n) est un nombre pair mais, pour que le problème d'interpolation reste bien posé, il faut modifier la définition de Sn pour que l'espace soit de dimension 2n. L'approche la plus courante et recommandée dans [10] est d'éliminer le terme de rang n et de définir
S
N= v e e t { e * * \ - j < k < j - l }
«* = j \ É <Xi)e~
ikXi- y < k < f - 1
i=o
L'intérêt de cette modification est que l'algorithme FFT est d'autant plus efficace que les facteurs premiers de N sont petits, c'est-à-dire qu'il est opti-mal pour les puissances de 2. Dans la suite, nous supposerons toujours que N est pair. Nous utiliserons aussi les propriétés fondamentales suivantes qui sont à la base de l'algorithme FFT.
Soient
é2-%- j = 0 , . . . , N - 1
1 ^_4 .2jpT 1 si p est un multiple de N
iV J=o 0 sinon.
L'identité (2.2.12) a plusieurs corollaires. Voici les principaux. 1. Transformée discrète inverse. Pour tout u G S^,
2 l
(2.2.13) w(xj) = ^ ùkeikx> j = 0,..., N - l .
K— 2
2. Produit scalaire discret. Pour tout u,v G SV
/•2TT 2 7 r W _ 1
(2.2.14) < u, v > = / u(x)u(x) dx = — y^u(xj)v(xj).
Jo N ,_n
REMARQUE 2.2.1.
1. La relation (2.2.14) implique que, pour une fonction de SN,
N N (2.2.15) ùfc = ûfc, fc = - — , . . . , — - 1 ,
c'est-à-dire que les coefficients de Fourier discrets et continus coïncident. 2. En utilisant la relation fondamentale (2.2.13), on déduit directement que, pour tout u G C°(IP), l'unique interpolant de u aux noeuds de A„ est donné par
2 1
~ JMx
(2.2.16) INU(X) = ^ 2 ùk£ fc—
48 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX Dans le contexte des éléments finis, il serait utile d'obtenir une version " de Lagrange" de la formule (2.2.16). Pour ce faire, introduisons la famille
f
-1(2.2.17) ^ 4 E
fc—^ ék(X'
Xi)J = °> -'
N~
LIl découle directement de (2.2.12) que cette famille est lagrangienne donc qu'elle forme une base. En plus on peut l'utiliser pour réécrire IN sous la forme
(2.2.18) INu(x) = Y^ u(xj)(pj(x).
En utilisant (2.2.14), on remarque que cette base est aussi orthogonale. C'est avec elle que nous construisons nos nouveaux éléments.
2.2.2 Interpolation trigonométrique, le cas Réel
Le choix d'un nombre pair de points d'interpolation dans la direction de périodicité est dicté par des considérations algorithmique. Cependant ce choix a également un coût en terme d'espace mémoire. En effet, chacune des fonc-tions de bases lagrangiennes (2.2.17) a une partie imaginaire non nulle à
N
cause de la disparition de l'élément e~ïx de la base initiale. En particulier, l'interpolant d'une fonction réelle a nécessairement une partie imaginaire,
N
sauf dans le cas où la composante de cette fonction dans la direction e~^x est nulle. Une des conséquences importantes de cette remarque est que les matrices obtenues par discrétisation des opérateurs aux dérivées partielles
seront complexes ce qui requerra plus d'espace mémoire et pourra créer des problèmes de stabilité dans le cas instationnaire. En outre, puisque notre but est une étude de stabilité linéaire, il est un peu ennuyeux d'approximer des spectres symétriques par rapport à la droite réelle par des spectres qui n'ont pas cette propriété.
Ce problème est connu et plusieurs approches peuvent être retenues pour le contourner. Celle qui est la plus fréquemment utilisée [33], consiste à
mo-N
difier l'espace d'approximation en remplaçant la fonction de base e~^x par cos ( y x). L'espace d'approximation est alors
SN = vect {cos l — x ) , eikx, k = - — + 1 , . . . , — - 1 } et un élément de SN s'écrit
s(x) = S * _ N C O S ( — X ) + Y^ skelkx
Evidemment, par symétrie des exponentielles de rang inférieur à y , une fonction de SN sera à valeurs réelles si et seulement si s0 et ê*_N sont réels.
2
Les autres coefficients satisfont la relation
(2.2.19) Jfc = s_fc,fc = ! , . . , - - ! . Remarquons que, dans ce cas,
50 CHAPITRE 2. ELEMENTS FINIS SPECTRAUX Cherchons maintenant le SV-interpolant d'une fonction continue u, à valeurs réelles, aux noeuds de AN- A cet effet, notons que la définition (2.2.11) im-plique que la relation (2.2.19) est aussi valable pour les coefficients de Fourier discrets, que ù0 est réel et qu'il en va de même pour Û_N. Le 5^-interpolant
2
de u peut donc s'écrire
2 l
IN(u)(x) = û _ N e ~ ^x -r ù0 + 2 Y^ ïï(ûkeikx)
i
et, puisque e~l^x = cos ( y x) pour x G AN, la fonction de SN définie par
N £-> IN(u)(x) = $t(IN(u)(x)) = Ù_N cos(— x) -f 2_\ ûkel k x.
2 + 1
coïncide avec I N aux noeuds et est l'interpolant recherché. Pour obtenir une version "de Lagrange", nous utilisons (2.2.18),
(
N - \ \ N - \J 2 U(XJ) <j>j{x) = Y , <
xi )
U(M
X))-j=0 ) j = 0
On vérifie directement que les fonctions $î.(<pj(x)),j = 0... N — 1 sont des fonctions de SN qui satisfont la propriété de Lagrange. Elles forment la base avec laquelle nous allons travailler. A partir de maintenant, nous les noterons
h = u(<f>j).
Par ailleurs, pour u E SN,
N 2 .
u(x) = ÏN(U)(X) = Û_N cos(—- x) + 2_\ ùkelkx. 2 2.