Contribution à la conception silencieuse par démarches directe et inverse de machines synchrones à aimants permanents et bobinage dentaire
Texte intégral
Figure
![Tableau 1: Consommation des moteurs électriques par secteurs d’activités établit selon [7]](https://thumb-eu.123doks.com/thumbv2/123doknet/2497309.51262/26.893.95.804.227.589/tableau-consommation-moteurs-electriques-secteurs-activites-etablit.webp)
![Figure 29: Classification des machines synchrones [40], [41].](https://thumb-eu.123doks.com/thumbv2/123doknet/2497309.51262/40.893.121.777.362.676/figure-classification-des-machines-synchrones.webp)
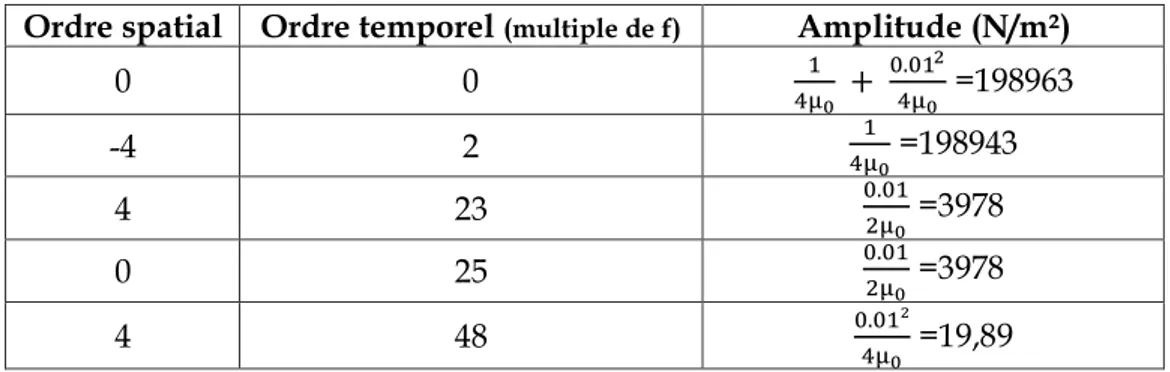
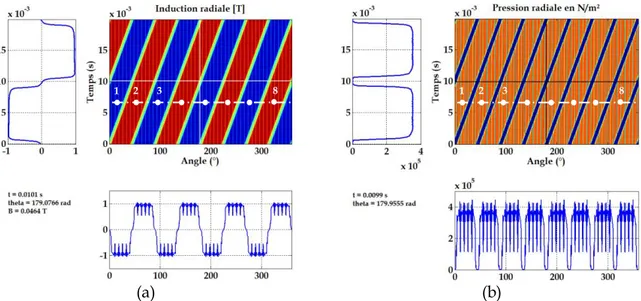
![Figure 38: Spectre de la pression radiale et Onde de pression [-4,2]](https://thumb-eu.123doks.com/thumbv2/123doknet/2497309.51262/50.893.113.719.237.557/figure-spectre-pression-radiale-onde-pression.webp)
![Figure 43:Comparaison de l'induction radiale à vide pour les machines: MSAPS-MSAPE.[59]](https://thumb-eu.123doks.com/thumbv2/123doknet/2497309.51262/53.893.138.752.98.349/figure-comparaison-induction-radiale-vide-machines-msaps-msape.webp)
Outline
Documents relatifs
Mots clés : polyphasé, vecteurs d‘espace, MLI, machine synchrone polyphasée (MSAP), onduleur de tension, triphasé, pentaphasé, système SMM, conversion
Mots-clés : machine synchonre à aimants permanents, commande sans capteur mécanique, actionneur électromécanique, méthode d'estimation de la position à basse
En cas de défauts, l’actionneur peut être amené à ne faire fonctionner qu’un des deux enroulements ; l’utilisation de machines à aimants permanents dans ces conditions, induit
Étude de la Désaimantation dans l’Air d’un Inducteur Cylindrique de Machines à Aimants permanents montés..
Afin de v4rifier la validit4 de notre mod41isation cellulaire, nous averts conqu et r4alisd un bloc monophas4 de machine cylindrique utilisant des aimants ferrites conforme h la
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Nous avons choisi de se limiter aux machines synchrones à aimants permanents MSAP, à rotor bobiné MSRB et à double excitation MSDE, car ce sont les machines les plus
Après avoir réalisé une recherche bibliographique exhaustive, deux machines à aimants ont attiré notre attention : la machine à flux radial double entrefer et la
