Apport de l'étude conjointe de systèmes dynamiques libres et commandés dans la compréhension des concepts d'équilibre et de stabilité
272
0
0
Texte intégral
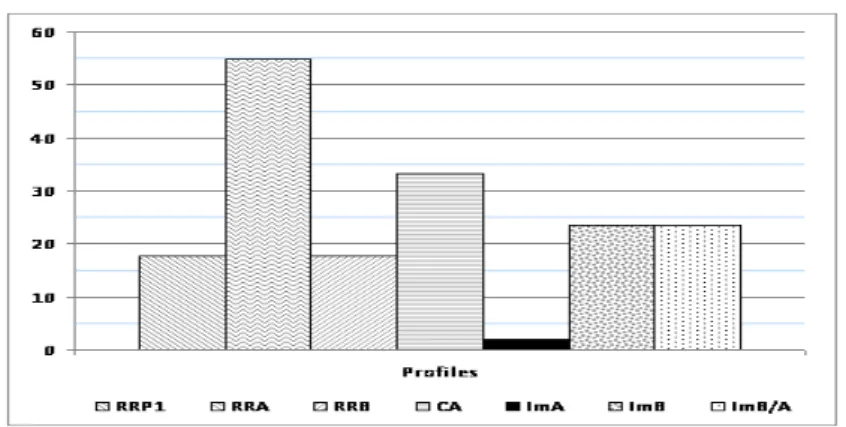
Figure


+7



Outline
Analyse des données Partie
Analyse lexicographique
La conservation du mouvement
Les cadres de référence liés au changement conceptuel Le Changement Conceptuel
Analyse des conceptions
Champ des contraintes Pré-requis
Description de la séquence
Deuxième session, premier semestre
Conclusions et perspectives
Discussion des résultats
Documents relatifs