Développement d'une nouvelle méthode de calibrage
des Systèmes LiDAR Mobiles (SLM) en laboratoire
Mémoire
Michaël Landry
Maîtrise en sciences géomatiques
Maître ès sciences (M. Sc.)
Québec, Canada
© Michaël Landry, 2017
Développement d'une nouvelle méthode de calibrage
des Systèmes LiDAR Mobiles (SLM) en laboratoire
Mémoire
Michaël Landry
Sous la direction de :
Christian Larouche, directeur de recherche
Marc Cocard, codirecteur de recherche
Résumé
Le scanner LiDAR est une technologie de plus en plus populaire auprès des ingénieurs, arpenteurs-géomètres, architectes et autres professionnels qui ont recours à la modélisation 3D dans le cadre de leur travail. L'intégration de ce capteur à un système de navigation (IMU + GNSS) permet de former un Système LiDAR Mobile (SLM). Les SLM ont été initialement développés pour des véhicules aéroportés, mais ont été plus récemment adaptés aux véhicules terrestres. Toutes les observations du SLM sont combinées pour former un nuage de points par géoréférencement direct. De manière à limiter la propagation des erreurs systématiques dues à l'assemblage de ces capteurs, un calibrage du système est nécessaire.
Le calibrage d'un SLM implique la détermination des bras de levier et des angles de visée qui correspondent sommairement à la distance et à l'orientation entre le LiDAR et l'IMU. Le fabricant fournit habituellement des valeurs pour ces éléments, mais il est nécessaire de peaufiner ces valeurs qui sont propres à chaque système. Étant donné qu'il est impossible de déterminer précisément les angles de visée avec des mesures manuelles, les observations sur le terrain sont utilisées afin de les estimer (calibrage in situ). Un problème avec le calibrage in situ est que les observations GNSS introduisent des erreurs de plusieurs centimètres dans la solution, ce qui nuit au calibrage. Pour éliminer le recours aux observations GNSS, des méthodes alternatives de calibrage s'imposent.
Le but de ce travail de recherche est d'instaurer une procédure de cueillette et de traitement des données acquises par un SLM en laboratoire de façon à développer une méthode de calibrage libre d'erreurs de positionnement GNSS. Cette méthode de calibrage doit permettre d'estimer les angles de visée et les bras de levier d'un SLM à partir des instruments et des infrastructures présentes au laboratoire de métrologie de l’Université Laval.
Abstract
The LiDAR scanner is an increasingly popular technology for engineers, land surveyors, architects and other professionals who use 3D modeling as part of their work. The integration of this sensor with a navigation system (IMU + GNSS) makes it possible to form a Mobile LiDAR System (MLS). MLSs were originally developed for airborne vehicles, but were more recently adapted to land vehicles. All MLS observations are combined to form a point cloud by direct georeferencing. In order to limit the propagation of systematic errors due to the assembly of these sensors, it is necessary to properly calibrate the system. The calibration of an MLS involves the determination of the lever arms and boresight angles that correspond to the distance and orientation between the LiDAR and the IMU. The manufacturer usually provides values for these elements, but it is necessary to fine-tune these values that are unique to each system. Since it is impossible to accurately determine boresight angles with manual measurements, field observations are used to estimate them (in situ calibration). A problem with in situ calibration is that GNSS observations introduce errors of several centimeters into the solution, which is harmful for a proper calibration. In order to eliminate the need for GNSS observations, alternative methods of calibration are required.
The aim of this research is to set up a procedure for the collection and processing of data acquired by an MLS in a laboratory in order to develop a calibration method free of GNSS positioning errors. This calibration method should allow estimation of the boresight angles and the lever arms of an MLS with the instruments and infrastructures inside the metrology laboratory of Laval University.
Table des matières
Résumé ... iii
Abstract ... iv
Table des matières ... v
Liste des tableaux ... viii
Liste des figures ... xi
Remerciements ... xiii Chapitre 1 : Introduction ... 1 1.1. Mise en contexte... 1 1.2. Problématique ... 4 1.3. Solution proposée ... 8 1.4. Objectifs ... 9
Chapitre 2 : Revue de littérature ... 12
2.1. Les méthodes de calibrage non rigoureuses ... 12
2.2. Les méthodes de calibrage semi-rigoureuses in situ ... 15
2.3. Les méthodes rigoureuses de calibrage in lab ... 22
Chapitre 3 : Présentation de la méthodologie ... 27
3.1. Description sommaire de la méthode ... 27
3.2. La localisation par intersection spatiale ... 29
3.3. La transformation de coordonnées ... 39
3.4. Le rattachement des distances interférométriques au système de coordonnées de référence ... 43
3.5. La localisation des cibles ... 56
3.6. L'incertitude des cibles ... 61
3.7. Détermination des coordonnés des cibles par scanner LiDAR terrestre ... 67
3.8. Acquisition de données avec le SLM pour le calibrage ... 70
Chapitre 4 : Traitement des données ... 76
4.1. Retour sur les observations à traiter ... 76
4.2. Enregistrement des nuages de points LiDAR terrestre ... 79
4.3. Géoréférencement des nuages de points LiDAR terrestre ... 81
4.4. Formation du nuage de points à partir des données LiDAR mobile ... 88
4.5. Nettoyage des points erratiques ... 95
5.1. Définition des équations... 99
5.2. Pondération des observations... 103
5.3. Linéarisation des équations ... 104
5.4. Formation des matrices par une approche de construction séquentielle ... 107
5.5. Estimation des paramètres et de leur incertitude ... 108
Chapitre 6 : Présentation des résultats ... 112
6.1. Résultats de la collecte du 16 mai 2016 ... 112
6.2. Résultats de la collecte du 22 décembre 2017 ... 123
Chapitre 7 : Analyse des résultats... 127
7.1. Différence entre les paramètres par rapport à leur écart-type estimé ... 127
7.2. Tests statistiques sur le facteur de variance ... 128
7.3. Installation du MX2 sur le banc de calibrage ... 132
7.4. Fidélité et justesse des mesures de portée LiDAR ... 136
7.5. Fidélité et justesse des observations de l'IMU... 139
7.6. Impact des paramètres de calibrage sur les observations ... 143
Chapitre 8 : Conclusion ... 150
8.1. Retour sur les objectifs ... 150
8.2. Recommandations pour des travaux futurs ... 152
Bibliographie ... 156
Annexe A : Fonctions Matlab permettant de traiter les données recueillies par les stations totales et l'interféromètre ... 159
A.1. F_BacksideCorrection ... 159 A.2. F_AngleCalculator ... 159 A.3. F_CoordCalculator ... 160 A.4. F_ScaleDist ... 160 A.5. F_Alignment ... 161 A.6. F_PointToLine ... 161 A.7. F_RotationTranslation ... 161 A.8. F_det_param6 ... 162 A.9. F_apply_param6 ... 162 A.10. F_UTMmerid ... 163 A.11. F_UTMproj ... 163 A.12. F_UTMproj_inv ... 163 A.13. F_VarCovMatrix ... 164 A.14. F_Local2GlobalUTM ... 164
Annexe B : Fonctions Matlab permettant d'éliminer les points erratiques .. 165
B.1. F_SphereCenterExtractor ... 165
Annexe C : Fonctions Matlab permettant d'appliquer la nouvelle méthode de
calibrage... 166
C.1. F_Calibration ... 166
C.2. F_ComputeXYZPoint_1Line ... 166
Liste des tableaux
Tableau 2.1 : Résultats de l’application de la méthode de Le Scouarnec et al. (2014) ... 25
Tableau 3.1 : Fiche technique des stations totales utilisées ... 29
Tableau 3.2 : Visée arrière de la station numéro 1 en lunette directe ... 31
Tableau 3.3 : Visée arrière de la station numéro 1 en lunette renversée ... 31
Tableau 3.4 : Visée arrière de la station numéro 2 en lunette directe ... 31
Tableau 3.5 : Visée arrière de la station numéro 2 en lunette renversée ... 31
Tableau 3.6 : Correction à apporter à toutes les observations ... 32
Tableau 3.7 : Différence entre la longueur mesurée et théorique des mires graduées ... 38
Tableau 3.8 : Correction de la distance entre les stations avec un facteur échelle ... 38
Tableau 3.9 : Différence entre la longueur mesurée et théorique des mires après la correction de la distance entre les stations ... 39
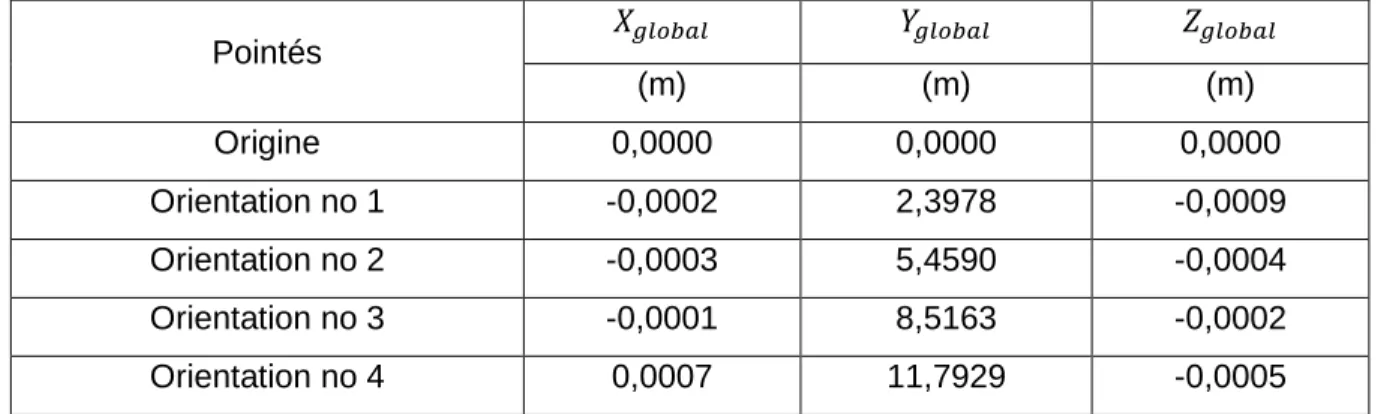
Tableau 3.10 : Coordonnées mesurées des pointés d'orientation sur le banc de calibrage ... 41
Tableau 3.11 : Coordonnées du point moyen ... 41
Tableau 3.12 : Définition du paramètre de translation à appliquer... 42
Tableau 3.13 : Définition du paramètre de rotation à appliquer ... 42
Tableau 3.14 : Coordonnées transformées des pointés d'orientation sur le banc de calibrage ... 43
Tableau 3.15 : Coordonnées des trous de fixation et du centre de gravité de l’IMU ... 48
Tableau 3.16: Coordonnées mesurées des quatre trous au site numéro 2 ... 51
Tableau 3.17 : Coordonnées du centre de l'IMU dans le système de coordonnées global 52 Tableau 3.18 : Coordonnées de la pointe dans le système de coordonnées global ... 52
Tableau 3.19 : Valeur des constantes initiales à chaque site ... 53
Tableau 3.20 : Lacet mesuré à chacun des trois sites... 54
Tableau 3.21 : Comparaison entre les deux collectes de données... 54
Tableau 3.22 : Constantes initiales et lacet en direction inverse ... 55
Tableau 3.23 : Hauteur totale de l'ensemble formé par la pointe de jalon et l'adaptateur d'embase ... 58
Tableau 3.24 : Coordonnées ellipsoïdales de la pointe d'origine ... 60
Tableau 3.25 : Coordonnées UTM de la pointe d'origine ... 60
Tableau 3.26 : Coordonnées UTM des sphères déterminées par intersection spatiale .... 61
Tableau 3.27 : Écart-type des mesures de directions horizontales et verticales calculé à partir des observations par rapport à l'erreur de fidélité théorique de l’instrument ... 62
Tableau 3.28 : Écart-type associé à chaque type d'observation ... 63
Tableau 3.29 : Écart-type des coordonnées des sphères dans le système de référence global ... 64
Tableau 3.30 : Paramètres d'acquisition du FARO Focus 3D X330 ... 69
Tableau 4.1 : Description sommaire des programmes permettant de traiter les données recueillies par les stations totales et l'interféromètre ... 78
Tableau 4.2 : Résiduelles de l'enregistrement des deux nuages de points ... 80
Tableau 4.3 : Résiduelles de la transformation des quatre sphères de référence ... 81
Tableau 4.4 : Écart-type des observations des sphères de référence par rapport à l'écart-type de toutes les observations ... 82
Tableau 4.5 : Résiduelles de la transformation des quatre sphères de référence pour chaque scan... 85
Tableau 4.6 : Résiduelles de la transformation des trois sphères de référence pour chaque
scan ... 85
Tableau 4.7 : Résiduelles de la transformation des quatre sphères de référence ... 86
Tableau 4.8 : Caractéristiques et coordonnées des 18 sphères extraites du nuage de points ... 87
Tableau 4.9 : Les cinq grandes étapes permettant de modifier le fichier de navigation .gps ... 90
Tableau 4.10 : Liste des observations contenues dans le fichier de navigation devant faire l'objet de modifications ... 91
Tableau 4.11 : Observations de tous les capteurs permettant de localiser un point à la surface d'une sphère ... 95
Tableau 4.12 : Description sommaire du programme et des fonctions permettant d'éliminer les points erratiques ... 96
Tableau 4.13 : Comparaison des nuages de points avant et après le nettoyage ... 97
Tableau 5.1 : Valeur des bras de levier et des angles de visée a priori ... 101
Tableau 5.2 : Dérivées partielles formant la matrice B ... 104
Tableau 5.3 : Dérivées partielles formant la première matrice 1 ... 105
Tableau 5.4 : Dérivées partielles formant la deuxième matrice 2 ... 105
Tableau 5.5 : Dérivées partielles formant la matrice A ... 105
Tableau 5.6 : Dérivées partielles formant la première matrice 1 ... 106
Tableau 5.7 : Dérivées partielles formant la deuxième matrice 2 ... 106
Tableau 5.8 : Dimensions des matrices ... 107
Tableau 5.9 : Description sommaire du programme et des fonctions permettant d'appliquer la nouvelle méthode de calibrage ... 111
Tableau 6.1 : Écarts par rapport aux sphères de référence avant le calibrage ... 113
Tableau 6.2 : Estimation de l'erreur de portée du laser du MX2 ... 116
Tableau 6.3 : Coordonnées des sites d'échantillonnage ... 117
Tableau 6.4 : Largeur mesurée entre les murs par les deux instruments ... 118
Tableau 6.5 : Valeurs estimées des sept paramètres de correction et de leur écart-type 120 Tableau 6.6 : Valeurs des paramètres avant et après le calibrage ... 120
Tableau 6.7 : Écarts par rapport aux sphères de référence après le calibrage pour la solution à sept paramètres ... 121
Tableau 6.8 : Écarts par rapport aux sphères de référence avant le calibrage sans considérer l'erreur de portée du laser ... 122
Tableau 6.9 : Valeurs estimées des quatre paramètres de correction et de leur écart-type ... 122
Tableau 6.10 : Écarts par rapport aux sphères de référence pour la solution à quatre paramètres ... 123
Tableau 6.11 : Paramètres estimés dans les 2 directions ... 124
Tableau 6.12 : Écarts par rapport aux sphères de référence pour la solution à sept paramètres dans les deux directions ... 124
Tableau 6.13 : Valeurs estimées des sept paramètres de correction et de leur écart-type pour la solution dans les deux directions ... 125
Tableau 6.14 : Écarts par rapport aux sphères de référence pour la solution complète à sept paramètres ... 125
Tableau 6.15 : Valeurs estimées des quatre paramètres de correction pour toutes les collectes de données ... 126
Tableau 7.2 : Impact de l'utilisation des paramètres de calibrage déterminés le 16 mai 2016 sur le centre des sphères mesurées par le MX2 le 22 décembre 2016 ... 145 Tableau 7.3 : Différence entre les paramètres de correction entre les deux collectes en direction avant ... 146 Tableau 7.4 : Différence entre les paramètres de calibrage entre les deux directions pour la collecte du 22 décembre 2016 ... 146 Tableau 7.5 : Impact de l'utilisation des paramètres de calibrage déterminés en direction avant sur le centre des sphères mesurées par le MX2 en direction arrière pour la collecte du 22 décembre 2016... 147 Tableau 7.6 : Différence entre les paramètres de correction après l'ajout d'une constante sur la coordonnée Y du centre de l'IMU en direction arrière ... 149
Liste des figures
Figure 1.1 : Balayage de la scène avec un scanner LiDAR 2D par le déplacement d'un
véhicule (Cahalane et al., 2014) ... 2
Figure 1.2 : Exemple d'un SLM monté sur une camionnette (Position Partners, 2010) ... 2
Figure 1.3 : Exemple d'une plateforme aérienne illustrant le mouvement de roulis (roll), de tangage (pitch) et de lacet (heading) (Oxford Technical Solutions Ltd., 2014) ... 3
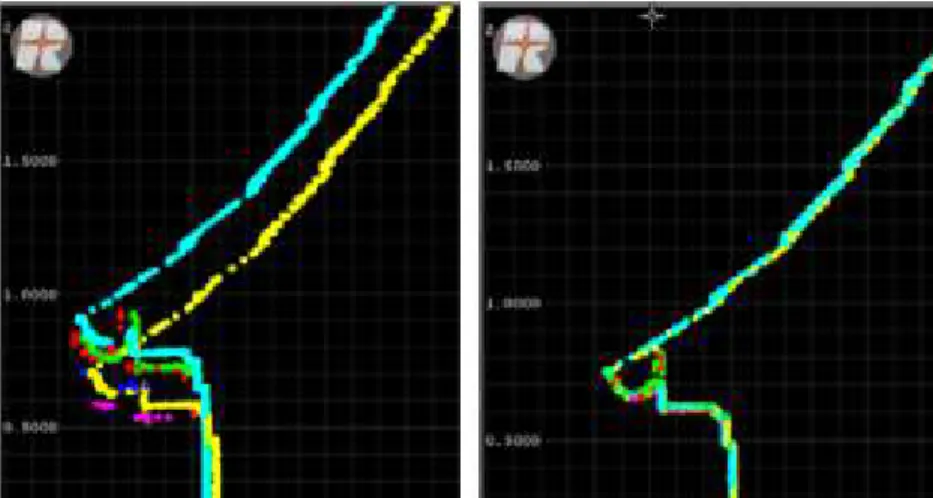
Figure 1.4 : Impact d'un SLM non calibré (à gauche) vs un SLM calibré (à droite) sur la localisation des murs et du toit d'un bâtiment à partir de plusieurs passages (Rieger et al., 2010) ... 5
Figure 1.5 : Impact d'un SLM non calibré (à gauche) vs un SLM calibré (à droite) sur la localisation des détails d'une toiture d'un bâtiment à partir de plusieurs passages (Rieger et al., 2010) ... 6
Figure 1.6 : Interféromètre laser et banc de calibrage du Laboratoire de métrologie du Département des sciences géomatiques de l’Université Laval ... 8
Figure 1.7 : Drone LiDAR AL3-16 de la marque Phoenix Aerial (Phoenix Aerial Systems, 2014)... 10
Figure 1.8 : Système LiDAR mobile personnalisé à l'UQAR (Didier et al., 2015) ... 10
Figure 2.1 : Méthode d'ajustement proposée par Kilian, Haala et Englich (1993) ... 13
Figure 2.2 : Montage LiDAR-IMU sur la table tournante de haute précision (Le Scouarnec et al., 2014) ... 23
Figure 2.3 : Extraction des lignes formées par des points sur un plan (Le Scouarnec et al., 2014)... 23
Figure 3.1: Pièce immobile (origine du système de coordonnées) ... 28
Figure 3.2 : Pièce mobile (orientation du système de coordonnées) ... 28
Figure 3.3: Triangle formé par la méthode de l'intersection spatiale ... 30
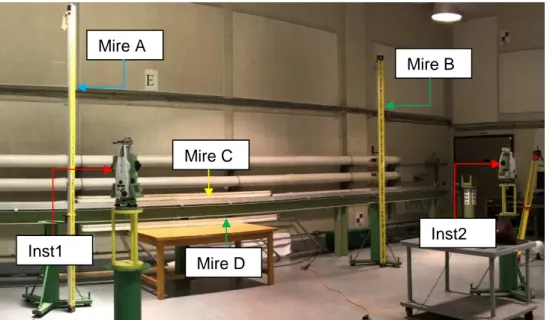
Figure 3.4 : Position des mires et des stations totales dans le laboratoire ... 36
Figure 3.5 : Type de cible utilisée aux extrémités de chaque mire ... 37
Figure 3.6: Les trois axes du système de coordonnées global ... 40
Figure 3.7 : Localisation de la pièce mobile pour les mesures d'orientation du banc de calibrage ... 40
Figure 3.8 : Le SLM fixé au charriot mobile sur le banc de calibrage ... 44
Figure 3.9 : Les différentes versions du MX2 (Trimble, 2014) ... 44
Figure 3.10 : Les trois composantes interférométriques ... 45
Figure 3.11 : Position de l'IMU sur le banc de calibrage ... 46
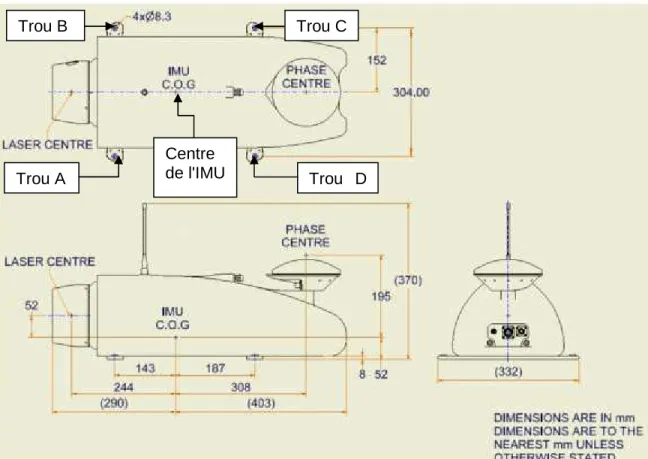
Figure 3.12 : Plan de conception du fabricant (Trimble, 2013a) ... 48
Figure 3.13 : Vue du dessus du MX2 ... 49
Figure 3.14 : Trous faits sur mesure sur la plateforme fixée au charriot mobile ... 50
Figure 3.15 : Éléments mesurés aux trois sites sur le banc de calibrage ... 51
Figure 3.16 : Sphère fixée à une embase ... 57
Figure 3.17 : Pointe de jalon fixée à une embase ... 57
Figure 3.18 : Trois pointes de jalon (à gauche) et grande sphère (à droite) ... 57
Figure 3.19 : Modèle de vernier électronique utilisé ... 58
Figure 3.20 : Impact de la position d’une sphère sur la géométrie du triangle d’observation ... 65
Figure 3.21 : Répartition des damiers dans le laboratoire ... 66
Figure 3.22 : Répartition des sphères dans le laboratoire ... 67
Figure 3.24 : Position des sphères vue de la station de scan numéro 2 ... 68
Figure 3.25 : Démonstration de la couverture d’une sphère avec des lignes de scan ... 74
Figure 4.1 : Plan de localisation du scanner par rapport aux sphères dans le laboratoire 84 Figure 4.2 : Nuage de points capté par un scanner LiDAR mobile ... 93
Figure 4.3 : Sélection manuelle des points sur la sphère 12 ... 94
Figure 4.4 : Sélection manuelle des points sur la sphère 16 ... 94
Figure 6.1 : Écart sur la sphère numéro 11 ... 114
Figure 6.2 : Écart sur la sphère numéro 16 ... 114
Figure 7.1 : Estimation de l'angle de visée associé au lacet (Ψ) ... 127
Figure 7.2 : Estimation de l'angle de visée associé au roulis (φ) ... 127
Figure 7.3 : Estimation de l'angle de visée associé au tangage (θ) ... 128
Figure 7.4 : Estimation de l'erreur de portée du laser (ρ) ... 128
Figure 7.5 : Espace entre la vis et le trou de fixation ... 132
Figure 7.6 : Plan du fabricant montrant l’axe central du MX2 (Trimble, 2013a) ... 136
Figure 7.7 : Émetteur et récepteur du pulse laser du MX2 ... 137
Figure 7.8 : Nuage de points de la sphère 12 (vue en angle) ... 138
Figure 7.9 : Ligne de scan de la sphère 5 (vue en coupe) ... 138
Figure 7.10 : Écart-type du lacet, du roulis et du tangage en fonction du temps ... 140
Figure 7.11 : Roulis et tangage en fonction du temps ... 140
Figure 7.12 : Roulis en fonction de la coordonnée Y du centre de l'IMU dans le système de coordonnées global ... 141
Figure 7.13 : Tangage en fonction de la coordonnée Y du centre de l'IMU dans le système de coordonnées global ... 142
Remerciements
Deux années, ça passe vite. À pareille date, il y a deux ans, je terminais mon baccalauréat et je pensais seulement à réussir les examens d'admission à l'Ordre des arpenteurs-géomètres du Québec. La possibilité de poursuivre mes études à la maîtrise ne prenait pas encore beaucoup de place dans mon esprit. Pourtant, me voilà déjà tout près d'avoir un deuxième diplôme universitaire en poche. Ce parcours aurait toutefois été plus difficile sans plusieurs personnes sur lesquelles j'ai pu compter.
Je voudrais profiter de ce moment pour tout d'abord remercier Christian Larouche, mon directeur de recherche. Nos nombreux échanges et rencontres m'ont permis d'avancer dans ce projet et d'atteindre mes objectifs. J'ai aussi beaucoup apprécié son aide pour la cueillette, le traitement et l'analyse des données. En gros, je veux le remercier pour sa grande disponibilité!
Je veux aussi remercier Marc Cocard, mon codirecteur de recherche, pour ses conseils et ses enseignements sur la théorie de la méthode des moindres carrés qui ont été très utiles dans ce travail. Merci aussi d'avoir pris le temps de répondre à toutes mes questions et de m'avoir éclairé sur le cheminement à suivre pour la poursuite d'études au deuxième cycle. J'aimerais aussi remercier Guy Montreuil qui a fabriqué des pièces sur mesure pour mon projet et qui a été d'une précieuse aide lors de mes journées passées au laboratoire. Merci aussi à Sylvie Daniel pour le prêt d'un scanner LiDAR terrestre et de ses accessoires qui ont été indispensables pour mon travail de recherche. Je tiens également à remercier les gens du Département des sciences géomatiques avec qui c'est toujours plaisant d'échanger sur des sujets qui peuvent être plus ou moins sérieux.
Je tiens aussi à remercier la Faculté de foresterie, de géographie et de géomatique via le Fonds de démarrage aux nouveaux chercheurs : mesure et captage haute précision obtenu par mon directeur de recherche pour le soutien financier constant reçu tout au long de cette maîtrise. Je remercie également le Fonds Joncas de l'Ordre des arpenteurs-géomètres du Québec pour la bourse d'études qu'ils m'ont décernée. Un coup de pouce financier est toujours apprécié!
Un grand merci à Trimble Geospatial pour le prêt du MX2 et à Yves Thériault du Service de la géodésie et des levés géospatiaux du Ministère de l'Énergie et des Ressources naturelles pour le prêt d'un câble GPS qui ont permis de rendre possible l'acquisition de données dans le cadre de ce projet.
Merci à Robert, mon patron, et à tous mes collègues chez Ecce Terra arpenteurs-géomètres avec qui je travaille depuis cinq ans. Merci de m'avoir encouragé dans mes études et d'avoir été compréhensifs face à mon horaire qui n'était pas toujours facile ces deux dernières années! Merci également pour le prêt d'un scanner LiDAR terrestre et de ses accessoires qui m'ont été utiles à quelques occasions lors de cette maîtrise.
Je veux aussi remercier ma famille et mes amis. Avec le travail et les études, on n'a pas toujours le temps d'être présent pour ceux qu'on aime. Je tiens spécialement à remercier mes parents qui ont toujours été fiers de moi et qui m'ont toujours appuyé dans ce que j'entreprends. Je tiens aussi à remercier Laurence, ma belle-sœur, qui a pris la peine de lire ce mémoire en entier et de me faire part de ses commentaires.
Finalement, je tiens à remercier ma copine Gabrielle qui partage ma vie depuis maintenant cinq ans. Les dernières années n'ont pas toujours été faciles avec mon horaire très chargé. Heureusement qu'elle ne chôme pas non plus de son côté, car elle aurait trouvé le temps long à m'attendre! On va enfin pouvoir relaxer un peu cet été et profiter de notre nouvelle maison.
Encore une fois merci à tous! Michaël
Chapitre 1 : Introduction
1.1. Mise en contexte
L'effervescence de la géomatique au cours des 20 dernières années est principalement liée à l'émergence des nouvelles technologies. Une des technologies récentes qui révolutionne la collecte de données géospatiales est le LiDAR. De l'acronyme anglais Light Detection And Ranging, le LiDAR est un système de captage de données qui utilise la technologie laser pour effectuer la modélisation d'éléments sous la forme d'un nuage de points.
Le principe sur lequel repose la localisation d'un point par un scanner LiDAR est la mesure par réflexion directe, c'est-à-dire la mesure de portée par onde électromagnétique sans l'utilisation d'une cible ou d'un prisme. Pour localiser un point à l'aide de cette technique, le scanner LiDAR émet une impulsion laser et démarre un chronomètre. Le faisceau laser est dévié par un miroir rotatif. La position angulaire du miroir est connue en tout temps et il est donc possible de connaître la direction initiale du faisceau laser. Cette impulsion est réfléchie lorsqu'elle entre en contact avec un objet et elle retourne en direction de l'instrument qui arrête le chronomètre au retour de l'onde (Daniel, 2015).
Le temps inscrit sur le chronomètre renseigne sur le temps de parcours de l'onde dans le milieu. Puisqu’une onde électromagnétique voyage dans le vide à la vitesse de la lumière, on peut calculer la distance entre l'objet mesuré et l'origine du capteur LiDAR avec l'Équation 1.1.
= ×2 (1.1)
où ∶ mesure de portée laser;
∶ temps de parcours de l'onde dans le milieu; et ∶ vitesse de la lumière.
En mode statique, un scanner LiDAR 2D émet des pulses laser selon un arc de cercle bien défini. Lorsque le miroir rotatif effectue un tour complet, une nouvelle série de faisceaux laser sera réémise dans la même direction qu'à la révolution précédente.
Cependant, lorsqu'il est mis en mouvement, ce capteur permet d'effectuer un balayage de la scène et de capter des données sur une plus grande étendue, tel qu’illustré à la Figure 1.1.
Figure 1.1 : Balayage de la scène avec un scanner LiDAR 2D par le déplacement d'un véhicule (Cahalane et al., 2014)
La possibilité d'acquérir des données en déplaçant le capteur LiDAR a mené au développement des premiers Systèmes LiDAR Mobile (SLM). Ces systèmes ont tout d'abord été développés pour les plateformes aéroportées pour ensuite être adaptés aux véhicules terrestres tels des voitures, des véhicules tout terrain, etc. Un exemple de SLM monté sur une plateforme terrestre est présenté à la Figure 1.2.
Les SLM possèdent trois composantes principales : un capteur actif, soit le cas présent, une centrale inertielle communément
positionnement GNSS. L'apport de la première composante étant le
décrit ci-haut. Des précisions supplémentaires doivent cependant être apportées aux deux autres composantes.
Un IMU (Inertial Measurement Unit
et de gyroscopes qui permet de déterminer l'ori
d'une plateforme peut être décrite par trois angles mesurés par rapport aux trois axes orthogonaux d'un système de coordonnées : le roulis, le tangage et le lacet, tel que montré à la Figure 1.3.
Figure 1.3 : Exemple d'une plateforme aérienne illustrant le mouvement de roulis ( tangage (pitch) et de lacet
Le système de positionnement GNSS (Global Navigation Satellite System) est en fait le regroupement des différente
(GLONASS), européenne (Galileo) et chinoise (
positionnement GNSS et l'IMU forment le système de navigation d'un véhicule. Celui souvent complété par un autre capteur appelé DMI (
composé d’un encodeur optique installé sur une des roues du véhicule. Ce capteur produit des mesures de déplacement
navigation et permettent d’assurer une
situations de dégradation ou de perte du signal GNSS. Il est également possible d'ajouter une composante supplémentaire aux SLM comme des caméras numériques qui vont permettre la prise d'images en même temps
Les SLM possèdent trois composantes principales : un capteur actif, soit le LiDAR
cas présent, une centrale inertielle communément nommée IMU et un système de positionnement GNSS. L'apport de la première composante étant le LiDAR
haut. Des précisions supplémentaires doivent cependant être apportées aux deux
Inertial Measurement Unit) est un instrument électronique muni d'accéléromètres et de gyroscopes qui permet de déterminer l'orientation d'une plateforme. L'orientation d'une plateforme peut être décrite par trois angles mesurés par rapport aux trois axes orthogonaux d'un système de coordonnées : le roulis, le tangage et le lacet, tel que montré
: Exemple d'une plateforme aérienne illustrant le mouvement de roulis ( ) et de lacet (heading) (Oxford Technical Solutions Ltd., 2014)
Le système de positionnement GNSS (Global Navigation Satellite System) est en fait le regroupement des différentes constellations de satellites américaine
(GLONASS), européenne (Galileo) et chinoise (BeiDou/Compass). Le système de positionnement GNSS et l'IMU forment le système de navigation d'un véhicule. Celui souvent complété par un autre capteur appelé DMI (Distance Measurement Instru composé d’un encodeur optique installé sur une des roues du véhicule. Ce capteur produit
de déplacement du véhicule, lesquelles sont intégrées à la solution de navigation et permettent d’assurer une qualité de positionnement optimale dans situations de dégradation ou de perte du signal GNSS. Il est également possible d'ajouter une composante supplémentaire aux SLM comme des caméras numériques qui vont permettre la prise d'images en même temps que la capture des nuages de points.
LiDAR dans le et un système de LiDAR a déjà été haut. Des précisions supplémentaires doivent cependant être apportées aux deux
) est un instrument électronique muni d'accéléromètres entation d'une plateforme. L'orientation d'une plateforme peut être décrite par trois angles mesurés par rapport aux trois axes orthogonaux d'un système de coordonnées : le roulis, le tangage et le lacet, tel que montré
: Exemple d'une plateforme aérienne illustrant le mouvement de roulis (roll), de (Oxford Technical Solutions Ltd., 2014)
Le système de positionnement GNSS (Global Navigation Satellite System) est en fait le américaine (GPS), russe Compass). Le système de positionnement GNSS et l'IMU forment le système de navigation d'un véhicule. Celui-ci est Distance Measurement Instrument) composé d’un encodeur optique installé sur une des roues du véhicule. Ce capteur produit du véhicule, lesquelles sont intégrées à la solution de optimale dans les situations de dégradation ou de perte du signal GNSS. Il est également possible d'ajouter une composante supplémentaire aux SLM comme des caméras numériques qui vont
Les trois composantes principales d'un SLM effectuent des observations selon une fréquence propre à chacun de ces instruments de mesure. La haute stabilité de l'horloge interne du récepteur GNSS permet toutefois de synchroniser ces capteurs de façon à combiner leurs observations selon la même référence temporelle. La combinaison de ces instruments de mesure permet de capter des centaines de milliers de points par seconde avec une incertitude de quelques centimètres. Cependant, tel que discuté à la section suivante, la fidélité de mesure d'un instrument ne garantie pas sa justesse.
1.2. Problématique
Deux types d'erreurs affectent la qualité des mesures d'un SLM, soit les erreurs aléatoires et les erreurs systématiques. Les erreurs aléatoires sont liées à la fidélité des observations mesurées par les différents instruments tandis que les erreurs systématiques ont un lien avec la justesse des mesures. La fidélité d'un instrument est sa capacité à être constant dans sa prise de mesure tandis que la justesse d'un instrument est sa capacité à mesurer le plus près possible d'une valeur de référence (JCGM, 2012). Le concept d'écart-type est rattaché à la fidélité tandis que l'erreur moyenne quadratique est rattachée à la justesse. En géomatique, les instruments de captage de données doivent être fidèles et justes, c'est-à-dire qu'ils doivent non seulement toujours fournir des valeurs près les unes des autres, mais ils doivent aussi fournir des valeurs les plus proches possible de la réalité. La meilleure façon d'assurer la justesse des mesures est d'effectuer un calibrage des instruments.
Le principe du calibrage consiste à ajuster les instruments de mesure de façon à éliminer les erreurs systématiques, soit les biais présents dans les observations. Le terme calibrage s'apparente au terme ajustage d'un système de mesure (JCGM, 2012). Ce procédé diffère de l'étalonnage qui consiste à déterminer une relation entre les valeurs mesurées par un instrument et les valeurs réelles fournies par un étalon. Deux séries de paramètres jouent un rôle clé dans le géoréférencement d'un nuage de points capté par un SLM. Ces paramètres modélisent la géométrie interne entre les capteurs. La première série de paramètres correspond aux bras de levier entre le LiDAR et l'IMU, soit la distance entre l'origine du LiDAR et le centre de gravité de l'IMU décomposée dans un système d'axes orthogonaux en trois dimensions étant le système de coordonnées de l'IMU. Les bras de levier forment le vecteur contenu dans l'Équation 2.1 présentée au chapitre suivant. L'orientation relative entre les systèmes d'axes du LiDAR et de l'IMU, exprimée
par trois angles étant les angles de visée, correspond à la deuxième série de paramètres à déterminer par calibrage. Ces trois angles forment la matrice de changement de repère contenue dans l'Équation 2.1. Des valeurs pour les bras de levier et les angles de visée sont généralement fournies par le fabricant. Le calibrage sert donc à peaufiner les valeurs de ces paramètres de manière à minimiser l'impact des erreurs systématiques. Un troisième paramètre doit aussi être estimé lors du calibrage d'un SLM. Ce paramètre est la latence qui correspond à l'erreur de synchronisation entre deux systèmes de mesure causée par le délai requis pour la transmission des données. Étant donné qu'un SLM de qualité commerciale a été utilisé dans le cadre de ce travail de maîtrise, ce paramètre n'est pas traité dans ce mémoire.
Tel que mentionné précédemment, les SLM effectuent la collecte de données sous la forme d'un nuage de points. Advenant le cas où un SLM effectuerait deux passages au même endroit, les nuages de points propres à ces deux passages devraient théoriquement se superposer parfaitement. De ce fait, les seuls écarts qu'il serait possible de distinguer entre les nuages de points seraient dus aux erreurs aléatoires des mesures. Lorsque les angles de visée et les bras de levier sont mal modélisés, il est possible de constater des écarts plus ou moins grands entre les nuages de points. Par exemple, les représentations des murs et du toit d'un bâtiment présent dans plusieurs nuages de points seraient décalées les unes par rapport aux autres, tel qu'illustré à la Figure 1.4.
Figure 1.4 : Impact d'un SLM non calibré (à gauche) vs un SLM calibré (à droite) sur la localisation des murs et du toit d'un bâtiment à partir de plusieurs passages (Rieger et al.,
Le comportement des surfaces planes permet de bien distinguer les biais présents dans les nuages de points mesurés par un SLM non calibré. Des points pris séparément ne bénéficient pas de l'effet de groupe d'un plan. La Figure 1.5 fournit un plan rapproché de la Figure 1.4 montrant la différence entre les nuages de points pour la toiture du même bâtiment avant et après le calibrage.
Figure 1.5 : Impact d'un SLM non calibré (à gauche) vs un SLM calibré (à droite) sur la localisation des détails d'une toiture d'un bâtiment à partir de plusieurs passages (Rieger
et al., 2010)
La détermination des angles de visée et des bras de levier par calibrage est donc nécessaire pour assurer que les données acquises par ce système soient exemptes d'erreurs systématiques. L'impact des erreurs de calibrage est directement observable dans le nuage de points. C'est pour cette raison que la plupart des méthodes de calibrage utilisent les observations elles-mêmes de manière à détecter les erreurs systématiques et à les modéliser. Étant donné que les observations sont utilisées, il est certain que la fidélité et la justesse de celles-ci influencent la qualité du calibrage. Ces éléments sont directement liés au capteur utilisé.
La plupart des scanners LiDAR permettent de mesurer des portées avec une erreur de fidélité et de justesse de 1 centimètre ou moins à une distance pouvant aller jusqu'à 50 mètres. Par exemple, le modèle MX8 de Trimble avec une configuration VQ-450 permet d'enregistrer des mesures de portée avec une erreur de justesse de 8 millimètres et une erreur de fidélité de 5 millimètres à une distance de 50 mètres (Trimble, 2013c). Une erreur exprimée en fonction d'une distance de 50 mètres dans un contexte d'acquisition avec un SLM est très représentative puisqu'en milieu urbain, les façades des bâtiments et
les éléments à mesurer sont souvent situés à une distance inférieure à cette valeur qui devient en quelque sorte l'erreur maximale.
Les angles mesurés par l'IMU contribuent aussi aux erreurs aléatoires présentes dans le nuage de points. La plupart des usagers des SLM n'utilisent pas directement les valeurs mesurées de ces angles, mais optent plutôt pour une solution en post-traitement. Pour le modèle VMX-1HA de Riegl, les valeurs pour le roulis et le tangage obtenues après post-traitement ont une erreur de justesse estimée de 0,005° contre une valeur de 0,015° pour le lacet (Riegl, 2016). Les valeurs estimées dans ces conditions sont les mêmes pour le modèle MX8 de Trimble énoncé précédemment.
Le dernier type d'observations utilisées correspond aux observations provenant du récepteur GNSS. Pour optimiser la fidélité et la justesse de la position calculée par GNSS, le mode de positionnement relatif avec une station de base et les mesures de phase avec ambiguïtés fixées doivent être utilisés. La qualité du positionnement GNSS dans un contexte de captage de données mobiles en territoire urbain peut être dégradée étant donné que plusieurs obstacles peuvent nuire à l'acquisition des signaux GNSS. La hauteur des bâtiments et des structures de béton peut couper le signal de certains satellites et ainsi empêcher la résolution des ambiguïtés de phase. De ce fait, le calcul des coordonnées en est affecté. C'est pour cette raison qu'il est grandement recommandé de procéder au post-traitement des données GNSS en intégrant les données de l'IMU de manière à obtenir une solution de navigation complète. Le taux d'échantillonnage supérieur de l'IMU et le fait qu'il ne soit pas sensible aux obstacles environnants en font un allié de taille au récepteur GNSS. Selon la fiche technique du modèle MX8 de Trimble, une solution de positionnement après post-traitement peut être obtenue avec une erreur de justesse de 2 centimètres en planimétrie (X,Y) et de 5 centimètres en altimétrie (Z) (Trimble, 2013c). Lors d'une perte de signaux GNSS, la solution se dégrade et l'incertitude des coordonnées après post-traitement est de 10 centimètres en planimétrie contre 7 centimètres en altimétrie.
Les erreurs de justesse et de fidélité de toutes les observations se propagent sur les coordonnées du nuage de points. On constate toutefois que la solution de positionnement obtenue par le récepteur GNSS contribue pour la majorité du budget total d'erreur des observations pour le géoréférencement du nuage de points. Puisque les paramètres de calibrage sont directement estimés à partir des observations, il est certain que les erreurs
liées aux observations GNSS se propagent directement dans la solution de calibrage. Cette affirmation est surtout vraie dans un contexte d'acquisition de données au sol où les distances mesurées sont beaucoup plus courtes que dans un contexte d'acquisition de données à partir d'un véhicule aéroporté où les distances peuvent atteindre plusieurs centaines voire même quelques milliers de mètres. Il devient donc nécessaire de trouver une façon d'estimer les bras de levier et les angles de visée du SLM en minimisant l'impact de l'erreur de positionnement GNSS.
1.3. Solution proposée
La nouvelle méthode de calibrage développée dans le cadre de cette maîtrise est réalisée en laboratoire. Le Département des sciences géomatiques de l’Université Laval dispose d’un laboratoire de métrologie unique au Canada. Il est notamment équipé d’un interféromètre laser et d’un banc de calibrage. Ces deux instruments sont normalement utilisés pour calibrer des mires, des rubans et des distancemètres, tel qu'illustré à la Figure 1.6.
Figure 1.6 : Interféromètre laser et banc de calibrage du Laboratoire de métrologie du Département des sciences géomatiques de l’Université Laval
Ce banc de calibrage d'une longueur totale de 35 mètres est presque parfaitement aligné. En théorie, seulement des dixièmes de millimètre d’erreur empêcheraient cette structure d’être parfaitement droite sur toute sa longueur. L’interféromètre permet d’effectuer des mesures de distance avec un haut degré de justesse et de fidélité sur ce banc de
calibrage. La résolution d’une mesure de distance avec cet instrument est de 1 micromètre (0,001 millimètre). Le banc de calibrage et l’interféromètre sont exploités afin d'assembler une infrastructure adaptée au calibrage des SLM en laboratoire.
L’hypothèse générale de ce travail de recherche est qu’il est possible d’utiliser des mesures interférométriques pour déterminer la position d’un SLM sur le banc de calibrage. La variation de la position du SLM sur le banc de calibrage peut permettre de simuler le déplacement du véhicule. Il devient donc possible de remplacer la trace du véhicule normalement déterminée par des mesures de positionnement GNSS par des mesures prises par l’interféromètre. De ce fait, étant donné la grande fidélité des mesures interférométriques (de l’ordre du micromètre), cette nouvelle méthode de calibrage est libre d'erreurs de positionnement. La justesse de l'interféromètre peut quant à elle être assurée par un étalonnage périodique.
Considérant que les angles de visée et les bras de levier sont propres à chaque instrument et qu'ils sont stables dans le temps, ces paramètres peuvent être déterminés et revérifiés périodiquement en laboratoire. Il ne devient donc plus nécessaire de les estimer à partir de collectes de données sur le terrain qui peuvent être très onéreuses considérant la mobilisation des équipements et du personnel.
1.4. Objectifs
Le développement de nouvelles méthodes de calibrage efficaces est un besoin réel dans la communauté des utilisateurs des SLM qui sont de plus en plus nombreux. Avec la miniaturisation des composantes de ces systèmes, on anticipe une multiplication des SLM sur le marché. Cette période en est encore à son début et en pleine émergence. Au cours des cinq dernières années, plusieurs drones aéroportés sont apparus sur le marché. Parmi ces drones, on retrouvait des modèles à ailes fixes et des modèles à hélices. Ces aéronefs sans pilote, communément appelé UAV (Unmanned Aerial Vehicule), étaient d'abord munis d'un récepteur GNSS et d'un capteur passif (caméra numérique). Il était au départ impensable de pouvoir installer un capteur LiDAR sur ces systèmes compte tenu de leur poids et de leurs dimensions. Grâce au progrès technologique récent, les scanners LiDAR peuvent maintenant être installés sur des multicoptères. La Figure 1.7 montre un nuage de points que peut livrer un UAV LiDAR de la marque Phoenix Aerial modèle AL3-16.
Figure 1.7 : Drone LiDAR AL3-16 de la marque Phoenix Aerial (Phoenix Aerial Systems, 2014)
Pour ce qui est des plateformes terrestres, il a été vu que les premiers SLM avaient été installés sur des véhicules tels des mini fourgonnettes et des camions. Les secteurs à mesurer ne sont toutefois pas toujours situés en bordure des chemins publics. Les utilisateurs ont donc voulu intégrer les SLM à des véhicules qui peuvent accéder à des endroits plus difficiles. Un groupe de chercheurs de l'Université du Québec à Rimouski (UQAR) a intégré les composantes d'un SLM à un véhicule tout terrain (VTT) dans le cadre de la collecte de données pour certains projets de recherche. L'utilisation d'un VTT, montré à la Figure 1.8, leur permet d'accéder aux zones côtières du fleuve Saint-Laurent pour mesurer les berges de façon à notamment quantifier les phénomènes d'érosion et de submersion.
Plusieurs utilisateurs, que ce soit dans un contexte de travail, de recherche ou même de loisir, ont recours à l'utilisation des SLM. Il est vrai que ces systèmes permettent d'effectuer la collecte de centaines de milliers de points en un temps très court. Les données recueillies peuvent être utilisées dans plusieurs champs d'application.
Les utilisateurs des SLM ont certainement une expertise dans leur domaine, mais ils ne sont pas tous aptes à juger de la justesse des données qu'ils recueillent. Il devient nécessaire de calibrer les systèmes de mesure de manière à ce que les données recueillies soient le plus près possible de la réalité. L'utilisation et l'interprétation d'un jeu de données de mauvaise qualité mèneront à des constats erronés. Le calibrage, qui fait partie d'une des branches de la métrologie, est un champ d'expertise à part entière. Ce travail de recherche permet d'implanter une nouvelle procédure de calibrage au sein des infrastructures existantes au Laboratoire de Métrologie de l'Université Laval de manière à développer une expertise à l'interne qui peut être utile aux divers utilisateurs des SLM (Larouche, 2016). Pour parvenir à estimer des valeurs pour les angles de visée et les bras de levier, une série de manipulations et de traitements est nécessaire. La plupart des étapes du traitement de données ont été automatisées par des programmes Matlab de manière à augmenter l'efficacité de la procédure. Le livrable final de ce travail de recherche est non seulement une description des grandes étapes menant à la réalisation de cette nouvelle méthode de calibrage en laboratoire, mais aussi une série de programmes qui permettent de la mettre en œuvre.
Le présent mémoire suit la chronologie de la réalisation de cette méthode de calibrage. Le Chapitre 2 traite des différentes méthodes de calibrage développées avec le temps, dont celles sur lesquelles la présente méthode de calibrage s'appuie. Le Chapitre 3 concerne la préparation du laboratoire et toutes les manipulations nécessaires pour recueillir des données LiDAR mobiles à l'intérieur alors que le Chapitre 4 présente les diverses étapes du traitement des données menant, entre autres, à l'assemblage des nuages de points LiDAR. Le Chapitre 5 jette les bases mathématiques de la nouvelle approche de calibrage et le Chapitre 6 présente les résultats du calibrage obtenus à partir de cette méthode. Une analyse plus approfondie des résultats et du travail en général est présentée au Chapitre 7. Finalement, le Chapitre 8 permet de faire un retour et une conclusion sur les éléments développés au cours de ce présent travail de recherche et propose quelques recommandations pour orienter la poursuite de la recherche dans cet axe.
Chapitre 2 : Revue de littérature
Le premier chapitre a permis d'introduire les SLM et la nature des différents capteurs qui les composent. Ces outils technologiques jouent un rôle de premier plan dans le domaine de la collecte de données géospatiales. La nécessité de connaître précisément la position et l'orientation relative entre les capteurs a fait l'objet de plusieurs travaux de recherche. Plusieurs méthodes de calibrage, plus ou moins rigoureuses, ont été développées avec le temps. Certaines méthodes fournissent de bons résultats, mais à ce jour, aucune méthode de calibrage n'est parfaite. Ce sujet de recherche est donc toujours pertinent et doit être approfondi. Le présent chapitre présentera plusieurs méthodes de calibrage qui ont permis de construire les bases de la nouvelle méthode de calibrage développée au cours de ce travail de maîtrise.
2.1. Les méthodes de calibrage non rigoureuses
Les premières méthodes de calibrage de données LiDAR ont été développées pour les véhicules aéroportés. Au courant des années 1990, le LiDAR aéroporté a gagné du terrain en termes de popularité pour l'acquisition de données d'élévation pour la production de modèles numériques de surface. Peu avant, la photogrammétrie aérienne, analytique ou numérique, était l'outil préconisé pour ce type d'applications. Le LiDAR offrait un avantage certain par rapport à la photogrammétrie étant donné qu'il permettait de pénétrer le couvert forestier pour atteindre la surface du sol (Vosselman and Maas, 2001). Il fut cependant rapidement remarqué que des erreurs systématiques se propageaient dans les coordonnées des points au sol et que le recouvrement des surfaces ne coïncidait pas (Kilian, Haala and Englich, 1993).
De façon à diminuer les écarts entre les nuages de points provenant de différentes lignes de vol ou de différents passages, certaines méthodes de calibrage ont été développées. Ces méthodes non rigoureuses permettent de diminuer l'impact des erreurs systématiques sans toutefois effectuer un calibrage du système. Ces méthodes sont dites non rigoureuses, car elles s'appuient sur les coordonnées des nuages de points au lieu de traiter les observations brutes provenant des différents capteurs. Le principe qui unit ces méthodes consiste à déterminer le vecteur de translation et la matrice de rotation à
appliquer aux coordonnées des points au sol qui permettent de minimiser l'écart entre les différents nuages de points qui se superposent.
Une des premières méthodes de calibrage développées pour le LiDAR aéroporté utilisait la notion de surfaces de liaison et de surfaces de contrôle (Kilian, Haala and Englich, 1993). Les surfaces de liaison correspondent aux surfaces planes perceptibles dans des nuages de points provenant de lignes de vol adjacentes alors que les surfaces de contrôle correspondent à des surfaces dont on connait la position dans un système de coordonnées planimétriques donné. Ces surfaces de contrôle peuvent correspondent à certains toits de bâtiments dont les quatre coins auraient été préalablement localisés avec un récepteur GNSS, par exemple. Les surfaces de liaison permettent donc de créer un lien entre les lignes de vol et la surface de contrôle permet de valider la position géodésique du modèle numérique de terrain. Cette méthode reprend plusieurs principes de l'aérotriangulation utilisée en photogrammétrie aérienne, telle que montrée à la Figure 2.1.
Figure 2.1 : Méthode d'ajustement proposée par Kilian, Haala et Englich (1993) Cette méthode d'ajustement du nuage de points LiDAR avec le recouvrement des lignes de vol et le rattachement au réseau géodésique avec des points de contrôle a été reprise par Pfeifer (2005) qui mettait l'emphase sur l'extraction automatique de surfaces planaires dans la zone de recouvrement. Selon une approche semblable, Bash (2000) utilisait des surfaces planes modélisées par deux lignes de vol pour déterminer une erreur verticale en plus d'une erreur d'alignement longitudinale et perpendiculaire à la ligne de vol. Une autre
approche par Vosselman et Maas (2001) cherchait à former deux grilles matricielles semblables en interpolant les nuages de points dans une zone de recouvrement pour ensuite déterminer une transformation de coordonnées qui permettraient de superposer les grilles en minimisant l'écart entre les points. Ces méthodes, quoique variante dans leur approche, ont la particularité d'être très semblables quant à leur finalité. Elles permettent de réduire l'impact des erreurs systématiques sur le nuage de points, sans toutefois chercher à modéliser les paramètres en cause. C'est pour cette raison qu'il faut ici parler d'ajustement au lieu de calibrage.
Il faut comprendre que les bras de levier et les angles de visée sont des concepts mécaniques qui interviennent dans le montage des capteurs. Les erreurs systématiques dans les nuages de points sont attribuées aux différences d'orientation et de position entre les différents capteurs qui composent les SLM. Dans l'optique de vouloir éliminer les erreurs systématiques, il faut correctement modéliser les paramètres en cause. Ces méthodes restent tout de même très populaires pour la principale raison qu'elles sont faciles à appliquer. Le fait de ne pas recourir aux observations brutes provenant du système GNSS, de l'IMU et du scanner LiDAR peut être certainement vu comme étant un avantage. Il s'agit pourtant d'une des raisons pour laquelle ces méthodes sont dites non rigoureuses.
D'autres faiblesses de ces méthodes sont liées à leur application. La sélection des points de contrôle entre les nuages de points demande beaucoup de temps de traitement pour l'opérateur lorsqu'elle n'est pas automatisée. Comme l'opérateur est grandement impliqué dans l'ajustement, la qualité de l'ajustement est totalement dépendante de la personne. Cela implique que les résultats sont non répétables et qu'ils seront donc différents d'un opérateur à l'autre. Cette approche étant manuelle et ardue, l’opérateur a tendance à travailler sur une ou quelques zones bien définies où il est plus simple d’apparier les nuages de points. Or, il arrive souvent que la solution pour l'ajustement fonctionne parfaitement dans cette zone, mais pas ailleurs. On est alors en présence d’un minimum local où l’erreur est minimisée qu’à cet endroit. Étant donné que l'on cherche à modéliser les paramètres de calibrage de façon précise et répétable, la procédure de calibrage développée dans le cadre de ce travail de maîtrise ne reprend pas les principes des méthodes d'ajustement non rigoureuses.
2.2. Les méthodes de calibrage semi-rigoureuses in situ
La présence des erreurs systématiques dans les nuages de points LiDAR et leur impact sur l'assemblage des lignes de vol ont été présentés à la dernière section. La plupart des méthodes de calibrage proposées précédemment mettent l'emphase sur l'ajustement des nuages de points sans toutefois s'intéresser à la cause des erreurs systématiques dans les données. Les SLM sont composés de plusieurs capteurs et le géoréférencement des nuages de points LiDAR nécessite une modélisation complexe de toutes les observations ainsi que de la position et de l'orientation relative entre ces capteurs. L'orientation relative entre l'IMU et le LiDAR est la source d'erreur qui a le plus grand impact sur le positionnement d'un point (Hebel and Stilla, 2012). Il est donc fortement recommandé de fixer solidement ces deux capteurs au montage de manière à ce que leur orientation relative ne change pas pendant leur utilisation. Pour toute installation subséquente, les angles de visée doivent être déterminés à nouveau, sauf dans un cas où l'IMU fait partie intégrante du scanner LiDAR comme il est assez courant avec les SLM terrestres. Au total, six groupes potentiels d'erreurs pourraient permettre d'expliquer la cause des biais systématiques dans les nuages de points selon Schenk (2001).
Liste des groupes potentiels d'erreurs 1. Les erreurs de portée du laser; 2. Les erreurs angulaires du laser;
3. Les erreurs liées au montage correspondant à l'orientation et à la position relative entre les capteurs;
4. Les erreurs liées aux mesures de l'IMU; 5. Les erreurs de positionnement GPS;
6. Les erreurs de synchronisation entre les capteurs.
Il est possible d'intégrer et de modéliser toutes les observations pour former l'équation de géoréférencement d'un point LiDAR, telle que présentée à l'Équation 2.1.
= + ∙ ( + ∙ ) (2.1)
où ∶ coordonnées d'un point LiDAR exprimées dans le système de coordonnées de projection;
: coordonnées du centre de l'IMU mesurées par le récepteur GNSS exprimées dans le système de coordonnées de projection;
: matrice de changement de repère formée par les observations angulaires de l'IMU pour passer du système de coordonnées de l'IMU au système de coordonnées de projection;
: bras de levier entre le LiDAR et l’IMU exprimés dans le système de coordonnées de l'IMU;
: matrice de changement de repère formée par les angles de visée entre le LiDAR et l'IMU exprimés dans le système de coordonnées de l'IMU; et
: coordonnées mesurées par le scanner LiDAR exprimées dans le système de coordonnées du LiDAR.
Dans cette équation, on tient compte du troisième groupe d'erreurs de Schenk (2001) en lien avec le montage puisque les bras de levier et les angles de visée y sont présents. Les bras de levier et les angles de visée peuvent être décomposés en deux parties, soient une partie déterminée par des mesurages manuels et une partie estimée à partir des observations faites sur le terrain. Il est plus facile de mesurer directement les composantes des bras de levier que celles des angles de visée. Contrairement à la position relative entre les capteurs, l'orientation relative ne peut pas être déterminée directement avec suffisamment de justesse (Hebel and Stilla, 2012). C'est pour cette raison que l'on doit utiliser l'équation de géoréférencement direct pour modéliser leur impact dans le nuage de points.
L'utilisation de surfaces planes, qu'elles soient naturelles ou artificielles, est un outil de choix pour l'estimation des angles de visée et des bras de levier directement à partir des observations au sol (Filin, 2001, 2003; Friess, 2006; Skaloud and Lichti, 2006). Les approches décrites dans ces travaux de recherche sont très similaires et impliquent toutes l'extraction de surfaces planes dans le nuage de points, la détermination du vecteur normal de chacun de ces plans et l'utilisation de ces vecteurs normaux pour déterminer les erreurs d'alignement et de positionnement relatif entre l'IMU et le LiDAR. L'approche préconisée par Skaloud et Litchi (2006) est celle qui est présentée en détail dans le cadre de ce travail.
Cette approche de calibrage est dite in situ puisqu'elle s'effectue directement à partir des observations sur le terrain. Cette méthode estime les angles de visée en utilisant des
surfaces planes communes décrites par des groupes de points. Ce type d'approche permet une estimation complète des paramètres de calibrage, c'est-à-dire que tous les paramètres sont estimés en même temps. Ceci est tout le contraire du patch-test en bathymétrie, par exemple, qui estime les angles de visée un à la fois (Seube, Levilly and De Jong, 2016). Cette méthode est toutefois qualifiée de semi-rigoureuse puisqu'elle est simplement basée sur l'ajustement de surfaces.
Cette méthode de calibrage nécessite l'utilisation de l'équation de géoréférencement d'un point LiDAR. Certains termes de l'Équation 2.1 doivent donc être développés plus explicitement. La matrice de changement de repère qui contient les angles de visée permet de faire la transition du système de référence du LiDAR au système de référence de l’IMU. Il est possible de décomposer cette matrice en deux matrices distinctes.
Une première matrice ∗ contient les angles a priori déterminés par le fabricant ou par l'utilisateur à partir de mesures mécaniques. Les angles sont normalement déterminés au degré près, ce qui permet de disposer de valeurs approchées suffisantes pour le calibrage du système.
Une deuxième matrice ∗ contient les angles de visée qui sont nécessairement de plus petites valeurs compte tenu de la qualité des valeurs approchées. Comme ces angles sont très petits, il est impossible de les déterminer par mesure directe. La meilleure façon de procéder se fait au moyen d'une détermination par moindres carrés à partir des observations, d'où l'utilisation d'une approche in situ. Étant donné que les angles sont très petits, on peut approximer la matrice ∗ de la façon suivante.
∗= #
1 −% &
% 1 −'
−& ' 1 ( (2.2)
où %, ' et & : angle de visée du lacet (%), du roulis (') et du tangage (&) (en radians). La dernière matrice ∗ contient donc les angles de visée à déterminer par calibrage. Le produit de ces deux matrices de changement de repère permet d'obtenir la matrice complète .
= ∗× ∗ (2.3) Le vecteur de l’Équation 2.1 contient les bras de levier entre le LiDAR et l’IMU. En réalité, il existe deux séries de bras de levier dans un SLM. Une première concerne les bras de levier entre le LiDAR et l'IMU et une deuxième les bras de levier entre l'IMU et l'antenne GNSS. Les bras de levier entre le centre de l’IMU et l’antenne GNSS sont plus faciles à modéliser par mesures mécaniques. Lors des calculs de post-traitement de la trace du véhicule, il est possible de déterminer les coordonnées tridimensionnelles de l’IMU à partir des observations GNSS et des bras de levier mesurés mécaniquement. Le vecteur des bras de levier entre l'antenne GNSS et le centre de l'IMU est habituellement exprimé dans le système de coordonnées du véhicule. Il représente donc une simple translation pour le rattachement géodésique du nuage de points. Puisqu’il est possible d’obtenir des valeurs justes pour ce vecteur, il n’apparaît pas directement dans l’équation de positionnement d’un point LiDAR.
En exprimant les bras de levier entre le LiDAR et l’IMU dans le système de référence de l'IMU, il est possible de déterminer leur position relative au repos avec des mesures prises à la station totale, par exemple. Cette façon de procéder permet de disposer de très bonnes valeurs approchées pour les bras de levier entre le LiDAR et l’IMU. Il est toutefois intéressant d'intégrer un vecteur supplémentaire de corrections à appliquer aux bras de levier qu'on peut déterminer par calibrage. La somme de ces deux vecteurs permet donc d'obtenir des valeurs corrigées pour les bras de levier telles que présentées à l’Équation 2.4. = ,+ ∗→ . / 0 1 2 = 3 / , 0, 1, 4 + 3 / ∗ 0∗ 1∗ 4 (2.4)
où /, 0 et 1 : valeurs corrigées des bras de levier entre l'IMU et le LiDAR;
/,, 0, et 1, : valeurs approchées des bras de levier entre l'IMU et le LiDAR; et
/∗, 0∗ et 1∗ : valeurs des corrections à apporter aux valeurs approchées des bras de levier entre l'IMU et le LiDAR.
Les paramètres à estimer par moindres carrés étant présentés, il est possible de se tourner vers les observations qui permettront de déterminer ces paramètres. Certaines méthodes non rigoureuses nécessitent la sélection de points communs dans les nuages de points. L'approche de Skaloud et Lichti (2006) est différente à cet égard puisqu'elle remplace les points pris individuellement par des surfaces planes sur lesquelles reposent ces points. Ces surfaces planes correspondent principalement aux toits des bâtiments présents sur la scène dans un contexte de relevé aéroporté. L'utilisation de plans ayant différentes orientations et inclinaisons permet d'optimiser la qualité du calibrage.
Il a été discuté qu'il est difficile de sélectionner des points communs dans des nuages de points différents. L'exercice se simplifie lorsqu'il est question d'identifier des plans représentant une même surface plane provenant de lignes de vol ou de passages différents. Il est possible de paramétrer un plan avec l'équation suivante.
5667 = 89: 9; 9< 9=>? (2.5)
où 9:, 9; et 9< : valeur des cosinus directeurs du vecteur normal à un plan; et 9= : distance orthogonale entre le plan et l'origine du système de coordonnées.
Pour chaque surface planaire extraite du nuage de points, tous les points appartenant à cette surface, dont les coordonnées peuvent être exprimées par @, A et B, devraient respecter l’Équation 2.6.
9:@ + 9;A + 9<B + 9== 0 (2.6) Les paramètres (9:, 9;, 9< et 9=) de chaque plan présent dans le nuage de points sont déterminés par moindres carrés lors de la compensation. En raison de la présence des erreurs aléatoires, les points qui forment la surface plane ne sont pas parfaitement situés sur le plan. Il est possible de calculer la distance orthogonale d'un point par rapport à un plan, soit la résiduelle après la compensation, à partir de l’Équation 2.7.
Il est ensuite possible de vérifier si la valeur de la résiduelle de chaque point demeure à l'intérieur d'une certaine tolérance qui peut être de 2 centimètres, par exemple. Si certains points ne respectent pas ce critère, on peut les éliminer de la compensation et ré-estimer les paramètres du plan à partir des observations restantes. De cette façon, par itérations successives, il est possible de déterminer l'équation d'un plan avec le moins de bruit possible sur les points qui le composent.
L'approche de Skaloud et Lichti (2006) consiste à déterminer les valeurs optimales pour les angles de visée qui forment la matrice qui vont permettre d'aligner le mieux possible les vecteurs normaux entre les plans provenant des différents nuages de points. Cette approche converge normalement en 3 ou 4 itérations successives, dépendamment de l’éloignement des valeurs a priori par rapport aux valeurs estimées. Cette approche ne cherche toutefois pas à déterminer les valeurs optimales pour les bras de levier qui forment le vecteur puisqu'elle considère que les bras de levier sont préalablement déterminés par une approche indépendante.
Cette méthode est donc relativement performante en termes de temps de traitement. La qualité des observations et des valeurs approchées pour les paramètres permet une convergence en quelques itérations seulement. Aussi, des progrès en termes d'efficacité pour l'extraction des plans ont permis de diminuer massivement le temps de traitement pour l'opérateur. Une méthode a été développée en 2007 pour extraire automatiquement des groupes de points appartenant à un même plan (Skaloud and Schaer, 2007).
Un avantage important de l'utilisation de cette méthode est lié à l'utilisation des moindres carrés pour l'estimation des paramètres. Une approche par moindres carrés permet non seulement d'estimer des valeurs pour les paramètres, mais permet aussi d'évaluer leur incertitude par l'estimation de leur écart-type. Il est donc possible d'anticiper l'impact des erreurs aléatoires des observations sur l'incertitude des paramètres estimés.
Ce type de méthodes de calibrage semi-rigoureuses a été initialement développé pour les plateformes aéroportées. Elle a par la suite été adaptée aux véhicules terrestres (Rieger et al., 2010). Le cadre mathématique est sensiblement le même. L'application de la méthode diverge légèrement en ce sens que les toits sont peu ou pas visibles à partir d'un véhicule terrestre. Les surfaces planes utilisées correspondent normalement aux façades des bâtiments en échange des toits. Au lieu d'extraire des plans communs observés par deux