Introduction à la théorie des groupes et de leurs représentations
110
0
0
Texte intégral
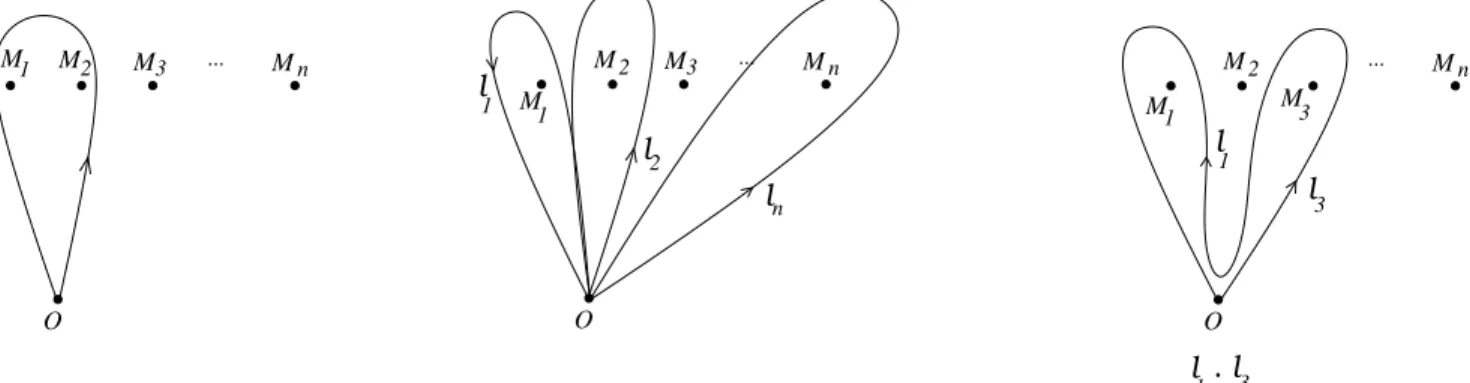
Figure

Documents relatifs