Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS École nationale supérieure d'ingénieurs (Poitiers)
Laboratoire d'informatique et d'automatique pour les systèmes (LIAS) - Poitiers (Diplôme National - Arrêté du 7 août 2006)
École doctorale : Sciences et ingénierie pour l'information, mathématiques - S2IM Secteur de recherche : Automatique
Présentée par : Benoît Huard
Contribution à la modélisation non-linéaire et à la commande d'un actionneur robotique intégré pour la manipulation
Directeur(s) de Thèse :
Thierry Poinot, Sandrine Moreau, Mathieu Grossard Soutenue le 07 juin 2013 devant le jury Jury :
Président Mohammed M'Saad Professeur des Universités, ENSICAEN
Rapporteur Edouard Laroche Professeur des Universités, Université de Strasbourg
Rapporteur Christine Prelle Professeur des Universités, Université de Technologie de Compiègne Membre Thierry Poinot Professeur des Universités, Université de Poitiers
Membre Sandrine Moreau Maître de conférences, Université de Poitiers Membre Mathieu Grossard Docteur-Ingénieur, CEA-LIST
Membre Mohammed M'Saad Professeur des Universités, ENSICAEN
Membre Olivier Bachelier Professeur des Universités, Université de Poitiers
Pour citer cette thèse :
Benoît Huard. Contribution à la modélisation non-linéaire et à la commande d'un actionneur robotique intégré pour
la manipulation [En ligne]. Thèse Automatique. Poitiers : Université de Poitiers, 2013. Disponible sur Internet
THESE
Pr´esent´ee `a
L’UNIVERSITE DE POITIERS Pour l’obtention du grade de
DOCTEUR DE L’UNIVERSITE DE POITIERS
ECOLE NATIONALE SUPERIEURE D’INGENIEURS DE POITIERS ECOLE DOCTORALE SCIENCES ET INGENIERIE POUR L’INFORMATION
Diplˆome National - Arrˆet´e du 7 aoˆut 2006 SPECIALITE : AUTOMATIQUE
Pr´esent´ee par
Benoˆıt HUARD
Contribution `
a la mod´
elisation non-lin´
eaire et `
a la
commande d’un actionneur robotique int´
egr´
e pour la
manipulation
Directeur de Th`ese : T. POINOT
Co-encadrement : S. MOREAU, M. GROSSARD Pr´esent´ee et soutenue publiquement le 7 juin 2013
COMPOSITION DU JURY
Rapporteurs : M. E. LAROCHE Professeur, Universit´e de Strasbourg
Mme. C. PRELLE Professeur, Universit´e de Technologie de Compi`egne Examinateurs : M. O. BACHELIER Professeur, Universit´e de Poitiers
M. M. GROSSARD Docteur-Ing´enieur, CEA-LIST
Mme. S. MOREAU Maˆıtre de Conf´erences, Universit´e de Poitiers M. M. M’SAAD Professeur, ENSICAEN
Remerciements
Les travaux pr´esent´es dans ce m´emoire de th`ese ont ´et´e effectu´es en collaboration entre le Laboratoire d’Informatique et d’Automatique pour les Syst`emes (LIAS) de l’Universit´e de Poitiers et le Laboratoire de Robotique Interactive (LRI) du CEA-LIST `a Fontenay-aux-Roses.
Je souhaite commencer par remercier mon directeur de th`ese Thierry Poinot, Profes-seur `a l’Universit´e de Poitiers. Un grand merci pour la libert´e qu’il m’a laiss´e dans la conduite de ces travaux et pour sa bonne humeur constante.
Je remercie sinc`erement Sandrine Moreau, Maitre de conf´erence `a l’Universit´e de Poi-tiers, pour son encadrement, ses conseils et sa disponibilit´e constante pour r´epondre `a mes questions diverses et vari´ees.
Je remercie ´egalement Mathieu Grossard, Docteur-Ing´enieur au CEA, d’avoir accept´e de m’encadrer au CEA. Ses conseils, son exp´erience, ses comp´etences et ses connaissances m’ont beaucoup apport´e au cours de la th`ese.
J’exprime ma profonde gratitude `a Monsieur Mohammed M’Saad, Professeur `a l’EN-SICAEN, d’avoir accept´e de faire partie de mon jury de th`ese et de m’avoir fait l’honneur de le pr´esider.
J’adresse toute ma reconnaissance `a Monsieur Edouard Laroche, Professeur `a l’Uni-versit´e de Strasbourg, d’avoir accept´e d’ˆetre rapporteur de ce travail et ´egalement pour sa lecture minutieuse, ses remarques et suggestions pertinentes ainsi que pour le riche ´echange que nous avons pu avoir au t´el´ephone.
Je tiens `a exprimer ma reconnaissance `a Madame Christine Prelle, Professeur `a l’Uni-versit´e de Technologie de Compi`egne, pour son acceptation d’ˆetre rapporteur sur mes travaux, je la remercie vivement pour sa lecture approfondie et ses remarques enrichis-santes et constructives.
Je ne peux manquer de remercier Olivier Bachelier, Professeur `a l’Universit´e de Poi-tiers, d’avoir fait partie de mon jury de th`ese en examinant mes travaux. J’ai beaucoup appr´eci´e ses bons conseils donn´es `a des moments importants de ma th`ese et nos diverses discussions.
Un grand merci aux coll`egues du CEA qui m’ont accompagn´e de mani`ere profession-nelle et/ou amicale. Je souhaite citer Mathieu et Javier avec qui j’ai r´edig´e mes premi`eres publications, les th´esards et stagiaires du laboratoire pour les bons moments pass´es et je d´ecerne une mention sp´eciale pour Marc qui n’a jamais pu m’encadrer et Benoˆıt pour les discussions et les id´ees d’un niveau de r´eflexion ´elev´ee.
Enfin je voulais remercier toute ma famille et mes amis pour leurs encouragements et leur soutient, mˆeme si au final, c’est moi qui ai soutenu.
Je crois, docteur, que l’homme de N´eanderthal est en train de nous le mettre dans l’os. Deux intellectuels assis vont moins loin qu’une brute qui marche. Michel Audiard.
Table des mati`
eres
Introduction g´en´erale 1
Chapitre 1 Conception et commande de pr´ehenseurs robotiques dextres 5
1.1 Introduction . . . 6
1.2 La manipulation en robotique . . . 6
1.2.1 Pr´ehenseur robotique . . . 6
1.2.2 Notion de manipulation dextre . . . 8
1.2.3 Anthropomorphisme . . . 8
1.2.4 Exemples de manipulateurs robotiques . . . 9
1.3 Technologies d’actionnement ´electriques pour la conception de pr´ehenseurs robotiques dextres . . . 9
1.3.1 Les actionneurs `a double-effet . . . 10
1.3.2 Les actionneurs simple-effet . . . 12
1.3.3 Contraintes d’int´egration pour la conception d’un manipulateur an-thropomorphe et dextre . . . 14
1.4 Commande de pr´ehenseurs robotiques . . . 16
1.4.1 Introduction . . . 16
1.4.2 Commande en force indirecte . . . 17
1.4.2.1 Commande en compliance passive . . . 17
1.4.2.2 Commande par retour d’effort implicite . . . 17
1.4.2.3 Commande par retour d’effort explicite . . . 18
1.4.3 Commande en force directe . . . 19
1.4.3.1 Commande en force explicite . . . 19
1.4.3.2 Commande par raideur active avec retour d’effort . . . 19
1.4.3.3 Commande hybride . . . 20
1.4.3.4 Commande hybride externe . . . 20
1.6 Conclusion . . . 24
Chapitre 2 Mod´elisation et identification de l’actionneur m´ecatronique 25 2.1 Introduction . . . 26
2.2 G´en´eralit´es . . . 26
2.3 Ecriture du mod`ele dynamique d’un actionneur `a simple-effet . . . 27
2.3.1 Mod`ele dynamique g´en´eral d’un robot . . . 27
2.3.2 Couplage cin´ematique . . . 28
2.3.3 Ecriture de l’´evolution dynamique d’un doigt . . . 28
2.3.4 Mise en application sur le dispositif ´etudi´e . . . 29
2.3.4.1 Pr´esentation de l’actionneur . . . 29
2.3.4.2 Mod´elisation de l’actionneur r´eversible `a ressort de rappel 32 2.3.5 Discussions . . . 34
2.3.5.1 Pr´etension des tendons . . . 34
2.3.5.2 R´egulation du moteur `a courant continu . . . 34
2.3.5.3 Mod`ele du frottement . . . 35
2.4 Identification de l’actionneur `a simple-effet . . . 38
2.4.1 Techniques d’identification . . . 38
2.4.2 El´ements th´eoriques de la m´ethode d’identification par mod`ele inverse 39 2.4.3 Identification de syst`emes LPV . . . 42
2.4.3.1 Les m´ethodes d’identification globales . . . 43
2.4.3.2 Les m´ethodes d’identification locales . . . 44
2.4.4 R´esultats et discussions . . . 45
2.4.4.1 Application de la m´ethode d’identification par mod`ele in-verse sur la partie m´ecanique de l’actionneur . . . 45
2.4.4.2 R´esultats exp´erimentaux . . . 45
2.4.4.3 Identification par approche LPV . . . 49
2.4.4.4 Discussion sur les r´esultats exp´erimentaux . . . 51
2.4.5 Identification de la partie ´electrique . . . 53
2.5 Repr´esentation d’´etat de l’actionneur `a simple effet . . . 54
2.6 Conclusion . . . 57
Chapitre 3 Approche proprioceptive pour l’observation d’´etat par multi-mod`eles 59 3.1 Introduction . . . 60
3.2 Motivations pour le choix d’une approche multimod`eles . . . 60
3.3 Mod`eles de syst`emes par une approche multimod`eles . . . 61
3.3.1 Structures multimod`eles . . . 62
3.3.1.1 Multimod`eles `a ´etats d´ecoupl´es . . . 62
3.3.1.2 Multimod`eles `a ´etats coupl´es . . . 63
3.3.2 M´ethode de passage d’un syst`eme non-lin´eaire en multimod`eles . . 64
3.4 Estimation d’´etat par une repr´esentation multimod`eles . . . 67
3.4.1 Contexte et objectifs . . . 67
3.4.2 Synth`ese d’observateur bas´ee sur la structure multimod`eles . . . 68
3.4.2.1 Robustesse en stabilit´e, cas des fonctions de pond´eration non mesurables . . . 69
3.4.2.2 Robustesse en performance, placement de pˆoles dans le plan complexe . . . 71
3.5 Application exp´erimentale sur l’articulation m´ecatronique . . . 73
3.5.1 Reformulation du mod`ele non-lin´eaire en multimod`eles . . . 73
3.5.2 Synth`ese d’observateur et r´esultats en simulation . . . 76
3.5.3 R´esultats exp´erimentaux . . . 80
3.6 Conclusion . . . 86
Chapitre 4 Commande hybride externe force-position du syst`eme m´ ecatro-nique 87 4.1 Introduction . . . 88
4.2 Introduction `a la commande hybride externe . . . 88
4.2.1 Commande en force directe et indirecte pour un robot un axe . . . 88
4.2.2 Strat´egie de synth`ese des lois de commande . . . 89
4.3 Synth`ese d’une loi de commande en position : commande par retour d’´etat 90 4.3.1 G´en´eralit´es sur la commande par retour d’´etat . . . 90
4.3.2 Extension du retour d’´etat au cas multimod`ele . . . 92
4.3.3 Synth`ese d’une loi de commande et choix de la dynamique de r´egu-lation . . . 94 4.3.4 Placement de pˆoles . . . 94 4.3.5 Marges de stabilit´e . . . 94 4.3.6 Application . . . 95 4.3.6.1 Synth`ese du correcteur . . . 95 4.3.6.2 Validation en simulation . . . 97
4.3.6.3 Essais exp´erimentaux . . . 99
4.4 Commande par retour de sortie : synth`ese d’une loi de commande en force 102 4.4.1 Pr´esentation du mod`ele de commande . . . 102
4.4.1.1 Prise en consid´eration de la force cr´e´ee par l’objet . . . 102
4.4.1.2 Incertitudes sur le syst`eme nominal . . . 104
4.4.1.3 Retard de mesure li´e `a l’observateur . . . 105
4.4.2 Commande par retour de sortie, synth`ese H∞ . . . 105
4.4.2.1 Stabilit´e par rapport aux incertitudes . . . 105
4.4.2.2 Syst`eme standard et synth`ese H∞ . . . 106
4.4.2.3 Mise en application par ajout de filtres de pond´eration fr´equentiels . . . 107
4.4.3 Choix des filtres de pond´eration, synth`ese du correcteur . . . 109
4.4.3.1 Choix de W1(s) . . . 109 4.4.3.2 Choix de W2(s) . . . 109 4.4.3.3 Synth`ese du correcteur . . . 110 4.4.4 Application . . . 112 4.4.4.1 Validation en simulation . . . 112 4.4.4.2 Essais exp´erimentaux . . . 113 4.5 Conclusion . . . 118
Chapitre 5 Conclusion et perspectives 121
Bibliographie 125
Table des figures
1.1 Les deux modes de pr´ehension d’objet [1] . . . 7
1.2 Quelques manipulateurs robotiques : la main Okada (a)), la main Stanford (b)), la main Utah (c)), la main Shadow (d)) . . . 10
1.3 Deux exemples d’actionneurs ´electriques `a double-effet . . . 11
1.4 Actionneur ´electrique `a double-effet avec tendon d´eformable . . . 12
1.5 Les deux principaux types d’actionneurs ´electriques `a simple-effet . . . 13
1.6 Pr´esentation sch´ematique des contraintes de conception d’un pr´ehenseur robotique multidigital pour la manipulation dextre . . . 14
1.7 Repr´esentation sch´ematique de la commande d’un pr´ehenseur . . . 17
1.8 Principe de la commande par raideur active sans retour d’effort . . . 18
1.9 Principe de la commande par retour d’effort explicite . . . 18
1.10 Principe de la commande en force explicite . . . 19
1.11 Principe de la commande par raideur active avec retour d’effort . . . 19
1.12 Principe de la commande hybride . . . 20
1.13 Principe de la commande hybride externe . . . 20
1.14 Main HANDLE compos´ee des 23 degr´es de libert´e [23] . . . 21
1.15 Dispositif exp´erimental dans le contexte articulaire . . . 22
1.16 Sch´ema g´en´eral de la strat´egie de commande bas niveau abord´ee au cours du m´emoire . . . 23
2.1 Vue sch´ematique du dispositif exp´erimental . . . 30
2.2 Sch´ema d’une vis et r´eversibilit´e . . . 30
2.3 Sch´ema de principe de fonctionnement du dispositif exp´erimental . . . 31
2.4 Sch´ematisation d’un actionneur `a tendons ´elastiques . . . 32
2.5 R´egulation d’un moteur `a courant continu en cascade . . . 34
2.6 Sch´ema bloc avec r´egulation de courant instantan´ee . . . 35
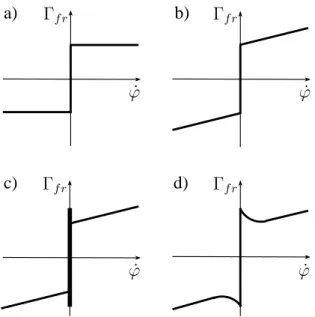
2.7 Mod`eles de frottement d´ependant de la vitesse angulaire. a) Frottement sec (ou frottement de Coulomb), b) Frottement sec et visqueux, c) Frottement sec d’adh´erance, d) Mod`ele de Stribeck . . . 36
2.8 Choix du mod`ele de frottement. Trac´es pour diff´erentes positions articu-laires ϕ pour montrer la non d´ependance `a la charge. . . 37
2.9 M´ethode d’identification par mod`ele inverse et moindres carr´es lin´eaires . . 40
2.10 Repr´esentation LFR . . . 43
2.11 Identification exp´erimentale par mod`ele inverse . . . 46
2.13 Validation du mod`ele identifi´e par une excitation al´eatoire en amplitude et
en fr´equence . . . 48
2.14 Evolutions param´etriques pour diff´erents points de fonctionnement . . . 51
2.15 Validation du mod`ele LPV identifi´e. Comparaison avec l’identification par mod`ele inverse. . . 52
2.16 Sch´ematisation de l’application d’une force sur l’articulation . . . 54
2.17 Validation du mod`ele m´ecatronique . . . 56
2.18 Sch´ema g´en´eral de la strat´egie de commande bas niveau abord´ee au cours du m´emoire . . . 57
3.1 Multimod`ele `a ´etats d´ecoupl´es . . . 62
3.2 Multimod`eles `a ´etats coupl´es . . . 63
3.3 Principe d’un observateur . . . 68
3.4 Exemples de r´egions LMI usuelles : cˆone centr´e `a l’origine (`a gauche) et disque centr´e sur l’axe r´eel (`a droite). . . 72
3.5 Exemple de r´egion LMI : intersection de trois r´egions LMI . . . 72
3.6 R´eponses `a un ´echelon du mod`ele non-lin´eaire et du multimod`eles . . . 76
3.7 Fonctions de pond´eration du multimod`eles . . . 77
3.8 Placement de pˆoles dans la D-r´egion. Les pˆoles de la boucle ouverte sont repr´esent´es par des (o), ceux de l’observateur par des +. . . 78
3.9 Positions et vitesses observ´ees en simulation . . . 79
3.10 Force observ´ee en simulation . . . 80
3.11 Positions et vitesses exp´erimentales observ´ees . . . 81
3.12 Fonctions de pond´eration exp´erimentales . . . 82
3.13 Validation de la force observ´ee avec un capteur ext´eroceptif . . . 83
3.14 Comparaison de la force estim´ee avec une mesure ext´eroceptive pour trois positions articulaires : autour de 20◦ en haut, de 40◦ au milieu et de 60◦ en bas. . . 83
3.15 Illustration des deux cas de contacts possibles. A gauche, cas I : l’objet est fixe et l’articulation vient `a sa rencontre. A droite, cas II : l’articulation est fixe et l’objet est en mouvement. . . 84
3.16 D´etection de collision en d´eplacement et en statique . . . 85
3.17 Sch´ema g´en´eral de la strat´egie de commande bas niveau abord´ee au cours du m´emoire . . . 86
4.1 Commande par retour d’effort explicite . . . 88
4.2 Commande hybride externe force/position. LCP d´esigne la Loi de Com-mande en Position, rs permet la commutation de l’interrupteur selon (3.47) 89 4.3 Commande par retour d’´etat . . . 91
4.4 Commande par retour d’´etat avec int´egrateur . . . 92
4.5 Sch´ema bloc du syst`eme en boucle ferm´ee incluant l’observateur et la com-mande par retour d’´etat . . . 93
4.6 Sch´ema bloc du syst`eme en boucle ferm´ee incluant l’observateur et la com-mande par retour d’´etat . . . 95
4.7 Placement des pˆoles de l’observateur et de la commande `a l’int´erieur des D-R´egions. Les pˆoles du syst`eme en boucle ouverte sont repr´esent´es par des o. Les pˆoles de l’observateur sont repr´esent´es par des signes +, ceux de la commande par des ⋆ (except´es ceux de l’int´egrateur qui ne sont pas
trac´es). . . 96
4.8 R´eponse `a un ´echelon de position puis de force en simulation pour le syst`eme command´e par un retour d’´etat avec int´egrateur . . . 98
4.9 Diff´erence entre les fonctions de pond´eration mesur´ees et estim´ees . . . 99
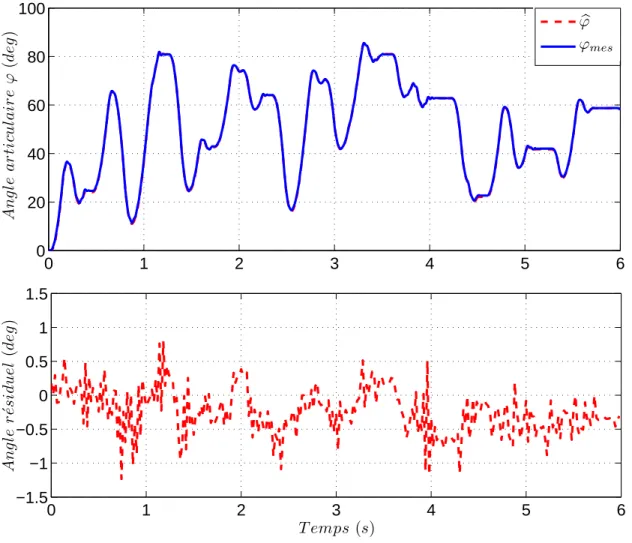
4.10 Commande en position articulaire en r´eponse `a une excitation compos´ee d’´echelons et de rampes. Comparaison entre la position mesur´ee ϕ et esti-m´ee bϕ. . . 100
4.11 Application d’une force ext´erieure sur l’articulation en boucle ouverte (en haut) et en boucle ferm´ee (en bas). La commande θc est r´eadapt´ee `a l’´echelle101 4.12 Sch´ema g´en´eral de la strat´egie de commande hybride externe . . . 102
4.13 Illustration du contact avec un objet. A gauche, la phalange est juste en contact avec l’objet et `a droite, elle applique une force sur l’objet. . . 103
4.14 Sch´ema du mod`ele de commande . . . 103
4.15 Incertitude additive directe . . . 105
4.16 Syst`eme boucl´e avec incertitudes additives directes . . . 106
4.17 Connexion de M(s) et ∆(s) . . . 106
4.18 Syst`eme standard pour la synth`ese H∞ . . . 107
4.19 Sch´ema de synth`ese `a deux blocs . . . 107
4.20 Majoration du faisceau de transferts fr´equentiels par un filtre W2(s) . . . . 109
4.21 Repr´esentation du correcteur synth´etis´e et du correcteur r´eduit sous forme de diagramme de Bode. . . 110
4.22 Fonctions de pond´eration utilis´ees dans la synth`ese du correcteur et trans-ferts caract´eristiques . . . 111
4.23 V´erification de la majoration du faisceau de courbe par rapport au transfert K(s)S(s) . . . 111
4.24 Commande hybride externe en simulation avec un objet fictif de raideur kobj = 500 N.m−1. Lors de la phase I, le m´ecanisme est command´e en position. La commande en force est prioritaire pendant la phase II. . . 112
4.25 Commande hybride externe en simulation avec un objet fictif de raideur kobj = 700 N.m−1. Lors de la phase I, le m´ecanisme est command´e en position. La commande en force est prioritaire pendant la phase II. . . 113
4.26 Objets manipul´es lors des essais exp´erimentaux. En haut `a gauche, l’objet rigide, en haut `a droite l’objet souple. En bas : impact de l’articulation sur un des objets. . . 114
4.27 Sch´ematisation de l’application exp´erimentale de la commande hybride ex-terne . . . 115
4.28 Commande hybride externe exp´erimentale avec un objet de faible raideur. Objet positionn´e vers ϕobj = 16◦. . . 115
4.29 Commande hybride externe exp´erimentale avec un objet de faible raideur. Objet positionn´e vers ϕobj = 30◦. . . 116
4.30 Commande hybride externe exp´erimentale avec un objet de forte raideur. Objet positionn´e vers ϕobj = 18◦. . . 117
4.31 Commande hybride externe exp´erimentale avec un objet de forte raideur. Objet positionn´e vers ϕobj = 50◦. . . 118
Liste des tableaux
2.1 Param`etres caract´eristiques du syst`eme m´ecatronique . . . 33
2.2 Valeurs identifi´ees pour le vecteur Λ . . . 47
2.3 D´etermination des param`etres physiques . . . 48
La r´ealisation de tˆaches de manipulation dextres par des pr´ehenseurs robotiques re-quiert aussi bien une conception m´ecanique avanc´ee qu’une implantation de lois de com-mande performantes. Les technologies m´ecaniques con¸cues pour de telles tˆaches tendent `a limiter les jeux et les frottements tout en optimisant l’int´egration fonctionnelle des dif-f´erents composants. La commande de ces m´ecanismes se doit de leur affecter une extrˆeme pr´ecision dans leur positionnement ainsi que dans l’application des efforts de pr´ehension. Le Laboratoire de Robotique Interactive du CEA − LIST de F ontenay aux Roses m`ene des travaux de recherche dans le domaine de la conception de mains poly-articul´ees depuis quelques ann´ees. Ces travaux s’orientent notamment sur l’apport de m´ecanismes r´e-versibles dans la conception de pr´ehenseurs robotiques. La r´eversibilit´e m´ecanique permet de r´eduire le nombre de capteurs, en apportant des informations au niveau proprioceptif sur le comportement des ´el´ements terminaux. Le d´eveloppement de ces mains n´ecessite alors l’apport d’outils d’automatique avanc´es pour la synth`ese d’une commande duale entre la maˆıtrise des efforts appliqu´es sur les objets manipul´es et les d´eplacements du
m´eca-nisme dans l’espace de fonctionnement. Un partenariat entre le Laboratoire de Robotique Interactive et le Laboratoire d’Informatique et d’Automatique pour les Syst`emes de l’Universit´e de
Poitiers est mis en place pour r´ealiser la commande de ce type de m´ecanisme `a l’aide d’outils d’automatique avanc´es.
La commande dextre d’un pr´ehenseur exige de caract´eriser avec pr´ecision le comporte-ment de tous les ´el´ecomporte-ments du m´ecanisme pour chacune des configurations possibles d’une part et de parvenir `a une manipulation performante de diff´erents objets d’autre part. Ce-pendant, la commande simultan´ee des nombreux degr´es de libert´e d’un tel pr´ehenseur est complexe. Une solution possible consiste `a traiter ces aspects de mani`ere simplifi´ee sur un doigt ou directement au niveau articulaire afin de pouvoir ensuite les ´etendre sur un syst`eme poly-articul´e. Le travail r´ealis´e au cours de cette th`ese se situe dans le contexte ar-ticulaire avec un objectif de synth`ese d’une commande avanc´ee adapt´ee `a la manipulation d’objets diff´erents.
Ces travaux s’orientent en trois grands axes de recherche :
– la mod´elisation et l’identification param´etrique non-lin´eaire de ces syst`emes robo-tiques ;
– la synth`ese d’observateurs pour estimer les grandeurs n´ecessaires `a la commande sans capteurs exteroceptifs ;
– la synth`ese de lois de commande pour la manipulation.
Les chapitres constituant cette th`ese pr´esentent les ´etapes successives suivies pour r´ea-liser une commande adapt´ee `a la manipulation appliqu´ee au contexte articulaire. A notre connaissance, l’ensemble des m´ethodes employ´ees dans ce m´emoire pour la r´ealisation de cette commande, n’a encore jamais ´et´e d´evelopp´e pour une telle application.
Un syst`eme exp´erimental correspondant `a une articulation de la main poly-articul´ee est utilis´ee pour valider les ´el´ements th´eoriques introduits lors des cinq chapitres de ce m´emoire. Celui-ci peut ˆetre consid´er´e comme un syst`eme m´ecatronique dans le sens o`u il est issu d’une optimisation des ´el´ements ´electroniques et m´ecaniques pilot´es par des lois de commande provenant de l’automatique.
Le premier chapitre d´ecrit le sch´ema g´en´eral de conception de pr´ehenseurs poly-articul´es, en tenant compte de contraintes d’anthropomorphisme, de dext´erit´e et d’in-t´egration fonctionnelle. Une pr´esentation des sch´emas de commande robotique pour la manipulation est ´egalement effectu´ee afin de situer le contexte d’´etude dans le cadre arti-culaire.
Le deuxi`eme chapitre pr´esente la mod´elisation et l’identification non-lin´eaire du sys-t`eme ´etudi´e. Une description de son fonctionnement est pr´esent´ee avec une mod´elisation th´eorique. Cette derni`ere ´etant non-lin´eaire, des techniques d’identification adapt´ees sont propos´ees avant d’ˆetre appliqu´ees exp´erimentalement.
Le troisi`eme chapitre a pour but la reconstruction, par le biais d’un observateur, des grandeurs terminales du syst`eme m´ecatronique, `a savoir sa position et les efforts s’y appli-quant. L’estimation de ces informations dites ext´eroceptives se fait `a partir des mesures proprioceptives au niveau de l’actionneur et de la connaissance du mod`ele. Ce dernier ´etant non-lin´eaire, il est reformul´e en une repr´esentation d’´etat multimod`eles. Cette for-mulation permet d’inclure directement les non-lin´earit´es dans l’estimation des variables terminales et ainsi de conserver avantageusement la mod´elisation pr´esent´ee au chapitre pr´ec´edent.
L’objectif du quatri`eme chapitre est de r´ealiser une commande adapt´ee `a la manipu-lation d’objets. Une approche par commande hybride externe est propos´ee. Sa synth`ese se d´eroule en deux ´etapes : une loi de commande en position dans l’espace de fonction-nement, puis une loi de commande en effort permettant d’asservir les forces souhait´ees sur les objets `a manipuler. Des contraintes de robustesse sont prises en consid´eration par rapport `a la vari´et´e des objets `a saisir, selon qu’ils sont rigides ou non.
Dans la conclusion sont ´evoqu´ees des am´eliorations possibles des techniques d´evelop-p´ees pour la commande de l’articulation. Les r´esultats obtenus exp´erimentalement pour le syst`eme `a un degr´e de libert´e ouvrent de nombreuses perspectives en vue de la commande de pr´ehenseurs dextres `a plusieurs degr´es de libert´e.
Chapitre 1
Conception et commande de
1.1
Introduction
La manipulation par des robots est loin de trouver des solutions universelles tant les objets `a manipuler peuvent avoir des formes, des masses, des tailles, des fragilit´es dif-f´erentes. Les robots manipulateurs prennent alors des formes tr`es vari´ees : humano¨ıdes, orth`eses de bras, mains, bras industriels... Leurs formes et leurs propri´et´es sont adap-t´ees dans le but d’accomplir principalement deux types de tˆaches. Certaines d´echargent l’homme dans des op´erations fastidieuses, r´ep´etitives. D’autres requi`erent une pr´ecision et/ou une dext´erit´e importante afin d’ex´ecuter des tˆaches de manipulation avanc´ees. Dans ce cas, la conception des robots va ˆetre envisag´ee en fonction des objets `a manipuler et de la finesse avec laquelle ils seront mani´es, tout en tenant compte de l’environnement dans lequel ils op`erent.
Ces objectifs ont permis l’´elaboration de pr´ehenseurs robotiques complexes capables de surpasser, dans leur adaptabilit´e `a la tˆache, les performances des premiers m´ecanismes de pince `a un degr´e de libert´e (ouverture, fermeture). La fonction de manipulation dextre est l’une des fonctions les plus complexes `a r´ealiser par un syst`eme robotique. Elle sup-pose comme pr´e requis, l’utilisation de syst`emes m´ecaniques performants et pr´ecis, qui soient capables de s’affranchir de certaines limitations li´ees aux ph´enom`enes non d´esir´es de frottements, d’hyst´er´esis ou de vibrations m´ecaniques. La conception de pr´ehenseurs ro-botiques dextres n´ecessite alors de maˆıtriser ces ph´enom`enes contraignants. Un panorama g´en´eral est pr´esent´e dans ce chapitre.
1.2
La manipulation en robotique
1.2.1
Pr´
ehenseur robotique
La pr´ehension robotique d´esigne la capacit´e du syst`eme robotique `a saisir des objets. Le pr´ehenseur d´esigne, quant `a lui, le dispositif d’interaction fix´e `a l’extr´emit´e mobile de la structure m´ecanique. Il peut ˆetre issu de technologies diverses (pr´ehenseurs m´ecaniques, magn´etiques, `a d´epression, ...) et prendre des formes vari´ees selon la nature, la complexit´e et l’´echelle dimensionnelle de la tˆache robotique `a ex´ecuter.
Assurer la pr´ehension et ses nuances `a partir d’organes effecteurs robotiques est une chose complexe. Le m´ecanisme doit assurer la stabilit´e de la prise, maˆıtriser l’effort exerc´e sur l’objet saisi et g´erer l’opposition continue `a certains efforts comme les efforts gravita-tionnels. La pr´ehension robotique montre d’ailleurs que les actions courantes (tenir, saisir, soulever, pousser, ...) ne sont pas seulement m´ecaniques, mais font intervenir un ensemble de capteurs le plus souvent int´egr´es au syst`eme de pr´ehension (capteurs de position, tac-tiles, de force ou visuels).
En se basant sur l’exemple de la main humaine, on distingue deux types de pr´ehension possibles (figure 1.1).
1.2. La manipulation en robotique
Figure 1.1 – Les deux modes de pr´ehension d’objet [1]
a) la prise de l’objet est palmaire, elle fait intervenir plusieurs doigts ainsi que la paume de la main. Dans cette configuration, les doigts ex´ecutent le mˆeme mouvement. Leurs d´eplacements ne n´ecessitent pas forcement d’ˆetre d´ecoupl´es et ils peuvent fonctionner de mani`ere sym´etrique. La prise de l’objet est g´en´eralement ferme, au d´etriment de la pr´ecision dans son positionnement ;
b) la prise est qualifi´ee de pluridigitale. La configuration dans laquelle se trouve l’ob-jet devient essentielle. Le mouvement des doigts est plus complexe : la pr´ehension n´ecessite un certain positionnement des ´el´ements terminaux dans l’espace. De plus, chaque extr´emit´e des doigts tenant l’objet doit appliquer une force pr´ed´efinie sur l’objet. En effet, si ces forces appliqu´ees sont trop faibles ou mal r´eparties, l’objet peut glisser. Au contraire, si les forces appliqu´ees sont excessives, l’objet peut ˆetre endommag´e.
Ainsi, dans la conception d’un pr´ehenseur, plusieurs types d’attributs peuvent ˆetre recherch´es comme par exemple :
– privil´egier la stabilit´e de la prise de l’objet, avec une prise ferme et solide ;
– privil´egier la manipulabilit´e des objets pour gagner en dext´erit´e et en finesse de maniabilit´e ;
– privil´egier la rigidit´e ou la souplesse de la prise, c’est-`a-dire jouer avec la compliance du pr´ehenseur.
Faire le choix de capacit´es avanc´ees de manipulation entraˆıne une complexification ´evidente du dispositif. Le d´eveloppement de manipulateurs dextres devient n´ecessaire pour r´epondre `a ces crit`eres.
1.2.2
Notion de manipulation dextre
La dext´erit´e, dans le cadre robotique, peut se d´efinir comme une capacit´e des ´el´ements terminaux `a agir de mani`ere fine et autonome dans l’ex´ecution des tˆaches `a effectuer. Elle mesure l’habilet´e du robot `a changer de configuration lorsqu’un objet est manipul´e. Dans le cas de pr´ehenseurs robotiques pluridigitaux, la notion inclut ´egalement la possibilit´e de d´eplacer ou r´eorienter un objet entre les diff´erents doigts du m´ecanisme, sans pour autant perdre la stabilit´e lors de la saisie de l’objet [2].
La dext´erit´e est un objectif particuli`erement recherch´e lorsque la tˆache requiert une configuration pr´ecise de l’objet au sein de l’organe terminal du robot (figure 1.1). Un objet peut avoir besoin d’ˆetre pivot´e tout en restant maintenu par le robot, d’ˆetre d´eplac´e de mani`ere fine ou encore d’ˆetre manipul´e de fa¸con suffisamment souple pour ne pas ˆetre endommag´e. Des ´el´ements terminaux comportant plusieurs degr´es de libert´e deviennent alors n´ecessaires pour conf´erer au robot davantage de dext´erit´e pour la manipulation.
Le mouvement transitoire de r´eorientation de l’objet est produit par l’action concomi-tante de plusieurs doigts. La robustesse de la prise est ´egalement un objectif sous-jacent `a la tˆache car elle permet d’´evaluer la capacit´e `a tenir l’objet manipul´e en d´epit d’un ensemble de perturbations possibles pouvant affecter le bon d´eroulement de la tˆache (oc-currence de forces inopin´ees, estimations erron´ees des caract´eristiques de l’objet, ...) [3]. Des indices capables de quantifier le degr´e de dext´erit´e et/ou d’anthropomorphisme de dispositifs de manipulation robotique dextre ont d’ailleurs ´et´e propos´es dans la litt´erature [4]. Il a ´et´e observ´e qu’une main manipulant un objet au moyen de contacts rigides, non roulants et non-glissants n´ecessitent au moins trois doigts pourvus de trois articulations par doigt pour atteindre un niveau acceptable de dext´erit´e [5]. G´en´eralement, les pr´ehen-seurs robotiques qualifi´es de dextres utilisent au moins neuf degr´es-de-libert´e motoris´es et ind´ependants.
1.2.3
Anthropomorphisme
Les syst`emes m´ecatroniques d´edi´es aux tˆaches de manipulation dextres peuvent ˆetre d’inspiration anthropomorphe ou non. L’anthropomorphisme d´esigne la capacit´e de l’or-gane effecteur robotique `a imiter, en partie ou totalement, la main humaine dans la mesure o`u la forme, la taille et l’aspect g´en´eral sont pris en consid´eration. L’anthropomorphisme est li´e aux propri´et´es externes perceptibles, et n’est pas en soi une mesure de ce que la main peut accomplir sur le plan fonctionnel. Au contraire, la notion de dext´erit´e est li´ee `a la capacit´e r´eelle du syst`eme et s’affranchit de facteurs esth´etiques.
L’anthropomorphisme n’est pas n´ecessaire pour parvenir `a un haut niveau de dext´e-rit´e, mˆeme s’il est ´evident que la main de l’homme en est un parfait exemple. Elle est tr`es souvent consid´er´ee comme un mod`ele valable pour la conception de manipulateurs robotiques. C’est pourquoi dans leurs conception, on tend `a s’en inspirer, plus ou moins fortement, afin de conf´erer au manipulateur robotique des capacit´es ´equivalentes.
La conception de pr´ehenseurs dextres a, de ce fait, fortement int´eress´e la communaut´e scientifique depuis plusieurs ann´ees. Plusieurs exemples marquants sont pr´esent´es dans ce qui suit.
1.3. Technologies d’actionnement ´electriques pour la conception de pr´ehenseurs robotiques dextres
1.2.4
Exemples de manipulateurs robotiques
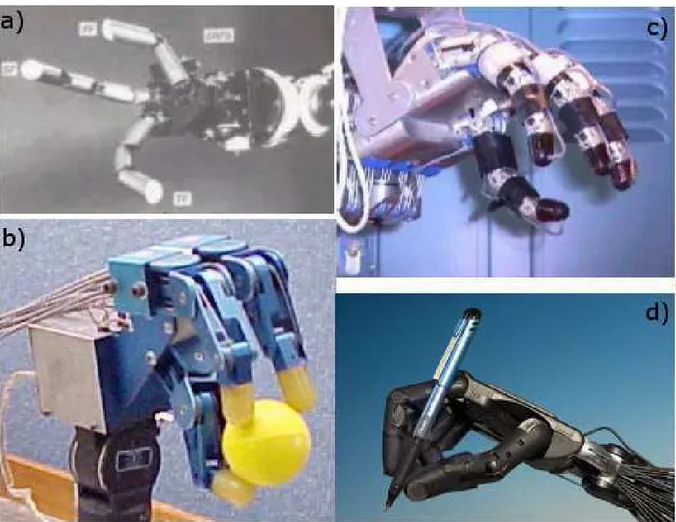
Le premier manipulateur robotique a ´et´e d´evelopp´ee au Japon en 1979 par Okada [6] (figure 1.2 a)). Il s’agit d’un manipulateur `a trois doigts, dont l’un est opposable aux deux autres. Elle est de taille sup´erieure `a la main de l’homme et comporte onze articu-lations, toutes command´ees. Cette main poss`ede un actionnement d´eport´e o`u les moteurs ´electriques d´eplacent des tendons. Elle est ´equip´ee de capteurs de positions articulaires et moteurs, et ´egalement de capteurs de force au niveau moteur. Deux projets pionniers ont ensuite vu le jour dans les ann´ees 80 : la main du Stanford /Jet Propulsion Laboratory (JPL) [7] (figure 1.2 b)), avec un design int´egr´e et celle du Massachusetts Institute of Technology (MIT)/Utah [8] (figure 1.2 c)). La premi`ere poss`ede neuf articulations, toutes command´ees et r´eparties sur trois doigts. Sa taille est de l’ordre de celle de la main hu-maine, tandis que la transmission est assur´ee par des tendons, eux-mˆemes actionn´es par des moteurs ´electriques. De nombreux capteurs sont utilis´es : des capteurs de position moteur, de tension dans les tendons et des capteurs de force `a l’extr´emit´e des doigts. La seconde est une main `a quatre doigts comportant seize degr´es de libert´e ´egalement tous command´es. La taille est ´equivalente `a celle de la main de l’homme. Les tendons sont cette fois command´es de mani`ere pneumatique. Elle comporte notamment des capteurs de positions articulaires et des capteurs de tension.
Par la suite, de nombreux projets ont ´et´e d´evelopp´es de par le monde. Parmi les plus connus, il est possible de citer les suivantes : la main Barret, construite en 1988 [9] est actionn´ee par des moteurs brushless, la main construite par le DLR en 2000 [10] utilise la technologie harmonic drive et plus r´ecemment la main Dexmart [11], dont les doigts sont r´ealis´es en prototypage rapide. La main Shadow (figure 1.2 d)), construite en 2002 [12] est ´egalement souvent cit´ee en r´ef´erence car elle int`egre les 23 degr´es de libert´e de la main humaine dans ses cinq doigts, se rapprochant d’une cin´ematique anthropomorphe.
Mˆeme si les champs d’application sont nombreux et tr`es diff´erents les uns des autres, les manipulateurs robotiques poss`edent une conception commune en quelques points es-sentiels. Chacun est compos´e de plusieurs actionneurs, qui sont g´en´eralement ´electriques ou plus rarement pneumatiques. Le corps du robot est le plus souvent m´ecanique sauf dans de rares exceptions. La conception de ces manipulateurs requiert d’importantes propri´et´es selon l’utilisation souhait´ee. Les pr´ehenseurs pr´esent´es pr´ec´edemment utilisent des types d’actionnement diff´erents. Un panorama des technologies existantes est d´evelopp´e dans le paragraphe suivant.
1.3
Technologies d’actionnement ´
electriques pour la
conception de pr´
ehenseurs robotiques dextres
Il existe principalement deux familles d’actionneurs pour la conception de manipu-lateurs robotiques poss´edant une dext´erit´e ´elev´ee : les actionneurs ´electriques et pneu-matiques. Ces derniers ont montr´e leurs performances dans la main Shadow. Son ac-tionnement est r´ealis´e par des muscles artificiels McKibben, constitu´es d’une chambre de contraction/extension `a air sous pression dont la variation de volume cr´ee le mouve-ment souhait´e. Les actionneurs ´electriques restent cependant tr`es majoritairemouve-ment utilis´es.
Figure 1.2 – Quelques manipulateurs robotiques : la main Okada (a)), la main Stanford (b)), la main Utah (c)), la main Shadow (d))
En effet, ils fournissent de bonnes performances en terme de commande (position et/ou vitesse), pr´esentent un rapport raisonnable poids/puissance et requi`erent peu de disposi-tifs suppl´ementaires, contrairement aux actionneurs pneumatiques (compresseurs notam-ment). Les actionneurs ´electriques peuvent eux-mˆemes ˆetre classifi´es en deux cat´egories : les actionneurs `a simple-effet et les actionneurs `a double-effet [13].
1.3.1
Les actionneurs `
a double-effet
Les actionneurs `a double-effet g´en`erent un mouvement dans chaque direction pour une articulation. Deux familles existent : ceux sous-actionn´es, qui poss`edent moins de moteurs que d’articulations, et ceux comportant un moteur par degr´e de libert´e.
La premi`ere famille offre plusieurs possibilit´es aboutissant `a des pr´ehenseurs n’appor-tant pas la plus haute dext´erit´e : soit les articulations sont alternativement actionn´ees par le moteur, moyennant un processus de s´election des articulations `a d´eplacer, soit les articulations sont coupl´ees, dans ce cas, le pr´ehenseur perd au moins un degr´e de libert´e.
1.3. Technologies d’actionnement ´electriques pour la conception de pr´ehenseurs robotiques dextres
La premi`ere configuration pr´esente peu d’int´erˆet dans la conception de pr´ehenseurs dextres car s’il n’est possible que de d´eplacer les doigts les uns apr`es les autres, bon nombre de tˆaches ne peuvent alors ˆetre r´ealis´ees.
Le cas o`u les articulations sont coupl´ees offre d´ej`a plus de possibilit´es de manipulation. Les deux exemples les plus r´epandus sont pr´esent´es en figure 1.3.
Figure 1.3 – Deux exemples d’actionneurs ´electriques `a double-effet
– Le cas a) pr´esente un train d’engrenage o`u le moteur entraine la premi`ere roue dent´ee sur laquelle est fix´ee la premi`ere articulation. Ensuite la seconde articulation est entrain´ee par le train d’engrenage ;
– Dans le cas b), les mouvements articulaires sont coupl´es par l’interm´ediaire de cˆables. Dans la suite, les cˆables seront assimil´es `a des tendons. Ces deux m´ecanismes ont l’avantage d’avoir un syst`eme de transmission pas ou peu ´elastique (les raideurs des cˆables sont souvent tr`es ´elev´ees), ce qui permet de contrˆoler plus facilement la position de la seconde articulation.
Il existe ´egalement une solution introduisant une souplesse suppl´ementaire avec une liaison m´ecanique d´eformable, figure 1.4.
Figure 1.4 – Actionneur ´electrique `a double-effet avec tendon d´eformable
Un ressort vient rompre la rigidit´e entre les deux articulations permettant ainsi au pr´ehenseur de mieux s’adapter aux objets qu’il manipule. Lorsque l’objet entre en contact avec l’´el´ement terminal, ce dernier se d´eforme et ´epouse plus facilement la forme de l’objet. Le principal inconv´enient est le dimensionnement du tendon d´eformable (ici le ressort) en terme de raideur afin de parvenir `a une pr´ehension suffisamment efficace, assurant le compromis id´eal entre une prise d’objet forte et une bonne adaptation `a la forme de l’objet manipul´e. Cette technologie est utilis´ee dans la main du DLR [10].
La deuxi`eme grande famille d’actionneurs `a double-effet est plus r´epandue parmi les pr´ehenseurs existants [6], [7], [11]. Chaque articulation est pilot´ee dans les deux sens par un seul moteur. C’est probablement la solution qui semble la plus intuitive. Cependant, le principal inconv´enient est l’attention particuli`ere qu’il faut porter aux jeux m´ecaniques car ils peuvent devenir probl´ematiques, aussi bien pour des liaisons `a engrenages que pour des liaisons `a base de tendons (d´etente possible). De plus, dans le cas des liaisons `a base de tendons, la longueur de la chaˆıne de transmission se doit d’ˆetre constante au cours du fonctionnement, sous peine de comportement non lin´eaire, notamment de type hyst´er´esis. Pour pallier ces variations, des syst`emes de compensation m´ecaniques sont r´eguli`erement ajout´es.
1.3.2
Les actionneurs simple-effet
La technologie d’actionneurs `a simple-effet est la plus simple dans son comportement : chaque moteur g´en`ere un d´eplacement dans une seule direction. Le d´eplacement dans le sens oppos´e est effectu´e de mani`ere externe, soit par un ´el´ement passif (le plus souvent par un ressort), soit par un ´el´ement actif (un deuxi`eme moteur g´en`ere le mouvement antagoniste). Ces deux cas sont sch´ematis´es en figure 1.5.
1.3. Technologies d’actionnement ´electriques pour la conception de pr´ehenseurs robotiques dextres
Figure 1.5 – Les deux principaux types d’actionneurs ´electriques `a simple-effet
Dans le cas a), l’´el´ement passif stocke l’´energie cr´e´ee par le moteur durant la phase d’actionnement et la restitue pendant la phase de rappel. C’est un m´ecanisme qui sim-plifie consid´erablement le sch´ema de conception et qui permet de r´eduire par cons´equent le nombre de composants. Les principaux inconv´enients du tendon passif sont la perte de puissance et ´egalement la limitation de la bande passante du fait de la faible raideur du ressort devant celle des cˆables. De plus, la m´ecanique doit ˆetre r´eversible pour que l’´el´e-ment passif puisse d´eplacer l’articulation, c’est-`a-dire qu’elle soit capable de transmettre les efforts dans les deux sens de fonctionnement : dans le sens direct, du moteur vers l’articulation et dans le sens indirect, de l’articulation vers le moteur. Les syst`emes vis `a billes sont un des exemples les plus courants de m´ecanisme r´eversible car leurs coefficients de frottements en sens indirect sont g´en´eralement tr`es faibles. Leur utilisation est donc adapt´ee aux actionneurs `a simple-effet.
Dans le cas b), deux moteurs pilotent la mˆeme articulation dans les deux directions possibles. Ce m´ecanisme ouvre plus de perspectives en terme de commande car les deux moteurs peuvent ˆetre contrˆol´es en mˆeme temps. Il est notamment possible de changer la pr´etension (pr´echarge) des tendons. Ceci permet de modifier rapidement la raideur de l’articulation et peut ˆetre int´eressant lorsque le pr´ehenseur manipule un objet. Cette technologie permet aussi de compenser la d´etente des cˆables aussi bien lors de son fonc-tionnement qu’au cours du temps. C’est la mani`ere la plus compl`ete pour contrˆoler une articulation, mais elle pr´esente des inconv´enients consid´erables d’int´egration au sein des pr´ehenseurs. En effet, cela m`ene `a des sch´emas complexes comprenant deux fois plus
de moteurs que d’articulations. Par cons´equent, le nombre ´elev´e de composants cr´ee des probl`emes d’´echelle et le coˆut du manipulateur s’en trouve d’autant plus ´elev´e.
1.3.3
Contraintes d’int´
egration pour la conception d’un
mani-pulateur anthropomorphe et dextre
Pour entreprendre le d´eveloppement d’un manipulateur qui pr´esente une cin´ematique anthropomorphique et une grande dext´erit´e, un nombre important de contraintes sont `a prendre en compte (figure 1.6) :
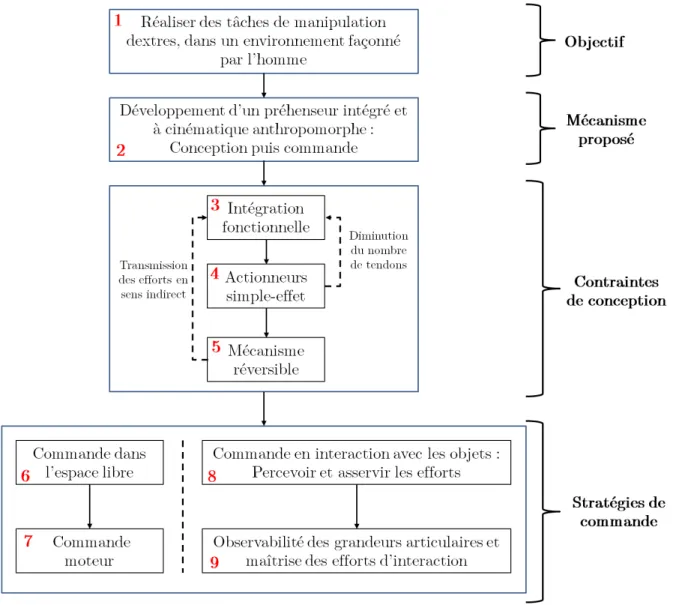
Figure 1.6 – Pr´esentation sch´ematique des contraintes de conception d’un pr´ehenseur robotique multidigital pour la manipulation dextre
1. L’objectif recherch´e est de r´epondre `a une finalit´e de manipulation. La priorit´e ici est de r´ealiser des tˆaches de manipulation dextres dans un environnement fa¸conn´e par
1.3. Technologies d’actionnement ´electriques pour la conception de pr´ehenseurs robotiques dextres
l’homme (manipulation d’objets fragiles, de formes et de tailles vari´ees par exemple) ; 2. La recherche d’une cin´ematique anthropomorphe conduit `a s’inspirer directement du mod`ele de la main humaine et de ses 23 degr´es de libert´e. Elle repr´esente l’exemple le plus abouti de pr´ehenseur dextre. Pour concevoir un pr´ehenseur robotique ayant des propri´et´es similaires, une optimisation de la m´ecatronique et des lois de commande devient primordiale ;
3. Aux contraintes de dext´erit´e et d’anthropomorphisme s’ajoutent alors une contrainte d’int´egration technologique pour r´epondre aux probl`emes d’´echelle.
Un bon compromis dans le choix des ´el´ements m´ecaniques et ´electroniques, des cap-teurs et des lois de commande est d’une importance capitale dans la r´ealisation d’un pr´ehenseur dextre. Le d´eveloppement de mains robotiques anthropomorphiques avec un haut niveau de dext´erit´e et de nombreux degr´es de libert´e augmente consid´erablement la complexit´e de conception m´ecatronique. La structure cin´ematique de la main et des doigts, l’int´egration de nombreux capteurs (position, force, couple, tactile), le choix d’ac-tionneurs poss´edant les efforts n´ecessaires en terme de couple jouent un rˆole important lors du d´eveloppement de la g´en´eration actuelle de mains robotiques.
La priorit´e de conception privil´egi´ee dans notre cas est l’anthropomorphisme, tout en conf´erant au pr´ehenseur le plus haut niveau de dext´erit´e possible. Pour concevoir un tel manipulateur poss´edant de nombreux degr´es de libert´e, il est essentiel de simplifier les sch´emas de cˆablage. Il est ´evident que la multiplication du nombre de poulies, en plus du routage complexe des cˆables, requiert une complexit´e de conception croissante.
4. L’utilisation des actionneurs `a simple-effet avec une action antagoniste passive, bas´ee sur des ressorts de rappel d´ecrits en figure 1.5 a), rend possible la simplification des sch´emas de cˆablage ;
5. Ce choix requiert une m´ecanique r´eversible qui pr´esente des avantages consid´erables et innovants dans son application aux pr´ehenseurs robotiques.
Le faible niveau de frottement des vis `a billes joue un rˆole essentiel dans la conception de pr´ehenseurs int´egr´es. En effet, la r´eversibilit´e du m´ecanisme permet de transmettre les efforts appliqu´es sur les parties terminales du pr´ehenseur jusqu’aux moteurs : une force appliqu´ee au bout d’un doigt se r´epercute alors comme un couple r´esistant sur l’arbre moteur. De ce fait, il devient possible d’estimer les efforts appliqu´es `a l’extr´emit´e du pr´ehenseur sans capteurs de couples articulaires. Cette propri´et´e remarquable permet de ne conserver que des capteurs proprioceptifs (mesurant les informations physiques internes au syst`eme) et de se passer de capteurs ext´eroceptifs (mesurant les informations directement au niveau de l’interaction du syst`eme avec son environnement) sous r´eserve de connaˆıtre les points d’application des efforts sur le m´ecanisme. Cette propri´et´e repr´esente alors un gain consid´erable en terme d’int´egration.
Cependant, optimiser de cette mani`ere la m´ecatronique du pr´ehenseur n´ecessite une connaissance extrˆemement pr´ecise de celui-ci afin de commander les grandeurs ext´ero-ceptives correctement `a partir des grandeurs proprioext´ero-ceptives. En effet, si les grandeurs terminales ne peuvent ˆetre mesur´ees par des capteurs ext´eroceptifs, il convient de les estimer et cela ne peut se faire qu’`a partir d’un mod`ele pr´ecis du comportement du
pr´e-henseur. Cette ´etape est primordiale dans le but de le commander car elle est la seule `a pouvoir renseigner sur sa configuration terminale.
6. La commande du pr´ehenseur suppose de connaˆıtre son positionnement afin de contrˆo-ler son d´eplacement dans l’espace libre (en l’absence de contacts ext´erieurs) ; 7. La maˆıtrise du positionnement du pr´ehenseur peut alors ˆetre obtenue par la
com-mande en position des moteurs ;
8. La commande du pr´ehenseur n´ecessite ´egalement de percevoir les interactions avec son environnement, notamment les forces cr´e´ees par les objets sur le m´ecanisme ; 9. La strat´egie de perception des efforts d’interaction consiste `a d´eterminer
pr´ealable-ment les relations entre les courants moteurs et les efforts cr´e´es par les objets puis `a estimer ces efforts par le biais d’observateurs afin de pouvoir les commander. Ainsi, cette technologie optimisant les sch´emas de cˆablage, minimisant les frottements et supprimant l’encombrement li´e aux capteurs ext´eroceptifs pr´esente une solution nou-velle pour concevoir des manipulateurs poly-articul´es int´egr´es. L’absence de capteurs ter-minaux va alors n´ecessiter une ´etude approfondie du syst`eme en terme de mod´elisation, d’observation et de commande :
– Identification du syst`eme : la mod´elisation pr´ecise des pr´ehenseurs n´ecessite la mo-d´elisation de leurs non-lin´earit´es ;
– Synth`ese des observateurs : ils sont adapt´es pour l’estimation des grandeurs termi-nales `a partir des informations proprioceptives ;
– Synth`ese des lois de commande en position et en force : elles sont n´ecessaires pour manipuler les objets.
Les modalit´es de la commande dans le contexte robotique sont ´etudi´ees dans la suite.
1.4
Commande de pr´
ehenseurs robotiques
1.4.1
Introduction
La commande de robots et en particulier de pr´ehenseurs est hi´erarchis´ee au niveau d’ex´ecution des tˆaches : la commande haut niveau et la commande bas niveau. La com-mande haut niveau traite des probl`emes de configuration du pr´ehenseur et de la mani`ere de prendre en compte son interaction avec les objets et l’environnement. Plus pr´ecis´ement, elle d´efinit le positionnement souhaitable des ´el´ements terminaux du pr´ehenseur ainsi que les efforts `a appliquer sur les objets pour les maintenir sans les endommager en vue d’une tˆache donn´ee. La commande bas niveau ex´ecute les tˆaches impos´ees par la commande haut niveau : elle int`egre ainsi les lois de commande et les boucles de r´egulation au sens de l’automatique. La figure 1.7 r´esume sch´ematiquement cette commande robotique. Dans ce m´emoire, la commande bas niveau est celle qui sera trait´ee.
1.4. Commande de pr´ehenseurs robotiques
Figure 1.7 – Repr´esentation sch´ematique de la commande d’un pr´ehenseur
La commande bas niveau de pr´ehenseurs robotiques comprend d’une part leur posi-tionnement dans l’espace libre, obtenu grˆace `a une commande en position (parfois aussi en vitesse) et d’autre part, un contrˆole des efforts d’interaction caract´eris´e par une commande en force. Il existe un nombre important de strat´egies possibles dans la litt´erature pour int´egrer ces objectifs de commande [14]. On recense principalement les commandes en ef-fort directes et indirectes [15]. Chacune offre des avantages et inconv´enients et leurs choix d´ependent alors des possibilit´es mat´erielles et du cahier des charges souhait´e. Ces deux types de commandes sont pr´esent´ees par la suite avec plusieurs exemples d’application.
1.4.2
Commande en force indirecte
Lors d’une commande en force indirecte, aucune consigne d’effort n’est explicitement pr´esente dans la structure de commande. Le robot est alors uniquement command´e en position (et ´eventuellement en vitesse). Les efforts appliqu´es peuvent ˆetre maˆıtris´es en adaptant les consignes de positions en pr´esence d’interactions. Plusieurs exemples illus-trant la commande en force indirecte sont pr´esent´es dans ce qui suit.
1.4.2.1 Commande en compliance passive
La compliance d´esigne la capacit´e d’un robot `a avoir un comportement souple lors des tˆaches de manipulation. Elle est homog`ene physiquement `a l’inverse d’une raideur. Jouer sur la compliance d’un pr´ehenseur permet d’´eviter de manipuler les objets avec une raideur infinie.
La compliance passive consiste `a utiliser une structure m´ecanique d´eformable en pr´e-sence d’efforts de contact. L’ajout de cette structure d´eformable peut se faire aussi bien sur l’´el´ement terminal du robot que sur la table de travail (table compliante par exemple) [16]. La d´eformation de la structure permet de corriger localement les erreurs de position-nement du robot. En revanche, son utilisation est souvent propre `a une seule tˆache de manipulation.
1.4.2.2 Commande par retour d’effort implicite
Dans cette approche, le comportement flexible du robot est obtenu de mani`ere logi-cielle. Il n’est plus n´ecessaire de modifier le robot ou son environnement en ajoutant des ´el´ements d´eformables.
La commande par raideur active sans retour d’effort [17] (figure 1.8) est un exemple de commande par retour d’effort implicite. Le robot est alors consid´er´e comme un ressort, dont la raideur est programmable par modification des matrices de gains des boucles de r´egulation en position (KP) et en vitesse (KV). Ce principe de commande est alors
ana-logue `a une commande proportionnelle-d´eriv´ee. Par cette m´ethode, un gain proportionnel faible permet de commander un axe en effort tandis qu’un gain proportionnel important permet de le commander en position.
Figure 1.8 – Principe de la commande par raideur active sans retour d’effort
La commande en imp´edance [18] est ´egalement une approche possible de commande par retour d’effort implicite. La commande par raideur active en est alors un cas particulier o`u l’imp´edance est consid´er´ee statique via la raideur.
1.4.2.3 Commande par retour d’effort explicite
Comme pour l’approche pr´ec´edente, la compliance du robot est ´egalement obtenue de mani`ere logicielle avec la commande par retour d’effort explicite [19]. Le robot est principalement pilot´e en position. Les efforts d’interaction avec l’environnement viennent corriger le signal d’entr´ee (figure 1.9).
Figure 1.9 – Principe de la commande par retour d’effort explicite
Dans cette configuration, la commande s’adapte `a son environnement. Les efforts me-sur´es interf`erent avec la consigne de position par l’interm´ediaire d’une matrice CF dite de
compliance. Les ´el´ements de cette matrice agissent directement sur la compliance des axes command´es. Pour un axe, si la valeur de gain est petite (axe du robot raide), celui-ci est command´e en position et inversement, si cette valeur est grande (axe du robot souple),
1.4. Commande de pr´ehenseurs robotiques
celui-ci est command´e en effort. Ce type de commande peut avoir des applications utiles, notamment pour la sˆuret´e de fonctionnement : elle peut rendre un robot souple ou rigide lors de contacts non souhait´es avec son environnement.
1.4.3
Commande en force directe
La commande en force directe se caract´erise par l’introduction d’une consigne de force pour asservir l’effort exerc´e sur un objet `a cette valeur. Des approches possibles sont pr´esent´ees ci-dessous.
1.4.3.1 Commande en force explicite
Il s’agit du sch´ema de commande le plus simple (figure 1.10) [19]. La mesure de force est seulement utilis´ee, sans l’information de position. Le principe est alors un pur asser-vissement de force `a une valeur de consigne.
Figure 1.10 – Principe de la commande en force explicite
1.4.3.2 Commande par raideur active avec retour d’effort
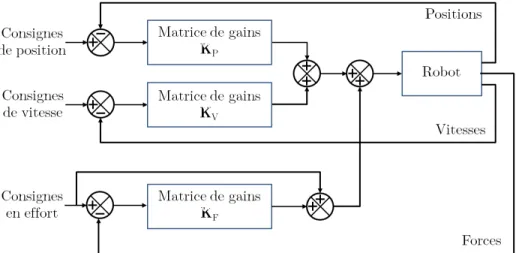
Cette approche suit le mˆeme principe qu’en 1.4.2.2, avec un bouclage suppl´ementaire en effort [17] (figure 1.11). Le robot est alors contrˆol´e simultan´ement en position (´even-tuellement en vitesse) et en force.
1.4.3.3 Commande hybride
La commande hybride parall`ele force/position [20] permet de d´efinir le type de com-mande de chaque axe du robot. Chaque degr´e de libert´e du robot est pilot´e soit en position soit en force par l’interm´ediaire d’une matrice de s´election S (figure 1.12). Celle ci est dia-gonale et contient des ´el´ements valant 0 ou 1 selon que le degr´e de libert´e est command´e en position ou en effort.
Figure 1.12 – Principe de la commande hybride
La commande hybride impose `a l’´el´ement terminal une s´erie de contraintes lui per-mettant de suivre une trajectoire tout en appliquant des efforts `a son environnement dans les autres directions. Ce principe de commande poss`ede des applications int´eressantes, par exemple, dans l’usinage de pi`eces m´ecaniques : l’outil peut suivre une trajectoire sur un axe horizontal tout en imposant un effort sur l’objet `a usiner selon l’axe vertical. La commande hybride offre l’avantage de commander simultan´ement la force et la position. Cependant, les transitions entre les deux types de commande doivent ˆetre maˆıtris´ees afin d’´eviter d’´eventuelles instabilit´es.
1.4.3.4 Commande hybride externe
Contrairement `a la commande hybride pr´esent´ee ci-dessus, la commande hybride ex-terne force/position [21] [22], permet la contribution selon un mˆeme axe d’une commande en position et d’une commande en force. Son sch´ema th´eorique est pr´esent´e sur la figure 1.13.
Figure 1.13 – Principe de la commande hybride externe
L’asservissement de la position est interne dans cette structure, la boucle de r´egula-tion de force est hi´erarchiquement sup´erieure. Ainsi, une variar´egula-tion de l’effort se traduit
1.5. Positionnement scientifique du sujet et probl´ematique
directement par un d´eplacement du robot : l’asservissement de force vient corriger une consigne de position initiale afin d’exercer l’effort souhait´e sur l’objet manipul´e.
Une matrice de s´election S peut ´egalement ˆetre ajout´ee `a la structure de la commande hybride externe, lorsque l’on ne souhaite pas commander certains axes en effort. Dans ce cas, l’axe ou les axes concern´es sont uniquement asservis en position.
1.5
Positionnement scientifique du sujet et probl´
e-matique
Le choix d’un m´ecanisme r´eversible r´esultant d’une m´ecatronique optimis´ee permet th´eoriquement de se passer de capteurs ext´eroceptifs et ainsi de gagner en encombrement et en coˆut lors de la conception de pr´ehenseurs robotiques dextres. Sachant que la com-mande du pr´ehenseur est uniquement bas´ee sur des mesures proprioceptives, seule une connaissance pr´ecise de tous les ´el´ements du syst`eme et de ses non-lin´earit´es structurelles permet de reconstruire les grandeurs terminales n´ecessaires `a la r´ealisation des tˆaches ro-botiques. Le recours `a des m´ethodes avanc´ees en terme d’identification et de commande permet d’envisager des tˆaches de manipulation fine.
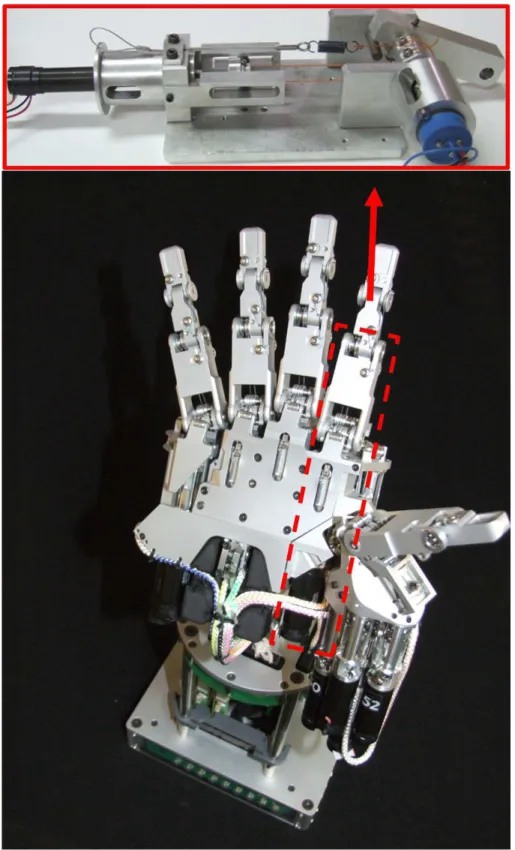
Figure 1.14 – Main HANDLE compos´ee des 23 degr´es de libert´e [23]
Le paragraphe 1.3 a permis d’introduire les diff´erents types d’actionneurs ´electriques et a montr´e que le choix des actionneurs `a simple-effet apporte des garanties importantes en mati`ere d’int´egration. Le Laboratoire de Robotique Interactive du CEA − LIST a con¸cu en ce sens une main poly-articul´ee repr´esent´ee en figure 1.14 incluant tous les degr´es de libert´e de la main humaine. Elle s’appuie sur des m´ecanismes r´eversibles permettant d’avoir une m´ecanique int´egr´ee pour la commande en effort sans capteurs ext´eroceptifs. L’application des m´ethodologies d’observation issues du champ de l’automatique permet de tirer profit des mesures proprioceptives. L’´etude se restreint ici `a l’espace articulaire (figure 1.15), c’est-`a-dire `a un actionneur d’une des phalanges de cette main.
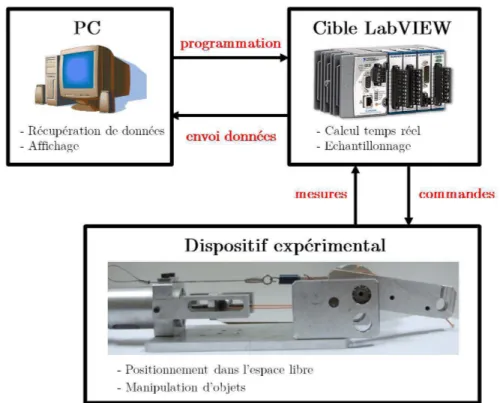
Figure 1.15 – Dispositif exp´erimental dans le contexte articulaire
Pour cette ´etude, une maquette exp´erimentale utilisant une technologie identique `a la main a ´et´e d´evelopp´ee. Il s’agit donc d’un actionneur ´electrique `a simple-effet au sein
1.5. Positionnement scientifique du sujet et probl´ematique
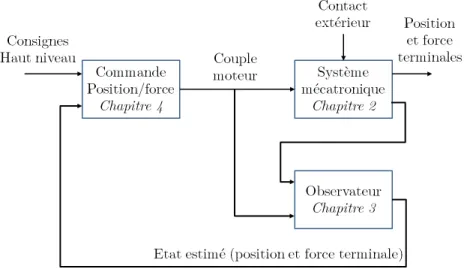
duquel il est possible de distinguer une partie ´electrique et une partie m´ecanique. La partie ´electrique est compos´ee d’un moteur `a courant continu muni d’un codeur mesurant sa position et d’une r´esistance de shunt pour la mesure de son courant d’induit. Le mouvement cr´e´e par le moteur est transmis `a la partie m´ecanique via une vis `a billes puis une transmission `a cˆables. D’un point de vue global, le moteur `a courant continu cr´ee le d´eplacement du doigt. Un effort appliqu´e sur le doigt se r´epercute alors sur l’arbre moteur via un couple r´esistant. L’´etude de cet actionneur est r´ealis´ee en plusieurs phases (figure 1.16) :
Figure 1.16 – Sch´ema g´en´eral de la strat´egie de commande bas niveau abord´ee au cours du m´emoire
1. La premi`ere consiste `a mod´eliser l’actionneur m´ecatronique afin d’exprimer les gran-deurs proprioceptives (position et courant moteur) en fonction des grangran-deurs ter-minales (position et force appliqu´ees sur l’articulation). Le syst`eme n’ayant pas de capteurs terminaux, il est essentiel de poss´eder un mod`ele suffisamment fiable pour connaˆıtre `a chaque instant sa configuration exacte. Dans le cas contraire, les incon-v´enients d’un mod`ele trop simpliste sont r´edhibitoires : perte de dext´erit´e et perte de performances (´eventuellement instabilit´e) des lois de commande. La perte de dex-t´erit´e est ´evidente lorsque la position et les interactions ext´erieures ressenties sont impr´ecises, tout comme les pertes en performances : pr´ehenseur mal positionn´e par rapport `a l’objet, serrage dans le vide, serrage excessif... Ainsi, la mod´elisation de ce type d’actionneur va non seulement consister `a analyser sa dynamique mais aussi `a caract´eriser certaines non-lin´earit´es, en particulier celles li´ees au frottement et `a la gravit´e. Cette phase de mod´elisation n´ecessite alors de d´evelopper des techniques d’identification adapt´ees `a ce types de non-lin´earit´es.
2. La seconde phase se base sur le mod`ele de l’actionneur, pour reconstruire les gran-deurs terminales en temps r´eel. La th´eorie des observateurs offre une perspective int´eressante pour leur estimation directe `a partir du mod`ele ´etabli.
connaissance de la position terminale de l’actionneur et des efforts appliqu´es sur ce dernier, la synth`ese d’une loi de commande robotique est propos´ee. Une approche par commande hybride externe force/position adapt´ee au cas articulaire (un degr´e de libert´e) est ´etudi´ee dans ce m´emoire. La commande de l’actionneur va alors se d´ecomposer en une commande en position permanente et une commande en effort venant interagir avec la pr´ec´edente lorsque l’actionneur est en contact avec un objet.
1.6
Conclusion
Ce premier chapitre a introduit la probl´ematique de la manipulation en robotique. Les manipulateurs robotiques consid´er´es dans le contexte de la manipulation fine sont des pr´ehenseurs int´egr´es, caract´eris´es par un haut niveau de dext´erit´e.
En optimisant la conception d’un syst`eme bas´e sur des actionneurs `a simple-effet, r´e-versibles, le CEA − LIST a d´evelopp´e un pr´ehenseur robotique incluant tous les degr´es de libert´e de la main humaine. Ses propri´et´es avantageuses pour son int´egration fonc-tionnelle, `a savoir l’absence de capteurs terminaux, n´ecessitent une ´etude avanc´ee de son comportement dynamique afin de d´evelopper une commande performante.
Les travaux de cette th`ese se concentrent au niveau articulaire. Un mod`ele pr´ecis de l’articulation est n´ecessaire pour estimer les grandeurs ext´eroceptives au moyen des capteurs proprioceptifs `a disposition. La mod´elisation et l’identification des param`etres de l’actionneur m´ecatronique font l’objet du chapitre 2. Le chapitre 3 traite de l’estimation des grandeurs ext´eroceptives par la synth`ese d’observateurs. Cela permet d’aborder la commande du m´ecanisme dans le chapitre 4.
Chapitre 2
Mod´
elisation et identification de
2.1
Introduction
Les probl´ematiques expos´ees lors du premier chapitre concernant le syst`eme m´ecatro-nique ´etudi´e au cours de la th`ese n´ecessitent une premi`ere ´etape de mod´elisation. Le but de ce chapitre est de d´eterminer un mod`ele exp´erimental pr´ecis de l’actionneur m´ecatronique afin de pouvoir estimer les informations ext´eroceptives et de synth´etiser les futures lois de commande. Bas´ees sur des consid´erations physiques et/ou exp´erimentales, plusieurs m´e-thodes existent pour y parvenir. La fiabilit´e d’un mod`ele repose sur sa capacit´e `a d´ecrire correctement le comportement du syst`eme dans toutes ses configurations possibles. Les syst`emes robotiques offrent l’avantage de disposer d’outils de mod´elisation g´en´eraux qui s’appuient sur les lois de la m´ecanique.
Tous les param`etres et ´el´ements caract´eristiques d’un mod`ele sont rarement connus avec pr´ecision par la th´eorie. Dans de tr`es nombreux cas, il est essentiel de les d´etermi-ner exp´erimentalement en les identifiant. Un grand nombre de techniques d’identification existe dans la litt´erature. La mani`ere dont les param`etres d’un syst`eme sont identifi´es peut alors d´ependre de sa nature, de sa complexit´e ou des contraintes mat´erielles et ex-p´erimentales.
Une m´ethode g´en´erale de mod´elisation robotique est d’abord pr´esent´ee dans ce cha-pitre. Son application permet de fournir une ´evolution dynamique th´eorique de l’action-neur `a simple-effet. Celui-ci est essentiel car il permet d’exprimer les grandeurs propriocep-tives mesurables en fonction des grandeurs ext´eroceppropriocep-tives. Le mod`ele th´eorique n´ecessite alors d’ˆetre identifi´e exp´erimentalement. Pour cela, des outils d’identification sont recen-s´es. L’accent est mis sur les m´ethodes d’identification applicables dans le cadre robotique dont notamment l’identification par mod`ele inverse. Une repr´esentation d’´etat de l’ac-tionneur `a simple-effet est finalement introduite afin de faciliter l’estimation ult´erieure des variables ext´eroceptives.
2.2
G´
en´
eralit´
es
Un mod`ele est une repr´esentation math´ematique entre les entr´ees et les sorties d’un syst`eme. Il peut ˆetre statique ou dynamique et est caract´eris´e par son domaine de validit´e. Un mod`ele peut ˆetre utilis´e pour simuler un syst`eme dans le but, par exemple, d’am´eliorer la compr´ehension, la sˆuret´e de fonctionnement, le diagnostic de pannes ou encore pour synth´etiser des lois de commande bas´ees sur le mod`ele.
Selon les informations `a disposition sur les diff´erents syst`emes `a ´etudier, on peut dis-tinguer trois grands types de mod`eles :
– les mod`eles dits « boˆıte blanche » sont construits `a partir d’une analyse physique en appliquant soit les lois g´en´erales, fond´ees notamment sur des principes m´eca-niques, ´electromagn´etiques, thermodynamiques, quantiques, etc. Dans la pratique, il est toujours souhaitable d’´etablir un mod`ele de ce type. N´eanmoins, il arrive fr´e-quemment que le syst`eme soit trop complexe ou que les ph´enom`enes qui le r´egissent soient trop mal connus pour qu’il soit possible d’´etablir un mod`ele suffisamment pr´ecis pour l’application consid´er´ee.
![Figure 1.14 – Main HANDLE compos´ee des 23 degr´es de libert´e [23]](https://thumb-eu.123doks.com/thumbv2/123doknet/8028625.269078/40.918.208.718.503.761/figure-main-handle-compos-ee-des-degr-libert.webp)