Automorphismes et isomorphismes des graphes de Cayley
Texte intégral
Figure



Documents relatifs
Le centre de G est l'ensemble des éléments de G qui commutent avec tous les autres éléments.. L'ordre d'un groupe est
Si deux expressions polynomiales d'une variable x réelle et à coecients matriciels sont égales pour une innité de valeurs de x , on peut identier terme à terme tous les
Si deux expressions polynomiales d'une variable x réelle et à coecients matriciels sont égales pour une innité de valeurs de x , on peut identier terme à terme tous les
[r]
Ce résultat est important, car il montre que tout polynôme de terme dominant X n peut être vu comme le polynôme caractéristique d’une certaine matrice carrée d’ordre n (et
Dans la partie B nous nous occupons du cas où G est primaire et nous démontrons le résultat suivant qui donne la solution d'un problème posé par L. Nous commençons par étudier
The main result of this paper, which uses computer calculations as described in Section 4.2.2 of [HoP 89], contends that for all four maximal finite closed subgroups.. there
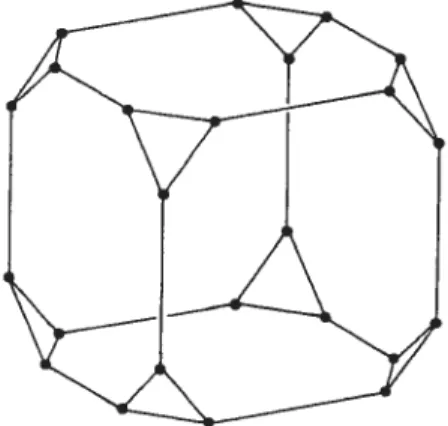
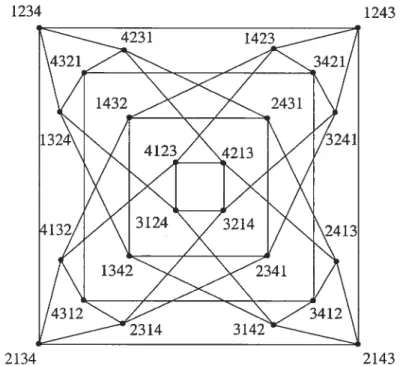
— Pour qu'un diagramme de Cayley soit isomorphe à une somme directe de diagrammes cycliques, il faut et il suffit qu'il soit connexe, commutatif et que deux chemins qui ont les
