HAL Id: hal-03013685
https://hal.inria.fr/hal-03013685v2
Submitted on 24 Feb 2021
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Lisa Roux, Margarida Romero, Frédéric Alexandre, Thierry Viéville, Chloé
Mercier
To cite this version:
Lisa Roux, Margarida Romero, Frédéric Alexandre, Thierry Viéville, Chloé Mercier. Développement
d’une ontologie pour l’analyse d’observables de l’apprenant dans le contexte d’une tâche avec des
robots modulaires. [Rapport de recherche] RR-9376, Inria. 2020, pp.48. �hal-03013685v2�
ISSN 0249-6399 ISRN INRIA/RR--9376--FR+ENG
RESEARCH
REPORT
N° 9376
Novembre 2020Project-Teams Mnemosyne and LINE laboratory
ontologie pour l’analyse
d’observables de
l’apprenant dans le
contexte d’une tâche avec
des robots modulaires
Lisa Roux , Margarida Romero , Frédéric Alexandre , Thierry Viéville
, Chloé Mercier
RESEARCH CENTRE BORDEAUX – SUD-OUEST
200 avenue de la Vieille Tour 33405 Talence Cedex
Lisa Roux
∗, Margarida Romero
†, Frédéric Alexandre
‡, Thierry
Viéville §, Chloé Mercier
¶Équipes-Projets Mnemosyne and LINE laboratory
Rapport de recherche n° 9376 — Novembre 2020 — 48 pages
∗Laboratoire LINE, INSPÉ de Nice- Lisa Roux <lisaroux.87@gmail.com>
†Laboratoire LINE, INSPÉ de Nice - Margarida Romero <margarida.romero@univ-cotedazur.fr> ‡Mnemosyne Inria Research Team - Frédéric Alexandre <frederic.alexandre@inria.fr>
§Mnemosyne Inria Research Team et Laboratoire LINE - Thierry Viéville <thierry.vieville@inria.fr> ¶Mnemosyne Inria Research Team - Chloé Mercier <chloe.mercier@inria.fr>
structurées, donc d’introduire un maximum d’informations a priori en amont de l’analyse pour permettre que les résultats soient significatifs.
L’apprenant·e est modélisé·e à partir de connaissances issues des sciences de l’éducation et des neurosciences cognitives, y compris les formalismes d’apprentissage machine, dans le cadre très précis d’une tâche -dite « CreaCube »- d’initiation à la pensée informatique, présentée sous forme d’un problème ouvert, qui implique la résolution d’un problème et de faire appel à la créativité. Ce document présente ces éléments et discute les problématiques d’exploration et exploitation, les différents buts (par exemple de performance, de célérité ou de maîtrise de la tâche), avant de relier cela aux différents types de mémoire et de discuter les bases de la résolution de problèmes, et l’engagement dans une activité d’apprentissage.
Il décrit ensuite la construction très précise d’une ontologie qui formalise ce processus de résolution de tâche et de construction de connaissances, prenant en compte les stimuli reçus, la découverte d’affordances, la pose d’hypothèses, bien distinguées de la notion de croyance, sans oublier les connaissances contextuelles.
La production est mise en partage sous forme de ressource libre et ouverte, et on discute en conclusion à la fois les implications et les perspectives de ce travail pionnier de formalisation d’une telle tâche d’apprentissage humain.
Ce rapport de recherche et l’ontologie correspond au travail de recherche de Lisa Roux, qui est aussi la principale autrice du document, encadrée par Margarida Romero et Frédéric Alexandre et a été réalisé dans le cadre du projet Aex AIDE soutenu par Otesia, l’Observatoire des impacts Technologiques, Économiques et Sociétaux de l’Intelligence Artificielle et du numérique.
Mots-clés : apprentissage de la pensée informatique, résolution de problème, ontologie, CreaCube, sciences de l’éducation computationnelles.
Abstract: The aim of this document is to present the design of an ontology allowing to carry out a modeling of the learner, the task and the observables during a learning activity, in order to develop a model applicable to the observed learning analytics which can be exploited to analyze them with computational approaches.
The challenge here is to work from a relatively small batch of data (a few dozen to compare with the thousands of data used with classic statistical methods), highly structured, therefore to introduce a maximum of a priori information upstream to the analysis in order the results to be meaningful.
The learner is modeled on the basis of knowledge from the educational science and cognitive neurosciences, including machine learning formalisms, in the very precise framework of a task, named CreaCube, related to initiation to computational thinking presented as an open-ended problem, which involves solving a problem and appealing to creativity.
This document presents these elements and discusses the exploration and exploitation issues, the different goals (for example of performance, speed or mastery of the task), before relating this to the different types of memory and discussing the basics of problem solving, including engaging in a learning activity.
It then describes the very precise construction of an ontology which formalizes this process of task resolution and knowledge construction, taking into account the stimuli received, the discovery of affordances, the setting of hypotheses, clearly distinguished from the notion of belief, without forgetting contextual knowledge.
The production is shared as a free and open resource, and both the implications and the perspectives of this pioneering work of formalizing such a human learning task are discussed in conclusion.
This research report and ontology corresponds to the short Post Doc research work of Lisa Roux, who is also the main author of the document, supervised by Margarida Romero and Frédéric Alexandre and was carried out within the framework of the Aex AIDE project supported by the Otesia Observatory of Technological, Economic and Societal impacts of Artificial Intelligence and Digital Technology.
Key-words: computational thinking, problem solving, ontology, CeaCube, computational educational science.
Développement d’une ontologie
pour l’analyse computationnelle des
observables de l’apprenant
Développement d’une ontologie dans le contexte d’une tâche avec des robots
modulaires
Lisa Roux, Laboratoire d’Innovation et Numérique pour l’Education (LINE) de
l’Université Côte d’Azur
avec l’aide et le conseil de
Margarida Romero, LINE de l’Université Côte d’Azur
Frédéric Alexandre Équipe Mnemosyne Inria, et
Thierry Viéville, Équipe Mnemosyne Inria et LINE de l’Université Côte d’Azur
Table des matières
IA et éducation dans le cadre d’Otesia ...8
Objectifs du document...9
Modélisation de l’apprenant·e ...9
Modélisation de la tâche CreaCube...10
Résoudre des problèmes : entre exploration et exploitation ...13
Relation entre exploration/exploitation et but de performance/maîtrise ...13
Comment caractériser des comportements d’exploration et d’exploitation ?...14
Modélisation de l’apprenant...15
Les différents types de mémoire...15
Bases cognitives de la résolution de problèmes...16
Engagement cognitif dans les activités d’apprentissage...18
Construction des buts...19
Processus de résolution de la tâche et construction des connaissances...21
Les connaissances préalables...21
Les stimuli...22
Les affordances...25
Les hypothèses...26
Les croyances...26
Les connaissances contextuelles...28
L’ontologie du processus de résolution de la tâche...31
Conclusion ...34
Résumé de la contribution...34
Discussion ...34
Perspectives et étapes suivantes...36
Références...37
Annexe : Quels sont les liens entre IA et Éducation ?...39
L'IA comme outil pour mieux apprendre...39
L'IA comme outil pour mieux comprendre comment on apprend...41
L’IA comme sujet et objet d’enseignement...41
Annexe : En quoi notre démarche questionne l’état de l’art ?...42
Annexe : Listes des figures et des tableaux...45
Liste des figures...45
IA et éducation dans le cadre d’Otesia
1Ce travail a été réalisé par le Dr. Lisa Roux2 dans le cadre d’un projet de l’Observatoire des impacts Technologiques, Économiques et Sociétaux de l’Intelligence Artificielle et du numérique (Otesia3) qui participe au à l’action exploratoire Inria Artificial Intelligence Devoted to Education (AIDE4), en collaboration avec le projet de recherche ANR CreaMaker5 (tâche CreaCube) : en lien avec le groupe de travail numérique (GTnum) #Scol_ia6 (IA et éducation) soutenu par la Direction du Numérique Éducatif (DNE) du Ministère de l’Éducation Nationale de la Jeunesse et des Sports (MENJS).
L’intelligence artificielle (IA) est un terme très en vogue au cours de ces dernières années et ce domaine donne lieu à des attentes importantes tant au niveau des contributions aux différents défis éducatifs (personnalisation des apprentissages, engagement de l’apprenant) que des possibilités de traitements liés à l’apprentissage humain, pour contribuer aux grands défis éducatifs de notre société : la réussite pour tou·te·s grâce à la personnalisation des apprentissages, ou encore des aides interactives au cours d’une tâche. Malgré des attentes importantes relativement à l’IA en éducation, plus précisément l’apprentissage machine appliqué à l’amélioration des activités d’apprentissage humain, les usages concrets dans les processus d’enseignement et d’apprentissage restent très limités tant sur le type d’approches mises en place que sur l’impact de ces dispositifs en éducation. On discute des liens entre IA et éducation dans l’appendice de ce document.
Ici, dans le cadre des sciences de l’éducation computationnelles (computational learning sciences), l’application des techniques d’apprentissage machine sont au service de la compréhension des processus d’apprentissage humain. En bref : nous utilisons l’IA pour comprendre l’apprentissage humain, en amont d’outils visant à l’améliorer. Ainsi, les formalismes d’IA sont ici utilisés comme outils pour comprendre l’apprentissage humain7,8. Avec cette visée, le programme de recherche AIDE
1Préambule sur l’IA et Éducation et les objectifs du document par Margarida Romero.
2 La docteure Lisa Roux est postdoc au Laboratoire d’Innovation et Numérique pour l’Education (LINE) de l’Université Côte
d’Azur dans le cadre du projet Artificial Intelligence Devoted to Education (AIDE) financé par Otesia, sous la direction de Margarida Romero et Frédéric Alexandre.
3http://web.univ-cotedazur.fr//institutes/otesia
4https://team.inria.fr/mnemosyne/fr/aide
5https://creamaker.wordpress.com 6
https://frama.link/GTnum-Scolia
7 Nous voulons donc explorer dans quelle mesure des approches ou des techniques issues des neurosciences cognitives
en lien avec l’apprentissage machine et des outils symboliques pour représenter les connaissances, pourraient aider à mieux formaliser l’apprentissage humain tel qu’il est étudié en sciences de l’éducation. Autrement dit : on profite du fait que nous comprenons mieux comment fonctionne notre cerveau pour aider à mieux comprendre comment nos enfants apprennent. Dans ce vaste programme, on se concentre sur l’apprentissage de la pensée informatique, c’est-à-dire ce qu’il faut partager en matière de compétences pour maîtriser le numérique et pas uniquement le consommer ou le subir. Et sur la modélisation de tâches d’apprentissage bien précise.
8 C’est un sujet exploratoire : nous prenons le risque scientifique de regarder les choses autrement. Par exemple, au lieu
vise à combiner des modélisations développées en neurosciences computationnelles, apprentissage machine numérique et symbolique et la modélisation d’une tâche de résolution de problèmes (Romero, Alexandre, Viéville, & Giraudon, 2020). Par cette approche nous visons contribuer à la compréhension de tâches de résolution créative de problèmes.
Dans le cadre de la tâche CreaCube (projet ANR #CreaMaker9) et du programme de recherche Artificial Intelligence Devoted to Education (AIDE10) qui est développé dans le cadre d’une action exploratoire Inria par le biais de la collaboration des équipes Mnemosyne et du laboratoire LINE, l’étude qui est présentée dans ce document correspond au financement d’une action Otesia pour le développement d’une ontologie permettant de modéliser l’activité d’apprentissage en résolution créative de problèmes.
Objectifs du document
Le but de ce document est de présenter la conception d’une ontologie permettant de réaliser une modélisation de la personne apprenante, de la tâche et des observables au cours de l’activité, ceci afin de développer un modèle applicable aux données qui puisse être exploité pour les analyser avec des approches computationnelles.
L’enjeu est ici de travailler à partir d’un relativement petit lot de données (quelques dizaines à comparer aux milliers ou millions de données utilisées avec les méthodes statistiques classiques), fortement structurées, donc d’introduire un maximum d’informations a priori en amont de l’analyse pour permettre que les résultats soient significatifs.
Modélisation de l’apprenant·e
L’apprenant·e est modélisé·e à partir de connaissances issues des neurosciences cognitives. Dans ce cadre, on structure les facultés cognitives humaines selon deux dimensions. La première dimension prend en compte les différentes formes d’association entre entrées sensorielles externes ou internes et les réponses à y apporter, des plus simples (schémas sensori-moteurs, comportements liés aux habitudes) aux plus complexes (comportements dirigés par un but, décisions après délibérations ou raisonnements). La deuxième dimension prend en compte le fait que ces associations peuvent être apprises et exécutées pour quatre différentes classes de motivations (pour aider à identifier un ‘objet’ de l’environnement comme but possible du comportement, pour le localiser ou y prêter attention, pour le manipuler ou encore pour définir en quoi il répond à une motivation). Cette modélisation inscrit ces différents concepts au sein de l’architecture cérébrale, permettant de spécifier ainsi le rôle fonctionnel de ces régions (cortex préfrontal, boucles impliquant les ganglions de la base, incluant l'amygdale, en lien avec le thalamus et l’hippocampe). En explicitant les différentes fonctionnalités
(numérique et symbolique) pour mieux comprendre la façon dont on apprend.
9
Projet ANR CreaMaker https://creamaker.wordpress.com
liées à ces deux dimensions, on rend compte de nombreuses fonctions cognitives, en particulier relatives à la résolution de problèmes. Il s’agit donc d’un cadre de description intéressant car il est structuré, relativement compact et rend compte de ce qui semble s'être développé pour élaborer l’architecture cognitive du cerveau.
Figure 1. Ontologie et modèle de données pour l’étude d’une activité d’apprentissage médiatisée par
des robots pédagogiques (Romero, Viéville & Heiser, 2021).
Modélisation de la tâche CreaCube
Dans le cadre de l’étude #CreaCube1, nous visons l’analyse des stratégies de résolution de problèmes avec des cubes de robotique modulaire, inconnus du participant. La tâche consiste à créer un véhicule autonome pouvant se déplacer d’un point A à un point B. Dans ce contexte, le sujet est donc face à un artefact technologique inconnu, et doit comprendre comment assembler ces cubes pour atteindre l’objectif proposé.
L’exploration créative devrait faciliter la démarche de résolution de problème. Plus précisément, dans cette tâche, l’exploration créative vise à comprendre l’artefact, ses caractéristiques et ses fonctionnalités, afin de pouvoir manipuler l’artefact en vue de résoudre le problème.
1
La tâche est modélisée sur la base des connaissances nécessaires pour la résoudre mais également des états initiaux du matériel et de l’état final pour sa réussite, comme détaillé sur la figure ci-dessous.
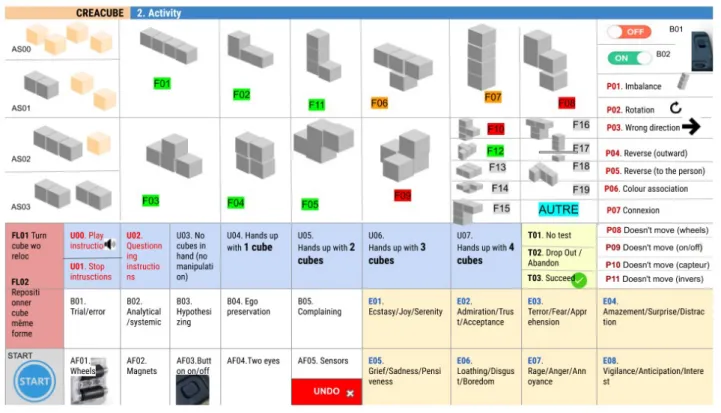
Figure 2. Interface pour l'identification d’observables, cette figure décrit une partie des états du
système à laquelle s’ajoute par exemple, l’identification de chaque cube (reconnaissable par sa couleur : pile bleue marine, capteur noir, moteur blanc, inverseur rouge) et les états des cubes (par exemple "connecté/déconnecté" ou "sur les roues/pas sur les roues"). Cette sous-partie des états possibles correspond aux observables qui ont été choisis pour observer la tâche d’apprentissage humain.
On y voit les différents observables pris en compte, à savoir les configurations possibles des cubes (assemblés d’une manière ou d’une autre, ou pas), la découverte des affordances, c’est à dire des possibilités pratiques offertes par un élément (exemple : il y a un interrupteur, cela peut donc s’allumer), les différents résultats obtenus (par exemple au niveau des mouvements), mais aussi des éléments liés au sujet, comme par exemple ses émotions ou son positionnement (persévérance, abandon) par rapport à la tâche. C’est l’ensemble de ces observables qui va servir de base à la modélisation de la tâche sous forme de connaissances structurées.
Le modèle de fichier généré à partir de cette interface a été développé sous un format hiérarchique typé (syntaxe JSON, avec les données brutes et calculées et la description de chaque type d’information et de leurs relations) pour permettre sa manipulation formelle et représenter au mieux la structure des informations collectées, ceci afin de faire le lien avec des représentations de connaissances liées à la notion informatique d’ontologie comme utilisé au niveau de Web sémantique et intégré sous forme de plateforme interactive pour faciliter l’ergonomie de l’analyse manuelle des vidéo (Romero, Viéville & Heiser, in press). Chaque donnée pour la tâche CreaCube, se présente
comme une séquence temporelle d’états correspondant soit à une configuration de la tâche, soit à un état de l’apprenant dans la tâche comme expliqué plus haut (Figure 2).
Voici un exemple de fichier JSON sur le codage réalisé à partir de l’interface :
{"clicks": [
{"time": "46","click": "AS01"}, {"time": "50","click": "AS02"}, {"time": "58","click": "AS01"}, {"time": "67","click": "AS00"}, {"time": "82","click": "AS01"}, {"time": "93","click": "AS00"}, {"time": "101","click": "AS01"}, {"time": "109","click": "AS02"} ],"idParticipant": "p362"}”
La méthodologie pour générer un ensemble organisé de traces à partir de l’analyse de vidéos est développée en Sciences de l’Éducation et de la Formation (SEF, CNU 70) depuis des années, tant pour l’étude de l’activité d’apprentissage que pour l’analyse des usages. Ces vidéos sont un outil à la fois pour le travail sur les observables et pour la formation (Albero, Guérin, 2014 ; Leblanc, Gaudin, 2020).
Pour permettre l'analyse de l’activité de l’apprenant et du contexte de l’activité d’apprentissage, la description de l’activité d’apprentissage est développée sous la forme d’ontologie. Cela inclut un modèle interne des processus d’apprentissage de l’apprenant. Ce modèle se présente sous forme d'états structurés et hiérarchiques, formalisant toutes les propriétés à prendre compte dans l’activité développée par le participant sur la tâche.
Ainsi, l’observation de l’activité de l’apprenant a pour but de comprendre la manière dont il résout le problème proposé dans le cadre de la tâche. Nous visons en particulier à étudier les modes d’exploration et d’exploitation au cours de la résolution de problèmes, comme expliqué maintenant.
Résoudre des problèmes : entre exploration et exploitation
Dans des activités de résolution de problèmes, les sujets alternent entre deux principaux modes de raisonnement : l'exploration et l’exploitation.
• tandis que l’exploitation est l’usage des connaissances (déclaratives, procédurales) existantes dans une situation donnée.
Si l’on considère la manière d’utiliser les connaissances, soit comme l’implémentation d’idées existantes (usage des connaissances préalables) ou comme génération d’idées (recombinaison de connaissances pour développer une nouvelle idée) nous avons ce que Axtell et collègues (2000) décrivent comme suite :
“Idea generation relates to the behavior of exploration, whereas idea implementation refers to the behavior of exploitation (Axtell et al. 2000)”.
Dans une situation que le sujet reconnaît comme familière, le sujet peut exploiter ses connaissances pour résoudre la situation existante s’il vise un objectif de performance (performance goal). Mais, dans cette même situation, il pourrait également décider d’explorer la situation de manière différente s’il a des buts de maîtrise (mastery goal) ou, même, si au moment de développer une première solution, il avait envisagé plusieurs idées de solution qu’il avait laissées de côté au moment de réussir la situation-problème une première fois.
Dans des situations problèmes, le sujet est face à une incertitude tant en lien à la manière d’arriver au but que sur les moyens pour y arriver. Dans ce cas, les connaissances (déclaratives et procédurales) pour arriver au but ne sont pas clairement structurées et le sujet se doit d’explorer les moyens à sa disposition pour pouvoir développer des connaissances lui permettant de développer une idée de solution.
Relation entre exploration/exploitation et but de performance/maîtrise
Dans l’étude de Marijn Poortvliet et al (2017) les sujets orientés vers la performance interagissent avec d’autres dans le but de s’orienter vers l’exploitation (“performance goals generate an
exploitation orientation toward information exchange”). Bien que dans la tâche CreaCube présentée
dans cette ontologie la modalité soit individuelle, nous pouvons également nous attendre à ce que les buts en matière de performance soient associés à l’exploitation de connaissances, quand celles-ci sont jugées comme pertinentes pour résoudre la tâche.
Si certaines tâches peuvent être résolues sans exploration, juste en exploitant les connaissances actuelles, d’autres requièrent l’exploration. Comme décrit par Curran (2008) la complexité de la tâche est l’un des aspects clés pour la régulation des modes exploration/exploitation pour accomplir la tâche. Les tâches simples nécessitent juste l’exploitation pour performer, cependant, les tâches davantage complexes nécessiteraient l’exploration pour être complétées, nécessitant ainsi de pouvoir combiner les deux modes.
Figure 3. Exploration et exploitation selon la (mé)connaissance des moyens en lien aux objectifs
(Busscher et al 2019).
Dans les tâches complexes, nous pouvons considérer qu’il y a un degré de méconnaissance (unknown) tant sur les objectifs (goals) que les moyens (means), comme décrit par Busscher et al (2019), selon lesquels le choix d’un mode d’exploitation ou d’exploration résulte du jugement de connaissance ou méconnaissance en lien à la combinaison objectifs/moyens dans une situation-problème.
Comment caractériser des comportements d’exploration et d’exploitation ?
Nous visions à caractériser quand l’apprenant est en mode exploration et quand il est en mode exploitation dans le cadre d’une tâche de résolution de problèmes.
Le comportement d’exploitation utilise des connaissances dans une visée de vérification de celles-ci dans la situation-problème. Ainsi, nous attendons que le sujet s’engage dans une mise à l’essai d’une hypothèse (les roulettes permettent de faire bouger le cube) qui lui permettra maintenir ou réfuter l’hypothèse.
Le comportement d’exploration vise à développer des nouvelles connaissances à partir de l’activation d’un répertoire d’actions sur les moyens (recombinaison de connaissances sur le plan conceptuel ou encore actions de type manipulatif auprès du matériel). L’exploration vise la création des nouveaux points de vue (insights) pouvant faire avancer la situation-problème en générant des connaissances nouvelles, recombinées ou qui seraient activés en raison des nouveaux stimuli sensoriels.
Modélisation de l’apprenant
Les différents types de mémoire
En psychologie cognitive, on distingue la mémoire à long terme, qui assure la rétention d’un nombre illimité d’informations sur une longue durée, de la mémoire à court terme, qui nous permet de retenir une quantité restreinte d’informations pendant une courte durée.
On considère généralement trois types de mémoire à long terme pour représenter et décrire la manière dont sont stockés les connaissances et les souvenirs des individus. Tout d’abord, la mémoire sémantique concerne le stockage des connaissances générales sur le monde (i.e. faits, concepts, définition des mots, fonctions et caractéristiques des objets, etc.), qui ne concernent pas l’individu lui-même. Ensuite, la mémoire épisodique porte sur le stockage des faits passés, contextualisés : c’est elle qui permet à l’individu de se souvenir d’événements qu’il a vécus ; ces souvenirs restent situés, puisqu’ils sont toujours associés à des données temporelles (e.g. une date précise, une période), spatiales (e.g. un lieu clairement défini, un décor), émotionnelles (i.e. ce qu’il éprouvait à ce moment-là : il peut s’agir d’une émotion qu’il peut très précisément revivre, ou encore une sensation diffuse). Enfin, la mémoire procédurale correspond à notre savoir-faire, nos capacités motrices, nos gestes usuels : elle nous permet de nous rappeler comment faire un geste ou un ensemble, une suite de gestes, sans avoir à y penser consciemment. Contrairement aux deux types précédents, la mémoire procédurale est dite « non déclarative » car elle est implicite, n’a pas besoin d’être traduite en mots.
Quant à la mémoire à court terme, la notion a progressivement été troquée pour celle de mémoire de travail dès les années 70, cette dernière n’étant pas simplement considérée comme un système de stockage transitoire des informations, mais également un système de traitement. Lorsqu’un individu tente de résoudre un problème, il manipule et stocke provisoirement des informations. La notion de mémoire opérationnelle, proche de celle de mémoire de travail, a également été introduite afin d’insister sur l’importance des objectifs de la tâche : la mémoire opérationnelle permet de conserver les informations utiles aux traitements impliqués dans la réalisation de la tâche, en les mettant à jour au fur et à mesure de la progression.
Les informations entrantes et les stimuli sont encodés dans les aires sensorielles tant qu’ils sont présents (ce qu’on pourrait appeler la mémoire sensorielle immédiate). S’ils sont directement utiles à la tâche, ils peuvent être stockés temporairement en mémoire de travail (ou opérationnelle). Pour les mémoires à plus long terme, on pourra retrouver une trace des événements passés dans leur contexte en mémoire épisodique, qui pourront éventuellement être consolidés en traces plus définitives en mémoire sémantique (le savoir que) ou en mémoire procédurale (le savoir-faire). Les différents éléments d’information à disposition pour résoudre un problème sont donc cette mémoire sensorielle immédiate, la trace utile qu’on en conserve en mémoire de travail et le recours éventuel à la mémoire d’épisodes récents ou à des connaissances et des savoir-faire établis. Il faut également noter qu’à plus long terme, ces passages de mémoires à court terme vers le long terme, ainsi que la consolidation en mémoires sémantique et procédurale peut faire varier ce bagage mnésique et donc notre expérience.
Bases cognitives de la résolution de problèmes
Si la résolution de problèmes est reconnue comme l’une des compétences les plus importantes de la société d’aujourd’hui, il existe une diversité d’approches pour son étude1. À partir d'une théorie du traitement de l'information du raisonnement humain, la résolution de problèmes a été considérée comme un processus qui peut être modélisé comme un ensemble d'états et un chemin pour atteindre le but, ou état cible, à partir des conditions initiales et tenant compte des contraintes du problème posé. Dans ce contexte, Newel considère l'espace des problèmes comme «l'unité organisationnelle fondamentale de toute activité symbolique humaine orientée vers un but2» (1981, p. 696) et il définit un problème dans un espace problème (problem space) comme «un ensemble d'états initiaux, un ensemble d' états d'objectif et un ensemble de contraintes de chemin. Le problème est de trouver un chemin à travers l'espace qui commence à n'importe quel état initial, ne passe que le long de chemins qui satisfont les contraintes de chemin et se termine à n'importe quel état de but3» (p. 695). Cette approche est à rapprocher aux mécanismes de résolution de trajectoire dans un espace d’état . La résolution de problèmes a également été envisagée dans les approches socioculturelles, comme la théorie de l'activité. Dans cette perspective, dans les activités de résolution de problèmes, les tensions initiales d'une situation problématique conduisent à une dissonance cognitive entre motivations conflictuelles et instruments pour atteindre l'objectif d'activité (Sannino & Laitinen, 2015) qui développe une approche de l'analyse d'un appareil décisionnel (Viéville, 2002, Connolly & Grupen, 1994). En théorie de l’activité4 (Engestrom, 2000 ; Kaptelinin & Nardi 2006), l’appareil décisionnel (Sannino & Engeström, 2018) correspond à un système qui requiert une mise en tension par rapport à la situation problématique. Malgré la distance épistémologique entre les approches socio-culturelles comme la théorie de l’activité et les approches cognitives sur lesquelles sont basés la plupart des travaux en neurosciences computationnelles, la théorie de l’activité apporte des éclairages d’intérêt sur le système d’activité humaine, dont l’appareil décisionnel.
Afin d'étudier la résolution de problèmes d'une manière qui puisse résonner dans la diversité des approches de résolution de problèmes au niveau de l'interaction, le cadre PISA pour la résolution de problèmes (OCDE, 2013) a été développé pour fournir un cadre général. La résolution de problèmes est considérée dans le cadre du PISA comme un processus dans lequel elle est généralement développée en quatre étapes non linéaires. La première composante de la résolution de problèmes est liée à la capacité à identifier les composantes d'une situation et leur structure (analyse / représentation), que certains auteurs appellent l'identification de problème. Le deuxième élément est la capacité d'organiser et de modéliser efficacement la situation (organiser / modéliser). Le troisième volet s'est engagé dans la création de la solution et le quatrième sur la capacité à s'engager dans le processus d'évaluation et itératif d'amélioration de la solution. Ces quatre composantes ne sont pas linéaires et séquentielles mais elles peuvent être développées de manière itérative et non linéaire,
1 Texte adapté à partir d’un chapitre à paraître (Romero, Freiman, & Rafalska, 2021).
2 Traduction propre de “fundamental organizational unit of all human goal oriented symbolic activity” (Newell, 1981, p.
696).
3
Traduction propre de “a set of initial states, a set of goal states, and a set of path constraints. The problem is to find a path through the space that starts at any initial state, passes only along paths that satisfy the path constraints, and ends at any goal state” (Newell, 1981, p. 695).
spécialement dans des situations de résolution de problèmes complexes nécessitant une réduction du problème d'espace à travers différentes itérations. Nous pouvons trouver des similitudes avec vision heuristique de la résolution de Polya (1945), qui se déroule en quatre étapes :
1. Comprendre le problème 2. Concevoir un plan
3. Mettre le plan à exécution 4. Examiner la solution
Zelazo et coll. (1997) considèrent des processus similaires dans la résolution de problèmes, y compris la définition et la représentation du problème mentalement, le développement d'une stratégie de solution, le suivi ou la régulation des progrès de la résolution de problèmes et l'évaluation de la solution. Bien que Zelazo et coll. (1997) n'identifient pas explicitement le processus itératif d'amélioration de la solution, celui-ci est intégré dans l'évaluation de la solution décrite dans leur quatrième composante. Brand-Gruwel et coll. (2005) observent qu'un plus grand nombre de résolveurs de problèmes experts consacrent plus de temps à l'analyse du problème, identifient les principales composantes de la situation et investissent dans la définition du problème et activent les connaissances préalables liées à la situation, mais aussi régulent mieux leur processus, tandis que les résolveurs de problèmes plus novices consacraient moins de temps à l'analyse du problème. Avoir des connaissances préalables nous permet de mieux identifier le problème et d'utiliser les connaissances pertinentes existantes pour résoudre le problème. Cependant, lorsque les connaissances antérieures ne sont pas appropriées pour la tâche, il est nécessaire d'inhiber les connaissances antérieures et les premières idées de solution, ce qui obligera l'apprenant à être conscient de la nécessité d'inhiber la représentation initiale de la solution.
Avoir un certain domaine de connaissance peut «agir comme un ensemble mental, favorisant la fixation dans les tentatives créatives de résolution de problèmes5» (Wiley, 1998, p. 716). La prise de conscience des connaissances actuelles et de la pertinence du processus pour une certaine situation fait partie des jugements métacognitifs que l'apprenant devrait développer dans un processus créatif de résolution de problèmes lorsque la génération d'idées devrait conduire à l'identification des meilleures idées pour une certaine tâche, à l'inhibition de celles qui ne sont pas appropriés pour résoudre le problème et à la génération d'idées nouvelles pour atteindre l'objectif de résoudre le problème.
Engagement cognitif dans les activités d’apprentissage
dépasser la dichotomie apprentissage passif vs actif L’encodage d’une information est d’autant plus fiable et profond que le sujet porte une grande attention à ce qu’il est en train d’apprendre. C’est pourquoi l’engagement cognitif dans les activités d’apprentissage est important. Le degré d’engagement dans les activités d’apprentissage a souvent été traité en sciences de l’éducation et de la formation (SEF) comme étant soit passif (l’apprenant écoute l’enseignant) ou actif (l’apprenant réalise une activité de production de connaissances). Cependant, cette distinction est insuffisante car il faut considérer les différents degrés d’engagement cognitif sur l’activité. Dans ce contexte, le modèle ICAP développé par Chi (2009) a pour objectif de
5 Traduction propre de “act as a mental set, promoting fixation in creative problem-solving attempts” (Wiley, 1998, p.
différencier quatre niveaux d’engagement cognitif dans les activités d’apprentissage : passif, actif, constructif et interactif (I > C > A > P).
Figure 4. Modèle ICAP de Chi et Wylie (2014), design par Kaneb Center6.
Le modèle ICAP (Chi & Wylie, 2014) permet d’avancer dans la caractérisation des tâches selon l’engagement cognitif. Dans la visée de permettre de caractériser l’engagement créatif de l’apprenant dans les usages du numérique nous avons adapté le modèle ICAP. Ainsi, le modèle passive-participatory (Romero, Laferrière, & Power, 2016) a pour but de caractériser l’activité de l’apprenant selon son engagement créatif dans son usage du numérique.
Figure 5. Modèle Passive-Participatory7.
6https://kaneb.nd.edu/assets/286638/icap_framework_summary.pdf 7
L’objectif de ces modèles est de permettre de prendre conscience que l’activité de l’apprenant d’un point de vue de l’engagement cognitif et de l’engagement créatif est différent selon le potentiel d’engagement de la tâche prescrite mais aussi de l’engagement effectif de l’apprenant sur la tâche.
Construction des buts
Afin de progresser dans sa tâche, l’apprenant fixe des buts. Son but général est de réaliser la tâche, ce qui, après avoir écouté la consigne et découvert les cubes, se traduit concrètement en la réalisation, à partir de quatre cubes, d’un véhicule qui se déplace de manière autonome du point rouge vers le point noir. Ce but pourra ensuite se décliner en plusieurs sous-buts, qui, pour être atteints, nécessiteront eux-mêmes de définir de nouveaux sous-buts. Les buts et leurs sous-buts se déploient ainsi en arbres qui se dessinent au fil des stimuli et des expériences, qu’il faudra toujours remonter pour réaliser les buts finaux. Ces buts sont liés aux fonctions cognitives de l’apprenant, combinées entre elles à travers des circuits associatifs : en réalisant sa tâche, l’apprenant est toujours concerné par des buts, et pour chacun, son importance, la manière employée pour l’atteindre, et sa localisation : ils permettent tous de prendre des décisions dans le cadre de la résolution de problèmes et sont constamment mobilisés pour organiser le comportement. Par exemple, lorsque l’apprenant veut découvrir à quoi sert le cube bleu, il s’agit d’un but. Il définit pour cela un sous-but : manipuler un cube. Il sait qu’il va devoir auparavant le saisir ; c’est un nouveau sous-but. Il commence alors par le chercher des yeux : le localiser sur la table constitue un autre sous-but. Le trouver est une condition nécessaire à la préhension, qui est elle-même une condition nécessaire à la manipulation, sans laquelle l’examen n’est pas possible.
On compte deux types de modèles de comportement :
• le modèle goal-driven (ou approche descendante (top-down), qui débute par des actions virtuelles : c’est à partir des buts que je déroule un plan pour accéder à mes buts. Par exemple, c’est parce que je veux manipuler le cube bleu que je prévois de le saisir préalablement.
• le modèle stimulus-driven (ou approche ascendante (bottom-up) ; ce sont les stimuli qui motivent mon action. Par exemple, c’est parce que je vois un interrupteur sur le cube bleu que je prévois de l’activer.
Figure 6. Exemple de comportements stimulus-driven et goal-driven (Belkaid, Cuperlier & Gaussier,
Prenons l’exemple de la modélisation robotique d’une tâche de recherche visuelle comme celle analysée par Belkaid, Cuperlier et Gaussier (2017) à partir de différents objets situés à différents endroits. Dans cette tâche, “les participant·e·s doivent typiquement trouver des cibles (par exemple des carrés et des triangles) dans une scène visuelle comprenant également des distracteurs visuels (par exemple des étoiles). Le protocole peut imposer que le participant·e effectue une action lorsqu'une cible est reconnue (par exemple, appuyez sur le bouton correspondant8” (p. 5). Sur l’exemple de comportement stimulus-driven représenté dans la figure 6 à gauche “l'attention ascendante est motivée par un stimulus, ce qui signifie qu'elle dépend de la saillance inhérente des objets dans la scène et de leur capacité à attirer l'attention du sujet” (ibid). Sur le comportement goal-driven à droite, “l'attention du haut vers le bas est dirigée vers un objectif et motivée par l'effort du sujet pour concentrer son attention sur une zone ou des objets particuliers” (ibid).
On voit bien, en évoquant ces différentes tâches, leur relation avec les bases cognitives de résolution de problèmes évoquées plus haut. À un niveau local, pour chaque tâche (par exemple, attraper un cube pour vérifier son rôle), il y a bien conception et exécution d’un plan (le localiser, le saisir, l’observer, le manipuler), qui permet de tirer des conclusions sur l’hypothèse qui était en cours de validation. A un niveau global, il faut rattacher ce processus local au processus global de résolution du problème, c’est à dire dans le cas goal-driven se souvenir, dans le plan global, quel sous-but ce processus local permettait de traiter (et quelle implication sur le plan global a le résultat local obtenu) et, dans le cas stimulus-driven, voir ce que suggère le résultat du processus local sur l’organisation et la remise en cause éventuelle du plan global. Il y a donc bien alternativement des activités locales permettant d’explorer l’espace des tâches et de gagner de l’information et des remises en perspectives globales permettant d’inscrire ces avancées locales dans la résolution du problème dans son ensemble.
Processus de résolution de la tâche et construction des
connaissances
Les connaissances préalables
Pour accomplir la tâche, l’apprenant utilise des connaissances dont il disposait avant la tâche ; il s’agit de connaissances ayant été acquises au cours d’expériences et d’apprentissages passés, et qui, si elles ne sont pas toutes absolument généralisables, peuvent dans certains cas être transférables à d’autres situations. Il s’agit là notamment de connaissances stockées dans la mémoire sémantique. Par exemple, le fait que les roues, sur un véhicule, doivent être en contact avec le sol pour lui permettre de se déplacer est une connaissance générale, c’est-à-dire qu’elle est vraie pour tous les 8 Traduction propre du texte : “Types of attentional processes in a visual search task. In this task, the participants
typically have to find targets (e.g. squares and triangles) in a visual scene also comprising visual distractors (e.g. stars). The protocol can require the participant to perform an action when a target is recognized (e.g. press the corresponding button. LEFT: Bottom-up attention is stimulus-driven, meaning it depends on the inherent saliency of the objects in the scene and their capacity to draw the subject's attention. RIGHT: Top-down attention is goal-directed and driven by the subject's effort to focus attention on a particular area or objects” https://doi.org/10.1371/journal.pone.0184960.g002 .
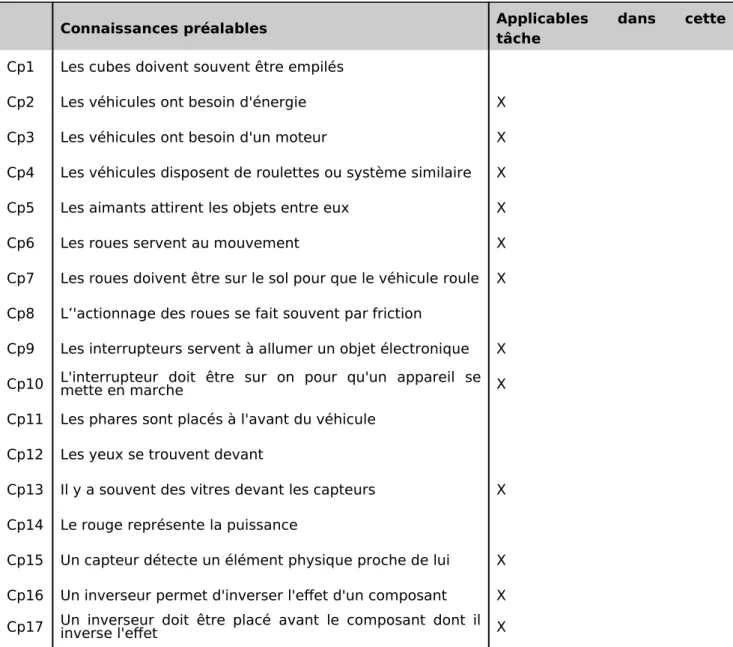
véhicules à roues. Le fait que les roues se mettent à tourner automatiquement vers l’avant après que son utilisateur a appuyé sur le véhicule en le faisant rouler en arrière, n’est applicable que dans certaines situations – le plus souvent, ce mécanisme a été mis en place pour les petites voitures destinées aux enfants. Dans ces deux exemples, la première est applicable dans la tâche : il est vrai que les roues du cube blanc doivent être placées sur le sol pour que le véhicule se mette en marche. A l’inverse, la deuxième ne l’est pas : s’efforcer d’appuyer sur le cube blanc en le faisant rouler manuellement dans un sens ne le fera pas avancer de manière autonome dans l’autre. Il se pourrait même que cette connaissance, si elle est trop fortement ancrée (i.e. si l’apprenant la croit généralisable alors qu’elle n’est valable que dans un ensemble de situations limité), fasse obstacle à la réalisation de la tâche : tant qu’il continuera à essayer de faire fonctionner les roues de cette manière, il ne poursuivra pas ses recherches. Le tableau 1 recense certaines connaissances préalables utilisées par l’apprenant lors de la tâche, en précisant si elles sont applicables dans cette situation précise ou non.
Tableau 1. Connaissances préalables généralisables ou pouvant être appliquées dans plusieurs
situations.
Connaissances préalables Applicables dans cette
tâche
Cp1 Les cubes doivent souvent être empilés Cp2 Les véhicules ont besoin d'énergie X Cp3 Les véhicules ont besoin d'un moteur X Cp4 Les véhicules disposent de roulettes ou système similaire X Cp5 Les aimants attirent les objets entre eux X Cp6 Les roues servent au mouvement X Cp7 Les roues doivent être sur le sol pour que le véhicule roule X Cp8 L’'actionnage des roues se fait souvent par friction Cp9 Les interrupteurs servent à allumer un objet électronique X Cp10 L'interrupteur doit être sur on pour qu'un appareil semette en marche X Cp11 Les phares sont placés à l'avant du véhicule Cp12 Les yeux se trouvent devant Cp13 Il y a souvent des vitres devant les capteurs X Cp14 Le rouge représente la puissance Cp15 Un capteur détecte un élément physique proche de lui X Cp16 Un inverseur permet d'inverser l'effet d'un composant X Cp17 Un inverseur doit être placé avant le composant dont ilinverse l'effet X
Ces connaissances générales ne sont pas toutes nécessaires à la résolution du problème, puisque l’apprenant peut tout aussi bien mener une stratégie d’exploration plutôt que d’exploitation. En outre, il peut construire empiriquement certaines de ces connaissances, par exemple lorsque l’une peut être déduite de l’autre.
Les stimuli
Lors de la réalisation d’une tâche, les individus explorent leur environnement, découvrent et manipulent les ressources dont ils disposent, interprètent les divers éléments qui apparaissent à différentes étapes du déroulé contrôlé de la tâche ou de leurs expériences. Ces stimuli, envoyés par l’environnement, sont des événements qui provoquent une réaction organique de l’apprenant. Ils modifient ponctuellement ou durablement la situation initiale de l’environnement en introduisant des éléments nouveaux, et ce sont ces variations qui stimulent l’organisme.
Dans CreaCube, les différents stimuli sont de nature sensorielle et donnent à l’apprenant de nouvelles informations sur l’environnement matériel de la tâche ; ces informations pourront ensuite être traitées par l’apprenant pour constituer des données avant de devenir des connaissances, à partir du processus suivant :
• on perçoit des stimuli,
• on en sélectionne certains (lors d’une phase d’exploitation ou d'exploration, par un mécanisme de focalisation d’attention),
• on les traite en mémoire de travail c’est à dire qu’ils sont encodés sous forme d’activité soutenue qui permet de les garder présents à l’esprit au cours de la tâche même s’ils ne sont plus directement perçus. Ils deviennent alors des données du problème,
• on les passe en mémoire épisodique (ainsi, on se souvient alors y avoir eu recours et on se souvient du résultat correspondant), ce sont alors des traces mémorielles,
• on les passe ensuite (plus tard et en dehors de cette tâche) éventuellement en mémoire sémantique (et vont donc devenir des connaissances).
On fait donc la distinction entre stimuli (ce qu’on perçoit) et données (des faits ou des traces de stimuli que l’on maintient actif au cours de la tâche car ils nous seront utiles ultérieurement) par rapport aux connaissances (qui peuvent être des souvenirs explicites d’événements passés en mémoire épisodique ou des faits généraux consolidés en mémoire sémantique) qu'on explicite ailleurs dans ce document.
Certains stimuli apparaissent à des moments prédéfinis, des étapes précises de la tâche ; ils ne sont pas le résultat d’un comportement de l’apprenant. Par exemple, la lecture de la consigne intervient en tout début de tâche, induisant un stimulus auditif. D’autres stimuli surviennent lorsque l’apprenant interagit pro-activement avec son environnement ; c’est notamment le cas lorsqu’il appuie sur l’interrupteur : l’allumage de la diode est une réponse de l’environnement matériel à une action de l’apprenant. Le tableau 2 recense les différents stimuli intervenant au cours de la tâche CreaCube, et donnant des informations sur l’environnement matériel.
Modifications de l'environnement matériel Description du stimulus Action(s) à l'origine du stimulus
Situation initiale Environnementmatériel non modifié
Pas de consigne Drap recouvrant les
cubes
Stimuli apparaissant à
des moments prédéfinis
Stimulus auditif S1 Entente de la consigne Lecture de la consigne Stimulus visuel S2 Cubes dévoilés Levée du drap
Stimuli résultant de
l'interaction proactive de l'apprenant avec l'environnement
matériel
Stimulus visuel Sm Apparition des aimants Observer les cubes oumanipuler un cube Stimulus visuel Sr1 Apparition des rouessur le cube blanc Manipuler du cubeblanc Stimulus visuel Sr2 Les roues tournent Toucher les roues Stimulus visuel Sr3] Le cube blanc roule Faire rouler le cubeblanc manuellement
sur la table
Stimulus visuel Sr4 Le cube blanc restestatique Essayer de faire roulerle cube blanc par rétrofriction
Stimulus visuel Sinv1 Le cube rouge a desaimants sur toutes ses faces
Manipuler le cube rouge
Stimulus visuel Sint1 Le cube bleu a uneface sans aimants Manipuler le cube bleu Stimulus visuel Sint2 Le cube bleu a uninterrupteur Manipuler le cube bleu Stimulus visuel Sint3 Une diode s'allume Appuyerl'interrupteur sur Stimulus visuel Scapt1 Le cube noir a une facesans aimants Manipuler le cube noir Stimulus visuel Scapt2 Le cube noir a deuxcercles sur une face Manipuler le cube noir
Stimulus visuel
StestConnex1 Le cube rouge s'allume
Appuyer sur l'interrupteur ET connecter les cubes rouge et bleu
Stimulus visuel
StestConnex2 Le cube noir s'allume
Appuyer sur l'interrupteur ET connecter les cubes noir et bleu
Stimulus visuel
StestConnex3 Le cube blanc s'allume
Appuyer sur l'interrupteur ET connecter les cubes blanc et bleu
Stimulus visuel Stest1 La figure roule
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Stimulus visuel Stest2 La figure semble
sol ET appuyer sur l'interrupteur
Stimulus visuel Stest3 La figure ne va pasdans la bonne direction
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Stimulus visuel STest4 Laimmobilefigure reste
Connecter les cubes ET poser les roues face au sol (ET appuyer sur l'interrupteur)
Stimulus visuel STest5 La figure va dans labonne direction
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Stimulus visuel STest6 La figure tombe
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Stimulus visuel STest7 La figure tourne
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Stimulus auditif
STests8 Le moteur fait du bruit
Connecter les cubes ET poser les roues face au sol ET appuyer sur l'interrupteur
Les affordances
En explorant son environnement matériel, l’apprenant y découvre des potentialités, en lien avec les connaissances générales préalables dont il dispose, on parle d’affordances. On distingue les affordances perceptibles, directement suggérées par des informations sensibles obtenues à travers la découverte des objets, des affordances fonctionnelles, découvertes lors de l’interaction d’un objet avec d’autres. Par exemple, lorsqu’il explore le cube blanc et trouve les roues, il s’agit d’une affordance perceptible visuelle : l’apprenant découvre à ce cube la potentialité de la motricité, en lien avec la connaissance Cp6. A l’inverse, le cube rouge n’ayant pas d’affordances visuelles spécifiques (i.e. il n’y a rien, à sa surface, qui vient manifester son utilité pour la tâche à accomplir), c’est en le manipulant au sein du système composé de tous les cubes que l’apprenant peut comprendre sa fonctionnalité et son principe de fonctionnement.
Ces affordances participent à la construction des traces mémorielles, puisque ce sont elles qui lui permettent de découvrir, peu à peu, son environnement matériel et sa logique, afin de savoir comment l’employer pour résoudre le problème auquel il est confronté. Dans la tâche CreaCube, les affordances perceptibles sont toutes visuelles. L’arbre “Apparition des affordances” présente comment apparaissent les différentes affordances au cours de cette tâche.
Figure 7. Affordances visuelles et fonctionnelles de la tâche CreaCube.
Les hypothèses
Pour résoudre un problème, l’apprenant s’engage sur plusieurs processus d’exploration et d'exploitation des connaissances (préalables ou générées au cours de la tâche). Quand le sujet est dans un processus d’exploitation, il émet des hypothèses sur l’environnement, ses contraintes, ses possibilités, et ses ressources, qu’il cherchera à vérifier en menant des tests. Ces hypothèses deviendront ensuite la représentation courante de la scène, et seront maintenues en mémoire de travail si elles se trouvent vérifiées.
Formuler des hypothèses permet d’établir une stratégie1 : connaissant son but, il se fait une idée des moyens qui lui permettraient d’y parvenir, à partir de ses connaissances conceptuelles et de ses souvenirs ; c’est donc en investissant sa mémoire sémantique et épisodique qu’il construit des attentes sur les ressources qu’il pourrait employer, et donc des hypothèses sur son environnement matériel. Il se crée ainsi des sous-buts, à partir de ce qu’il pense devoir chercher, qui lui permettent d’organiser sa recherche. Par exemple, sachant qu’il doit construire un véhicule qui se déplace sur la table, il peut imaginer spontanément avoir besoin de roues, et construit l’hypothèse : « il y a un cube avec des roues ». Il mobilise pour cela son expérience personnelle et ses connaissances sur les véhicules terrestres. De même, il élabore des hypothèses à partir des affordances qui émergent de ses interactions avec l’environnement – car ces affordances sont des potentialités de l’objet en mains, il faut s’assurer qu’il ne s’agit pas d’affordances trompeuses (ex : affordances suggérant une action pouvant être effectuée par ou au moyen de l’objet) ou d’une mauvaise interprétation. Ainsi, lorsqu’il
1 Une stratégie peut être comprise comme une combinaison de connaissances et d'actions à mettre en place pour
voit les cercles sur le cube noir, il peut faire l’hypothèse qu’il s’agit d’yeux ou de phares, d’où suivra spontanément une deuxième hypothèse : ce cube doit être situé à l’avant du véhicule, la face avec les cercles orientée dans le sens de la marche. Enfin, l’absence même d’affordances peut donner lieu à la formulation d’hypothèses, comme lorsque l’apprenant émet l’idée que le cube rouge puisse n’avoir aucune fonction.
Les croyances
Lorsqu’il explore son environnement matériel, le sujet peut fonder des croyances erronées. Dans la réalité, les croyances sont des processus mentaux à travers lesquels un individu considère un fait, une idée, une hypothèse, comme étant vrais, sans qu’il y ait de preuve venant confirmer cette certitude de manière définitive. Dans ce contexte, une croyance peut être vraie ou fausse : le fait de croire ou de ne pas croire ne dit rien quant à la vérité de l’objet concerné. Ce qui distingue la connaissance de la croyance en une chose vraie, c’est précisément l’impossibilité d’une preuve dans le second cas : tant qu’il est impossible de prouver que ce en quoi je crois est vrai, et donc d’être certain que c’est vrai, la croyance ne peut pas devenir une connaissance. Bien entendu, par rapport aux connaissances (par exemple que la Terre est ronde), nous ne détenons pas la preuve nous-même, mais nous nous en remettons à une autorité de confiance, en laquelle… nous croyons. La croyance est également différente de l’hypothèse puisque, dans la croyance, on tient la chose pour définitivement vrai. Par exemple, on suppose que la Terre est plate quand on considère des déplacements de quelques kilomètres, cette hypothèse simplificatrice étant bien pratique.
Dans le contexte de la tâche CreaCube, nous savons de manière certaine ce qui, parmi les différentes croyances de l’apprenant, est vrai ou non – nous savons donc quelles croyances sont des connaissances. Ainsi, nous ne nommons « croyances » que les conclusions erronées qu’il tire d’une expérience. Ces croyances peuvent faire obstacle à la résolution du problème puisqu’il fait erreur en pensant acquérir de nouvelles connaissances sur son environnement matériel. Il peut alors choisir d’interrompre son examen d’un élément qu’il croit connaître.
Tableau 3. Construction des croyances erronées.
Nom Croyance Connaissance Objet
concerné Connaissance/ Croyance sur laquelle se fonde le raisonnement
CroyCoul Il y a deux cubes noirs, un cube rouge, un cube blanc
Il y a un cube noir, un cube bleu, un cube rouge, un cube blanc Cube bleu
CroyR Les roues fonctionnent par rétro-friction
Il y a un circuit électrique qui passe entre tous
les cubes lorsqu'ils sont connectés et qui fait fonctionner le moteur
CroyInv1 Le cube rouge n'a pas de fonctionnalité
Le cube rouge
est un inverseur Cube rouge Cp29
CroyInv2 Le cube rouge est le moteur
Le cube rouge est un inverseur OU Le moteur est dans le cube blanc
Cube rouge Cp14
CroyInt1 Le cube bleu n'a pas d'affordances visuelles
Le cube bleu a
un interrupteur Cube bleu
CroyInt2 Un des cubes noirs n'a pas d'affordances visuelles Il y a un cube bleu et un cube noir ET le cube bleu a un interrupteur
Cube bleu CroyCoul
CroyInt3 Le cube bleu n'a pas de fonctionnalité
Le cube bleu sert à allumer le véhicule
Cube bleu CroyInt1
CroyCapt1 Le cube noir n'a pas d'affordances visuelles
Le cube noir a un
capteur Cube noir
CroyCapt2 Un des cubes noirs n'a pas d'affordances visuelles
Il y a un cube bleu et un cube noir ET le cube noir a un capteur
Cube noir CroyCoul
CroyCapt3 Le cube noir n'a pas de fonctionnalité
Le cube noir sert à ordonner le mouvement à travers la réponse envoyée par son capteur
Cube noir CroyCapt1
Les connaissances contextuelles
Lorsque nous effectuons une tâche, nous établissons de nouveaux faits, qui pourront alors former des connaissances contextuelles ultérieures ; certains de ces faits correspondent à des données généralisables, et pourront s’appliquer à des situations diverses, tandis que d’autres sont exclusivement liés au contexte spécifique du problème que nous sommes en train d’essayer de résoudre. Par exemple, dans la tâche CreaCube, le fait que nous disposions de quatre cubes pour construire un véhicule est spécifique à cette tâche. Il s’agit donc de connaissances contextuelles, qui pourront être effacées de notre mémoire dès que la tâche aura pris fin, mais qui sont essentielles pour la mener à bien. Parmi elles, certaines sont acquises lorsque l’apprenant écoute la consigne et sont directement liées au but ; c’est à travers elles qu’il sait ce qu’il doit faire précisément et qu’il peut évaluer sa progression au fur et à mesure de l’avancement de la résolution du problème. D’autres connaissances contextuelles sont construites au cours de la tâche et concernent le matériel
mis à disposition pour l’accomplir. C’est à travers des activités d’observation, de manipulation, de tests, que l’apprenant les acquiert progressivement, en découvrant aux quatre cubes des propriétés, des affordances, et des fonctionnalités, des similitudes et des différences. Les connaissances liées au but sont répertoriées dans le tableau 4, et les connaissances liées au matériel dans le tableau 5. L’arbre B permet de comprendre comment se construisent les connaissances liées au matériel, à partir des connaissances générales préalables et de connaissances contextuelles en lien au but.
Tableau 4. Connaissances contextuelles en lien au but.
N° Connaissances en lien avec le but
Cb1 Le véhicule doit bouger
Cb2 Le véhicule est composé de quatre cubes
Cb3 Le véhicule doit se déplacer d'un point rouge à un point noir
Tableau 5. Connaissances contextuelles construites lors de la résolution du problème. N° Connaissances contextuelles construites pour résoudre la tâche
Cc1 Les quatre pièces évoquées par la consigne sont les cubes présents sur la table Cc2 Les cubes ne sont pas tous du même poids
Cc3 Chaque cube a une couleur
Cc4 Les cubes sont chacun d'une couleur différente
Cc5 Il y a un cube bleu, un cube noir, un cube blanc, un cube rouge Cc6 Il y a des magnets sur les faces des cubes
Cc7 Les cubes se connectent lorsqu'on les approche les uns des autres Cc8 Il existe un cube avec des roues
Cc9 Le cube blanc a des roues
Cc10 Le cube blanc a des roues et permet le mouvement du véhicule Cc11 Les roues ne fonctionnent pas par rétrofriction
Cc12 Le cube rouge a des magnets sur toutes ses faces Cc13 Le cube rouge n'a pas d'affordances visuelles
Cc14 Le cube rouge est le seul à ne pas avoir d'affordances visuelles Cc15 Il y a une face sans magnets sur le cube bleu
Cc16 La face sans magnets du cube bleu ne peut être connectée à rien Cc17 Il existe un cube avec un interrupteur
Cc18 Le cube bleu a un interrupteur
Cc19 Le cube bleu a un interrupteur et permet d'allumer le véhicule Cc20 Il y a une face sans magnets sur le cube noir
Cc21 La face sans magnets du cube noir ne peut être connectée à rien Cc22 Il existe un cube avec un capteur
Cc23 Le cube noir a un capteur
Cc24 Le cube noir a un capteur et permet de faire avancer le véhicule
Cc25 Le cube noir s'allume quand il est connecté au cube bleu et que l'interrupteur est en position "on"
Cc26 Le cube blanc s'allume quand il est connecté au cube bleu et que l'interrupteur est en position "on"
Cc27 Le cube rouge s'allume quand il est connecté au cube bleu et que l'interrupteur est en position "on"
Cc28 Les cubes s'allument quand ils sont connectés au cube bleu et que l'interrupteur est en position "on"
Cc29 Il est possible que le moteur soit en marche mais que le véhicule n'avance pas
Cc30 Lorsque les cubes blanc, noir, bleu sont connectés, et que le capteur est directement face au sol, le moteur se met en marche mais le véhicule n'avance pas
Cc31 Lorsque les cubes blanc, noir, bleu sont connectés, et que je passe ma main devant le capteur, le véhicule avance
Cc32 Le fait que le véhicule avance ou non dépend de la distance qui sépare le capteur et l'objet physique le plus proche qui est face à lui
Cc33 Lorsque les cubes blanc, noir, bleu sont connectés, le capteur détecte faiblement les objets proches mais ce n'est pas suffisant pour faire avancer le véhicule
Cc34 Lorsque les cubes blanc, noir, bleu sont connectés, le capteur détecte bien les objets à moyenne distance et le véhicule avance
Cc35 Lorsque les cubes blanc, noir, bleu sont connectés, le capteur ne détecte pas les objets à longue distance et le moteur ne fonctionne pas
Cc36 En ne connectant que le cube des roues et de l'interrupteur, le véhicule n'avance pas Cc37 En ne connectant que les cubes des roues et du capteur, le véhicule n'avance pas Cc38 En ne connectant que deux cubes, le véhicule n'avance pas
intervention
Cc40 En connectant les quatre cubes, il est possible que le véhicule avance mais soit instable Cc41 En connectant les quatre cubes, il est possible que le véhicule avance mais qu'il n'aille pas
en ligne droite
Cc42 En connectant les quatre cubes, il est possible que le véhicule n'avance pas
Cc43 En connectant les quatre cubes, le fait que le véhicule avance ou non dépend de la position du cube rouge
Cc44 Lorsque tous les cubes sont connectés, le capteur détecte assez bien les objets proches et cela est suffisant pour faire avancer le véhicule
Cc45 Lorsque tous les cubes sont connectés, le capteur ne détecte pas les objets à moyenne distance et le véhicule n'avance pas
Cc46 Lorsque tous les cubes sont connectés, le capteur détecte bien les objets à longue distance et c'est là où le véhicule avance le plus vite
Cc47 Pour que le véhicule avance lorsqu'il est composé des quatre cubes, il faut que le cube rouge soit placé avant le cube noir
Cc48 Le cube rouge inverse la manière dont le capteur réagit vis-à-vis de la distance de l'objet physique qui est face à lui
Cc49 Le cube rouge est un inverseur
Cc50 Pour que le véhicule soit stable, il faut que le poids des cubes soit bien réparti autour du cube des roues
Cc51 La figure "tour" n'est pas stable
Figure 8. Construction et dépendance des connaissances.
L’ontologie du processus de résolution de la tâche
Dans l’ontologie, comme on peut le voir dans Figure 1, on définit en premier lieu deux grands éléments : l’apprenant et le matériel. L’apprenant effectue des actions, à des fonctions cognitives, des buts, des connaissances, formule des hypothèses, et reçoit des stimuli. Le matériel concerne des objets (cubes, figure(s), points), qui ont des caractéristiques (couleurs des cubes, affordances visuelles et fonctionnelles, fonctions, etc.) et des états (cube assemblé/désassemblé, roues face au sol/pas face au sol, interrupteur sur ON/sur OFF, figure complète/incomplète, etc.)
Figure 9. Arbre des classes.
Ces éléments ont des propriétés définissant les rapports qu’ils entretiennent les uns avec les autres. Comme on peut le voir figure 2, pour une partie, les objets matériels ont tous des états (e.g. une figure peut être en mouvement ou immobile, stable ou instable) et des caractéristiques, qui peuvent