HAL Id: tel-03173235
https://tel.archives-ouvertes.fr/tel-03173235
Submitted on 18 Mar 2021
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Etude expérimentale et modélisation de la réponse
mécanique de la glace polycristalline sous chargement de
traction dynamique : Influence de la porosité
David Georges
To cite this version:
David Georges. Etude expérimentale et modélisation de la réponse mécanique de la glace
poly-cristalline sous chargement de traction dynamique : Influence de la porosité. Mécanique des solides
[physics.class-ph]. Université Grenoble Alpes [2020-..], 2020. Français. �NNT : 2020GRALI080�.
�tel-03173235�
THÈSE
Pour obtenir le grade de
DOCTEUR DE L’UNIVERSITE GRENOBLE ALPES
Spécialité : 2MGE : Matériaux, Mécanique, Génie civil,
Electrochimie
Arrêté ministériel : 25 mai 2016
Présentée par
David GEORGES
Thèse dirigée par Maurine MONTAGNAT-RENTIER, Directrice de recherche, CNRS et codirigée par Pascal FORQUIN, Professeur, UGA et co-encadrée par Dominique SALETTI, Maître de conférence, UGA préparée au sein de L’institut des Géosciences et de l’Environnement et du Laboratoire Sols, Solides, Structures, Risques
dans l'École Doctorale I-MEP2 - Ingénierie - Matériaux, Mécanique,
Environnement, Energétique, Procédés, Production
Étude expérimentale et modélisation de la
réponse mécanique de la glace polycristalline
sous chargement de traction dynamique :
Influence de la porosité
Thèse soutenue publiquement le 18 décembre 2020, devant le jury composé de :
Monsieur, Gioacchino VIGGIANI
Professeur des universités, UGA, Président
Madame Patricia VERLEYSEN
Professeur, Ghent University, Rapportrice
Monsieur Philippe VIOT
Professeur des universités, ENSAM, Rapporteur
Monsieur Michel BORNERT
Ingénieur en Chef des Ponts, Eaux et Forêt, École des Ponts ParisTech, Examinateur
Madame Armelle PHILIP
Maître de conférence, UGA, Examinatrice
Madame Maurine MONTAGNAT-RENTIER
Directrice de recherche, CNRS, Directrice de thèse, Examinatrice
Monsieur Pascal FORQUIN
Professeur des universités, UGA, Co-directeur de thèse, Examinateur
Monsieur Dominique SALETTI
Résumé
Les impacts de grêlons peuvent induire de sérieux dégâts sur les aéronefs, allant jusqu’à menacer l’intégrité même de la structure. Afin de concevoir des structures résistantes à ces impacts, il est dans un premier temps nécessaire de modéliser efficacement la réponse mécanique de la glace lorsque soumise aux conditions de chargement typiques d’un impact. Toutefois, la plupart des modèles visant à simuler les impacts de glace se basent sur des rhéologies élasto-viscoplastiques et présentent un domaine de validité restreint. En raison d’un manque de données expérimentales concernant les paramètres contrôlant les mécanismes de fragmentation, ces modèles sous-estiment en particulier l’importance du comportement dynamique de la glace en traction. De plus, ces modèles négligent systématiquement l’effet de la mi-crostructure de la glace. Pourtant, il ressort de l’étude d’autres matériaux fragiles, que les propriétés de fragmentation de ce type de matériau sous chargement de traction dynamique sont fortement dépendantes de la vitesse de déformation et de la microstructure. Dans un grêlon, les porosités sont des candidates sérieuses comme défauts les plus critiques pouvant initier la fragmentation. L’objet de cette étude est donc d’analyser la relation entre la porosité de la glace, les mécanismes d’endommagement et la réponse mécanique macroscopique de la glace en traction dynamique.
Dans ce travail, des essais d’écaillage hautement instrumentés sur des échantillons de glace polycristal-line isotrope, présentant différents taux de porosités, ont été menés à l’aide d’un dispositif expérimental adapté à ce matériau. Les essais d’écaillage ont permis de fournir le premier jeu de données robuste et reproductible pour la résistance en traction dynamique de la glace. À l’opposé de ce qui a pu être observé sous chargement quasi-statique, les résultats montrent une augmentation de la résistance en traction dynamique et de la densité de fissures avec la vitesse de déformation. D’autre part, la porosité diminue la résistance en traction dynamique de la glace. L’influence de la porosité est justifiée en introduisant l’hypothèse que la contrainte critique pour amorcer une fissure sur une porosité est fonction de sa taille. En parallèle de ces travaux expérimentaux, nous proposons l’utilisation du modèle d’endommagement anisotrope Denoual-Forquin-Hild (DFH) pour prédire le comportement dynamique de la glace en traction. La densité de défauts critiques, paramètre d’entrée de ce modèle, est déterminée par deux approches. La première consiste à utiliser, comme dans le modèle de Weibull, une distribution statistique de défauts critiques qui suit une loi puissance de la contrainte appliquée, dont l’exposant (module de Weibull) est fonction de la dispersion sur les contraintes à rupture d’essais de flexion. La seconde est basée sur l’utilisation des distributions réelles de tailles des porosités caractérisées par micro-tomographie aux rayons X. La mécanique linéaire de la rupture est alors utilisée comme critère pour convertir la taille des porosités en contrainte d’activation. Les solutions du modèle avec ces deux approches sont détaillées et comparées aux résultats expérimentaux. Nous observons que l’estimation d’une densité de défauts critiques basée sur la distribution de taille réelle des porosités permet de réaliser des prédictions de résistance et de densité de fissuration sur une plage de vitesses de déformation bien plus large que l’utilisation d’une distribution statistique basée sur le modèle de Weibull. Les essais d’écaillage ont été simulés numériquement avec le modèle DFH. Les résultats de ces simulations numériques sont en très bon accord avec les observations expérimentales, validant ainsi le rôle prépondérant des porosités lors de l’amorçage de la fragmentation dans la glace poreuse. Ces résultats mettent en évidence l’importance de prendre en compte la microstructure (et en particulier la porosité) pour modéliser la résistance en traction dynamique de la glace polycristalline et pour simuler l’impact de grêle sur les structures.
Abstract
Hailstone impacts are a serious threat in the field of aeronautics as they can cause significant damage to a structure. Developing an accurate modelling of the mechanical response of ice when subjected to an impact is required to design robust structures protecting against ice impacts. Nevertheless, most of the constitutive models describing the behavior of ice under impact loadings are based on elasto-viscoplastic approaches with a scope limited to some specific impact conditions. These models usually underestimate the role played by the ice dynamic tensile behavior, while the fragmentation properties of brittle-like materials have been shown to be strongly strain-rate and microstructure dependent. Moreover, the microstructure effect is systematically neglected in these models. Such approximations are mostly due to a lack of knowledge about the parameters controlling the fragmentation mechanisms induced in ice. In a hailstone, pores present in the microstructure are one of the most critical type of defect susceptible to initiate the fragmentation. Thus, this study aims to investigate the link between the ice porosity, the induced damage mechanisms and the ice mechanical response to dynamic tensile loading.
To do so, highly instrumented spalling tests were conducted on isotropic polycrystalline ice samples with different levels of porosity. The spalling tests allowed to provide the first robust and reproducible set of data for the dynamic tensile strength of ice. Tensile strength and crack density are shown to increase with strain-rate, unlike the results observed in the literature for quasi-static loadings. Moreover, the ice tensile strength is found to decrease with increasing the level of porosity. We assumed that the critical stress level required to trigger a crack from a porosity is a function of the porosity size in order to take into account this porosity effect.
In parallel with the experimental tests, the Denoual-Forquin-Hild anisotropic damage model was used to predict the dynamic tensile behavior of ice. The density of critical defects (an input parameter) is determined from two different methods. The first one consists of considering, as in the Weibull model, a statistical distribution of critical defects following a power law of the applied tensile stress, which the exponent (Weibull modulus) depends on the failure stress scattering of bending tests. The second method is based on using micro-computed X-rays analysis to extract the real porosity size distribution of the manufactured ice samples. The theory of the linear elastic fracture mechanics is used as a failure criterion to convert the porosity size into a critical stress of activation. The predictions given by both methods are detailed and compared with the experimental results. We observe that predictions can be made for a much larger strain-rate interval for the ice tensile strength and crack density when the critical defect density is based on the true pore size distribution, rather than on a statistical distribution provided by the Weibull model. Numerical simulations of spalling tests are also conducted using the Denoual-Forquin-Hild model. The results of the numerical simulations are in excellent agreement with the experimental observations, thus corroborating the main effect of the pore populations on the fragmentation initiation in porous ice. These results highlight the need to consider both the ice microstructure (and especially the porosity) and its dynamic tensile behavior as essential factors to model the behavior of hailstones and properly predict their damage effect on structures upon impact.
Table des matières
Introduction 1
1 État de l’art 3
1.1 Aperçu des propriétés du matériau glace . . . 4
1.1.1 Structure cristallographique et propriétés élastiques de la glace monocristalline et polycristalline . . . 4
1.1.2 Réponse mécanique de la glace polycristalline sous chargement quasi-statique . . . 6
1.2 Analyse des propriétés d’un grêlon et de sa réponse sous impact. . . 10
1.2.1 Croissance et propriétés microstructurales d’un grêlon . . . 10
1.2.2 Impacts de grêlons : évaluation des risques . . . 11
1.2.3 Processus de déformation et de rupture au cours d’un impact . . . 12
1.3 Paramètres contrôlant la réponse mécanique des matériaux fragiles sous sollicitations dy-namiques . . . 14
1.3.1 Comportement dynamique en traction . . . 14
1.3.2 Comportement dynamique en compression. . . 16
1.4 Comportement dynamique de la glace : expériences et modélisation . . . 18
1.4.1 Essais de caractérisation . . . 18
1.4.2 Essais d’impact de glace : Expériences et modélisation numérique. . . 21
1.5 Conclusion et présentation de l’approche adoptée dans la thèse . . . 27
1.5.1 Validité des modèles d’impact de glace . . . 27
1.5.2 Méthodologie mise en oeuvre dans la thèse . . . 27
2 Croissance et caractérisation de glace isotrope poreuse 29 2.1 Méthodes de croissance . . . 30
2.1.1 Principe général des méthodes existantes . . . 30
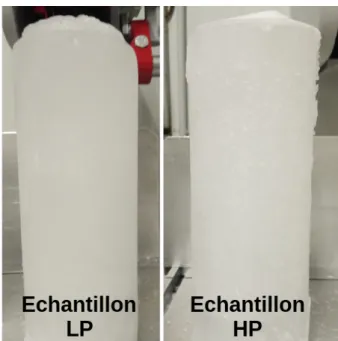
2.1.2 Contrôle de la porosité des échantillons . . . 31
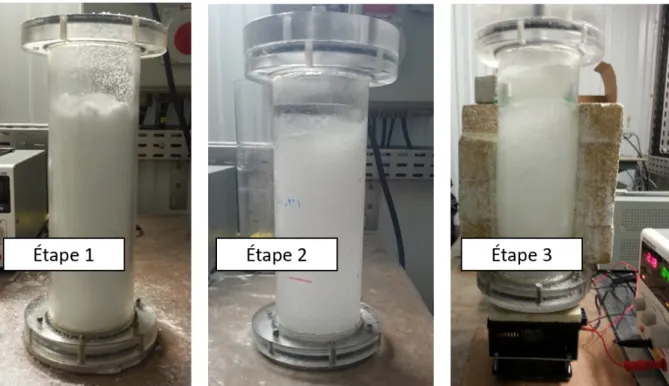
2.1.3 Protocole de croissance à l’IGE . . . 31
2.2 Caractérisation 2D de la microstructure . . . 33
2.2.1 Outil d’analyse : l’analyseur automatique de texture . . . 33
2.2.2 Taille et orientation des grains . . . 34
2.3 Caractérisation 3D de la microstructure . . . 36
2.3.1 Études existantes sur le névé et la glace polycrystalline . . . 36
2.3.2 Principe de la µCT. . . 36
2.3.3 Protocole des analyses µCT au TomoCold (CNRM-CEN) . . . 37
2.3.4 Traitements des images . . . 38
2.3.5 Outils de caractérisation des pores . . . 41
2.3.6 Résultats des analyses par µCT. . . 43
Conclusion du chapitre. . . 47
3 Réponse mécanique de la glace polycristalline soumise à un chargement de traction dynamique par essais d’écaillage 49 Partie I : A study of the mechanical response of polycrystalline ice subjected to dynamic tension loading using the spalling test technique . . . 51
3.1 Introduction. . . 51
3.2 Material and method . . . 52
3.2.1 Specimen preparation . . . 52
3.2.2 Spalling test technique . . . 54
3.3 Test processing . . . 55
3.3.1 Measurement of the tensile strength . . . 55
3.3.2 Measurement of the wave speed in the specimen . . . 56
3.3.3 Bar to specimen transmitted stress ratio . . . 57
3.3.4 Qualitative test checking with an Ultra High Speed camera . . . 57
3.3.5 Determining the applied strain-rate during tensile stage . . . 58
3.4 Results and discussion . . . 59
3.4.1 Validity of the results . . . 59
3.4.2 Tensile strength results . . . 60
3.4.3 Qualitative analysis of the fracture . . . 60
3.5 Conclusions . . . 62
Partie II : Influence of porosity on ice dynamic tensile behavior as assessed by spalling tests . . 63
3.6 Introduction. . . 63
3.7 Materials and methods . . . 65
3.7.1 Sample growth and machining . . . 65
3.7.2 Measurement of the crystallographic orientation with the Automatic Ice Texture Analyser (AITA) . . . 66
3.7.3 Measurement of the 3D pore geometry with micro Computed X-ray Tomography (microCT) . . . 66
3.7.4 The spalling technique . . . 68
3.8 Results. . . 70
3.8.1 2D characterization of the microstructure . . . 70
3.8.2 3D characterization of the microstructure with microCT . . . 71
3.8.3 Tensile strength measurements . . . 72
3.8.4 Fragmentation analysis from UHS camera images . . . 73
3.8.5 Fragmentation analysis from AITA measurements . . . 75
3.8.6 Fragmentation analysis from micro-CT measurements . . . 77
3.9 Discussion . . . 78
3.9.1 strain rate dependency of ice dynamic tensile strength . . . 78
3.9.2 Porosity effects on ice dynamic tensile strength . . . 79
3.10 Conclusion . . . 81
Conclusion du chapitre. . . 82
4 Identification des densités de défauts critiques 83 4.1 Essais de flexion . . . 84
4.1.1 Dimensionnement et usinage des éprouvettes . . . 85
4.1.2 Protocole expérimental . . . 86
4.1.3 Résultats . . . 88
4.1.4 Analyse des résultats. . . 91
4.2 Densité de défauts critiques estimée par le modèle de Weibull . . . 93
4.2.1 Le modèle de Weibull . . . 93
4.2.2 Obtention des paramètres de Weibull : la méthode graphique . . . 94
4.2.3 Les paramètres de Weibull des microstructures LP et HP . . . 95
4.3 Densité de défauts critiques issue des scans de µCT. . . 96
4.3.1 Critère de rupture . . . 96
4.3.2 Calibrage du paramètre de forme Y . . . 97
4.3.4 Détermination d’une loi continue . . . 100
4.4 Domaine de validité du modèle de Weibull . . . 101
4.4.1 Simulation d’essais de traction sur des volumes élémentaires extraits des analyses par µCT. . . 101
4.4.2 Effet de volume sur la contrainte à rupture . . . 103
4.4.3 Problématique pour la modélisation de phénomènes dynamiques . . . 105
Conclusion du chapitre. . . 105
5 Modélisation des processus de fragmentation avec le modèle DFH 107 5.1 Le modèle d’endommagement anisotrope DFH . . . 109
5.1.1 Phénoménologie des processus de fragmentation dans un matériau fragile . . . 109
5.1.2 Solution analytique pour une densité de défauts critiques suivant une distribution de Weibull. . . 111
5.1.3 Solution du modèle DFH pour une densité de défauts critiques issue des mesures par µCT. . . 112
5.1.4 Anisotropie de l’endommagement . . . 113
5.2 Évolution de la contrainte ultime et de la densité de fissures avec la vitesse de chargement 113 5.3 Comparaison avec les résultats expérimentaux. . . 116
5.4 Approche discrète . . . 117
5.4.1 Méthodologie . . . 117
5.4.2 Paramètres de la modélisation discrète . . . 119
5.4.3 Résultats . . . 119
5.4.4 Conclusions de l’approche discrète . . . 122
5.5 Simulations numériques des essais d’écaillage . . . 122
5.5.1 Implémentation du modèle DFH dans Abaqus. . . 122
5.5.2 Paramètres des simulations numériques . . . 123
5.5.3 Détermination de la résistance d’écaillage et de la vitesse de déformation . . . 124
5.5.4 Résultats des essais d’écaillage numériques. . . 124
5.5.5 Discussion sur la validité des simulations numériques . . . 127
Conclusion du chapitre. . . 128
Conclusions et perspectives 130 Conclusions . . . 130
Perspectives . . . 132
Introduction
L’impact de glace atmosphérique, et en particulier la grêle, est une menace sérieuse pour l’industrie de l’aéronautique. Les zones d’un avion exposées aux impacts, telles que le fuselage, les ailes ou encore le nez, peuvent subir des dommages irrémédiables nuisant jusqu’à l’intégrité même de la structure. Le caractère soudain des tempêtes de grêle rendant difficile leur prédiction, il est parfois impossible pour les avions de les anticiper. Le bilan matériel, mais surtout humain dans le cas d’un accident, ne permet pas de négliger ce risque. Afin de dimensionner des structures résistant à des impacts de grêlons sur le long terme, il est nécessaire dans un premier temps de prédire comment l’énergie d’un impact est distribuée entre un grêlon et la structure impactée. Un grêlon est composé de glace et d’air. Ce matériau est très peu résistant par rapport aux matériaux composites ou métalliques dont sont confectionnés les avions. Selon la vitesse d’impact, un grêlon va donc subir une fragmentation intense due à des conditions de chargement et de pression extrêmes. Au cours des premiers instants suivant l’impact, un grêlon est ainsi soumis à un chargement de compression sous confinement aux abords du point d’impact tandis qu’un champs de traction dynamique se développe dans le reste de la structure. La question est alors de savoir, quels sont les paramètres contrôlant les mécanismes d’endommagement dans la glace subissant de telles conditions de chargement ? Et comment la microstructure de la glace est-elle impliquée dans ces mécanismes ? Joue-t-elle un rôle dans les transferts d’énergie qui ont lieu pendant la fragmentation ?
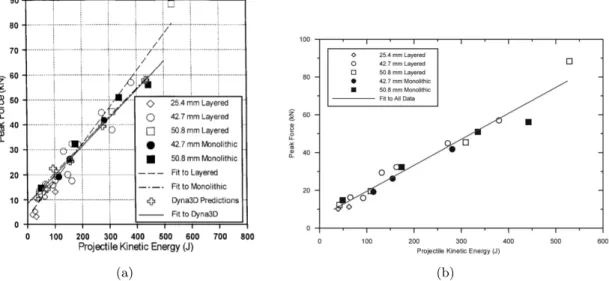
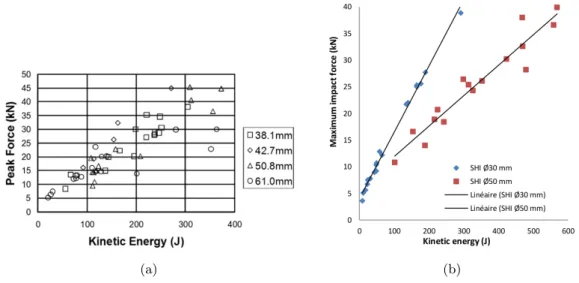
Le comportement mécanique de la glace sous conditions de chargement quasi-statique est maintenant relativement bien connu (Schulson and Duval,2009). Il a été montré en particulier que la microstructure avait une forte influence sur la réponse mécanique de la glace, quelque soit le type de chargement appliqué. Le comportement dynamique de la glace est, en revanche, encore mal compris en raison d’un manque de données expérimentales. La majorité des études existantes se sont focalisées sur la résistance dynamique en compression simple de la glace, par l’intermédiaire d’essais aux barres d’Hopkinson (Jones,1997;Kim and Keune,2007; Shazly et al., 2009). Ces essais ont permis d’identifier une augmentation marquée de la résistance en compression de la glace avec la vitesse de déformation. Toutefois, les résultats souffrent d’une forte dispersion en partie due à des essais mal contraints négligeant les potentiels effets inertiels à l’oeuvre durant ce type d’essai, et également en raison d’échantillons de glace testés non représentatifs de la glace polycristalline. En parallèle, de nombreux essais d’impact de glace sur des cibles rigides ont été menés afin d’étudier les efforts transmis durant un impact (Kim and Kedward,2000;Pereira et al.,2006;
Tippmann et al., 2013;Dousset,2019). Une augmentation de la force maximale d’impact avec l’énergie cinétique du projectile a ainsi été observée, malgré (encore une fois) une dispersion notable des résultats. Dans ces études, le faible intérêt porté aux microstructures des glaces étudiées (dont les processus de fabrication varient fortement d’une étude à l’autre) explique sans doute là aussi la dispersion observée.
Les essais d’impact ont pour objectif essentiel de valider des modèles de comportement d’impacts de glace. Les modèles existants adoptent généralement des approches élasto-plastiques (Kim and Kedward,
2000;Carney et al.,2006;Tippmann et al.,2013) ou élasto-visco-plastiques (Sain and Narasimhan,2011;
Pernas-Sánchez et al.,2012) pour modéliser les impacts de glace. Pourtant, à ces vitesses de chargement, la glace a principalement un comportement fragile. De plus, les nombreux paramètres matériaux utilisés dans les formulations des lois constitutives imposent une calibration manuelle par une étude paramétrique. Cela limite souvent leur application aux études expérimentales spécifiques auxquels ils sont comparés. Parmi les principales hypothèses limitantes, le choix d’une contrainte à rupture en traction constante en fonction de la vitesse de chargement et la non prise en compte des propriétés microstructurales de la glace sont des éléments majeurs. Des travaux portant sur d’autres matériaux fragiles montrent que leur résistance en traction dynamique est fortement sensible à la vitesse de sollicitation et que la microstructure
joue un rôle important sur cette dépendance (Forquin and Hild,2010). Effectivement, les défauts de la microstructure (tels que les porosités) sont responsables de l’amorçage des fissures et contrôlent ainsi les propriétés de fragmentation de ces matériaux fragiles. Nous partons donc de l’hypothèse que la glace, qui présente un comportement fragile lorsque sollicitée à haute vitesse, se caractérise elle aussi par une résistance en traction dépendante de la vitesse de sollicitation, et que les défauts (essentiellement les porosités pour ce qui concerne les grêlons) jouent un rôle sur les mécanismes de fragmentation.
Ces travaux de thèse se proposent d’étudier la validité de ces hypothèses en analysant la relation entre les propriétés microstructurales de la glace polycristalline et sa réponse mécanique macroscopique sous chargement de traction dynamique. La porosité a été choisie comme paramètre d’étude, car, en tant que défaut majeur de la microstructure des grêlons, ce paramètre est soupçonné d’avoir un rôle prépondérant dans les processus de fragmentation. Pour cela, nous tirerons avantage des compétences acquises par l’IGE quant à la production et à la caractérisation de glace polycristalline artificielle afin d’utiliser des microstructures contrôlées. Une description fine en 3D de la porosité pourra également être menée grâce à des analyses par micro-tomographie aux rayons X. La résistance en traction dynamique de la glace sera, elle, étudiée en profitant des moyens expérimentaux développés au laboratoire 3SR, en particulier à travers des essais d’écaillage aux barres d’Hopkinson qui nous permettent d’envisager des vitesses de déformation allant jusqu’à 200 s−1, une première pour la glace. L’originalité de notre approche réside aussi dans l’utilisation du modèle Denoual-Forquin-Hild (dit DFH) (Denoual and Hild,2000;Forquin and Hild,
2010) qui est basé sur une description des micro-mécanismes d’endommagement activés à hautes vitesses de chargement, nous permettant ainsi de prendre en considération le rôle de la microstructure dans la modélisation du comportement en traction dynamique de la glace, ce que ne permettent pas les modèles d’impact de glace actuels. En comparant les prédictions du modèle DFH aux résultats expérimentaux nous aurons ainsi l’opportunité de juger de la pertinence de notre hypothèse portant sur le rôle de la porosité sur la réponse dynamique de la glace.
Nous commencerons dans le chapitre 1 par une revue bibliographique axée sur la thématique des impacts de grêlon. Les connaissances actuelles du comportement dynamique de la glace seront discutées. Les paramètres régissant les processus d’endommagement dans les matériaux fragiles à hautes vitesses de chargement seront également abordés. Dans le chapitre2, nous présenterons les propriétés microstructu-rales des types de glace considérées dans ce travail. Une description détaillée de la porosité par les analyses de micro-tomographie aux rayons X sera aussi fournie. Le chapitre 3 se compose d’un article publié et d’un article soumis traitant des essais d’écaillage réalisés sur les deux types de glace caractérisées dans le chapitre2. Les méthodes d’identification des paramètres d’entrée du modèle DFH seront ensuite décrites dans le chapitre4. Nous en profiterons pour discuter du rôle des porosités dans l’amorçage des fissures dans la glace. Enfin, le chapitre 5 montrera les prédictions du modèle DFH quant au comportement dynamique en traction de la glace. Ce chapitre sera l’occasion de valider la phénoménologie considérée par le modèle sur la glace par l’intermédiaire de simulations numériques des essais d’écaillage.
1
|
État de l’art
Sommaire
1.1 Aperçu des propriétés du matériau glace . . . 4
1.1.1 Structure cristallographique et propriétés élastiques de la glace monocristalline et polycristalline . . . 4
1.1.2 Réponse mécanique de la glace polycristalline sous chargement quasi-statique . 6 1.2 Analyse des propriétés d’un grêlon et de sa réponse sous impact. . . 10
1.2.1 Croissance et propriétés microstructurales d’un grêlon . . . 10
1.2.2 Impacts de grêlons : évaluation des risques . . . 11
1.2.3 Processus de déformation et de rupture au cours d’un impact . . . 12
1.3 Paramètres contrôlant la réponse mécanique des matériaux fragiles sous sollicitations dynamiques . . . 14
1.3.1 Comportement dynamique en traction . . . 14
1.3.2 Comportement dynamique en compression. . . 16
1.4 Comportement dynamique de la glace : expériences et modélisation . . . 18
1.4.1 Essais de caractérisation . . . 18
1.4.2 Essais d’impact de glace : Expériences et modélisation numérique. . . 21
1.5 Conclusion et présentation de l’approche adoptée dans la thèse . . . 27
1.5.1 Validité des modèles d’impact de glace . . . 27
1.1
Aperçu des propriétés du matériau glace
1.1.1
Structure cristallographique et propriétés élastiques de la glace
mono-cristalline et polymono-cristalline
Propriétés cristallographiques
Sous les conditions de pression et de température rencontrées sur Terre, la glace possède une structure cristallographique hexagonale (Pauling, 1935). Ce type de glace est communément appelé glace Ih. Un cristal (ou monocristal) consiste en l’empilement de mailles élémentaires hexagonales délimitées par les atomes d’oxygènes et possédant la même orientation cristallographique. Une maille élémentaire n’a qu’un axe de symmétrie, à savoir l’axe c qui est perpendiculaire au plan basal (Indice de Miller-Bravais (0001). Le plan basal est le plan cristallographique où la densité d’atomes d’oxygène est la plus élevée. Le rapport des modules des axes cristallographiques est c/a = 1.629, soit très proche d’une structure hexagonale compacte.
La glace polycristalline correspond à un agrégat de cristaux (ou grains) ayant des orientations cris-tallographiques, des tailles et des formes différentes. Les joints de grains sont des zones de l’ordre du nanomètre séparant les grains. La majorité des joints de grains sont définis par une différence d’orien-tation supérieure à 5◦. Ces zones jouent un rôle important comme sources ou puits des dislocations (défauts de la structure cristallographique) et sont des foyers préférentiels pour les impuretés ou pour la nucléation de porosités. En effet, la structure cristalline de la glace a tendance à rejeter la plupart des impuretés et défauts volumiques au cours de sa formation. Les défauts d’un polycristal (tels que les porosités, les impuretés ou encore les micro-fissures), sont donc préférentiellement localisés aux joints de grains, sachant que les joints de grains sont eux même des défauts de la structure cristalline. Dans ce manuscrit, nous utiliserons le terme microstructure pour définir la taille et la forme des grains, ainsi que la porosité des glaces polycristallines considérées. Pour décrire l’orientation cristallographique des grains nous emploierons de préférence le terme texture.
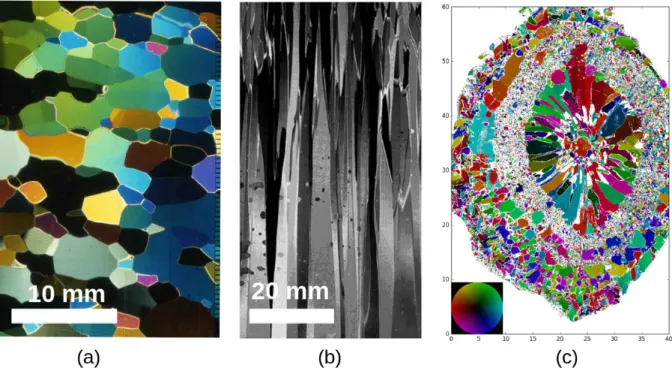
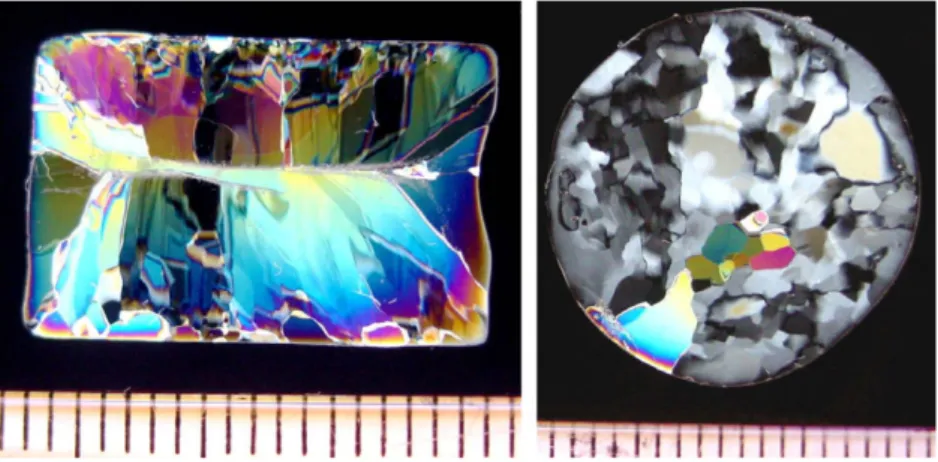
Figure 1.1 – Lames minces de différents types de glace polycristalline vues sous lumière polarisée (a) Forage de Vostok, 3206 m de profondeur (b) Glace de lac (Schulson and Duval, 2009) (c) Grêlon (les dimensions sont renseignées en millimètre sur l’axe des abscisses et des ordonnées) (Montagnat et al.,
2020).
condi-tions thermo-mécaniques rencontrées au cours de sa formation, de nombreuses variantes naturelles de polycristaux ont été reportées. Des exemples régulièrement rencontrés en milieux naturels sont montrés sur la figure 1.1. Les processus de formation sont radicalement différents d’une glace à l’autre, d’où des propriétés microstructurales très variables. Par exemple, la glace de glacier (ou d’iceberg) provient d’une densification du névé alors que la glace de mer (ou de lac) croît à partir de l’eau surfondue sous un gradient de température entre l’eau et l’atmosphère. La glace de glacier possède une microstructure qui peut être relativement équiaxe (forme des grains ne présentant pas d’allongement notable), et dont les orientations cristallographiques vont varier en fonction de l’histoire de déformation. Les cristaux de la glace de mer (ou de glace de lac) présentent une orientation préférentielle marquée ainsi qu’un allonge-ment conséquent des grains. La glace avec une taille de grains uniforme et avec des grains dont la forme est relativement sphérique, est communément appelée glace granulaire (ou équiaxe), elle est considérée comme étant mécaniquement isotrope si elle possède, de plus, une texture isotrope. La glace présentant des grains allongés (en forme de colonnes) est appelée glace colonnaire et présente à l’inverse une forte anisotropie mécanique. Selon l’orientation des axes c avec la direction d’allongement des cristaux, la glace colonnaire est classifiée en trois sous-groupes différents (S1, S2, S3). La glace de grêlon, quant à elle, possède une microstructure et des orientations cristallographiques plus complexes et variables. Elle est au coeur de la problématique étudiée dans cette thèse, et la structure et les propriétés d’un grêlon seront donc abordés en détails dans la section 1.2.1.
Propriétés élastiques
Les propriétés élastiques du monocristal de glace sont maintenant relativement bien connues. Dans le domaine élastique, le tenseur des contraintes σ est relié au tenseur des déformations élastiques εepar la
loi de Hooke :
σ = C εe (1.1)
avec C, le tenseur de raideur du matériau. D’aprèsNye et al.(1985), le tenseur de raideur d’un cristal avec une structure hexagonale peut s’exprimer selon 5 composantes indépendantes. Soit pour la glace Ih :
Cij = C11 C12 C13 0 0 0 C12 C11 C13 0 0 0 C13 C13 C33 0 0 0 0 0 0 C44 0 0 0 0 0 0 C44 0 0 0 0 0 0 1/2(C11− C12) (X1,X2,X3) (1.2)
Les constantes fondamentales sont exprimées selon le système de coordonnées d’une maille, ici l’axe X3est confondu avec l’axe c. L’application d’un chargement statique (mesure d’un déplacement pour une
contrainte donnée) pour déterminer les coefficient d’élasticité du monocristal de glace est peu concluante, car elle induit une sous-estimation de la raideur (Traetteberg et al., 1975). La méthode optimale est finalement l’utilisation d’ondes acoustiques, qui mesurent les coefficients "dynamiques" d’élasticité du monocristal. À ce jour, les meilleurs résultats sont attribués à l’étude deGammon et al.(1983) qui utilise la spectroscopie Brillouin (cf tableau1.1). Il a été remarqué une faible sensibilité des propriétés élastiques du monocristal à la température, soit de l’ordre de 1.4 % pour une différence de 10◦C (sur l’intervalle [0◦C : -50◦C]). La figure 1.2donne le module d’élasticité (ou module d’Young) du monocristal de glace en fonction de la direction de chargement par rapport à l’axe c. Outre une faible élasticité, le monocristal de glace possède une anisotropie élastique de l’ordre de 15 %.
Les propriétés élastiques du polycristal dépendent des distributions de taille, de forme et d’orienta-tion des grains. La porosité et l’endommagement sous forme de micro-fissures ou de déformad’orienta-tion plastique influencent également l’élasticité de la glace polycristalline. Dans le tableau 1.2, sont résumées les
dif-Coefficients élastiques de C (GPa) C11= 13.93
C12= 7.08
C13= 5.77
C33= 15.01
C44= 3.01
Module de compressibilité isostatique (GPa) K = 8.90 Coefficients de Poisson ν12= 0.415
ν13= 0.224
ν14= 0.274
Densité (kg.m−3) 917
Table 1.1 – Propriétés élastiques du monocristal de glace Ih à -16◦C (Gammon et al.,1983).
férentes propriétés élastiques de glace isotrope non endommagée avec une porosité nulle. Il est attendu que la raideur du polycristal diminue avec une augmentation de la porosité et/ou de l’endommagement (Langleben and Pounder,1961;Reyes-Morel and Chen, 1990).
Module d’élasticité (GPa) E = 9.33
Module de compressibilité isostatique (GPa) K = 8.90
Module de cisaillement (GPa) G = 3.52
Coefficient de Poisson 0.325
Table 1.2 – Propriétés élastiques de la glace équiaxe isotrope à -16◦C (Gammon et al., 1983).
Figure 1.2 – Module d’élasticité (en GPa) du monocristal de glace à -16◦C selon l’orientation du char-gement avec l’axe c (Schulson and Duval,2009).
1.1.2
Réponse mécanique de la glace polycristalline sous chargement
quasi-statique
Dans des conditions de température données, selon la vitesse à laquelle elle est sollicitée, la glace pourra exhiber un comportement ductile (déformation plastique, vitesses de déformation faibles) ou pu-rement fragile (déformation élastique jusqu’à rupture, vitesses de déformation élevées). Au vu de notre problématique, les travaux résumés dans cette section se focalisent sur les processus responsables de la réponse fragile de la glace. Comme la majorité des matériaux fragiles, la glace réagit différemment lorsqu’elle est soumise à un chargement de traction ou de compression. La sensibilité du comportement mécanique de la glace aux paramètres externes (vitesse de chargement, température, méthode
expéri-mentale) et aux propriétés microstructurales (taille et orientation des grains, porosité, composition, etc.) est donc analysée selon l’état du chargement appliqué. Une brève introduction concernant la réponse de la glace sous confinement est également présentée.
Rupture fragile de la glace sous chargement de traction
Le comportement en traction de la glace est régulièrement étudié par l’intermédiaire d’essais de flexion, d’essais brésiliens ou encore par la méthode du ring test. Lorsque l’on cherche à mesurer la résistance en traction de la glace, la meilleure méthode reste l’essai de traction simple, bien que ce type d’essai ne soit pas anodin sur de la glace. La transition ductile/fragile (apparition des premiers phénomènes de fissuration) en traction de la glace équiaxe isotrope se produit aux alentours de 10−7 s−1. À mêmes conditions expérimentales et mêmes propriétés microstructurales, la résistance en traction de la glace est essentiellement indépendante de la vitesse de déformation sur l’intervalle [10−7 s−1 :10−1 s−1] (Hawkes and Mellor, 1972; Schulson et al., 1984; Druez et al., 1987; Schulson, 2001). À ces vitesses, un plan de rupture unique et perpendiculaire au chargement est identifié, résultant de la propagation d’une seule fissure. La résistance à rupture de glace équiaxe isotrope, avec une taille de grains d’approximativement 2 mm, se situe aux environs de 1 MPa (à -10◦C). Cette faible sensibilité à la vitesse de chargement dans le domaine quasi-statique est caractéristique des matériaux fragiles (Forquin and Hild,2010).
De même, la résistance en traction de la glace pure n’est que peu sensible à la température.Carter
(1971) a observé une variation d’environ 10% lorsque la température décroissait de 0◦C à -30◦C. Au contraire, la résistance en traction de la glace de mer est fortement dépendante de la température. Cela est dû à la présence de poches de saumure aux joints de grains dont la taille fluctue avec la température. La glace de mer offre une réponse mécanique pouvant largement différer de celle de la glace pure de par l’effet de ces poches de saumure. Il est ainsi difficile de comparer les propriétés mécaniques de ces deux types de glace, qui peuvent finalement être considérées comme deux matériaux différents.
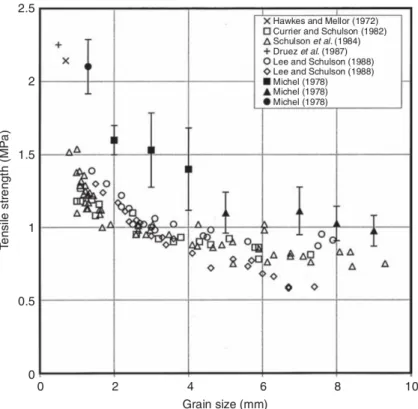
D’un point de vue de la microstructure, le paramètre à avoir été le plus étudié est probablement la taille de grains (cf figure1.3). En effet, il a été remarqué une assez grande sensibilité à ce paramètre de la résistance en traction de la glace (Hawkes and Mellor,1972;Schulson et al.,1984). D’aprèsSchulson and Duval(2009), cette dépendance prend une forme de type Hall-Petch pour des vitesses de déformation de l’ordre de 10−3 s−1, soit :
σT = σ0+ ktd−0.5 (1.3)
avec σ0et ktdes paramètres matériaux, et d la taille des grains. Les joints de grains sont des défauts
du réseau cristallin et sont donc propices à une accumulation de contraintes (stockage d’énergie élastique, glissement intergranulaire, etc.). La taille des micro-fissures générées aux joints de grains est donc souvent reliée à la taille des grains.Carter(1971) a également étudié la rupture de monocristaux sous chargement de traction. Les résultats montrent que la résistance en traction varie fortement selon l’orientation de l’axe c, les valeurs évoluant de 2 MPa à 6 MPa pour respectivement un chargement orienté à 45◦ et à
90◦ de l’axe c. Dans cette même étude, il a également été montré que la résistance en traction de la glace polycristalline à microstructure colonnaire était significativement plus élevée (d’environ 25%) lorsque l’axe de chargement était confondu avec la direction d’allongement des grains que pour un chargement perpendiculaire à cette direction.
L’effet de la porosité sur la résistance en traction de la glace pure demeure une thématique à explorer. En effet, à notre connaissance, aucune étude n’a porté sur une analyse quantitative de l’influence de la porosité pour des essais de traction uniaxiale. Sur ce point, le rôle de la porosité sur la résistance en flexion est plus documenté et sera abordé dans le chapitre4. Pourtant, les pores peuvent être classifiés comme étant des défauts majeurs de la microstructure pouvant initier une rupture fragile sous chargement de traction, ce qui est par ailleurs observé sur d’autres matériaux fragiles (Haynes,1971).
Figure 1.3 – Résistance en traction de la glace polycristalline pure à -10◦C en fonction de la taille de grains considérée (Schulson and Duval,2009).
Rupture fragile de la glace sous chargement de compression
La transition ductile/fragile survient à plus hautes vitesses de déformations en compression qu’en traction, soit aux environs de 10−4 s−1− 10−3 s−1 pour la compression. La rupture fragile de la glace
en compression est un processus moins rapide que la rupture en traction. En effet, les premiers phéno-mènes de fissuration apparaissent pour un chargement d’environ 30% de la contrainte finale à rupture (Cannon et al.,1990;Schulson et al.,1991). Les plans de ruptures sont relativement parallèles à l’axe de chargement. Pour la glace colonnaire, les plans de rupture semblent provenir de l’initiation, la croissance et la coalescence de "wing-cracks" (cf figure1.4) (Schulson,2001). Le même processus est probablement à l’oeuvre dans la glace équiaxe, bien que plus difficile à observer étant donné que le développement des "wing-cracks" est contraint par la microstructure (Schulson,1990).
Figure 1.4 – Schéma représentant l’initiation d’une "wing-crack" dans la glace sous chargement de compression simple (Schulson and Duval,2009).
La résistance en compression de la glace est largement supérieure à sa résistance en traction. Pour une microstructure identique, le ratio est σC/σT ≈ 8 à -10◦C et σC/σT ≈ 20 à -50◦C (Schulson and Duval, 2009). La résistance en compression diminue légèrement lorsque la vitesse de déformation augmente, passant par exemple de 15 MPa à 10 MPa pour de la glace équiaxe isotrope (taille de grains ≈ 1 mm) sur l’intervalle [10−3 s−1 : 10−1 s−1] (Carter, 1971). La température joue par contre un rôle beaucoup plus important. Schulson(1990) ou encoreArakawa and Maeno (1997) ont montré que la résistance en compression augmentait avec des températures décroissantes selon 0.3 MPa.◦C−1.
Tout comme pour la résistance en traction, la résistance en compression montre une certaine sensibilité à la taille de grains, bien que moins prononcée (Cole,1987). L’orientation cristallographique est également impliquée dans la réponse mécanique de la glace sous chargement de compression. Suivant le même comportement qu’en traction, la résistance en compression d’un monocristal atteint un minimum (12 MPa) pour une orientation de l’axe c à 45◦ de l’axe du chargement. Le maximum (32 MPa) est atteint lorsque l’axe c est parallèle au chargement (Carter,1971).
Exception faite des études portées sur la glace de mer, peu d’informations transparaissent sur l’effet de la porosité sur le comportement en compression de la glace. Kermani et al. (2007) ont rapidement abordé cette thématique sur du givre crût en soufflerie. Ils ont pu mettre en évidence le rôle de cavités, de larges porosités et de micro-fissures dans l’affaiblissement de la résistance en compression de leurs éprouvettes de givre.
Comportement mécanique de la glace sous confinement
En milieux extérieurs, la glace est régulièrement soumise à un état de contrainte multiaxiale. La caractérisation de la réponse mécanique de la glace est alors étudiée par l’intermédiaire d’essais biaxiaux ou triaxiaux. La configuration expérimentale souvent adoptée consiste à soumettre l’échantillon à une pression de confinement hydrostatique p (p = −σ1 = −σ2 = −σ3, avec σ1, σ2 et σ3 respectivement les
première, seconde et troisième contraintes principales) via un fluide, puis d’appliquer un chargement axial additionel σa. La première contrainte principale est alors σ1= σa− p. La résistance en compression de la
glace confinée est bien plus élevée que sa résistance en compression uniaxiale (cette différence fluctue avec la pression de confinement), et est en majeure partie contrôlée par la contrainte déviatorique (égale à la différence maximale de contrainte σq = σ1− σ3 = σa). D’après Jones(1982), la résistance déviatorique
de la glace équiaxe isotrope augmente fortement avec la pression de confinement p, jusqu’à atteindre un plateau au delà d’une pression de 10-15 MPa (pour σq ≈ 60 MPa) (cf figure1.5). La glace soumise à un
chargement de compression confinée rompt via le développement de plans de rupture orientés entre 30◦et 45◦ (selon la pression de confinement) de l’axe de la contrainte principale σ1. Plus la pression appliquée
est élevée, plus les phénomènes de plasticité sont importants. La sensibilité de la réponse déviatorique de la glace pure à la vitesse de chargement n’a pas été analysée jusqu’à présent. À noter par contre, la forte influence de la forme des grains et de l’orientation cristallographique, la glace colonnaire ayant une enveloppe de rupture significativement différente de la glace équiaxe isotrope (Schulson and Duval,2009). La réponse hydrostatique (déformation volumique en fonction de la pression hydrostatique) de la glace est également une zone d’ombre dans la littérature et aucune loi de compaction n’a été établie à notre connaissance.
Figure 1.5 – Résistance déviatorique de la glace équiaxe isotrope (taille de grains ∼ 1 mm) en fonction de la pression de confinement p, d’après les résultats deJones(1982) etRist and Murrell(1994) compilés parSchulson and Duval(2009).
1.2
Analyse des propriétés d’un grêlon et de sa réponse sous
im-pact
1.2.1
Croissance et propriétés microstructurales d’un grêlon
Les grêlons se forment généralement dans les cumulonimbus, c’est à dire des nuages à forte extension verticale générés par une instabilité de l’air dans la couche limite de l’atmosphère. Il est maintenant admis que le système prédominant de croissance des grêlons est l’accrétion et la solidification de gouttelettes d’eau surfondues à partir d’un embryon (noyau de congélation) (Macklin, 1977). Au cours de sa crois-sance, le grêlon va être soumis à de forts courant ascendants et descendants (très actifs dans la cellule orageuse) entraînant donc une variation des conditions atmosphériques au cours du temps. Les modes de croissance d’un grêlon sont extrêmement dépendantes de ces conditions atmosphériques et peuvent être vues comme un équilibre entre la vitesse d’accrétion et les transferts de chaleur. Cet équilibre est fonction de la vitesse de chute, de la température extérieure et de l’humidité relative du nuage (Knight and Knight,2005). Selon la température du nuage, seule une certaine fraction des gouttelettes heurtant le grêlon va geler immédiatement, tandis que le reste solidifie lentement. Un grêlon croît jusqu’à ce que les forces générées par les courants de convection ne contrebalancent plus la force de gravité.
Dans son état final, le grêlon présente une forme plus ou moins sphérique avec une alternance de couches concentriques claires et opaques de glace (cf figure 1.6). Des grêlons présentant des formes co-niques ou irrégulières existent mais sont moins fréquents (Weickmann,1953;List,1959). Certains grêlons peuvent atteindre des tailles allant jusqu’à 15 cm de diamètre. Les couches opaques sont souvent compo-sées de petits grains et incluent une importante densité de porosités. Ces couches sont suppocompo-sées croître dans des conditions "sèches" (solidification rapide des gouttelettes). Les couches claires (ou transparentes) se forment par croissance "humide" (wet growth), c’est à dire à une vitesse de solidification lente par rapport aux transferts de chaleur. Dans ces couches, de gros grains ainsi qu’une faible porosité (l’air dissoute dans l’eau est expulsée par diffusion au cours de la croissance) sont généralement observés.
di-(a) (b)
Figure 1.6 – (a) Lame mince de grêlon récupéré après un orage dans le Nebraska (Knight and Knight,
2005). (b) Microstructure d’un grêlon, d’après une analyse de lame mince avec un analyseur automatique de texture (Montagnat et al.,2020). L’échelle de couleur est associée à l’orientation de l’axe c des grains et les dimensions sont renseignées en millimètre sur l’axe des abscisses et des ordonnées.
zaines de µm à presque 1 cm (Pflaum,1984). Les plus gros cristaux sont allongés selon la direction radiale (direction de croissance). Montagnat et al. (2020) ont récemment analysé la texture cristallographique de gros grêlons via un analyseur automatique de texture (un exemple est donné sur la figure 1.6b). Ils ont observé que certaines couches possédaient des grains relativement équiaxes avec une orientation cris-tallographique aléatoire, tandis que d’autres couches présentaient des grains avec une forte orientation préférentielle. Selon les grêlons étudiés, il s’est avéré que les axes c pouvaient soit être orientés parallèle-ment à la direction de croissance, soit être orientés perpendiculaireparallèle-ment à cette direction (équivalent aux glaces de type S1 et S2).
La densité des grêlons est en moyenne supérieure à 870 kg.m−3, bien que des mesures à 800 kg.m−3ne soient pas rares (Macklin et al.,1960;Mossop and Kidder,1961).List et al.(1970) ou encoreProdi(1970) ont mesuré la densité des couches composant un grêlon. La densité de ces couches varie globalement de 820 kg.m−3pour les couches opaques à 917 kg.m−3pour les couches transparentes. L’importante porosité des couches opaques est due à une grande densité (de 106à 108par cm3, selonMacklin et al.(1976) après l’étude de 6 grêlons) de petits pores de quelques dizaines de µm de rayon. De plus grands pores avec une densité plus faible et présentant une forme allongée selon la direction de croissance sont observés dans les couches transparentes. Le rayon équivalent de ces pores dépasse fréquemment la centaine de micromètres. De nombreuses études ont également reporté la présence de cavités ou d’inclusions de l’ordre de plusieurs millimètres (Pflaum,1984).
1.2.2
Impacts de grêlons : évaluation des risques
Les modèles et mesures météorologiques actuels permettent de suivre avec précision et en temps réel les trajets d’averses de grêles. Cependant, l’augmentation continue de la densité du trafic aérien ces dernières décennies, fait qu’il est parfois difficile de dévier un avion de sa route aérienne. Sans compter que la formation de cellules orageuses est un phénomène rapide. Souter and Emerson(1952) ont recensé les dommages dus à des impacts de grêlons sur 131 avions au cours de la période (1938-1952). Ils ont
observé que les sections frontales des ailes et l’empennage étaient les zones les plus susceptibles d’être endommagées. Les dommages sur le fuselage étaient surtout concentrés à l’avant de l’avion (au niveau du cockpit et du nez) où la verrière était occasionnellement fracturée. Les impacts de grêlons peuvent également générer de l’endommagement difficile à repérer en surface (pas de déformation ou de fracture visible), notamment sur les matériaux composites à présent activement utilisés dans l’aéronautique.
Figure 1.7 – Exemples d’avions endommagés suite à une tempête de grêle (Field et al., 2008). L’énergie cinétique associée à un grêlon durant un impact est reliée à deux paramètres : la vitesse de l’impact et la masse du grêlon. La vitesse d’impact dépend de la situation étudiée. Pour des avions stationnés au sol ou d’autres structures terrestres, la vitesse d’impact sera égale à la vitesse terminale de chute d’un grêlon. Cette dernière dépend surtout de sa trainée qui est fonction de la taille et de la forme géométrique du grêlon. Elle fluctue généralement autour de 30 à 50 m.s−1. Pour des avions en vol, la vitesse d’impact dépendra directement de la vitesse de l’avion, soit entre 100 m.s−1et 150 m.s−1pour des vols commerciaux. Les impacts de "petits" grêlons (inférieurs au centimètre) sont les plus fréquents. Par exemple, Gringorten(1971) estime à P = 0.07 la probabilité de formation d’un grêlon dont le diamètre est supérieur à 2.5 cm. L’évènement de grêle survenu en 1995 aux environs de Dallas, où des grêlons de l’ordre de la dizaine de centimètres ont endommagé 100 avions stationnant au sol (Saul and Lunford,
1995), nous rappelle toutefois que cette probabilité n’est pas à négliger.
L’objectif étant de concevoir des structures aéronautiques résistant à ces impacts, il est nécessaire d’être capable de prédire la force générée par un impact. Cette force est en grande partie conditionnée par le ratio de l’énergie cinétique dissipé par les phénomènes de rupture se développant dans un grêlon durant les premiers instants suivant un impact. Le tout étant de comprendre comment les propriétés mécaniques et microstructurales de la glace sont impliquées dans ce processus.
1.2.3
Processus de déformation et de rupture au cours d’un impact
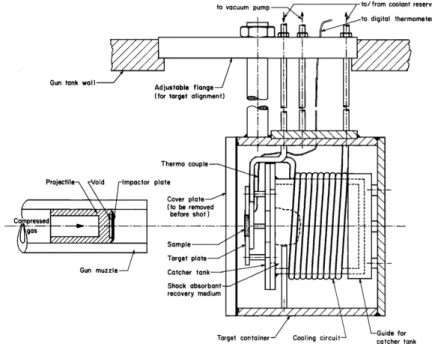
À notre connaissance, il n’existe pas d’étude publiée montrant des essais d’impact avec des grêlons "naturels", et aucun impact contre une structure aéronautique dans des conditions réelles n’a été filmé. La figure1.8montre ce qui est probablement la meilleure série d’images à disposition dans la littérature pour des essais d’impacts de glace (images provenant de (Tippmann et al., 2013)). Bien que le matériau utilisé soit une sphère de glace formée en laboratoire (avec une microstructure très éloignée de celle du grêlon), ces images permettent tout de même d’apprécier les différents modes de rupture de la glace pendant un impact. Ces données nous donnent également l’occasion de discuter de l’état des contraintes internes développées dans le projectile.
Les images de la figure1.8se limitent aux premiers moments de l’impact, c’est à dire durant l’intervalle où se développe le maximum de la force d’impact (cf figure1.9), ce qui correspond aux instants au cours desquels la structure impactée est endommagée. Sur les premières microsecondes faisant suite à l’impact, une zone restreinte aux environs du point d’impact subit un écrasement important résultant en une
Figure 1.8 – Images d’un impact de sphère de glace ( = 61 mm) sur une cible rigide (barre d’Hopkinson) pour une vitesse d’impact de 61.8 m.s−1 (Tippmann et al.,2013).
extrême fissuration de la glace. Au voisinage du point d’impact, l’échantillon est soumis à un état de compression local. La matière adjacente au point d’impact induit également un confinement latéral sur cette zone du projectile. Dans de telles conditions de chargement, on peut s’attendre à des phénomènes de micro-fissuration (ouverture des fissures en mode II) et possiblement de plasticité comme observé sur d’autres matériaux fragiles (Forquin,2017).
Figure 1.9 – Courbe d’effort générée par l’impact présenté sur la figure 1.8(Tippmann et al.,2013) Puis, très rapidement (i.e. 40 µs après contact), le reste du projectile se fragmente sous la forme de fissures longitudinales orientées parallèlement à la direction de l’impact. Les premiers phénomènes de fragmentation sont initiés à l’avant de la structure avant de se développer progressivement vers l’arrière du projectile. Ces fissures sont caractéristiques du développement de contraintes orthoradiales de traction dans l’échantillon. En effet, de par la compression diamétrale, la majorité du volume de la sphère de glace est soumis un champs de traction dynamique. Le maximum de la force d’impact est atteint au cours du développement des fissures longitudinales. Après fragmentation, la force de contact transmise à la cible décroît lentement et caractérise la force résiduelle du projectile. Tippmann et al. (2013) comparent le comportement du projectile entièrement fragmenté à celui d’un fluide, vu qu’il n’existe plus aucune force de cohésion entre les fragments de glace.
Les modes de rupture observés dans cet exemple sont typiques du comportement des matériaux fragiles. Les figures 1.10a et 1.10b montrent l’état final d’éprouvettes, respectivement de béton et de céramique de carbide de silicium (céramique SiC,) ayant subies un impact sur tranche en configuration sarcophage (Forquin and Erzar, 2010; Forquin et al., 2018). Bien que dans ces deux exemples les rôles
(a) (b)
Figure 1.10 – Éprouvettes fragmentées de (a) béton et de (b) céramique SiC après un essai d’impact sur tranche en configuration sarcophage (Forquin and Erzar,2010;Forquin et al.,2018).
soient inversés (les matériaux étudiés sont cette fois-ci impactés par un projectile), les même processus d’endommagement sont à l’oeuvre (en faisant abstraction des effets de géométrie). Ainsi, la zone proche du point d’impact est très endommagée, et de nombreuses fissures orthoradiales ont été initiées par la propagation des ondes incidentes générant un déplacement radial de la matière. Des plans d’écaillage perpendiculaires à la direction de l’impact sont également visibles, ils sont dus à l’interaction des ondes de détentes avec le bord libre de l’éprouvette.
1.3
Paramètres contrôlant la réponse mécanique des matériaux
fragiles sous sollicitations dynamiques
1.3.1
Comportement dynamique en traction
L’essai d’écaillage est une configuration largement employée pour caractériser la résistance en traction dynamique à rupture d’un matériau fragile (Forquin,2017). Il consiste en la génération d’un champs de traction dynamique via l’interaction d’ondes incidentes de compression avec des ondes de détentes (ondes réfléchies transportant l’information d’un bord libre). Cette méthode est rendue possible par le fait que la résistance en traction des matériaux fragiles est faible devant leur résistance en compression, ce qui évite un endommagement précoce lors du passage du pulse de compression.
Lorsque des vitesses de déformation modérées sont souhaitées ( ˙ε < 200 s−1), l’essai d’écaillage aux barres d’Hopkinson est parfaitement adapté (Erzar and Forquin, 2010). Aux barres d’Hopkinson, il est également possible de réaliser des essais de traction directe (Zielinski,1982) ou encore de type brésilien (Saksala et al., 2013). Les géomatériaux, tels que les bétons et les roches, on été activement étudiés avec ces configurations expérimentales (Schuler et al., 2006; Erzar and Forquin, 2011; Saadati et al.,
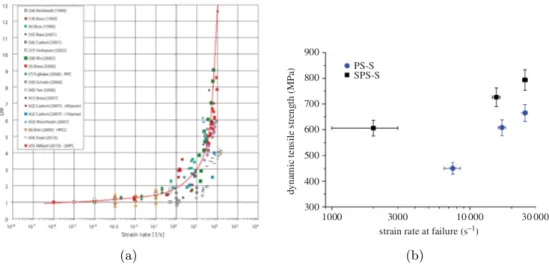
2016). Pająk(2011) a recensé les résultats de 18 études différentes portant sur la résistance en traction dynamique du béton (cf figure1.11a). Les auteurs en ont conclus à une forte croissance du DIF (Dynamic Increase Factor en anglais, soit le rapport de la résistance du matériau en dynamique à sa résistance dans des conditions de chargement quasi-statique) avec la vitesse de déformation. Cette sensibilité à la vitesse de déformation semble apparaître aux environs de 100− 101s−1. De même pour les roches, et notamment
le granit, une dépendance similaire à la vitesse de chargement a été mis en évidence (Cho et al., 2003;
(a) (b)
Figure 1.11 – Dépendance à la vitesse de déchargement de la résistance en traction (a) du béton (Pająk,
2011) et (b) de deux nuances de SiC (Zinszner et al., 2017)
Lorsque des matériaux très résistants sont considérés (typiquement, les céramiques utilisées pour les blindages) ou que de très grandes vitesses de déformation sont visées, la résistance d’écaillage des maté-riaux fragiles est étudiée par l’intermédiaire d’impact de plaques. Pendant longtemps, seuls des impact de plaques avec choc ont été réalisés (Bless et al., 1986; Cagnoux and Longy, 1988). L’inconvénient de cette technique est qu’elle ne permet pas de remonter à la vitesse de déformation appliquée au moment de la rupture. Les contraintes d’écaillage sont alors données en fonction du niveau de choc. Ce n’est que récemment, avec le développement de nouvelles méthodes, que la sensibilité de la résistance d’écaillage des céramiques à la vitesse de déformation a pu être analysée. C’est par exemple le cas deZinszner et al.
(2017), qui ont pu utiliser le dispositif GEPI (Générateur Électrique de Pression Interne) pour caractéri-ser la résistance d’écaillage de différentes nuances de céramiques SiC sur l’intervalle [2000 s−1-25000 s−1]. Ils ont ainsi pu noter une forte augmentation des contraintes à rupture avec la vitesse de chargement par rapport à la résistance quasi-statique de ces céramiques (cf figure1.11b).
Pour l’ensemble de ces matériaux, la résistance en traction montre un caractère probabiliste (forte dispersion des contraintes à rupture) et une faible sensibilité à la vitesse de déformation sous des condi-tions de chargement quasi-statique, alors qu’à l’inverse, la résistance en traction augmente fortement à hautes vitesses de chargement et tend vers un comportement déterministe (Forquin and Hild,2010). Ce phénomène est due au fait que la vitesse de propagation d’une fissure (et donc de l’endommagement) est limitée. Une transition dans les processus d’endommagement est alors observée. À faibles vitesses de chargement, la rupture en traction d’un matériau fragile provient de l’initiation et la propagation d’une ou quelques fissures, soit le cas d’une fragmentation simple. Au-delà d’une vitesse de transition, l’inten-sité de la fragmentation augmente avec la vitesse de déformation et le comportement du matériau passe d’un régime probabiliste à un régime déterministe. Les essais d’impact sur tranches (cf figures 1.10aet
1.10bde la section1.2.3) permettent d’analyser cette dépendance de la densité de fissures à la vitesse de déformation.Forquin and Ando(2017) ont ainsi pu montrer, par des mesures de micro-tomographie aux rayons X sur des céramiques fragmentées, que plus on s’éloigne du point d’impact (autrement dit, plus la vitesse de chargement est faible), plus la taille de fragment augmente (cf figure 1.12a).
Il est généralement acquis pour les matériaux fragiles que, sous sollicitations dynamiques, les fissures s’amorcent sur des défauts de la microstructure (micro-fissures, inclusions, porosités, défauts de frittages, impuretés, etc.). Ainsi, des matériaux avec différentes populations de défauts montrent différentes pro-priétés de fragmentation. Par exemple, Forquin et al. (2018) ont analysé les distributions de taille de fragments sur quatre nuances de céramiques SiC ayant été impactées à la même vitesse (cf figure1.12b). Pour chaque céramique SiC, différents processus de frittage ont été utilisés ce qui a une importante répercussion sur leurs propriétés microstructurales. Les résultats expérimentaux montrent ainsi que les
(a) (b)
Figure 1.12 – (a) Visualisation 3D de la taille des fragments d’une céramique SiC (nuance SPS-S) après un essai d’impact sur tranche en configuration sarcophage (Forquin and Ando,2017). (b) Distribution de taille des fragments de quatre nuances de carbides de silicium après des essais d’impact sur tranche en configuration sarcophage (Forquin et al.,2018)
quatre céramiques exhibent des densités de fissures et des distributions de taille de fragment très diffé-rentes. Dargaud and Forquin (2020) étudient par ailleurs l’influence de la porosité sur les processus de fragmentation pour améliorer les performance de céramiques sous impacts multiples. L’inclusion de larges porosités dans le matériau permet en effet de limiter la taille de fragments après un premier impact, la céramique endommagée conservant alors une résistance résiduelle importante. La porosité a également un rôle important sur la résistance en traction dynamique des bétons. Tant de façon directe (amorçage des fissures) pour les bétons secs qu’indirecte pour les bétons humides, la teneur en eau étant reliée à la porosité du béton (Erzar and Forquin,2011).
1.3.2
Comportement dynamique en compression
Essais de compression simple aux barres d’Hopkinson
Sur les géomatériaux, les essais de compression uniaxiale à hautes vitesses de chargement ont un inté-rêt limité pour l’identification de paramètres matériaux. En effet, la résistance en traction des matériaux fragiles étant très faible devant la résistance en compression, les essais peuvent être difficiles à interpréter à cause de la possible influence d’effets de confinement par friction ou par effets inertiels conduisant à une élévation apparente de la résistance. Les études existantes de compression simple ont majoritairement été réalisées aux barres d’Hopkinson. La méthode consiste à placer l’échantillon entre une barre incidente et une barre sortante. Une onde incidente de compression générée par l’impact d’un projectile sur la barre incidente se propage le long de celle-ci. Une part de l’énergie est transmise à l’échantillon et le reste est réfléchi à l’interface entre la barre incidente et l’échantillon. Le même phénomène se répète à l’interface échantillon/barre sortante. Le problème de cette méthode est que, pour appliquer la procédure de traite-ment proposée parKolsky(1949), l’échantillon est considéré comme étant soumis à un état de contrainte uniaxial uniforme. Cette hypothèse ne se vérifie qu’après plusieurs aller-retours d’ondes dans l’échantillon (π aller-retours selonDavies and Hunter(1963)). La solution adoptée par de nombreuses études a été de considérer des échantillons avec un ratio épaisseur/diamètre très faible. Or, étant donné l’hétérogénéité des géomatériaux, les volumes testés sont alors souvent loin du Volume Élémentaire Représentatif (VER). Un autre défaut de cette méthode (bien plus problématique), est que la réduction en épaisseur (sans ré-duction de diamètre) de l’échantillon entraîne possiblement un état de contrainte tri-axial dû à l’inertie radiale de la matière et à des effets de frottement (au niveau des surfaces de contact avec les barres) lors de l’expansion de l’échantillon. Or, comme nous allons le voir par la suite, les matériaux fragiles sont très sensibles à la pression de confinement. Zhang et al.(2009) décrivent par ailleurs la sensibilité de la
résistance en compression dynamique uniaxial des bétons à la vitesse de déformation comme étant un artefact de mesure.
Comportement déviatorique et sphérique à hautes vitesses de déformation
Les matériaux fragiles présentent une forte dépendance à la pression de confinement, avec à la clef l’existence de phénomènes de plasticité et des ouvertures de fissures en mode II. Sous fort confinement, les matériaux fragiles peuvent significativement changer de comportement et exhiber une importante ductilité. Le comportement déviatorique (évolution de la contrainte déviatorique avec la pression hydro-statique) et sphérique (compaction de la matière) peut être étudié à travers des essais de compression triaxiale ou encore des essais de compression quasi-oedométrique (Forquin et al.,2007). Durant un essai quasi-oedométrique, le gonflement d’une éprouvette cylindrique chargée uniaxialement est empêché par une cellule très rigide. Cette méthode permet de remonter à la contrainte déviatorique, à la pression hydrostatique et à la déformation volumique au cours du temps. L’avantage de cette technique expé-rimentale, est qu’elle est adaptable à des conditions de chargement dynamique pour les géomatériaux (Forquin et al.,2008).Piotrowska et al.(2016) ont ainsi pu montrer que la raideur volumique et la résis-tance déviatorique initiale étaient plus élevées dans des conditions dynamiques pour deux types de bétons composés soit d’agrégats de silice soit d’agrégats de calcaire (cf figure1.13). La sensibilité à la vitesse de chargement du comportement mécanique du béton sous confinement semble toutefois être fonction de la microstructure étudiée (Forquin et al.,2008;Piotrowska et al.,2016).
Figure 1.13 – Comparaison du comportement sphérique (à gauche) et déviatorique (à droite) statique et dynamique d’un béton composé d’agrégats de silice sous chargement de compression quasi-oedométrique (Piotrowska et al.,2016).
Bien que performant pour les bétons ou les roches, les essais triaxiaux ou quasi-oedométriques sont difficilement applicables sur les céramiques hautes performances étant donné les niveaux de contrainte à atteindre. Le comportement inélastique est alors étudié par impact de plaques, où un état de contrainte triaxial en compression, caractérisé par un état de déformation uniaxiale, est généré par l’impact d’une plaque impactrice. Le principe est le même que pour l’écaillage par impact de plaque, sauf que cette fois-ci la face arrière n’est pas laissée libre de contrainte. Ce type d’essai permet d’avoir accès à la Limite Élastique d’Hugoniot (LEH) des céramiques, qui n’est atteinte que dans des conditions de pressions extrêmes. La LEH d’un matériau peut être vue comme le point de transition entre un état élastique et un état élasto-plastique (sous chargement de déformation uniaxiale).
1.4
Comportement dynamique de la glace : expériences et
modé-lisation
1.4.1
Essais de caractérisation
Sensibilité de la résistance en compression uniaxiale à la vitesse de chargement et à la température
Outre des essais d’impacts (qui seront présentés dans la section1.4.2), la majorité des études existantes se sont restreints à la caractérisation de la résistance en compression uniaxiale de la glace. L’utilisation de presses hydrauliques a permis dans un premier temps d’étudier le comportement en compression de la glace à des vitesses de déformations modérées ([100 s−1 : 101 s−1]) (Jones, 1997; Fasanella et al., 2006; Combescure et al., 2011). Une légère augmentation de la résistance en compression a été ainsi observée en comparaison des résultats obtenus sous conditions de chargement quasi-statique. La forte dispersion des contraintes à rupture rend toutefois difficile toute généralisation. Par exemple dans l’étude de Jones
(1997), à une vitesse de déformation de 1 s−1, la résistance en compression peut varier de 6 à 12 MPa selon les essais.
Figure 1.14 – Sensibilité de la résistance en compression uniaxiale de la glace à la vitesse de déformation (Résultats issus de plusieurs études compilés parTippmann et al. (2013))
Pour atteindre de plus grandes vitesses de sollicitation, la méthode de compression simple aux barres d’Hopkinson a été largement plébiscitée (Dutta et al.,1993, 2004;Kim and Keune, 2007;Shazly et al.,
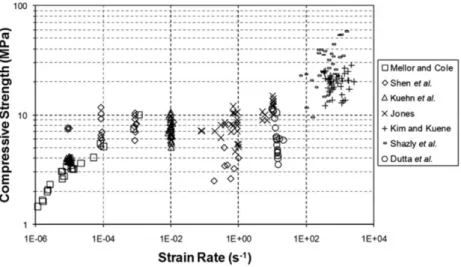
2009;Wu and Prakash,2015b;Song et al.,2016). Les résultats de certaines de ces études ont été compilés parTippmann et al.(2013) et sont montrés sur la figure1.14. Les vitesses de déformation étudiées vont de 10-15 s−1 à 2600 s−1 et l’ensemble des auteurs s’accordent à dire que la résistance en compression de la glace augmente sur cet intervalle. Cependant, la majorité de ces études souffre également d’une très grande dispersion au niveau des contraintes à rupture mesurées. Il est par ailleurs visuellement difficile d’estimer une tendance sur la figure 1.14pour l’intervalle [102 s−1 : 104 s−1]. La seule conclusion claire
étant que la résistance en compression dynamique de la glace est significativement plus élevée sur cet intervalle ([102 s−1 : 104s−1]) que la résistance en compression quasi-statique ( ˙ε < 10−1 s−1).
Dutta et al.(2004) etShazly et al. (2009) ont analysé l’effet de la température et ont noté une légère augmentation de la résistance en compression lorsque la température diminuait de -10◦C à -30◦C/-40◦C. Le travail le plus accompli sur l’influence de ce paramètre est probablement l’étude de Wu and Prakash
(2015a), qui ont évalué la résistance en compression dynamique de la glace jusqu’à des températures cryogéniques. La résistance en compression augmente de façon drastique (de 32 MPa à 112 MPa) avec une diminuation de la température (de -15◦C à -125◦C) jusqu’à atteindre un plateau pour les très basses températures ([-125◦C : -173◦C]).