Ministére de l’Enseignement Supérieur et de la Recherche
Scientifique
Université Mohamed Seddik Benyahia de Jijel
Faculté des Sciences et de la technologie
Département d’Automatique
Mémoire
De Projet de fin d’Etudes pour l’obtention du diplôme de Master en
Automatique et systèmes
THEME
Présentés par :
M.Saba Amine & M.Demiaa Houssame
Soutenu le 27/06/2018 devant le jury composé de
Encadrant : M.Naamane Bounar MCB Co-encadrant : M.Sami Labdai Doctorant Examinateur : M.Boulkroune Abdesselem Professeur
Président : Mme
.Zibra Aicha MAA Promotion 2018
Nos remerciements vont tout, premièrement à Dieu tout puissant qui nous a donné la force, la volonté et surtout le courage pour pouvoir finir ce travail.
Nous tenons à formuler notre gratitude et nos profonds remerciements à notre encadreur Dr. Naamane BOUNAR et co-encadreur M. Sami LABDAI, pour avoir assumé la responsabilité de nous encadrer, et pour son précieux conseil et son aide
durant toute la période du travail.
Nos vifs remerciements vont également aux membres du jury pour l’intérêt qu’ils ont porté à notre travail et ceci en acceptant de l’examiner.
Un très grand merci à Dr. Meriem HALIMI pour sa disponibilité et ses conseils. Nous tenons à remercier vivement tous les enseignants et tous ceux à qui nous
devons notre formation universitaire en général et ceux du département
d’Automatique en particulier.
Des remerciements vont également à tous ceux qui, d’une quelconque façon, ont contribué à la réalisation de ce travail.
Nous remercions tous les étudiants de promo 2018.
Nous dédions ce travail à :
Nos mères, sources de tendresse et d’amours pour
leurs soutiens tout le long de notre vie scolaire.
Nos pères, qui nous ont toujours soutenus et qui
ont fait tout possible pour nous aider.
Nos frères et nos sœurs, que nous aimons
beaucoup.
Notre grande famille.
Nos cher ami (e) s, et enseignants.
Tout qu’on collaboré de près ou de loin à
l’élaboration de ce travail.
Que dieu leur accorde santé et prospérité.
Tables des matières
Liste des figures
Liste des tableaux
Liste des symboles
Introduction général... 1
CHAPITRE I : Présentation des énergies renouvelables
I.1. Introduction ... 3I.2.Energie non renouvelable... 3
I.2.1.Energies fossiles... 3
I.2.2. Energie nucléaire ou atomique... 4
I.3.Différent types d’énergies renouvelables ... 4
I.3.1.Énergie solaire... 5
I.3.2.Énergie hydraulique... 5
I.3.3 .Énergie éolienne ... 6
I.4.Pourquoi l’énergie éolienne ?... 7
I.5. Eolienne dans le monde... 8
I.6 Conclusion... 11
CHAPITRE II : Composition et fonctionnement de l’éolienne
II.1. Introduction... 12II.2.Type d’éolien... 12
II.2.1. Par puissance... 12
II.2.2. Par axe de rotation... 13
II.3.Principaux composant d’une éolienne... 15
II.3.1.Le mat ou la tour... 15
II.3.3.Le rotor ... 16
II.4.Mode de fonctionnement de l’éolienne ... 16
II.5.Conversion de vent en énergie mécanique... 17
II.5.1.Limite de Betz... 19
II.5.2.Coefficient de puissance……… 21
II.6.Modélisation de la turbine... 22
II.6.1.Modèle du multiplicateur... 22
II.6.2.Equation dynamique de l’arbre de la génératrice... 23
II.7.Principe de fonctionnement des machines... 23
II.7.1.Type des générateurs... 24
II.7.1.1.Eoliennes à vitesse fixe... 24
II.7.1.2.Eolienne à vitesse variable... 24
II.7.2.Système utilisant la machine synchrone (MS)... 25
II.7. 3.Système utilisant la machine asynchrone simple (MAS)... 26
II.7.4.Système utilisant la machine asynchrone à double alimentation (MADA)... 27
II.8.Modélisation de la MADA... 28
II.8.1.Présentation de la MADA ... 28
II.8.2. Mode de fonctionnement de la MADA... 29
II.8.2.1 Moteur en hypo/hyper synchronisme ... 30
II.8.2.2 Génératrice en hypo/hyper synchronisme... 30
II.8 .3.Description de la machine asynchrone à double alimentation ... 30
II.8.4. Hypothèses simplificatrices... 31
II.8.5. Equations électriques... 32
II.8.6. Modèle de la machine asynchrone à double alimentation dans le plan dq... 33
II.8.7. Choix du référentiel ... 35
II.8.7.1. Référentiel lie au stator... 36
II.8.7.2. Référentiel lie au rotor... 36
II.8.7.3. Référentiel lie au champ tournant... 36
II.8.8.Mise sous forme d’équation d’état... 37
II.9. Simulation... 38
Chapitre III : Commande linéaire de l’aérogénérateur à base de GADA
III.1.Introduction... 42
III.2.Commande vectorielle de l’aérogénérateur ... 42
III.3. Architecture du dispositif de commande... 43
III.4 Maximum Power Point Tracking (MPPT)……….. 44
III.5. Principe de la commande vectorielle de la GADA... 45
III.6. Modèle de la MADA avec orientation du flux statorique... 46
III.7. Résultats de simulation ... 51
III.7.1.Test sous conditions nominales... 52
III.7.2. Test de robustesse... 54
III.8.conclusion... 57
Chapitre IV :
Commande par backstepping de l’aérogénérateur avec la GADA
IV.1. Introduction... 58IV.2.Stratégie de la commande de l’aérogénérateur... 58
IV .3.Principe de la commande backstepping... 58
IV.4. Backstepping adaptative... 64
IV.4.1: commande adaptative... 64
IV.4.2. Principe de la méthode... 66
IV.5. Principe de la commande par Backstepping adaptative... 67
IV.6. Stratégie de commande de l’aérogénérateur... 72
IV.7.Application de la commande par backstepping à l’aérogénérateur... 74
IV.7.1. Résultats de simulation... 78
IV.7.2.Test sous les conditions nominales... 79
IV.7.3.Test de robustesse... 80
IV.8.Application de la commande Backstepping adaptative... 83
IV.8.2.Test sous les conditions nominales... 87
IV.8.3.Test de robustesse... 89
VI.9. Etude comparative... 91
IV.10. Conclusion... 93
Liste des figures
CHAPITRE I
Figure I.1: Energies renouvelables... 4
Figure I.2: Energie solaire... 5
Figure I.3 : Moulin à eau... 6
Figure I.4: Champs d’éolienne... 6
Figure 1.5: Conversion de l'énergie cinétique du vent... 7
Figure I.6 : Statistiques mondiales : Capacité éolienne installée en MW entre 2001 et 2017... 9
Figure I.7 : Carte de vent en Algérie... 10
CHAPITRE II
Figure II.1 : Description générale d'un système éolien... 12Figure. II.2 : Correspondance taille-puissance des éoliennes... 13
Figure II.3 : Eoliennes à axe vertical... 14
Figure II.4 : éoliennes à axe horizontale... 14
Figure II.5 : composition d’une éolienne... 15
Figure II.6 : vue coupée de la nacelle... 16
Figure II.7 : principe de conversion de l’énergie dans une éolienne... 17
Figure II.8: Colonne d’air animée d’une vitesse ... 18
Figure II.9: Profil de la vitesse du vent... 19
Figure II.10 la limite de Betz : schéma de principe... 19
Figure II.11: évaluation de avec la variation de ……… 22
Figure II.12: Différentes parties de la turbine... 22
Figure II.13: éolienne directement connectée au réseau... 24
Figure II.15: Eolienne à vitesse variable à base d’une machine synchrone... 26
Figure II.16 : Eolienne à vitesse variable à base d’une machine asynchrone simple... 27
Figure II.17 : Eolienne à vitesse variable à base d’une MADA... 28
Figure .II.18 :Structure du stator et des contacts rotoriques de la MADA... 29
Figure II.19 : Les différents modes de fonctionnements de la MADA... 29
Figure II.20 : Représentation schématique de la machine asynchrone à double alimentions... 31
Figure II.21: Représentation de la MADA triphasée dans le repère de Park... 37
Figure II.22 : Schéma bloc de simulation de la MADA alimentée en tension par le réseau... 38
Figure II.23 : Réponses de la machine en mode simple alimentation... 39
Figure (II.24): Réponses de la MADA... 40
Chapitre III
Figure III.10 : résultats de simulation de la commande vectorielle –test de robustesse...56Chapitre IV
Figure(IV.1) : schéma de principe de la commande par bckstepping...59Figure (IV.2) : principe de commande adaptative...65
Figure(IV.3) : commande adaptative directe...65
Figure(IV.4) : commande adaptative indirecte ...66
Figure (IV.5) : Le schéma de commande général non linéaire...78
Figure (IV.6) : Résultats de simulation de la commande par backstepping sous conditions nominales... 80
Figure (IV.7) : Résultats de simulation de la commande par backstepping –test de
robustesse... 82
Figure (IV.8) : Résultats de simulation de la commande par backstepping adaptative sous conditions nominales ... 89
Figure (IV.9) : Résultats de simulation de la commande par backstepping adaptative test de robustesse... 90
List des tableaux
CHAPITRE II
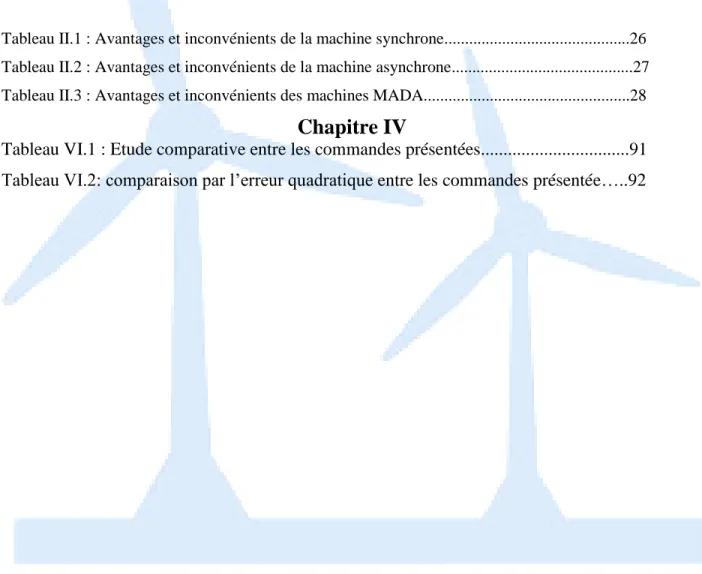
Tableau II.1 : Avantages et inconvénients de la machine synchrone...26 Tableau II.2 : Avantages et inconvénients de la machine asynchrone...27 Tableau II.3 : Avantages et inconvénients des machines MADA...28
Chapitre IV
Tableau VI.1 : Etude comparative entre les commandes présentées...91 Tableau VI.2: comparaison par l’erreur quadratique entre les commandes présentée…..92
: Composantes dans un repère triphasé lié au stator.
: Composantes dans un repère triphasé lié au rotor.
: Composantes dans un repère diphasé.
: Composantes dans un repère diphasé tournant. : Composantes statorique et rotorique.
: Grandeur de référence.
: Grandeur nominale.
: Matrice transposée.
Principaux symboles
: Résistance par phase d’un enroulement au stator (respectivement rotor).
: Indécence propre d’un enroulement stator (respectivement rotor).
: Mutuelle Inductance cyclique.
: Coefficient de dispersion magnétique. : Nombre de paire de pôles.
: Coefficient des frottements visqueux. : Coefficient des frottements.
: Inertie du moteur chargé. : Fonction de Lyapunov.
: Constantes positives.
: Coefficient de proportionnalité. : La constante de temps d’integration. : Densité de l’air.
: Coefficient de puissance. : vitesse spécifique.
Principaux grandeurs
: Couple électromagnétique : Couple résistant. : Couple aérodynamique. : Flux magnétique.: Angle entre un enroulement rotorique et son homologue statorique. : Angle entre la phase a du stator (respectivement rotor) et l’axe d. : vitesse angulaire électrique.
: Pulsation des grandeurs statorique (respectivement rotoriques). : Vitesse de rotation mécanique du rotor.
: Vitesse de rotation du champ statorique. : Vitesse de rotation du champ rotorique. : Puissance active statorique.
: Puissance réactive statorique. : Puissance active rotorique.
: Puissance réactive rotorique.
AC : Alternative Current (courant alternative). DC : Direct Current (courant continu).
MADA : Machine Asynchrone à double alimentation. GADA : Générateur Asynchrone à double alimentation. MAS : Machine Asynchrone.
MS : Machine synchrone.
MPPT : Maximum power point tracking. PI : Proportional integral.
1
Introduction générale
Dans la plus grande partie de l’histoire de l’humanité, on ne dispose que des énergies renouvelables pour couvrir ses besoins énergétiques. Il y a longtemps, les seules énergies disponibles étaient l’énergie biomasse utilisable grâce au feu et la force musculaire humaine. Aujourd’hui, la plupart du monde entier dépend aux ressources des énergies fossiles, aussi appelé ressources traditionnelles.
De nos jours, le besoin croissant à l’énergie électrique et l’épuisement progressif des ressources fossiles ( pétrole, gaz, charbon…) caractérisées par des émissions du gaz carbonique émis lors de leurs combustions ont poussé les chercheurs à penser aux ressources d’énergies durables et plus respectueuses vis-à-vis de l’environnement. Ces ressources sont les éléments essentiels de la nature: le vent, le soleil et l’eau. Ces moyens de substitutions sont appelés « énergies renouvelables ».
Les énergies renouvelables, en pleine expansion, sont l’un des éléments clés du développement durable d’aujourd’hui. Elles offrent la possibilité de produire de l’électricité propre. Parmi ces énergies, on cite principalement les énergies : hydraulique, solaire thermique, photovoltaïque et éolienne.
Par comparaison à autres énergies renouvelables, l'énergie éolienne est l’une de ces derniers la plus sollicitée pour la production de l’énergie électrique, aussi bien pour des sites isolées que comme appoint pour les réseaux connectés. Elle peut être une alternative compétitive contribuant à la réduction de la demande de plus en plus croissante de l'électricité. Le développement de chaines de conversion de l’énergie éolienne ont conduit les industriels et les scientifiques à s’investir dans l’amélioration des indices technico - économiques de cette conversion et la qualité de l'énergie fournie.
Après des années d’évolution et des recherches plus poussées depuis quelques décennies, plusieurs pays se sont, aujourd’hui résolument tournés vers l’énergie éolienne. Les plus avancés dans le domaine sont l’Allemagne, l’Espagne, les Etats-Unis, l’Inde, la Chine et le Danemark Avec certains projets d’énergie éolienne développés.
L’objectif de notre travail est de présenter une étude d’un système de commande d'une chaine de conversion de l’énergie éolienne appelé aérogénérateur ou éolienne à base d’une génératrice asynchrone à double alimentation (GADA) a vitesse variable. Ce choix est
2 justifié par l'intérêt que portent les chercheurs et les industriels à ce type de structures d’éoliennes En effet, le développement actuel dans le domaine des matériaux magnétiques permet une meilleure utilisation des génératrices asynchrones à double alimentation et à moindre coût pour la construction et l’exploitation des éoliennes pour différents conditions du vent. Ensuite, la préoccupation principale de ce type de fonctionnement est le maintien de l’amplitude et la fréquence de la tension générée à des valeurs constantes, quelles que soient la vitesse de rotation de l’éolienne et la puissance demandée. L’ensemble de la chaine de conversion est contrôlé de manière à maximiser en permanence la puissance produite en recherchant le point de fonctionnement a puissance maximum ce qu’on appelle MPPT.
Notre travail s’organise comme suit :
Dans le premier chapitre, nous allons présenter un état de l’art sur les différents types des énergies renouvelables. Ainsi ces principes de conversions en énergie électrique. Enfin, nous présentons l’intérêt de l’énergie éolienne par rapport aux autres énergies.
Le deuxième chapitre est consacré à la modélisation d’un système éolienne à base de GADA. Par la suite nous allons réaliser une simulation du modèle de cette dernière, ceci afin de pouvoir l’insérer dans le système global.
Le troisième chapitre présente une stratégie de commande basée principalement sur la commande vectorielle à base de régulateur PI de l’aérogénérateur.
Le quatrième chapitre abordera le problème de la robustesse de la commande de l’aérogénérateur. Nous présentons une stratégie de commande non linéaire ; à savoir, la commande par backstepping adaptatif. Enfin, une étude comparative entre les différentes lois de commandes présentées sera réalisée.
3
CHAPITRE I : Présentation des énergies renouvelables
I.1 Introduction
L’énergie est essentielle à la vie, Depuis l’antiquité l’homme a utilisé des ressources non renouvelables qui ont progressivement diminué. Aujourd’hui tout le monde dépend de l’énergie d’origine fossile comme, le charbon, le pétrole et le gaz naturel…etc.
Ainsi, au fil des années et des sommets écologiques, les énergies dites « propres » ont été mises en valeur. Il s’agit d’énergies fournies par le soleil ou qui en découlent, comme le vent (énergie éolienne), les chutes d’eau, les végétaux, les marées. C’est ce qu’on appelle des énergies renouvelables. Parmi les énergies renouvelables, l’énergie éolienne est maintenant largement utilisée.
Dans ce chapitre, une présentation des énergies renouvelables ainsi que quelques notions de base sur les différents types d’énergies seront abordés. L’énergie éolienne et son principe de conversion sera étudiée en détails.
I.2 Energie non renouvelable
Les énergies non renouvelables peuvent être divisées en deux catégories [1] :
I.2.1 Energies fossiles
Elles proviennent de la combustion de réserves naturelle, qui se sont formées en plusieurs million d’années à partir de dépôt organique (plantes ou minuscule animaux). Elle se compose principalement de pétrole, gaz naturel et le charbon.
a) Pétrole : c’est la première source d’énergie mondiale. Formé à partir du plancton
qui s’est déposé au fond des mers, le pétrole représente aujourd’hui près de 39% de la consommation mondiale d’énergie primaire dans le monde.
b) Gaz naturel : le constituant principal des gisements de gaz naturel est le méthane. c) Charbon : c’est la source d’énergie fossile la plus abondante et la mieux répartie
dans le monde. Le charbon s’est formé il y a plus de 280 millions d’années à partir de végétaux engloutis par les eaux lors de bouleversements géologiques importants.
4 - Inconvénients des énergies fossiles
Nous pouvons citer les grandes quartes problèmes de l’utilisation de l’énergie fossile :
L’épuisement des réserves.
Les conflits autour de ces réserves.
Les fluctuations des cours des combustibles fossiles en bourse. La combustion des combustibles fossiles contribue à l’effet de serre.
I.2.2 Energie nucléaire ou atomique
Elle provient de l’énergie qui lie les particules des noyaux d’atomes entre eux. Elle tirée d’un minerai radioactif (uranium) [1]. Parmi les inconvénients de l’énergie nucléaire, on cite :
Les déchets radioactifs provenant de centrales nucléaires sont très néfastes pour la santé des êtres vivants.
Des risques d’accidents à conséquences graves sur l’humanité et la planète.
I.3 Différent types d’énergies renouvelables
Les énergies renouvelables sont des modes de production d’énergie utilisant des forces ou des ressources qui sont des ensembles des matières premières ou des phénomènes naturels utilisés pour la production d’énergie dont les stocks sont illimités. Il y en a pleinement d’énergies qui rentrent dans cette catégorie, elles sont classées comme suit (figure I.1) [2] :
Figure I.1: Energies renouvelables
Les énergies renouvelables ont plusieurs ressources, on va donc citer trois ressources fondamentales selon l’importance : énergie solaire, énergie hydraulique et énergie éolienne.
5
I.3.1. Énergie solaire
Deux grand types d’énergies rentrent au-dessous de cette catégorie, la première thermique (figure I.2 (a)) se base sur la température qui permet essentiellement de faire chauffer l’eau, on l’appelle aussi la production combinée de chauffage par plancher chauffant [3]. La deuxième photovoltaïque (figure I.2 (b)) basée sur l’effet photoélectrique [4]. Celui-ci permet de créer un courant électrique continu à partir d’un rayonnement électromagnétique. Cette ressource a donc l’avantage d’être inépuisable et utilisable en tout point d’un territoire.
(a) Énergie solaire thermique (b) Photographies de modules au silicium cristallin
Figure I.2 : Energie solaire.
I.3.2. Énergie hydraulique
L’énergie électrique est produite par la transformation de l’énergie cinétique de l’eau en énergie électrique par l’intermédiaire d’un rotor alternateur relié à un ensemble mécanique situé autour de la roue motrice (figure 1.3). La quantité d’énergie extraite de l’eau retenue derrière un barrage dépend du volume d’eau et de la hauteur de chute. Cette source a l’avantage de ne pas être polluante. On peut maitriser le stockage de l’énergie d’une manière assez simple afin de débarrasser les cours d’eau des déchets grâce aux différents filtres des barrages, la technologie nécessaire pour son utilisation est maîtrisée. Le bruit, l’impact sur la vie aquatique, des installations complexées, et des sites limités pour l’exploitation sont ses principaux inconvénients.
6 Figure I.3 : Moulin à eau.
I.3.3. Énergie éolienne
Le mot éolien vient du Grec (Éole) qui est le dieu des vents. Les éoliennes utilisent l'énergie du vent de façon à la transformer en énergie électrique. Leurs pales sont actionnées par le vent, elles sont reliées à un axe entraîné par leur mouvement et qui actionne une génératrice permettant ainsi de créer de l'énergie électrique [5].
Figure I.4: Champs d’éolienne.
On appelle énergie éolienne, la conversion de la force des vents en énergie mécanique, énergie électrique ou énergie cinétique. (Figure1.5) [6]
7 Figure 1.5: Conversion de l'énergie cinétique du vent.
I.4.Pourquoi l’énergie éolienne ?
L’énergie éolienne est utilisée par l’homme depuis très longtemps. Elle remplaça les rames pour faire avancer les navires, elle fut utilisée pour actionner les meules des moulins, elle permet encore le pompage d’eau pour abreuver les bêtes dans les champs. Depuis plus de 100 ans, elle est utilisée pour produire de l’électricité, source d’énergie fondamentale dans notre société actuelle. L’énergie éolienne est considérée comme la plus prometteuse des énergies renouvelables à développer pour remplacer le charbon, le pétrole, le gaz et même le nucléaire. Ainsi l’homme a souvent besoin d’énergie électrique dans des proportions faibles ou importantes selon l’utilisation qu’il en fait :
Pour faire fonctionner des stations météo ou toutes autres installations électriques isolées à faible consommation, une éolienne de petite taille peut fournir cette énergie tout au long de l’année.
Pour alimenter en éclairage des maisons ou villages dans des endroits isolés et exposés au vent, des installations d’éoliennes de quelques mètres de diamètre sont choses courantes.
Pour alimenter en électricité des villes tout en produisant une énergie propre, on utilise des éoliennes de plusieurs dizaines de mètres de diamètre pouvant produire jusqu’à 4.5 MW [7].
Avantages et inconvénients des énergies éoliennes
L’énergie éolienne a des avantages propres permettant sa croissance et son évolution, ce qui va lui donner un rôle important dans l’avenir à condition d’éviter l’impact créé par ses inconvénients cités ci-après.
8 - Inconvénients
L’impact visuel. Ça reste néanmoins un thème subjectif.
Le bruit, il a nettement diminué, notamment le bruit mécanique qui a pratiquement disparu grâce aux progrès réalisés au niveau du multiplicateur. L’impact sur les oiseaux, certaines études montrent que ceux-ci évitent les aérogénérateurs.
La puissance électrique produite par les aérogénérateurs (éoliennes) n’est pas constante. La qualité de la puissance produite n’est pas toujours très bonne. Le coût élevé (actuellement) de l’énergie éolienne par rapport aux sources
d’énergie classiques.
- Avantages
L’énergie éolienne est avant tout une énergie qui respecte l’environnement. C’est l’énergie la moins chère des énergies renouvelables.
L’énergie éolienne est une énergie renouvelable, c’est à dire que contrairement aux énergies fossiles, les générations futures pourront toujours en bénéficier.
L’énergie éolienne n’est pas non plus une énergie de risque comme l’est l’énergie nucléaire et ne produit évidemment pas de déchets radioactifs.
Les parcs éoliens se démontent très facilement et ne laissent pas de trace. L’énergie éolienne a d’autre part des atouts économiques certains.
I.5. Eolienne dans le monde
A/ Asie : En 2017, l'Asie a conforté son rang en tête du classement des continents par
puissance éolienne installée avec 228 542 MW, soit 42,4 % du total mondial. La Chine à elle seule, avec ses 188 232 MW, représente 82,4 % du total installé en Asie fin 2017. L'Inde suit loin derrière avec 32 848 MW (14,4 % du cumul)
B/ Europe : En 2017, la puissance cumulée a dépassé 169 GW. Ainsi l’Europe occupe la
deuxième place du classement des continents par puissance éolienne installée. L’Allemagne est encore le pays où l’éolien est le plus développé avec un cumul de puissance éolienne installée de 56,1 GW fin 2017, devant le Royaume-Uni (avec 18,9 GW fin 2017) et la France (13,8 GW à fin 2017). , Au Danemark, la production éolienne de 2017 équivaudrait même à
9 44% de la demande électrique nationale (cette production n’intervenant toutefois pas nécessairement aux heures de consommation).
C/ Amérique En 2017, l'Amérique est placée au 3e rang du classement des continents par
puissance éolienne installée avec 123 212 MW, soit 22,8 % du total mondial, dont 105 321 MW pour l'Amérique du Nord et 17 891 MW pour l'Amérique. Les États-Unis restent largement en tête avec 89 077 MW, soit 72,3 % du total du continent américain ; [8].
Figure I.6 : Statistiques mondiales : Capacité éolienne installée en MW entre 2001 et 2017.
D/ Afrique : L’Afrique du sud se place au 1er rang avec 2 094 MW installés fin 2017, soit
46 % du total africain. L'Égypte se place au second rang en Afrique avec 810 MW fin 2017, suivie du Maroc avec 787 MW ; au 4e rang arrive l'Éthiopie avec 324 MW, suivie de la Tunisie avec 245 MW. En Algérie, l’éolien reste peu développé. Dans le cadre de la première phase du programme de développement des énergies renouvelable, une première ferme éolienne de 10 MW a été inaugurée en 2014. Le gouvernement algérien a adopté fin février 2015 son programme de développement des énergies renouvelables 2015-2030. Ce programme prévoit la production de plus de 5010 MW d’énergie éolienne d’ici 2030.
Potentiel national d’énergie éolienne
L’Algérie à l’instar des autres pays essaye de percer dans le domaine des énergies renouvelables et l’énergie éolienne en particulier. Une étude préliminaire de l’évolution
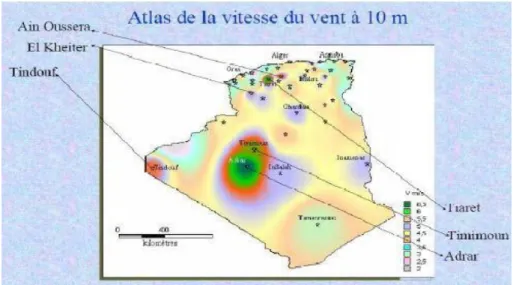
10 saisonnière et annuelle de la vitesse moyenne du vent a permis de faire une première identification des régions ventées de l’Algérie. Cette représentation de la vitesse sous forme de carte, a deux objectifs : le premier est d’identifier les vastes régions avec de bonnes promesses d’exploitation de l’énergie éolienne. Le second est de mettre en évidence la variation relative de la ressource à travers le pays. La carte représentée dans la figure (I.7) montre que le sud est caractérisé par des vitesses plus élevés que le nord, plus particulièrement le sud-ouest avec des vitesses supérieures à 4 m/s et qui dépassent la valeur de 6 m/s dans la région d’Adrar.
Figure I.7 : Carte de vent en Algérie.
Concernant le nord, la vitesse moyenne est globalement peu élevée. Il est noté cependant, l’existence de microclimats sur les sites côtiers d’Oran, Bejaia et Annaba, sur les hauts plateaux de Tiaret et El kheiter ainsi que dans la région délimitée Bejaia au nord et Biskra au sud. Toutefois, la vitesse du vent subit des variations en fonction des saisons qui ne doit pas négliger, en particulier, lorsqu’il s’agit d’installer des systèmes de conversion de l’énergie éolienne. La réalisation d’une carte saisonnière a montré clairement que l’automne et l’hiver sont moins ventée. Néanmoins, il faut remarquer que la région de Tiaret fait l’exception avec une vitesse plus faible en été qu’en hiver [9].
11
I.6 Conclusion
Dans ce chapitre nous avons donné une présentation détaillée des différentes sources d’énergies renouvelables existantes, telles que l’énergie hydraulique, solaire, éolienne. Ainsi l’utilisation des énergies renouvelables est une clé de développement durable. Aujourd'hui, l’énergie éolienne est parfois considérée comme la plus prometteuse des énergies renouvelables à développer pour remplacer le charbon, le pétrole, le gaz et même le nucléaire.
12
CHAPITRE II : Composition et fonctionnement de l’aérogénérateur
II.1. Introduction
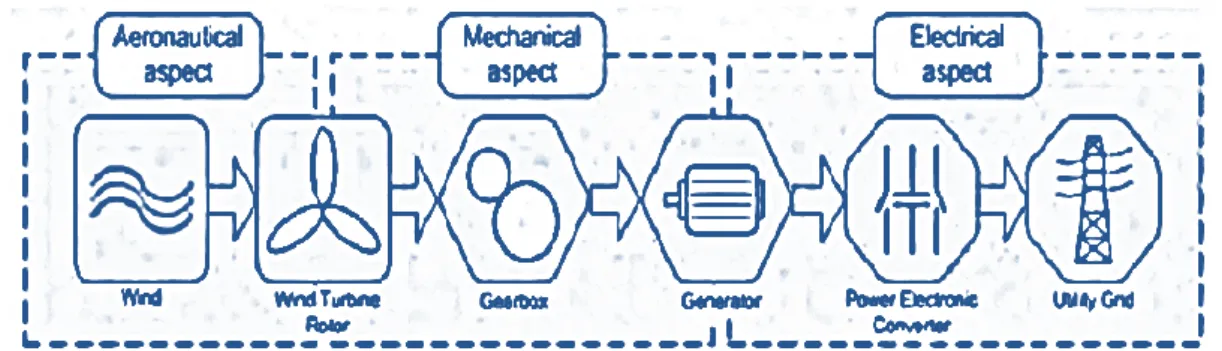
Un aérogénérateur, plus couramment appelé éolienne, est un dispositif qui transforme une partie de l’énergie cinétique du vent en énergie mécanique disponible sur un arbre de transmission puis en énergie électrique par l’intermédiaire d’une génératrice. Dans ce chapitre, on s’intéresse essentiellement aux différents types d’éoliennes avec leurs constitutions et leurs principes de fonctionnement, ainsi qu’à l’étude de l’énergie cinétique du vent et les déférents types de génératrices associées. L’accent sera mis sur la machine asynchrone à double alimentation (MADA) vu son intérêt par rapport aux autres types de machines utilisées comme génératrices dans les systèmes éoliens.
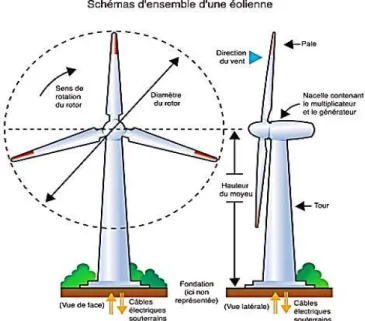
Figure II.1 : Description générale d'un système éolien.
II.2. Type d’éolien
Il existe plusieurs types d’éoliennes, qui diffèrent selon la puissance produite. La puissance est directement fonction de la hauteur de l’éolienne et de la longueur de ses pales, c’est pourquoi ces différents systèmes correspondent à des tailles différentes. Donc, on peut classifier les éoliennes par différents critères.
II.2.1. Par puissance
Selon leur puissance nominale, les éoliennes sont divisées en trois catégories [10].
Eoliennes de petite puissance : inférieure à 40 kW.
13 Eoliennes de forte puissance : supérieure à 1 MW.
La figure (II.2) illustre la correspondance taille-puissance des éoliennes.
Figure. II.2 : Correspondance taille-puissance des éoliennes.
II.2.2. Par axe de rotation
Il existe 2 types d'éolienne : l'éolienne verticale et l'éolienne horizontale.
-Eoliennes à axe vertical
Également nommée VAWT (Vertical Axis Wind Turbine), les pales tournent autour d'une tige positionnée verticalement, comme son nom l'indique. Selon leur principe aérodynamique , on trouve les éoliennes basées sur la "portance" dont la plus connue est le modèle de "Darrieus"(a) et, d'autre part, les éoliennes basées sur la "trainée" dont la plus connue est le modèle de "Savonius"(b).
Relation entre le diamètre du rotor des éoliennes et leurs
puissances.
Hauteur 142m
14 Figure II.3 : Eoliennes à axe vertical.
-Éoliennes à axe horizontal
L'éolienne horizontale, également appelée HAWT (Horizontal Axis Wind Turbine), elle est fixée au sommet d’une tour, ce qui permet de capter une quantité plus importante d’énergie éolienne. Le nombre des pales de ce type d’éolienne varie classiquement entre 1 et 3, le rotor tripale est le plus utilisé car il représente un bon compromis entre le coefficient de puissance, le coût, le comportement vibratoire et le bruit [11].
Figure II.4 : éoliennes à axe horizontale.
L’éolienne à axe horizontal possède une plus grande efficacité de conversion de l’énergie éolienne en raison de la conception des pales et à l’accès du vent. Ainsi, la régulation de la
(b) (a)
15 puissance par le décrochage et le contrôle de l’angle d’inclinaison à des vitesses de vent élevées.
II.3. Principaux composant d’une éolienne
Une éolienne est constituée de trois éléments principaux : le mat, la nacelle et le rotor. Ces éléments peuvent être mécaniques ou électriques, comme il est illustré dans la figure(II.6).
Figure II.5 : composition d’une éolienne.
II.3.1. Le mat ou la tour
C’est un tube d’acier ou de béton armé, il doit être le plus haute possible pour bénéficier du maximum de l’énergie cinétique du vent et d’éviter les perturbations près du sol. Au sommet du mat se trouve la nacelle [12].
II.3.2. La nacelle
Montée au sommet du mat et constituée des composants essentiels à la conversion d’énergie Figure II.7
16 Figure II.6 : vue coupée de la nacelle.
La nacelle formée des éléments suivants [12] :
-Le multiplicateur : sers à adapter la vitesse de la turbine éolienne à celle de générateur
électrique.
- Le système de refroidissement : se compose en général d’un ventilateur électrique
utilisé pour refroidir le générateur, et d’un refroidisseur à l’huile pour le multiplicateur
-La génératrice électrique : l’élément fondamental pour la conversion mécano-électrique
qui est généralement une machine synchrone, asynchrone a cage ou a rotor bobiné.
-L’arbre : relie le moyeu au multiplicateur, il contient un système hydraulique permettant
le freinage aérodynamique en cas de besoin.
-Le système d’orientation des pales : sert à la régulation de la puissance. En plus de ces
éléments, la turbine est munie les pales fixe ou orientable et qui tournent à des vitesses nominales inferieures à 40 tr/min.
II.3.3. Le rotor
Formé par les pales assemblées dans leur moyeu. Il transforme l’énergie du vent en énergie mécanique.
II.4. Mode de fonctionnement de l’éolienne
Les éoliennes sont conçues pour produire de l’électricité à un prix aussi bas que possible. Leurs conditions de fonctionnement dépendent essentiellement des conditions de vent sur
17 lesquelles aucune action n’est possible. Par conséquent, on ne peut agir qu’en limitant, de manière optimale dans certaines conditions, et toujours de manière stricte dans d’autres conditions, l’énergie effectivement convertie par la turbine puis par le générateur électrique, avant transfert vers le réseau.
Le principe de fonctionnement de l’énergie éolienne est relativement simple : Le vent fait tourner des pales qui font elles même tourner le générateur de l’éolienne. A son tour le générateur transforme l’énergie mécanique du vent en énergie électrique de type éolienne. L’électricité éolienne est dirigée vers le réseau électrique ou vers des batteries de stockage d’électricité éolienne.
Figure II.7 : principe de conversion de l’énergie dans une éolienne.
II.5. Conversion de vent en énergie mécanique
La turbine éolienne est un dispositif qui transforme l’énergie cinétique du vent en énergie mécanique. L’énergie cinétique d’une colonne d’air de longueur , de section , de masse volumique ρ, animée d’une vitesse v s’écrit [13] :
(II.1)
18 Figure II.8: Colonne d’air animée d’une vitesse
La puissance extraite du volume d’air en mouvement est la dérivée de l’énergie cinétique par rapport au temps [14].
En supposant , on déduit l’expression de
(II.2)
Où
=1.22kg/m est la masse volumique de l’air (en Kg/3 ), est la vitesse instantanéedu vent (en m/s) et est l’énergie cinétique du vent (en joules).
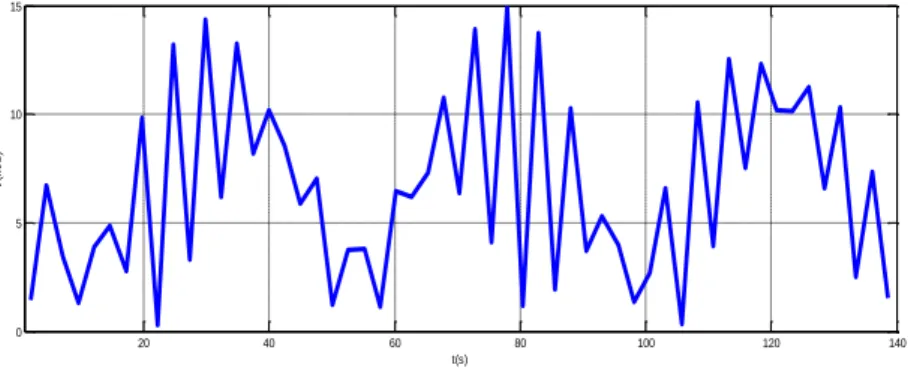
La vitesse du vent peut être modélisée par une somme de plusieurs harmoniques [12].
( ) ∑ ( ) (II.3)
où est la vitesse moyenne du vent est constante. et sont des constantes et est la
pulsation de l’échantillon du vent. y
19 Figure II.9: Profil de la vitesse du vent.
II.5.1. Limite de Betz
La limite de Betz détermine qu’une éolienne ne pourra jamais convertir en énergie mécanique plus de 16/27 (ou 59%) de l’énergie cinétique contenue dans le vent. Ce fut l’Allemand Albert Betz qui, en 1929, formula la loi de Betz pour la première fois [15], [16]. Il suppose que« Le moteur éolien est placé dans un air animé à l’infini amont d’une vitesse et à l’infini aval d’une vitesse » Considérons le système éolien à axe horizontal représenté sur la Figure (II.11) sur lequel on a représenté la vitesse du vent
ܸ en amont de l'aérogénérateur et la vitesseܸ en aval. En supposant que la vitesse
du vent traversant le rotor est égale à la moyenne entre la vitesse du vent non perturbé à l’avant de l’éolienne.
Figure II.10: La limite de Betz : schéma de principe. En appliquant la conversion de masse au cas de la figure (II.10) [15].
(II.4) 20 40 60 80 100 120 140 0 5 10 15 t(s) V (m /s )
20 La force de portance au rotor de la turbine d’après le théorème d’EULER est donnée par [13] [16].
(II.5) De l’équation précédente (II.5), nous aurons
( ) (II.6) D’où la puissance absorbée par l’aérogénérateur :
( ) (II.7)
La vitesse du vent traverse le rotor est donnée par :
(II.8)
On définit le facteur fractionnaire de diminution dans la vitesse du vent entre la position 1 et la positon 0 par :
(II.9)
De (II.6) et (II.8), l’équation (II.5) devient :
( ) (II.10) La puissance extraite du vent par le rotor :
( ) (II.11)
Un vent théoriquement non perturbé traverserait cette même surface sans diminution de vitesse, soit à la vitesse , la puissance correspondante serait alors :
(II.12) Le ratio entre la puissance extraite du vent et la puissance totale théorique est appelé coefficient de puissance :
( ) (II.13)
La valeur théorique maximale de est donnée par la limite de Betz, c’est la dérivé de
21
(II.14)
En remplaçant dans l’équation (II.13) on trouve :
II.5.2. Coefficient de puissance
Le Coefficient de puissance (facteur de capacité) est le rapport entre la production annuelle et la production maximale possible techniquement d´une éolienne. Il est à noter que les éoliennes ne sont pas principalement conçues pour un Coefficient de puissance optimale, mais pour générer autant d'électricité que possible à une certaine vitesse de vent. Coefficient de puissance 30-40% sont considérés comme très élevés pour les régions côtières.
La puissance cinétique associée à une circulation d’une masse d’air à une vitesse et agissant sur une surface , de la roue d'une éolienne s'écrit [17].
(II.15)
La puissance de la masse d’air qui traverse la surface équivalent à la surface active de l’éolienne est donnée par la relation suivante:
( ) (II.16)
Le rapport entre la vitesse des pales et la vitesse du vent est :
(II.17)
Est la vitesse de la turbine.
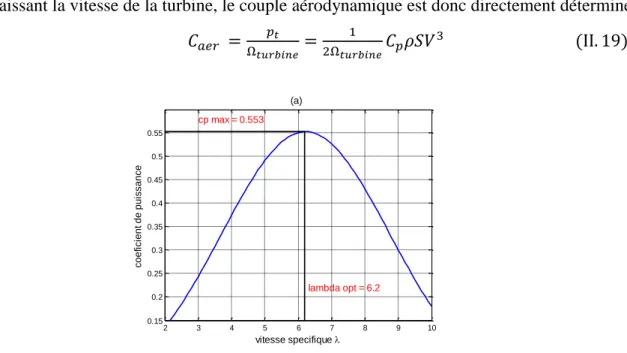
Dans notre étude nous avons choisi le modèle d’une éolienne de 7.5 à tripale, dont le longueur d’une pale est de 3 , et la gain de multiplicateur égale à 8. Pour ce type de la turbine l’expression de coefficient de puissance est une approximation gaussienne [12].
22 ( ) ( ) ( )
Le maximum de coefficient ( ) est atteint pour la valeur de la vitesse
relative . Avec cette valeur la turbine fonctionne avec le rendement maximum théorique, comme il est illustré dans la figure (II.11) :
Connaissant la vitesse de la turbine, le couple aérodynamique est donc directement déterminé par :
( )
Figure II.11: évaluation de avec la variation de .
II.6. Modélisation de la turbine
Considérons une éolienne munie de pales de longueur entrainant une génératrice à travers un multiplicateur de vitesse de gain .
Figure II.12: Différentes parties de la turbine
II.6.1. Modèle du multiplicateur
Le multiplicateur est un dispositif de liaison entre la turbine et le générateur. Il est supposé rigide et défini par un simple gain . Les pertes énergétiques dans le multiplicateur sont
2 3 4 5 6 7 8 9 10 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 cp max = 0.553 lambda opt = 6.2 (a) co e fi ci e n t d e p u issa n ce vitesse specifique
23 considérées nulles. Le multiplicateur adapte la vitesse de la turbine à celle du générateur considérées nulles. Le multiplicateur adapte la vitesse de la turbine à celle du générateur, ce qui permet d’obtenir les relations suivantes :
(II.20)
(II.21)
Où représente l’effet du couple de la turbine sur l’arbre de la génératrice, et est le gain de multiplicateur.
II.6.2. Equation dynamique de l’arbre de la génératrice
L’équation fondamentale du moment du couple dynamique permet de déterminer l’évolution de la vitesse à partir du couple mécanique total ( ) appliqué au rotor [15]:
(II.22) L’évaluation de la vitesse dépend du couple mécanique appliqué au rotor de la génératrice qui est résultant de couple de la génératrice ( ), couple de frottement visqueux ( ) et un couple de multiplicateur ( ).
Le couple mécanique est la somme de tous les couples appliqués sur le rotor :
(II.23) Est le couple résistant dû aux frottements peut donner par :
(II.24)
Où est le coefficient de frottement total du couplage mécanique. En remplace (II.24) dans (II.23), on obtient :
(II.25)
II.7. Principe de fonctionnement des machines
Une machine électrique est constitué d'un stator, la partie fixe, et d'un rotor, la partie mobile. Celle-ci comporte un bobinage qui, alimenté par un courant électrique, induit un
24 champ magnétique. Les pôles du rotor, pouvant tourner librement, s'alignent avec ceux du stator : les pôles positifs attirent les négatifs, et inversement. Ainsi, le rotor continue de tourner entrainant avec lui l'axe du moteur, qui entraine alors une machine (ici, une hélice). Pour obtenir un moteur à vitesse variable, il faut l'alimenter avec un variateur. En changeant la fréquence du courant, il change la vitesse de rotation.
II.7.1. Type des générateurs
Un aérogénérateur est un dispositif utilisé pour le transfert de l’énergie cinétique du vent vers l’arbre de transmission en mouvement rotatif. Plusieurs types existent, ils se caractérisent par la position de leur axe de rotation et des performances qui leurs sont propres. On note : les éoliennes à vitesse fixe et les éoliennes à vitesse variable.
II.7.1.1. Eoliennes à vitesse fixe
La génératrice (généralement une machine asynchrone à cage d’écureuil) est reliée directement au réseau sans convertisseur de puissance, sa vitesse mécanique est fixe et imposée par la fréquence de travail du réseau et/ou par le nombre de pair de pôles de la génératrice. Il nous faut alors un système d’orientation des pales de l’aérogénérateur pour avoir un fonctionnement au voisinage de synchronisme et aussi un multiplicateur de vitesse pour adapter la vitesse de la turbine à celle de la génératrice.
Figure II.13: éolienne directement connectée au réseau
II.7.1.2. Eolienne à vitesse variable
L’éolienne à vitesse variable connectée au réseau est composée d’une turbine, un multiplicateur, un générateur, un convertisseur de puissance. La partie électrique de
25 l’éolienne, en général, consiste en un générateur électrique synchrone ou asynchrone. Les machines synchrones : elles sont utilisées dans la plupart des procédés traditionnels de production d’électricité, notamment dans ceux de très grande puissance (centrales thermiques, hydrauliques ou nucléaires). Les générateurs synchrones utilisés dans le domaine éolien, ceux de 500 à 2 sont bien plus chers que les générateurs à induction de la même taille .
-Intérêt de la vitesse variable
L’ensemble des caractéristiques donnant la puissance disponible en fonction de la vitesse de rotation du générateur pour différentes vitesses de vent est illustré sur la figure suivante.
En vitesse variable, on régule le système de façon à ce que pour chaque vitesse de vent, l'éolienne fonctionne à puissance maximale. C'est ce qu'on appelle le Maximum Power Point Tracking (MPPT). La puissance maximale est atteinte pour une vitesse de rotation de la turbine donnée par la caractéristique de l’éolienne.
Figure II.14: Puissance théorique disponible au niveau de la turbine éolienne.
II.7.2. Système utilisant la machine synchrone (MS)
C’est ce type de machine qui est utilisé dans la plupart des procédés traditionnels de production de l’électricité. Lorsque ce type de machine est directement connecté au réseau ; sa vitesse de rotation est fixe et proportionnelle à la fréquence du réseau. En conséquence de cette grande rigidité de la connexion générateur-réseau, les fluctuations du couple capté par l’aérogénérateur se propagent sur tout le train de puissance, jusqu’à la puissance électrique produite. C’est pourquoi les machines synchrones ne sont pas utilisées dans les
60 80 100 120 140 160 180 200 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 4 m/s 5 m/s 6 m/s 7 m/s 8 m/s 9 m/s 10 m/s vitesse de rotation p u issa n ce d e l a t u rb in e
26 aérogénérateurs directement connectés au réseau. Lorsque sont utilisées, elles sont connectées au réseau par l’intermédiaire de convertisseurs de puissance [18].
Figure II.15 : Eolienne à vitesse variable à base d’une machine synchrone.
Le Tableau II.1 résume les principes avantages et inconvénients de la Machine Synchrone
Avantages Inconvénients
Puissances extraite optimisée pour les vents faibles et moyens.
Absence de boite de vitesse.
Sur la plage de vitesse, fonctionne à vitesse variable.
La machine a un grand diamètre. Machine spécifique.
Le dimensionnement des convertisseurs est effectué pour transiter la totalité de la puissance nominale (le prix augmente)
Tableau II.1 : Avantages et inconvénients de la machine synchrone.
II.7. 3.Système utilisant la machine asynchrone simple (MAS)
La machine asynchrone à cage d’écureuil est connectée directement au réseau électrique, la puissance fournie au celui-ci ne peut pas être optimal car la machine n’a pas la possibilité de fonctionner à vitesse variable. La figure (II.17) illustre une structure d’une éolienne à vitesse variable utilisant la même machine. Le stator de la machine est connecté au réseau électrique par l’intermédiaire d’un convertisseur de puissance qui permet de contrôler et de varier la vitesse de la machine afin de fournir Une puissance maximale au réseau électrique.
27 Figure II.16 : Eolienne à vitesse variable à base d’une machine asynchrone simple.
Le Tableau II.2 résume les principes avantages et inconvénients de la MAS.
Avantages Inconvénients
Puissances extraite optimisée pour les vents faibles et moyens.
Le dimensionnement des convertisseurs est effectué pour transiter la totalité de la puissance nominale (le prix augmente)
L’augmentation des pertes des convertisseurs de puissance
Tableau II.2 : Avantages et inconvénients de la machine asynchrone.
II.7.4. Système utilisant la machine asynchrone à double alimentation (MADA)
La machine asynchrone à double alimentation (MADA) avec rotor bobiné présente un stator triphasé identique à celui des machines asynchrones classiques et un rotor contenant également un bobinage triphasé accessible par trois bagues munies de contacts glissants. Intégrée dans un système éolien, la machine a généralement son stator connecté au réseau et l’énergie rotorique varie selon différents systèmes décrits ci-dessous. Les convertisseurs utilisés sont alors dimensionnés pour une fraction de la puissance nominale de la machine.
28 Figure II.17 : Eolienne à vitesse variable à base d’une MADA.
Le Tableau II.3 résume les principes avantages et inconvénients de la MADA.
Avantages Inconvénients
Fréquence fixe quel que soit la vitesse du vent
Les convertisseurs sont dimensionnés à 30% de la puissance nominale
La puissance maximale est exploitée pour toutes les vitesses du vent (régulation de λ optimal pour avoir Cp maximum)
Maintenance du multiplicateur Commande complexe
Oscillations mécanique
Tableau II.3 : Avantages et inconvénients des machines MADA
II.8. Modélisation de la MADA
II.8.1. Présentation de la MADA
La machine asynchrone à double alimentation présente un stator analogue à celui des machines triphasées classiques (asynchrone à cage ou synchrone). L'originalité de cette machine provient du
29 fait que le rotor n'est plus une cage d'écureuil coulée dans les encoches d'un empilement de tôles mais il est constitué de trois bobinages connectés en étoile dont les extrémités sont reliées à des bagues conductrices sur lesquelles viennent frotter des balais lorsque la machine tourne (Figure. II.18).
FigureII.18 : Structure du stator et des contacts rotoriques de la MADA
II.8.2. Mode de fonctionnement de la MADA
Contrairement à la machine asynchrone classique, qui ne peut fonctionner en moteur qu’en dessous de sa vitesse de synchronisme et ne peut être en générateur qu’au-dessus de cette vitesse, la MADA a la possibilité de fonctionner en hyper synchronisme ou en hypo synchronisme aussi bien en mode moteur qu’en mode générateur. On a donc quatre modes opérationnels caractéristiques de la machine. Les différents modes de fonctionnement de la MADA sont décrits ci-dessous (Figure II.19) :
30
II.8.2.1 Moteur en hypo/hyper synchronisme - Moteur en hypo synchronisme
L'énergie absorbée du réseau (figureII.19(1)) est transformée partiellement en énergie mécanique. L’autre partie est injectée au réseau à travers les contacts glissants du rotor. Pour les moteurs à cage, l'énergie de glissement est dissipée en pertes Joule dans le rotor.
- Moteur en hyper synchronisme
La puissance statorique est fournie par le réseau (figureII.19(2)) ainsi que la puissance de glissement. Les machines à cage ne peuvent avoir ce type de fonctionnement car celui-ci ne peut être obtenu qu’à l’aide d’un accès au rotor via un circuit électronique.
II.8.2.2 Génératrice en hypo/hyper synchronisme - Génératrice en hypo synchronisme
L’énergie mécanique est transmise à l’arbre de la machine, celui-ci la fournit au stator, lequel la transmet au réseau (figure II.19(3)). Afin de permettre un fonctionnement hypo synchronisme, l’énergie de glissement, provenant du réseau, se doit d’être transmise au rotor. Ainsi pour le fonctionnement générateur hypo synchronisme, une alimentation du circuit rotorique à fréquence variable permet de délivrer une fréquence fixe au stator même en cas de variation de la vitesse de rotation. Il est évident qu’un moteur à cage ne peut avoir ce type de fonctionnement, car celui-ci n’a pas d’accès permettant un apport de puissance au rotor.
- Génératrice en hyper synchronisme
La puissance fournie au réseau (figureII.19(4)) par le stator et la puissance de glissement est récupérée via le rotor pour être réinjectée au réseau. On a donc le fonctionnement générateur au-dessus de la vitesse de synchronisme. La machine asynchrone a cage classique peut avoir se mode de fonctionnement, mais dans ce cas la puissance de glissement est dissipée en pertes joule dans le rotor.
II.8 .3. Description de la machine asynchrone à double alimentation :
La machine asynchrone double alimentée dont on étudie la mise en équations correspond à la structure de principe représentée sur la Figure (II.20). Les armatures magnétiques du stator et du rotor sont cylindriques, séparée par un entrefer constant, et munies chacune d’un
31 enroulement triphasé. Le stator comporte 3 enroulements dont les axes magnétiques , et sont décalés dans l’espace de 120°. Le rotor (rotor bobiné) comporte 3 enroulements
triphasés à même nombre de pôles que celui du stator. Ces 3 bobinages dont les axes magnétiques , et sont décalés dans l’espace de 120°.
Figure II.20 : Représentation schématique de la machine asynchrone à double alimentations.
II.8.4.Hypothèses simplificatrices
Pour la modélisation de la MADA, on adopte les hypothèses simplificatrices suivantes : Le circuit magnétique n’est pas saturé, ce qui permet d’exprimer les flux
comme fonctions linéaires des courants.
Les pertes par hystérésis et courant de Foucault sont négligeables. On se limite au premier harmonique d’espace de la distribution de force
magnétomotrice criée par chacune phase du stator et du rotor, d’où résulte du fait que l’entrefer est constant, que les inductances mutuelles entre deux enroulements varient sinusoïdalement en fonction de l’angle entre leurs axes magnétiques et les inductances propres sont constantes.
Les résistances ne varient pas avec la température et l’effet de peau est négligé. Les pertes mécaniques sont négligeables.
L’influence de l’échauffement sur les caractéristiques n’est pas prise en compte. Ces hypothèses ont pour conséquences :
- les inductances propres entre les enroulements statoriques sont constantes. - les inductances propres entre les enroulements rotoriques sont constantes.
32
II.8.5.Equations électriques
Avec les hypothèses citées ci-dessus, les équations des tensions des phases statorique et rotoriques qui décrivent le fonctionnement de la machine s’écrivent comme suit :
{[ ] [ ] [ ]
[ ] [ ] [ ] (II.26) Les flux sont donnés par :
{[ [ ] [ ] [ ] [ ] [ ][ ] ] [ ] [ ][ ] (II.27) Avec : [ ] [ ] ,[ ] [ ] ,[ ] [ ] , [ ] [ ] (II.28) Tel que :
[ ] : Vecteur des tensions statoriques et [ ] : Vecteur des courants statoriques.
[ ] : Vecteur des tensions rotoriques et [ ] : Vecteur des courants rotoriques. Et
[ ] ( ) , [ ] ( ) (II.29) où et sont respectivement les résistances rotoriques et statoriques.
[ ] Est la matrice des inductances statoriques, elle est donnée par :
[ ] [ ] (II.30)
[ ] Est la matrice des inductances rotoriques, elle est donnée par :
33 , Inductance propre d’une phase statorique, rotorique. Inductance mutuelles entre deux phases statoriques et deux phases rotoriques.
Inductances mutuelles maximale entre deux phases statoriques et deux phases rotorique.
La matrice des inductances mutuelles (matrice de couplage rotor-stator) s’écrit :
[ ] [ ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ] (II.32) avec: [ ] [ ]
En remplaçant (II.27) dans (II.26), on obtient le système suivant :
{[ ] [ ] [ ] [ ] [ ] ([ ][ ]) [ ] [ ] [ ] [ ]
[ ] ([ ][ ])
(II.33)
-Equations mécanique de la machine
Le couple électromagnétique est donné par l’expression générale suivante :
[ ] ([ ][ ]) (II.34)
Donc l’équation mécanique de la machine s’écrit :
(II.35) La résolution analytique dans ce repère est très difficile car le système d’équation est à
coefficients variables en fonction de (angle de rotation de la machine).
II.8.6. Modèle de la machine asynchrone à double alimentation dans le plan dq
Le but d’un changement de repère est de rendre l’écriture des équations électriques et mécanique plus simple à exploiter. Dans notre étude nous avons utilisé la transformation de Park. La transformation de Park consiste à transformer les enroulements statoriques et rotoriques en enroulements orthogonaux équivalents, afin d’obtenir un modèle mathématique plus simple que le modèle physique du système [19] [20].
34 Figure II.21: Représentation de la MADA triphasée dans le repère de Park. Les deux bobines d et q, produisent le même effet que les trois bobines réelles fixes.
d : axe directe stator et rotor. q : axe en quadrature stator et rotor.
La matrice de transformation est définie par :
[ ] √ [ ( ) ( ) ( ) ( ) ( ) ( ) √ √ √ ] (II.36)
où est l’angle entre l’axe et l’axe de référence dans le système triphasé ( pour les grandeurs statorique et pour les grandeurs rotorique).Tous les équations électrique de la MADA sont d’écrit dans le repère .
Le passage du système biphasé au système triphasé est défini par le produit matriciel suivant :
[ ] [ ( )] [
] (II.37)
Les tensions rotoriques , , et les tensions statoriques , , sont transformées en
composantes directes et en quadratures , , , . Les tensions statoriques et rotoriques
35 * + [ ( )] [ ] , * + [ ( )] [ ] (II.38)
Les équations dynamiques de la machine sont exprimées par :
{ (II.39) Avec :
est la pulsation électrique statorique,
est la pulsation
électrique rotorique. et sont respectivement les résistances des bobinages statoriques et rotoriques. , , , Sont les composantes directs et en quadratures des flux statoriques et rotoriques. { (II.40)
L’expression générale du couple électromagnétique résulte de la dérivée de la Co-énergie
par rapport à l’angle mécanique de rotation. Dans le repère ( ) l’équation devient :
( ) (II.41)
Avec est le nombre de pair du pôles, Inductance propre statorique.
A noter qu’en conversion générateur le couple résistant sera remplacé par le couple moteur , qui issu du multiplicateur dans notre système procédé d’un signe (+) dans l’équation (II.23) et le couple sera procédé d’un signe (-).
II.8.7. Choix du référentiel
Le choix du référentiel dépend du problème à étudier. Il existe trois types de référentiel pour la machine asynchrone dont le choix dépend du type de problème à étudier.
36
II.8.7.1. Référentiel lie au stator
Ce repère de référence est le mieux adapté pour les grandeurs instantanées. Il est utilisé pour l’étude des variations importantes de la vitesse de rotation de la machine [12]. Il est caractérisé par : , , { (II.42)
II.8.7.2. Référentiel lie au rotor
Ce référentiel est choisi pour étudier les problèmes durant les régimes transitoires où la vitesse de rotation est constante. Il est caractérisé par : , , et 0.
{ (II.43)
II.8.7.3. Référentiel lie au champ tournant
Ce référentiel est souvent utilisé dans le cas où la fréquence d’alimentation est constante. Ce qui justifie sa large utilisation dans le domaine de la commande des machines asynchrones. Il est caractérisé par : , ,
et ( ) . { ( ) ( ) (II.44)
37 Dans notre étude, nous avons opté pour le repère immobile par rapport au stator. C’est le référentiel le mieux adapté pour travailler avec les grandeurs instantanées ; il possède des tensions et des courants réels et peut être utilisé pour étudier les régimes de démarrage et de freinage des machines à courant alternatif.
II.8.8. Mise sous forme d’équation d’état
Pour obtenir le modèle complet de MADA, on remplace les expressions des flux dans les équations de tension, on obtient quatre équations électriques en fonction des composantes des courants et/ou flux statorique et rotorique, l’association mécanique aux quatre équations électrique donne le modèle de la machine asynchrone à double alimentation dans le repère de Park. En choisissant le vecteur d’état ( ) et les grandeurs et
comme entrées de commande on obtient le modèle sous forme de représentation d’état :
{ ( ) ( ) (II.45) , ( ) , et ( )
Par ailleurs, les puissances active et réactive statorique est données par :
Puissances statoriques : { ( ) ( ) (II.46) Puissances rotoriques : { ( ( ) ) (II.47) , sont les flux statorique et rotorique diphasés dans un repère tournant. est la
vitesse de rotation de la machine.
38 Figure II.22 : Schéma bloc de simulation de la MADA alimentée en tension par le réseau
II.9. Simulation
Nous présentons dans cette partie les résultats de simulation en boucle ouverte de la MADA, le stator est directement connecté au réseau, tandis que le rotor alimenté par une source de tension a fréquence et amplitude variable.
Mode simple : le rotor est court-circuit, on dit que la machine fonctionne en mode
simple(MAS) Avec : 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -10 0 10 20 30 40 50 60 70 80 courant rotorique temps(s) Iq r( A ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -50 -40 -30 -20 -10 0 10 20 courant rotorique temps(s) Id r( A )
Modèle de la
MADA
Alimentation du stator Alimentation du rotor 𝜙𝑑𝑠 𝜙𝑞𝑠 𝑖𝑑𝑟 𝑖𝑞𝑟 𝐶𝑒𝑚 Ω39 Figure II.23 : Réponses de la machine en mode simple alimentation.
En régime établi, le courant prend sa valeur nominale, le couple électromagnétique tend vers la valeur qui compense les frottements. Tandis que la vitesse de rotation se stabilise à sa valeur nominale qui est égale à 157 rad/s.
Mode double alimentation : Dans ce cas le rotor est alimenté avec une source de tension à
amplitude et fréquence variable.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 flux statorique temps(s) fl u x (q s )( w b ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 flux statorique temps(s) fl u x (d s )( w b ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 20 40 60 80 100 120 140 160 180 vitesse de rotation temps(s) ? (r a d /s 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -20 -15 -10 -5 0 5 10 15 couple temps(s) C e m (N m ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -50 -40 -30 -20 -10 0 10 20 (courant rotorique ) temps (s) id r( w b ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -30 -20 -10 0 10 20 30 40 courant rotorique temps(s) Iq r( A )