TH`
ESE
pour l’obtention du Grade de
Docteur de l’Universit´
e de Poitiers
(Facult´e des Sciences Fondamentales et Appliqu´ees)
(Diplˆome National - Arrˆet´e du 7 aoˆut 2006)
´
Ecole Doctorale ED 521 : Sciences et ing´enierie pour l’information
Discipline : ´Electronique, photonique
Secteur de Recherche : Opto´electronique, micro-ondes
Pr´
esent´
ee par :
Ghadir MADI
Optimisation d’un r´
eseau de capteurs par techniques
MIMO coop´
eratives. Applications possibles : Smart
Grid, t´
el´
ed´
etection, ...
Directeur de Th`
ese
:Rodolphe VAUZELLE
Co-directeur de Th`
ese
:Yannis POUSSET
Co-directeur de Th`
ese
:Baptiste VRIGNEAU
Soutenue le 23/03/2012 devant la Commission d’Examen compos´ee de :
Jean-Pierre Canc`es, Professeur, Universit´e de Limoges . . . Pr´esident du Jury Gilles Burel, Professeur, Universit´e de Brest . . . Rapporteur Jean-Franc¸ois Diouris, Professeur, ´Ecole polytechnique de l’Universit´e de Nantes . . . Rapporteur Charlotte Langlais, Maˆıtre de Conf´erences, T´el´ecom Bretagne . . . Examinateur Basile L. Agba, Chercheur, Institut de recherche d’Hydro-Qu´ebec (IREQ) . . . Examinateur Rodolphe Vauzelle, Professeur, Universit´e de Poitiers . . . .Examinateur Yannis Pousset, Maˆıtre de Conf´erences, Universit´e de Poitiers . . . Examinateur Baptiste Vrigneau, Maˆıtre de Conf´erences, Universit´e de Poitiers . . . Examinateur
Remerciments
Je d´esire tout d’abord remercier Nour ma femme et Sami mon fils, qui m’ont apport´e leur soutien et qui m’ont support´e avec tous mes d´efauts durant ces ann´ees de travail. Sans eux, il fait nul doute que cette th`ese n’aurait jamais pu se concr´etiser aujourd’hui. Je ne pourrais pas ne pas remercier mon p`ere et ma m`ere, qui vivent tranquillement dans leur village en Syrie et qui attendent mon retour avec impatience. Je remercie sinc`erement mon Universit´e d’origine, Universit´e Tichrine `a Lattaqui´e en Syrie, pour avoir financ´e mes travaux de recherches ainsi que le s´ejour de ma petite famille en France durant cette th`ese.
Je souhaite ensuite exprimer ma plus profonde reconnaissance `a Monsieur Rodolphe Vauzelle, Professeur `a l’Universit´e de Poitiers, ainsi que Messieurs Baptiste Vrigneau et Yannis Pousset, Maˆıtres de Conf´erences `a l’Universit´e de Poitiers, pour la qualit´e de leur encadrement, mais aussi et avant tout pour la confiance qu’ils m’ont t´emoign´e durant ces trois ann´ees et demie de collaboration. J’esp`ere qu’ils garderont comme moi un excellent souvenir de cette exp´erience commune et que nous aurons de nouveau l’opportunit´e de travailler ensemble dans le futur.
Je suis ´egalement tr`es reconnaissant `a l’ensemble des membres du jury. Tout d’abord, Je remercie vivement Monsieur Gilles Burel, Professeur `a l’Universit´e de Brest, et Mon-sieur Jean-Fran¸cois Diouris, Professeur `a l’´Ecole polytechnique de l’Universit´e de Nantes, d’avoir accept´e de rapporter ce m´emoire. Je tiens `a remercier Monsieur Jean-Pierre Canc`es, Professeur `a l’Universit´e de Limoges, d’avoir assur´e la pr´esidence du jury.
Je remercie ´egalement Madame Charlotte Langlais, Maˆıtre de Conf´erences `a T´el´ecom Bretagne, et Monsieur Basile L. Agba, Chercheur `a l’institut de recherche d’Hydro-Qu´ebec, pour avoir accept´e de faire partie de mon jury en tant qu’examinateurs.
Mes travaux de th`ese ont ´et´e effectu´es au sein du D´epartement SIC du Laboratoire XLIM, c’est pourquoi j’exprime ma sinc`ere gratitude et mes plus profonds respects `a l’ensemble du personnel du D´epartement pour l’accueil et le soutien qu’ils m’ont t´emoign´e, autant d’´el´ements indispensables `a la r´ealisation de cette th`ese.
Enfin, un grand merci `a tous ceux que j’ai cˆotoy´e durant cette th`ese, coll`egues et amis syriens et fran¸cais, que je ne citerai pas ici par peur d’en oublier mais qui se reconnaˆıtront sˆurement.
Table des mati`
eres
Liste des acronymes et abr´eviations vii
Notations ix
Introduction 1
1 Les communications num´eriques et les syst`emes MIMO 7
1.1 Introduction . . . 8
1.2 Chaˆıne de communication num´erique . . . 8
1.3 Le canal d’un syst`eme mono-antennaire (SISO) . . . 10
1.3.1 Le bruit radio-´electrique . . . 10
1.3.2 Propri´et´es des canaux radio mobiles . . . 11
1.3.3 Mod´elisation du canal de transmission radio . . . 15
1.4 Notion de diversit´e . . . 19
1.5 Introduction aux syst`emes multi-antennaires . . . 20
1.5.1 Pr´esentation des syst`emes MIMO . . . 20
1.5.2 Mod`ele du canal MIMO . . . 21
1.5.3 R´ecepteur consid´er´e . . . 22
1.6 Les r´eseaux de capteurs . . . 23
1.6.1 Pr´esentation g´en´erale . . . 23
1.6.2 Contraintes . . . 24
1.6.3 Le MIMO et les r´eseaux de capteurs . . . 25
1.7 Conclusion . . . 26
2 Les techniques MIMO 29 2.1 Introduction . . . 30
2.2 Les syst`emes MIMO `a boucle ouverte . . . 30
2.2.1 Le code d’Alamouti . . . 30
2.2.2 G´en´eralisation des codes . . . 32
2.3 Les syst`emes MIMO `a boucle ferm´ee . . . 34
2.3.1 Les pr´ecodeurs lin´eaires . . . 34
2.3.2 Le pr´ecodage OSM . . . 43
2.4 Performances des pr´ecodeurs consid´er´es dans la th`ese . . . 45
TABLE DES MATI`ERES
2.4.2 Canal r´ealiste . . . 50
2.5 Conclusion . . . 54
3 La quantification des pr´ecodeurs max-dmin et P-OSM 55 3.1 Introduction . . . 56
3.2 Le canal de retour . . . 57
3.2.1 Principe g´en´eral . . . 57
3.2.2 Le canal de retour dans les normes . . . 59
3.3 La quantification du pr´ecodeur max-dmin. . . 60
3.3.1 Les informations `a quantifier . . . 60
3.3.2 Construction du dictionnaire pour la matrice Fv . . . 60
3.3.3 Choix de la matrice Fv . . . 62
3.3.4 Quantification de Fv et de γ . . . 62
3.3.5 Quantification des matrices Fv et Fd. . . 67
3.4 La quantification du pr´ecodeur P-OSM . . . 70
3.4.1 Les informations `a quantifier . . . 70
3.4.2 R´esultats de TEB . . . 71
3.5 max-dmin vs P-OSM . . . 73
3.5.1 R´esultats de TEB . . . 73
3.5.2 Discussion sur les difficult´es de calculs des pr´ecodeurs . . . 76
3.6 Conclusion . . . 78
4 Pr´ecodeurs coop´eratifs max-dmin et P-OSM pour les r´eseaux de capteurs 79 4.1 Introduction . . . 80
4.2 Mod`ele de consommation d’´energie dans les r´eseaux de capteurs . . . 81
4.2.1 Principe du mod`ele . . . 81
4.2.2 Analyse du mod`ele et avantages des pr´ecodeurs . . . 84
4.3 Mise en œuvre des pr´ecodeurs . . . 87
4.3.1 Le pr´ecodeur max-dmin . . . 87
4.3.2 Le pr´ecodeur P-OSM . . . 89
4.3.3 D´elai de transmission . . . 91
4.4 Etude des performances des syst`´ emes coop´eratifs propos´es . . . 92
4.4.1 Etude des configurations du syst`´ eme P-OSM coop´eratif . . . 93
4.4.2 R´epartition de la consommation d’´energie Epa et Ec . . . 94
4.4.3 Syst`eme coop´eratif OSTBC vs syst`eme SISO . . . 95
4.4.4 Comparaisons des syst`emes coop´eratifs max-dmin, P-OSM et OSTBC 97 4.5 L’effet de l’erreur de synchronisation . . . 101
4.5.1 Mod`ele de syst`eme avec une erreur de synchronisation . . . 102
4.5.2 Performances des syst`emes coop´eratifs . . . 104
4.6 Bilan et conclusion . . . 108
TABLE DES MATI`ERES
5 R´eseaux de capteurs : application aux postes ´electriques haute-tension111
5.1 Introduction . . . 112 5.2 Le bruit impulsionnel dans les postes HT . . . 113 5.2.1 Les lignes de transport : bruit couronne et Gap . . . 113 5.2.2 D´echarges partielles : transformateurs et isolateurs de traverse . . . 114 5.2.3 Mesures de bruit impulsionnel . . . 114 5.3 Mod´elisation statistique du bruit impulsionnel . . . 115 5.3.1 Mod`ele de Middleton Classe A . . . 115 5.3.2 Identification du mod`ele par confrontation simulations-mesures . . . 118 5.3.3 Extension du mod`ele de Middleton classe A pour les syst`emes
multi-antennaires . . . 121 5.4 Performances des pr´ecodeurs en pr´esence de bruit impulsionnel . . . 122 5.4.1 Contexte de simulation . . . 123 5.4.2 R´ecepteur MV avec l’hypoth`ese de bruit gaussien (MV-BG) . . . . 123 5.4.3 R´ecepteur MV avec l’hypoth`ese de bruit impulsionnel (MV-BI) . . 125 5.5 Premi`ere simulation r´ealiste d’un r´eseau de capteurs dans un poste HT . . 127 5.5.1 Environnement ´etudi´e . . . 127 5.5.2 D´efinition des configurations ´etudi´ees . . . 128 5.5.3 Evaluation de la consommation d’´´ energie des syst`emes coop´eratifs . 129 5.6 Conclusion . . . 132 Conclusion et perspectives 135 Bibliographie 141 Bibliographie personnelle 153 R´esum´e 155 Abstract 157
Liste des acronymes et abr´
eviations
3GPP 3rd Generation Partnership Project
3GPP2 3rd Generation Partnership Project 2
AWGN Additive white Gaussian noise
BBAG Bruit Blanc Additif Gaussien
BLAST Bell Labs Layered Space-Time
BPSK Binary phase-shift keying
CAN Convertisseur Analogique-Num´erique
CDMA Code Division Multiple Access
CNA Convertisseur Num´erique-Analogique
CSI Channel State Information
CCDF Complementary Cumulative Distribution Function
DDP Densit´e de Probabilit´e
DGN Data Gathering Node
DSL Digital Subscriber Line
EE Erreur Egale
EQMM Erreur Quadratique Moyenne Minimale
GSM Global System for Mobile communications
HT Haute tension
IES Interf´erence Entre Symboles
iid ind´ependant et identiquement distribu´e
ISM Industrial, Scientific and Medical
LOS Line Of Sight
LTE Long Term Evolution
MAQ Modulation d’Amplitude en Quadrature
MDA Modulation `a D´eplacement d’Amplitude
MDF Modulation `a D´eplacement de Fr´equence
MDP Modulation `a D´eplacement de Phase
MIMO Multiple-Input Multiple-Output
MV Maximum de Vraisemblance
NLOS Non Line Of Sight
OFDM Orthogonal frequency-division multiplexing
OG Optique G´eom´etrique
Liste des acronymes et abr´eviations
OSTBC Orthogonal Space-Time Block Code
PAPR Peak-to-Average power Ratio
QdS Qualit´e de Service
QSTBC Quasi-orthogonal Space-Time Block Code
RI R´eponse Impulsionnelle
RF Radio-Frequency
RSB Rapport Signal sur Bruit
SISO Single-Input Single-Output
STBC Space-Time Block Code
STTC Space Time Trellis Code
SVD Singular Value Decomposition
TD-SCDMA Time Division Synchronous Code Division Multiple Access
TEB Taux d’Erreur Binaire
TEBM Taux d’Erreur Binaire Minimal
TUD Th´eorie Uniforme de la Diffraction
UMTS Universal Mobile Telecommunications System
WF Water-Filling
Wi-Fi Wireless Fidelity
WiMAX Worldwide Interoperability for Microwave Access
WMAN Wireless Metropolitan Area Network
ZF Zero-Forcing
Notations
nt nombre d’antennes `a l’´emission nr nombre d’antennes `a la r´eception
s vecteurs de symboles
H matrice de canal
F matrice de pr´ecodage
G matrice de d´ecodage b nombre de flux de donn´ees
Hv matrice de canal virtuel
dmin distance minimale de la constellation de r´eception γ angle du canal virtuel
ρ gain du canal virtuel
β exposant d’att´enuation du canal E[.] esp´erance math´ematique
.∗ transpos´e conjugu´e d’une matrice ∣∣.∣∣F norme de Frobenius
In matrice identit´e de taille n
diag(.) matrice d´efinie par sa diagonale principale
P0 puissance moyenne totale ´emise sur les nt antennes σ2
n variance du bruit
C ensemble des symboles complexes de la constellation M nombre d’´etats dans la constellation
R rendement d’un code MIMO
R[.] partie r´eelle I[.] partie imaginaire
Fv dictionnaire de N matrices unitaires
NF b nombre de bits dans le canal de retour Epa ´energie de transmission
Ec ´energie de circuits
Eb/N0 rapport ´energie par bit sur le bruit Rb d´ebit binaire
Table des figures
1.1 Sch´ema d’une chaˆıne de communication num´erique . . . 8
1.2 Principe de la modulation en quadrature : les impacts sont r´epartis dans le plan complexe . . . 10
1.3 Variations de la puissance re¸cue dans un canal radio mobile . . . 12
1.4 Ph´enom`ene de multi-trajets lors de la propagation de l’onde dans un envi-ronnement ext´erieur . . . 13
1.5 Synoptique du simulateur de canal `a trac´e de rayons 3D . . . 18
1.6 Pr´esentation du simulateur : description de l’environnement, calculs des multi-trajets et position ´emetteur/r´ecepteur . . . 18
1.7 Sch´ema d’un sysy`eme MIMO `a bande ´etroite . . . 21
1.8 Capteur sans fil . . . 23
1.9 Exemple de r´eseau de capteurs . . . 24
1.10 MIMO coop´eratif dans les r´eseaux de capteurs : sc´enario 1 . . . 25
1.11 MIMO coop´eratif dans les r´eseaux de capteurs : sc´enario 2 . . . 26
2.1 Transmission MIMO utilisant des OSTBC . . . 33
2.2 Sch´ema bloc des pr´ecodeurs lin´eaires dans le canal virtuel . . . 35
2.3 Sch´ema bloc des pr´ecodeurs diagonaux . . . 37
2.4 Sch´ema bloc des pr´ecodeurs non-diagonaux . . . 38
2.5 Sch´ema bloc de pr´ecodeur E-dmin . . . 41
2.6 Sch´ema bloc du pr´ecodeur P-OSM . . . 45
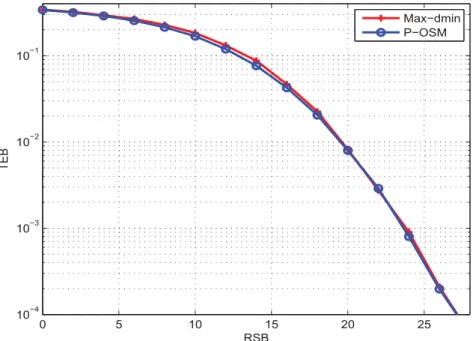
2.7 Comparaison des TEB des pr´ecodeurs max-dmin et P-OSM (MAQ-4) et du code d’Alamouti (MAQ-16) pour un syst`eme MIMO 2× 2, (4 bits/s/Hz) . 47 2.8 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour un syst`eme MIMO 2× 2 et une MAQ-16 (8 bits/s/Hz) . . . 47
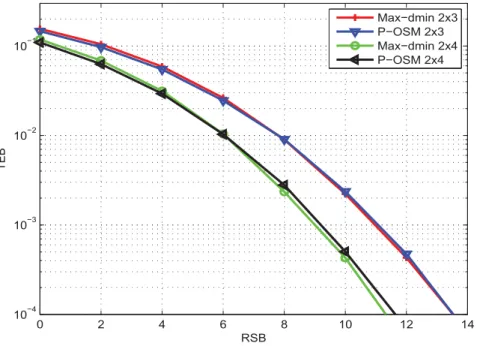
2.9 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour les syst`emes MIMO 2× 3 et 2 × 4 et une MAQ-4 (4 bits/s/Hz) . . . 48
2.10 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour un syst`eme MIMO 4× 2 et une MAQ-4 (4 bits/s/Hz) . . . 49
2.11 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour un syst`eme MIMO 4× 4 et une MAQ-4 (4 bits/s/Hz) . . . 49
TABLE DES FIGURES
2.13 ´Evolution des coefficients de la matrice de canal pour une vitesse ´egale `a 5 km/h . . . 51 2.14 ´Evolution des coefficients de la matrice de canal pour une vitesse ´egale `a
50 km/h . . . 52 2.15 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour un syst`eme
MIMO 2× 2 et une MAQ-4, mod`ele r´ealiste avec une estimation parfaite . 53 2.16 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM pour un syst`eme
MIMO 2× 2 et une MAQ-4, mod`ele r´ealiste avec une estimation imparfaite 53 3.1 Principe g´en´eral de la quantification de l’information de retour . . . 58 3.2 TEB du pr´ecodeur max-dmin : Fv compl`ete avec une quantification de γ,
un syst`eme MIMO 2× 2 et une MAQ-4 . . . 63 3.3 TEB du pr´ecodeur max-dmin avec la quantification de Fv et de γ : n1 = 2,
3 et 5 bits et n2= 2 bits, un syst`eme MIMO 2 × 2 et une MAQ-4 . . . 64 3.4 TEB du pr´ecodeur max-dmin avec la quantification de Fv et de γ : n1 = 3
et 5 bits et n2 = 2 bits, un syst`eme MIMO 2 × 4 et une MAQ-4 . . . 65 3.5 TEB du pr´ecodeur max-dmin avec la quantification de Fv et de γ : n1 = 3,
5 et 7 bits et n2= 2 bits, un syst`eme MIMO 3 × 3 et une MAQ-4 . . . 66 3.6 TEB du pr´ecodeur max-dmin avec la quantification de Fv et de γ : n1 = 5
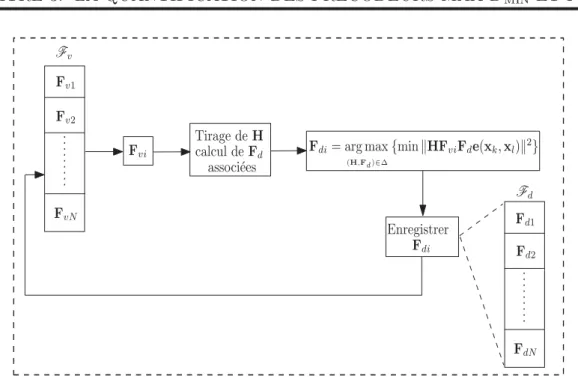
et 7 bits et n2 = 2 bits, un syst`eme MIMO 4 × 4 et une MAQ-4 . . . 66 3.7 Algorithme de calcul propos´e pour construire un dictionnaire pour la
ma-trice Fd . . . 68 3.8 TEB du pr´ecodeur max-dminavec la quantification de Fv et de γ (NF b= 3+2
bits) et la quantification de F= FvFd(NF b= n1= 3 bits), un syst`eme MIMO 2× 4 et une MAQ-4 . . . 69 3.9 TEB du pr´ecodeur max-dminavec la quantification de Fv et de γ (NF b= 5+2
et 7+ 2 bits) et la quantification de F = FvFd (NF b = n1 = 5 et 7 bits), un syst`eme MIMO 3× 3 et une MAQ-4 . . . 69 3.10 TEB du pr´ecodeur max-dminavec la quantification de Fv et de γ (NF b= 7+2
bits) et la quantification de F= FvFd(NF b= n1= 7 bits), un syst`eme MIMO 4× 4 et une MAQ-4 . . . 70 3.11 TEB du pr´ecodeur P-OSM avec la quantification : nθ = 2 bits et nθ1 = 1,
2, 3 et 4 bits, un syst`eme MIMO 4× 4 et une MAQ-4 . . . 71 3.12 TEB du pr´ecodeur P-OSM avec la quantification : nθ = 3 bits et nθ1 = 1 et
2 bits, un syst`eme MIMO 4× 4 et une MAQ-4 . . . 72 3.13 TEB du pr´ecodeur P-OSM avec la quantification pour plusieurs
configura-tions de nθ et nθ1, un syst`eme MIMO 4× 4 et une MAQ-4 . . . 73 3.14 Comparaison des TEB des max-dmin et P-OSM avec la quantification pour
NF b= 3 bits, un syst`eme MIMO 2 × 4 et une MAQ-4 . . . 74 3.15 Comparaison des TEB des max-dmin et P-OSM avec la quantification pour
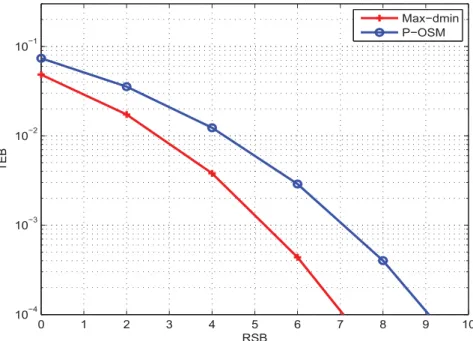
pour NF b = 7 bits, un syst`eme MIMO 4 × 4 et une MAQ-4 . . . 75 3.16 Comparaison des TEB des max-dmin et P-OSM avec la quantification pour
NF b= 10 bits, un syst`eme MIMO 4 × 4 et une MAQ-4, . . . 76
TABLE DES FIGURES
4.1 Un exemple type de MIMO coop´eratif dans les r´eseaux de capteurs . . . . 81 4.2 Chaˆınes classique d’´emission et de r´eception RF . . . 82 4.3 Comparaison des TEB des pr´ecodeurs max-dminet P-OSM et codes OSTBC
pour une CSI compl`ete et quantifi´ee avec 7 bits de retour . . . 86 4.4 Principe du MIMO coop´eratif avec pr´ecodage . . . 87 4.5 Pr´ecodeur POSM coop´eratif avec nt> 2 . . . 89 4.6 Consommation totale d’´energie pour les trois configurations coop´eratives
du P-OSM . . . 93 4.7 R´epartition des ´energies Epa et Ec pour un syst`eme SISO . . . 94 4.8 Energie E´ c dans les syst`emes MIMO coop´eratifs et SISO . . . 95 4.9 Consommation totale d’´energie des syst`emes MIMO OSTBC coop´eratif et
SISO . . . 96 4.10 Consommation totale d’´energie des MIMO coop´eratifs max-dmin, P-OSM
et OSTBC . . . 97 4.11 Consommation totale d’´energie des syst`emes MIMO coop´eratifs
P-OSM (NF b = 7 et 10 bits) et OSTBC . . . 98 4.12 Consommation totale d’´energie des syst`emes MIMO coop´eratifs max-dmin,
P-OSM et OSTBC, 2× 4, NF b = 3 bits pour max-dmin et 6 bits pour P-OSM 99 4.13 Consommation totale d’´energie des syst`emes MIMO coop´eratifs max-dmin,
P-OSM et OSTBC, 4× 4, F = 100 et p = 3 symboles . . . 101 4.14 max-dmin coop´eratif avec IES : exemple pour 2 nœuds . . . 103 4.15 TEB des pr´ecodeurs max-dmin et P-OSM en pr´esence d’erreur de
synchro-nisation pour un syst`eme MIMO 4× 4 avec NF b= 7 bits . . . 104 4.16 TEB des pr´ecodeurs max-dmin, P-OSM et codes OSTBC en pr´esence
d’er-reur de synchronisation pour un syst`eme MIMO 4× 4 avec NF b = 7 bits : Tsyn= 0, 2Ts et 0, 3Ts . . . 105 4.17 TEB des pr´ecodeurs max-dmin, P-OSM et codes OSTBC en pr´esence
d’er-reur de synchronisation pour un syst`eme MIMO 4× 4 avec NF b = 7 bits : Tsyn= 0, 4Ts et 0, 5Ts . . . 106 4.18 Consommation totale d’´energie des syst`emes coop´eratifs pour Tsyn= 0, 2Ts 107 4.19 Consommation totale d’´energie des syst`emes coop´eratifs pour Tsyn= 0, 3Ts 107 4.20 Consommation totale d’´energie pour les trois configurations coop´eratives
de P-OSM en pr´esence d’erreur de synchronisation : Tsyn= 0, 3Ts . . . 108 5.1 D´echarges partielles internes et externes . . . 114 5.2 La densit´e de probabilit´e de Middleton Classe A pour (A= 0, 1 et 10, Γ = 0, 8)117 5.3 Proc´edure de validation du mod`ele de Middleton Classe A . . . 118 5.4 Densit´e de probabilit´e pour le Bruit mesur´e-1, le bruit g´en´er´e Middleton-1
et le bruit gaussien . . . 119 5.5 Densit´e de probabilit´e pour le Bruit mesur´e-2, le bruit g´en´er´e Middleton-2
TABLE DES FIGURES
5.6 TEB des pr´ecodeurs max-dmin et P-OSM en pr´esence de bruits impulsion-nels estim´es Middleton-1 et 2 avec le r´ecepteur MV-BG, syst`emes MIMO 2× 2 et 2 × 4 . . . 124 5.7 TEB des pr´ecodeurs max-dmin et P-OSM en pr´esence de bruit impulsionnel
estim´e Middleton-1 avec le r´ecepteur MV-BG, syst`eme MIMO 4× 4 . . . . 125 5.8 TEB des pr´ecodeurs max-dmin et P-OSM en pr´esence de bruit impulsionnel
estim´e Middleton-1 avec le r´ecepteur MV-BI, syst`eme MIMO 4× 4 . . . 126 5.9 Poste HT des Laurentides vue a´erienne avec Google Earth . . . 127 5.10 Poste HT des Laurentides mod´elis´e avec le simulateur . . . 128 5.11 Comparaison de la consommation d’´energie des syst`emes coop´eratifs pour
les bruits Middleton-1 et gaussien : hauteur = 1,5 m . . . 129 5.12 Comparaison de la consommation d’´energie des syst`emes coop´eratifs pour
les bruits Middleton-1 et gaussien : hauteur = 6 m . . . 130 5.13 Comparaison de la consommation d’´energie des syst`emes coop´eratifs entre
les hauteurs 1,5 et 6 m pour le bruit Middleton-1 . . . 131 5.14 Consommation d’´energie des syst`emes coop´eratifs : comparaison des r´ecepteurs
MV-BI et MV-BG avec le bruit Middleton-1, hauteur = 1,5 m . . . 132 5.15 Exemple d’un r´eseau de capteurs avec plusieurs syst`emes MIMO coop´eratifs 139
Liste des tableaux
4.1 Valeurs du PAR calcul´ees num´eriquement pour les pr´ecodeurs pour une
MAQ-4 . . . 86
4.2 Param`etres de mod`ele d’´energie . . . 92
4.3 D´elais pour les trois configurations coop´eratives du P-OSM . . . 93
4.4 D´elais des syst`emes SISO et MIMO OSTBC coop´eratif . . . 96
4.5 D´elais des syst`emes MIMO coop´eratifs max-dmin, P-OSM et OSTBC . . . 97
4.6 Les pertes de Eb/N0`a cause de l’erreur de synchronisation (x : le TEB cible ne peut pas ˆetre assur´e) . . . 105
Introduction
De nos jours, les r´eseaux de t´el´ecommunications sans fil sont pr´esents dans de tr`es nombreux domaines. Les avanc´ees technologiques et techniques op´er´ees dans le domaine des r´eseaux sans fil, de la micro-fabrication et de l’int´egration des microprocesseurs ont fait naˆıtre une nouvelle g´en´eration de r´eseaux de capteurs `a grande ´echelle adapt´es `a une gamme d’applications tr`es vari´ee. Imaginons un ensemble de petits appareils ´electroniques, autonomes, ´equip´es de capteurs et capables de communiquer entre eux sans fil. Ensemble, ils forment un r´eseau de capteurs capable de fournir `a distance des informations utiles par la combinaison des mesures prises par les diff´erents capteurs et de les communiquer ensuite via les canaux radio´electriques.
Cette nouvelle technologie promet de r´evolutionner notre fa¸con de vivre, de travailler et d’interagir avec l’environnement physique qui nous entoure. Aujourd’hui, des capteurs bon march´e peuvent ˆetre litt´eralement ´eparpill´es sur des routes, des structures, des murs, des machines, etc. Les r´eseaux de capteurs peuvent ˆetre compos´es, suivant leur utilisation, de diff´erents types de nœuds ou capteurs, tels que les capteurs sismiques, thermiques, vi-suels, infrarouges, acoustiques et radar, cr´eant ainsi une sorte de r´eseau qui permet la t´el´ed´etection d’une grande vari´et´e de ph´enom`enes physiques.
De nombreux domaines d’applications sont alors envisag´es tels que la t´el´ed´etection et la t´el´esurveillance des d´esastres et de l’environnement, la surveillance et la t´el´emaintenance pr´eventive des machines, le domaine militaire, la m´edecine et la sant´e, les transports in-telligents, ... Des exemples d’applications potentielles dans les domaines o`u ces r´eseaux peuvent offrir de r´eelles contributions, sont expos´es ci-dessous.
- Applications environnementales : Dans ce domaine nous pouvons mentionner
des applications typiques comme [1] : (i) la dispersion de thermo-capteurs `a partir d’un avion sur une forˆet pour signaler un ´eventuel d´ebut d’incendie, (ii) le d´eploiement de cap-teurs sur les sites industriels comme dans les raffineries de p´etrole pour d´etecter des fuites de produits toxiques (gaz, produits chimiques, p´etrole, etc.). Il s’agit d’alerter les util-isateurs dans un d´elai suffisamment court pour permettre une intervention efficace, (iii) dans l’agriculture, ces r´eseaux sont capables d’apporter des b´en´efices consid´erables, grˆace `
a leur habilit´e de surveiller les taux de pesticides dans l’eau potable, le degr´e d’´erosion du sol, le niveau de pollution de l’air en temps r´eel, ...
Introduction
- Applications militaires : Comme beaucoup d’autres technologies de
l’informa-tion, les r´eseaux de capteurs sans fil proviennent principalement de la recherche militaire. Un exemple typique d’application est le d´eploiement d’un tel r´eseau dans un endroit strat´egique ou difficile d’acc`es [2], afin de t´el´esurveiller toutes les activit´es des forces enne-mies ou d’analyser le terrain avant d’y envoyer des troupes, par la t´el´ed´etection d’agents chimiques, biologiques ou de radiations, par exemple.
- Applications li´ees `a la s´ecurit´e : Comme exemples d’applications de ce type nous
pouvons citer [3], [4] : (i) la t´el´ed´etection des alt´erations dans la structure d’un bˆatiment, d’une route, d’un quai, d’une voie ferr´ee, d’un pont ou d’un barrage hydro´electrique suite `
a un s´eisme ou au vieillissement, par des capteurs pr´ealablement int´egr´es dans les murs ou dans le b´eton, (ii) la d´etection des inondations par un syst`eme d’alerte. Ce dernier peut contenir plusieurs types de capteurs hydrologiques qui d´etectent la pluie, le niveau d’eau, ainsi que d’autres capteurs m´et´eorologiques qui servent `a la d´etection de la temp´erature, la pression, etc. Tous ces types de capteurs fournissent les informations n´ecessaires `a une base de donn´ees centralis´ee via des communications radio ; un mod`ele de pr´evision des inondations est adopt´e pour analyser les donn´ees re¸cues et g´en´erer les avertissements ´
eventuels.
- Applications industrielles : Parmi ces applications nous citons un exemples
typ-ique : le “Smart Grid” [5]. C’est une des d´enominations d’un r´eseau de distribution d’´electricit´e intelligent qui utilise la technologie des r´eseaux de capteurs.
Le r´eseau ´electrique est constitu´e de plusieurs postes ´electriques haute-tension (HT) qui peuvent avoir une multitude de fonctions visant `a s´ecuriser et contrˆoler le transport de l’´energie. Dans ce contexte, certains fournisseurs d’´electricit´e comme Hydro-Qu´ebec au Canada [6], souhaite pouvoir contrˆoler et surveiller ce r´eseau `a distance en mettant en place des capteurs sans fil. Diff´erents types d’applications pourront ˆetre mis en œuvre pour le contrˆole et la maintenance [6] :
– Des applications de t´el´eprotection et d’automatismes de contrˆole du r´eseau ´electrique qui permettent de maintenir la stabilit´e.
– Des applications de t´el´econduite pour l’exploitation de ce r´eseau.
– Des applications de t´el´emaintenance qui serviront `a l’analyse du comportement du r´eseau et de ses automatismes, ainsi que pour la configuration et l’entretien des ´
equipements du poste.
Dans la majorit´e de ces applications, les circuits ´emetteurs/r´ecepteurs des capteurs doivent ˆetre capables de fonctionner durant une longue p´eriode en ´etant aliment´es sur simple pile. Recharger les batteries dans un r´eseau de capteurs est parfois impossible en raison de l’emplacement des capteurs, mais le plus souvent pour la simple raison que cette op´eration est pratiquement ou ´economiquement infaisable. Il est donc largement reconnu que la r´eduction d’´energie consomm´ee est une question incontournable dans la conception des r´eseaux de capteurs en raison des contraintes strictes qu’elle impose sur l’exploitation
Introduction
du r´eseau. Dans les r´eseaux de capteurs, la consommation d’´energie est constitu´ee de deux sources principales : l’´energie de transmission qui d´epend de la distance de transmission, l’att´enuation du canal, les caract´eristiques d’antennes et l’´energie consomm´ee dans les circuits tel que les blocs RF et les processeurs.
Par ailleurs, les syst`emes multi-antennaires MIMO (Multiple-input Multiple-output) ont ´et´e largement ´etudi´es au cours des derni`eres ann´ees en raison de leur potentiel `a aug-menter consid´erablement les performances des syst`emes de transmissions sans fil dans des canaux `a ´evanouissements en termes de robustesse, de d´ebits et de qualit´e de service. Le potentiel des syst`emes MIMO peut aussi ˆetre utilis´e pour r´eduire l’´energie de transmission dans les r´eseaux de capteurs. Toutefois, l’application directe de la technique MIMO `a de tels r´eseaux n’est pas possible `a cause de la taille limit´ee des capteurs. Cependant, les capteurs peuvent coop´erer pour correspondre `a une entit´e multi-antennaire et r´ealiser une transmission MIMO. Cette technique de coop´eration est appel´ee MIMO coop´eratif. Ce dernier a r´ecemment montr´e son efficacit´e en terme de consommation d’´energie en com-paraison avec le syst`eme mono-antennaire SISO (Single-Input Single-Output) classique-ment utilis´e dans les r´eseaux de capteurs. Cependant, ce syst`eme coop´eratif ´etait jusque-l`a bas´e sur un syst`eme MIMO `a boucle ouverte en utilisant les codes spatio-temporels en bloc orthogonaux (OSTBC).
L’enjeu de cette th`ese est d’´etudier l’application des nouvelles techniques MIMO `a boucle ferm´ee dans le contexte de MIMO coop´eratif pour les r´eseaux de capteurs afin de r´eduire la consommation l’´energie. Ces nouvelles techniques MIMO sont bas´ees sur les pr´ecodeurs max-dmin et P-OSM qui n´ecessitent la connaissance du canal `a l’´emission (Channel State Information ou CSI). Le terme de pr´ecodeur regroupe toute utilisation de la CSI pour am´eliorer conjointement l’´emetteur et le r´ecepteur d’un syst`eme de trans-mission en optimisant un crit`ere pertinent. Ces deux pr´ecodeurs maximisent la distance minimale de la constellation `a la r´eception (dmin) mais utilisent deux philosophies de pr´ecodage diff´erentes. La CSI `a l’´emission n´ecessite la mise en place d’un canal de retour d’information du r´ecepteur vers l’´emetteur en renvoyant toute l’estimation du canal (CSI compl`ete). Afin de rendre l’utilisation de la CSI r´ealiste dans les r´eseaux de capteurs, nous quantifions les pr´ecodeurs max-dminet P-OSM. L’objectif est de r´eduire au maximum l’in-formation envoy´ee dans le canal de retour tout en ayant des performances acceptables des pr´ecodeurs (CSI quantifi´ee).
Ce document est structur´e en cinq chapitres :
Le premier chapitre
Il introduit rapidement les notions de base pour la compr´ehension de ce m´emoire. Ainsi, une chaˆıne de communication num´erique d’un syst`eme mono-antennaire est d´ecrite. Elle est ensuite ´etendue aux syst`emes multi-antennaires MIMO avec la pr´esentation du mod`ele ´equivalent en bande de base et les r´ecepteurs couramment utilis´es. Le principe des r´eseaux de capteurs sera ´egalement pr´esent´e.
Introduction
Le deuxi`eme chapitre
Dans ce chapitre, nous pr´esenterons des techniques MIMO `a boucle ouverte et ferm´ee permettant d’exploiter les avantages du canal multi-antennaire. Ce chapitre d´ecrit les pr´ecodeurs max-dmin et P-OSM utilis´es dans nos travaux et pr´esente rapidement d’autres pr´ecodeurs pr´esents dans la litt´erature. Nous ´evaluerons les performances des pr´ecodeurs max-dmin et P-OSM en terme de taux d’erreur binaire (TEB) dans un canal de Rayleigh et ensuite dans un canal r´ealiste produit par un simulateur d´eterministe de propagation d’ondes.
Le troisi`eme chapitre
Il s’int´eresse `a la quantification des pr´ecodeurs max-dmin et P-OSM. Dans les situa-tions pratiques comme dans les r´eseaux de capteurs, la quantit´e d’information de retour (CSI) doit ˆetre aussi faible que possible afin de limiter la consommation d’´energie. L’ob-jectif consiste ainsi `a quantifier l’information de retour afin de limiter sa taille et `a avoir une bonne performance en fonction de la quantification ad´equate de la CSI disponible `
a l’´emission compar´ee au cas optimal (CSI compl`ete). Nous ´etudierons et d´eveloppons plusieurs strat´egies de quantification et d´eterminerons la meilleure en termes de TEB obtenu et de nombre de bits disponibles dans le canal de retour. Nous continuerons en-suite en analysant la complexit´e de ces pr´ecodeurs `a travers les ´etapes de transmission et de r´eception.
Le quatri`eme chapitre
La quantification effectu´ee dans le troisi`eme chapitre va nous permettre d’appliquer les pr´ecodeurs max-dmin et P-OSM dans le contexte de MIMO coop´eratif pour les r´eseaux de capteurs. L’objectif est d’exploiter au mieux le principe de coop´eration des capteurs afin de r´eduire la consommation l’´energie. Toutefois, l’application de ces pr´ecodeurs est plus compliqu´ee que les codes OSTBC `a cause des ´etapes suppl´ementaires n´ecessaires `a la CSI. Ainsi, notre contribution consiste `a proposer plusieurs sch´emas coop´eratifs qui permet-tent de mettre en place les deux pr´ecodeurs avec le canal de retour quantifi´e sur quelques bits. Les performances des syst`emes propos´es en termes de consommation d’´energie et de d´elai de transmission seront ´evalu´ees et analys´ees en prenant comme r´ef´erence le syst`eme MIMO coop´eratif `a codes spatio-temporels pr´esent dans la litt´erature. Dans le MIMO coop´eratif, les capteurs sont physiquement s´epar´es dans l’espace ce qui peut entrainer une d´esynchronisation de leurs horloges. Pour cela, nous ´etudierons d’abord les MIMO coop´eratifs propos´es en supposant une synchronisation parfaite entre les capteurs et en-suite en introduisant une erreur de synchronisation.
Le cinqui`eme chapitre
Nous nous int´eressons ici `a l’utilisation de r´eseaux de capteurs dans les postes ´electriques HT dans le contexte de “Smart Grid”. Ce travail a ´et´e men´e dans le cadre d’une
Introduction
ration scientifique entre le d´epartement SIC (Universit´e de Poitiers) du laboratoire XLIM et l’Institut de recherche d’Hydro-Qu´ebec (IREQ) `a Montr´eal. Le fournisseur d’´electricit´e Hydro-Qu´ebec tente de contrˆoler et de surveiller leurs r´eseaux ´electriques en utilisant le “Smart Grid”. Cependant, cet environnement est perturb´e par le bruit impulsionnel qui peut fortement d´egrader les performances et la fiabilit´e des syst`emes de communication sans fil. Dans ce chapitre, les syst`emes MIMO coop´eratifs propos´es seront ´evalu´es dans un environnement r´eel de poste ´electrique HT au Qu´ebec et en pr´esence de bruit impul-sionnel. Nous ´etudierons la mod´elisation du bruit impulsionnel dans les postes ´electriques HT. En utilisant une s´erie de mesures de ce bruit effectu´ee par l’´Ecole de Technologie Sup´erieure de Montr´eal ( ´ETS), nous d´eterminerons un mod`ele statistique du bruit impul-sionnel. Nous proposerons une extension du mod`ele de bruit en r´eception pour un syst`eme multi-antennaire. L’impact de ce bruit impulsionnel sur le TEB de syst`emes MIMO sera ensuite estim´e en utilisant deux r´ecepteurs du maximum de vraisemblance. Le premier est bas´e sur l’hypoth`ese de bruit gaussien et le deuxi`eme est bas´e sur l’hypoth`ese de bruit impulsionnel.
Chapitre 1
Les communications num´
eriques et
les syst`
emes MIMO
Sommaire
1.1 Introduction . . . . 8 1.2 Chaˆıne de communication num´erique . . . . 8 1.3 Le canal d’un syst`eme mono-antennaire (SISO) . . . . 10
1.3.1 Le bruit radio-´electrique . . . 10 1.3.2 Propri´et´es des canaux radio mobiles . . . 11 1.3.3 Mod´elisation du canal de transmission radio . . . 15
1.4 Notion de diversit´e . . . . 19 1.5 Introduction aux syst`emes multi-antennaires . . . . 20
1.5.1 Pr´esentation des syst`emes MIMO . . . 20 1.5.2 Mod`ele du canal MIMO . . . 21 1.5.3 R´ecepteur consid´er´e . . . 22
1.6 Les r´eseaux de capteurs . . . . 23
1.6.1 Pr´esentation g´en´erale . . . 23 1.6.2 Contraintes . . . 24 1.6.3 Le MIMO et les r´eseaux de capteurs . . . 25
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
1.1
Introduction
Notre ´etude met en avant les int´erˆets de syst`emes multi-antennaires ou multiple-input multiple-output (MIMO) dans un contexte des r´eseaux de capteurs. Ce m´emoire porte plus particuli`erement sur l’utilisation de pr´ecodeurs MIMO avec la connaissance du canal `
a l’´emission. Tous les domaines de l’´electronique sont sollicit´es tout au long de la trans-mission : hyperfr´equence, propagation, conversion num´erique-analogique et analogique-num´erique, traitement du signal. Vu le large spectre de connaissances, ce chapitre se lim-itera `a recadrer l’´etude avec notamment l’introduction aux syst`emes MIMO et `a pr´esenter des points n´ecessaires `a la bonne compr´ehension du m´emoire.
Dans un premier temps, nous allons ici d´ecrire le fonctionnement d’une chaˆıne de transmission num´erique, de la source d’information binaire au destinataire, par les ´etapes successives de codage, de transmission dans un canal physique et de d´ecodage. Les canaux de transmission vont alors ˆetre d´ecrits. Nous introduirons ensuite la notion de diversit´e et les syst`emes multi-antennaires (MIMO). Enfin, nous pr´esenterons le principe des r´eseaux de capteurs.
1.2
Chaˆıne de communication num´
erique
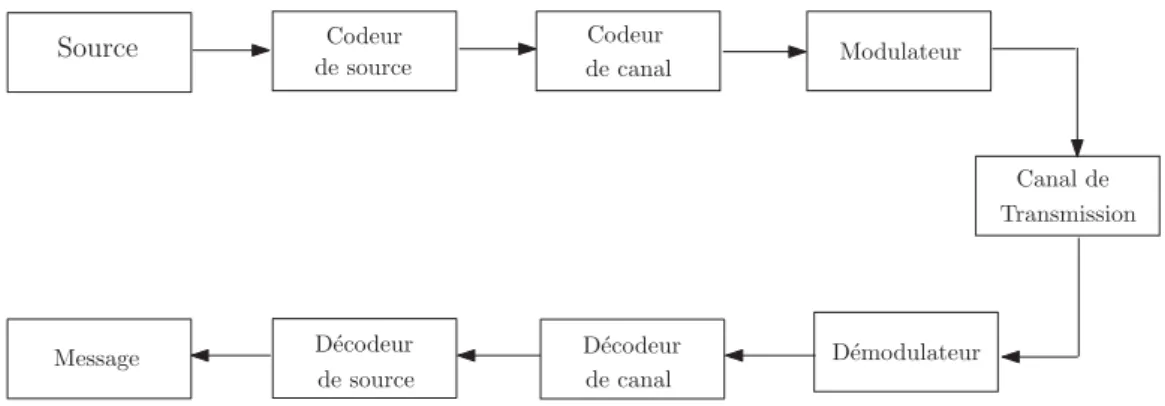
Les syst`emes de transmission num´erique v´ehiculent de l’information sous forme num´ e-rique entre une source et un ou plusieurs destinataires en utilisant un canal de transmis-sion. Les signaux transport´es peuvent ˆetre soit directement d’origine num´erique, comme dans les r´eseaux de donn´ees, soit d’origine analogique (parole, image...) mais convertis sous une forme num´erique. Ce paragraphe rappelle succinctement les bases des communi-cations num´eriques. Plus de d´etails sont disponibles dans [7] et [8]. Les diff´erents ´el´ements de base d’une chaˆıne de transmission sont rappel´es par la figure 1.1.
Source Codeur
de canal Modulateur
Canal de Transmission
D´ecodeur D´ecodeur D´emodulateur de canal
Codeur de source
de source Message
Figure 1.1 -Sch´ema d’une chaˆıne de communication num´erique
Si le message produit par la source est de type analogique, il est converti en une s´equence d’´el´ements binaires par des ´etapes successives d’´echantillonnage, de
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
tion et de codage binaire. Dans le cas id´eal, cette s´equence doit ˆetre la plus courte possible. Pour augmenter l’efficacit´e de la transmission et optimiser l’utilisation des ressources du syst`eme, un codeur de source compresse les donn´ees en ´eliminant les ´el´ements binaires non significatifs. Nous ne nous int´eresserons pas dans cette th`ese au codage de source, et consid´ererons que la source d’information est id´eale, i.e. d´elivre des ´el´ements binaires ind´ependants et identiquement distribu´es (iid ).
Lors du passage dans le canal de transmission, le signal est alt´er´e par du bruit et des interf´erences, induisant parfois le r´ecepteur en erreur. Afin d’augmenter la fiabilit´e de la transmission, un codeur de canal introduit, de mani`ere parfaitement contrˆol´ee, de la redondance dans la s´equence d’information. Ce codage est encore appel´e codage d´etecteur et correcteur d’erreurs puisque le r´ecepteur connaˆıt la loi de codage utilis´ee et est donc capable de d´etecter puis ´eventuellement corriger les donn´ees binaires erron´ees (codage de Hamming [9], entrelaceur, turbo codes [10]). `A la sortie du codeur de canal, la s´equence d’information binaire passe par un modulateur num´erique, qui sert d’interface avec le canal de transmission en donnant au signal une contenance physique.
`
A la r´eception, le d´emodulateur traite les formes d’onde en provenance du canal et les r´eduit `a des s´equences de nombres, qui repr´esentent des estimations des symboles ´emis. Ces s´equences sont ensuite d´ecod´ees selon les op´erations inverses de celles employ´ees `a l’´emission, ce qui permet au destinataire de retrouver l’information binaire initiale.
L’information binaire n’arrive pas toujours sans erreur au destinataire `a cause du bruit. La fr´equence `a laquelle les erreurs se produisent constitue une bonne indication de la fiabilit´e de la communication. Pour la quantifier, on d´efinit le Taux d’Erreur Binaire (TEB) comme le rapport entre le nombre de bits erron´es et le nombre total de bits ´emis.
La chaˆıne de transmission d´ecrite plus haut est ´etudi´ee grˆace `a un signal en bande de base car il n’y a pas de transposition du signal autour d’une fr´equence porteuse [11]. Ainsi, le signal modul´e est une suite de coefficients complexes issus du diagramme de constellation de la modulation.
Les modulations num´eriques
Il existe diff´erentes modulations permettant de transmettre des informations num´ e-riques. Citons en quelques unes : modulation `a d´eplacement d’amplitude (MDA), de phase (MDP) ou de fr´equence (MDF), et la modulation d’amplitude en quadrature (MAQ). Nous utiliserons principalement la MAQ dans les transmissions ´etudi´ees. Le d´esavantage de la MAQ est que la puissance instantan´ee fluctue selon le symbole ´emis. Nous ne consid´ererons comme contrainte que la puissance moyenne des symboles disponibles, celle-ci devant ˆetre unitaire : E[∣si∣2] = 1 M M ∑ i=1 ∣si∣2 = 1 si∈ C (1.1)
o`u E[.] est l’esp´erance math´ematique, M repr´esente le nombre de symboles de la constel-lation, si est un symbole etC est l’ensemble complexe des symboles disponibles. La figure
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
1.2 repr´esente les impacts de la modulation dans le plan complexe : les points forment des carr´es de cˆot´es 2√βM et sont ´equir´epartis sur le plan. Le terme βM est donn´e par :
βM = 3 2(M − 1) pour M = 2 n avec n= 2, 3, 4, .... (1.2) Partie r´eelle P artie imaginaire 2√βM
Figure 1.2 - Principe de la modulation en quadrature : les impacts sont r´epartis dans le plan complexe
1.3
Le canal d’un syst`
eme mono-antennaire (SISO)
Le canal de transmission est un support physique permettant de transmettre l’infor-mation entre un ´emetteur et un r´ecepteur. Dans le cas d’une communication sans fil, c’est l’onde ´electromagn´etique qui assure l’acheminement de l’information vers le r´ecepteur dans l’air. Dans cette section, nous consid´erons un canal SISO (Single Input-Single Out-put) soit une antenne en ´emission et une antenne en r´eception. Nous allons aborder les ph´enom`enes perturbants le signal ´emis ainsi que les mod`eles les plus souvent adopt´es pour caract´eriser un canal sans fil.
1.3.1
Le bruit radio-´
electrique
Le bruit [12] est l’´el´ement perturbateur majeur d’une communication num´erique. Rap-pelons que le but d’une chaˆıne de transmission est de transmettre une information pr´ecise
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
en utilisant un signal ayant travers´e un canal. Celui-ci peut subir diverses d´eformations et notamment des signaux qui se superposent au signal initial. Ainsi, le bruit se d´efinit comme tout signal ne contenant pas d’information utile pour retrouver le message d’orig-ine. Ce bruit poss`ede une puissance et permet d’introduire un param`etre de r´ef´erence : le rapport signal sur bruit (RSB) d´efini comme le rapport de la puissance du signal utile sur la puissance du bruit. Un des int´erˆets des communications num´eriques est de proposer une sensibilit´e au bruit inf´erieure `a celle des communications analogiques. Les sources de bruit sont multiples, en voici une liste non exhaustive :
– bruit interne des composants (bruit thermique dˆu `a l’activit´e des ´electrons dans les semi-conducteurs),
– le rayonnement cosmique,
– l’activit´e humaine comme l’´emission d’autres signaux, – ...
Le bruit est donc une valeur stochastique que ni l’´emetteur ni le r´ecepteur ne peuvent contrˆoler. Il est n´ecessaire d’attribuer un mod`ele statistique au bruit et celui classique-ment utilis´e est de consid´erer un bruit (not´e n) blanc additif gaussien (BBAG) de valeur moyenne nulle et de variance σ2
n.
1.3.2
Propri´
et´
es des canaux radio mobiles
Outre le bruit ajout´e lors de la transmission, le canal att´enue la puissance du signal ´emis. Les transmissions sur le canal mobile dans des environnements ext´erieurs (pr´esence de nombreux bˆatiments) ou int´erieurs (murs, meubles, etc.) g´en`erent beaucoup d’´echos que la mod´elisation du canal doit prendre en compte. La figure 1.3 est une bonne illustration pour repr´esenter les diff´erentes d´egradations de la puissance re¸cue dans un environnement radiomobile. On peut constater que la puissance re¸cue subit des att´enuations de diff´erentes natures li´ees aux sp´ecificit´es du milieu de propagation et `a la mobilit´e de l’´emetteur et du r´ecepteur dans l’environnement.
Les att´enuations d’un canal radio mobile se pr´esentent sous trois formes diff´erentes : – L’att´enuation `a grande ´echelle : elle repr´esente l’att´enuation moyenne du signal
re¸cu sur des distances d’une centaine de longueurs d’onde et apparaˆıt classiquement dans le bilan de liaison d’une transmission [8]. Ces att´enuations d´ependent prin-cipalement de la distance entre l’´emetteur et le r´ecepteur. L’att´enuation `a grande ´echelle impose la tendance g´en´erale et peut ˆetre compl´et´ee par deux autres fluctua-tions : `a moyenne et petite ´echelle.
– L’att´enuation `a moyenne ´echelle : elle se pr´esente sous la forme de variations de la puissance re¸cue sur des distances de l’ordre d’une dizaine de longueurs d’onde, entrain´ees principalement par les effets de masquage du signal dans dus aux les diff´erents obstacles de l’environnement dispos´es sur la trajectoire des ondes.
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
Figure 1.3 -Variations de la puissance re¸cue dans un canal radio mobile
– L’att´enuation `a petite ´echelle :elle se pr´esente sous la forme de fluctuations du signal re¸cu sur des distances de l’ordre de la longueur d’onde. Ces variations sont dues au ph´enom`ene physique de trajets multiples [13].
Les multi-trajets
Les trajets multiples sont caus´es par les interactions ´electromagn´etiques de l’onde avec des diffuseurs (bˆatiments, arbres, personnes, etc.) situ´es sur sa trajectoire. Ainsi, le signal re¸cu consiste en une superposition d’ondes provenant de toutes les directions dues aux interactions telles que des r´eflexions, diffractions, diffusions et leurs combinaisons.
On d´efinit ces interactions telles que :
– la r´eflexion/r´efraction : on parle de r´eflexion et de r´efraction lorsqu’une onde inter-agit avec une interface entre deux milieux, que les dimensions de cette interface sont grandes et ses irr´egularit´es tr`es petites devant la longueur d’onde. G´en´eralement, ces deux ph´enom`enes interviennent simultan´ement.
– La diffusion : elle intervient lorsque l’onde rencontre, lors de sa propagation, un nombre tr`es important d’obstacles de dimension du mˆeme ordre de grandeur ou inf´erieure `a sa longueur d’onde.
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
– La diffraction : lorsqu’une onde se propage et qu’elle rencontre l’arˆete ou la pointe d’un obstacle, elle subit une diffraction. Selon le principe de Huygens, toute arˆete ou pointe diffractante se comporte comme une nouvelle source qui rayonne l’´energie incidente dans presque toutes les directions de l’espace. Ce ph´enom`ene contribue significativement au niveau du signal re¸cu par un r´ecepteur en absence de visibilit´e avec l’´emetteur (NLOS : Non Line Of Sight).
La figure 1.4 illustre le ph´enom`ene de propagation multi-trajets dans un environnement urbain.
Figure 1.4 -Ph´enom`ene de multi-trajets lors de la propagation de l’onde dans un environnement ext´erieur
Dans le cas de transmission de signaux num´eriques sous la forme d’impulsions, nous observons l’apparition de r´epliques de ces impulsions au niveau du r´ecepteur. L’ensemble de ces r´epliques constitue la R´eponse Impulsionnelle (RI) du canal [13]. Elle est d´efinie par : h(t, τ) = N ∑ i=1 ˜ ai(t)δ(τ − τi(t)) (1.3)
o`u δ est l’impulsion de dirac, N est le nombre de trajets, τi et ˜ai(t) sont les retards de propagation et les gains complexes du trajet i.
La dispersion temporelle du canal, not´e τrms, est calcul´ee par :
τrms = (∑ N i=1(τi− τm)2∣∣˜ai∣∣2 ∑N i=1∣∣˜ai∣∣2 ) 1/2 (1.4)
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
o`u τm est le retard moyen calcul´e par :
τm= ∑ N i=1τi∣∣˜ai∣∣2 ∑N i=1∣∣˜ai∣∣2 (1.5)
Le param`etre τrms est un bon indicateur de l’´etalement des trajets multiples. Il permet de contrˆoler l’impact des interf´erences entre symboles (IES).
La bande de coh´erence du canal, not´ee Bc, correspond `a la gamme de fr´equences sur laquelle les amplitudes des composantes fr´equentielles du signal, fortement corr´el´ees, subis-sent des att´enuations semblables. La coh´erence fr´equentielle est li´ee au caract`ere s´electif en fr´equence du canal, dˆu aux diff´erents trajets re¸cus qui ont des retards de propagation diff´erents. En dehors de cette bande de fr´equence, les distorsions du signal deviennent non n´egligeables. On peut consid´erer l’approximation indiquant que la bande de coh´erence est du mˆeme ordre de grandeur que l’inverse de la dispersion des retards [14] : Bc ∼ τ1
rms. Si nous notons Bs la bande passante du signal ´emis, tant que Bs < Bc, toutes les com-posantes fr´equentielles du signal subissent des att´enuations semblables, et le canal est dit non s´electif en fr´equence (canal bande ´etroite).
L’effet Doppler
En plus de ces diff´erents ´evanouissements pr´esent´es pr´ec´edemment, le signal peut ˆetre sujet `a un d´ecalage de fr´equence, appel´e l’effet Doppler. Celui-ci est dˆu `a la mobilit´e des terminaux et/ou de l’environnement et est proportionnel `a la vitesse de d´eplacement ainsi qu’`a la fr´equence porteuse. Il provoque un d´ecalage fr´equentiel de chacune des ondes qui compose le signal re¸cu. Cela se traduit par une expansion fr´equentielle du spectre du signal durant la transmission et, dans le domaine temporel, par une variation de la RI en fonction du temps [15]. Le d´ecalage Doppler Bm correspond `a la diff´erence entre le plus grand et le plus petit d´ecalage en fr´equence inh´erents aux trajets multiples. On repr´esente par Tcle temps de coh´erence du canal qui caract´erise la variation temporelle du canal. Tc indique la dur´ee pendant laquelle la r´eponse impulsionnelle du canal peut ˆetre consid´er´ee comme invariante. Le temps de coh´erence est le param`etre dual du d´ecalage Doppler. Traditionnellement, Tc est du mˆeme ordre de grandeur que l’inverse du d´ecalage Doppler : Tc ∼ B1
m. Si on consid`ere Ts le temps symbole du signal ´emis, il est clair que pour ´eviter la s´electivit´e en temps, il faut respecter la contrainte : Ts< Tc.
Canal bande ´etroite
Par la suite, nous supposons que la transmission est dite bande ´etroite, c’est-`a-dire (Bs < Bc). De plus, la synchronisation et l’´echantillonnage sont parfaits car ce n’est pas ici l’objet de l’´etude. L’´echantillon `a l’instant k du signal re¸cu est :
rk= ˜hsk+ nk (1.6)
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
o`u nk est un bruit additif et ˜h est un gain complexe relatif au canal de transmission. Ce terme d´epend des ˜ai et τi des multi-trajets et de la fr´equence porteuse. Il d´epend ´etroitement de la configuration de la transmission comme l’environnement g´eographique ou le mat´eriel et il peut changer pour chaque transmission. Le gain ˜h est mod´elis´e par une variable al´eatoire selon des mod`eles statistiques du canal que nous allons pr´esenter dans le paragraphe 1.3.3.2.
1.3.3
Mod´
elisation du canal de transmission radio
Il existe dans la litt´erature de nombreux mod`eles permettant de pr´edire le comporte-ment des diff´erents ph´enom`enes du canal radio mobile. Ces mod`eles peuvent ˆetre class´es selon plusieurs crit`eres. Ils peuvent par exemple ˆetre identifi´es suivant le type de variations qu’ils mod´elisent. C’est cette classification qui est g´en´eralement adopt´ee dans le domaine des communications num´eriques [13], [15]. Dans cette section, nous ne nous int´eressons qu’aux mod`eles consid´er´es dans la th`ese bien qu’il en existe d’autres dans la litt´erature.
1.3.3.1 Mod`eles d´eterministes Mod`ele en espace libre :
Ce mod`ele permet de mod´eliser les variations `a grande ´echelle en calculant la puis-sance re¸cue dans le cas d’une transmission id´eale : l’´emetteur et le r´ecepteur sont en visibilit´e directe (LOS : Line Of Sight) et la communication se fait uniquement `a travers le trajet direct. La puissance re¸cue est donn´ee par la loi de Friis [16] :
PY = PXGXGY( λ 4πd)
2
(1.7) o`u PX et PY repr´esentent respectivement les puissances d’´emission et de r´eception en Watt, Gt et Gr repr´esentent respectivement le gain des antennes de transmission et de r´eception, λ est la longueur d’onde en m`etre et d est la distance parcourue par l’onde transmise en m`etre. `A partir de cette formule, nous pouvons constater que la puissance re¸cue d´epend uniquement de la longueur d’onde et de la distance (att´enuation en d2)
entre l’´emetteur et le r´ecepteur. Cependant, dans le cas des transmissions radio-mobiles terrestres, o`u l’onde est att´enu´ee par les diff´erents obstacles de l’environnement, cette relation n’est plus v´erifi´ee [16].
Mod`ele `a exposant (log-distance path-loss model) :
Le mod`ele `a exposant [17] mod´elise les variations `a grande ´echelle du canal. Ce mod`ele est bas´e sur le mod`ele en espace libre dans lequel est introduit une att´enuation suppl´ e-mentaire li´ee `a la nature de l’environnement de propagation. La puissance re¸cue pour ce
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
mod`ele est donn´ee par l’expression suivante [17] :
PY = PY0(d0 d )
β
(1.8) o`u PY0 repr´esente la puissance re¸cue obtenue par le mod`ele en espace libre `a une distance de r´ef´erence d0 g´en´eralement fix´ee `a 1 m`etre, et β l’exposant d’att´enuation.
Ce mod`ele consid`ere l’environnement `a travers la composante exponentielle β. La valeur de β est ´evalu´ee empiriquement dans diff´erents environnements de propagation. Par exemple, pour un environnement en espace libre, β prend la valeur 2 alors que pour un environnement urbain, β prend ses valeurs dans l’intervalle [2,5 ; 6] selon la densit´e de bˆatiments constituant l’environnement [17].
Mod`eles `a rayons :
Les mod`eles `a rayons entrent dans la famille des m´ethodes asymptotiques d´evelopp´ees pour r´epondre `a des probl`emes d’´electromagn´etisme de grandes envergures comme la sim-ulation de la propagation d’ondes ´electromagn´etiques en environnements outdoor/indoor r´eels [18]. Ces m´ethodes sont bas´ees sur l’Optique G´eom´etrique (OG) et la Th´eorie Uni-forme de la Diffraction (TUD), o`u la propagation multi-trajets de l’onde ´electromagn´etique repr´esent´ees par des rayons. Cette approche est largement adopt´ee lors de la conception de logiciels de simulation du canal de propagation qui n´ecessitent, `a leur tour, des m´ethodes pour identifier les trajets se propageant entre un ´emetteur et un r´ecepteur. Deux mod`eles d´ecoulent directement de ces m´ethodes : les mod`eles `a trac´e et `a lancer de rayons.
1. Mod`ele `a lancer de rayons : le principe de la m´ethode `a lancer de rayons consiste dans un premier temps `a inonder l’environnement de rayons partant de l’´emetteur. Suivant le parcours de chaque rayon, l’algorithme d´etermine les diff´erentes inter-actions ´electromagn´etiques entre les rayons et les obstacles constituant l’environ-nement ´etudi´e. L’algorithme consid`ere la g´eom´etrie et les propri´et´es ´electriques des mat´eriaux rencontr´es, et seuls les trajets passants `a proximit´e du r´ecepteur sont retenus pour le calcul des trajets. La pr´ecision des r´esultats obtenus par la m´ethode `
a lancer de rayons d´epend du nombre de rayons `a lancer, du pas angulaire choisi pour couvrir l’environnement 3D et du volume de la sph`ere de r´eception [19]. 2. Mod`ele `a trac´e de rayons : Le mod`ele `a trac´e de rayons [20],[21] d´etermine sans
aucune approximation les rayons qui peuvent se propager d’un ´emetteur vers un r´ecepteur. L’op´eration de recherche des rayons qui existent entre le couple ´ emetteur-r´ecepteur se fait soit par la m´ethode des images ou celle de pliage [22]. L’att´enuation de chacun des trajets re¸cus est alors due d’une part aux diff´erentes contributions de l’onde ayant interagi avec les obstacles pour lesquels les propri´et´es ´electriques (permittivit´e, conductivit´e) sont connues et d’autre part `a la propagation de l’onde
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
en espace libre calcul´ee par la loi de Friis. Le trac´e de rayons est plus pr´ecis que le lancer de rayon, puisqu’il calcule les trajets de mani`ere d´eterministe entre un ´emetteur et un r´ecepteur. Cependant, contrairement au mod`ele `a lancer de rayons, il est n´ecessaire de recourir `a une simulation pour chaque configuration d’´ emetteur-r´ecepteur.
Nous pr´esentons maintenant un simulateur de canal bas´e sur le trac´e de rayons et permettant de mod´eliser la propagation de l’onde dans un environnement quelconque.
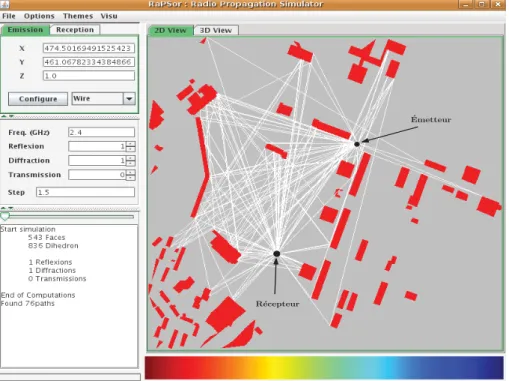
Ce logiciel repr´esente un mod`ele de propagation d´eterministe qui a ´et´e totalement d´evelopp´e au laboratoire XLIM-SIC de l’Universit´e de Poitiers [23]. Le simulateur de canal s’appuie sur l’association d’une technique de trac´e de rayons 3D, pour la recherche de trajets et une m´ethode asymptotique en fr´equence qui repose sur la th´eorie de l’Optique G´eom´etrique et la Th´eorie Uniforme de la Diffraction. Cet outil prend en entr´ee l’environ-nement de simulation, les positions de l’´emetteur et du r´ecepteur dans l’environnement, la fr´equence porteuse et le nombre d’interactions ´electromagn´etiques maximum `a prendre en compte par le simulateur. Pour une liaison ´emetteur-r´ecepteur choisie, le simulateur peut d´eterminer et caract´eriser l’ensemble des trajets existants. Nous avons ainsi acc`es aux informations relatives `a chacun des trajets (att´enuation, phase, polarisation et position des points d’interactions ´electromagn´etiques subies par l’onde avec son environnement). De ce fait, nous pouvons obtenir une r´eponse impulsionnelle (RI) complexe not´ee, h(τ), pour un point de r´eception choisi telle que :
h(τ) = N ∑ i=1 ˜ aiδ(τ − τi) avec ˜ai = aie−jθi (1.9) o`u ai est l’att´enuation du trajet i retard´e de τi et la phase θi d´epend de l’interaction ´electromagn´etique consid´er´ee. La figure 1.5 illustre le principe de ce simulateur et la figure 1.6 montre l’interface utilisateur.
Il est ´egalement possible de suivre l’´evolution de cette RI en consid´erant un parcours de d´eplacement de l’´emetteur et/ou du r´ecepteur. Ce simulateur de propagation permet aussi le calcul de la zone de couverture d’un terminal positionn´e dans l’environnement. Cet outil int`egre toutes les sp´ecificit´es (g´eom´etriques et ´electriques) li´ees `a l’environnement, et mod´elise toutes les variations d’un canal radio mobile : variations `a petite, `a moyenne et `
a grande ´echelle. Enfin, ce logiciel offre la possibilit´e de travailler en indoor ou en outdoor. Ce simulateur est utilis´e dans certaines parties de nos travaux pour obtenir un mod`ele r´ealiste du canal de transmission.
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
Figure 1.5 - Synoptique du simulateur de canal `a trac´e de rayons 3D
´ Emetteur
R´ecepteur
Figure 1.6 - Pr´esentation du simulateur : description de l’environnement, calculs des multi-trajets et position ´emetteur/r´ecepteur
1.3.3.2 Mod`eles statistiques
Les mod`eles statistiques [15] pr´edisent de mani`ere stochastique le comportement du canal sur de larges zones. G´en´eralement ces mod`eles sont moins pr´ecis que les mod`eles d´eterministes et associent une loi statistique `a un ensemble d’environnements ou de config-urations de transmission partageant les mˆemes sp´ecificit´es. Cependant, ils ont l’avantage d’ˆetre simples, et n´ecessitent de faibles capacit´es en temps de calcul. Nous allons pr´esenter les deux mod`eles les plus utilis´es dans un contexte de r´eseau sans fil.
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
Mod`ele de Rayleigh :
Le mod`ele de Rayleigh mod´elise `a l’aide de la distribution de Rayleigh les variations rapides de l’amplitude du signal re¸cu. Lorsque le signal re¸cu y est la somme d’un grand nombre de trajets d’amplitudes∣yi∣ faibles et de mˆeme ordre de grandeur, et que la valeur de la phase ϕi de chaque trajet est uniform´ement r´epartie sur l’intervalle[−π, π], on peut alors consid´erer la densit´e de probabilit´e (DDP) de la somme des trajets re¸cus comme une gaussienne. En effet, les valeurs d’amplitude et de phase repr´esentent les r´ealisations de deux variables al´eatoires gaussiennes ind´ependantes. En cons´equence, d’apr`es le th´eor`eme central limite, la DDP de la somme des variables yi est aussi gaussienne. Dans une trans-mission r´eelle, ces conditions sont souvent v´erifi´ees lors d’une communication NLOS dans un environnement de propagation riche en multi-trajets. Dans de telles conditions, l’am-plitude z du signal re¸cu y est d´ecrite par la DDP de Rayleigh [15] :
Pz(z) = z
σ2exp(−
z2
2σ2) (1.10)
avec σ2 la puissance moyenne du signal re¸cu.
Mod`ele de Rice :
Le mod`ele de Rice mod´elise aussi les variations rapides de l’amplitude du canal ra-dio mobile mais lorsqu’il existe un trajet pr´edominant, par exemple le trajet direct LOS. Ainsi, les statistiques de l’amplitude et de la phase ne correspondent plus au cas pr´ec´edent. On peut alors montrer que dans de telles conditions la DDP de l’amplitude z suit la DDP de Rice [15] : Pz(z) = z σ2exp(− z+ u2 σ2 )I0( ux σ2) (1.11)
o`u I0(x) est la fonction de Bessel modifi´ee d’ordre 0 et u2 repr´esente le rapport entre la
puissance du trajet pr´edominant et celle r´esultante des autres trajets. On peut constater que quand u= 0 on retrouve la DDP de Rayleigh.
Ces deux mod`eles peuvent ˆetre utilis´es pour mod´eliser le gain complexe ˜h relatif au canal de transmission bande ´etroite (Eq. 1.6). `A cot´e de ces deux mod`eles, il en existe d’autres comme le mod`ele log-normal Shadowing [13] et le mod`ele de Nakagami [15].
1.4
Notion de diversit´
e
Les canaux consid´er´es dans la pr´esentation pr´ec´edente prennent en compte les multi-trajets engendrant des ´evanouissements `a faible ´echelle. La diversit´e est utilis´ee dans les syst`emes de transmission sans fil pour combattre l’´evanouissement `a faible ´echelle caus´e par les multi-trajets. En effet, si plusieurs r´epliques de l’information sont re¸cues par des
CHAPITRE 1. LES COMMUNICATIONS NUM´ERIQUES ET LES SYST`EMES MIMO
liaisons dont les ´evanouissements respectifs sont ind´ependants les uns des autres, il y a une tr`es forte probabilit´e pour que l’une de ces liaisons au moins ne subisse pas de forte att´enuation, augmentant ainsi la fiabilit´e de la liaison. La diversit´e se r´ev`ele donc ˆetre un outil tr`es puissant pour combattre les ´evanouissements et am´eliorer les performances (diminution du TEB), et permet notamment d’augmenter la capacit´e et la couverture des syst`emes radios. Les diff´erentes formes de diversit´e traditionnellement exploit´ees en communications num´eriques sont [24] :
– La diversit´e temporelle : elle s’applique pour les canaux s´electifs en temps. L’infor-mation est r´ep´et´ee dans le temps `a intervalles plus grands que le temps de coh´erence du canal (dur´ee minimale entre deux ´evanouissements ind´ependants). La diversit´e temporelle est g´en´eralement utilis´ee avec de l’entrelacement et du codage correcteur d’erreur.
– La diversit´e fr´equentielle : elle s’utilise pour les canaux s´electifs en fr´equence. L’infor-mation est r´ep´et´ee sur une bande de fr´equence plus large que la bande de coh´erence du canal (espacement fr´equentiel minimal entre deux fr´equences affect´ees d’´ evanoui-ssements ind´ependants). La diversit´e fr´equentielle s’emploie g´en´eralement `a l’aide de techniques d’´etalement de spectre ou multi-porteuses [25], [26].
– La diversit´e de polarisation : un mˆeme signal ou une r´eplique redondante est ´emis en utilisant des ondes polaris´ees diff´eremment [27], [28]. La solution la plus courante est l’utilisation de deux polarisations orthogonales, comme la verticale et l’horizon-tale par exemple. Il faut n´eanmoins que les caract´erisiques de propagation des deux ondes soient diff´erentes.
– La diversit´e spatiale : elle consiste `a utiliser plusieurs antennes distantes d’au moins la distance de coh´erence du canal (distance minimale pour obtenir des ´evanouisse-ments ind´ependants). La diversit´e spatiale existe `a l’´emission et en r´eception. Les syst`emes MIMO permettent de cr´eer une diversit´e spatiale tr`es importante [29].
1.5
Introduction aux syst`
emes multi-antennaires
1.5.1
Pr´
esentation des syst`
emes MIMO
Les communications sur le canal radio-mobile se sont fortement d´evelopp´ees ces derni` er-es ann´ees, aussi bien en terme de nombre d’utilisateurs que de d´ebit par utilisateur. Ceci entraˆıne la saturation des ressources radio-fr´equence dans les lieux de forte population. D’un autre cˆot´e, les transmissions via le canal radio-mobile sont fortement p´enalis´ees par les ´evanouissements du signal, dus `a la fois aux trajets multiples et aux interf´erences entre symboles. Pour pallier ces inconv´enients, une solution est ´etudi´ee depuis quelques ann´ees. Il s’agit d’une architecture de transmission bas´ee sur l’utilisation de plusieurs antennes `a l’´emission et `a la r´eception. Ces architectures, dites MIMO, ont ´et´e d´evelopp´ees par les