Le routage de l’information dans les réseaux
véhiculaires mobiles
Mémoire Olivier Rivaton Maîtrise en informatique Maître ès sciences (M.Sc.) Québec, Canada © Olivier Rivaton, 2016Résumé
Les réseaux véhiculaires mobiles, ou Vehicular Ad-hoc NETworks (VANETs), existent depuis les années 80, mais sont de plus en plus développés depuis quelques années dans différentes villes à travers le monde. Ils constituent un apport d’informations aux réseaux routiers grâce à la mise en place de communications entre ses constituants : principalement les véhicules, mais aussi certaines infrastructures de bords de routes liées directement aux automobilistes (feux de circulation, parcomètres, infrastructures spécialisées pour les VANETset bien d’autres). L’ajout des infrastructures apporte un support fixe à la dissémination des informations dans le réseau. Le principal objectif de ce type de réseau est d’améliorer la sécurité routière, les conditions de circulations, et d’apporter aux conducteurs et aux passagers quelques applications publicitaires ou de divertissement. Pour cela, il est important de faire circuler l’information de la manière la plus efficace possible entre les différents véhicules. L’utilisation des infrastructures pour la simulation de ces réseaux est bien souvent négligée. En effet, une grande partie des protocoles présentés dans la littérature simulent un réseau ad-hoc avec des nœuds se déplaçant plus rapidement et selon une carte définie. Cependant, ils ne prennent pas en compte les spécificités même d’un réseau véhiculaire mobile. Le routage de l’information dans les réseaux véhiculaires mobiles utilise les infrastructures de façon certes opportuniste, mais à terme, les infrastructures seront très présentes dans les villes et sur les autoroutes. C’est pourquoi nous nous sommes concentrés dans ce mémoire à l’étude des variations des différentes métriques du routage de l’information lors de l’ajout d’infrastructures sur une autoroute avec l’utilisation du protocole de routage
AODV. De plus, nous avons modifié le protocole AODV afin d’obliger les messages à emprunter le chemin passant par les infrastructures si celles-ci sont disponibles. Les résultats présentés sont encourageants, et nous montrent qu’il est important de simuler les réseaux VANETsde manière complète, en considérant les infrastructures.
Abstract
Vehicular Ad-hoc NETwork (VANET) were created in the early 80’s but have been developped for the last few years in many cities around the world. They add informa-tions to the road network by including wireless communicainforma-tions between its component. Mainly the vehicles, but also numerous RoadSide Units (RSU) which are directly in re-lation with the road network (traffic light, meter, but also specialized units and more). The addition of RSUs help the network to disseminate the informations across the net-work. The main goal of this type of networks is to improve road safety and road traffic, as well as providing driver and passengers with advertisement and entertainment ap-plications. In order to accomplish these aims, a good routing of the information in this kind of networks is a key. Unfortunately, the use of the RSUs in the simulations of
VANETs is often missed. Indeed, the major parts of research on the matter of routing inVANETsare a simulation of a mobile ad-hoc network with only some improvements : controlled movement of faster nodes. They do not use the full description of a ve-hicular ad-hoc network. The routing in these networks use RSU in an opportunistic way but in the end, the RSUs should be deployed massively so they have to be ack-owledged. In this research, we concentrate on the study of the variations of routing metrics when RSUs are added to the simulations. The routing protocol used is AODV, and we present a modification of it, to force messages to use the path which contains RSU(s) if they exist. The results are encouraging and show us that in the simulation of a real vehicular ad-hoc networks, it is important to consider the roadside units.
Table des matières
Résumé iii
Abstract v
Table des matières vii
Liste des tableaux ix
Liste des figures xi
Remerciements xix 1 Introduction 1 1.1 Concepts de base . . . 2 1.2 Problématique . . . 4 1.3 Objectifs de recherche . . . 5 1.4 Organisation du mémoire . . . 5
2 Caractérisation des VANETs 7 2.1 Présentation générale . . . 7
2.1.1 Historique . . . 7
2.1.2 Caractéristiques intrinsèques . . . 9
2.1.3 Technologies de transmission et de diffusion . . . 9
2.1.4 Diffusion de données . . . 12
2.2 Contextes d’utilisation . . . 13
2.2.1 Applications de sécurité publique . . . 13
2.2.2 Coordination du trafic automobile . . . 14
2.2.3 Gestion du trafic routier . . . 14
2.2.4 Applications de confort . . . 15 2.3 Déploiement . . . 15 2.4 Modèle de Mobilité . . . 17 2.4.1 Environnement de Mobilité : . . . 18 2.4.2 Modèles analytiques : . . . 19 2.4.3 Modèles physiques : . . . 21
2.4.4 Modèles empiriques et pilotés par les données : . . . 21
3 Analyse du problème de routage 23
3.1 Protocoles de routages dans les VANETs . . . 23
3.1.1 Classification . . . 24
3.1.2 Protocoles Unicast Ad-hoc et leurs adaptations pour les VA-NETs . . . 26
3.1.3 Protocoles Unicast de groupe . . . 27
3.1.4 Protocoles Unicast basé sur la position . . . 28
3.1.5 Protocoles Broadcast . . . 31
3.1.6 Protocoles Multicast et Geocast . . . 32
3.2 Principe de fonctionnement du protocole AODV . . . 32
3.3 Paramètres . . . 35 3.3.1 Métriques d’environnement. . . 35 3.3.2 Métriques de performances . . . 36 3.3.3 Modèle de trafic . . . 38 3.3.4 Modèle de propagation . . . 39 3.4 Formulation du problème . . . 40
3.5 Analyse des solutions . . . 42
4 Mise en œuvre et résultats 49 4.1 Modification du protocole AODV . . . 49
4.1.1 Présentation de notre solution et Justification . . . 49
4.1.2 Environnement de simulation . . . 53
4.1.3 Configuration des paramètres d’entrées . . . 54
4.2 Plan d’expérience et présentation des résultats . . . 59
4.2.1 Plan d’expérience . . . 59
4.2.2 Résultats . . . 65
4.2.3 Analyse . . . 68
5 Conclusion 79 5.1 Synthèse des résultats . . . 79
5.2 Limitations . . . 81
5.3 Travaux futurs . . . 82
Bibliographie 83 A Programmes 91 A.1 Script tcl détaillé pour un réseau de noeuds mobiles avec ns2 . . . 91
A.2 Pseudo-code du fichier d’automatisation des simulations. . . 95
A.3 Extrait d’un fichier trace produit par Ns-2 . . . 96
A.3.1 Extrait du fichier . . . 96
A.3.2 Légende . . . 96
A.4 Fichier awk : Traitement pour le PDR . . . 97
Liste des tableaux
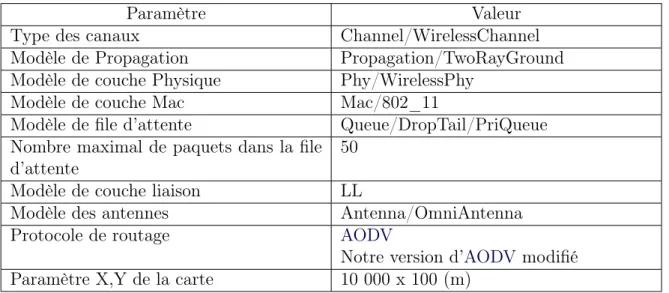
4.1 Paramètres de simulation d’un VANET . . . 57
4.2 Paramètres fixes de la simulation . . . 64
4.3 Paramètres variables de la simulation . . . 64
Liste des figures
1.1 Illustration d’un MANET . . . 2
1.2 Type de communication dans les VANETs . . . 3
2.1 Bandes allouées pour les VANETs aux États-Unis . . . 11
2.2 Bandes allouées pour les VANETs en Europe. . . 11
2.3 Aide au stationnement grâce aux VANETs . . . 16
2.4 Principaux projets de déploiements et de tests . . . 18
3.1 Les différents types de routages . . . 25
3.2 Classifications des protocoles de routages dans les VANETs. . . 26
3.3 Cluster-based Routing . . . 28
3.4 Greedy Routing . . . 29
3.5 Face Routing . . . 29
3.6 GPCR Routing . . . 30
3.7 Méthode de construction d’une route . . . 33
3.8 Principe de détection d’un lien défaillant . . . 34
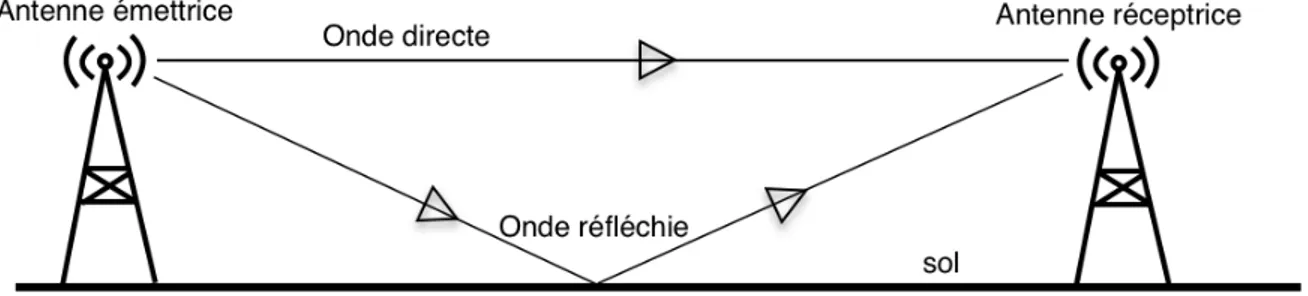
3.11 Modèle de propagation Two-ray ground. . . 40
3.9 Traitement des messages RREQ . . . 47
3.10 Traitement des messages RREP . . . 48
4.1 Traitement des messages RREQ modifié . . . 51
4.2 Traitement des messages RREP modifié . . . 52
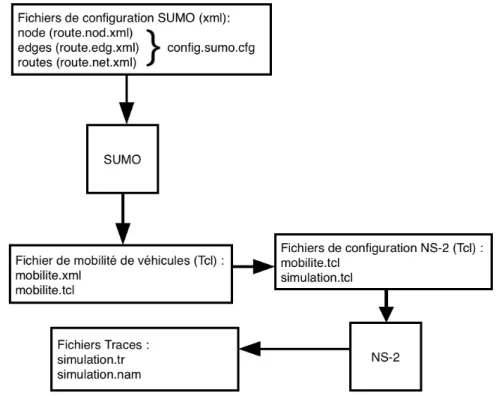
4.3 Processus de simulation d’un VANET avec SUMO et NS-2 . . . 54
4.4 Exemple de configuration des nœuds avec SUMO . . . 55
4.5 Exemple de configuration d’une liaison avec SUMO . . . 55
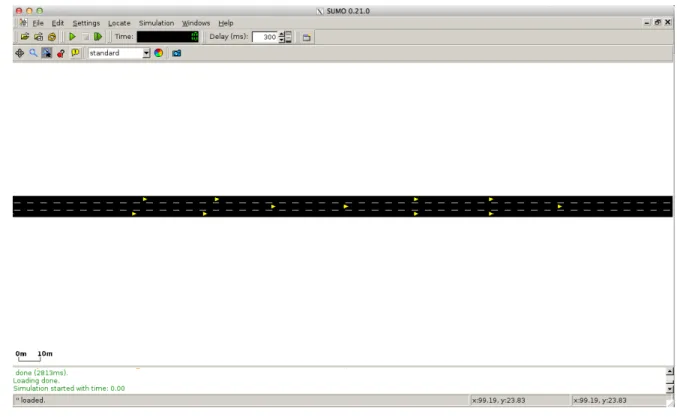
4.6 Visualisation d’une autoroute grâce à l’interface graphique de SUMO . . 56
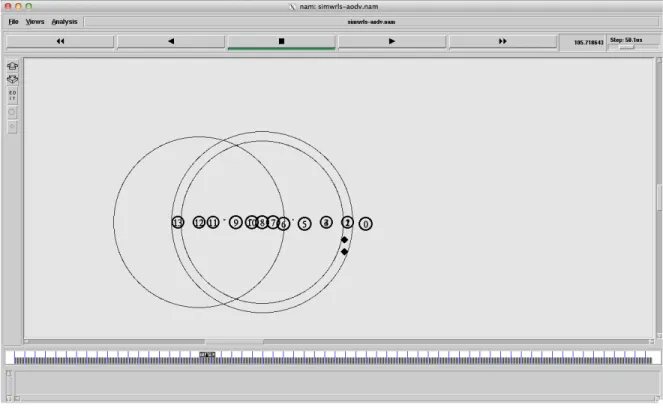
4.7 Interface Graphique de Ns-2, Nam . . . 58
4.8 Distance de communication . . . 62
4.9 Exemple d’ajout d’un nœud fixe . . . 63
4.10 Positionnement d’un RSU . . . 63
4.11 Positionnement de deux RSUs . . . 63
4.12 Positionnement de trois RSUs . . . 63
4.13 Positionnement de quatre RSUs . . . 64
4.14 Réaction des différents protocoles à l’augmentation du nombre de RSUs en terme de délais de bout en bout . . . 66
4.15 Réaction des différents protocoles à l’augmentation du nombre de RSUs
en terme de ratio de livraison des paquets . . . 67
4.16 Réaction des différents protocoles à l’augmentation du nombre de RSUs en terme de nombre de sauts moyen de bout en bout . . . 68
4.17 Réaction des différents protocoles à l’augmentation du nombre de RSUs en terme de charge du réseau moyen . . . 69
4.18 Évolution des délais de bout en bout en fonction du nombre de véhicules dans le cas où il y a trois RSUs . . . 70
4.19 Évolution du PDR en fonction du nombre de véhicule dans le cas où il y a trois RSUs. . . 71
4.20 Évolution du nombre de sauts moyen en fonction du nombre de véhicule dans le cas où il y a trois RSUs . . . 72
4.21 Évolution de la charge du réseau moyen en fonction du nombre de véhi-cules dans le cas où il y a trois RSUs . . . 73
4.22 Délai moyen de bout en bout en fonction de la vitesse dans le cas où il y a 200 véhicules et trois RSUs . . . 74
4.23 PDR moyen en fonction de la vitesse dans le cas où il y a 200 véhicules et trois RSUs . . . 75
4.24 Nombre de sauts moyen en fonction de la vitesse dans le cas où il y a 200 véhicules et trois RSUs . . . 76
4.25 Charge du réseau moyen en fonction de la vitesse dans le cas où il y a 200 véhicules et trois RSUs . . . 77
B.1 Résultats avec 0 RSU. . . 100
B.2 Résultats avec 1 RSU. . . 101
B.3 Résultats avec 2 RSU. . . 102
B.4 Résultats avec 3 RSU. . . 103
Sigles et Acronymes
Symbols (glossaries)
3G 3e Génération.
4G 4e Génération.
A
A-STAR Anchor-based Street and Traffic Aware Routing.
AODV Ad-hoc On-Demand Distance Vector Routing.
C
C-Vet UCLA Campus Vehicular Testbed.
C2C-CC "Car 2 Car Communication Consortium". CAR Connectivity Aware Routing protocol.
CarTel Car Telecommunications.
CBQ Class Based Queuing.
CBR Constant Bit Rate.
CCH Control Channel.
COIN Clustering for Open Inter-vehicular communication Networks.
D
DIR Diagonal Intersection based Routing protocol.
DRR Deficit Round Robin.
DSDV Dynamic destination-Sequenced Distance Vector.
DSR Dynamic Source Routing.
DSRC Dedicated Short Range Communications. DV-CAST Distributed Vehicular Broadcast.
E
ESRI Environmental Systems Research Institute.
F
FCC Federal Communications Commission.
FIFO First In First Out.
FQ Fair Queuing.
FTP File Transfer Protocol.
G
GPCR Greedy Perimeter Coordinator Routing.
GPS Global Positioning System.
GPSR Greedy Perimeter Stateless Routing.
H
HV-TRADE History-enhanced V-TRADE.
I
I2V Infrastructure to Vehicule.
IEEE Institute of Electrical and Electronics Engineers.
ITS Intelligent Transport System.
IVG Inter Vehicular Geocast.
J
JoBS Joint Buffer Management Scheduling.
JSK Association of Electronic Technology for Automobile Traffic and Driving.
L
LORA_CBF Location Routing Algorithm with Cluster-Based Flooding.
LTE Long Term Evolution.
M
MAC Media Access Control.
MGRP Mobile Gateway Routing Protocol.
MIBR Mobile Infrastructure Based VANET Routing protocol.
MIT Massachusetts Institute of Technology.
MMTS Multi-agent Microscopic Traffic Simulator.
N
Nam Network Animator.
NCTU Université Nationale Chiao-Tung.
NRO Normalized Routing Overhead.
NS-2 The Network Simulator 2.
O
OLSR Optimized Link State Routing Protocol.
ORBIT Open-Access Research Testbed for Next-Generation Wireless Networks.
OSI Open System Interconnection.
P
PDR Packet Delivery Ratio.
PR-AODV Predicted AODV.
R
RD Random Direction Model.
RED Random Early Discard buffer management.
RPGM Reference Point Group Mobility model.
RSU Roadside Units.
RTP Real-time Transfer Protocol.
RW Random Walk.
RWP Random Waypoint.
S
SADV Static-node-assisted Adaptative data Dissemination in Vehicular networks.
SCH Service Channel.
SJTU Shanghai Jiao Tong University.
SLAW Self-Similar Least-Action Walk.
SRB Secure Ring Broadcasting Routing Protocol.
SUMO Simulation of Urban Mobility.
T
TCP Transmission Control Protocol.
TIGER Topologically Integrated Geographic Encoding and Referencing.
TraNS Traffic and Network Simulation Environment.
U
UCLA University of California, Los Angeles.
UDP User Datagram Protocol.
UMASS University of Massachusetts.
V
V-TRADE Vector-based TRAcking DEtection.
V2I Vehicle to Infrastructure.
V2V Vehicle to Vehicle.
VANET Vehicular Ad-hoc NETwork.
VeiNS Vehicles in Network Simulation.
W
WAVE Wireless Access in Vehicular Environment.
WiMax Worldwide Interoperability for Microwave Access.
WSN Wireless Sensor Networks.
Z
ZOF Zone of Forawarding.
Je dédie ce mémoire à France et à mes parents
Remerciements
J’aimerais remercier les personnes qui m’ont accompagné tout au long de la réalisation de ce mémoire.
Dans un premier temps, mon directeur de recherche, M. Ronald Beaubrun qui a su me guider, m’accompagner et être toujours disponible lorsque j’en avait besoin.
Ensuite, j’aimerais remercier mon école en France, l’ECAM Rennes, ainsi que l’Univer-sité Laval, et tout le personnel encadrant, qui m’ont permis grâce à la mise en place de leur échange, de participer à ce programme. Je remercie en particulier Mme Hé-lène Crunel et M. Nadir Belkhiter qui ont mis en place le double diplôme en Génie Informatique l’année de mon arrivée au Québec.
Je remercie aussi mes amis, français et québécois, pour tout les moments partagés au cours de ces deux années de recherches et de rédaction. J’ai pu grâce à eux être en mesure d’allier travail et loisir afin de garder un rythme de vie équilibré. Je remercie également la société LeLynx.fr dans laquelle j’ai effectué mon stage de fin d’études. J’ai pu grâce à eux finaliser la rédaction de ce mémoire tout en mettant un premier pieds dans le monde professionel.
Finalement, je remercie ma famille, Andrée-Claire et Franck Rivaton ainsi que Violaine, Adèle et Éléonore, qui m’ont soutenu, poussé et encouragé tout au long de mes études, en France et au Québec.
Chapitre 1
Introduction
Le nombre de véhicules en circulation est de plus en plus important. En 2010, nous avons dépassé le milliard de voitures sur les routes, et l’augmentation est en moyenne de 35 millions par an [1]. Liés à cette croissance constante, les accidents de la route font partie des dix principales causes de mortalité dans le monde [2]. Afin de réagir à cette si-tuation, l’amélioration de la sécurité routière est devenue une préoccupation. C’est dans cet esprit que sont apparues un certain nombre de recherches qui visent non seulement à réduire le nombre de morts sur les routes et à améliorer les conditions de la circulation, mais aussi à diminuer les embouteillages et la pollution [3]. Les réseaux véhiculaires mobiles, mieux connus sous le nom de Vehicular Ad-hoc NETwork (VANET), se sont fixés ces objectifs. Ce domaine de recherche intéresse aussi bien les universitaires que les industriels de l’automobile et les grandes entreprises de l’innovation (comme Google), qui travaillent actuellement sur trois projets majeurs [4] :
1. Assistance à la conduite (self-parking, aide au dépassement, radar anticollision, régulateur de vitesse, etc.) ;
2. Réseaux de communication entre les véhicules ; 3. Voitures autonomes.
Ce sont les réseaux de communications entre les véhicules et plus particulièrement le routage de l’information qui nous intéressent dans ce mémoire. Pour acheminer les informations d’un véhicule à un autre à travers un réseau composé de beaucoup de véhicules, se déplaçant à des vitesses atteignant 160 km/h, il est nécessaire d’effectuer un routage rapide et efficace de l’information.
Dans cette introduction, la Section 1.1 donne un aperçu des réseaux véhiculaires mobiles, ainsi que du routage de l’information dans ces réseaux. Ensuite, la Section 1.2
établit les éléments de la problématique. La Section 1.3 présentera les objectifs de ce mémoire, alors que la Section1.4 présentera son organisation.
1.1
Concepts de base
Un réseau véhiculaire mobile est un réseau de type ad-hoc. Un réseau ad-hoc est capable de se mettre en place de façon autonome, c’est-à-dire sans l’aide d’aucune infrastructure préparée à l’avance [3]. Les communications se font alors directement entre les différents nœuds du réseau. On distingue deux types de réseaux mobiles ad-hoc : lesMobile ad-hoc Networks (MANETs), illustrés à la Figure1.1, et les VANETs. Les MANETs sont les plus connus. Ils sont utilisés pour établir des communications de façon rapide et autonome dans des zones démunies de toute couverture de réseau (comme par exemple, en cas de catastrophe naturelle ou dans une zone de combats). LesVANETssont utilisés pour établir des communications entre tous les véhicules qui circulent sur les routes. Mais, les VANETs ne sont pas des réseaux purement ad-hoc. Ils peuvent utiliser, de façon opportuniste, les communications avec des infrastructures, permettant ainsi un accès à d’autres réseaux et donc aussi, à Internet. Les différentes infrastructures utilisées dans le cadre desVANETs sont appelées «Unités de Bords de Routes», de l’anglais Roadside Units (RSU) [5]. Ces unités peuvent être des feux de circulation, des parcomètres, ou toute autre borne placée au bord de la route.
Figure 1.1 – Illustration d’un MANET
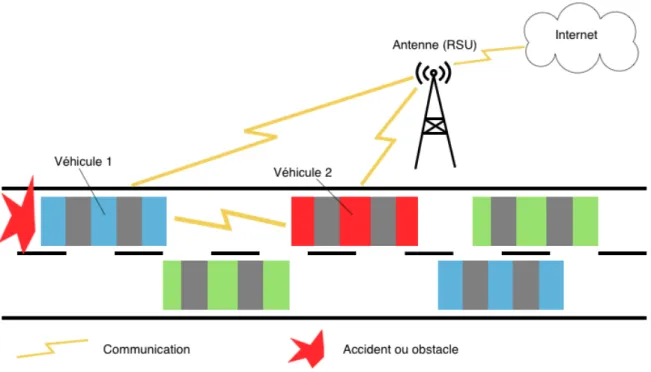
On distingue dans les VANETsdeux types de communications : les communications entre les véhicules,Vehicle to Vehicle (V2V), et les communications entre les véhicules et lesRSUs,Vehicle to Infrastructure (V2I)ouInfrastructure to Vehicule (I2V). L’utili-sation desRSUsoffre un accès à Internet ou à des bases de données locales, permettant de la publicité ciblée en fonction de la localisation du véhicule. Les communicationsV2I
particulières (en cas d’urgence, ou lors d’absence deRSUdans la zone de transmission), le réseau utilise les communications ad-hoc. Les véhicules peuvent être en mesure d’ac-céder au réseau via les RSUs, mais choisiront les communications ad-hoc plutôt que
V2I, si cette dernière est trop gourmande, trop chère, ou inadéquate.
Afin d’illustrer ces différents concepts, la Figure 1.2 nous montre deux véhicules qui s’échangent des données. Ces données sont, par exemple, du contenu multimédia volumineux. Dans ce cas, on préfère donc la connexion stable allant du véhicule 1 au
RSU, puis du RSU au véhicule 2, ou dans le sens inverse. Ce sont des communications
V2IetI2V. Cette connexion permet d’accéder à du contenu supplémentaire, car leRSU
est généralement relié à Internet. Cependant, lors de la rencontre de l’obstacle par le Véhicule 1, le message d’urgence sera transféré de façon ad-hoc directement du véhicule 1 au véhicule 2, ce qui permettra un délai de transmission plus court que si le message été passé par le RSU : c’est une communicationV2V.
Figure 1.2 – Type de communication dans les VANETs
Les VANETs peuvent utiliser différentes technologies de communication : les com-munications issues des réseaux mobiles, comme par exemple la 3e Génération (3G), la 4e Génération (4G), ainsi que les technologies Wi-Fi et Worldwide Interoperability for Microwave Access (WiMax). Cependant, ils utiliseront en priorité une technologie
Wi-Fi qui a été développée spécialement pour être utilisé dans ce type de réseau : la technologie Dedicated Short Range Communications (DSRC).
Le routage est une méthode d’acheminement des informations vers la bonne desti-nation à travers un réseau de connexion donnée. Il consiste à assurer une stratégie qui garantit, à tous moments, un établissement de routes qui soient correctes et efficaces entre n’importe quelle paire de nœuds appartenant au réseau. L’objectif du routage de l’information est d’assurer l’échange des messages d’une manière continue. Vu les limitations des réseaux ad-hoc, la construction des routes doit être faite avec un mi-nimum de contrôle et de consommation de la bande passante [6]. En prenant de plus en considération les caractéristiques des réseaux véhiculaires mobiles, il est important de minimiser à la fois les délais d’acheminement et les pertes des messages échangés entre les véhicules. Dans ce contexte, le réseau doit être robuste et avoir un temps d’at-tente très court : il doit être capable de survivre à la grande mobilité et doit pouvoir transférer rapidement les messages du véhicule source vers le véhicule destinataire. Afin de réduire les délais des messages les plus importants, on peut catégoriser les types de messages qui transitent sur le réseau, non pas en deux groupes (les messages de sécurité pour le conducteur et les «messages commerciaux» pour les passagers), mais en plu-sieurs sous-catégories au sein de ces deux groupes, afin de pouvoir gérer efficacement le réseau. Les messages les plus importants, qui relèvent de la sécurité et de la prévention des accidents, seront alors envoyés en priorité.
Un aspect important desVANETsqui ne sera pas pris en compte dans ce mémoire est la sécurité. Le réseau se doit d’être verrouillé afin qu’aucune personne mal intentionnée ne puisse envoyer de faux messages d’urgence qui pourraient mener à des résultats dangereux.
1.2
Problématique
Le routage de l’information dans les réseaux véhiculaires mobiles n’est pas un pro-blème simple [5]. En effet, les VANETs sont des réseaux spontanés qui doivent être en mesure de se mettre en place de façon autonome. De plus, lesVANETssont utilisés pour l’amélioration de la sécurité routière, c’est-à-dire pour la prévention et la diminution des accidents de la route. Dans ce contexte, les messages qui transitent sur le réseau se doivent d’être délivrés dans des délais courts et sans perte. Afin de répondre à ces problèmes, les chercheurs ont développé un certain nombre de méthodes de routage de
l’information [7–26]. Toutefois, la plupart de ces protocoles ne prennent pas en compte les différentes spécificités qu’implique un réseau véhiculaire mobile et ne sont souvent efficaces que dans des situations particulières. En effet, unVANET doit être efficace en ville, en campagne et sur autoroute, dans des situations d’embouteillages, de circulation fluide, mais aussi dans les situations d’urgences.
Un autre aspect important desVANETsqui est souvent négligé lors de l’établissement de protocoles de routage est sa possibilité de communiquer via les infrastructures de bords de routes. Les Réseaux véhiculaires mobiles sont souvent pris pour des réseaux purement ad-hoc lors des simulations [7–21]. Ainsi, pour transmettre efficacement les messages vers leurs destinataires, il faut être en mesure d’exploiter les deux types de communications : V2V et V2I. Quelques protocoles proposent ce type de routage [22–
25], mais ces derniers sont souvent peu développés malgré des résultats prometteurs.
1.3
Objectifs de recherche
Dans ce mémoire, nous visons à concevoir et à mettre en place une méthode de routage qui permettra de minimiser les délais de transmission et les pertes de messages dans les VANETs. De manière plus précise, nous visons les objectifs suivants :
1. Étudier les spécifications des réseaux véhiculaires mobiles afin de comprendre et d’identifier le mieux possible les différents défis et enjeux du routage de l’infor-mation dans ces réseaux ;
2. Identifier, à travers une étude complète des méthodes et protocoles de routage, les différents critères d’évaluation de performances, afin de distinguer les points forts et points faibles de ces protocoles, dans le contexte d’un réseau véhiculaire mobile ;
3. Proposer une méthode de routage répondant au mieux à la problématique et évaluer ses performances.
1.4
Organisation du mémoire
Le mémoire est composé de cinq chapitres. Le deuxième chapitre va présenter de manière générale les réseaux véhiculaires mobiles et leurs spécifications. Le troisième chapitre va se concentrer sur les aspects de routage de l’information. Après une rapide présentation de ce qu’est un protocole de routage, ce chapitre approfondira les aspects
du routage de l’information liés aux réseaux véhiculaires mobiles. Le quatrième chapitre présentera notre mise en œuvre ainsi que les résultats obtenus au cours de cette maitrise. Le mémoire sera conclu par le cinquième chapitre.
Chapitre 2
Caractérisation des VANETs
Ce chapitre, divisé en quatre sections, caractérise lesVANETs. Il présente dans la pre-mière section les réseaux véhiculaires mobiles de manière générale, à travers un rapide historique, quelques caractéristiques particulières et une présentation des technologies de transmission et de diffusion utilisées dans les VANETs. Ensuite, la seconde section expose les différentes possibilités d’applications de ces réseaux. La troisième section présente les étapes de déploiement, et la quatrième et dernière section va conclure ce chapitre en faisant un aperçu des modèles de mobilités dans les VANETs.
2.1
Présentation générale
2.1.1
Historique
C’est au début des années 80 que les premières études, portant sur des communi-cations entre véhicules et infrastructure, ont été menées au Japon à travers le projet
JSK (Abbréviation japonaise pour "Association of Electronic Technology for Automo-bile Traffic and Driving") [27]. Plus tard, d’autres projets ont été créés aux États-Unis et en Europe [5]. La motivation première de ces projets a toujours été l’amélioration de la sécurité routière et la diminution du nombre de morts sur les routes. Ce n’est que plus tard que les applications de type commercial sont venues s’ajouter à l’équa-tion. La recherche sur ces réseaux a vraiment commencé à croitre au début des années 2000, avec la création de projets tels que «CarTalk 2000» en Europe [28], «Advance Safety Vehicle 3» au Japon [29], et «Vehicle Safety Communication» aux États-Unis [30]. Des ateliers et conférences internationales ont ensuite été créés afin de rassembler les industriels et les universitaires pour échanger sur leurs projets. En Europe,
plu-sieurs constructeurs d’automobiles se sont rassemblés pour créer une organisation à but non lucratif ayant pour but principal d’augmenter la sécurité routière : le "Car 2 Car Communication Consortium" (C2C-CC)[31]. Cette organisation rassemble maintenant un très grand nombre de membres et travaille en coopération avec les organismes de certifications et de standardisations européens afin de développer le déploiement des réseaux véhiculaires mobiles.
En 2009, l’Institute of Electrical and Electronics Engineers (IEEE), a publié le stan-dard 802.11p qui définit l’accès sans fil dans les réseaux véhiculaires mobiles (Wireless Access in Vehicular Environment (WAVE)) [32].
Très vite, les chercheurs se sont intéressés à un nouveau type d’adressage et de rou-tage des paquets de données [3,33,34]. Plutôt que d’utiliser la méthode IP, il a été mis en place une méthode géographique appelée GeoCast, basée sur les standards DSRC
etIEEE 802.11, pour fournir une communication multi-sauts sans fil, et ce, sans l’aide d’infrastructure (par comparaison avec le Global Positioning System (GPS) qui néces-site un réseaux de satellite, à ne pas confondre avec les infrastructure de bords de route ou RSU). GeoCast permet ainsi d’étendre les communications de courte portée, four-nie par DSRC, à des communications multi-sauts. Geocast a d’abord été conçu pour les MANETs, mais a très vite été étendu à d’autres réseaux tels que les VANETs, les réseaux de senseurs sans fil, Wireless Sensor Networks (WSN), ou les réseaux maillés (Mesh Networks) [33]. Ce type d’adressage est en effet bien adapté aux réseaux mobiles dynamiques, ayant des changements de topologies fréquents, avec ou sans infrastruc-ture, et supportant des connexions intermittentes.
Ce concept a été introduit vers la fin des années 80 [35]. Ce n’est que quelques années plus tard qu’il a été présenté en conférence [36], puis au début des années 2000, le protocole de routageGreedy Perimeter Stateless Routing (GPSR)[10] devint un des premiers algorithmes de routage utilisant ce type d’adressage et de routage des données. Depuis, il revient dans beaucoup d’autres protocoles et projets de recherche industriels, académiques et de standardisation [31, 37–40].
2.1.2
Caractéristiques intrinsèques
Les réseaux véhiculaires mobiles ont les caractéristiques intrinsèques suivantes [3, 5,
34] :
1. Ils sont très dynamiques. En effet, le réseau doit pouvoir gérer des véhicules al-lant de 0 à 160 km/h. Ainsi si deux véhicules sont en sens inverse et qu’ils roulent tous les deux à des vitesses excessives, le temps d’inter-connexion pourra être très court.
2. Leurs environnements sont très variés. L’environnement peut être une route, une autoroute, ou une ville (beaucoup plus complexe). De plus, une situation d’embou-teillage peut mener à l’encombrement du réseau, tandis qu’une route de campagne peut conduire à la disparition des liens du réseau, surtout la nuit.
3. Leur mobilité peut être prédite et modélisée. En effet, la circulation sur une route ou une autoroute est facilement prévisible, car le véhicule doit en général rester sur la route. Connaissant la position actuelle du véhicule et sa vitesse, il est ainsi possible de prédire la position du véhicule, à condition de connaitre la carte de l’environnement.
4. Ils n’ont pas de problème d’énergie ou de stockage. Les équipements du réseau étant installés dans le véhicule, il n’y a pas de problème lié à la durée de vie du réseau. De plus, on peut installer dans les véhicules des systèmes de stockages pour conserver des cartes, ou tout autre type de données susceptibles de servir au fonctionnement du réseau.
2.1.3
Technologies de transmission et de diffusion
Les réseaux véhiculaires mobiles sont en théorie capables d’utiliser un grand nombre de technologies de transmission, dont celles issues des 3e génération (3G) et 4e généra-tion (4G,Long Term Evolution (LTE)) de téléphonie mobile, le Wi-Fi, le WiMax, et le
DSRC/WAVE [33]. Les réseaux mis en place pour les véhicules peuvent utiliser une ou plusieurs de ces technologies. Nous allons décrire les principales technologies ci-dessous en terminant par la plus utilisée dans les VANETs :DSRC/WAVE.
3G et 4G LTE
LesVANETs utilisent les connexions ad-hoc. Afin de pouvoir se connecter au réseau global, et donc à Internet, le réseau cellulaire mobile peut être utilisé. Ce dernier utilise un certain nombre de transmissions, parmi lesquelles : 3G, 4G, LTE. Ces technologies de transmission sont plus ou moins performantes, et leurs débits théoriques dépendent fortement de la mobilité des utilisateurs. Ainsi, puisque les réseaux véhiculaires mobiles sont hautement dynamiques, ces technologies sont peu adaptées. De plus la nécessité d’appartenance au réseau, via une carte SIM, et donc un forfait avec un opérateur, n’est pas intéressante.
Wi-Fi et WiMax
Les technologies Wi-Fi et WiMax, à travers les standards 802.11 et 802.16, peuvent être utilisés dans les VANETs. Un protocole Wi-Fi, 802.11p, a été établi spécialement pour lesVANETs, il est pris en compte par la technologieDSRC. De son côté, WiMax
permet une transmission portant sur une zone géographique étendue. Il reste donc inté-ressant comme moyen de communication entre les véhicules et les infrastructures, afin de permettre un accès à Internet au réseau ad-hoc formé par les véhicules. Cependant
WiMaxn’est pas non plus idéal dans les situations de très grande mobilité. C’est pour-quoi on pourra l’utiliser pour les infrastructures, mais on préfèreraDSRC/WAVE pour les véhicules. Cela peut poser des problèmes de mise en place, les véhicules nécessitant un bloc de réception/transmission capable d’utiliser à la foisDSRC/WAVE etWiMax.
DSRC/WAVE
La technologieDSRC/WAVEest déjà utilisée pour certaines applications liées à l’au-tomobile, tel que le payement électronique des péages sans s’arrêter. Nous allons présen-ter en détail cette technologie. Les communications dédiées à courtes portées, DSRC, ont été créées spécialement pour les réseaux véhiculaires mobiles. Elles regroupent les standards WAVE ainsi que la norme 802.11p, qui est la norme Wi-Fi pour les réseaux véhiculaires mobiles. WAVE regroupe les standards IEEE 1609.x (1,2,3 et 4), qui sont les standards des couches 2, 3, 4 et 7 du modèle Open System Interconnection (OSI).
IEEE 802.11p [32], gère la couche Physique (couche 1) de ce même modèle. Ils sont développés spécialement pour les réseaux véhiculaires mobiles, en fonction des spéci-fications citées ci-dessus (Véhicules rapides, jusqu’à 160 km/h, portés de transmission allant de 300 à 1000 mètres, temps de latence faible [moins de 50 ms], et débit théorique allant jusqu’à 6 Mbps).
Des bandes dédiées ont été allouées par les organismes de certification aux États-Unis et en Europe. Malheureusement, ces bandes ne sont pas compatibles les unes avec les autres. Aux États-Unis, 75 MHz ont été alloués autour des fréquences de 9 GHz, et en Europe, 25 MHz ont été alloués autour de cette même bande. Ces bandes sont représentées sur les figures 2.1 et 2.2. Au Japon, 80 MHz ont été alloués autour de la bande 5,8 GHz.
Figure 2.1 – Bandes allouées pour les VANETs aux États-Unis
Figure 2.2 – Bandes allouées pour les VANETs en Europe
Spécification de bandes en Amérique du Nord.
Aux États-Unis, l’allocation a été attribuée par la Federal Communications Com-mission (FCC). La bande allouée est large de 75 MHz autour de la fréquence 5.9 GHz (5.850 GHz à 5.925 GHz ). Comme on peut le voir sur la Figure 2.1, la largeur des canaux est de 10 MHz, et les débits possibles sur ces canaux vont de 3 à 27 Mbps. Cependant les canaux 174 et 176 ainsi que les canaux 180 et 182 peuvent être utilisés conjointement, afin de former les canaux 175 et 181, et ainsi pouvoir accéder à un débit de données allant jusqu’à 54 Mbps. Le canal de service 172 est en réalité réservé en cas de danger vital (Critical Safety of Life), et le canal 184 est un canal de puissance élevé pour la sécurité publique (High Power Public Safety).
2.1.4
Diffusion de données
Dans les paragraphes précédents, nous avons pu constater l’importance de l’échange d’information entre les différents véhicules, afin de détecter et de prédire les situations hasardeuses. La diffusion de données dans un réseau consiste à envoyer l’information à tous les nœuds qui sont à portée, à la différence d’une transmission qui n’envoie l’information qu’à certains nœuds, sélectionnés à l’avance. Lors de diffusion de données, le paramètre à prendre en compte est la minimisation de la charge du réseau, afin de relier rapidement et de manière fiable les zones ciblées. Ce système est différent du routage de l’information, qui lui concerne la découverte des routes, leurs maintenances ainsi que leurs optimisations.
La diffusion de données rencontre dans lesVANETsplusieurs défis majeurs. En effet, les protocoles et la conception des systèmes desVANETsdoivent être capables de faire face aux problèmes d’évolutivité et de connectivité. Le réseau doit être en mesure de gérer correctement un réseau très chargé, mais aussi de pouvoir maintenir la connectivité lorsque presque aucun véhicule n’est présent. De plus, il doit être capable d’effectuer le passage de l’une de ces situations à l’autre aisément.
Comme on a pu le voir précédemment, il est nécessaire de catégoriser les messages dans le réseau. Ce processus ne permet donc pas de garantir une bande passante pour tous les nœuds du réseau. En cas de nécessité, si cela concerne la sécurité, un nœud peut être déconnecté du réseau. Ces mécanismes sont essentiels pour la sécurité de tous, mais il faut être conscient que sans aucune application de confort, le développement des VANETs ne serait pas possible. Afin d’optimiser la diffusion de données sur le réseau, la gestion de la bande passante doit être elle aussi étudiée. Ce n’est pas toujours raisonnable de réduire l’usage du réseau afin de réserver une certaine bande passante aux messages de sécurité. Pour cela les systèmes se doivent d’être adaptatifs, et le réseau dynamique.
Il existe plusieurs autres leviers sur lesquels on peut jouer afin d’améliorer la diffusion de l’information :
— Adapter la sélection et la transmission des nœuds ;
— Ajuster la puissance de transmission ;
— Prioriser les paquets pendant l’accès au support (Media Access Control (MAC)), en créant des messages de donnés périodiques en cas d’incident, pour informer les nœuds proches de sa vitesse, sa direction, son accélération, etc.
2.2
Contextes d’utilisation
On peut distinguer dans les réseaux véhiculaires mobiles quatre grands types d’uti-lisations : applications de sécurité publique, coordination du trafic automobile, gestion du trafic routier et applications de confort [5]. Cette section va les détailler.
2.2.1
Applications de sécurité publique
Le rôle des applications de sécurité publique est d’améliorer la sécurité routière, en permettant d’éviter les accidents et les morts sur les routes. Ces applications se doivent d’être rapides et fiables. Elles doivent être en mesure de faire suivre l’information à tous les véhicules dans une certaine zone, appelée zone de pertinence ou Zone of Relevance (ZOR). On distingue deux types d’applications : application d’évitement de collisions coopératives, et messages d’avertissement d’urgence.
L’évitement des collisions coopératives a pour but d’éviter les collisions en chaines et les possibilités de collisions en cas de dépassement sur les autoroutes, ainsi que les collisions frontales sur les autres routes. Il est extrêmement nécessaire pour ces applications d’être très rapide (temps de latence devant être inférieur à 100 ms), ce qui n’est pas facile à mettre en œuvre. Idéalement ces applications devraient être capables de prévenir toutes collisions entre véhicules équipés.
Les messages d’avertissement d’urgence peuvent être instantanés ou à long terme. Les messages instantanés disparaissent après leurs diffusions à tous les véhicules présents dans laZOR, tandis que les messages à long terme restent présents dans laZORtant que le danger est présent. Ces messages ont un niveau de priorité moins élevé et nécessitent donc des temps de latence moins courts. Cependant des problèmes apparaissent lorsque laZORest, soit surchargée, soit vide. En effet en cas deZORsurchargé, les messages se perdent, se rencontrent ou encore se bloquent, ce qui mène à une surcharge du réseau. Dans le cas où, aucun véhicule ne transite à travers la ZORet qu’aucune infrastructure n’est à portée, il faut alors être en mesure de prévoir une méthode de maintien du message dans le réseau afin qu’il ne disparaisse pas.
Ces applications devraient être pour la plupart en mesure d’accéder aux commandes et autres capteurs du véhicule afin de les utiliser à des fins de survies. Par exemple, en cas de freinage d’urgence, le temps de réaction du système est plus court que le temps de réaction du chauffeur. La voiture devrait être en mesure de freiner automatiquement. Ces applications sont importantes dans les réseaux véhiculaires mobiles et doivent être mises en place par les développeurs du réseau, mais aussi par les manufacturiers. Elles présentent un fort taux de danger en cas de piratage du réseau, il est donc extrêmement important que ces applications soient hautement sécurisées. Ce point n’est cependant pas abordé dans ce mémoire.
2.2.2
Coordination du trafic automobile
Les applications de coordination du trafic automobile sont les applications d’assis-tances à la conduite. C’est l’analyse de l’environnement qui entoure le véhicule afin d’apporter des informations supplémentaires au conducteur. Par exemple, lorsque le conducteur enclenche un flasheur sur autoroute, le système serait en mesure d’alerter le conducteur en cas de présence d’un autre véhicule sur la voie adjacente.
Malheureusement les études menées dans ce domaine utilisent très rarement les stan-dards des réseaux véhiculaires mobiles, et préfèrent des communications plus spécifiques de très courte portée.
2.2.3
Gestion du trafic routier
Les applications de gestion du trafic routier ont deux objectifs. Le premier est d’ap-porter au conducteur des informations concernant le trafic routier autour de lui ou dans un endroit précis. Ce sont des applications de planification permettant d’emprunter le trajet le plus court vers la destination du véhicule, en prenant en compte le trafic, les différentes routes ainsi que les obstacles ou accidents potentiellement présents sur le trajet. Le principe est le même que pour unGPSavec l’aide des informations, en temps réel, de tout le réseau. Le deuxième objectif est d’apporter une assistance au niveau des intersections. En effet, en milieu urbain, c’est au niveau des intersections qu’il y a le plus d’accidents (que ce soit avec d’autres véhicules ou bien avec des piétons) [41]. Il y a donc beaucoup de recherche effectuée à ce sujet, surtout au niveau de la communication avec les feux de circulation. Ces recherches sont menées dans un premier temps, afin d’avertir le conducteur de l’état du feu lorsqu’il s’en approche, ainsi que de permettre à la voiture de freiner toute seule en cas de négligence de la part du conducteur. Mais
on pourrait aussi imaginer le contrôle des feux par les véhicules d’urgences. C’est une application que l’on retrouve d’ailleurs déjà dans certaines villes [42].
2.2.4
Applications de confort
Les applications de confort sont développées principalement pour divertir les passa-gers, mais aussi à des fins publicitaires et d’information.
Les applications de divertissements permettent et/ou nécessitent un accès Internet. Cet accès peut être effectué à des points stratégiques, comme les stations essences, ou en remontant le réseau jusqu’à un RSU qui serait connecté. En plus de permettre la connexion Internet, il serait possible par exemple de télécharger du contenu payant, comme des jeux, de la musique ou des vidéos à ces points stratégiques et de pouvoir les partager ensuite sur le réseau. C’est donc l’accès à Internet, le partage et la messagerie inter-véhicule ou encore les jeux en réseau ou hors ligne, qui seraient permis sur le réseau.
Les applications publicitaires sont destinées aux commerciaux présents sur les bords des routes. Ainsi, les hôtels, restaurants, stations essences et autres commerces pour-raient annoncer aux véhicules, dans un certain rayon autour de leur commerce, leur présence à proximité. Les utilisateurs pourraient ainsi, lorsque nécessaires, consulter le type de commerce présent autour d’eux et sélectionner celui correspondant à leurs besoins.
Ces applications peuvent aussi être informatives. Par exemple, on trouve des appli-cations de gestion du stationnement, en ville ou dans un stationnement sous-terrain, afin d’informer le conducteur des places disponibles prêt de sa position via les données fournies par un RSU [43]. Ce concept est illustré à la Figure 2.3.
2.3
Déploiement
Afin de pouvoir considérer un réseau véhiculaire mobile complet, il faut que tous les véhicules soient munis d’équipements de réception et de transmission, ainsi que d’équipements de calcul et de positionnementGPS. Dans ce contexte, les constructeurs automobiles développent de plus en plus de véhicules possédant au moins un GPS et un certain nombre de capteurs, tels que des radars de recul, de position, et d’autres technologies d’aide à la conduite. C’est la première étape de la mise en place des réseaux
Figure 2.3 – Aide au stationnement grâce aux VANETs
véhiculaires mobiles. La deuxième étape, qui est déjà en cours de réalisation, est la mise en place du réseau à petite échelle dans plusieurs villes à travers le monde. Ces réseaux sont pour l’instant réservés aux véhicules des services publics (par exemple les voitures de police, de pompier et les transports en commun). Les RSUssont déployés en petite quantité dans des endroits profitables à ce genre de véhicules (comme les arrêts de bus), et certaines applications parallèles voient déjà le jour. Il y a par exemple la vérification du payement de stationnement via les parcomètres qui sont connectés aux réseaux ou encore l’interaction via une application mobile avec les utilisateurs de transports en commun, permettant aux usagers d’obtenir des informations d’horaires ou de retards en temps réel. L’étape ultime est de mettre en place le réseau pour l’ensemble des automobilistes. Cette étape ne peut être réalisée que si les manufacturiers mettent en vente des véhicules équipés, et si les consommateurs acceptent de les acheter.
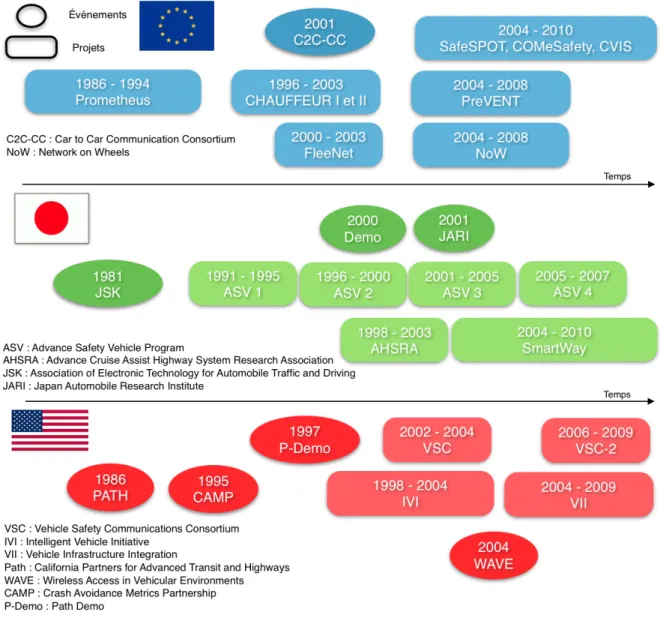
Les pays et les industrielles ont mis en place un certain nombre de projets visant à dé-ployer les réseaux véhiculaires mobiles. Ces projets sont nés rapidement après le début des recherches sur les réseaux véhiculaires mobiles, et ce en Europe, aux États-Unis et au Japon. La Figure 2.4 présente les principaux projets. De plus, plusieurs universités ont déployé des projets à grande échelle. La plupart sont plus des bancs d’essai que de véritables déploiements. On citera principalement le projet UCLA Campus Vehicular Testbed (C-Vet) [44], créé à la University of California, Los Angeles (UCLA), Open-Access Research Testbed for Next-Generation Wireless Networks (ORBIT) [45] à la Rutgers University (New Jersey),Car Telecommunications (CarTel)[46] au Massachu-setts Institute of Technology (MIT), Diesel Net [47] à la University of Massachusetts
(UMASS), ShangaiGrid [48] en collaboration avec la Shanghai Jiao Tong University (SJTU) et le gouvernement de Shanghai, ainsi que Vanet Testbed [49] à l’Université Nationale Chiao-Tung (NCTU) à Taïwan.
Tous ces projets ont l’objectif commun de mettre en place le futur système de trans-port intelligent (Intelligent Transport System (ITS)). En effet, si les réseaux véhiculaires mobiles ont été d’abord conçus pour permettre les communications entre les véhicules, ils seront aussi utiles pour faire la collecte d’information tirée de tous les capteurs, présents ou non dans nos véhicules. C’est le concept de «véhicule intelligent». Cette nouvelle catégorie de véhicules serait équipée de capteurs en tout genre, capable d’ana-lyser, de comprendre et de réagir en fonction de l’environnement qui les entoure. En plus d’apporter des mesures de sécurité (freinage d’urgence automatique ou encore blocage du volant lors d’un changement de file sur autoroute si la file est occupée), ces véhi-cules seront en mesure de récolter des informations de pollution, de météo, et d’autres données en tout genre, afin de les analyser.
Les véhicules sont équipés d’un ou plusieurs transmetteurs. Pour la plupart des pro-jets, les véhicules sont équipés de deux émetteurs, un réservé pour émettre sur le canal de contrôle, ouControl Channel (CCH) en anglais, et le deuxième pour émettre sur les canaux de services, appelés Service Channel (SCH)en anglais. De plus, ils sont équipés d’un ordinateur de bord afin de pouvoir traiter l’information. Sur les bancs d’essai, tous ces équipements sont souvent installés dans le coffre ou à la place du siège passager. Un convertisseur de puissance est la plupart du temps nécessaire afin de pouvoir fournir suffisamment d’énergie aux différents équipements. Les véhicules d’essais ont souvent à leur bord un écran de contrôle. On peut facilement imaginer que l’ordinateur dédié au réseau sera intégré à l’ordinateur de bord, et l’écran de contrôle sera une fonction de l’afficheur de cet ordinateur, à travers une interface personne-machine simple et conviviale.
2.4
Modèle de Mobilité
Dans cette section, nous allons commencer par présenter les environnements pour lesquelles les modèles de mobilité doivent être développés. Nous présenterons ensuite les principaux modèles qui peuvent être séparés en trois groupes : les modèles analytiques, les modèles physiques ainsi que les modèles empiriques et pilotés par les données.
Figure 2.4 – Principaux projets de déploiements et de tests
2.4.1
Environnement de Mobilité :
Les environnements de mobilité se divisent en deux parties : les autoroutes et les villes. Sur les autoroutes, les automobilistes ne peuvent se déplacer que dans deux directions sur plusieurs voies. On peut regrouper les automobilistes et considérer des nœuds entrants et sortants au niveau des intersections. LesRSUsdoivent être puissants et bidirectionnels. Dans les villes, le modèle de mobilité est différent, les véhicules peuvent tourner très souvent, les unités de bords de routes (RSUs) sont beaucoup plus présentes (à condition de considérer un réseau grandement déployé avec desRSUs sur chaque feu de circulation, parcomètres, et autres infrastructures). On peut cependant identifier ici encore des patrons de déplacement, en fonction des heures de la journée
ou encore des statistiques de circulations.
Afin d’être le plus réaliste possible, un modèle de mobilité doit être en mesure de connaitre le nombre de voies de chaque route ainsi que leurs directions. De plus, la vitesse, l’accélération et la décélération des véhicules doivent aussi être considérées en fonction du type de route sur lesquels les véhicules circulent. Ensuite, les modèles de mobilités doivent prendre en compte l’heure de la journée ainsi que la météo, afin de simuler l’état du trafic dans ces conditions. Le modèle de mobilité devrait aussi être capable de prendre en compte les obstacles à la mobilité, mais aussi à la communication sans fil, présents sur le réseau. On pense en premier lieu à l’effet gratte-ciel qui empêche la bonne diffusion du signal GPS dans les grandes villes. Enfin, le modèle ne doit pas se contenter de prendre en considération seulement les véhicules automobiles. En effet, les conducteurs réagissent à l’environnement qui les entoure : en cas d’obstacle sur la route ou de confrontation avec des piétons, par exemple.
2.4.2
Modèles analytiques :
Les modèles analytiques sont divisés en deux groupes, les modèles individuels ainsi que les modèles de groupes.
1. Modèles individuels :
a) Dans le modèle de mobilité Random Waypoint (RWP), les nœuds bougent aléatoirement, n’importe où, sans aucune restriction. La destination, la vi-tesse ainsi que la direction sont choisies aléatoirement, indépendamment pour chaque nœud. Ces choix sont effectués toutes les x secondes, avec x choisi aléatoirement, ou bien lorsqu’un nœud a atteint la destination précédente. Dans ce modèle très simpliste, les nœuds ont tendance à se rassembler ou à passer régulièrement par le centre de la carte. De plus, aucune route ne peut être simulée dans ce modèle. C’est un des modèles les plus simples et facile a implémenter de la littérature.
b) Random Walk (RW)est une version discrète de mouvement Brownien (Mou-vement aléatoire d’une grosse particule dans un fluide). Dans ce modèle on peut placer des frontières sur lesquelles les particules rebondissent, cepen-dant, il subit les mêmes problèmes que RWP.
c) Random Direction Model (RD) est une amélioration du modèle RWP. Ce modèle évite le phénomène de rassemblement/passage par le centre. Dans ce cas la vitesse, direction et destination ne sont pas choisie aléatoirement dans
le temps, ils sont reconfigurés aléatoirement une fois que le nœud a atteint sa destination ou bien lorsqu’il a atteint un des bords de la carte. Le choix de la destination, de la vitesse et de la direction sont choisis ici en fonction du nombre des voisins.
d) Restricted RWPpermet de simuler un modèle un peu plus réaliste. Des zones sont définies, correspondant à des villes. Chaque nœud se déplace alors un nombre de fois aléatoire dans une ville suivant le RW, puis change de ville et recommence.
e) Les modèles basés sur des graphes utilisent des mouvements par contraintes. Le véhicule ne peut se déplacer que selon les arêtes et les bords définis par la carte. Cela permet une bonne simulation des villes, des routes entre les villes, des autoroutes, etc. C’est donc très intéressant pour simuler le réseau routier. De plus dans ce cas, les trajectoires des nœuds se limitent naturellement aux routes fréquemment utilisées. Pour Graph-based, le véhicule choisit le chemin le plus court entre sa position et sa destination, et s’y déplace suivant les contraintes du graphe.
f) Dans le modèle Freeway, la vitesse du nœud dépend du nœud situé devant lui, et ne peut pas être plus grande que cette dernière. Une fois sur une voie, le véhicule ne peut pas en changer. C’est donc un modèle assez limité.
g) Dans le modèle Manhattan les nœuds se déplacent sur une grille et possèdent une probabilité de tourner à droite ou à gauche égale (25 %). Les 50 % restants sont la probabilité de continuer tout droit. Ce modèle subit les mêmes contraintes de vitesses que le modèle Freeway. C’est un modèle très connu de la littérature pour les réseaux véhiculaires mobiles.
h) Dans le modèle Obstacle, les véhicules se déplacent suivant Restricted RWP
dans un graphe défini en fonction des bâtiments présents. Cependant des améliorations sont à apporter à ce modèle afin que les véhicules ne puissent pas se retrouver au milieu d’un bâtiment.
2. Modèles de groupes :
a) Exponentially Corellated créé des mouvements aléatoires en vitesse, desti-nation et direction, non plus individuellement, mais par groupe. C’est un modèle très simpliste.
b) Le modèle Colonne définit une ou plusieurs références parmi les nœuds du réseau. Les autres nœuds du réseau se déplacent alors suivant un modèle
singulier autour de la référence la plus proche. Les références ne se déplacent que vers l’avant, d’où le nom de Colonne.
c) Dans le modèle de Communauté Nomade, les nœuds se déplacent autour d’une seule référence qui se déplace sur la carte suivant un modèle singulier. Le déplacement se fait donc en groupe sur la carte.
d) Le modèle Purse utilise une référence, suivie par le groupe qui essaye de la rattraper à la manière de Policier / Voleur. La référence se déplace là encore suivant un modèle singulier.
e) Reference Point Group Mobility model (RPGM) est la référence la plus in-téressante des modèles de groupes. Une hiérarchie existe au sein des nœuds du réseau. Chaque groupe possède plusieurs références dont une agit comme centre logistique de groupe. Elle contrôle le mouvement de toutes les autres références du groupe. Les autres nœuds se déplacent de manière singulière autour d’une référence. Ce modèle est très utilisé dans la littérature.
2.4.3
Modèles physiques :
Les modèles physiques sont des modèles qui ont été observés dans la réalité et modé-lisés afin de créer un modèle fidèle à la réalité. Ces modèles ont surtout été développés pour les mouvements de populations (piétons). On peut en citer plusieurs : Heterogenous Random Walk, Sociological InteractionMobility for Population Simulation (SIMPS),
Self-Similar Least-Action Walk (SLAW), etc. Par exemple, SIMPS utilise deux modes de déplacement ; le mode sociable, et le mode isolation. En fonction de l’état du nœud, il va être attiré ou repoussé par les autres nœuds à la manière d’un aimant. Ces modèles ne sont pas très intéressants pour les réseaux véhiculaires mobiles, car ils reflètent plus les déplacements des piétons que ceux de véhicules. On peut tout de même noter le Modèle de la colonie de fourmis, qui est un modèle copiant le comportement des fourmis qui cherchent de la nourriture. Ce modèle a été aussi testé pour un protocole de routage [50].
2.4.4
Modèles empiriques et pilotés par les données :
Les modèles énoncés précédemment sont trop simplistes pour permettre aux cher-cheurs de faire des simulations réalistes. Il était cependant important de les présenter car ils sont souvent utilisés comme modèle de base dans les simulateurs existants.
Les modèles les plus utilisés par les chercheurs pour les réseaux véhiculaires mobiles sont les modèles empiriques, créés à partir de jeux de données de déplacement enre-gistrés sur les routes. Il existe plusieurs bases de données qui permettent d’accéder à ce genre de renseignement. Une des plus connues en Amérique du Nord est la base de données Topologically Integrated Geographic Encoding and Referencing (TIGER), entretenue par l’US Census Bureau [51]. Ces données sont extraites du monde réel avec des contraintes graphiques. La littérature propose de plus en plus de simulateurs de mobilité. Cependant le principal problème est qu’ils sont de plus en plus difficiles à utiliser et à configurer du fait de la complexité du problème. En effet, énormément de paramètres sont à prendre en compte si l’on veut pouvoir recréer un modèle suffisam-ment réaliste. Récemsuffisam-ment, un nouveau type de rendu de la mobilité très réaliste est apparu, obtenu à travers leMulti-agent Microscopic Traffic Simulator (MMTS), qui est capable de simuler le trafic public et privé à travers des cartes très réalistes de routes régionales de la Suisse [52, 53].
2.5
Conclusion
Dans ce chapitre, nous avons vu les caractéristiques principales et spécifiques des réseaux véhiculaires mobiles. Nous avons détaillé les technologies de transmissions, les contextes d’applications, et aussi présenté des concepts plus généraux tels que la modé-lisation des communications dans les VANETs ou les concepts de mobilité, qui seront très importants lors des phases de développement et de tests.
Le chapitre suivant va nous présenter une analyse complète du problème de routage de l’information dans les réseaux véhiculaires mobiles.
Chapitre 3
Analyse du problème de routage
Dans ce chapitre, nous effectuons une analyse du problème de routage de l’informa-tion dans les réseaux véhiculaires mobiles (VANETs). Nous allons donc introduire les protocoles de routages que l’on retrouve principalement dans la littérature. Ensuite, afin de préparer le lecteur au Chapitre4, qui présente la mise en œuvre et les résultats, nous allons présenter le principe de fonctionnement du protocole que nous avons utilisé pour notre recherche, et nous analyserons ensuite les paramètres à prendre en compte lors de l’établissement ou l’évaluation d’un protocole de routage : les métriques d’envi-ronnement et de performances ainsi que les modèles de trafic et de propagation. Nous présenterons ensuite une formulation du problème ainsi qu’une analyse des solutions.
3.1
Protocoles de routages dans les VANETs
Afin de présenter les principaux protocoles de routages dans les VANETs, nous avons choisi de commencer par faire une classification des différents protocoles existant dans la littérature. La section suivante présente donc ces différentes méthodes de routages introduisant ainsi les cinq sections suivantes, qui développe les quelques protocoles que nous avons choisi de présenter. En effet, un grand nombre de protocoles de routage existent dans la littérature [26,54–59], nous n’avons donc pas pu tous les retenir. C’est aussi dans ce but que nous avons choisi de commencer par une classification.
3.1.1
Classification
La classification que nous vous présentons est illustrée à la Figure 3.2. Cependant, elle est issue d’une première analyse du routage de l’information, qui est la suivante : le routage de l’information consiste à diriger les messages du nœud source vers le ou les nœuds destinataires, à travers le réseau. Les communications peuvent se faire de deux manières différentes, directement avec un seul saut (single-hop) ou par étape avec plusieurs sauts (multi-hop). Avec un seul saut, la source et la destination sont en fait connectées directement l’un avec l’autre, tandis qu’avec plusieurs sauts, la communica-tion se fait via l’intermédiaire des nœuds posicommunica-tionnés entre la source et la destinacommunica-tion. Chaque fois que le message passe d’un nœud à un autre, il se déplace d’un saut. Lors d’une communication multi-sauts, le chemin est choisi en fonction de divers facteurs tel que sa longueur, sa bande passante, ou encore sa durée de vie. Cela est valable pour n’importe quel type de routage qui seront présentés ci-dessous.
Ensuite, il existe deux classes de protocoles de routage :
1. le routage Proactif : Les nœuds maintiennent en permanence des tables de routage afin de connaitre la topologie du réseau en tout temps ;
2. le routage Réactif : Les nœuds construisent une table de routage seulement lors-qu’un nœud voisin en fait la demande ou qu’il doit démarrer une transmission. Ils ne connaissent donc pas la topologie du réseau lorsqu’ils sont inactifs.
On peut noter que des techniques de type hybrides existent, par exemple, le protocole ZRP (Zone Routing Protocol) [60]. Ce protocole crée des groupes d’utilisateurs. Le routage se fait de façon réactive au sein du groupe, et il se fait de façon proactive entre les différents groupes. Ces classes de protocoles coexistent au sein des différents types de routage, mais nous remarquerons pour les VANETs que c’est le routage réactif qui est le plus utilisé.
Les différents types de routages sont les suivants :
1. le routage Unicast : l’information transite d’un nœud source vers un nœud desti-nataire ;
2. le routage Multicast/Geocast : l’information est transmise d’un nœud source vers plusieurs nœuds destinataires précis (Multicast), ou a tous les destinataires pré-sents dans une zone géographique donnée (Geocast) ;
3. le routage de type Broadcast : L’information du nœud source est envoyée à tous les nœuds présents autour de ce dernier.
La Figure 3.1 résume ces concepts.
(a) Unicast (b) Multicast
(c) Geocast (d) Broadcast
Figure 3.1 – Les différents types de routages
Ainsi, nous avons divisé les différents protocoles de routages dans les VANETs sui-vant les trois grands types de routage, et nous avons distingué aux protocoles unicasts, en fonction des spécificités des réseaux véhiculaires mobiles et des protocoles qui ont été créés pour eux, trois sous-catégories : les protocoles Ad-hoc, les protocoles basés sur la position et les protocoles de groupes. Dans toutes ces catégories de routage, la source a été définie unique vers un ou plusieurs destinataire (one-to-many). Cependant, il est possible dans certains cas qu’un nombre multiple de nœuds sources émettent des paquets de données à plusieurs destinations (many-to-many). Ce type de transmission
est utile pour le téléchargement de données volumineuses, ou par l’utilisation d’appli-cations spécifiques, comme pour la visioconférence par exemple. Les sections suivantes vont présenter un aperçu des principaux protocoles que l’on retrouve dans chacune de ces catégories (cf. Figure3.2).
Figure 3.2 – Classifications des protocoles de routages dans les VANETs.
3.1.2
Protocoles Unicast Ad-hoc et leurs adaptations pour les
VANETs
Dans la littérature, quatre protocoles reviennent de façon récurrente lorsque l’on parle de réseau ad-hoc mobile. Deux sont proactifs, Dynamic destination-Sequenced Distance Vector (DSDV)[61] etOptimized Link State Routing Protocol (OLSR) [62], et les deux autres sont réactifs,Ad-hoc On-Demand Distance Vector Routing (AODV)
[63] et Dynamic Source Routing (DSR) [64]. Nous allons maintenant les décrire.
DSDV : Utilisation de l’algorithme de Bellman-Ford afin de trouver le chemin optimal du nœud source au nœud destinataire. La mise à jour des tables se fait en fonction du temps (de façon périodique grâce à des timers), ou en fonction d’événement (mauvais débit de connexion, délais trop élevés, liens qui disparaissent).
OLSR: Ce protocole définit des nœuds qu’il nomme «multi-relais», seuls ces nœuds pos-sèdent les tables de routage complètes. Cela réduit la diffusion excessive et le gaspillage de la bande passante par rapport au protocoleDSDV.
AODV : Ce protocole a été développé pour les MANETs. Lorsqu’un nœud doit com-mencer une transmission, AODV diffuse un paquet de découverte de façon broadcast. La destination va utiliser le chemin emprunté par le premier paquet de découverte qui
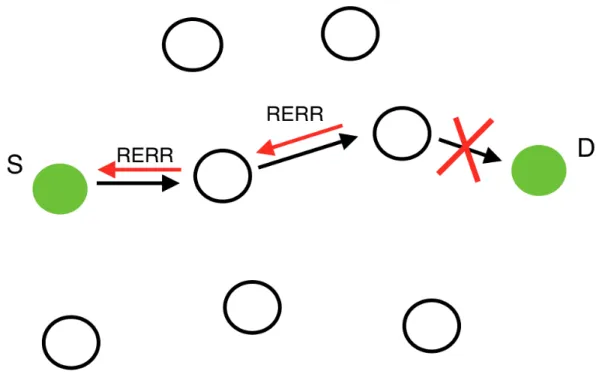
l’a atteint. Il envoie alors un paquet réponse afin d’annoncer ce chemin à la source. L’envoi de données peut alors commencer. En cas de disparition d’un lien sur le chemin choisi, un paquet d’erreur est généré.
DSR: Reprends le principe deDSDV(notamment l’algorithme de Bellman-Ford), mais construis les tables de routages de façon réactive, et se basent sur l’état des liens. En effet, la modification de la table se fait seulement lorsque l’état des liens varie. De plus, il copie l’ID des nœuds traversé dans l’en-tête du message, permettant ainsi au message de retrouver son chemin vers la source. Il peut ainsi choisir des routes alternatives s’il les considère comme meilleures, et possède ainsi une réactivité plus rapide que celle d’AODV en cas de perte de liaison avec un nœud.
Par la suite, les chercheurs ont tenté d’améliorer les performances des protocoles présentés précédemment afin de mieux les adapter aux réseaux véhiculaires mobiles qui présentent des spécificités qui leurs sont propres. En effet, DSDV, OLSR, AODV et
DSR présentent des performances pour les VANETs qui sont assez pauvres. Ainsi, des protocoles tels que Predicted AODV (PR-AODV)et PR-AODVM (M pour maximisé) [7] ont été créés. Ces protocoles sont des modifications du protocole AODV pour les
VANETs. Ils utilisent les informations de localisation ainsi que de vitesse des différents véhicules afin d’évaluer la durée de vie du lien. Cela permet ainsi au réseau de créer une nouvelle route avant la fin de vie du lien, contrairement au protocoleAODVqui attendra que la liaison soit coupée avant de rechercher une nouvelle route. PR-AODVM choisit la route avec la plus grande durée de vie, différemment de PR-AODV qui choisirait de façon plus classique la route la plus courte ou la plus rapide. On constate une nette augmentation des paquets délivrés grâce à ces protocoles, cependant ils sont dépendants de la validité de la prédiction de la durée de vie du lien. Or le réseau est très dynamique, la prédiction n’est donc pas toujours facile à calculer et peut donc être faussée.
3.1.3
Protocoles Unicast de groupe
Le routage par groupe, aussi appelé «Cluster-based Routing» est une technique effi-cace sur les autoroutes. Elle consiste à créer des sous-réseaux virtuels tel que le montre la Figure 3.3 [54]. Chaque groupe élit à sa tête un nœud leader, qui va s’occuper de gérer la coordination et le management de communications inter et intra-groupes. Dans un groupe, les communications ne peuvent être que directes (1-hop).
Figure 3.3 – Cluster-based Routing
Les deux principaux protocoles basés sur les groupes dans lesVANETssontClustering for Open Inter-vehicular communication Networks (COIN) [8] ainsi que le protocole
Location Routing Algorithm with Cluster-Based Flooding (LORA_CBF) [9]. COIN
élit la tête du groupe en fonctions des données de déplacement du véhicule et prends en compte la distance entre les véhicules. Le deuxième,LORA_CBFdéfini, en plus des têtes de groupes, des nœuds ponts. Ces nœuds sont chargés de faire la liaison entre les différents groupes, tandis que le nœud tête ne gère que la distribution du message dans le groupe. Cela permet une augmentation de la mobilité. Cette méthode est adaptée aux grands réseaux, à la différence d’AODV et DSR.
Les protocoles de routage par groupe sont donc souvent de bonne qualité, à une condition ; que le réseau ne soit pas trop dynamique, c’est-à-dire sur autoroute. En effet, en ville, il est difficile de maintenir les différents groupes. Les protocoles d’accueil d’un nouveau membre sont gourmands en coût de gestion du réseau (overhead).
3.1.4
Protocoles Unicast basé sur la position
L’idée de protocole basé sur la position pour lesVANETsvient naturellement lorsque l’on considère leurs spécificités. En effets, les déplacements des véhicules sont limités par les routes et l’environnement. On peut donc sans trop de difficulté effectuer un graphe en deux dimensions en utilisant les données de positionnement des véhicules afin de trouver le meilleur chemin de routage de l’information entre la source et la destination. Dans lesVANETs, la plupart des protocoles utilisent les données de position. Comme on a pu le voir ci-dessus, les protocoles provenant des réseaux ad-hoc sont améliorés en ajoutant les données de positionnement des véhicules. On a donc voulu tirer avantage des spécificités des VANETs en exploitant les coordonnées GPS ainsi que l’utilisation de modèles de mobilités et autres capteurs «on-board». Cette section décrit quelques