Développement d’une méthode d’entraînement de la
poussée plantaire pour une rééducation chez les
personnes ayant une déficience motrice cérébrale
Mémoire
Michaël Bertrand-Charette
Maîtrise en médecine expérimentale
Maître ès sciences
(M. Sc.)
Québec, Canada
Développement d’une méthode d’entraînement de la
poussée plantaire pour une rééducation chez les
personnes ayant une déficience motrice cérébrale
Mémoire
Michaël Bertrand-Charette
Sous la direction de :
Laurent Bouyer, directeur de recherche
Jens Bo Nielsen, codirecteur de recherche
iii
RÉSUMÉ
OBJECTIFS: Chez les patients atteints d’une déficience motrice cérébrale (DMC),
le contrôle de la poussée plantaire est affecté, limitant la marche. Des travaux récents ont démontré que la marche sur tapis roulant avec une résistance appliquée à la cheville au cours de l'oscillation entraîne une modification transitoire du patron de marche (« aftereffects »). Cependant, cette adaptation n’a pu être reproduite pendant la poussée plantaire, un moment clé du cycle de marche pour la réadaptation. L'objectif principal du mémoire était donc de répéter le protocole d’adaptation au sol, pour rendre l’entraînement plus fonctionnel. L'objectif secondaire était de documenter l'effet de cette perturbation unilatérale sur le contrôle locomoteur bilatéral. MÉTHODES: 30 sujets sains ont marché au sol avant, pendant et après l'application d'une résistance élastique à la cheville. Des tubes élastiques (Thera-band Silver) attachés à l'avant d'une orthèse tibiale modifiée ont produit la résistance (1-8 Nm). L'angulation de la cheville, ainsi que l'activité musculaire (EMG) du soléaire ont été enregistrées bilatéralement tout au long du test. RÉSULTATS: Sur le côté entraîné, 27 sujets se sont adaptés à la perturbation et 25 ont présenté des aftereffects (augmentation de l’angle maximal en flexion plantaire 13.4±4.3 à 21.2±6.2°, p<0.0001). 18 participants ont également présenté une augmentation significative (19.5±17.5%, p<0.002) de l’activité EMG du soléaire. Du côté controlatéral, on retrouve uniquement des changements transitoires de petite amplitude, sans aftereffects. CONCLUSION: L’approche utilisée dans ce mémoire offre une méthode simple d‘entraîner de manière spécifique le contrôle de la poussée plantaire et démontre que le patron de marche peut être modifié lors de la poussée plantaire, si testé dans les bonnes conditions. Cet effet est limité à la jambe entraînée, et présente un potentiel de réadaptation important pour la population DMC, qui pourrait bénéficier d’un tel entraînement.
iv
ABSTRACT
OBJECTIVE: People with cerebral palsy have a modified push-off control, limiting
their ability to walk. Recent work has demonstrated that treadmill walking with a resistance applied to the ankle during swing can lead to modifications in ankle dorsiflexor control that persist after resistance removal (“aftereffects”). Initial attempt to replicate this finding during push-off was unsuccessful, maybe because of the different sensorimotor control of the targeted muscle groups and/or the mechanical constraints of walking on a treadmill for push-off adaptation. The primary objective of the present memoir was therefore to see if walking overground would provide a better environment for push-off adaptation. The secondary objective was to document the effect of this unilateral resistance exposure on bilateral locomotor control. METHODS: 30 healthy participants walked overground before, during, and after the application of an elastic resistance at the ankle. Elastic tubing (Thera-band Silver) attached to the front of a modified ankle-foot orthosis delivered the resistance during push-off (1-8 Nm). Ankle angle and Soleus EMG were collected bilaterally throughout the test using wireless recordings. RESULTS: On the resisted side, 27 participants adapted to the force field and 25/30 participants presented aftereffects (increased peak plantarflexion angle from 13.4±4.3 to 21.2±6.2°, p<0.0001). SOL showed significant aftereffects in 18/30 participants (mean EMG increase of 19.5±17.5%, p<0.002). On the non-resisted side, changes were only seen in SOL EMG at the beginning of resistance exposure in some participants while kinematic showed changes at the end of resistance exposure. No significant changes persisted after resistance removal.
CONCLUSION: This memoir shows the feasibility of modifying push-off kinematics
and EMG activation using an elastic resistance applied at the ankle while walking overground. This effect is limited to the trained leg and represents an interesting venue for gait rehabilitation in people with cerebral palsy.
v
TABLE DES MATIÈRES
RÉSUMÉ ... iii
ABSTRACT ... iv
TABLE DES MATIÈRES ... v
LISTE DES FIGURES ... vii
LISTE DES TABLEAUX ... viii
LISTE DES ABRÉVIATIONS ... ix
REMERCIEMENTS ... xi
AVANT-PROPOS ... xii
CHAPITRE 1: INTRODUCTION ... 1
1.1 Introduction générale ... 1
1.2 La marche chez l’humain ... 2
1.2.1 Cycle de marche ... 2 1.2.2 Description de la marche ... 4 1.2.2.1 Paramètres spatiotemporels ... 4 1.2.2.2 Cinématique ... 4 1.2.2.3 Cinétique ... 6 1.2.2.4 Activité électromyographique ... 7
1.2.3 Erreur motrice, adaptation et apprentissage moteur ... 9
1.2.4 Contrôle neural de la marche ... 10
1.2.4.1 Contrôle anticipatoire et réactif ... 12
1.2.4.2 Contrôle réactif positif ... 13
1.2.5 Contrôle de la vitesse de marche ... 13
1.3 La déficience motrice cérébrale ... 14
1.3.1 Définition et classification ... 14
1.3.2 Épidémiologie : Facteurs de risque et prévalence ... 17
1.3.3 Déficiences et limitations associées à la DMC ... 18
1.4 Les modèles de réentraînement de la marche ... 20
vi
1.4.2 Champ de force sur tapis roulant ... 22
1.4.3 Champ de force au sol ... 24
1.5 Rationnel, objectifs et hypothèses de recherche ... 26
1.5.1 Rationnel de recherche ... 26 1.5.2 Objectifs ... 29 1.5.3 Hypothèses ... 29 CHAPITRE 2: MÉTHODOLOGIE ... 30 2.1. Participants ... 30 2.1.1. Critères d’inclusion ... 30 2.1.2. Critères d’exclusion ... 30 2.2. Orthèse ... 31 2.3. Champ de force ... 32 2.4. Procédure ... 33
CHAPITRE 3: LOCOMOTOR ADAPTATION TO PUSH-OFF RESISTANCE DURING OVERGROUND WALKING: IPSI- AND CONTRALATERAL EFFECTS ... 34
3.1. Résumé ... 34
3.2. Article ... 36
CHAPITRE 4: DISCUSSION ... 60
4.1. Effets post-perturbation suivant le retrait de l’élastique ... 60
4.2. Durée de l’effet post-perturbation ... 62
4.3. Effets de l’entraînement sur la jambe controlatérale ... 63
4.4. Forces et limites de l’étude ... 63
4.5. Lien avec la déficience motrice cérébrale ... 65
4.6. Avenues futures ... 65
vii
LISTE DES FIGURES
CHAPITRE 1
Fig. 1.1: Divisions du cycle de marche ... 3
Fig. 1.2: Cinématique à la marche ... 5
Fig. 1.3: Moment de force pour chaque articulation pour une foulée ... 6
Fig. 1.4: Angulation, moment de force et puissance à la cheville ... 7
Fig. 1.5: Patron d'activation EMG des muscles de la jambe à la marche ... 8
Fig. 1.6: Vue schématique du contrôle neural de la marche ... 11
CHAPITRE 2 Fig. 2.1: Orthèse tibiale modifiée. ... 32
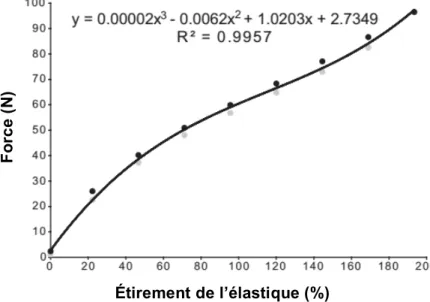
Fig. 2.2: Graphique de la force (N) en fonction du pourcentage d’étirement de l’élastique ... 33
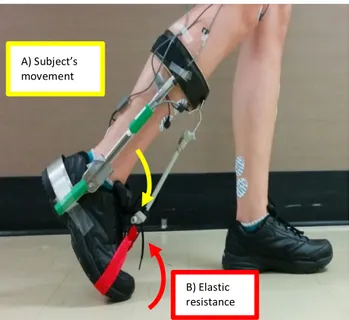
CHAPITRE 3 Fig. 3.1: Picture of the modified AFO with the elastic force field on. ... 54
Fig. 3.2: Effect of the force field on the peak plantarflexion angle. ... 55
Fig. 3.3: Examples of adaptive strategies. ... 56
Fig. 3.4: Continuum of all participants in regard of their strategies. ... 57
viii
LISTE DES TABLEAUX
Chapitre 3
ix
LISTE DES ABRÉVIATIONS
AFO Ankle-foot orthosis
AVC Accident vasculaire cérébrale
CNS Central nervous system
CPG Central pattern generator
DMC Déficience motrice cérébrale
EMG Électromyographie
FNM Fuseau neuromusculaire
GMFCS Gross motor function classification system
Nm Newton-mètre
OTG Organe tendineux de Golgi
SNC Système nerveux central
Sol Soléaire/Soleus
TA Tibial antérieur/Tibialis anterior
x
xi
REMERCIEMENTS
Je voudrais profiter de cet espace pour remercier toutes les personnes qui m’ont épaulé et accompagné tout au long de la réalisation de ma maîtrise. Je voudrais tout d’abord remercier mon directeur de recherche, M. Laurent Bouyer. Depuis mon entrée en physiothérapie, Laurent a su me guider dans mes projets, en plus de me pousser à avoir cette fameuse discussion sur « mon futur », qui se terminait par : « […] ensuite, je vais travailler comme physio », jusqu’au moment où elle s’est terminée par l’acceptation officielle de l’offre d’admission au doctorat. Merci de m’avoir partagé ta passion pour la recherche et au plaisir de travailler ensemble dans ce nouveau projet. Je tiens aussi à remercier le Dr Jens Bo Nielsen, mon codirecteur, pour son implication dans ma formation et sans qui le stage effectué à Copenhague n’aurait pas été possible. Je voudrais par ailleurs remercier Mme Andréanne Blanchette pour son écoute et ses conseils. Ce fut énormément apprécié de pouvoir discuter avec toi durant ces années. De plus, je tiens à remercier mes deux évaluateurs, Mme Véronique Flamand et M. Cyril Duclos, pour avoir accepté de prendre part à l’évaluation de ce mémoire.
Un merci tout particulier à l’équipe du laboratoire. Je pense entre autres à Steve pour son aide avec l’utilisation du Noraxon (et surtout pour son remisage). Un gros merci à Jason pour ses conseils et les opportunités qu’il m’a offertes durant mes études. Je tiens aussi à remercier mes collègues et amis, tout particulièrement Charline, ma coloc du H-0614, Caroline et Sophie, mes collègues du M.Sc.-M.Pht, Anne et Natacha pour leur présence continuelle et j’en passe. Enfin, je ne peux passer sous silence l’importance des différents participants qui ont gentiment donné de leur temps pour participer à mon expérimentation.
Je tiens aussi à remercier la Chaire de recherche en paralysie cérébrale de l’Université Laval, le CIRRIS et le REPAR pour le financement obtenu sous forme de bourse d’étude et de déplacement.
Je voudrais terminer en remerciant mes amis et ma famille pour leur support et leurs encouragements tout au long de mes études, en particulier mes parents pour leur présence et leur patience à toute épreuve.
xii
AVANT-PROPOS
Ce mémoire contient les résultats d’un projet de recherche effectué sous la supervision du Dr Laurent Bouyer et sous la codirection du Dr Jens Bo Nielsen. Le manuscrit de l’article, rédigé en anglais, sera présenté dans le chapitre 3.
Manuscrit (CHAPITRE 3)
Titre: Locomotor adaptation to push-off resistance during overground walking: ipsi-
and contralateral effects.
Auteurs: Michaël Bertrand-Charette1-2, Jens Bo Nielsen3, Laurent J Bouyer1-2
Affiliations:
1Center for Interdisciplinary Research in Rehabilitation and Social Integration
(CIRRIS), Quebec City, Canada
2Faculty of Medicine, Department of Rehabilitation, Laval University, Quebec City,
Canada
3Department of Neuroscience and Pharmacology, University of Copenhagen,
Copenhagen, Denmark
Statut d’auteur de l’étudiant: Auteur principal
Contributions de l’étudiant: Collecte et analyse des données, statistiques,
création des figures et rédaction du manuscrit sous la supervision des coauteurs. Ce manuscrit sera soumis au Journal of Neurophysiology en septembre 2017.
1
CHAPITRE 1: INTRODUCTION
1.1 Introduction générale
La marche est une activité fonctionnelle qui se pratique tous les jours. Que ce soit pour se rendre d’un point à un autre ou dans le cadre d’une activité physique, elle résulte d’une coordination globale du corps, qui implique les différents muscles des jambes, du tronc et des bras, et une intégration complexe des informations sensorielles internes et environnementales. Cependant, cette activité peut être perturbée à la suite d’une atteinte du système nerveux central (SNC) (Beckung & Hagberg, 2002; Chen et al., 2005; Lamontagne et al., 2002; Odding et al., 2006; Sackley et al., 2009), d’une atteinte congénitale ou d’un accident. En effet, plusieurs pathologies peuvent venir troubler l’équilibre des différents systèmes impliqués et ainsi venir nuire au patron locomoteur dit normal. Prenons l’exemple de la déficience motrice cérébrale (DMC) qui, de par sa grande variabilité de patrons cliniques, peut altérer de plusieurs manières la marche des personnes vivant avec cette atteinte. Malgré les efforts déployés en réadaptation, les patients ayant une DMC vont souvent présenter un patron de marche déficient qui va se traduire par des limitations dans leur quotidien (Beckung & Hagberg, 2002; Odding et al., 2006).
L’objectif de ce mémoire est de trouver de nouvelles méthodes pour diminuer l’impact de ces limitations en utilisant une approche fonctionnelle. En se basant sur les protocoles d’adaptation locomotrice développés au cours des 15 dernières années, nous avons étudié la possibilité de réentraîner la poussée plantaire en marchant au sol à l’aide d’un champ de force appliqué à la cheville. Le rationnel derrière cette démarche provient d’une étude effectuée chez des enfants atteints d’une DMC. Cette étude démontre que le retour sensoriel est diminué chez ces jeunes au niveau des fléchisseurs plantaires pendant la marche, ce qui démontre l’importance d’une commande centrale (« central drive ») plus importante (Willerslev-Olsen et al., 2014).
2
Le chapitre 1 de ce mémoire présentera tout d’abord, une description du contrôle de la marche chez l’humain, suivie d’un survol de la déficience motrice cérébrale. Bien que cette population n’ait pas été étudiée directement par le projet présenté dans ce mémoire, ce sont les patients atteints d’une déficience motrice cérébrale qui ont inspiré le protocole expérimental, en lien avec leurs déficiences à la marche, et qui seront visés par les études futures menées pour réadapter leur patron de marche. Enfin, une description des études antérieures menées en adaptation locomotrice sera faite pour finalement conclure ce chapitre avec la problématique, les objectifs de recherche et les hypothèses visés par ce mémoire. L’étude effectuée dans nos laboratoires constituera le cœur de ce mémoire. Le chapitre 2 permettra d’apporter des précisions et des compléments à la méthodologie détaillée présentée dans l’article scientifique. Puis, l’article scientifique sera présenté sous forme de manuscrit dans le chapitre 3. Une discussion et les conclusions générales (chapitre 4) complèteront le mémoire.
1.2 La marche chez l’humain
La marche est une activité fonctionnelle universelle pratiquée par la grande majorité des humains (Bassett et al., 2008; Murray et al., 1964). Cette activité a été décrite à plusieurs reprises comme étant une activité cyclique ayant pour but de propulser le corps vers l’avant et de naviguer dans l’environnement (Patla, 2004; Perry & Burnfield, 2010).
1.2.1 Cycle de marche
Tel que mentionné précédemment, la marche est une activité cyclique. Elle est composée d’une séquence répétée de mouvements faits par les différents membres pour propulser le corps vers l’avant tout en gardant une stabilité posturale dynamique (Perry & Burnfield, 2010). De par cette répétition de mouvements, la marche humaine a été décrite en termes de cycles de marche,
3
une unité qui permet de décrire les différents événements présents durant cette activité fonctionnelle.
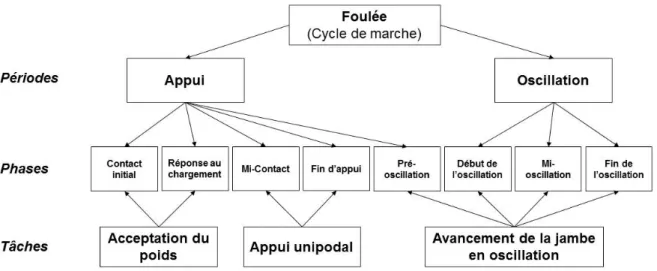
Un cycle de marche est généralement défini comme commençant par le contact du talon d’une des jambes avec le sol et se terminant par le contact suivant du talon de cette même jambe avec le sol. Cela veut donc dire qu’un cycle comporte deux pas. Par ailleurs, il peut être divisé en deux périodes, soit celle d’appui, durant laquelle le pied étudié est en contact avec le sol, et celle d’oscillation, durant laquelle le pied est dans les airs et ramené vers l’avant (Perry & Burnfield, 2010). Normalement, un humain sans atteinte va passer 60% d’un cycle de marche dans sa phase d’appui, contre un 40% en oscillation. Chaque période peut être à son tour divisée en phases : cinq phases pour la période d’appui et trois pour la période d’oscillation. Ces huit phases représentent des événements précis de la marche et peuvent être par la suite regroupées selon leurs objectifs fonctionnels qui permettent d’accomplir trois tâches : l’acceptation
Fig. 1.1: Divisions du cycle de marche. (Adaptation de Perry & Burnfield 2010)
4
du poids, l’appui unipodal et l’avancement de la jambe en oscillation (Fig. 1.1). La poussée plantaire, élément clé de la propulsion du corps vers l’avant, est un événement important de la phase de pré-oscillation et permet, tel que présenté dans les tâches de la marche, l’avancement de la jambe en oscillation.
1.2.2 Description de la marche
Il est également possible de décrire la marche selon des paramètres spatiotemporels, de cinématique, de cinétique et d’activité électromyographique.
1.2.2.1 Paramètres spatiotemporels
Les paramètres spatiotemporels ont été décrits brièvement dans la section sur le cycle de marche. Ils regroupent toutes les variables permettant de décrire en termes de temps et d’espace la marche. Cela peut, entre autres, impliquer la vitesse de marche, la longueur des pas ou sa largeur et le moment du cycle de marche. Si l’on revient sur le cycle de marche normal, un humain sans atteinte va passer 60% du cycle de marche en appui et 40% en oscillation. Ce même 60% en appui peut se diviser en trois sous-périodes. La première est le double appui initial qui compte pour environ 10% du cycle complet. La seconde, comptant pour 40% du cycle de marche, est la phase de simple appui et la troisième et dernière sous-période est le double appui terminal qui représente 10% du cycle de marche.
1.2.2.2 Cinématique
La cinématique peut être présentée comme étant la description du mouvement humain, sans prendre en compte les forces qui causent le mouvement (Winter, 2005). Bien que plusieurs variables puissent être utilisées pour décrire la marche, c’est surtout en lien avec les positions angulaires des différentes articulations dans le plan sagittal que ce terme sera utilisé dans le présent mémoire. Lorsqu’on porte attention à la cinématique des différents segments impliqués dans la marche, on observe une très petite variabilité quant à l’angle
5
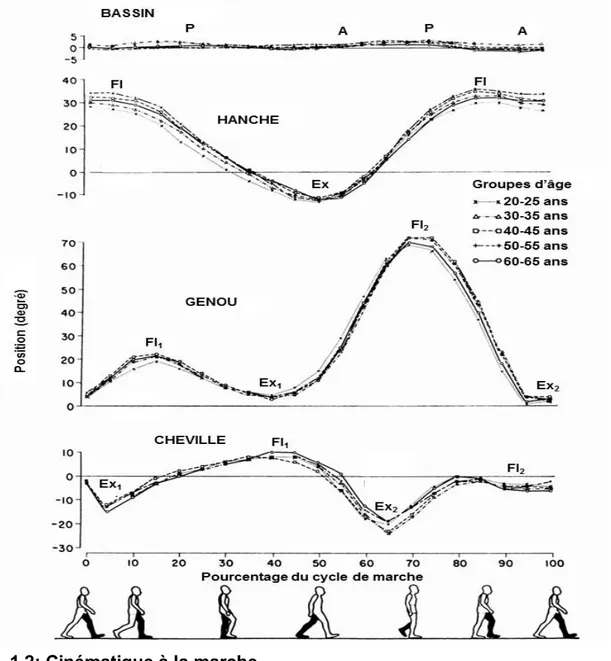
observé aux articulations impliquées chez des sujets sans atteintes (Fig. 1.2) (Kadaba et al., 1989; Winter, 1984). Prenons l’exemple de la cheville, qui est l’articulation principalement visée par le projet de recherche de ce mémoire. Chez un sujet sain, la cheville va couvrir une plage articulaire d’environ 25° (Kadaba et al., 1989; Perry & Burnfield, 2010; Winter, 1984) en oscillant entre la flexion dorsale et plantaire durant toute la durée du cycle de marche.
Fig. 1.2: Cinématique à la marche.
Dans l’ordre de présentation, position en degré des segments du bassin, de la hanche, du genou et de la cheville en fonction du moment du cycle de marche pour les 20-65 ans. (Adaptation de Murray et coll. 1964)
6 1.2.2.3 Cinétique
Tel que mentionné précédemment, la marche peut être décrite en termes de cinétique, terme faisant référence aux forces causant le mouvement et ses résultantes énergétiques (Winter, 2005). Il peut s’agir de la force linéaire, du moment de force ou de la puissance. Encore une fois, tout comme la cinématique, la variabilité dans les forces et moments de force à la marche pour un adulte sain est limitée (Kadaba et al., 1989; Winter, 1984). Lors de la marche, la propulsion du corps vers l’avant est en partie le résultat de la poussée plantaire. Cet événement est le résultat d’une génération importante d’énergie faite par les fléchisseurs plantaires à environ 50% de la foulée. La poussée plantaire est un événement clé de la phase de pré-oscillation et est occasionnée par les muscles gastrocnémiens et soléaire. La figure 1.3 montre les différents moments de forces aux articulations du membre inférieur, alors que la figure 1.4, tirée de Winter 1983 (Winter, 1983) montre l’angulation, le moment de force et la puissance pour la cheville.
Fig. 1.3: Moment de force pour chaque articulation pour une foulée.
Moment de force en Nm pour les articulations de la hanche, du genou et de la cheville. (Adaptation de Winter 1984)
7 1.2.2.4 Activité électromyographique
L’activité électromyographique, ou activité EMG, se définit comme le signal électrique associé à la contraction d’un muscle (Winter, 2005). Une activation précise et bien coordonnée des muscles est nécessaire pour pouvoir accomplir
Fig. 1.4: Angulation, moment de force et puissance à la cheville.
Angulation en degré, moment de force en newton-mètre et puissance en watt pour l’articulation de la cheville pour un même essai de marche. (Adaptation de Winter 1983)
8
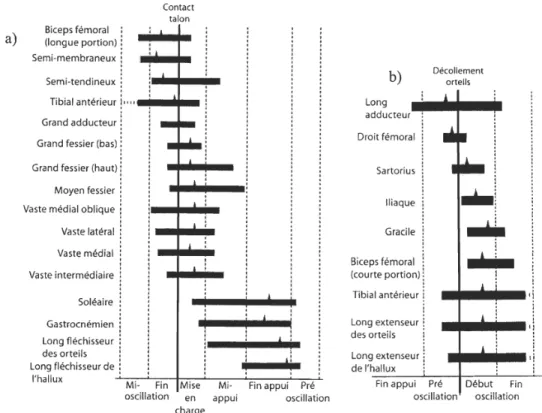
Fig. 1.5: Patron d'activation EMG des muscles de la jambe à la marche. Séquence d’activation des muscles du membre inférieur lors de a) la phase d’appui et de b) la phase d’oscillation (tirée du mémoire de Karine Fortin 2008, adaptée de Perry 1992).
une marche efficace : une absorption des chocs, une stabilité, un dégagement du pied et une propulsion vers l’avant (Perry & Burnfield, 2010). Tout comme les deux derniers paramètres, l’activité EMG est très stéréotypée pour les sujets sains (Kadaba et al., 1989; Kleissen et al., 1997; Winter & Yack, 1987). En effet, lors de la marche les muscles s’activent selon une séquence précise permettant d’effectuer une marche fluide (Fig. 1.5). Cette activité musculaire peut être modifiée en fonction du contexte, par exemple en lien avec une augmentation de poids associée au port d’un objet lourd (ex. sac à dos), une diminution du poids occasionnée par un support corporel, ou tout simplement en changeant la vitesse de marche. (Hof et al., 2002; Ivanenko et al., 2004; Yang & Winter, 1985).
9
1.2.3 Erreur motrice, adaptation et apprentissage moteur
Schmidt et Lee ont défini l’apprentissage moteur comme un ensemble de processus associés avec la pratique ou l’expérience qui mènent à des changements relativement permanents dans la capacité de mouvement (Schmidt & Lee, 2005). En prenant cette définition, il est possible de le diviser en quatre caractéristiques distinctes :
1. L’apprentissage est un processus pour acquérir la capacité de produire une action de manière habile;
2. L’apprentissage se produit suite à la pratique ou l’expérience d’une tâche;
3. L’apprentissage ne peut être observé directement, puisque les processus menant aux changements sont internes;
4. L’apprentissage produit des changements relativement permanents dans la capacité à produire des actions habiles.
Pour entraîner un changement au niveau de la commande motrice, il est possible d’utiliser le principe d’erreur motrice. Cela peut se résumer comme étant une différence entre le mouvement planifié par l’individu et le mouvement « réel » effectué lorsqu’un champ de force est appliqué au segment impliqué. En effet, lorsqu’on effectue une tâche et que la motion prévue du membre change, il en résulte une erreur de mouvement. Ce genre d’erreur permet de mettre à jour le modèle interne (décrit comme une approximation basée sur la dynamique inverse des systèmes contrôlés (Shadmehr & Mussa-Ivaldi, 1994)) et de le modifier pour permettre à la personne d’apprendre un nouveau patron locomoteur et de réduire ainsi les erreurs de mouvement pour cette même tâche suite à une adaptation motrice (Kawato, 1999; Kawato et al., 1987). Ce principe peut être autant utilisé en apprentissage moteur qu’en adaptation motrice.
L’adaptation motrice, quant à elle, a été décrite comme étant un type d’apprentissage dans lequel les commandes motrices sont altérées pour compenser pour les perturbations dans l’environnement externe ou à même le système moteur (Smith et al., 2006). Une différence importante entre apprentissage et adaptation est qu’il est possible « d’effacer » activement la commande motrice obtenue suite à une adaptation motrice en répétant le
10
mouvement sans erreur (Kojima, 2004). L’adaptation motrice peut également être vue comme la phase initiale d’un apprentissage, avant qu’il y ait consolidation.
Ces phénomènes d’adaptation et d’apprentissage moteur sont possibles grâce à l’intégration de plusieurs informations sensorielles et centrales qui dépendent du contrôle neural de la marche, décrit dans la section suivante.
1.2.4 Contrôle neural de la marche
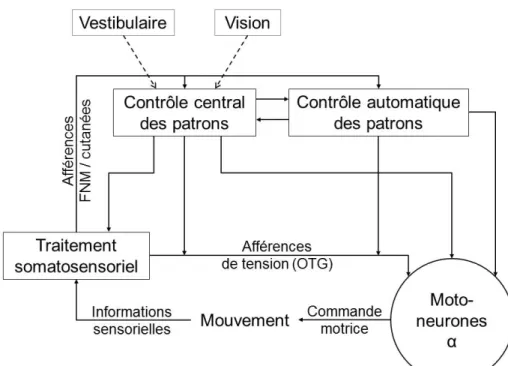
Le contrôle neural de la marche (Fig. 1.6) résulte d’une intégration complexe d’informations de différents niveaux du système nerveux, que ce soit en lien avec le système nerveux central ou périphérique (Grey et al., 2007; Nielsen, 2002, 2003; Nielsen & Sinkjaer, 2002; Yang et al., 1991). Au centre de cette intégration, il a été suggéré qu’au niveau spinal, des générateurs de rythme (central pattern
generator [CPG]) produiraient les mouvements locomoteurs « de base » (Barbeau
& Rossignol, 1987; Grillner & Rossignol, 1978; Grillner & Zangger, 1975; Rossignol et al., 2004; Rossignol et al., 2002; Rossignol et al., 1996). Bien que ces études aient été effectuées sur des modèles animaux, la présence de la marche automatique de type stepping chez les nouveau-nés suggère qu’un système pour la production d’un mouvement rythmique et alterné des membres inférieurs est également présent et développé chez l’homme à la naissance, et ce, avant même le développement complet des influences supraspinales. (Forssberg, 1985; Yang et al., 1998).
Globalement, le contrôle du mouvement est tripartite (Contrôle central, automatique, et sensoriel). En effet, les informations sensorielles issues du mouvement participent également au contrôle neural. Elles peuvent provenir des articulations (Grillner and Rossignol, 1978), des muscles (Dietz and Duysens, 2000; Duysens and Pearson, 1980; Pearson, 1995) ou des récepteurs cutanés (Duysens and Pearson, 1976; Rossignol et al., 1988) et chacune de celles-ci iront influencer différentes composantes du système. Mises ensemble, ces informations
11
permettront un ajustement précis du patron d’activation musculaire, tout en prenant en compte le contrôle de la posture. Malgré toutes ces informations, le contrôle de la marche est très efficace et nécessite peu d’attention de la part de l’individu (Bouyer, 2011).
Dans son ensemble, la locomotion fait interagir deux types de contrôle neural : le contrôle anticipatoire et le contrôle réactif. Ces deux types de contrôle seront décrits plus en détail dans les sections suivantes, mais le contrôle anticipatoire est en quelque sorte une prédiction que le SNC fournit au générateur de patron musculaire, alors que le contrôle réactif utilise les informations sensorielles pour modifier le patron d’activation musculaire. Par ailleurs, les principes de modèle interne et d’adaptation motrice, décrits précédemment, sont liés aux concepts de contrôle anticipatoire et réactif, respectivement.
Fig. 1.6: Vue schématique du contrôle neural de la marche. (Adaptation de Grey et coll. 2012)
12 1.2.4.1 Contrôle anticipatoire et réactif
Le contrôle anticipatoire est une estimation des forces nécessaires pour effectuer un mouvement, alors que le contrôle réactif compense pour les erreurs de l’estimation et stabilise le système pour avoir le mouvement désiré (Shadmehr & Mussa-Ivaldi, 1994). Lors d’un phénomène d’adaptation motrice, ces deux types de contrôles sont impliqués (Lam et al., 2005). En effet, lorsqu’un individu décide d’effectuer un mouvement, le contrôle anticipatoire prédit les forces nécessaires pour produire la commande motrice appropriée (Lackner & Dizio, 1994; Lam et al., 2005; Shadmehr & Mussa-Ivaldi, 1994). Le modèle interne se base sur les propriétés du membre à bouger et de l’environnement, et ce, à partir des expériences antérieures. Cependant, lorsqu’on induit une erreur de mouvement à l’aide d’une force externe, une mise à jour du contexte doit être faite pour produire le mouvement, ce qui représente, en quelque sorte, un modèle interne adapté à la condition du champ de force (Shadmehr & Mussa-Ivaldi, 1994). Les erreurs de mouvement qui sont alors perçues par le corps, via le contrôle réactif, permettent de mettre à jour le modèle initial pour qu’il soit en accord avec la nouvelle condition et ainsi produire le mouvement voulu (Lam et al., 2005; Shadmehr & Mussa-Ivaldi, 1994).
Suite au retrait de la force externe, le modèle interne propre au champ de force est de nouveau erroné, ce qui résulte en des effets post-perturbations. Ces effets sont des erreurs de mouvement qui sont la résultante du processus d’adaptation (Lam et al., 2005; Shadmehr & Mussa-Ivaldi, 1994). Ils sont dus au contrôle anticipatoire associé au modèle interne adapté qui prenait en compte les erreurs de mouvement causées par la force externe. En l’absence de ces forces, le contrôle réactif va permettre au système de s’ajuster à cette condition et permettre le retour graduel du mouvement vers le patron moteur initial, soit celui sans perturbation. Ce genre de paradigme expérimental, appelé adaptation motrice, a souvent été utilisé en recherche et sera discuté plus en détail dans la section Les
13 1.2.4.2 Contrôle réactif positif
Tout comme pour les tâches d’atteinte étudiées par Shadmehr et Mussa-Ivaldi, la marche ne fait pas exception à la règle et implique les deux niveaux de contrôle précédemment nommés : le contrôle prédictif, dit anticipatoire, et celui réactif, qui est en lien avec les informations sensorielles. Dans le cas de la marche, le contrôle réactif peut être subdivisé en deux catégories, soit le contrôle réactif négatif et le positif. Le contrôle réactif négatif a été décrit dans la section précédente. C’est ce processus qui permet de réduire les erreurs de mouvement avec l’aide des récepteurs périphériques (Bouyer, 2011). Donc, dans le cas du contrôle du mouvement, ce type de contrôle nécessite une erreur de mouvement pour être activé.
Dans le cas du contrôle réactif positif, aucune erreur de mouvement n’est nécessaire. Ce type de contrôle permet d’assister la génération de force durant l’exécution normale du mouvement. Par ailleurs, ce dernier varie automatiquement durant un cycle de marche (Bouyer, 2011). Le contrôle réactif positif avait initialement été décrit chez le chat (Gossard et al., 1994), pour ensuite être étudié chez l’humain (Grey et al., 2007; Nielsen, 2003; Nielsen & Sinkjaer, 2002; Sinkjaer et al., 2000). Il serait d’ailleurs d’une importance majeure à la marche durant la phase d’appui chez l’humain (Sinkjaer et al., 2000).
1.2.5 Contrôle de la vitesse de marche
Un autre aspect important du contrôle de la marche est celui associé à la vitesse de marche. Si on se réfère au cycle de marche décrit dans ce chapitre, il avait été établi qu’il y avait deux périodes, soit l’appui et l’oscillation, et que ces périodes pouvaient être divisées en 8 phases (Perry & Burnfield, 2010). Une de ces phases, celle de pré-oscillation, est la toute dernière de la période d’appui et se produit de 50% à 62% du cycle de marche. Les fonctions principales de cette phase sont l’initiation de la flexion du genou pour l’oscillation et la propulsion (Perry
14
& Burnfield, 2010). Les actions de la cheville seraient reliées à la progression plutôt qu’au support du poids.
Plusieurs études ont été menées pour comprendre les facteurs influençant la vitesse de marche, et ce, chez plusieurs populations (Bendall et al., 1989; Bohannon, 1986, 1997; Bohannon et al., 1996; Buchner et al., 1996; Kim & Eng, 2003; Mueller et al., 1995; Nadeau et al., 1999; Suzuki et al., 2001). En général, il a été démontré que la force des membres inférieurs influence grandement la vitesse de marche. Plus particulièrement, certains auteurs se sont intéressés spécifiquement à l’articulation de la cheville et ont démontré que la force des muscles du mollet, les gastrocnémiens et le soléaire, ou que des paramètres de la cinétique, tels que le torque ou le moment de force, seraient associés à la vitesse de marche (Bendall et al., 1989; Bohannon, 1986; Kim & Eng, 2003; Mueller et al., 1995; Nadeau et al., 1999; Suzuki et al., 2001). La poussée plantaire a donc une importance capitale pour la vitesse de marche.
1.3 La déficience motrice cérébrale
Maintenant que les principes et définitions de base de la marche humaine ont été décrits, une présentation sommaire de la déficience motrice cérébrale sera faite. Comme mentionné au tout début de ce mémoire, cette population n’a pas été directement étudiée dans le cadre du projet présenté dans ce mémoire, mais c’est cette dernière qui est visée par les études futures en lien avec les limitations présentes chez cette clientèle.
1.3.1 Définition et classification
La déficience motrice cérébrale, autrefois connue sous le nom de paralysie cérébrale, a été rapportée par Little dès 1861 (Rosenbaum et al., 2007). Depuis, plusieurs définitions ont été proposées pour décrire cette atteinte. Une des définitions qui fut largement acceptée par la communauté scientifique fut celle de
15
Martin Bax en 1964 qui a décrit la DMC comme étant un «Trouble du mouvement
et de la posture dû à un défaut ou une lésion du cerveau immature» [traduction
libre] (Bax, 1964). Déjà à ce moment, toutes atteintes de courte durée, résultant d’une atteinte progressive ou due seulement à une déficience intellectuelle n’étaient pas incluses dans la grande catégorie des DMC.
En 1992, Mutch proposa une nouvelle définition pour clarifier le concept de paralysie cérébrale : « Un terme générique couvrant un groupe d’atteintes motrices non progressives, mais souvent changeantes, secondaires à des lésions ou anomalies cérébrales apparues dans les premiers stades de développement. » [traduction libre] (Mutch et al., 1992)
Finalement, en 2006, une nouvelle définition qui est maintenant largement reconnue dans le domaine fut proposée à la suite d’une rencontre d’un groupe d’expert s’étant rassemblé en 2004. Cette mise à jour de la définition tient compte des récentes avancées en regard de la physiologie et de la pathologie associées avec le développement du cerveau (Rosenbaum et al., 2007). Depuis, la déficience motrice cérébrale se définit comme :
Un ensemble de troubles permanents du développement des mouvements et de la posture menant à des limitations d’activités attribuables à des perturbations non évolutives survenues dans le cerveau du fœtus ou du nourrisson. Les troubles moteurs liés à la paralysie cérébrale sont souvent accompagnés de troubles aux niveaux sensoriel, cognitif, perceptuel ainsi qu’au niveau de la communication et du comportement. La paralysie cérébrale peut aussi s’accompagner d’épilepsie ainsi que de problèmes musculosquelettiques secondaires [traduction libre] (Rosenbaum et al., 2007).
C’est d’ailleurs cette définition qui est encore largement utilisée aujourd’hui qu’il soit question de DMC ou de paralysie cérébrale.
Rosenbaum et collègues se sont aussi attardés à la question de classification de la DMC. Selon ce regroupement, le but de la classification serait
16
de permettre une description de l’individu atteint, de fournir une prédiction des besoins futurs, de permettre les comparaisons entre les cas et de comparer le changement au sein d’un même individu. Ils ont établi quatre composantes de la classification de la DMC : 1) troubles de motricité, 2) déficiences concomitantes, 3) signes anatomiques et évidences obtenues par la neuro-imagerie et 4) causes et facteurs temps (Rosenbaum et al., 2007).
En lien avec le premier élément, les troubles de motricité, plusieurs outils de classification furent développés, dont un principalement utilisé en réadaptation. Le Gross Motor Function Classification System (GMFCS), initialement introduit en 1997 par Palisano et collaborateurs, est un outil de classification fidèle, valide et qui permet de prédire le niveau maximal de fonction motrice grossière d’un enfant atteint d’une DMC (Gorter et al., 2004; Palisano et al., 1997; Palisano et al., 2008; Wood & Rosenbaum, 2000). Le GMFCS est un système de classement divisé en 5 niveaux qui a été développé pour fournir une méthode de classement simple pour les enfants atteints d’une DMC se basant sur leurs habiletés fonctionnelles et leurs limitations (Palisano et al., 2008). Les différences entre les niveaux reposent sur les difficultés fonctionnelles, le besoin de technologies d’appoint (dont les aides à la marche et à la mobilité) et sur la qualité du mouvement. Ce dernier point n’est cependant pas celui sur lequel l’emphase doit être mise. La distinction entre les différents niveaux représente des différences dans les fonctions motrices grossières qui seraient cliniquement significatives pour les activités de la vie quotidienne des enfants atteints. Le niveau I représente un niveau de fonction élevé tandis que le niveau V est associé à un enfant totalement dépendant au niveau de ses activités quotidiennes et domestiques. Cette échelle de classement est disponible pour 5 groupes d’âge soit : 0-2 ans, 2-4 ans, 4-6 ans, 6-12 ans et 12-18 ans (Palisano et al., 1997; Palisano et al., 2008). Plus récemment, une revue narrative a fait ressortir l’importance que le GMFCS occupe dans le domaine de la DMC en indiquant même qu’il risque d’être utilisé davantage dans les prochaines années (Gray et al., 2010).
17
D’autres méthodes de classification ont été proposées, par exemple associées au niveau de sévérité de la DMC ou à la topographie de la condition. En lien avec ce dernier point, la Surveillance of Cerebral Palsy in Europe a développé un arbre décisionnel pour l’inclusion ou l’exclusion des cas de DMC dans leur registre. Cet arbre a été publié dans un article par Cans en 2000 (Cans, 2000). Cependant, tel que stipulé précédemment, le GMFCS reste un outil largement utilisé par les professionnels impliqués en DMC.
1.3.2 Épidémiologie : Facteurs de risque et prévalence
Plusieurs facteurs de risque ont été identifiés au cours des années pour déterminer les causes de la DMC. Ils peuvent être présents à trois étapes du développement, soit anténatal, périnatal et postnatal. Premièrement, certains auteurs ont établi qu’une DMC pourrait être secondaire à une malformation congénitale du cerveau (Reddihough & Collins, 2003) ou aussi secondaire à un événement vasculaire (Reddihough & Collins, 2003; Shevell et al., 2003). Par ailleurs, plusieurs cas d’infections, comme une infection urinaire, chez la mère de l’enfant durant la grossesse, pourraient avoir un impact sur le risque qu’un enfant soit atteint d’une DMC (Bangash et al., 2014; Bax et al., 2006; Odding et al., 2006; Reddihough & Collins, 2003). Les grossesses multiples semblent aussi associées à une prévalence plus élevée de DMC, tout comme un faible poids à la naissance ou la naissance d’un enfant prématuré (Bax et al., 2006; Odding et al., 2006; Reddihough & Collins, 2003). Enfin, une autre atteinte, soit la leukomalacie périventriculaire semble fortement associée à la présence d’une DMC chez les enfants (Odding et al., 2006; Shevell et al., 2003). Shevell et collaborateurs ont montré que, pour 24,9% des enfants atteints recrutés pour leur étude, la leukomalacie périventriculaire était en cause (Shevell et al., 2003). D’autres événements peuvent aussi être en cause, dont un accouchement assisté, une asphyxie périnatale ou des convulsions néonatales (Bax et al., 2006; Reddihough & Collins, 2003).
18
En ce qui a trait à la prévalence de la déficience motrice cérébrale, certains auteurs ont rapporté une prévalence mondiale supérieure à 2,0 par 1000 naissances (Odding et al., 2006; Oskoui et al., 2013a; Oskoui et al., 2013b). En se concentrant sur une revue systématique de 2013, la prévalence au niveau mondial serait de 2,11 par 1000 naissances. Cette même étude s’est intéressée à la prévalence en lien avec le poids à la naissance qui, comme mentionné précédemment, est un des facteurs de risque lié à la DMC. La prévalence chez les bébés pesant entre 1000 et 1499 grammes serait de 59,18 par 1000 naissances, alors qu’elle diminuerait à 1,33 par 1000 naissances pour ceux ayant un poids à la naissance supérieur à 2500 grammes (Oskoui et al., 2013a). Les mêmes auteurs se sont aussi penchés sur la prévalence dans la province de Québec. Les auteurs concluent que la prévalence au niveau de la province serait de 2,30 par 1000 naissances (Oskoui et al., 2013b), ce qui est en accord avec les résultats obtenus au niveau mondial.
1.3.3 Déficiences et limitations associées à la DMC
De par la grande variabilité d’atteintes et de présentations cliniques, la déficience motrice cérébrale peut toucher plusieurs aspects de la santé d’une personne. En effet, il est possible de retrouver des atteintes cognitives, sensorielles et motrices chez les personnes vivant avec une DMC. Tout d’abord, au niveau cognitif, une grande proportion de personnes ayant une DMC ont une quelconque atteinte cognitive. Cette atteinte varie en fonction du type de DMC et sera négativement influencée par la présence d’épilepsie chez le patient (Odding et al., 2006). De plus, selon Odding et collaborateurs, les problèmes comportementaux sont 5 fois plus présents chez les enfants atteints d’une DMC et la présence d’un trouble déficitaire de l’attention avec hyperactivité (TDAH) serait elle aussi plus fréquente chez ces jeunes.
De plus, en regard des atteintes sensorielles, 44 à 51% des enfants atteints d’une DMC auraient une diminution de la discrimination entre deux points et une
19
difficulté à identifier les caractéristiques d’un objet à l’aide du toucher (stéréognosie). Par ailleurs, 28% des adultes ayant une DMC seraient aux prises avec des douleurs chroniques (Odding et al., 2006).
Outre ces déficiences, il est aussi possible de retrouver des atteintes en lien avec la parole, la vision, la nutrition et l’incontinence (Odding et al., 2006; Sullivan et al., 2000).
Enfin, pour ce qui est des atteintes motrices, on retrouve encore une grande variabilité au sein de la population ayant une DMC. Si on se réfère à la classification de Cans en 2000, il est possible de retrouver de la spasticité, de la dyskinésie ou de l’ataxie chez les personnes atteintes (Cans, 2000). Par contre, en regardant plus spécifiquement au niveau des limitations à la marche, les atteintes primaires, celles directement liées aux dommages du SNC, peuvent produire : 1) une perte de contrôle musculaire, 2) une dépendance aux patrons de réflexes primitifs pour la locomotion, 3) un tonus musculaire anormal, 4) un déséquilibre entre les agonistes et les antagonistes, et 5) des réactions d’équilibre déficientes (Gage & Novacheck, 2001). Cela peut se traduire par des patrons de marche déficients qui peuvent prendre plusieurs formes. Les problèmes de marche les plus fréquemment observés dans la population ayant une DMC sont : une raideur au genou durant l’oscillation (80%), une démarche accroupie (69%), une flexion de hanche excessive (65%), une rotation interne de la jambe (64%) et une marche sur la pointe du pied, ou pied équin (61%) (Wren et al. 2005). De plus, chez la population DMC, la consommation d’oxygène tend à être plus élevée que les enfants sans atteinte (Duffy et al, 1996) et ceux-ci ont une vitesse de marche inférieure à la moyenne (Duffy et al., 1996; Pirpiris et al., 2003). En lien avec cette vitesse de marche diminuée, les enfants avec une DMC ont tendance à avoir une diminution de leur capacité à générer de l’énergie pour effectuer la poussée plantaire (Rose et al., 1993). Bref, plusieurs des atteintes mentionnées précédemment peuvent limiter la poussée plantaire et ainsi limiter la capacité de
20
l’enfant atteint d’une DMC de se propulser de manière adéquate lors de son cycle de marche.
1.4 Les modèles de réentraînement de la marche
Tel que mentionné plus haut, les patients atteints d’une DMC présentent plusieurs limitations à la marche. Ces limitations peuvent nuire à l’indépendance fonctionnelle des personnes atteintes d’une DMC et c’est pourquoi plusieurs recherches ont été menées sur l’apprentissage locomoteur à la cheville pour tenter de contrer les atteintes affectant la marche. Ces recherches ne se limitent pas qu’à la DMC, mais bien à toutes les populations présentant un patron locomoteur déficient. Différentes conditions et différents protocoles ont été testés pour évaluer le potentiel des paradigmes expérimentaux à favoriser la réadaptation des patients ayant des atteintes neurologiques. Ce sont justement les différents modèles de réentrainement de la marche qui seront présentés dans les prochaines sections.
1.4.1 Champs de force
L’adaptation locomotrice est une approche de plus en plus étudiée en recherche pour tenter de corriger un patron de marche déficient chez des clientèles ayant une altération de leur patron de marche secondaire à un trouble neurologique. Les protocoles actuels utilisent différentes stratégies en vue d’optimiser les techniques de réadaptation, par exemple en utilisant des tapis roulants à courroies séparées, des supports de poids ou des champs de force à différentes articulations. En lien avec ce dernier point, l’utilisation d’un champ de force permet de modifier temporairement le patron locomoteur en produisant des erreurs de mouvement « prévisibles ». Cette approche implique une manipulation expérimentale de l’environnement de force dans lequel les mouvements sont effectués (Bouyer, 2011). Cette modification peut être créée à l’aide d’une orthèse robotisée (Blanchette et al., 2014; Blanchette et al., 2011; Fortin et al., 2009; Noel et al., 2009), par des câbles tendus par un robot (Yen et al., 2013; Yen et al., 2012;
21
Yen et al., 2015) ou même par une résistance élastique (Blanchette & Bouyer, 2009; Blanchette et al., 2012).
L’ajout d’un champ de force lors d’une tâche de locomotion va créer une erreur de mouvement dans la direction de la force appliquée. En lien avec la description faite dans la section sur le contrôle anticipatoire et réactif (1.2.3.2), la prédiction faite par le modèle interne pour effectuer le mouvement sera initialement faussée par l’ajout de la force et le sujet devrait normalement s’adapter en mettant à jour son modèle interne. Donc, l’utilisation de champs de force a le potentiel de permettre d’entraîner le contrôle anticipatoire du mouvement (Bouyer, 2011; Patton & Mussa-Ivaldi, 2004).
L’utilisation de champ de force permet de créer une adaptation temporaire qui diminue suite au retrait de la force pour revenir au patron locomoteur initial. Certains auteurs ont cependant émis l’hypothèse qu’il serait possible de transformer cette adaptation en apprentissage locomoteur, c’est-à-dire d’emmagasiner le patron locomoteur adapté pour avoir des modifications à plus long terme (Bastian, 2008; Blanchette et al., 2012; Reisman et al., 2010). Le fait d’être exposé à plusieurs reprises à une même condition de champ de force pourrait conduire à l’apprentissage de ce même patron pour cette condition. Il serait alors emmagasiné de manière indépendante et pourrait être rappelé dès l’exposition initiale au champ de force. Suite au retrait, le sujet retournerait à son patron de base sans présenter d’effets post-perturbations (Bastian, 2008; Reisman et al., 2010). Ce phénomène d’apprentissage locomoteur a déjà été documenté dans plusieurs expériences (Blanchette et al., 2012; Fortin et al., 2009; Gordon & Ferris, 2007; Malone et al., 2011; Roemmich & Bastian, 2015) et pourrait présenter un intérêt pour la réadaptation.
22 1.4.2 Champ de force sur tapis roulant
La majorité des études en contrôle locomoteur ont été réalisées sur tapis roulant. Ces études visaient principalement à limiter les problèmes de marche qu’on retrouve chez les populations ayant une atteinte neurologique ou à documenter les effets d’adaptation et d’apprentissage locomoteur. Tout d’abord, un type de tapis roulant utilisé est celui à double courroie (Hoogkamer et al., 2015; Reisman et al., 2013; Reisman et al., 2009). Ce genre de tapis permet de contrôler indépendamment les deux courroies et donc de choisir une vitesse spécifique pour chaque jambe. Il est donc possible d’améliorer ou d’empirer l’asymétrie de la marche de chaque sujet. Par exemple, dans l’expérience de Reisman et collaborateurs en 2013, des sujets post-accident vasculaire cérébral (post-AVC) devaient marcher sur un tapis roulant à double courroie. La vitesse de chaque courroie était choisie de manière à ce que l’asymétrie présente initialement dans le patron locomoteur de base de chaque participant soit exagérée. Suite au paradigme expérimental, les sujets présentaient une amélioration de leur asymétrie (Reisman et al., 2013).
D’autres études ont été faites à l’aide de tapis roulants conventionnels. Dans ces études d’autres paramètres étaient alors modifiés. Par exemple, il est possible de faire marcher les sujets avec un harnais pour supporter une partie du poids corporel du sujet (Chen et al., 2005; Mehrholz et al., 2014; Nilsson et al., 2001). La revue systématique de Mehrholz en 2014 s’est justement intéressée à cette approche, toujours chez les patients post-AVC. Chez cette population, l’entraînement sur tapis roulant avec ou sans support de poids n’améliorerait pas leur habileté à marcher indépendamment, lorsque comparé à des sujets post-AVC qui n’auraient pas reçu d’entraînement sur tapis roulant. Cependant, pour cette clientèle, l’endurance à la marche et la vitesse de marche pourraient être augmentées. Plus proche de la clientèle visée par ce mémoire, ce même type d’approche a été utilisé avec une clientèle atteinte d’une DMC (Chrysagis et al., 2012; Provost et al., 2007; Schindl et al., 2000). Une revue systématique publiée par Mutlu et collaborateurs en 2009 concluait cependant que le petit nombre de
23
participants dans les études, l’hétérogénéité des niveaux de GMFCS des participants et la faible qualité des essais ne permettaient pas de conclure que le support de poids partiel permettrait d’améliorer la performance des enfants atteints d’une DMC (Mutlu et al., 2009).
Une autre approche possible avec les tapis roulants traditionnels est l’utilisation de robots, sous différentes formes, pour créer un champ de force assistant le mouvement ou le résistant (Blanchette et al., 2014; Blanchette et al., 2011; Cain et al., 2007; Ferris et al., 2006; Gordon et al., 2013; Noel et al., 2009; Sawicki et al., 2006; Wu et al., 2014; Wu et al., 2012; Yen et al., 2012; Yen et al., 2015). Prenons l’exemple d’une orthèse électro-hydraulique qui permet de créer un champ de force résistif à la cheville. Cette orthèse peut suivre le mouvement de la cheville de manière très fluide et résister le mouvement voulu à un moment précis du cycle de marche. Ce genre d’approche en résistance s’est montré efficace pour étudier l’adaptation à la cheville chez les sujets sains durant des phases précises du cycle de marche, soit la phase de mi-appui (Noel et al., 2009) et la phase d’oscillation (Blanchette et al., 2011). De plus, elle a été utilisée avec des sujets post-AVC pour qui, après une séance d’adaptation locomotrice avec l’orthèse, l’amplitude moyenne dans l’activation du muscle tibial antérieur a été augmentée (Blanchette et al., 2014).
Enfin, l’utilisation d’un élastique est une autre approche viable pour étudier sur tapis roulant l’adaptation locomotrice à la marche. Cette approche a le mérite d’être peu coûteuse puisqu’elle ne nécessite que l’achat d’un élastique. Cet élastique peut être attaché au tapis roulant et relié au pied pour créer une résistance élastique tout au long du cycle de marche (Blanchette & Bouyer, 2009; Blanchette et al., 2012; Fortin et al., 2009). Une fois de plus, cette approche a permis, toujours avec une approche en résistance, de modifier le patron locomoteur de sujets sains pour montrer une modification du contrôle anticipatoire suite au retrait de l’élastique. Par ailleurs, il a même été suggéré qu’il était aussi possible avec cette approche de réaliser un paradigme d’apprentissage
24
locomoteur à la marche pour obtenir des résultats plus permanents (Blanchette et al., 2012).
1.4.3 Champ de force au sol
Bien que ces expériences se soient montrées prometteuses pour la réadaptation, il reste que celles-ci ont été effectuées sur un tapis roulant, ce qui ne représente pas totalement la réalité du patient. En effet, lors de la marche sur un tapis roulant, il n’y a pas le flux optique normalement présent lors de la marche au sol (Zadra & Proffitt, 2016). De plus, la biomécanique du corps lors de la marche sur tapis n’est pas exactement la même que celle au sol (Lee & Hidler, 2008). Voilà pourquoi des chercheurs se sont intéressés au transfert au sol des effets post-perturbations, gage d’une adaptation locomotrice « fonctionnelle », suite à un entraînement locomoteur sur tapis (Reisman et al., 2009; Yen et al., 2012).
Dans l’expérience de Reisman et collaborateurs, 11 sujets post-AVC et 11 sujets sains ont marché au sol avant et après une séance de marche sur un tapis à double courroie. Chez les deux groupes, ils ont observé un transfert partiel au sol de l’effet post-perturbation, un effet qui est plus grand pour les sujets post-AVC (Reisman et al., 2009). Ils ont émis plusieurs hypothèses quant à ces résultats, dont un déficit au niveau du changement de contexte chez les patients ayant subi un AVC. Ils ont aussi proposé qu’une fois au sol, le nouveau patron serait perçu comme une amélioration au patron de marche de base. Ce plus grand transfert au sol de l’effet d’adaptation serait donc présent, plus que chez les sujets sains, puisqu’il est bénéfique au système en termes de coût énergétique, d’équilibre ou d’efficacité. Ce groupe conclut que pour optimiser les améliorations en lien avec la marche suite à un AVC, une réadaptation idéale inclurait des interventions directement au sol.
Pour ce qui est de l’expérience de Yen et collaborateurs, leurs expérimentations ont été effectuées chez des sujets ayant une lésion incomplète
25
au niveau de la moelle épinière. Ils ont étudié, chez cette population, la capacité de transfert au sol suite à un entraînement aidant le mouvement et suite à un second en résistance (Yen et al., 2012). Ils ont observé que, suite à un entraînement qui assiste le mouvement, la longueur de la foulée diminuait suite au retrait du champ de force en assistance, et que l’effet post-perturbation ne transférait pas au sol. Au contraire, l’entraînement en résistance permettait d’augmenter la longueur de la foulée et cet effet était transféré à la marche au sol. Ils en ont conclu que les personnes ayant une lésion partielle de la moelle épinière bénéficieraient plus d’un programme de réadaptation à la marche lorsque cet entraînement est effectué en résistance. Ceci pourrait être expliqué par le fait que l’implication active demandée pour résister le champ de force pourrait faciliter le transfert de l’adaptation motrice.
Cette idée de transfert de l’effet post-perturbation au sol suite à un entraînement en résistance sur tapis roulant était d’ailleurs le thème du projet pilote effectué lors du Stage d’initiation à la recherche 1 (Bertrand-Charette & Bouyer, 2012). Ce projet pilote visait principalement à modifier l’activité du muscle tibial antérieur (TA), un muscle souvent atteint lors des problèmes de pieds tombants. Le but était simple : les sujets marchaient sur un tapis roulant avec une orthèse tibiale modifiée sur laquelle un élastique de marque Thera-Band était accroché pour créer un champ de force résistant la flexion dorsale, mouvement effectué par le tibial antérieur. Comme dans les expériences décrites précédemment, les sujets ont présenté une adaptation au champ de force lors de la marche sur tapis roulant. Une fois rendu au sol, 2 sujets sur 3 ont présenté un effet post-perturbation, soit une augmentation de l’activité musculaire du muscle TA associée à un angle accru de la flexion dorsale lors de la marche au sol. La taille de l’effet variait entre les sujets et cette modification était temporaire, ce qui est en accord avec le phénomène d’adaptation locomotrice.
Suite à ces résultats, un second projet pilote fut effectué pour évaluer la capacité de sujets sains à s’adapter à un champ de force lorsque l’entraînement est effectué uniquement au sol (Bertrand-Charette & Bouyer, 2013). Toujours en
26
vue de modifier le recrutement du muscle TA, les sujets devaient marcher dans un corridor avec l’orthèse tibiale modifiée utilisée lors du stage 1. À la suite de l’entraînement, tous les sujets ont présenté le même genre d’adaptation que les sujets effectuant un entraînement sur tapis roulant. Ceci s’est traduit par une augmentation de l’activité EMG du muscle TA chez tous les sujets, associée à une augmentation de la dorsiflexion à la cheville chez 2 sujets sur 3. Les résultats de cette étude pilote suggèrent donc qu’un entraînement locomoteur effectué entièrement au sol pourrait mener à une adaptation locomotrice chez des sujets sains.
1.5 Rationnel, objectifs et hypothèses de recherche
Maintenant que les bases ont été présentées en ce qui a trait à la marche, à la déficience motrice cérébrale et aux études en adaptation locomotrice, le rationnel du projet de recherche sera présenté dans son ensemble. S’ensuivront une présentation des objectifs et des hypothèses de recherche.
1.5.1 Rationnel de recherche
Tel que présenté auparavant dans ce chapitre, la DMC s’accompagne de plusieurs limitations pouvant toucher les différents systèmes du corps humain. Parmi ces limitations se retrouve une diminution de la capacité à générer de l’énergie pour effectuer la poussée plantaire (Rose et al., 1993), ce qui pourrait expliquer la vitesse de marche réduite chez cette population (Duffy et al., 1996; Pirpiris et al., 2003). De plus, il est possible que les jeunes atteints d’une DMC présentent un déclin de leurs habiletés à se déplacer en grandissant. Un score élevé au GMFCS est associé à une plus grande probabilité de déclin (Day et al., 2007). Il se peut donc que la vitesse de marche des marcheurs atteints de DMC soit encore plus limitée avec l’avancement en âge. En lien avec cette vitesse de marche réduite, on sait que chez les personnes âgées, elle est associée au taux de survie (Studenski, 2011) et à l’indépendance fonctionnelle aux activités de la vie quotidienne (Potter et al., 1995). Il va donc sans dire que, dans un aspect de
27
prévention, il serait intéressant d’améliorer la capacité locomotrice des patients DMC pour augmenter leur vitesse de marche.
En se basant sur les expériences faites en adaptation locomotrice, plusieurs options semblent appropriées pour tenter de rééduquer la marche. Les expériences avec des robots sur tapis roulant semblent prometteuses pour différentes populations avec une atteinte neurologique. Par contre, pour améliorer la vitesse de marche, il est important de réentraîner la poussée plantaire qui se produit à la fin de la période d’appui, soit durant la phase de pré-oscillation. Une étude effectuée par Noël et collaborateurs suggère que l’entraînement de la poussée plantaire sur tapis roulant ne permettrait pas de modifier le contrôle anticipatoire (Noel et al., 2009). Par ailleurs, tel que mentionné, l’entraînement sur un tapis roulant ne représente pas nécessairement la même réalité que la marche au sol. L’absence de flux optique (Zadra & Proffitt, 2016) et les changements au niveau biomécanique (Lee & Hidler, 2008) font que cette approche est moins écologique. Par ailleurs, l’entraînement à l’aide de robot engendre un coût élevé associé à l’équipement en limitant ainsi l’accessibilité. Finalement, bien que moins limitant, il faut que les patients aient accès à un tapis roulant, ce qui pourrait aussi limiter l’accessibilité au traitement.
L’entraînement locomoteur au sol semble donc être un choix intéressant pour réentraîner la poussée plantaire. Le fait d’être au sol est plus fonctionnel et représentatif de la réalité quotidienne du patient. En fait, une étude effectuée en 2001 a montré qu’une approche motrice fonctionnelle, comparée à une intervention de physiothérapie standard axée sur la normalisation de la qualité du mouvement, permet d’obtenir plus de gain au niveau des habiletés fonctionnelles dans les activités de la vie quotidienne (Ketelaar et al., 2001).
Par la suite, il convient de se questionner sur les qualités de l’entraînement, soit en résistance ou en assistance du mouvement. Bien que Wu et collaborateurs aient montré une amélioration de la vitesse de marche chez des individus
post-28
AVC autant à la suite d’un entraînement en résistance qu’en assistance (Wu et al., 2014), ce genre d’adaptation ne semble pas être aussi efficace pour toutes les populations neurologiques ou pour tous les paramètres de la marche (Yen et al., 2015). De plus, le transfert au sol des adaptations observées sur un tapis roulant ne semble pas être aussi efficace lors de l’application d’un champ de force en assistance chez une population ayant une atteinte neurologique (Yen et al., 2012). Bien qu’on ne puisse pas nécessairement généraliser ces résultats, plusieurs études suggèrent qu’un entraînement en force des membres inférieurs, donc en accord avec le principe d’un entraînement en résistance, pourrait améliorer des paramètres de la marche chez les patients atteints d’une DMC (Andersson et al., 2003; Damiano & Abel, 1998; Dodd et al., 2002). Il faut cependant faire attention à l’entraînement visant uniquement le gain de force aux membres inférieurs, car les résultats des études effectuées sur ce sujet ne sont pas toujours positifs quant à l’amélioration des paramètres de la marche (Scianni et al., 2009; Taylor et al., 2013). Il faut plutôt voir la résistance comme un type d’entraînement qui permet une implication active du sujet dans son entraînement, facilitant ainsi un encodage de la mémoire motrice dans le cortex primaire (Kaelin-Lang et al., 2005). De plus, l’entraînement en résistance cause, tel que précisé antérieurement, des erreurs de mouvements qui favorisent ainsi la modification du contrôle anticipatoire.
Pour toutes ces raisons, bâtir un programme d’entraînement locomoteur, visant une adaptation locomotrice, en résistance et au sol semble une avenue prometteuse pour modifier le contrôle anticipatoire dans une tâche fonctionnelle. Puisque cette approche n’a pas encore été testée sur une population ayant une DMC, il convient de tester ce protocole sur une population saine et d’étudier comment le système nerveux d’une personne sans atteinte neurologique réagit à un entraînement en résistance au sol.
29 1.5.2 Objectifs
À la lumière de ces informations, l’objectif général du projet de recherche proposé dans ce mémoire est de déterminer si un protocole similaire à ceux utilisés pour les dorsifléchisseurs sur tapis roulant pourrait être utilisé pour entraîner la flexion plantaire au sol chez des adultes sains. Ceci serait fait dans le but de modifier les paramètres de la marche. L’objectif spécifique sera de mesurer l’augmentation de l’activité EMG du muscle soléaire (Sol), un des muscles responsables de la poussée plantaire, ainsi que l’angle maximal et la vitesse maximale de la poussée plantaire suite à un entraînement avec une résistance élastique au sol.
1.5.3 Hypothèses
Nos hypothèses, en lien avec nos objectifs de recherche, sont que:
1. Un entraînement de la poussée plantaire à l’aide d’une résistance élastique au sol causera une augmentation de l’activité anticipatoire EMG du muscle soléaire du côté où la résistance est appliquée. Cette augmentation va perdurer suite au retrait du champ de force, témoignant ainsi de ce changement de contrôle;
2. L’entraînement de la poussée plantaire causera une augmentation de l’angle maximal de flexion plantaire et de la vitesse maximale de la poussée plantaire durant la phase de pré-oscillation, et ce, du côté ipsilatéral à la résistance. Ces modifications persisteront temporairement après le retrait du champ de force, démontrant ainsi l’effet fonctionnel du changement de contrôle locomoteur;
3. Aucun changement ne sera observé dans la jambe du côté controlatéral à la résistance.