GÉOMÉTRIE VECTORIELLE
ET ANALYTIQUE DE L’ESPACE
3
eannée
2.1 Vecteurs de l’espace
1
2.1.1 Introduction
1
2.1.2 L’ensemble
32
2.1.3 Composantes et norme d’un vecteur
3
2.1.4 Opérations élémentaires sur les vecteurs
6
2.1.5 Produit scalaire
17
2.1.6 Déterminant d’ordre 3
23
2.1.7 * Produit vectoriel *
28
2.1.8 Ce qu’il faut absolument savoir
35
2.2 Droites dans l’espace
36
2.2.1 Équations paramétriques d’une droite
36
2.2.2 Équations cartésiennes d’une droite
39
2.2.3 Positions relatives de deux droites et intersections
41
2.2.4 Angles entre deux droites
42
2.3 Plans dans l’espace
46
2.3.1 Équations paramétriques d’un plan
46
2.3.2 Équations cartésiennes d’un plan
47
2.3.3 Positions relatives d’une droite et d’un plan
et intersections
52
2.3.4 Angles entre une droite et un plan
53
2.3.5 Positions relatives de deux plans et intersections
55
2.3.6 Angles entre deux plans
56
2.3.7 Distances entre points, droites et plans
57
2.3.8 Ce qu’il faut absolument savoir
60
2.4 Sphères dans l’espace *
61
2.4.1 * Équations cartésiennes d’une sphère *
61
2.4.2 * Équations paramétriques d’une sphère *
62
2.4.3 * Équations d’un plan tangent à une sphère *
63
2.4.4 * Ce qu’il faut absolument savoir *
65
AVANT-PROPOS
• Ce document a été conçu pour l’enseignement des mathématiques dispensé au Collège de
Genève en troisième année ; il traite de la géométrie vectorielle et analytique de l’espace.
Cela dit, il peut servir de support de cours pour d’autres filières d’enseignement.
• Vous trouverez dans ce chapitre de la théorie (définitions, théorèmes, démonstrations, etc.) et des exercices qui vous permettront progressivement de vous familiariser et de maîtriser les diverses notations et concepts mathématiques. À la fin du chapitre se trouvent les solutions des exercices.
• Les exercices accompagnés d’un astérisque (*), sont des exercices supplémentaires de
développement destinés, par exemple, aux élèves ayant choisi l’option, niveau avancé (MA2). • Pour mieux repérer les points importants de la théorie, les définitions sont dans un encadré
blanc et les théorèmes dans un encadré grisé.
• Pour vérifier votre niveau de compréhension à la fin de l’étude d’un sous chapitre, vous pouvez vous référer à la section : « Ce qu’il faut absolument savoir ».
• Des QR CODES apparaissent à certains endroits du cours. Une fois scannés avec vos smartphones, ils donnent (aux personnes ayant un compte EDUGE) accès à la lecture de vidéos dont le contenu est en lien avec certains sujets du cours.
• Vous pouvez télécharger ce document au format PDF à l’adresse suivante :
http://www.sismondi.ch/disciplines/mathematiques/espace-perso-profs/serge-picchione
• Pour finir, un grand merci aux collègues de divers établissements scolaires qui ont partagé leurs cours : Nicolas Chabal, Yves Drevous, Bernard Gisin, Alain Klopfenstein, Maurizio Lalicata, Bernard Lenggenhager, Romanita Nagy Gauxachs, Adrien Schleining et Serge Zoutter.
A B C D E F G H I J • • • • •
2.1 Vecteurs de l’espace
2.1.1 Introduction
Dans ce cours de Mathématiques, nous allons reprendre le concept de vecteur étudié en Physique. Nous nous intéresserons à généraliser et à modéliser ce concept afin de l'utiliser dans l'étude de la Géométrie.
Pour rappel, certaines grandeurs physiques peuvent être modélisées à l'aide d'un seul nombre. Par exemple, la température, la masse, une distance, un angle d'inclinaison, etc.
Ces grandeurs sont appelées grandeurs scalaires. D'autres grandeurs comme une force, une position, une vitesse, un champ électrique ne peuvent pas être modélisées qu'à l'aide d'un seul nombre. On a besoin de connaître leur direction, leur sens et leur intensité (un nombre).
Ces grandeurs sont alors appelées grandeurs vectorielles. t
v =vecteur position du"point" au temps t.
Définitions
Un vecteur vest un objet entièrement déterminé par la donnée d'une direction, d'un sens et d'une intensité (un nombre).
Si on considère deux points quelconques A et B du plan, on peut tracer une flèche de A à B. Cette flèche définit un vecteur car on a une direction (une droite), un sens (pointe) et une intensité (longueur de la flèche).
• On note ce vecteur v=AB et v = AB son intensité (on dit aussi norme de v). Le point A est l’origine du vecteur et le point B son extrémité.
• On appelle vecteur nul, noté 0, le vecteur dont le point d'application et l’extrémité coïncident : AA=BB=0. Le vecteur nul 0 à une intensité nulle, sa direction est indéterminée.
• Le vecteur opposé de v=AB est le vecteur dont l’origine est B et l’extrémité A. Il est noté − = −v AB=BA.
Deux vecteurs sont égaux si et seulement s’ils ont même direction, même sens et même intensité (longueur).
Exemples Les vecteurs AB et CD sont égaux (même norme, direction et sens). Les vecteurs AB et EF ne sont pas égaux car ils n’ont pas la même norme. Les vecteurs GH et JI ne sont pas égaux car ils n’ont pas le même sens.
O
•
•
•
A B A • B2.1.2 L’ensemble
3
Définitions
• Dans l'espace, un repère cartésien (orthonormé) est constitué d’un point O, nommé origine et de trois axes orientés Ox, Oy et Oz, perpendiculaires deux à deux, (muni d’une même échelle). • Un point P de l’espace, peut alors être représenté par trois nombres réels : x, y et z.
On notera : P x; y; z
(
)
.•
(
x; y; z)
est un triple de nombre réel et x, y, z sont les coordonnées cartésiennes de P.• Autrement dit, un point P de l'espace est identifié à un triple de nombre: P • ←→
(
x; y; z)
Illustration
L'ensemble de tous les triples de nombres
{
(
x ; y ; z)
x, y et z∈ se note :}
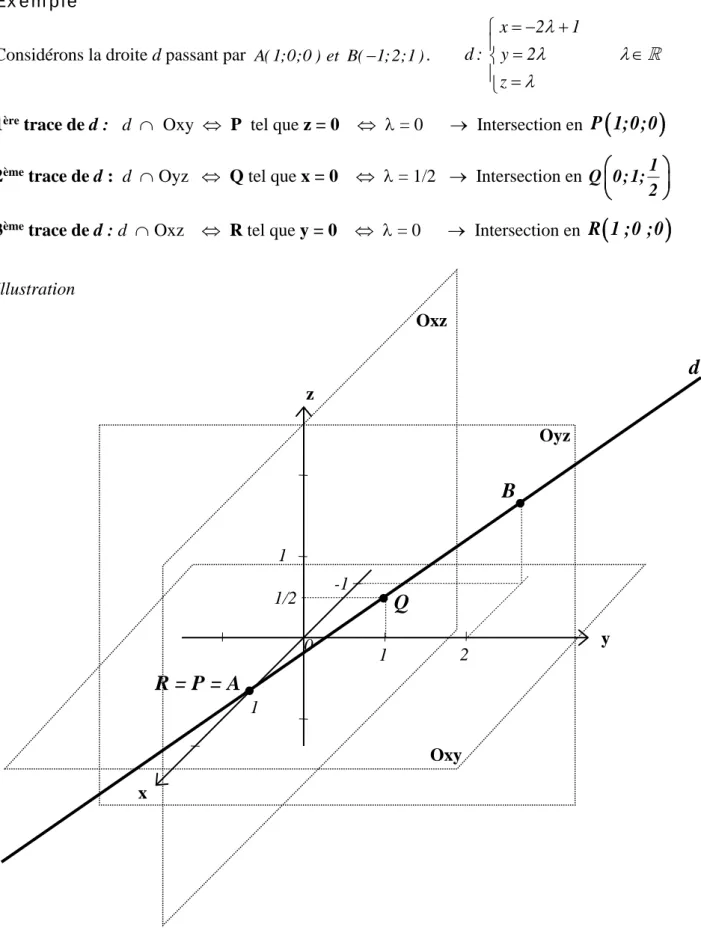
× × = 3 Notre espace usuel est donc identifié à 3.Exemple
Déterminons les coordonnées des points A, B, C, D, E, F et G de l’espace muni d’un repère orthonormé. O y z x x y z 0
•
A•
B 1 1 1•
E•
C•
D•
F•
G(
)
(
)
(
)
(
)
(
)
(
)
(
)
A 3;4 ;0 B 1;2 ; 1 C 2; 3 ;2 D 1; 1 ; 4 E 1;0 ; 4 F 0; 3 ;2 G 1;2 ;0 − − − − − − − − −•
•
2.1.3 Composantes et norme d’un vecteur
Soient A a ;a ;a et
(
1 2 3)
B b ;b ;b sont deux points de l’espace et(
1 2 3)
AB est un vecteur de l’espace.Illustration
1 2 3
a , a et a sont les coordonnées du point A , origine du vecteur AB.
1 2 3
b , b et b sont les coordonnées du point B , extrémité du vecteur AB.
Pour « aller » du point A (origine) au point B (extrémité) nous devons, suivant : - l’axe Ox, effectuer un déplacement de b1−a1unités.
- l’axe Oy, effectuer un déplacement de b2−a2unités.
- l’axe Oz, effectuer un déplacement de b3−a3unités. Définition
Soient A a ;a ;a et
(
1 2 3)
B b ;b ;b deux points de l’espace et(
1 2 3)
AB un vecteur de l’espace. Le nombre b1−a1 est la 1ère composante du vecteur AB (différence des coordonnées en x).Le nombre b2−a2 est la 2e composante du vecteur AB (différence des coordonnées en y).
Le nombre b3−a3 est la 3e composante du vecteur AB (différence des coordonnées en z).
On note alors AB=
(
b1−a ;b1 2 −a ;b2 3−a3)
ExemplesConsidérons les quatre points A 5; 1;0 , B 1; 4;5 , C 2; 2;4 et D 6;1; 1
(
−)
(
−)
(
−)
(
−)
de l’espace. On peut considérer les trois vecteurs :( ) ( )
(
)
(
)
( ) ( )
(
)
(
)
( )
( )
(
)
(
)
AB 1 5; 4 1 ;5 0 4; 3;5 BA 5 1; 1 4 ;0 5 4;3; 5 DC 2 6; 2 1;4 1 4; 3;5 = − − − − − = − − = − − − − − = − = − − − − − = − − • Le vecteur opposé de AB est le vecteur BA.
• Les vecteurs AB et DC sont équivalents (même direction, sens et intensité). • Les composantes d’un vecteur peuvent être négatives.
Proposition
Soient A a ;a ;a et
(
1 2 3)
B b ;b ;b deux points de l’espace et(
1 2 3)
AB un vecteur de l’espace.La norme du vecteur (intensité) AB est donné par : AB =
(
b1−a1) (
2+ b2−a2)
2 +(
b3−a3)
2 DémonstrationOn utilise le théorème de Pythagore.
On a deux triangles rectangles : r2 =
(
b1−a1) (
2+ b2−a2)
2 et AB 2 = +r2(
b3−a3)
2donc AB 2 =
(
b1−a1) (
2+ b2−a2) (
2 + b3−a3)
2⇔ AB =
(
b1−a1) (
2+ b2−a2) (
2+ b3−a3)
2Exemple
Considérons les points A 5; 1;0
(
−)
et B 1; 4;5(
−)
de l’espace. On a : AB= −(
1 5;( ) ( )
− − −4 1 ;5 0−)
= − −(
4; 3;5)
AB =(
1 5−)
2+ − − −(
( ) ( )
4 1)
2+ −(
5 0)
2 =( ) ( )
−4 2+ −3 2+52 = 50 =5 2 ≅7.07 BA=(
5 1;−( ) ( )
− − −1 4 ;0 5−)
=(
4;3; 5−)
BA =(
5 1−)
2+ − − −(
( ) ( )
1 4)
2+ −(
0 5)
2 = 42 +32+ −( )
5 2 = 50 =5 2 ≅7.07 A • • rRemarques
a) Chaque vecteur de l’espace est associé à un unique triple de nombre. Ces nombres sont les composantes du vecteur qui définissent sa direction, son sens et son intensité.
b) Deux vecteurs sont égaux si et seulement s’ils ont les mêmes composantes.
c) Il ne faut pas confondre le pointP
(
− −4; 3;5)
dont les coordonnées sont − −4, 3 et 5 avec le vecteur AB= − −(
4; 3;5)
dont les composantes sont − −4, 3 et 5.Dans les deux cas nous utilisons le même triple de nombres ; cependant les coordonnées de P représentent la « position » du point P relativement aux axes Ox, Oy et Oz alors que les composantes de ABreprésentent un « déplacement », une « translation ».
d) Pour chaque point P x; y; z
(
)
de l’espace on peut construire un vecteur OP d’origine O 0;0;0(
)
et d’extrémité P x; y; z(
)
:Les composantes de OP=
(
x 0; y 0; z− − −0) (
= x; y; z)
.Dans ce cas, les coordonnées de P et les composantes de OP ont mêmes valeurs.
Illustration
Un peu d'histoire
L’Irlandais Sir William Hamilton (1805-1865) fut l’un des premiers à utiliser les vecteurs et il est probablement l’inventeur du mot (mot venant du latin vehere, qui signifie « porter »). L’Allemand Hermann Grassman (1809-1877) introduisit la notation vectorielle à l’occasion de problèmes de physique. L’Américain Gibbs (1839-1903) et l’Anglais Heaviside (1850-1925), disciples de Hamilton, donnent au calcul vectoriel sa forme quasi définitive, mais ce type de « calcul » met assez de temps à
s’introduire en France. Michel Chasles (1793-1880), avait déjà pressenti l’importance du sens sur un axe sans aller jusqu’à la notion de vecteur.
•
2.1.4 Opérations élémentaires sur les vecteurs
Il y a deux opérations élémentaires qu’on peut définir sur les vecteurs. Définition
Additionner deux vecteurs a et b c’est obtenir le vecteur a +b en faisant coïncider les origines des vecteurs a et b et en dessinant un parallélogramme. Le vecteur a +b est la flèche sur une diagonale du parallélogramme.
On peut aussi faire coïncider l’extrémité de a avec l’origine de b et tracer une flèche de l’origine de a avec l’extrémité de b , on obtient a +b :
Définition
Multiplier un vecteur apar un scalaire λ (un nombre), c’est obtenir le vecteur λ⋅a en considérant qu’il a : • la même direction que a.
• une norme égale à λ ⋅ a .
• le même sens que a si λ > 0 et il est de sens opposé à a si λ < 0.
Remarques
a) En Physique le vecteur a +b est la « résultante » du vecteur a et b .
b) On constate que l’addition de deux vecteurs est un vecteur et que la multiplication d’un vecteur par un scalaire est aussi un vecteur.
c) Ces deux opérations sont essentielles pour modéliser les phénomènes physiques ainsi que pour obtenir certains résultats en géométrie.
Définition
Considérons a=
(
a ;a ;a1 2 3)
et b=(
b ;b ;b1 2 3)
deux vecteurs de l’espace et λ∈ un scalaire.(
1 2 3) (
1 2 3) (
1 1 2 2 3 3)
a + =b a ;a ;a + b ;b ;b = a +b ;a +b ;a +b (addition entre deux vecteurs)
(
1 2 3) (
1 2 3)
a a ;a ;a a ; a ; a
λ⋅ = ⋅ λ = λ⋅ λ⋅ λ⋅ (multiplication d’un vecteur par un scalaire)
Illustration
Exemple
Considérons v1=
(
3;1; 7−)
et v2 =(
10 ;0; 2−)
deux vecteurs de l'espace.Calculons : a=2v1+2v2 = ⋅2 3;1; 7
(
− + ⋅)
2 10 ;0; 2(
− =) (
6;2; 14−) (
+ 20 ;0; 4− =) (
26;2; 18−)
b =3v 1+v2 = ⋅3 3;1; 7
(
−) (
+ 10 ;0; 2− =) (
9;3; 21−) (
+ 10 ;0; 2− =) (
19;3; 23−)
RemarqueLes vecteurs sont devenus des triples nombres (composantes du vecteur).
Les opérations entre les vecteurs sont devenues des opérations entre des triples de nombres. On peut alors s'affranchir de la représentation géométriquement des vecteurs pour effectuer des opérations entre vecteurs. C'est plus facile et plus rapide.
Définition
La soustraction de deux vecteurs est définie, grâce à l’addition, par : a b − = + − = + − ⋅a
( )
b a( )
1 bExemple
(
) (
) (
) ( ) (
) (
) (
) (
)
a − =b 3;1; 2− − 6; 2; 4− − = 3;1; 2− + − ⋅1 6; 2; 4− − = 3;1; 2− + −6;2;4 = −3;3;2 Remarque
Les vecteurs a +b et a −b donnent les directions des diagonales du parallélogramme construit sur a et b.
O z x y A B
Définition
Soit n scalaires λ λ1, 2,...,λ et n vecteurs n v ,v ,...,v 1 2 n .
Le vecteur défini de la manière suivante : λ1 1v+λ2v2 +...+λnvn est appelé combinaison linéaire des vecteurs v ,v ,...,v 1 2 n .
Exemples
a) Le vecteur d= ⋅λ1 v1 est combinaison linéaire du vecteur v1. b) Le vecteur c= ⋅ +λ1 v1 λ2⋅v2 est combinaison linéaire
des vecteurs v et v1 2.
c) Le vecteur v1 n’est pas combinaison linéaire du vecteur v2 car il n’existe pas de scalaire λ tel que : v1= ⋅λ v2 .
Définition
Deux vecteurs a et b de l’espace sont colinéaires ⇔ ∃ ∈λ tel que b= ⋅λ a.
Trois vecteurs a,b et c de l’espace sont coplanaires ⇔ ∃λ µ, ∈ tel que c=λa+µb Illustration
Exemples
a) a = − −
(
9; 9;12)
et b =(
3;3; 4−)
sont colinéaires car a = − ⋅( )
3 b ou b 1 a 3
= − ⋅
b) a =
(
3;3; 4 , b−)
=(
2;1;3 et c)
= − −(
5; 7;18)
sont coplanaires car c= − ⋅ + ⋅( )
3 a 2 b Remarquesa) Deux vecteurs a et b colinéaires non nuls ont la même direction mais pas forcément le même sens ou intensité.
Si λ> alors a0 et b ont le même sens. Si λ< alors a0 et b sont de sens contraires.
b) Si deux vecteurs non nuls sont colinéaires alors un est combinaison linéaire de l'autre et réciproquement.
c) Si trois vecteurs non nuls sont coplanaires alors chaque vecteur est combinaison linéaire des deux autres.
Proposition (propriétés de l'addition vectorielle et de la multiplication par un scalaire) Soient a , b et c trois vecteurs de l’espace ainsi que λ µ, ∈ deux scalaires.
a + = +b b a commutativité de l'addition
P1)
( )
a b + + = + +c a( )
b c associativité de l'additionP2)
0 + =a a 0 est l' élément neutre pour l' addition
P3)
( )
a+ − =a 0 tout vecteur a possède un vecteur opposé a −
P4)
1 a⋅ = a 1 est l'élément neutre pour la multiplication
P5)
( )
a b a b distributivité λ⋅ + = ⋅ + ⋅λ λ P6)(
λ µ+)
⋅ = ⋅ + ⋅a λ a µ a P7)( )
a(
)
a associativité λ µ⋅ ⋅ = λ µ⋅ ⋅ P8) Exemples P1) a + =b ( 3;1;2 ) ( 0; 2;1 ) ( 3+ − = +0;1−2;2+1 )=( 3; 1;3 )− b + =a ( 0; 2;1 ) ( 3;1;2 )− + =( 0+ − +3; 2 1;1+2 )=( 3; 1;3 )− P4) Si a =( 0; 2;1 )− alors − =a ( 0;2; 1 )− car a+ − =( )
a(
0;0;0)
=0 P6) 2⋅( )
a +b = ⋅2 ( 3;1;2 ) ( 0; 2;1 )(
+ −)
= ⋅2 ( 3; 1;3 ) ( 6; 2;6 )− = − 2 a⋅ + ⋅ = ⋅ 2 b 2 ( 3;1;2 )+ ⋅2 ( 0; 2;1 ) ( 6;2;4 ) ( 0; 4;2 )− = + − =( 6; 2;6 )− Démonstration P1) a b ( a ;a ;a ) ( b ;b ;b ) ( a + = 1 2 3 + 1 2 3 = 1+b ;a1 2 +b ;a2 3+b )3 b a + =( b ;b ;b ) ( a ;a ;a )1 2 3 + 1 2 3 + =( b1+ +a ;b1 2+ +a2 ;b3+a )3 P3) 0 + =a ( 0;0;0 ) ( a ;a ;a ) ( 0+ 1 2 3 = +a ;01 +a ;02 +a ) ( a ;a ;a )3 = 1 2 3 =a P4) a ( a )+ − =(
a ;a ;a1 2 3) (
+ −a ; a ; a1 − 2 − 3) (
= a1−a ;a1 2−a ;a2 3−a3)
=( 0;0;0 )=0 P6) λ⋅( )
a +v = ⋅λ(
( a ;a ;a ) ( b ;b ;b )1 2 3 + 1 2 3)
= ⋅λ ( a1+b ;a1 2 +b ;a2 3+b )3 =(
λ⋅(
a1+b ;1) (
λ⋅ a2+b ;2) (
λ⋅ a3 +b3)
)
=(
λa1+λ λb ; a1 2+λ λb ; a2 3+λb3)
λ⋅ + ⋅ = ⋅a λ b λ ( a ;a ;a )1 2 3 + ⋅λ ( b ;b ;b ) ( a ; a ; a ) ( b ; b ; b )1 2 3 = λ λ1 2 λ 3 + λ λ λ1 2 3 =(
λa1+λ λb ; a1 2 +λ λb ; a2 3+λb3)
Les autres démonstrations sont à la discrétion du lecteur.• C
A •
• B
O •
Proposition (propriétés de la norme d’un vecteur)
Soient a et b deux vecteurs de l’espace ainsi que λ∈ un scalaire. P9) a ≥0 P10) a =0 ⇔ =a 0
P11) λ⋅a = λ ⋅ a P12) a b + ≤ a + b ( inégalité du triangle )
Les démonstrations sont à la discrétion du lecteur. Exemple P11) a =
(
3;4;5)
et 5 a⋅ =(
15;20;25)
2 2 2 2 2 2 5 a 15 20 25 1250 625 2 25 2 5 a 5 3 4 5 5 50 5 25 2 5 25 2 25 2 ⋅ = + + = = ⋅ = ⋅ ⋅ = ⋅ + + = ⋅ = ⋅ ⋅ = ⋅ ⋅ = ⋅ Proposition (Relations de Chasles)
Quels que soient les points A, B, C et O de l’espace, on a les trois relations suivantes :
P13) AB+BC= AC P14) − AB=BA P15) AB=OB−OA Exemple Points : O 0;0;0
(
)
; A 1;2 : 3(
−)
; B 5; 1;4 ; C(
−)
(
−5;2;4)
Relations de Chasles : • AB=OB−OA=(
5; 1;4−) (
− 1;2; 3− =) (
4; 3;7−)
• BC =OC−OB= −(
5;2;4) (
− 5; 1;4−) (
= −10;3;0)
• AC=AB+BC=(
4; 3;7−) (
+ −10;3;0) (
= −6;0;7)
• BA= −AB= − ⋅( ) (
1 4; 3;7−) (
= −4;3; 7−)
Remarquesa) La première relation de Chasles se généralise par exemple : AB+BC+CD=AD
b) AB≠OA OB+ Démonstration
P13) En mettant les deux vecteurs AB et BC de sorte que l'extrémité de
AB
coïncide avec le point d’origine de BC on obtient : AB BC+ qui est égal au vecteur AC.P14) On pose C=A et on considère AC= AB BC+
On obtient : AA=AB BA+ ⇔ =0 AB BA+ ⇔ + −0
( )
AB = + AB BA+ + −( )
AB ⇔ − AB=BADéfinition
Un vecteur u est unitaire ⇔ u =1 Proposition
P16) Si v ≠0, alors le vecteur u 1 v v
= ⋅
est un vecteur unitaire, de même direction et de même sens que v.
Remarque Cette opération, est appelée normalisation d’un vecteur. Exemple
• On considère le vecteur v=
(
1;1;1)
qui n’est pas unitaire car v = 12+ +12 12 = 3• On normalise le vecteur v :
(
)
2 2 2 1 1 1 1 1 u v 1;1;1 ; ; 3 3 3 3 v 1 1 1 1 1 1 et u 1 1 3 3 3 3 3 3 = ⋅ = ⋅ = = + + = + + = = Le vecteur u est unitaire et à la même direction el le même sens que v.
• On cherche un vecteur w de norme 3 et qui à la même direction et même sens que v : w 3 u 3 1 v 3 1 ; 1 3 ; 3 2 2 2 2 v = ⋅ = ⋅ ⋅ = ⋅ = et w =3 . Démonstration
Considérons le vecteur v=
(
a;b;c)
de norme v = a2 +b2 +c2 et le vecteur :(
)
2 2 2 2 2 2 2 2 2 2 2 2 1 1 a b c u v a;b;c ; ; v a b c a b c a b c a b c = ⋅ = ⋅ = + + + + + + + + • Calculons sa norme : 2 2 2 2 2 2 2 2 2 2 2 2 a b c u a b c a b c a b c = + + + + + + + + 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 a b c a b c 1 1 a b c a b c a b c a b c + + = + + = = = + + + + + + + +Le vecteur u est unitaire.
• Les vecteurs uet v sont colinéaires car il existe 1 0 v
λ= > tel que u= ⋅λ v Ils ont donc la même direction et le même sens.
Exercice 1
Considérons v
1=(
3;1; 7−)
et v
2 =(
10 ;0; 2−)
deux vecteurs de l’espace. Calculer les composantes et la norme des vecteurs suivants :1 2 a=3v +2v b = −v1 v2 c=v2−v1 d 1v1 2v2 2 3 = − e= ⋅5 a
Exercice 2 Réponse sur l’énoncé
Les vecteurs OA, OB et OCon une origine commune mais ne sont pas dans le même plan. a) Dessiner les vecteurs suivants qui sont combinaisons linéaires des vecteurs OA, OB et OC : 1) OA OB − 2) 2OA OC + 3) OB+2OC
3) OA OB + 4) OB OA − 5) −2OC −OB b) Parmi les vecteurs ci-dessus lesquels sont colinéaires ?
Exercice 3
On considère le parallélépipède représenté ci-contre. Compléter les égalités afin qu’elles soient vraies : a) AB+FG=A.... b) AG+CD=....H c) H .... CA+ =HA d) EH+DC+GA=....A e) AH+EB= A.... f) AB+CC+BH +GF =....E Exercice 4
Soit la pyramide de sommet S dont la base ABCD est un parallélogramme. On pose u =SA , v=SB , w=SC
Exprimer chacun des vecteurs AB , BC , AD , AC , SD et BD comme combinaison linéaire de u , v et w . A B C O
•
•
•
•
D • C • G • • B • A H • • E • FExercice 5
On considère, dans un repère orthonormé d’origine O 0 ;0 ;0
(
)
, les points A 0 ; 3 ;2(
−)
,(
)
B − −2 ; 3;2 et C
(
−1;2 ;0)
de l’espace.a) Dessiner, dans le repère ci-dessous, les vecteurs OA, OB, OC, AB, BC et AC. (Réponse sur l’énoncé)
b) Exprimer AB, BC et AC comme combinaison linéaire de OA , OB et OC (relations de Chasles) et calculer algébriquement les composantes de ces vecteurs : AB=
BC= AC=
c) Complétez les phrases suivantes :
1) Les composantes de
AB=(
... ; ... ; ...)
indiquent que, pour aller du point A au point B, il faut se déplacer de ………unités dans la direction x, de ……….unités dans la direction y, et enfin de ………unités dans la direction z.2) Les composantes de BC
=(
... ; ... ; ...)
indiquent que, pour aller du point B au point C, il faut se déplacer de ………unités dans la direction x, de ……….unités dans la direction y, et enfin de ………unités dans la direction z.3) Les composantes de
AC =(
... ; ... ; ...)
indiquent que, pour aller du point A au point C, il faut se déplacer de ………unités dans la direction x, de ……….unités dans la direction y, et enfin de ………unités dans la direction z.d) Calculer la norme des vecteurs AB, BC et AC. e) Calculer le périmètre du triangle ABC.
x y z O 1 1 1
•
B•
A•
C•
Marche à suivre pour résoudre les problèmes
1) Représenter la situation à l’aide d’un dessin schématique (points, droites, triangles, etc.) et déterminer les inconnues. Il n’est pas nécessaire de dessiner le problème à l’échelle. 2) Dessiner les vecteurs utiles à votre problème sur le schéma et écrire les égalités vectorielles. Utiliser, si nécessaire, les règles de Chasles.
3) Écrire les vecteurs à l’aide des composantes (couples de nombres). 4) Résoudre algébriquement.
Exercice 6
Considérons les 4 points A 3; 3; 2 , B
(
− −) (
− −1; 6;3 , C 0; 4;2 et D 4; 1; 3) (
−)
(
− − .)
a) Déterminer les composantes des vecteurs AB, AC , AD, BC , BD , BA et CD en utilisant les relations de Chasles .
b) Parmi ces vecteurs, lesquels sont égaux ?
c) Que peut-on conclure à propos du quadrilatère ABCD ? Exercice 7
Soit le pointA 1;1;1
(
)
. En utilisant les relations de Chasles déterminer : a) les coordonnées du point B tel que AB=(
4; 3; 1− −)
.b) les coordonnées du point C tel que BC=
(
4; 3;8−)
. c) les composantes du vecteur CA.d) les coordonnées des points E et F si EF=
(
2;3;3)
. Exercice 8On donne le points A
(
−1;8;3)
et B 9; 7; 2(
− − .)
Calculer les coordonnées des points C, D, E et F qui divisent le segment [AB] en 5 parties égales. Exercice 9
a) On considère le point M, milieu du segment [AB]. 1) Monter que OM 1
(
OA OB)
2
= ⋅ +
.
2) Déterminer les coordonnées du pointM si A a ;a ;a
(
1 2 3)
et B b ;b ;b(
1 2 3)
. b) Si A 2; 3;5 et B 4;4;4(
−)
(
)
, déterminer les coordonnées du point M. c) Considérons les trois points distincts A, B et C du plan.Soit M le milieu de
[ ]
AC et N le milieu de[ ]
BC . Montrer que MN 1AB 2 = . B A C D A B M ORappel Convention d’écriture
• On dessinera un triangle défini par les lettres ABC en plaçant les sommets en tournant dans le sens trigonométrique (anti-horaire). • On dessinera un quadrilatère défini par les lettres ABCD en plaçant les sommets en tournant dans le sens trigonométrique (anti-horaire). Exercice 10 *
Le centre de gravité G d'un objet est une notion physique qui est liée, entre autres choses, à la répartition de la masse à l'intérieur de cet objet. C'est en ce point qu'une force égale au poids de l'objet doit être appliquée pour que celui-ci soit en équilibre. Dans le cas d'une masse homogène et d'un champ de gravitation uniforme, le centre de gravité est en rapport
direct avec la géométrie de l'objet et ses axes de symétrie : le centre de gravité d'un triangle se trouve à l'intersection de ses médianes et celui d'un rectangle à l'intersection de ses diagonales. Soit A a ;a ;a , B b ;b ;b
(
1 2 3) (
1 2 3)
et C c ;c ;c(
1 2 3)
les sommetsdu triangle ABC dans le plan. Par définition, le point G g ; g ; g
(
1 2 3)
est le centre de gravité du triangle ABC s’il satisfait vectoriellementGA GB GC+ + =0 . a) Montrer que OG 1
(
OA OB OC)
3 = ⋅ + + . b) Déterminer les coordonnées du point G. Exercice 11Soit A, B, C et D, quatre points distincts. On a l’équivalence suivante :
AD BC ( vecteurs égaux ABCD est un parall
) ou DC AB ( vecteurs égaux élogram ) me = ⇔ =
Soit les 4 points A 5; 1;0 , B 1; 4;5 , C 2; 2;4 et D 6;1; 1
(
−) (
−) (
−)
(
−)
. a) Déterminer les composantes des vecteurs AB et DC .b) Que peut-on conclure à propos du quadrilatère ABCD ?
c) Déterminer les coordonnées du point M milieu du segment
[ ]
AC et les coordonnées du point N milieu du segment[ ]
BD . Que constate-t-on ? Quelle conjecture peut-on énoncer ?Exercice 12
Soit les 3 points A 2; 5;2 , B
(
−) (
−2;3;4 et C 6;4;10)
(
)
.a) Déterminer, à l’aide du calcul vectoriel, les coordonnées du point D tel que ABCD soit un parallélogramme.
b) Déterminer, à l’aide du calcul vectoriel, les coordonnées du point M intersection des 2 diagonales de ce parallélogramme.
A D B C B A C B A C D G • G B A C O
•
•
•
•
Exercice 13
a) Soit A, B et C trois points distincts.
On a l’équivalence suivante :
(
)
(
)
A, B et C sont alignés
se trouvent sur la même droite ⇔ ∃ ∈λ tel que BC= ⋅λ AB AC et AB sont colinéaires
En utilisant l’équivalence ci-dessus, déterminer dans chaque cas si les points A, B et C sont alignés. 1) A 6;4; 3 , B 14; 12;3 et C 2;12; 6
(
−) (
−)
(
−)
2) A 6;4; 3 , B 14; 12;3 et C 4;14; 4
(
−) (
−)
(
−)
b) Soit A, B, P et Q, quatre points distincts.
On a l’équivalence suivante :
(
)
AB PQ
d d
tel que AB PQ AB et PQ sont colinéaires ( les droites sont parallèles ) ⇔ ∃ ∈λ = ⋅λ
En utilisant l’équivalence ci-dessus, déterminer dans chaque cas si la droite passant par le point P et Q est parallèle à la droite passant par A et B.
1)P 1; 1;1 , Q 4;3;2 , A
(
−) (
) (
−1;5;1 et B 5;2;2)
(
)
2) P 1; 1;1 , Q 4;3;2 , A 3; 3;3 et B 12;9;6
(
−) (
) (
−)
(
)
Exercice 14
Déterminer par calcul, un vecteur u de l’espace :
a) unitaire du plan ayant la même direction et même sens que v=
(
4; 3;1−)
.b) de l'espace de longueur 5 ayant la même direction et même sens que w =
(
7 ;3; 4−)
. c) unitaire de l'espace ayant la même direction que x = − − −(
3 ; 3; 3)
.Exercice 15
Soit les trois points A 1;2;3 , B 2;5;8 et C
(
)
(
)
(
−2;7;4)
. a) Le triangle ABC est-il isocèle ou équilatéral ? Justifier. b) Calculer le périmètre et l’aire du triangle.A B C
•
•
•
P Q A B•
•
•
•
2.1.5 Produit scalaire
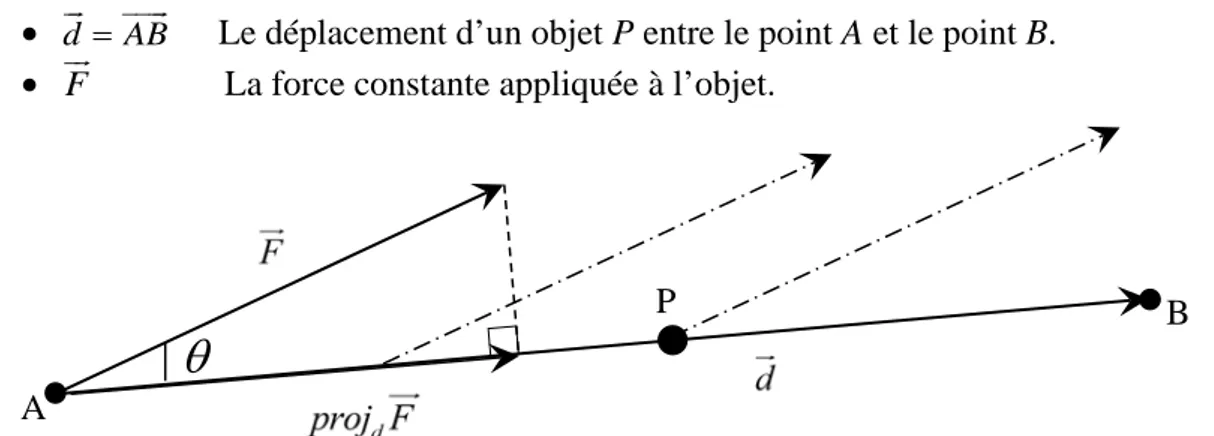
Considérons les deux vecteurs :
• d = AB Le déplacement d’un objet P entre le point A et le point B. • F La force constante appliquée à l’objet.
En Physique, on définit le travail W d’une force F constante appliquée à un objet P se déplaçant d’un point A à un point B ( d = AB) par : W = proj Fd ⋅ d
Donc :
( )
( )
(
)
d
notation
W = proj F ⋅ d = F ⋅cos θ ⋅ d = d ⋅ F ⋅cos θ = F d produit scalaire de F et d
Remarque Si F est perpendiculaire à d = AB alors laproj Fdest nulle et le travail W est nul. Définition (Mathématique)
Le produit scalaire de deux vecteurs a et b noté a b , est le nombre réel (scalaire) défini par
a b= a ⋅ b cos( )⋅ θ
avec 0≤ ≤θ 180 qui est la mesure de l’angle formé par les vecteurs
a
et b lorsqu’on les rapporte à une même origine.
Illustration Exemples a) Si a =
(
1;1;0 et b)
=(
0;0;3)
alors a b = 2 3 cos 90⋅ ⋅( )
= 2 3 0⋅ ⋅ =0 b) Si a =(
1;1; 2 et b−)
= − −(
2; 2;4)
alors a b = 6⋅ 24 cos 180⋅( )
= 6⋅ 24⋅ − = −( )
1 12θ
A B P θThéorème (Expression du produit scalaire de deux vecteurs a et b de l’espace à l’aide des composantes)
(
1 2 3)
(
1 2 3)
Si a = a ;a ;a et b= b ;b ;b alors on peut calculer le produit scalaire a b de la manière suivante : a b = ⋅ +a b1 1 a b2⋅ + ⋅2 a b3 3
Exemples
a) Si a=
(
1;1;0 et b)
=(
0;0;3)
alors a b = ⋅ + ⋅ + ⋅ =1 0 1 0 0 3 0b) Si a=
(
1;1; 2 et b−)
= − −(
2; 2;4)
alors a b = ⋅ − + ⋅ − + − ⋅ = −1( )
2 1( ) ( )
2 2 4 12Démonstration
Appliquons le théorème du cosinus :
(
)
2 2 2 2 2 2 a b a b a b 2 a b cos( ) 1 a b cos( ) a b a b 2 θ θ = − = + − ⋅ ⋅ ⇔ ⋅ ⋅ = ⋅ + − − Avec les composantes :(
) (
) (
)
(
)
(
)
(
) (
) (
)
(
)
(
) (
) (
)
(
)
2 2 2 2 2 2 2 2 2 1 2 3 1 2 3 1 1 2 2 3 3 2 2 2 2 2 2 2 2 2 1 2 3 1 2 3 1 1 2 2 3 3 2 2 2 2 2 2 2 2 2 2 2 2 1 2 3 1 2 3 1 1 1 1 2 2 2 2 3 3 3 3 2 2 2 2 2 2 1 2 3 1 2 3 1 a b a a a b b b a b a b a b 2 1 a a a b b b a b a b a b 2 1 a a a b b b a 2a b b a 2a b b a 2a b b 2 1 a a a b b b a 2 ⇔ = ⋅ + + + + + − − + − + − = ⋅ + + + + + − − − − − − = ⋅ + + + + + − − + − − + − − + = ⋅ + + + + + − (
2 2 2 2 2 2)
1 +2a b1 1−b1 −a2 +2a b2 2−b2 −a3 +2a b3 3−b3(
1 1 2 2 3 3)
1 1 2 2 3 3 1 2a b 2a b 2a b a b a b a b 2 = ⋅ + + = + + PropositionSoit a , b et c trois vecteurs de l’espace ainsi que λ∈ un scalaire.
P1) a b =b a Le produit scalaire est commutatif.
P2) a b c
( )
+ =a b +a c Le produit scalaire est distributif par rapport à l'addition. P3)( )
λa b =a( ) ( )
λb =λ a b P4) b b = b 2 Le produit scalaire d'un vecteur avec lui-meme donnele carré de sa norme.ˆ
Démonstration
P1) a b =
(
a ;a ;a1 2 3) (
b ;b ;b1 2 3)
=a b1 1+a b2 2+a b3 3 b a =(
b ;b ;b1 2 3) (
a ;a ;a1 2 3)
=b a1 1+b a2 2 +b a3 3Les autres démonstrations sont à la discrétion du lecteur. θ
Proposition
La mesure de l’angle formé par deux vecteurs a et b est donné par : arccos a b avec 0 180
a b θ = ≤ ≤θ ⋅ Remarque : 1 arccos=cos− Exemple
Considérons les deux points A 1;1;1 et B 1;1;0 .
(
)
(
)
Calculons la mesure de l’angle θ =AOB à l’aide du
produit scalaire : arccos OA OB arccos 1 1 1 1 1 0 arccos 2 35,26
3 2 6 OA OB θ = = ⋅ + ⋅ + ⋅ = ≅ ° ⋅ ⋅
Démonstration a b a b cos( ) cos( ) a b arcos a b
a b a b θ θ θ = ⋅ ⋅ ⇔ = ⇔ = ⋅ ⋅ Remarques
De la définition du produit scalaire a b = a ⋅ ⋅b cos( )θ , il ressort que le signe du produit scalaire dépend uniquement de l’angle θ entre les deux vecteurs
(
0≤ ≤θ 180)
:cosθ 0 ⇔ > ⇔ θ aigu a b > 0. cosθ 0 ⇔ = ⇔ θ = 90 a b = 0. cosθ 0 ⇔ < ⇔ θ obtus a b < 0. Définition
Deux vecteurs non nuls a et b sont orthogonaux ⇔a b 0 =
Autrement dit : a et b sont orthogonaux si et seulement si l’angle formé par les vecteurs a et b est un angle droit.
Exemple a =
(
1;1;0 et b)
=(
0;0;3 sont orthogonaux car a b)
= ⋅ + ⋅ + ⋅ =1 0 1 0 0 3 0θ θ -1
•
0 1•
θ•
cos(θ) θ = 90° θ θProjection orthogonale d’un vecteur sur un autre vecteur
Proposition Illustration
Soit aet b ≠0 deux vecteurs de l’espace. Si p est le vecteur résultant de la projection orthogonale de asur b alors p a b2 b
b = ⋅ . Exemple
Soit deux vecteurs a = −
(
2;1;3 et b)
=(
2; 1;1−)
. La projection orthogonalep de a sur b est donnée par :(
)
(
)
2 2 2 2 a b 2 2 1 ( 1 ) 3 1 1 2 1 1 p b 2; 1;1 2; 1;1 ; ; 2 ( 1 ) 1 3 3 3 3 b − ⋅ + ⋅ − + ⋅ = ⋅ = ⋅ − = − ⋅ − = − − + − + DémonstrationPar construction p et b
sont colinéaires, c’est-à-dire qu’il existe un nombre réelλ
tel que p =λ b⋅.Déterminons le réel
λ
qui est l’inconnue :
(
p−a b)
=0 p−a et b sont orthogonaux par construction. p b a b 0⇔ − = propriété du produit scalaire : distributivité
( )
λb b a b 0⇔ − = p et b
sont colinéaires : p =λ b⋅( )
b b a b 0 λ⇔ − = propriété du produit scalaire : associativité
a b b b λ ⇔ =
algèbre : on isole le nombre
λ
2 a b b λ ⇔ =
propriété du produit scalaire :norme
Conclusion : p =λ b a b2 b b ⋅ = ⋅ Remarques
a) p et b sont colinéaires donc
p à la même direction que b mais pas forcément le même sens. b) La projection orthogonale de a sur b notée a' n’est en général pas égale à la projection orthogonale de b sur a notée b'.
•
Exercice 16
À partir de la définition du produit scalaire remplir le tableau suivant :
(réponse en valeur exacte et il s'agit de vecteurs de l’espace)
i j k i + j i− j i j k i+ j Exercice 17
Soit les cinq vecteurs a = −
(
3;3;1 , b)
= −(
1;2; 1 , i−)
=(
1;0;0)
, j=(
0;1;0 et k)
=(
0;0;1)
. Calculer les expressions suivantes en utilisant uniquement les composantes des vecteurs :1) i j 2) −a
( )
b−i 3) a ( )
i b 4) a i +b j +(
a −b)
k Exercice 18a) Soit les deux vecteurs a =
(
3;2; 1 et b−)
=(
1;1;0)
.Calculer la mesure de l'angle θ formé par les vecteurs a et b . b) Soit les trois points A
(
−1;2 ; 3 , B 2;1; 4 et C−) (
−)
(
−1;0;5)
. Calculer la mesure de l’angle BAC.Exercice 19
Soit les deux vecteurs a =
(
2;0;1 et b)
=(
1;2;3)
. a) Déterminer un vecteur n=(
n ;n ;n1 2 3)
, orthogonal à a.b) Combien y a-t-il de vecteurs c, orthogonaux à a et à b ? Justifier votre réponse. c) Déterminer un vecteur c=
(
c ;c ;c1 2 3)
, orthogonal à a et à b.d) Déterminer un vecteur u=
(
u ;u ;u1 2 3)
, orthogonal à a et à b et unitaire. Exercice 20Soit deux vecteurs a=
(
1;2; 3 et b−)
=(
1;1;2)
.a) Déterminer la projection orthogonale de a sur b notée a'. b) Déterminer la projection orthogonale de b sur a notée b'. c) Que constate-t-on ? 0 z 1 1 1 y x
A C D B O • • • • •
Marche à suivre pour résoudre les problèmes
1) Représenter la situation à l’aide d’un dessin schématique (points, droites, triangles, etc.) et déterminer les inconnues. Il n’est pas nécessaire de dessiner le problème à l’échelle. 2) Dessiner les vecteurs utiles à votre problème sur le schéma et écrire les égalités vectorielles. Utiliser, si nécessaire, les règles de Chasles.
3) Écrire les vecteurs à l’aide des composantes (couples de nombres). 4) Résoudre algébriquement.
Exercice 21
Considérons les trois points A 3;1; 3 , B 5;2; 7
(
−) (
−)
et C 6;5; 8(
−)
.a) Déterminer les coordonnées d’un point D tel que ABCD soit un parallélogramme. b) Déterminer la projection orthogonale p du vecteur AD sur le vecteur AB.
c) Déterminer les coordonnées d’un point P situé sur le segment
[ ]
AB tel que le triangle ADP soit rectangle en P.d) Calculer l’aire du parallélogramme ABCD.
Exercice 22
Considérons A 1;2;3 , B 4;8; 3 et C 6;3;2
(
) (
−)
(
)
, les trois sommets du triangle ABC.a) Déterminer la projection orthogonale du vecteur AC sur le vecteur AB.
b) Déterminer les coordonnées du point D, pied de la perpendiculaire abaissée du point C sur le segment [AB]. c) Calculer l’aire du triangle ABC.
Exercice 23 *
Dans le minerai de sphalérite, chaque atome de zinc est entouré de quatre atomes de soufre qui forment un tétraèdre régulier dont l'atome de zinc occupe le centre.
L'angle de liaison θ est l'angle formé par la combinaison S-Zn-S.
Démontrer que la valeur en degré de l'angle de liaison vaut : θ ≅109,47°.
Remarque : un tétraèdre régulier (toutes ces faces sont des triangles équilatéraux) peut toujours s'inscrire dans un cube : les arêtes du tétraèdre coïncident alors avec les diagonales des faces du cube.
2.1.6 Déterminant d’ordre 3
Définition
Soient trois vecteurs a =
(
a ;a ;a , b1 2 3)
=(
b ;b ;b1 2 3)
et c=(
c ;c ;c1 2 3)
de l’espace. Le déterminant d'ordre 3 de a ,b et c (pris dans cet ordre), noté Det a;b;c(
)
, est le nombre réel (scalaire) défini par :(
)
(
)
(
)
(
)
1 1 1 2 2 1 1 1 1 2 2 2 1 2 3 3 3 3 3 2 2 3 3 3 1 2 3 3 2 2 1 3 3 1 3 1 2 2 1 a b c b c b c b c Det a;b;c a b c a a a b c b c b c a b c a b c b c a b c b c a b c b c = = ⋅ − ⋅ + = − − − + − Autrement dit, pour calculer un déterminant d’ordre 3, il faut multiplier chaque terme de la 1ère colonne par les déterminants d’ordre 2 obtenus en traçant la ligne et la colonne passant par ce terme. Exemple
(
)
(
)
(
)
Si a = 2;0;1 , b = −1;3; 2 et c− = 0;2; 3−
(
)
2 1 0 3 2 1 0 1 0alors Det a;b;c 0 3 2 2 0 1 10 2 12
2 3 2 3 3 2 1 2 3 − − − = = ⋅ − ⋅ + ⋅ = − − = − − − − − − − Remarque
(
)
(
)
(
)
(
)
Det a;b;c = −Det b;a;c = −Det a;c;b = −Det c;b;a
L'ordre dans lequel sont pris les vecteurs a ,b et c , influence le signe du déterminant. Proposition
Soient trois vecteurs a =
(
a ;a ;a , b1 2 3)
=(
b ;b ;b1 2 3)
et c=(
c ;c ;c1 2 3)
de l’espace. Le volume V du parallélépipède engendré par a ,b et c est égale, au signe près, à la valeur du déterminant d'ordre 3 de a ,b et c c’est-à-dire : V = Det a;b;c(
)
Illustration
O
z
x
Exemple
Soit trois vecteurs a =
(
2;0;0 , b)
=(
0;2;0 et c)
=(
0;0;2)
.2 0 0 2 0 Det( a;b;c ) 0 2 0 2 2 ( 2 2 ) 8 0 2 0 0 2 0 2 0 2 0 Det( b;a;c ) 2 0 0 2 2 ( 2 2 ) 8 0 2 0 0 2 = = ⋅ = ⋅ ⋅ = = = − ⋅ = − ⋅ ⋅ = −
Le volume V du parallélépipède engendré par a ,b et c (cube de côté 2) est égal à Det( a;b;c ) =8
.
Démonstration * En exercice.
Rappels
• Deux vecteurs a et b de l’espace sont colinéaires ⇔ ∃ ∈λ tel que b= ⋅λ a.
• Trois vecteurs a,b et c de l’espace sont coplanaires ⇔ ∃λ µ, ∈ tel que c=λa+µb
Exemples
a) a=
(
1;2;3 et b)
=(
2;4;6)
sont colinéaires car b=2a. b) i=(
1;0;0 et j)
=(
0;1;0)
ne sont pas colinéaires car i≠λj c) Dans l'espace a =(
1;2;0 , b)
=(
2;1;0 et c)
=(
4;4;0)
sont coplanaires car c 4a 4b3 3
= +
.
d) Dans l'espace i=
(
1;0;0 , j)
=(
0 ;1;0 et k)
=(
0;0;1)
ne sont pas coplanaires car i≠λj+µk.0 z 2 2 2 y x