La coordination visuo-locomotrice lors de changement de direction et de contournement d’obstacle chez des personnes ayant une lésion de la moelle
épinière
Mémoire
Caroline Charette
Maîtrise en médecine expérimentale - Maître ès sciences (M. Sc.)
Québec, Canada
La coordination visuo-locomotrice lors de changement de direction et de contournement d’obstacle chez des personnes ayant une lésion de la moelle
épinière
Mémoire
Caroline Charette
Bradford J. McFadyen, Ph. D, directeur de recherche François Routhier, ing., Ph. D, co-directeur
Résumé
L’objectif de ce mémoire était de comparer le contrôle visuo-locomoteur en fauteuil roulant manuel et motorisé chez des personnes expérimentées en fauteuil roulant. Des individus ayant une lésion de la moelle épinière ont été recrutés, soient plus précisément 12 usagers de fauteuil roulant manuel et 10 de fauteuil roulant motorisé. Les participants devaient naviguer avec leur fauteuil roulant à une vitesse naturelle en ligne droite, lors de changement de direction et lors de contournement d’obstacle. Les résultats n’ont démontré aucune différence entre les groupes concernant le comportement navigationel et la coordination de la réorientation du corps et du fauteuil roulant. Le comportement visuel semblait dépendre davantage des exigences environnementales. Ainsi, les usagers en fauteuil roulant manuel et motorisé ont adopté des stratégies navigationnelles et une coordination temporelle visuo-locomotrice similaires lors de changements de direction et de contournements d’obstacle. Les résultats ont également démontré des similitudes dans la coordination visuo-locomotrice avec la marche bipède, suggérant ainsi une généralisation des stratégies visuo-locomotrices parmi différents modes de locomotion. Ces résultats pourront aider à l’évaluation et à l’entraînement des habiletés en fauteuil roulant manuel et motorisé par les cliniciens, en plus d’aider au développement de technologies d’assistance à la navigation basées sur le contrôle visuo-locomoteur des personnes expérimentées en fauteuil roulant.
iv
Abstract
The objective of this master’s thesis was to compare the visuo-locomotor control in manual and power wheelchair in experienced wheelchair users. Therefore, individuals with a spinal cord injury were recruited; more precisely 12 manual wheelchair users and 10 power wheelchair users. The participants were asked to navigate with their own wheelchair at natural self-selected speed straight-ahead, while changing direction and while circumventing an obstacle. No difference between groups was found for the navigational behavior as well as for the temporal body and wheelchair coordination. Specific gaze behavior depended predominantly on the environmental demands. In conclusion, manual and power wheelchair users adopted similar navigational strategies and body and wheelchair coordination while changing direction and circumventing an obstacle. These results also demonstrated similarities with visuo-locomotor coordination with biped gait, which suggest a generalization in visuo-locomotor coordination strategies across different locomotor modes. Such results may help evaluating and training WC skills, as well as developing assistive navigational technologies based on one’s natural visuo-locomotor control.
Table des matières
Résumé ... iii
Abstract ... iv
Table des matières ... v
Liste des tableaux ... vii
Liste des figures ... viii
Liste des abréviations et des sigles ... ix
Remerciements ... x
Avant-propos ... xi
Chapitre 1 : Introduction ... 1
1.1Problématique générale ... 1
1.2
Portrait des utilisateurs de fauteuil roulant au Canada et aux États-Unis ... 2
1.2.1 La prévalence des usagers de fauteuil roulant ... 2 1.2.2 Les causes d’utilisation d’un fauteuil roulant ... 3 1.3
Portrait des usagers de fauteuil roulant ayant une lésion de la moelle épinière ... 3
1.3.1 La prévalence et l’incidence des lésions de la moelle épinière ... 3 1.3.2 Les conséquences d’une lésion de la moelle épinière ... 4 1.3.3 L’utilisation de fauteuil roulant manuel ou motorisé chez les personnes ayant une lésion de la moelle épinière ... 5 1.4
Utilisation au quotidien d’un fauteuil roulant ... 5
1.5
La locomotion adaptative et le système visuel ... 7
1.6
Le contrôle visuo-locomoteur à la marche chez les personnes sans incapacités ... 8
1.6.1 Changement de direction ... 8 1.6.2 Contournement d’obstacle ... 9 1.7
Le contrôle visuo-locomoteur en fauteuil roulant ... 10
1.7.1 Fauteuil roulant manuel ... 10 1.7.2 Fauteuil roulant motorisé ... 11 1.8
Le contrôle visuo-locomoteur lors de la conduite automobile ... 11
1.9
Limitations des études actuelles ... 12
1.10
Objectifs et hypothèses ... 13
Chapitre 2 : Méthodologie générale ... 14
2.1Population et recrutement ... 14
2.2
Critères d’inclusion et d’exclusion des participants ... 14
2.2.1 Recrutement des participants ... 15 2.3
Procédures d’évaluation en laboratoire ... 15
2.3.1 Questionnaires auto-administrés ... 16 2.3.2 Préparation du participant ... 17
vi 2.3.3 Protocole expérimental ... 18 2.4. Procédures d’analyse ... 18
2.4.1 Traitement des données ... 18 2.4.2 Variables dépendantes ... 19 2.4.3 Procédures statistiques ... 20
Chapitre 3 : Article 1 ... 22
3.1Résumé ... 22
3.2
Article ... 23
3.2.1
Abstract ... 24
3.2.2
Introduction ... 25
3.2.3
Methods ... 28
3.2.4
Results ... 31
3.2.5
Discussion ... 33
3.2.5
References ... 41
Chapitre 4. Résultats supplémentaires ... 49
Chapitre 5. Discussion et conclusion ... 51
5.1 Comportement navigationnel ... 515.2 Coordination temporelle ... 53
5.3 Comportement visuel ... 56
5.4 L’impact de l’expérience ... 57
5.5 Retombées cliniques et perspectives ... 57
5.6 Limites de l’étude ... 58
5.7 Conclusions ... 58
Bibliographie ... 60
Annexes ... 65
Annexe A : Évaluation du score ASI ... 65
Annexe B. Formulaire d’information et de consentement ... 68
Annexe C. Questionnaire sociodémographique ... 75
Annexe D. Questionnaires WST pour usagers en fauteuil roulant manuel et motorisé .. 79
Annexe E. Questionnaires WheelCon pour usagers en fauteuil roulant manuel et
motorisé ... 96
Annexe F. Position des marqueurs et points de repères anatomiques ... 109
Annexe G. Feuilles de collecte de données ... 111
Liste des tableaux
Tableau 1. American Spinal Injury Association Impairment Scale (ASI score; Annexe A) ... 5
Tableau 2. Description de la variable comportement visuel ... 20
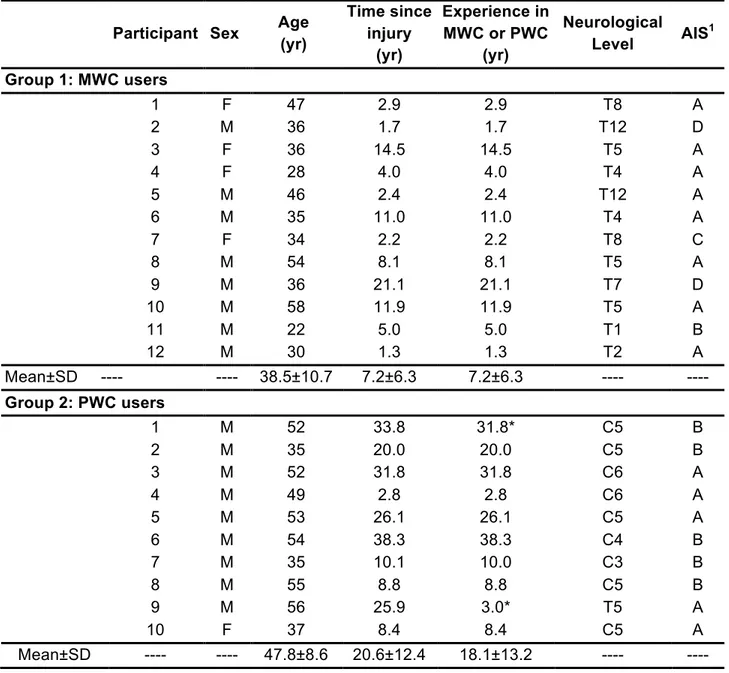
Table 3. Participants' characteristics for both groups of wheelchair users ... 43
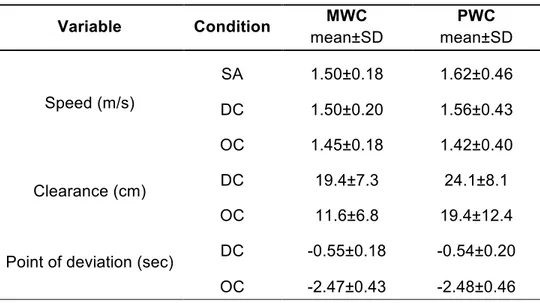
Table 4. Navigational behavior variables for each condition ... 44
viii
Liste des figures
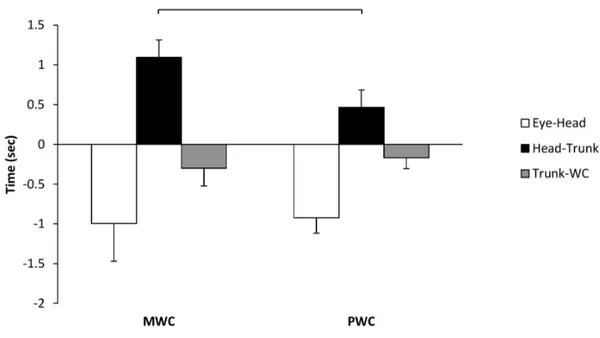
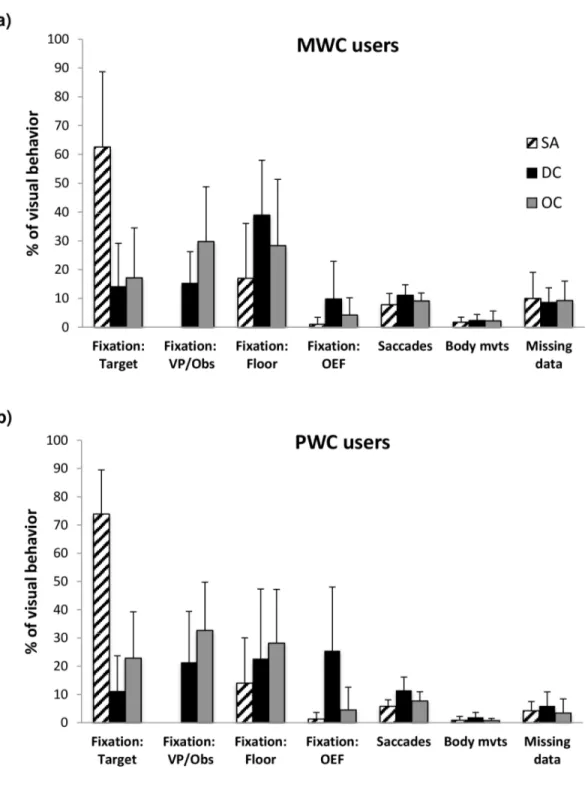
Figure 1. Image tirée d’un enregistrement vidéo du Eye Tracker présentant le point de regard d’un participant (curseur rouge) dans l’environnement. ... 18 Figure 2. Experimental set-up for the straight-ahead (a), direction change (b), and obstacle circumvention (c) conditions. The arrows indicate the direction of the path of each task. .. 45 Figure 3. Temporal coordination of body segments and WC during DC and OC conditions. ... 46 Figure 4. Relative timing of movements between adjacent segments during DC condition ... 47 Figure 5. Averages and standard deviations for proportion (in percentage) of different visual behaviors for SA, DC and OC conditions (see legend) for MWC (a) and PWC (b) users. ... 48
Liste des abréviations et des sigles
CD Changement de direction CO Contournement d’obstacle FR Fauteuil roulant LD Ligne droite MWC Manual wheelchairOEF Other environmental features
PWC Power wheelchair
SCI Spinal cord injury
WC Wheelchair
WheelCon Wheelchair use confidence scale WST-Q Wheelchair skills test-questionnaire
x
Remerciements
Ce projet de maîtrise a pu être réalisé grâce au soutien et à la précieuse collaboration de plusieurs personnes que je souhaite remercier sincèrement. Tout d’abord, j’aimerais remercier mon directeur de maîtrise, Bradford J. McFadyen, de m’avoir offert ma toute première expérience en recherche 5 ans plus tôt, lors de mes études en physiothérapie. Merci de m’avoir encouragé à poursuivre dans le domaine de la recherche. Ta passion, ta rigueur et la qualité de ton encadrement m’ont permis de développer mon intérêt envers la recherche ainsi que mon sens critique et ma rigueur scientifique. Je tiens également à remercier mon co-directeur, François Routhier. Merci pour ta disponibilité, tes judicieux conseils et également pour la qualité de ta supervision. Un grand merci à vous deux pour votre soutien tout au long de cette maîtrise. Merci pour votre confiance ainsi que pour toutes les belles opportunités que vous m’avez offertes. Cette expérience de recherche fût très enrichissante pour moi et influencera grandement ma pratique en tant que physiothérapeute et également mon parcours futur en recherche. Mes remerciements vont également à Guy St-Vincent pour sa précieuse aide lors des collectes de données et de son assistance lors du traitement de données. Merci à Olivier Doyle pour les supers programmes d’analyse de données.
J'aimerais également remercier tous mes collègues étudiants au CIRRIS qui ont contribué à l’environnement de travail stimulant tout au long de ma maîtrise et avec qui j’ai eu la chance de partager de précieux moments. Un immense merci à mon conjoint Jean-Nicolas qui m’a toujours soutenu dans la réalisation de ma maîtrise et qui a été patient et attentif dans les moments plus difficiles. Merci de m’avoir fait bénéficier de tes judicieux conseils, autant au niveau scientifique que personnel, et ce, peu importe l’heure ! Un grand merci également à mes parents, Martine et Michel, ainsi qu’à ma sœur, Isabelle, pour m’avoir encouragée et soutenue tout au long de mes «études» !
Finalement, ce projet n’aurait pu être réalisé sans la précieuse contribution financière via des bourses d’études à la maîtrise de la part du conseil de recherches en sciences naturelles et en génie du Canada (CRSNG) et du Fond de recherche en Santé du Québec (FRQS).
Avant-propos
Ce mémoire, avec insertion d’article, est divisé en cinq chapitres. Une introduction générale du sujet (chapitre 1) est d’abord présentée, suivie par une description de la méthodologie du projet (chapitre 2). Le chapitre subséquent (chapitre 3) est l’article scientifique, rédigé en anglais, qui est en révision pour le journal Experimental Brain Research. Je suis l’auteure principale de l’article inclus dans ce mémoire, sous la supervision du Dr. Bradford J. McFadyen et du Dr. François Routhier. J’ai participé à la recension des écrits, à l’élaboration du protocole de recherche, au recrutement, à la collecte de données, à l’analyse des résultats et à la rédaction. Les Drs McFadyen et Routhier sont co-auteurs de l’article. Ils ont participé à l’élaboration et à la réalisation du projet, ainsi qu’à l’analyse des résultats. Des résultats supplémentaires sont également présentés (chapitre 4). Finalement, le dernier chapitre est une discussion générale et une conclusion (chapitre 5) afin de présenter les principaux résultats de ce mémoire.
1
Chapitre 1 : Introduction
1.1 Problématique générale
Un important groupe d’utilisateurs de fauteuil roulant sont les individus ayant une lésion de la moelle épinière, représentant plus de 85 000 personnes au Canada (Noonan et al., 2012) et plus de 276 000 personnes aux États-Unis (NSCISC, 2015). L’American National Spinal Cord Injury Statistical Center rapporte qu’approximativement 58% des individus ayant une lésion de la moelle épinière aux États-Unis utilisent un fauteuil roulant dès la première année suivant la lésion; ce taux augmente à près de 80% après 30 années suivant la lésion. Bien que le fauteuil roulant manuel soit le plus fréquemment utilisé, l’utilisation de fauteuil roulant motorisé comme principale aide à la mobilité passe de 22% suite à la lésion à 42% 40 ans après celle-ci (NSCISC, 2015).
La capacité à se déplacer d’un endroit à un autre est essentielle à la réalisation d’activités de la vie quotidienne, telles qu’aller à l’école, à l’épicerie ou occuper un emploi. Ainsi, les usagers de fauteuil roulant doivent être en mesure d’adapter leur locomotion selon les contraintes environnementales, afin de naviguer de façon sécuritaire et efficace dans leur environnement au quotidien. Malgré leurs années d’expérience, les usagers expérimentés en fauteuil roulant manuel rapportent tout de même un niveau de participation sociale plus bas que les personnes ambulatoires (Best, 2014). Une récente étude portant sur la mobilité en fauteuil roulant motorisé chez des usagers expérimentés rapporte que ces derniers déclarent avoir encore des difficultés liées à la mobilité dans leur communauté, entre autres concernant l’évitement d’obstacles statiques et dynamiques (Torkia et al., 2015). Afin de diminuer les difficultés rencontrées durant la locomotion dans la communauté, les auteurs suggèrent d’améliorer l’entraînement des habiletés en fauteuil roulant pour que les usagers puissent mieux anticiper les situations problématiques et mieux planifier l’évitement d’obstacles (Torkia et al., 2015). Afin que les cliniciens puissent mieux enseigner les stratégies anticipatoires lors de la navigation en fauteuil roulant, une meilleure compréhension du contrôle visuo-locomoteur durant des tâches du quotidien (ex. : changement de direction, contournement) est nécessaire.
À ce jour, les études sur la mobilité en fauteuil roulant se sont majoritairement concentrées sur l’évaluation et l’entraînement des habiletés (Kirby et al., 2015; Routhier et al., 2012) et sur la biomécanique de la propulsion en fauteuil roulant manuel (Blouin et al., 2015;
Gagnon et al., 2014; Lalumiere et al., 2014), tandis que les études sur la conduite du fauteuil roulant motorisé ont principalement porté sur les dispositifs d’assistance à la mobilité (ex. : (Cooper et al., 2006; Kairy et al., 2014; Onyango et al., 2016). Toutefois, bien que le contrôle visuo-locomoteur ait été étudié à la marche pour différentes tâches locomotrices (ex. : changement de direction (Grasso et al., 1998; Hollands et al., 2002; Hollands et al., 2001), enjamber et contourner un obstacle (Gerin-Lajoie et al., 2005; Vallis & McFadyen, 2003)), très peu d’études se sont concentrées sur les stratégies visuo-locomotrices en fauteuil roulant. Il est donc surprenant de constater que l’évaluation et l’entraînement des habiletés en fauteuil roulant ainsi que le développement de technologies d’assistance à la navigation n’intègrent pas le comportement naturel visuo-locomoteur des usagers de fauteuil roulant. De plus, en raison des différences liées à la dimension des FR, aux mouvements du corps et au type de propulsion, nous nous attendons à ce que la navigation soit différente entre le FR manuel et motorisé.
Considérant que le nombre d’utilisateurs de fauteuil roulant augmentera au cours des prochaines années et qu’il y a de plus en plus de développement de technologies d’assistance à la navigation pour les fauteuils roulants, une meilleure compréhension des mécanismes visuo-locomoteurs des personnes expérimentées s’avère donc essentielle. L’étude des stratégies de navigation anticipatoires lors de changement de direction et de contournement d’obstacle permettra d’approfondir les connaissances reliées au comportement naturel visuo-locomoteur lors de la navigation en fauteuil roulant.
1.2 Portrait des utilisateurs de fauteuil roulant au Canada et aux
États-Unis
1.2.1 La prévalence des usagers de fauteuil roulant
Au Canada, il est estimé que plus de 285 000 personnes âgées de 15 ans et plus utilisent un fauteuil roulant comme principale aide à la mobilité (Smith et al., 2016), tandis qu’aux États-Unis, ce nombre s’élève à plus de 3,6 millions (Brault, 2012). Puisque ces études n’incluaient pas les personnes institutionnalisées, la prévalence réelle des utilisateurs de fauteuil roulant dans la population globale est susceptible d’être encore plus élevée (Shields, 2004; Smith et al., 2016). Les utilisateurs de fauteuil roulant manuel et motorisé au Canada représentent environ 0,8% de la population âgée de 15 ans et plus (Smith et al., 2016). Cette proportion est plus élevée que dans les études antérieures de
3
prévalence, qui rapportait un estimé à 0,6% de la population autant au Canada (Shields, 2004) qu’aux États-Unis (Kaye et al., 2000). Une des principales raisons de cette augmentation est le vieillissement de la population. En effet, Statistique Canada a rapporté une augmentation de 14,1% des individus âgés de 65 ans et plus entre 2006 et 2011 (Canada, 2012).
1.2.2 Les causes d’utilisation d’un fauteuil roulant
Le fauteuil roulant manuel ou motorisé est fréquemment prescrit chez des individus présentant des limitations importantes à la marche, que ce soit pour pallier à des troubles d’équilibre ou à une perte de fonctions motrices des membres inférieurs par exemple. Parmi les principales conditions de santé ou maladies menant à l’utilisation d’un fauteuil roulant, on y trouve les accidents vasculo-cérébraux, l’ostéoarthrite, la sclérose en plaques et la paraplégie (Kaye et al., 2000). Les raisons d’utilisation d’un fauteuil roulant diffèrent selon l’âge des individus. De façon générale, les études démontrent que l’utilisation d’un fauteuil roulant augmente avec l’âge de la personne, étant le plus prévalent chez les 65 ans et plus et davantage même dans le groupe des personnes âgées de plus de 75 ans (Smith et al., 2016). Chez les personnes âgées, l’utilisation d’un fauteuil roulant semble être davantage associée aux maladies chroniques et au processus de vieillissement naturel (Shields, 2004) tandis que chez les jeunes adultes, la maladie et les blessures/accidents ont été identifiés comme étant les principales raisons de l’utilisation d’un fauteuil roulant comme aide à la mobilité (Kaye et al., 2000; Smith et al., 2016). Ainsi, avec le vieillissement de la population et la chronicisation de certaines maladies, la prévalence des utilisateurs de fauteuil roulant manuel et motorisé sera amenée à croître au cours des prochaines années.
1.3 Portrait des usagers de fauteuil roulant ayant une lésion de
la moelle épinière
1.3.1 La prévalence et l’incidence des lésions de la moelle épinière
Au Canada, on rapporte une prévalence de plus de 85 000 personnes ayant une lésion de la moelle épinière et plus de 3 600 nouveaux cas sont rapportés chaque année (Noonan et al., 2012). Aux États-Unis, plus de 276 000 personnes vivraient avec une lésion de la moelle épinière, avec une incidence estimée à 12 500 cas (NSCISC, 2015). Il est estimé
qu’en 2030, la prévalence de personnes ayant une lésion de la moelle épinière dans la population canadienne augmentera à 121 000 personnes, avec plus de 5 800 nouveaux cas par année (Farry & Baxter, 2010; Noonan et al., 2012). Au Canada, les études rapportent que plus de 51% des lésions de la moelle épinière seraient de cause traumatique (ex. : accident de véhicule moteur, chute, accident de sport, etc.) tandis que 49% sont d’origine non-traumatiques (congénitales, maladie, tumeur, etc.) (Noonan et al., 2012).
1.3.2 Les conséquences d’une lésion de la moelle épinière
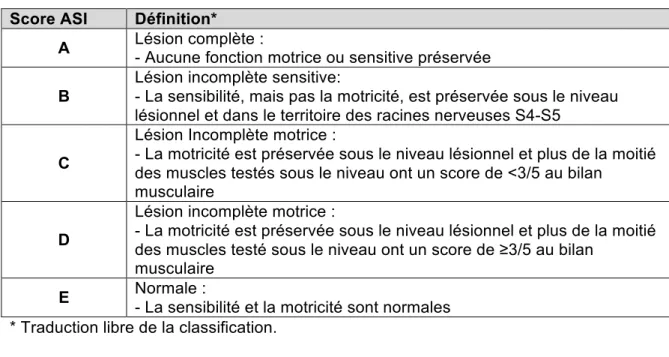
Les conséquences d’une lésion de la moelle épinière varient selon la localisation et la sévérité de la lésion. Une paraplégie se définit comme étant une atteinte à la moelle épinière au niveau de la colonne thoracique (entre T1 et T12) ou à la colonne lombaire (entre L1 et L5) engendrant une diminution ou une perte de fonctions motrices et/ou sensitives au niveau des membres inférieurs et du tronc (Kirshblum et al., 2011). Au Canada, les paraplégies représenteraient environ 56% des lésions de la moelle épinière (Noonan et al., 2012). Une tétraplégie, quant à elle, est une lésion qui se trouve au niveau de la colonne cervicale (entre C1 et C8) et qui atteint la fonction motrice et/ou sensitive des membres supérieurs et inférieurs (Kirshblum et al., 2011). La sévérité de la lésion, c’est-à-dire si elle est complète ou incomplète, aura également une influence sur les fonctions somato-sensorielles et motrices résiduelles. Effectivement, une lésion incomplète signifie qu’une partie de la moelle épinière est épargnée, permettant ainsi une certaine fonction motrice et/ou sensorielle sous le niveau de la lésion, tandis qu’avec une lésion complète, aucune fonction motrice et sensorielle n’est présente sous la lésion (Kirshblum et al., 2011). Le score ASI, soit l’American Spinal Injury Association Impairment Scale, est une échelle qui permet de caractériser le niveau et la sévérité de la lésion de la moelle épinière, où une brève définition des classifications est présentée dans le tableau 1 (Kirshblum et al., 2011).
5
Tableau 1. American Spinal Injury Association Impairment Scale (ASI score; Annexe A) Score ASI Définition*
A Lésion complète : - Aucune fonction motrice ou sensitive préservée B
Lésion incomplète sensitive:
- La sensibilité, mais pas la motricité, est préservée sous le niveau lésionnel et dans le territoire des racines nerveuses S4-S5
C
Lésion Incomplète motrice :
- La motricité est préservée sous le niveau lésionnel et plus de la moitié des muscles testés sous le niveau ont un score de <3/5 au bilan
musculaire D
Lésion incomplète motrice :
- La motricité est préservée sous le niveau lésionnel et plus de la moitié des muscles testé sous le niveau ont un score de ≥3/5 au bilan
musculaire
E Normale :
- La sensibilité et la motricité sont normales * Traduction libre de la classification.
1.3.3 L’utilisation de fauteuil roulant manuel ou motorisé chez les personnes
ayant une lésion de la moelle épinière
Selon l’American National Spinal Cord Injury Statistical Center, il est estimé qu’approximativement 58% des individus ayant une lésion de la moelle épinière aux États-Unis utilisent un fauteuil roulant dès la première année suivant la lésion. Cette proportion augmente à près de 80% après 30 années suivant la lésion. Bien que le fauteuil roulant manuel soit le plus fréquemment utilisé, l’utilisation de fauteuil roulant motorisé comme principale aide à la mobilité augmente jusqu’à 42%, plusieurs années après la blessure (NSCISC, 2015). Cette étude démontre clairement l’importance grandissante du fauteuil roulant manuel et motorisé au cours des années chez les personnes ayant une lésion de la moelle épinière.
1.4 Utilisation au quotidien d’un fauteuil roulant
Tout comme les marcheurs, les usagers de fauteuil roulant manuel et motorisé doivent être en mesure d’adapter leur locomotion en fonction des contraintes environnementales, afin de se déplacer de façon sécuritaire et efficace pour réaliser leurs activités de la vie quotidienne, telles qu’aller à l’école, à l’épicerie ou occuper un emploi. Les études ont démontré qu’une diminution de l’autonomie à la mobilité représente un obstacle majeur à la participation sociale des individus (Noreau & Fougeyrollas, 2009; Riggins et al., 2011).
De plus, les personnes ayant une plus grande indépendance à la mobilité et au transport dans la communauté rapporte avoir une meilleure qualité de vie (Chang et al., 2012). Bien que le seul fait d’acquérir un fauteuil roulant favorise la participation sociale des individus (Salminen et al., 2009), les études ont démontré que les usagers expérimentés en fauteuil roulant manuel ont quand même un niveau de participation sociale plus bas que les personnes ambulatoires (Best, 2014). Ainsi, plusieurs recherches supportent l’utilisation d’un programme d’entraînement des habiletés en fauteuil roulant qui soit validé et standardisé afin d’optimiser la capacité générale de navigation (ou d’utilisation) en fauteuil roulant (Best et al., 2005; MacPhee et al., 2004; Routhier et al., 2012). En effet, l’acquisition et la maîtrise d’habiletés spécifiques en fauteuil roulant manuel est significativement reliée à la participation sociale des individus dans la communauté (Hosseini et al., 2012). Une étude réalisée par Lemay et collègues (2011) a démontré que chez des usagers ayant plus d’un an d’expérience en FR manuel, le fait d’avoir plus d’années d’expériences n’était pas associé avec de meilleures habiletés en FR. Seuls le niveau de la lésion (tétraplégie vs paraplégie) ainsi que l’âge avaient un impact sur les habiletés en FR. Les auteurs ont toutefois conclu que d’autres études étaient nécessaires afin de mieux comprendre la relation entre les habiletés en FR, la confiance d’utiliser le FR ainsi que le niveau de la lésion avec la participation sociale des usagers de FR manuel (Lemay et al., 2011).
Dans une récente étude portant sur la mobilité en fauteuil roulant motorisé, des usagers expérimentés ont rapporté avoir encore des difficultés liées à la mobilité dans leur communauté, entre autres concernant l’évitement d’obstacles statiques et dynamiques (Torkia et al., 2015). Pour diminuer les difficultés rencontrées durant la locomotion dans la communauté, les auteurs suggèrent d’améliorer l’entraînement des habiletés en fauteuil roulant pour que les usagers puissent mieux anticiper les situations problématiques et mieux planifier l’évitement d’obstacles en fauteuil roulant (Torkia et al., 2015). Afin que les cliniciens puissent mieux enseigner les stratégies anticipatoires lors de la navigation en fauteuil roulant, une meilleure compréhension du contrôle visuo-locomoteur durant des tâches du quotidien (ex. : changement de direction, contournement) est nécessaire.
7
1.5 La locomotion adaptative et le système visuel
La locomotion adaptative se définit comme étant une modification des patrons locomoteurs de base en réponse aux contraintes environnementales (Higuchi, 2013; McFadyen & Carnahan, 1997). Lors de la locomotion adaptative, le système nerveux central utilise deux types de stratégies, soit une stratégie réactive utilisée lors de perturbations inattendues dans l’environnement, et une stratégie pré-planifiée ou anticipatoire, afin d’éviter des objets qui sont connus à priori (Higuchi, 2013; Patla, 1995). Lors de la locomotion adaptative, le système visuel joue un rôle très important en fournissant des informations spatiotemporelles sur la trajectoire future désirée et sur les caractéristiques générales de l’environnement par rapport au mouvement du corps. Ce rôle est d’autant plus crucial lors d’une stratégie anticipatoire, car cette dernière est exclusivement basée sur la vision (Higuchi, 2013).
Afin de mieux comprendre comment la vision est utilisée pour contrôler la locomotion, deux grandes théories visuelles ont été émises, soient la théorie du flux optique et la théorie de la direction egocentrique. Tout d’abord, le flux optique est le mouvement apparent des objets et des surfaces d’un environnement visuel sur la rétine engendré par le mouvement relatif de la personne dans l’environnement. Avec la théorie du flux optique, Gibson (Gibson, 1950, 1972) suggérait que lorsqu’une personne se déplace en ligne droite, un patron radial du flux visuel optique se produit avec un foyer d’expansion dans la direction de la locomotion (Warren et al., 2001). Cette théorie stipule que les individus se dirigent vers un but en gardant le foyer d’expansion dans la direction future désirée (Gibson, 1958). Par le flux optique créé par le déplacement du corps dans l’espace, les personnes peuvent extraire de l’information quant à leur direction (Wann & Swapp, 2000; Warren et al., 1991), à leur vitesse de progression (Lackner & DiZio, 1988; Pailhous et al., 1990) et au temps restant avant une collision avec un objet dans l’environnement (Lee, 1976; Lee & Reddish, 1981).
La théorie de la direction egocentrique, quant à elle, suggère que la personne perçoit la direction visuelle du but ou de la finalité du trajet par rapport à son corps, en centralisant le but ou la finalité du trajet avec la ligne médiane du corps (Rushton et al., 1998). Warren et collègues (2001) ont démontré que lorsque les personnes se dirigent vers un but, la locomotion est gouvernée par les deux stratégies (flux optique et direction égocentrique), ce qui, selon les auteurs, permet aux individus d’avoir un contrôle locomoteur robuste
sous différentes conditions environnementales. Toutefois, lorsque l’environnement devient plus détaillé et plus complexe, la stratégie du flux visuel optique est souvent priorisée (Warren et al., 2001). Une meilleure compréhension du comportement visuel lors de la locomotion adaptative (ex. : changer de direction, contourner des obstacles) permettra d’approfondir nos connaissances sur la façon dont la vision est utilisée dans le contrôle adaptif de la locomotion, en fonction du mode de locomotion utilisé (ex. : marche, fauteuil roulant).
1.6 Le contrôle visuo-locomoteur à la marche chez les
personnes sans incapacités
1.6.1 Changement de direction
Chez les personnes sans incapacités, les études démontrent que lors d’un changement de direction, la séquence de réorientation du corps se fait de façon «top-down», c’est-à-dire que la réorientation du corps débute avec une rotation des yeux et de la tête vers la nouvelle direction, suivi par une rotation du tronc et ensuite des pieds (Grasso et al., 1998; Hollands et al., 2002; Hollands et al., 2001; Imai et al., 2001; Patla et al., 1991; Pradeep Ambati et al., 2013). Cette stratégie «top-down» a été observée pour différents angles de changement de direction, incluant tourner un coin de 90°, dont l’initiation du changement de direction était déclenchée par des stimuli visuels ou auditifs. Le mouvement anticipatoire de la tête vers la nouvelle direction est reconnu comme étant un élément important dans la préparation et la pré-programmation des adaptations des patrons locomoteurs, qui est réalisé lors des deux pas précédents la déviation de la trajectoire (Hollands et al., 2002; Patla et al., 1991). Ce mouvement anticipatoire de la tête fournirait un cadre de référence allocentrique au système nerveux central qui permettrait la réorientation subséquentes des segments du corps (Hollands et al., 2001) et permettrait de diriger la locomotion vers la nouvelle direction (Hicheur et al., 2005). De plus, les études sur la locomotion adaptative ont démontré des caractéristiques communes du comportement visuel, soit que la majorité des fixations visuelles sont dirigées vers la trajectoire future ou sur un objet d’intérêt dans l’environnement (Higuchi, 2013; Hollands et al., 2002). Finalement, avant l’initiation du changement de direction, les individus font invariablement une saccade oculaire vers l’aspect final de la nouvelle trajectoire, permettant ainsi l’identification et l’extraction d’informations importantes concernant la trajectoire future (Hollands et al., 2002).
9
1.6.2 Contournement d’obstacle
Bien que la tâche de contournement d’obstacle partage des similitudes avec la trajectoire de changements de direction, le contrôle locomoteur s’avère très différent. Effectivement, les études démontrent que les personnes sans incapacités adoptent une stratégie de réorientation du corps «en bloc», c’est-à-dire qu’il y a une initiation simultanée de la tête et du tronc avant le contournement d’obstacle (Vallis & McFadyen, 2003). Les auteurs proposent que cette stratégie faciliterait un changement plus contrôlé et transitoire de la déviation de la trajectoire et augmenterait la stabilité de la navigation (Vallis & McFadyen, 2003). Les différences observées dans les ajustements locomoteurs entre le changement de direction et le contournement d’obstacle suggèrent donc que la coordination des segments du corps durant la locomotion est spécifique à la tâche et serait relié au but de la tâche et aux contraintes environnementales présentes.
L’étude de Gérin-Lajoie et collègues (2005) a démontré que les ajustements locomoteurs anticipatoires permettant la déviation de la trajectoire débutaient dès que les participants commençaient à marcher, avec un second ajustement plus prononcé à environ 1,5 mètres avant l’obstacle. Les ajustements locomoteurs anticipatoires diffèrent toutefois si l’obstacle est statique ou en mouvement. Effectivement, en présence d’obstacles en mouvement, les personnes ont tendances à réduire leur vitesse, à raccourcir leur longueur de pas et à avoir une déviation du centre de masse dans le plan médio-latéral qui est retardée par rapport au contournement d’obstacle statique (Gerin-Lajoie et al., 2005). Une explication possible est que de juger de la possibilité d’une collision avec un obstacle en mouvement est plus difficile que de faire une telle évaluation par rapport à un obstacle statique (Cutting et al., 1995). Les résultats de l’étude par Gérin-Lajoie et collègues (2005) ont bien démontré la nature anticipatoire de la tâche navigationnelle de contourner des obstacles, contrairement à ce que suggérait Fajen & Warren (2003). En effet, ces derniers rapportaient que la navigation avec contournement d’obstacle vers un but n’était pas explicitement planifiée, mais évoluait plutôt au fur et à mesure que la personne navigue dans l’environnement, en fonction de l’angle et de la distance entre la personne, les obstacles et le but final de la tâche (Fajen & Warren, 2003).
1.7 Le contrôle visuo-locomoteur en fauteuil roulant
Les prochaines sections recensent les écrits sur le contrôle visuo-locomoteurs en fauteuil roulant manuel et motorisé lors de changement de direction. À notre connaissance, les ajustements locomoteurs anticipatoires n’ont pas été étudiées lors de contournement d’obstacle, autant en fauteuil roulant manuel que motorisé.
1.7.1 Fauteuil roulant manuel
Higuchi et ses collègues ont étudié la navigation en fauteuil roulant manuel et l’ont comparé à la locomotion bipède par rapport à la perception et à la capacité à traverser un cadre de porte (Higuchi et al., 2006; Higuchi, Hatano, et al., 2009; Higuchi et al., 2004). Ils ont démontré que les sujets sans incapacités sous-estimaient leurs exigences spatiales en lien avec le fauteuil roulant, et ce, même après des séances d’entraînement en fauteuil roulant (Higuchi et al., 2004). Ils ont également démontré que les personnes ayant une tétraplégie avaient un bon jugement à savoir si une porte était passable ou non avec leur propre fauteuil roulant manuel et avec un fauteuil qui leur était non-familier (Higuchi, Hatano, et al., 2009). Les auteurs ont conclu que l’adaptation à des dimensions altérées du corps était susceptible de se produire très rapidement, mais sous une forme de locomotion familière (Higuchi, Hatano, et al., 2009; Higuchi et al., 2004). De plus, lors de la propulsion en fauteuil roulant manuel, les sujets sans incapacité avaient tendances à fixer davantage le cadre de porte comparativement lors de la locomotion bipède, suggérant que la nouveauté du mode de locomotion induirait une plus grande préoccupation chez les participants pour éviter une collision avec la porte (Higuchi, Cinelli, et al., 2009). Plus récemment, Charette et collègues (2015) ont comparé la marche et la locomotion en fauteuil roulant manuel chez des personnes sans incapacités lors de changements de direction. Ils ont démontré qu’autant à la marche que lors de la navigation en fauteuil roulant, les participants utilisaient une stratégie «top-down», avec une rotation de la tête qui initiait la réorientation du corps lors d’un changement de direction, ce qui concorde avec la littérature actuelle chez les sujets sans incapacités à la marche. Par contre, ces utilisateurs novices en FR ont réalisé un contre-mouvement avant d’initier la déviation de la trajectoire vers la cible en bout de parcours. Chez ces personnes novices en FR, le contre-mouvement a été lié à l’adoption d’un comportement plus sécuritaire, puisqu’il amène un plus grand dégagement entre le FR et la tige verticale utilisée comme indicateur du changement de direction. Par contre, nous ne savons pas si cette stratégie de
contre-11
mouvement est également utilisée chez les utilisateurs expérimentés en FR manuel et motorisé.
1.7.2 Fauteuil roulant motorisé
À notre connaissance, aucune étude sur le contrôle visuo-locomoteur n’a été réalisée auprès des usagers de fauteuil roulant motorisé proprement dit. Les études se sont plutôt intéressées aux fauteuils roulants dits intelligents ou automatiques (ex. : avec des systèmes de détection d’objets pour l’évitement d’obstacles) (Kairy et al., 2014; Nguyen et al., 2011; Nguyen et al., 2014). Toutefois, une récente étude ayant pour objectif de développer un algorithme pour un contrôle automatique de la locomotion s’est basé sur le comportement naturel de participants avant d’élaborer leur modèle (Onyango et al., 2016). Par contre, la méthodologie utilisée limite les conclusions qu’on puisse en tirer sur le comportement navigationnel naturel des usagers en fauteuil roulant motorisé. Effectivement, les résultats sont basés sur sept participants âgés entre 26 à 74 ans, où seulement trois d’entre eux étaient expérimentés en fauteuil roulant motorisé, et dont l’étude était réalisée dans un contexte de réalité virtuelle (Onyango et al., 2016).
1.8 Le contrôle visuo-locomoteur lors de la conduite automobile
Bien qu’ils ne soient pas exposés aux contraintes environnementales d’une route dans un contexte à haute vitesse, les fauteuils roulants manuel et motorisé sont des véhicules sur roues qui peuvent potentiellement impliqués un comportement visuel et navigationnel de base similaire à celui de la conduite automobile. Pour cette raison, il est intéressant de recenser les écrits sur le comportement visuo-locomoteur lors de la conduite automobile, afin de la comparer à celui du fauteuil roulant manuel et motorisé.
Land & Lee (1994) ont étudié le comportement visuel lors de la conduite automobile dans une courbe et ont proposé la stratégie du «Tangent point» (TP). Cette stratégie suggère que les conducteurs fixent le point de tangente de la courbe de la route une à deux secondes avant de tourner. La fixation du TP permettrait d’obtenir de l’information concernant la géométrie de la courbe (Land & Lee, 1994). Par contre, de récentes études ont questionné la généralisation du modèle du TP et proposent plutôt le modèle du «future path», basé sur l’hypothèse que les conducteurs repèrent des points cibles sur la route vers lesquels ils souhaitent diriger leur trajectoire (Wann & Land, 2000). Wilkie et collègues ont également proposé une théorie plus générale, soit la théorie du regard actif
(«active gaze theory»), qui stipule que les personnes regardent où elles veulent aller et soutiennent que le TP est un point sur la trajectoire future, sans nécessairement représenter le point d’intérêt (Wilkie et al., 2008). Finalement, avant de tourner dans une courbe, il a été rapporté que les automobilistes faisaient un contre-mouvement (ou une déviation contra-latérale) à la direction de la courbe lorsqu’ils fixaient une cible sur la trajectoire future à l’intérieur de la courbe (Mars, 2008). Une hypothèse émise par cet auteur est que le fait de fixer l’intérieur de la courbe pourrait avoir donner l’impression aux sujets qui tournaient plus que requis («oversteering»), et donc que les sujets n’auraient pas couper ou longer la courbe («cut the bend») tel qu’ils le font lorsqu’ils n’ont pas de contraintes de fixations visuelles durant la tâche (Mars, 2008).
1.9 Limitations des études actuelles
Cette recension des écrits démontre bien que la littérature sur le contrôle visuo-locomoteur en fauteuil roulant manuel et motorisé est assez restreinte. Notre compréhension actuelle du contrôle visuo-locomoteur utilisé par les usagers de fauteuil roulant manuel et motorisé durant des tâches du quotidien est actuellement limitée. Il est également surprenant de constater que l’évaluation et l’entraînement des habiletés en fauteuil roulant, ainsi que le développement de technologies d’assistance à la navigation en fauteuil roulant, ne semblent pas basés sur le contrôle naturel visuo-locomoteur des personnes expérimentées en fauteuil roulant.
Initialement, les fauteuils roulants intelligents étaient limités à quelques individus ayant d’importantes incapacités physiques, visuelles et/ou cognitives. Toutefois, l’étude réalisée par Simpson et collègues en 2008 a estimé qu’entre 61 à 91% des usagers de fauteuil roulant pourraient bénéficier de la technologie de fauteuil roulant intelligents à certains moments de leur vie ou pour certaines tâches du quotidien (Simpson et al., 2008). Avec l’intérêt et le besoin grandissant envers la technologie d’assistance à la navigation, une meilleure compréhension du comportement naturel visuo-locomoteur des individus expérimentés en fauteuil roulant est importante afin de mieux cibler les besoins de la clientèle et de soutenir le développement et la conception de ces nouvelles technologies.
13
1.10 Objectifs et hypothèses
L’objectif principal de ce projet est de comparer les stratégies de navigation visuo-locomotrices chez des personnes ayant une lésion de la moelle épinière utilisant un fauteuil roulant manuel ou motorisé lors de changements de direction et de contournement d’obstacle. L’objectif secondaire est d’explorer l’effet de l’expérience en fauteuil roulant manuel ou motorisé sur les stratégies visuo-locomotrices. L’expérience sera qualifiée par le nombre d’années d’utilisation du fauteuil roulant, par le niveau des habiletés en fauteuil roulant ainsi que par le niveau de confiance à utiliser le fauteuil roulant dans différents contextes du quotidien.
Basé sur le fait que la stratégie «top-down» de la coordination est très dominante à la marche bipède, et qu’elle est également observée chez les usagers novices en FR, nous avons émis l’hypothèse que les usagers expérimentés en FR manuel et motorisé vont démontrer une coordination temporelle du corps et du FR similaire en fonction de la tâche locomotrice. Par contre, en raison des différences liées à la dimension des FR, aux mouvements du corps et au mode de propulsion entre les deux types de FR, nous émettons l’hypothèse qu’un contrôle anticipatoire de la trajectoire (point de déviation et contre-mouvement), en plus d’un comportement visuel seront différents entre le FR manuel et le motorisé, en fonction de la tâche locomotrice. De plus, nous croyons que l’expérience en fauteuil roulant aura une influence sur le contrôle anticipatoire (initiation de la déviation de la trajectoire), mais pas sur la coordination temporelle du corps et du fauteuil roulant.
Chapitre 2 : Méthodologie générale
2.1 Population et recrutement
La population cible à l’étude était les personnes ayant une lésion de la moelle épinière utilisant un fauteuil roulant manuel ou motorisé comme principale aide à la mobilité. Ce projet de recherche s’est concentré uniquement sur les personnes ayant une lésion de la moelle épinière car elles représentent un groupe important d’usagers de fauteuil roulant et étant considéré cliniquement comme ayant de bonnes habiletés en fauteuil roulant en général.
2.2 Critères d’inclusion et d’exclusion des participants
Les participants devaient être âgés entre 18 et 60 ans, utiliser un fauteuil roulant manuel ou motorisé comme principale aide à la mobilité (depuis plus de 12 mois et pour plus de 5 heures/jour), et avoir une paraplégie (lésion entre T1-T12) pour les usagers de fauteuil roulant manuel ou une tétraplégie ou paraplégie (lésion entre C3-T12) pour les usagers de fauteuil roulant motorisé après l’âge de 15 ans. Pour les usagers de fauteuil roulant manuel, la propulsion devait se faire de façon bi-manuelle et le fauteuil roulant devait avoir un cadre rigide. Pour les usagers en fauteuil roulant motorisé, le contrôle du fauteuil roulant devait se faire de façon manuelle avec une manette (joystick). Les critères d’exclusion étaient : 1) Avoir de la douleur aux épaules (cotation sur l’échelle visuelle analogue > 3/10) ou autre(s) problème(s) musculo-squelettique(s) aux membres supérieurs pouvant entraver la propulsion, 2) Avoir subi un traumatisme crânien (léger, modéré ou sévère) au cours des 12 derniers mois, 3) Avoir une maladie neurologique ou dégénérative (ex. : sclérose en plaques, accident vasculo-cérébral), 4) Avoir un problème de vision non-corrigé (résultat au test de Snellen < 20/20) ou autre problème oculaire (ex. : strabisme), 5) Avoir une limitation d’amplitude articulaire cervical (rotation cervicale < 55°) et 6) porter des lunettes (le port de verres de contact était accepté). Chez les personnes intéressées à participer à l’étude, les critères d’éligibilités étaient vérifiés lors d’une entrevue téléphonique par l’étudiante à la maîtrise, avant de planifier la collecte de données en laboratoire.
15
2.2.1 Recrutement des participants
Un échantillon de 12 usagers de fauteuil roulant manuel et 10 usagers de fauteuil roulant motorisé a été recruté selon les critères d’éligibilité précédemment décrits, sur une période s’échelonnant d’avril 2015 à mai 2016. Les participants ont été recrutés de deux façon: 1) via une liste de participants d’études antérieures réalisées par le co-directeur du projet actuel (François Routhier) ayant consentis à être sollicités pour d’autres projets de recherche et 2) à partir d’une liste de patients de deux ergothérapeutes travaillant dans des centres de réadaptation de la région de Québec (Centre intégré universitaire de santé et de services sociaux de la Capitale-Nationale (CIUSSS-CN) site de l’Institut de réadaptation en déficience physique de Québec (IRDPQ) et Centre intégré de santé et de service sociaux de Chaudière-Appalaches (CIUSS-CA) site du Centre de réadaptation en déficience physique de Chaudière-Appalaches (CRDP-CA)). Ces deux professionnels communiquaient avec les participants potentiels par téléphone afin de vérifier leur intérêt à recevoir plus d’informations sur le projet de recherche par l’étudiante à la maîtrise.
2.3 Procédures d’évaluation en laboratoire
Les participants ont pris part à une séance d’évaluation en laboratoire d’une durée approximative de 2,5 heures au Centre interdisciplinaire de recherche en réadaptation et intégration sociale (CIRRIS). Ce projet de recherche a été approuvé par le Comité d’éthique de la recherche de l’Institut de réadaptation en déficience physique de Québec (IRDPQ), du CIUSSS-CN. À leur arrivée au laboratoire, les participants devaient signer le formulaire de consentement au projet (Annexe B). Par la suite, la longueur et la largeur du tronc ont été mesurées avec un ruban à mesurer et l’amplitude articulaire cervicale a été évaluée avec l’appareil cervical range-of-motion, qui consiste en un système d’inclinomètres et d’aimants. L’acuité visuelle a ensuite été évaluée avec l’échelle de Snellen. Un résultat de 20/20 devait être atteint pour avoir une acuité visuelle normale ou corrigée à la normale avec le port de lentilles. Un questionnaire visant à recueillir les données sociodémographiques des participants a été administré par l’évaluateur (Annexe C). Ensuite, deux questionnaires auto-administrés (versions francophones) étaient complétés par le participant.
2.3.1 Questionnaires auto-administrés
2.3.1.1 Questionnaire WST-Q
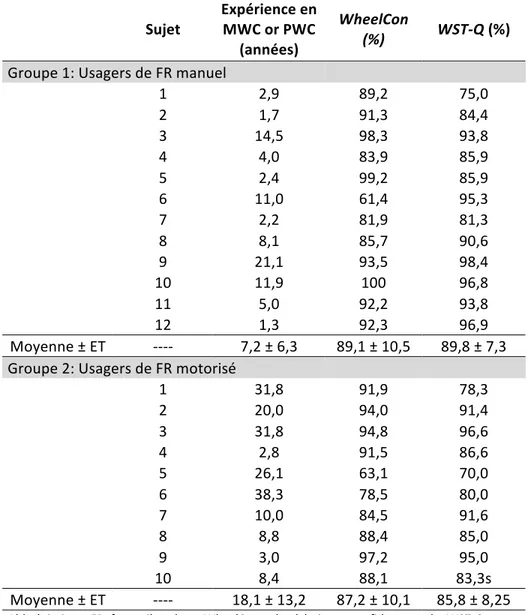
Le Wheelchair Skills test version questionnaire (WST-Q version 4.2) (Site web : http://www.wheelchairskillsprogram.ca) évalue la capacité des usagers à effectuer des habiletés en fauteuil roulant manuel (32 habiletés) ou motorisé (30 habiletés). Pour chaque habileté, les participants devaient indiquer leur capacité ou non à effectuer les habiletés selon trois cotations possibles : oui (2 points), oui, mais avec difficulté (1 point) ou non (0 point) (Annexe D). Ils devaient également évaluer leur performance, c’est-à-dire à quelle fréquence ils effectuaient chaque habileté, soit au moins une fois par jour (4 points), par semaine (3 points), par mois (2 points), par année (1 point) ou jamais (0). Une moyenne des scores en pourcentage était ensuite calculée pour la capacité ainsi que pour la performance. Un pourcentage élevé indique une capacité ou une performance élevée. Le questionnaire WST est fortement corrélé avec le test d’Évaluation objective des habiletés en fauteuil roulant pour le fauteuil roulant manuel (r=0,89) (Rushton et al., 2012) et pour le fauteuil roulant motorisé (r=0,65) (Rushton et al., 2014). Une bonne fidélité test-retest a également été démontré pour ce questionnaire (ICC= 0,78) (Rushton et al., 2014). 2.3.1.2 Questionnaire WheelCon
Le Wheelchair use confidence scale (WheelCon) est un questionnaire qui comporte 65 situations pour le fauteuil roulant manuel (version française 3.0) (Rushton et al., 2011) et 59 pour le fauteuil roulant motorisé (version française 1.0) (Rushton et al., 2015) où les usagers doivent évaluer leur niveau de confiance à accomplir la tâche de manière indépendante et sécuritaire, sur une échelle de 0 à 100 (Annexe E). La moyenne du niveau de confiance (0-100) de chaque situation est calculée, où un score élevé indique une confiance élevée. Le questionnaire Wheelcon version française pour les usagers en fauteuil roulant manuel a démontré une bonne validité et une excellente fidélité test-retest (ICC=0,87) (Rushton et al., 2015). Les qualités métrologiques de ce questionnaire pour les usagers en fauteuil roulant motorisé n’ont pas encore été rapportées.
17
2.3.2 Préparation du participant
2.3.2.1 Installation du matériel de capture du mouvement tridimensionnelle
Un système de capture du mouvement tridimensionnelle (4 caméras Optotrak Certus, Northern Digital Inc., Waterloo, Canada, précision 0,01 mm) a été utilisé pour évaluer la cinématique, à une fréquence d’échantillonnage de 120 Hz. Cinq triades de marqueurs infrarouges non-colinéaires étaient installées sur la tête, le tronc (sous la fourchette sternale), les deux avant-bras et sur le cadre du fauteuil roulant. Le marqueur de la tête était fixé sur un casque. Une fois l’installation des marqueurs complétée, une calibration d’une durée d’une seconde était réalisée pendant que le participant maintenait une position neutre statique (position assise dans son fauteuil roulant, tête et tronc maintenu le plus droit possible avec les membres supérieurs collés sur le fauteuil roulant, la paume des mains face aux roues arrières). Par la suite, des points anatomiques ont été sondés pour avoir une meilleure représentativité de la position du corps dans l’espace (Annexe F). 2.3.2.2 Installation du matériel de capture du mouvement oculaire
Les données sur le comportement visuel ont été collectées par un système de mesure du mouvement oculaire de l’œil droit (Mobile Eye XG eye tracker, Applied Science Laboratories, Bedford, Massachussets, précision 0,5-1°) à une fréquence d’échantillonnage de 30 Hz. Ce système était synchronisé avec le système Optotrak. La lunette (78 g) consistait en deux caméras numériques hautes définitions : une caméra qui enregistre l’image de la scène (l’environnement) et la seconde qui enregistre les mouvements de l’œil droit du participant. Ces deux images étaient ensuite intégrées dans un enregistrement vidéo où sont superposé la scène et les mouvements de l’œil droit (curseur rouge, voir figure 1). Dans la figure 1, le cercle violet représente la position de la pupille, la croix violette est la réflexion de la cornée et le vecteur violet joint la réflexion de la cornée au centre de la pupille. Une fois la lunette installée, une calibration était réalisée en demandant au participant de fixer neufs points sur une grille (30 cm entre chaque points, plan frontal) en étant assis dans son fauteuil roulant à une distance d’environ 2,5 m de la grille. La précision de la calibration était vérifiée en demandant au participant de fixer à nouveau chacun des neufs points de la grille. Si un des points ne se retrouvait pas au centre du curseur, la calibration était reprise. Durant l’expérimentation, la vidéo était continuellement surveillée afin de détecter les problèmes potentiels.
2.3.3 Protocole expérimental
Les participants devaient réaliser trois conditions expérimentales dans leur propre fauteuil roulant à une vitesse naturelle et confortable: 1) se déplacer en ligne droite sur une distance de 8 mètres (la condition nommée LD), 2) changer de direction de 45° vers la droite à partir d’un trajectoire rectiligne, indiqué par une tige verticale (hauteur = 1,86 m; diamètre = 3,5 cm) situé à 3,6 mètres du point de départ (la condition nommée CD) et 3) contourner un obstacle (hauteur = 1,83 m ; diamètre = 43 cm) par la droite situé à 3,6 mètres du point de départ (la condition nommée CO). Tous les sujets débutaient par la condition LD, tandis que les conditions CD et CO étaient contrebalancées entre les participants. Pour les trois conditions, les participants étaient tenus de manœuvrer leur fauteuil roulant vers une cible située à la fin de chaque parcours. Un court corridor (largeur : 0,92 m; longueur : 1,85 m) était installé au point de départ dans le but d’encourager une zone d’accélération du fauteuil roulant en ligne droite. Cinq essais étaient complétés par condition (Annexe G pour voir la feuille de collecte de données).
2.4. Procédures d’analyse
2.4.1 Traitement des données
Les données cinématiques collectées par le système Optotrak ont été interpolées par un programme maison développé avec MatLab (MathWorks Inc., MA, Etats-Unis). Les données ont ensuite été filtrées avec un filtre de type Butterworth passe-bas de 4ième ordre à double passage, à une fréquence de coupure à 6 Hz. Les données recueillies par le
Figure 1. Image tirée d’un enregistrement vidéo du Eye Tracker présentant le point de regard d’un participant (curseur rouge) dans l’environnement.
19
Mobile Eye XG ont été codées en utilisant le logiciel Physmo Video Motion (30 Hz), qui permet une analyse image-par-image du comportement visuel pour chaque essai. Cette codification s’est fait en utilisant le logiciel Excel.
2.4.2 Variables dépendantes
Les variables dépendantes ont été regroupées en trois catégories. Le comportement navigationnel a été évalué par : 1) la vitesse moyenne vers l’avant du point milieu du fauteuil roulant, 2) le dégagement minimal (plus petite distance en centimètres entre le corps ou le fauteuil roulant et la tige verticale ou l’obstacle), et 3) le premier et deuxième (si présent) point de déviation de la trajectoire du point milieu du fauteuil roulant, en relation avec la condition LD, calculé comme étant le temps avant de franchir la tige verticale ou l’obstacle. De plus, la présence ou non d’un contre-mouvement a été quantifié. La coordination temporelle a été évaluée par : 4) la coordination temporelle des déviations angulaires des yeux, de la tête, du tronc et du fauteuil roulant vers la nouvelle direction, calculé en temps avant de franchir la tige vertical ou l’obstacle, et 5) le temps relatif mesuré par la différence entre la coordination temporelle entre les yeux et la tête, la tête et le tronc, et le tronc et le fauteuil roulant. Basé sur les travaux de Hollands et collègues (Hollands et al., 2002), le comportement visuel a été divisé en quatre grands comportements, soient : a) les fixations dirigées sur la tige verticale ou l’obstacle, la cible, le plancher ou autres éléments de l’environnement, b) les saccades, c) les mouvements des yeux avec la tête, incluant les fixations de déplacements et les mouvements de la tête, puis d) les données manquantes. Une description plus détaillée de chaque comportement visuel se trouve au tableau 2. Chaque comportement visuel était rapporté en pourcentage du comportement visuel total et les valeurs moyennes des essais selon la condition ont été calculées. Toutes ces variables dépendantes ont été analysées durant la phase d’approche des trois conditions, soit à partir de la position de départ (début du corridor) des sujets jusqu’au point de croisement de la tige verticale ou de l’obstacle, à l’exception de la variable vitesse moyenne du fauteuil roulant où la zone d’accélération à l’intérieur du corridor était exclus des calculs.
Tableau 2. Description de la variable comportement visuel
Catégories et comportements Description Durée
a. Fixations
1.1 Tige verticale ou obstacle
Stabilisation du regard sur un objet ou un endroit dans l’environnement. ≥ 3 échantillons (99.9 msec) 1.2 Cible 1.3 Plancher 1.4 Autres éléments de l’environnement b. Saccades Mouvement(s) rapide(s) entre deux endroits ou objets dans
l’environnement.
__
c. Mouvements des yeux avec la tête
3.1 Fixation de déplacement
Stabilisation du regard à une distance constante sur le plancher en avant du sujet et dont le point de regard se déplace avec le sujet. ≥ 3 échantillons (99.9 msec) 3.2 Mouvement de la tête
Les yeux et la tête tournent
simultanément. __
d. Données manquantes
4.1 Clignement des
yeux Absence du curseur rouge __
4.2 Comportement indéterminé
Comportement qui ne concorde dans aucune catégorie décrite ci-haut
__
2.4.3 Procédures statistiques
Tout d’abord, des analyses descriptives (moyennes et écart-types) ont été réalisées pour toutes les variables dépendantes ainsi que pour les variables sociodémographiques et les résultats aux questionnaires WST et WheelCon. Des tests-T ont été utilisés afin de comparer les caractéristiques sociodémographiques de nos deux échantillons. Pour l’objectif principal, un ANOVA à mesures répétées a été utilisé pour analyser la vitesse [2 groupes x 3 conditions], le dégagement minimal et le point de déviation initial de la trajectoire [2 groupes x 2 conditions pour ces deux variables], la coordination temporelle [2
21
groupes x 2 conditions x 4 segments] et le comportement visuel [2 groupes x 3 conditions x 6 comportements visuels]. Un test-T a été utilisé pour une comparaison simple pour la variable du temps relatif de la coordination du corps. Pour la présence du contre-mouvement, un test à 2 échantillons pour l’égalité des proportions a été utilisé pour comparer les groupes. Trois usagers en fauteuil roulant manuel et un en fauteuil roulant motorisé avaient des mouvements oculaires trop angulés pour le système Mobile Eye XG, résultant en un nombre important de données manquantes. Ainsi, nous avons exclus ces sujets des analyses descriptives et statistiques pour les trois variables dépendantes impliquant des données visuelles, soient la coordination temporelle, le temps relatif et le comportement visuel. De plus, lors de l’acquisition des données, nous avons réalisé qu’il n’y avait pas de mouvements des yeux vers la nouvelle direction lors du contournement d’obstacle pour tous les participants. Ainsi, des ANOVAS à mesures répétées ont été réalisées séparément pour les deux conditions, soit pour le CD [2 groupes x 4 segments] et pour le CO [2 groupes x 3 segments].
Pour l’objectif secondaire, qui vise à évaluer l’expérience sur le contrôle visuo-locomoteur sous-jacent à la navigation en fauteuil roulant, des corrélations de Pearson ont été utilisées pour analyser l’effet des années d’expérience, des habiletés perçus en fauteuil roulant (WST) et de la confiance d’utiliser le fauteuil roulant (WheelCon) sur les différentes variables dépendantes. Le logiciel SPSS (version 23.0) a été utilisé pour réaliser les tests statistiques, avec un niveau de signification établi à 0,05.
Chapitre 3 : Article 1
3.1 Résumé
Introduction. Les fauteuils roulants (FR) manuels ou motorisés sont fréquemment utilisés chez les personnes ayant une lésion de la moelle épinière pour assister la mobilité. Pourtant, le contrôle visuo-locomoteur sous-jacent à la navigation en FR chez les usagers expérimentés n’est pas bien compris à ce jour et est nécessaire afin de mieux informer les cliniciens pour soutenir l’entraînement des habiletés en FR ainsi que le développement des technologies d’assistance à la navigation.
Objectif. L’objectif de cette étude était de comparer le contrôle visuo-locomoteur en FR manuel et motorisé chez des sujets ayant une lésion de la moelle épinière lors de changement de direction et de contournement d’obstacle.
Méthodes. Les participants ayant une lésion de la moelle épinière utilisant un FR manuel (n=12, 38,5±10,7 ans) ou motorisé (n=10, 47,8±8,6 ans) devaient manœuvrer leur FR à une vitesse naturelle en ligne droite, lors de changement de direction de 45° vers la droite et lors de contournement d’obstacle vers la droite. La vitesse, le dégagement minimal du corps, le point de déviation, la coordination temporelle du corps, le temps relatif de la coordination temporelle entre les segments et le comportement visuel ont été analysés. Résultats. Aucun effet majeur de groupe n’a été trouvé pour la vitesse, le dégagement minimal et le point de déviation. Lors du changement de direction, la tête initiait toujours la réorientation du corps et du FR tandis que lors du contournement d’obstacle, une stratégie «en bloc» a été utilisée par les deux groupes. Lors de la navigation en ligne droite, les participants fixaient principalement la cible finale. Durant le changement de direction et le contournement d’obstacle, les participants fixaient davantage la trajectoire future et les obstacles pour les deux modes de locomotion.
Conclusion. Les usagers en FR manuel et motorisé adoptent des stratégies navigationnelles et une coordination temporelle visuo-locomotrice similaire lors de changement de direction et de contournement d’obstacle. Le comportement visuel spécifique dépend des exigences environnementales. Les études futures devraient regarder des tâches locomotrices plus complexes (ex. : avec des obstacles en mouvement).
23
3.2 Article
Visuo-locomotor control in persons with spinal cord injury in a manual or power wheelchair for direction changes and obstacles circumvention
Caroline Charette, PT1,2, François Routhier, PEng, PhD1,2, Bradford J. McFadyen, PhD1,2
1. Centre for Interdisciplinary Research in Rehabilitation and Social Integration (CIRRIS), Institut de réadaptation en déficience physique de Québec, CIUSSS-CN, Quebec, Canada 2. Faculty of Medicine, Departement of Rehabilitation, Université Laval, Quebec, Canada
Corresponding author:
Bradford J. McFadyen, PhD, CIRRIS, 525 Boul. Wilfrid-Hamel, Quebec, Canada, G1M 2S8, Email: brad.mcfadyen@fmed.ulaval.ca, Tel.: 1-418-529-9141 x6584
3.2.1 Abstract
Background. Manual (MWC) or power (PWC) wheelchairs are frequently used in individuals with a spinal cord injury (SCI) to assist mobility. Yet, visuo-locomotor control underlying WC navigation in experienced users is not well understood and necessary to better inform WC skills training as well as the development of assistive navigation technologies.
Objective. The objective was to compare the visuo-locomotor control for MWC and PWC in subjects with SCI while changing direction and circumventing an obstacle.
Methods. Participants with SCI using a MWC (n=12, 38.5±10.7y) or a PWC (n=10, 47.8±8.6y) were asked to maneuver at self-selected speed straight ahead, while changing direction 45° to the right, and while circumventing an obstacle to the right. Speed, minimal clearance, point of deviation, temporal body and WC coordination, relative timing of segment rotations and visual behavior were analysed.
Results. There was no main effect of group for speed, clearance and point of deviation. During direction changes, the head always lead body and wheelchair reorientation while an ‘en bloc’ strategy was used for circumventing obstacles for both groups. In straight-ahead locomotion, participants predominantly fixed their gaze on the end target. During direction changes and obstacle circumvention, participants fixated more on the future path and the obstacle for both WC modes.
Conclusions. MWC and PWC users adopt similar navigational strategies and visuo-locomotor coordination while changing direction and circumventing obstacles. Specific gaze behavior depends on environmental demands. Future studies should look at more complex WC locomotor tasks (e.g., with moving obstacles).