Amélioration des performances des systèmes
d’imagerie panoramiques et Panomorphes
Thèse
Martin Larivière Bastien
Doctorat en physique
Philosophiæ doctor (Ph. D.)
Québec, Canada
III
Résumé
En raison de leur grand champ de vue, les systèmes d’imagerie panoramiques et Panomorphes sont des cas particuliers du point de vue de la conception optique. Le champ de vue élevé introduit une quantité importante d’aberrations qui doivent être corrigées. Pour obtenir la qualité d’image voulue, les aberrations sont minimisées par l’optimisation de certaines composantes physiques. Cette approche a cependant ses limites. Ce projet a donc pour but d’explorer d’autres techniques qui permettront de dépasser ces limites. Trois types de techniques sont étudiés : les techniques matérielles, logicielles et hybrides.
Dans la section des techniques matérielles, le senseur courbé et les lentilles de champ de forme libre sont étudiés. Il est démontré qu’avec ces techniques, il est possible de créer l’effet de meilleur foyer sur toute l’image. De plus, le senseur courbé permet la conception de systèmes monocentriques qui permettent une conception plus simple et des performances accrues.
La section des techniques logicielles montre les gains qu’il est possible d’obtenir par le traitement d’image. Malgré la variation importante de la PSF, la déconvolution réussit à améliorer la qualité de l’image en général. La correction de la couleur latérale amène une amélioration complémentaire à la déconvolution. Les deux méthodes sont suffisamment rapides pour envisager une application vidéo.
La dernière section présente une technique appelée encodage de front d’onde. Deux méthodes d’optimisation sont présentées, l’optimisation par la MTF et par la variance entre l’image et l’objet. L’optimisation par la variance nécessite plus de temps de calcul, mais considère l’étape de la reconstruction et le bruit, et donne donc de meilleurs résultats. Des simulations sont aussi effectuées pour comparer l’efficacité et le domaine d’application de deux types de masques. Il est montré que le masque cubique est plus efficace pour corriger le défocus et l’astigmatisme et que le masque quartique est plus efficace en présence de coma et de bruit blanc gaussien.
En utilisant les informations acquises lors des simulations, un prototype basé sur la lentille IMV1 d’ImmerVision a été fabriqué. Le masque cubique fabriqué présente cependant une rugosité de surface trop importante et les images obtenues sont affectées par le bruit.
V
Abstract
Because of their large field of view, panoramic and Panomorph imagers are modules of interest in optical design. An important field of view introduces many aberrations in a system. To obtain the desired image quality, aberrations are generally minimized by the optimization of certain optical components, but this practice has its limits. The goal of this project is hence to investigate other techniques that would allow breaking these limits. Three types of techniques are investigated: hardware, software and hybrid.
In the hardware section, the curved sensor and the freeform field lens are analyzed. It is shown that they allow for a best focus effect on the whole image. The curved sensor can also be used to create a monocentric system which simplifies the optical design and gives increased performances compared to the traditional system.
In the software section, the gains obtainable by image processing are highlighted. It is shown that even with the important variation of the PSF across the field of view, deconvolution still increases image quality as a whole. Lateral color correction gives additional improvement of the image. Both methods are sufficiently fast to consider a video application.
The last section addresses wavefront coding. Two methods of optimization are presented: optimization by the MTF and optimization by the variance between object and image. The optimization by the variance requires more computation time but gives better results because it considers the effect of image reconstruction and noise. In this section, simulations are also used to compare the performances and the applicability of two phase mask types. It is shown that the cubic phase mask is more useful to correct defocus and astigmatism while the quartic phase mask is better for coma and Gaussian white noise.
Using the information obtained with the simulations, a prototype based on the IMV1 ImmerVision lens was built. Unfortunately the cubic phase mask manufactured had a surface roughness that was too high and the resulting images are noisy.
VII
Table des matières
Résumé ... III Abstract ... V Table des matières ... VII Table des figures ... IX Introduction ... 1 1. Lentilles grand angle et leur conception ... 5 1.1 Lentille panoramique ... 5 1.2 Système anamorphique ... 9 1.3 Lentille Panomorphe ... 11 2. Techniques matérielles ... 19 2.1 Senseur courbé ... 19 2.1.1 Design monocentrique ... 20 2.1.2 Correction d’optique existante ... 26 2.2 Lentilles de champ de forme libre sur le détecteur ... 31 2.2.1 Correction d’optique existante ... 33 2.2.2 Comparaison entre les verres et le senseur courbé ... 35 3. Techniques logicielles ... 39 3.1 Déconvolution ... 39 3.1.1 Déconvolution de Wiener ... 41 3.1.2 Limites d’applicabilité de la déconvolution ... 42 3.2 Correction software de la couleur ... 43 3.3 Résultats ... 44 3.3.1 Amélioration suggestive de la qualité d’image ... 45 3.3.2 Amélioration de la MTF ... 48 3.3.3 Analyse ... 52 4. Encodage de front d’onde ... 55 4.1 Présentation de la technique ... 55 4.2 Optimisation sur la MTF ... 58 4.3 Optimisation par la variance entre l’objet et l’image ... 60
VIII 4.4 Simulation de correction d’aberrations par l’encodage de front d’onde ... 62 4.4.1 Correction d’aberrations simples ... 67 4.4.2 Correction d’aberrations multiples ... 75 4.4.3 Effet du bruit sur la reconstruction de l’image ... 83 4.5 Prototypes ... 86 4.5.1 Optimisation par la MTF ... 86 4.5.2 Optimisation par la variance ... 93 4.5.3 Fabrication et caractérisation du masque de phase ... 96 4.5.4 Caractérisation du prototype ... 100 Conclusion ... 105 Bibliographie ... 111
IX
Table des figures
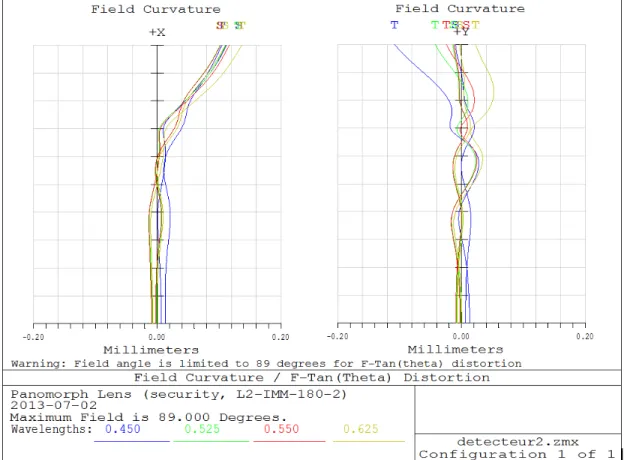
Figure 1 : Exemple de téléphoto inversé : « Edgard Hugues ; usp 3468600; F/2.5 90 DEG wide angle objective », tiré de la référence [3]. Sur cette image, on peut voir : à gauche, le schéma de la lentille, au centre, les graphiques d’interception des rayons en fonction du champ de vue normalisé et, à droite, les graphiques de sphèrochromatisme, de courbure de champ et de distorsion. _________________________ 6 Figure 2 : Exemple de fish‐eye : « Mitsuaki Horimoto; USP 4256373; F/2.8 180 DEG. Fish‐Eye Lens #7 », tiré de la référence [3]. Sur cette image, on peut voir : à gauche, le schéma de la lentille, au centre, les graphiques d’interception des rayons en fonction du champ de vue normalisé et, à droite, les graphiques de sphèrochromatisme, de courbure de champ et de distorsion. _____________________________________ 8 Figure 3 : Comparaison de l’image d’un endoscope de type fish‐eye avec celle d’un endoscope Panomorphe. ______________________________________________________________________________________ 11 Figure 4 : Schéma de la lentille IMV1 ________________________________________________________ 12 Figure 5 : Performances d’une lentille Panomorphe IMV1. De gauche à droite, puis de haut en bas on trouve : les caractéristiques du système, le diagramme des taches (spot diagram), le graphique des éventails de rayons (ray fan plot), les MTF polychromatiques, la courbure de champ et la courbe de distorsion dans l’axe Y (petit axe), et l’erreur RMS du front d’onde en fonction du champ de vue. ___________________________ 13 Figure 6 : Courbure de champ et astigmatisme dans l’axe X et Y de la lentille IMV1 ___________________ 15 Figure 7 : Déplacement du bleu par rapport au vert pour le grand axe (axe X) de la lentille IMV1. Le trait plein représente la courbe théorique pour une lentille Panomorphe très similaire à la lentille IMV1 et les croix représentent les valeurs mesurées. _________________________________________________________ 16 Figure 8 : Performances du design monocentrique. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue. __________________________________________________________________________ 21 Figure 9 : Diagramme des taches du système monocentrique. On remarque l’écrasement de la tache en fonction du champ de vue dû au vignetting dans le système. _____________________________________ 22 Figure 10 : Illumination relative du système monocentrique ______________________________________ 22 Figure 11 : Performances du design à trois lentilles. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue. __________________________________________________________________________ 24 Figure 12 : Diagramme des taches du système à trois lentilles. On remarque que la taille du spot augmente avec le champ de vue. ____________________________________________________________________ 25
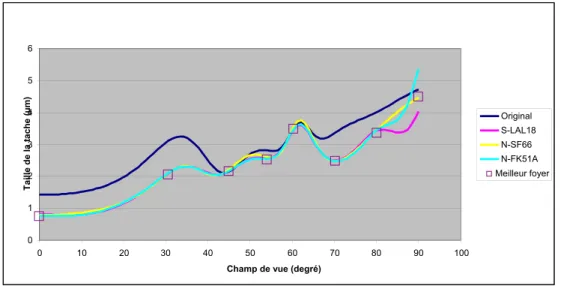
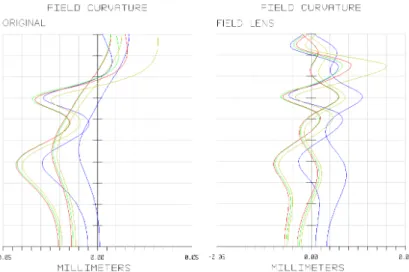
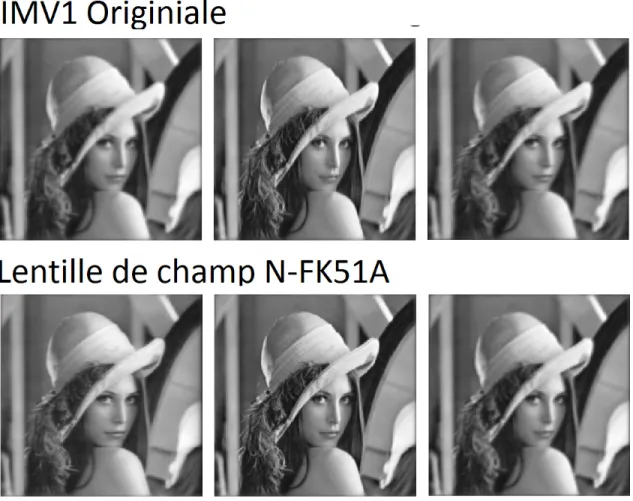
X Figure 13 : Illumination relative du système à trois lentilles ______________________________________ 26 Figure 14 : Aperçu de la surface idéale pour obtenir un effet de meilleur foyer local au plan image de la lentille IMV1. Un seul quadrant est représenté, les autres quadrants peuvent être obtenus par symétrie. La charte de couleur donne l’épaisseur de la surface. Toutes les dimensions sont en millimètres.___________ 28 Figure 15 : Performances de la lentille IMV1 avec un senseur courbé. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue. _________________________________________________________________________ 29 Figure 16 : Courbure de champ sagittale et tangentielle dans les 2 axes pour la lentille Panomorphe avec senseur courbé pour 3 longueurs d’onde de 0° à 90° de champ de vue. _____________________________ 30 Figure 17 : Performances de la lentille IMV1 avec une lentille de champ en N‐FK51A. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue. _____________________________________________________________ 34 Figure 18 : Taille de la tache image en fonction du champ de vue pour différents types de verre sur le grand axe de la lentille IMV1. Les carrés représentent la performance obtenue en appliquant une mise au foyer locale. ________________________________________________________________________________ 35 Figure 19 : Taille de la tache image en fonction du champ de vue pour différents types de verre sur le petit axe de la lentille IMV1. Les carrés représentent la performance obtenue en appliquant une mise au foyer locale. Le calcul pour le verre N‐SF66 montre des instabilités numériques pour des valeurs supérieures à 70°. _____________________________________________________________________________________ 35 Figure 20 : Graphique de la taille du spot pour la lentille Panomorphe originale, avec un senseur courbé et avec la meilleure lentille de champ (verre S‐LAL18). ____________________________________________ 36 Figure 21 : Effet de la correction sur la courbure de champ de la lentille de champ. ___________________ 36 Figure 22 : Simulations d’images pour la lentille IMV1 originale et la lentille modifiée par l’ajout d’une lentille de champ en N‐FK51A. Les simulations d’images pour les autres verres ainsi que pour le détecteur courbé donnent des résultats presque identiques et ne sont donc pas présentés. La taille des pixels est de 1 micron. Les champs de vue sont (0,90) pour les images de gauche, (65,0) pour les images du centre et (80,80) pour les images de droite. _______________________________________________________________________ 37 Figure 23 : Graphique des PSF théoriques polychromatiques pour 3 champs de vue différents pour la lentille Panomorphe IMV1. Le graphique en haut à gauche montre une PSF sur le grand axe, le graphique en haut à droite montre une PSF intermédiaire et le graphique en bas montre la PSF centrale. __________________ 43
XI Figure 24 : Image d’une cible de calibration montrant bien la couleur latérale. La transition gauche se trouve à (0°,40°) de champ de vue et la transition droite à (0°,50°). Aucun traitement n’a été effectué sur cette image. ________________________________________________________________________________ 45 Figure 25 : Image d’une cible de calibration montrant le résultat de la correction de la couleur latérale pour la même cible que la figure 2. La disparition des franges est évidente. ______________________________ 46 Figure 26 : Image d’une cible de calibration montrant le résultat de la déconvolution appliquée après la correction de la couleur latérale pour la même cible que la figure 2. Une amélioration est constatée, mais difficile à percevoir à l’œil. ________________________________________________________________ 46 Figure 27 : Image d’une étagère grillagée montrant le résultat de la déconvolution et de la correction de la couleur latérale pour la même cible que la figure 2. On peut observer une augmentation du contraste pour des fréquences spatiales élevées après la déconvolution. ________________________________________ 47 Figure 28 : Profil de transition et MTF d’une transition centrale (0°,0°). _____________________________ 48 Figure 29 : Profil de transition et MTF d’une transition centrale (0°,0°) corrigée pour la couleur latérale. __ 49 Figure 30 : Profil de transition et MTF d’une transition centrale (0°,0°) corrigée pour la couleur latérale et déconvoluée par la PSF à (0°,60°). __________________________________________________________ 50 Figure 31 : Profil de transition et MTF d’une transition périphérique (0°,‐50°). ________________________ 50 Figure 32 : Profil de transition et MTF d’une transition périphérique (0°,‐50°) corrigée pour la couleur latérale et déconvoluée par la PSF à (0°,60°). ________________________________________________________ 51 Figure 33 : Profil de transition et MTF d’une transition périphérique (0°,‐50°) corrigée pour la couleur latérale et déconvoluée par la PSF à (0°,60°). ________________________________________________________ 52 Figure 34 : Haut : PSF d’un système traditionnel avec une quantité grandissante de défocus. Bas : PSF de système avec un masque de phase cubique présentant le même défocus. ___________________________ 56 Figure 35 : Images naturelles et reconstruites pour une quantité variable de défocus. Les images naturelles ont été générées avec la quantité de défocus indiquée, aucun masque de phase et un rapport signal sur bruit de 34 dB. Pour les images reconstruites, un masque de phase cubique de paramètre α=5.5 a été utilisé. __ 66 Figure 36 : RIQ en fonction du défocus et du paramètre du masque cubique (α). Aucun bruit n’a été ajouté, l’objet utilisé est l’image de Lena (voir figure 37). ______________________________________________ 67 Figure 37 : Objets utilisés : de gauche à droite, on a l’image d’un caméraman, l’image « spokes target » et l’image de Lena. ________________________________________________________________________ 68 Figure 38 : RIQ en fonction du défocus et du paramètre du masque cubique pour différente images. _____ 68
XII Figure 39 : RIQ en fonction de l’aberration et du paramètre du masque cubique (α). Aucun bruit n’a été ajouté, l’objet utilisé est l’image de Lena. ____________________________________________________ 69 Figure 40 : RIQ en fonction de l’angle relatif entre la PSF du masque et l’aberration. La première rangée montre les données pour un paramètre de masque cubique de 5 radiants et une longueur d’onde d’aberration. Dans la deuxième rangée, le paramètre du masque est 15 radiants et l’aberration est de 3 longueurs d’onde. _______________________________________________________________________ 71 Figure 41 : RIQ en fonction du paramètre de masque cubique et de l’aberration pour la coma et l’astigmatisme. Les données présentées sont une moyenne des résultats pour 5 orientations différentes. _ 72 Figure 42 : RIQ en fonction du paramètre de masque cubique et de l’aberration pour la coma et l’astigmatisme. Les données présentées sont la plus petite valeur obtenue en chaque point pour 5 orientations différentes. __________________________________________________________________ 72 Figure 43 : RIQ en fonction du paramètre de masque quartique et de l’aberration pour différentes aberrations. Aucun bruit n’a été ajouté. _____________________________________________________ 73 Figure 44 : RIQ en fonction du paramètre du masque quartique et du défocus. Pour limiter les artefacts, certaines fréquences de l’OTF du filtre ont été augmentées. _____________________________________ 74 Figure 45 : RIQ en fonction du défocus et du paramètre du masque cubique pour des systèmes présentant une quantité croissante d’astigmatisme. Seuls les RIQ supérieurs à 20 sont tracés. ___________________ 77 Figure 46 : RIQ en fonction du défocus et du paramètre du masque quartique pour des systèmes présentant une quantité croissante d’astigmatisme. Seuls les RIQ supérieurs à 20 sont tracés. ___________________ 78 Figure 47 : RIQ en fonction du défocus et du paramètre du masque cubique pour des systèmes présentant une quantité croissante de coma. Seuls les RIQ supérieurs à 20 sont tracés. _________________________ 79 Figure 48 : RIQ en fonction du défocus et du paramètre du masque quartique pour des systèmes présentant une quantité croissante de coma. Seuls les RIQ supérieurs à 20 sont tracés. _________________________ 80 Figure 49 : RIQ en fonction du défocus et du paramètre du masque cubique pour des systèmes présentant une quantité croissante d’aberration sphérique de troisième ordre. Seuls les RIQ supérieurs à 20 sont tracés. _____________________________________________________________________________________ 81 Figure 50 : RIQ en fonction du défocus et du paramètre du masque cubique pour des systèmes présentant une quantité croissante d’aberration sphérique de troisième ordre. Seuls les RIQ supérieurs à 20 sont tracés. _____________________________________________________________________________________ 82 Figure 51 : RIQ en fonction du défocus et du paramètre du masque cubique pour différents niveaux de bruit. _____________________________________________________________________________________ 83 Figure 52 : RIQ en fonction du défocus et du paramètre du masque quartique pour différents niveaux de bruit. Seuls les RIQ supérieurs à 20 sont tracés. _______________________________________________ 84
XIII Figure 53 : RIQ en fonction du défocus et du paramètre du masque cubique pour différents niveaux de bruit. Seuls les RIQ supérieurs à 20 sont tracés. _____________________________________________________ 85 Figure 54 : MTF de la lentille IMV1 avec un masque cubique de 21.92 radiants. ______________________ 87 Figure 55 : MTF de la lentille IMV1 sans masque. ______________________________________________ 87 Figure 56 : MTF de la lentille IMV1 avec un masque cubique de 2.88 radiants. _______________________ 89 Figure 57 : MTF de la lentille IMV1 modifiée par une surface asphérique et un masque cubique de 5.48 radiants. ______________________________________________________________________________ 90 Figure 58 : Graphique des principaux polynômes de Zernike en fonction du champ de vue sur le petit axe (X) de la lentille IMV1 originale. Seuls les polynômes ayant une composante significative sont tracés. _______ 91 Figure 59 : Graphique des principaux polynômes de Zernike en fonction du champ de vue sur le petit axe (X) de la lentille IMV1 avec un masque de phase cubique. Seuls les polynômes ayant une composante significative sont tracés. __________________________________________________________________ 91 Figure 60 : Graphique des principaux polynômes de Zernike en fonction du champ de vue sur le petit axe (X) de la lentille IMV1 modifiée par une surface asphérique et avec un masque de phase cubique. Seuls les polynômes ayant une composante significative sont tracés. ______________________________________ 92 Figure 61 : Graphique de la qualité d’image en fonction du paramètre du masque pour la lentille IMV1 avec un masque cubique. _____________________________________________________________________ 94 Figure 62 : Simulation d’images pour différents prototypes de systèmes encodés et non encodés. Le RIQ pour chaque image est présenté en dessous de celle‐ci, sauf dans le cas de l’image pour le système original qui n’a pas été déconvoluée. La taille des pixels est de 1 micron. Les champs de vue sont (0,90) pour les images de gauche, (65,0) pour les images du centre et (80,80) pour les images de droite. _______________________ 95 Figure 63 : Dessin de la soumission pour le masque de phase cubique en plastique. ___________________ 97 Figure 64 : Mesure de rugosité de surface telle que mesurée par un AFM au centre du masque. _________ 98 Figure 65 : Mesure de rugosité de surface telle que mesurée par un AFM en périphérie du masque. ______ 99 Figure 66 : Mesure du profil du masque tel que mesuré par un profilomètre de type Dektak. La zone d’intérêt se trouve à 9000 micromètres. ____________________________________________________________ 100 Figure 67 : Ajout du masque de phase dans une lentille IMV1. La figure en haut à gauche montre la lentille IMV1 fixée à une caméra. Dans la figure en haut à droite, le barillet a été retiré. En bas à gauche, la lentille est séparée en deux blocs et l’iris variable a été retiré. En bas à droite, on peut voir le masque collé dans l’espace qu’occupait l’iris. ________________________________________________________________ 101
XIV Figure 68 : PSF théorique et expérimentale pour le prototype de la lentille IMV1 avec un masque de phase cubique. La PSF théorique est la PSF à zéro degré calculée par Zemax. La PSF expérimentale est la PSF calculée avec Matlab à partir des images obtenues. ___________________________________________ 102 Figure 69 : Image d’une cible de calibration obtenue par la lentille IMV1 avec le masque de phase cubique de 4.22 radiants (haut) et son image reconstruite (bas). L’image reconstruite ne comporte que le canal du vert. ____________________________________________________________________________________ 103 Figure 70 : Image d’une cible de calibration obtenue par la lentille IMV1. __________________________ 103 Figure 71 : Image de la cible de calibration reconstruite avec un paramètre de bruit du filtre de Wiener plus élevé. ________________________________________________________________________________ 104
XV
1
Introduction
Pour répondre aux besoins de différentes industries, les concepteurs optiques sont constamment appelés à repousser les limites des systèmes optiques. Que ce soit pour les optiques miniatures pour les caméras de cellulaires ou des optiques gigantesques embarquées sur des satellites, de nouvelles techniques sont constamment développées pour améliorer les performances des systèmes d’imagerie. Bien souvent, les techniques développées pour une application particulière pourraient servir à des applications beaucoup plus diverses que ce qui avait été imaginé au départ. C’est dans cette perspective que ce projet de doctorat a été envisagé; le but étant d’adapter des techniques déjà existantes et de les appliquer à des systèmes pour en améliorer les performances.
Le terme performance est, cependant, très large et plusieurs critères doivent être considérés pour évaluer les performances d’un système d’imagerie. La résolution de l’image est, bien sûr, le plus évident, mais, selon les applications, d’autres critères peuvent être tout aussi importants. Le poids ou la taille du système, par exemple, peuvent être critiques pour une application dans un satellite ou pour un cas de miniaturisation. D’autres critères sont aussi possibles, tels que la résistance au changement de température, la tolérance aux défauts de fabrication, la quantité de lumière amassée, etc. De plus, une méthode qui réduit le temps de conception ou le coût d’un système peut indirectement améliorer le système final en permettant d’allouer une plus grande partie des ressources à d’autres aspects du système. Toute technique susceptible d’améliorer un de ces paramètres peut représenter un gain en performance qui pourrait permettre une application supplémentaire pour ces optiques.
Les systèmes étudiés, les optiques Panomorphes, sont des optiques panoramiques possédant un contrôle de la distorsion avec possiblement l’ajout d’une anamorphose. Ces optiques de grand champ de vue permettent d’utiliser judicieusement les pixels d’un senseur pour en maximiser l’efficacité. Les défis de la conception d’optiques aussi complexes sont nombreux, puisque ces systèmes possèdent plusieurs caractéristiques particulières qui complexifient l’exercice. Des méthodes et des approches différentes doivent donc être utilisées, ce qui peut rendre difficile l’application de nouvelles techniques de conception. Néanmoins, plusieurs possibilités pour améliorer les performances de ces systèmes ont été étudiées et comparées.
2
Les techniques étudiées peuvent être classées en trois types : il y a, d’abord, des techniques purement matérielles, comme l’utilisation d’une lentille de forme libre collée sur le détecteur ou d’un senseur courbé. Ensuite, il y a les alternatives logicielles, comme la déconvolution de l’image et la correction numérique de la couleur. Finalement, il y a les techniques hybrides, c’est-à-dire des techniques qui combinent l’optimisation des composantes matérielles avec les outils de traitement numérique. Bien que certaines de ces techniques soient déjà bien développées, elles n’ont jamais été appliquées dans ce contexte. Cette application permettra donc, en plus de fournir de nouveaux outils pour le design de ces systèmes, de raffiner les techniques utilisées et d’étendre le champ des connaissances à leur sujet. Les conclusions que l’on peut tirer de cet exercice dépassent donc le cas restreint des imageurs Panomorphes et s’appliquent non seulement aux systèmes panoramiques standards, mais à tous les systèmes susceptibles d’utiliser ces technologies.
Avant de présenter plus en détails les techniques qui font l’objet de ce travail, il est essentiel de bien comprendre les systèmes qui seront étudiés. Le premier chapitre est donc dédié à une description détaillée de ces systèmes et de systèmes connexes. En premier lieu, les caractéristiques des lentilles panoramiques ainsi que les particularités de leur conception sont présentées. Par la suite, certaines particularités des systèmes anamorphiques sont mises en lumière. Finalement, le concept des systèmes Panomorphes est expliqué et la lentille IMV1 de la compagnie ImmerVision est présentée.
Le deuxième chapitre présente l’étude des techniques matérielles. Dans ce chapitre, il est principalement question de compenser la courbure de champ et l’astigmatisme de lentilles à grand champ de vue par un effet de défocus local. Cet effet est amené par deux techniques : le senseur courbé et la lentille de champ de forme libre collée sur le détecteur. Ces techniques sont alors comparées, à l’aide de simulations, pour montrer l’augmentation de la qualité d’image susceptible d’être produite par ces procédés.
Le troisième chapitre comprend l’analyse de techniques logicielles pour augmenter la qualité de l’image finale. Deux techniques ont été sélectionnées dans cette section : la déconvolution par un filtre de Wiener et la correction de la couleur latérale. Ces deux techniques complémentaires sont analysées et leurs performances sont illustrées par la correction d’images réelles captées par la lentille IMV1.
3
Le quatrième chapitre présente une technique dite hybride, c’est-à-dire une technique qui combine l’optimisation de composantes matérielles et le traitement logiciel. Cette technique est l’encodage de front d’onde. Dans ce chapitre, deux méthodes pour optimiser des systèmes optiques avec de l’encodage de front d’onde sont présentées. La première, l’optimisation par l’analyse de la fonction de transfert de modulation (MTF pour Modulation Transfer Function, en anglais), ressemble à une technique d’optimisation de système conventionnel, alors que l’autre, l’optimisation par la variance entre l’objet et l’image, est plus particulière. Chaque méthode fait l’objet d’une section de chapitre.
Par la suite, dans la troisième section, des simulations de corrections d’aberrations par l’encodage de front d’onde sont présentées. Les simulations ne se limitent pas aux systèmes Panomorphes et elles sont plutôt orientées pour pouvoir être utilisables pour n’importe quel système. Pour davantage de généralité, plusieurs types de simulations ont été effectués : les simulations d’aberrations simples, les combinaisons d’aberrations et les simulations comportant du bruit.
Finalement la dernière section du quatrième chapitre présente les prototypes conçus par la modification de la lentille IMV1 pour de l’encodage de front d’onde. Des prototypes virtuels ont été conçus avec les deux méthodes d’optimisation et un prototype physique a été conçu par la méthode d’optimisation par la variance. Une analyse des performances des prototypes est ensuite présentée.
5
1. Lentilles grand angle et leur conception
Pour mieux comprendre l’intérêt des techniques étudiées, il est essentiel de bien comprendre les limites des systèmes où elles seront appliquées en plus du contexte de leur émergence. Cette section présente donc les caractéristiques des systèmes Panomorphes, en plus des caractéristiques des systèmes précurseurs.
1.1 Lentille panoramique
Les systèmes panoramiques sont un domaine important du développement des systèmes optiques. La possibilité d’imager instantanément un très grand champ de vue amène un avantage dans plusieurs applications : vidéosurveillance, robotique, vision assistée, webcam, endoscopie, etc. [1]. Pour répondre aux besoins de ces secteurs, plusieurs types de systèmes ont été développés. Les systèmes de type fish-eye en sont un exemple. Ces systèmes utilisent une série d’éléments réfractifs pour faire une image sur un champ de vue de 180° ou plus. Les premiers prototypes de fish-eye ont d’abord été développés pour photographier le ciel d’un horizon à l’autre pour des applications en météorologie dans les
années 1920 [2]. Le concept de la lentille est similaire à un téléphoto inversé, mais avec un
champ de vue encore plus important. Les deux systèmes possèdent donc des caractéristiques très similaires. Pour cette raison, il est pertinent d’analyser le téléphoto pour mieux comprendre le fish-eye.
Un téléphoto inversé est un système à grand champ de vue qui comporte un groupe de lentilles de puissance négative (divergeant) à l’avant et un groupe positif (convergeant) à l’arrière. Ceci permet d’avoir une longueur focale arrière plus grande que la longueur focale effective. Le champ de vue total d’un téléphoto inversé peut aller jusqu’à 90°, comme c’est le cas du design présenté à la figure 1 tiré de la référence [3].
6
Figure 1 : Exemple de téléphoto inversé : « Edgard Hugues ; usp 3468600; F/2.5 90 DEG wide angle objective », tiré de la référence [3]. Sur cette image, on peut voir : à gauche, le schéma de la lentille, au centre, les graphiques d’interception des rayons en fonction du champ de vue normalisé et, à droite, les graphiques de sphèrochromatisme, de courbure de champ et de distorsion.
Comme on peut le voir, la distorsion et la courbure de champ sont des aberrations importantes de ce type de design. On remarque, de plus, que l’illumination diminue en fonction du champ de vue. Cette caractéristique, appelée vignetting, s’observe par le rétrécissement de la courbe sur les graphiques d’interception des rayons à mesure que le champ de vue augmente. Par ailleurs, étant donné le manque de symétrie avant- arrière du système, la couleur latérale et la coma sont difficiles à contrôler.
Pour passer de ce design à un fish-eye, on doit augmenter la courbure de la lentille frontale. Ceci dévie les rayons chefs d’angles élevés vers le stop, ce qui permet de collecter la lumière provenant de toute une demi-sphère. En plus des aberrations ajoutées par ce procédé, plusieurs problèmes surviennent. Tout d’abord, comme on tente d’imager toute une demi-sphère sur un plan fini, l’image obtenue sera fortement distordue. Dans ce cas, la distorsion n’est plus une aberration à éliminer, mais un outil nécessaire. Une grande quantité de distorsion barillet doit être introduite pour permettre la formation d’une image sur un détecteur de taille finie. Dans ce contexte, la longueur focale ne peut plus être exprimée comme selon sa définition usuelle (voir éqn. (1.1))[3]. Le nouveau profil de distorsion peut avoir plusieurs formes, mais la forme la plus fréquente est présentée à l’équation (1.2).
7
H’ f tan (1.1)
H’ f (1.2)
Dans ces équations, H’ représente la hauteur de l’image, f , la longueur focale et ,
l’angle du champ de vue.
Un autre problème survient alors que l’on tente de définir la pupille d’entrée du système. Dans les systèmes à petit champ de vue, la pupille se forme sur l’axe optique et on peut considérer qu’elle est la même pour tous les champs de vue. Cependant, il est bien évident que si des rayons arrivant à 90° par rapport à l’axe optique entrent dans le système, la pupille doit absolument tourner pour accommoder ces rayons. La pupille variera donc en fonction du champ de vue et ne se trouvera pas nécessairement sur l’axe [4]. Ceci peut être un problème pour un logiciel de conception optique qui aura du mal à diriger les rayons au bon endroit en présence d’un déplacement important de la pupille [3].
Ce problème peut en général être corrigé manuellement, mais dans certains cas, en particulier lors de l’optimisation, il est possible que le logiciel soit incapable de calculer la position réelle des rayons. De plus, le champ de vue instantané de l’image sera nécessairement plus faible étant donné le grand contenu angulaire du système. Malgré toutes ces limitations, le fish-eye reste un type de lentilles couramment utilisé. La figure suivante présente un exemple d’une de ces lentilles.
8
Figure 2 : Exemple de fish-eye : « Mitsuaki Horimoto; USP 4256373; F/2.8 180 DEG. Fish-Eye Lens #7 », tiré de la référence [3]. Sur cette image, on peut voir : à gauche, le schéma de la lentille, au centre, les graphiques d’interception des rayons en fonction du champ de vue normalisé et, à droite, les graphiques de sphèrochromatisme, de courbure de champ et de distorsion.
On remarque que par rapport au téléphoto, la courbure de la lentille frontale est plus importante, que la distorsion a considérablement augmenté et que la courbure de champ prend une forme particulière. La forme de la courbure de champ est le résultat des corrections multiples qui y sont appliquées. Ces corrections sont efficaces pour des ordres faibles, mais laissent des aberrations résiduelles d’ordre élevé. Ceci montre bien une des particularités des systèmes panoramiques, soit qu’ils présentent des aberrations qui varient beaucoup en fonction du champ de vue.
On remarque aussi que le vignetting sur le plan méridional a été réduit. Les pupilles d’entrée pour les grands champs de vue ont donc été augmentées. Une autre caractéristique importante de ces systèmes est leur courte longueur focale, qui est souvent inférieure à 10 mm. En effet, comme dans le cas du téléphoto inversé, la longueur focale effective est plus petite que la longueur focale arrière. Il en résulte donc que dans la majorité des applications, les lentilles de type fish-eye ne souffrent pas de défocus dû à l’objet, la distance objet pouvant être approximée comme infinie. Certaines exceptions existent
9
néanmoins. Par exemple, les endoscopes font l’image d’objets à une distance non-négligeable par rapport à la longueur focale.
Les systèmes fish-eye ne sont pas les seuls systèmes à pouvoir imager sur un champ de vue de 180° ou plus. Certains systèmes, dit catadioptriques, utilisent des éléments réflectifs et réfractifs pour effectuer la même fonction. La plupart de ces systèmes utilisent une optique et une caméra standard pointées sur un miroir courbé asphérique. L’utilisation d’un miroir permet de limiter l’aberration chromatique tout en générant une distorsion suffisamment élevée pour obtenir le champ de vue désiré. Ces systèmes ont, par contre, généralement le désavantage d’avoir une zone aveugle au centre [5].
Finalement, il est aussi possible d’utiliser plusieurs caméras simultanément et de faire de l’assemblage d’images pour obtenir un champ de vue efficace de 180° [6]. Ces systèmes offrent, pour leur part, l’avantage de pouvoir contrôler la distorsion au niveau de l’optique. En effet, le petit champ de vue individuel de chaque caméra permet d’éliminer la distorsion en plus de faciliter le contrôle des aberrations dépendantes du champ de vue. Par contre, ce procédé nécessite près d’une dizaine de caméras et de systèmes optiques indépendants.
1.2 Système anamorphique
Les systèmes anamorphiques sont, par définition, des systèmes avec un grandissement différent selon deux axes. Ces systèmes ont donc deux axes de symétrie dont l’intersection définit l’axe optique [7]. Leurs propriétés leur permettent de changer les proportions d’une image de manière à ce que, par exemple, une ellipse soit imagée comme un cercle (et vice versa). Les systèmes anamorphiques les plus simples sont composés de lentilles cylindriques couplées avec des lentilles ordinaires, mais il est aussi possible d’ajouter des lentilles toroïdales ou des lentilles de forme libre ayant des paramètres de courbure différents dans les deux axes. Étant donné leur symétrie particulière, les aberrations pouvant être créées ne sont pas conventionnelles. Les premiers travaux sur ces systèmes débutent au début du XXe siècle [8,9], mais ce n’est que récemment que l’intérêt porté à ces systèmes nécessite une dérivation formelle des coefficients d’aberrations [10]. Au premier ordre, un système anamorphique peut être considéré comme deux systèmes conventionnels indépendants dans deux axes différents. Deux plans images seront donc
10
créés et, si on désire former une image nette, ces plans devront être confondus. Pour les ordres plus élevés, les coefficients des aberrations ont été développés [11,12] et peuvent être exprimés comme une somme, de manière similaire aux coefficients de Seidel. Néanmoins, certains concepts, comme celui des pupilles d’entrée et de sortie, ne sont pas aussi clairement définis que dans le cas des systèmes standard à symétrie de rotation [10].
De plus, le concept de champ de vue tel que défini dans le cas d’optiques conventionnelles symétriques ne décrira pas adéquatement le comportement d’un système anamorphique. En effet si, par exemple, on tente de décrire les aberrations présentes sur une zone de l’image, il ne sera plus suffisant de donner le champ de vue imagé sur cette zone, puisque les aberrations dépendront de l’orientation dans le plan image. Le concept de champ de vue devra donc être étendu pour tenir compte du manque de symétrie circulaire du système. Plusieurs définitions pour le champ de vue sont alors possibles, par exemple, l’ajout d’un angle donnant l’orientation dans le plan image. Pour une correspondance plus facile avec les analyses, c’est cependant la convention utilisée par le logiciel Zemax qui sera utilisée. Dans ce cas, le champ de vue est défini par un angle x : αx, et un angle y : αy,
disposés de cette manière : (αx, αy) .Ces angles définissent un vecteur unitaire , ,
selon les équations suivantes (voir « Zemax user guide », page 55 [13]) :
tan x l n (1.3) tan y m n (1.4) 2 2 2 1 l n m (1.5)
Ce système peut donc faire référence à n’importe quel point dans l’espace image.
Les applications des systèmes anamorphiques sont variées. Grâce à ces systèmes, il est par exemple possible d’enregistrer une vidéo en format widescreen sur un film ou un détecteur de taille standard [14]. Ils sont aussi utilisés pour contrôler le profil d’un faisceau laser [15] ou pour inspecter des chips semi-conducteurs [16]. Récemment, les composantes anamorphiques ont aussi fait leur apparition dans les systèmes panoramiques, ce qui permet
11
d’utiliser plus efficacement les pixels des CCD. C’est une des possibilités qu’offrent certaines lentilles Panomorphes qui sont présentées à la section suivante.
1.3 Lentille Panomorphe
Les lentilles Panomorphes sont une technologie développée et brevetée par la compagnie ImmerVision [17]. Ce sont des lentilles panoramiques dont le profil de distorsion est contrôlé pour augmenter le champ de vue dans une zone d’intérêt. De plus, des composantes anamorphiques peuvent être introduites pour donner à la tache image une forme elliptique, plutôt que circulaire (comme dans le cas d’un fish-eye), ce qui augmente l’utilisation des pixels sur les senseurs rectangulaires. Cette technologie peut représenter un avantage par rapport aux systèmes panoramiques dans plusieurs secteurs, tels que la surveillance vidéo [18], l’endoscopie [19], la vision assistée [20], etc. Il est même possible de l’utiliser pour des systèmes infrarouges [21]. La figure suivante, tirée de la référence [22], démontre bien les avantages de cette technologie.
Figure 3 : Comparaison de l’image d’un endoscope de type fish-eye (gauche) avec celle d’un endoscope Panomorphe (droit).
Cette figure montre, à gauche, une image qui pourrait être formée par une lentille de type fish-eye. On remarque une grande quantité de noir dans l’image, ce qui représente des pixels non utilisés. Sur l’image Panomorphe, à droite, on voit que l’utilisation des pixels est optimisée. De plus, on remarque que le centre de l’image, qui représente ici la zone d’intérêt, prend beaucoup plus de place sur le senseur, ce qui permet un champ de vue instantané augmenté dans cette zone.
12
Dans le cas où des systèmes Panomorphes combinent le panoramique avec l’anamorphique, les particularités reliées à ces deux types d’imageur se combinent elles aussi. On peut voir cet effet sur les figures suivantes, qui donnent un aperçu d’une lentille Panomorphe.
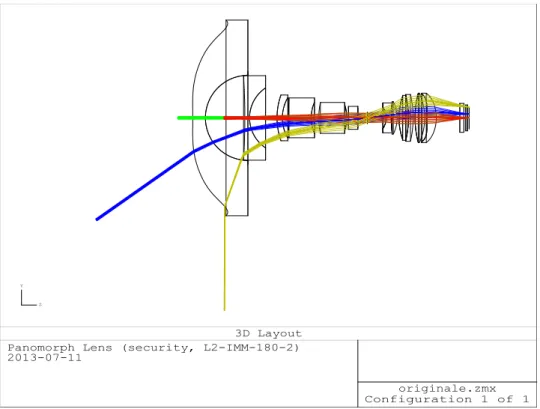
Figure 4 : Schéma de la lentille IMV1
originale.zmx Configuration 1 of 1 3D Layout
Panomorph Lens (security, L2-IMM-180-2) 2013-07-11
X
Y Z
13
Figure 5 : Performances d’une lentille Panomorphe IMV1. De gauche à droite, puis de haut en bas on trouve : les caractéristiques du système, le diagramme des taches (spot diagram), le graphique des éventails de rayons (ray fan plot), les MTF polychromatiques, la courbure de champ et la courbe de distorsion dans l’axe Y (petit axe), et l’erreur RMS du front d’onde en fonction du champ de vue.
La figure 5 est un ensemble de graphiques générés automatiquement dans le logiciel Zemax qui donnent un aperçu des performances d’un système optique. Le premier bloc, en
Date : 2013-07-11 File Name : originale.zmx
Title : Panomorph Lens (security, L2-IMM-180-2) Units : Millimeters
EFL : 1.10752 BFL : 0.31183
Total Track : 85.1343 Element Count: 14 Working F/# : 2.84942
Image Height : 214.513 Magnification: 0
Entr Pup Dia : 0.34
Entr Pup Pos : 36.1288 Exit Pup Dia : 3.34544Exit Pup Pos : 10.8846
Field Type : Angle in degrees
# X-Value Y-Value Weight 1 0.000000 35.000000 1.000000 2 70.000000 0.000000 1.000000 3 90.000000 0.000000 1.000000 4 0.000000 90.000000 1.000000 Wavelengths in µm: # Value Weight 1 0.450000 0.300000 2 0.525000 1.000000 3 0.550000 1.000000 4 0.625000 0.300000 Comments: Notes... Surface: IMA 100 .0 0 OBJ: 0.00, 35.00 (deg) IMA: 0.000, 0.788 mm OBJ: 70.00, 0.00 (deg) IMA: 1.476, 0.000 mm OBJ: 90.00, 0.00 (deg) IMA: 1.718, 0.000 mm OBJ: 0.00, 90.00 (deg) IMA: 0.000, 2.299 mm 0.4500 0.5250 0.5500 0.6250 originale.zmx Configuration 1 of 1 Spot Diagram
Panomorph Lens (security, L2-IMM-180-2) 2013-07-11 Units are µm.
Field : 1 2 3 4
RMS radius : 3.648 3.645 2.741 5.392
GEO radius : 10.041 8.761 7.334 23.539
Scale bar : 100 Reference : Chief Ray
Py Px ex ey OBJ: 0.00, 35.00 (deg) Py Px ex ey OBJ: 70.00, 0.00 (deg) Py Px ex ey OBJ: 90.00, 0.00 (deg) Py Px ex ey OBJ: 0.00, 90.00 (deg) originale.zmx Configuration 1 of 1 Transverse Ray Fan Plot
Panomorph Lens (security, L2-IMM-180-2) 2013-07-11 Maximum Scale: ± 50.000 µm. 0.450 0.525 0.550 0.625 Surface: Image 0 11.4 22.8 34.2 45.6 57 68.4 79.8 91.2 102.6 114 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Spatial Frequency in cycles per mm TS 0.00, 35.00 (deg) TS 70.00, 0.00 (deg) TS 90.00, 0.00 (deg) TS 0.00, 90.00 (deg) originale.zmx Configuration 1 of 1 M odu lu s of th e OT F Polychromatic Diffraction MTF Panomorph Lens (security, L2-IMM-180-2)
2013-07-11 Data for 0.4500 to 0.6250 µm. Surface: Image -100 -0.10 0.00 0.10 0 100 Millimeters Percent +Y +Y
Field Curvature Distortion
T T T SSSS T
originale.zmx Configuration 1 of 1 Field Curvature / F-Tan(Theta) Distortion
Panomorph Lens (security, L2-IMM-180-2)
Warning: Field angle is limited to 89 degrees for F-Tan(theta) distortion
2013-07-11
Maximum Field is 89.000 Degrees.
Wavelengths: 0.450 0.525 0.550 0.625 0 9 18 27 36 45 54 63 72 81 90 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 +Y Field in Degrees originale.zmx Configuration 1 of 1 RMS W a v e f ron t Er ro r i n Wa ve s
RMS Wavefront Error vs Field Panomorph Lens (security, L2-IMM-180-2)
2013-07-11
Poly 0.45 0.525 0.55 0.625
14
haut à gauche, donne les informations générales du système en plus d’indiquer avec quels paramètres les autres graphiques ont été générés. Le bloc en haut à droite présente le diagramme des taches optiques qui donne un aperçu de la taille et de la forme de la PSF (Point Spread Function ou fonction de l’étalement du point) géométrique.
Au milieu à gauche, on a les graphiques des éventails de rayons (ray fan plot). Ces graphiques montrent la différence de parcours optique (OPD) des rayons dans les deux axes (X et Y) de la pupille et donnent une indication sur le type d’aberrations présentes dans le système.
Au milieu à droite, on présente les graphiques des MTF sagittales et tangentielles pour plusieurs champs de vue. En bas à gauche, ce sont les graphiques de la distorsion (droite) et de la courbure de champ (gauche) en fonction du champ de vue dans les plans sagittal et tangentiel. La couleur des lignes indique une longueur d’onde particulière (apparaissant sur la légende). Plus les lignes s’éloignent de l’axe central, plus l’aberration en question est importante.
Finalement, en bas à droite, le graphique de l’erreur RMS du front d’onde en fonction du champ de vue est présenté. Comme la lentille IMV1 n’a pas de symétrie de rotation, les performances sont différentes en fonction de l’orientation selon laquelle on analyse la lentille. On peut observer cet effet sur les courbes de distorsion présentées à la figure 6.
15
Figure 6 : Courbure de champ et astigmatisme dans l’axe X et Y de la lentille IMV1
On remarque, sur la figure 6, que la courbure de champ et l’astigmatisme ont une forme particulière qui change selon l’axe. Il ne s’agit pas simplement d’un étirement dans un axe puisque, si c’était le cas, les deux courbes auraient le même profil. Il n’est donc pas a priori possible de traiter le système comme un système circulaire étiré dans un axe pour simplifier les choses.
De plus, on peut voir la variation importante de l’erreur du front d’onde en fonction du champ de vue. Ceci est dû à plusieurs facteurs; le premier facteur est le contrôle de la distorsion implémenté dans la lentille. Pour obtenir une zone d’intérêt dont le champ de vue est augmenté, on génère un profil de distorsion particulier qui fait en sorte que cette zone aura un facteur de grandissement différent des autres parties de l’image. Ce grandissement peut influencer certaines aberrations, comme l’astigmatisme et la courbure de champ, et on remarque une similarité entre la courbe de grandissement local et la courbe d’erreur du front d’onde. Le deuxième facteur est que les aberrations varient davantage en fonction du
16
champ de vue que pour un imageur de type fish-eye. Cette variation du front d’onde peut amener des problèmes pour le traitement numérique de l’image.
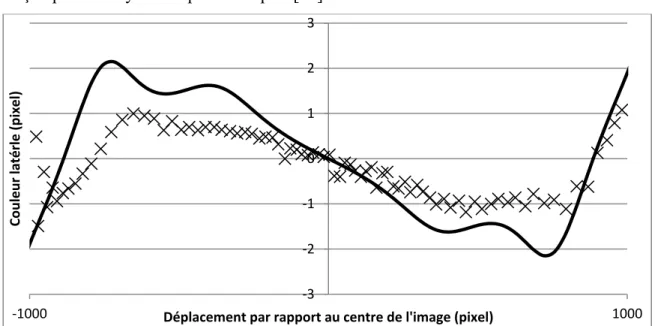
Une autre particularité des systèmes Panomorphes qui n’est pas démontrée dans ces images est la variation de la pupille d’entrée. Bien que les systèmes panoramiques en général souffrent du problème de déformation de la pupille d’entrée [23], les systèmes Panomorphes en particulier ont des variations plus importantes [4]. De plus, en raison du grandissement local introduit, le tolérancement de cette optique doit bénéficier d’une approche non-conventionnelle de tolérancement par zone sur la lentille [24]. Les erreurs de fabrication de ces lentilles peuvent, comme dans tous les systèmes optiques, créer des variations importantes de leurs caractéristiques. La figure suivante montre l’exemple de la couleur latérale que j’ai mesurée sur une photo d’une cible de calibration spécialement conçue pour des systèmes panoramiques [25].
Figure 7 : Déplacement du bleu par rapport au vert pour le grand axe (axe X) de la lentille IMV1. Le trait plein représente la courbe théorique pour une lentille Panomorphe très similaire à la lentille IMV1 et les croix représentent les valeurs mesurées.
Comme on peut le voir, des variations non-symétriques apparaissent pour la couleur latérale. On remarque aussi que la forme de la courbe de la couleur latérale est, comme celle de la courbure de champ, d’ordre élevé. Ceci peut s’expliquer par le fait que, puisque la couleur latérale absolue augmente avec la longueur focale et avec le champ de vue, la courbe observée est donc une combinaison de la courbe de longueur focale instantanée de la lentille et d’une différence de grandissement entre les deux couleurs.
‐3 ‐2 ‐1 0 1 2 3 ‐1000 1000 Couleur latérle (pixel) Déplacement par rapport au centre de l'image (pixel)
17
Toutes ces particularités rendent les systèmes anamorphiques, panoramiques et Panomorphes très intéressants du point de vue du design optique. Les aberrations non conventionnelles de ces systèmes mettent à l’épreuve les techniques conventionnelles de design et amènent à en développer de nouvelles. Certaines techniques n’ayant jamais été appliquées à ces systèmes ont donc été envisagées pour en améliorer les performances.
19
2. Techniques matérielles
Les lentilles Panomorphes sont généralement composées de lentilles standard, asphériques, anamorphiques et toroïdales et d’un détecteur plat. Les techniques matérielles présentées dans ce chapitre consistent donc à introduire d’autres types de composantes dans le système et à les optimiser pour en améliorer les performances. Deux types de composantes ont été retenus : le senseur courbé et la lentille de forme libre collée sur le détecteur. Elles ont toutes les deux la même fonction, c'est-à-dire corriger la courbure de champ.
2.1 Senseur courbé
La courbure de champ est une aberration qui fait en sorte que le plan focal d’une lentille varie en fonction du champ de vue. Ce problème vient du fait que l’on tente de faire une image sur une surface plane alors que les lentilles ont une tendance naturelle à créer une image courbée. Plus le champ de vue est important, plus ce problème le devient aussi. De plus, pour des systèmes panoramiques, plusieurs lentilles sont nécessaires pour contrôler cette courbure de champ importante. Ce problème peut néanmoins être évité si on peut contrôler la forme que prend la surface image.
Cette possibilité a été exploitée longtemps avant l’apparition des CCD en utilisant les propriétés des films photographiques qui sont facilement déformables. Ils ont, par exemple, été utilisés pour compenser la courbure de champ d’un télescope [26]. Ce n’est que récemment que des techniques pour manufacturer des CCD courbés ont été développées [27]. Ces senseurs, en épousant la forme de la courbure de champ, permettent de fabriquer des caméras compactes qui possèdent un grand champ de vue [28]. La possibilité de contrôler la forme du plan focal donne donc un degré de liberté supplémentaire lors du design sans avoir à ajouter de lentille dans le système. Cette possibilité permet plusieurs approches pour améliorer les systèmes panoramiques. Par exemple, un système déjà conçu mais ayant une courbure de champ importante peut aussi être corrigé avec l’ajout d’un senseur courbé épousant la courbure de champ.
20
2.1.1 Design monocentrique
Lors du design d’un système optique, la courbure du détecteur peut être mise comme variable. En effet, il est possible, dans certains logiciels de conception optique, de donner au détecteur une forme sphérique, asphérique ou même une forme libre. Un détecteur sphérique concave dont le rayon est variable peut compenser parfaitement la courbure de champ créée par un design monocentrique. Un design monocentrique est un design où tous les éléments ont le même centre de courbure. Un exemple d’un pareil design est présenté dans [26]. Cependant, dans cet exemple, le design possède un petit champ de vue en comparaison d’un système panoramique. Dans le but de vérifier si le concept fonctionne pour des grands champs de vue, un système a été optimisé suivant ce concept, mais avec un champ de vue de 70°. Si on optimise un système à 2 lentilles dont le stop se trouve entre les deux lentilles et dont le rayon de courbure du détecteur est variable, on retrouve naturellement un design monocentrique. Ce design est facile à obtenir même sans l’utilisation d’un logiciel de conception optique. Les figures suivantes présentent les caractéristiques du design obtenu.
21
Figure 8 : Performances du design monocentrique. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue.
Date : 2013-07-02 File Name : curved sensor.zmx Title : Units : Millimeters EFL : 100.595 BFL : 34.612 Total Track : 218.989 Element Count: 2 Working F/# : 5.00005
Image Height : 276.383 Magnification: 0 Entr Pup Dia : 20
Entr Pup Pos : 115.983 Exit Pup Dia : 20Exit Pup Pos : -100.3 Field Type : Angle in degrees
# X-Value Y-Value Weight 1 0.000000 0.000000 1.000000 2 0.000000 30.000000 1.000000 3 0.000000 70.000000 1.000000 Wavelengths in µm: # Value Weight 1 0.550000 1.000000 curved sensor.zmx Configuration 1 of 1 Layout 2013-07-02
Total Axial Length: 218.98913 mm
Py Px ex ey OBJ: 0.00 (deg) Py Px ex ey OBJ: 30.00 (deg) Py Px ex ey OBJ: 70.00 (deg) curved sensor.zmx Configuration 1 of 1 Transverse Ray Fan Plot
2013-07-02 Maximum Scale: ± 50.000 µm. 0.550 Surface: Image 0 11.4 22.8 34.2 45.6 57 68.4 79.8 91.2 102.6 114 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Spatial Frequency in cycles per mm TS 0.00 (deg) TS 30.00 (deg) TS 70.00 (deg) curved sensor.zmx Configuration 1 of 1 Mod ulu s o f t he O T F Polychromatic Diffraction MTF 2013-07-02 Data for 0.5500 to 0.5500 µm. Surface: Image -100 -0.50 0.00 0.50 0 100 Millimeters Percent +Y +Y
Field Curvature Distortion T S
curved sensor.zmx Configuration 1 of 1 Field Curvature / F-Tan(Theta) Distortion
2013-07-02
Maximum Field is 70.000 Degrees. Wavelengths: 0.550 0 7 14 21 28 35 42 49 56 63 70 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 +Y Field in Degrees curved sensor.zmx Configuration 1 of 1 RM S Wa vef ron t E rro r i n Wa ves
RMS Wavefront Error vs Field 2013-07-02
Poly 0.55 Reference: Centroid
22
Figure 9 : Diagramme des taches du système monocentrique. On remarque l’écrasement de la tache en fonction du champ de vue dû au vignetting dans le système.
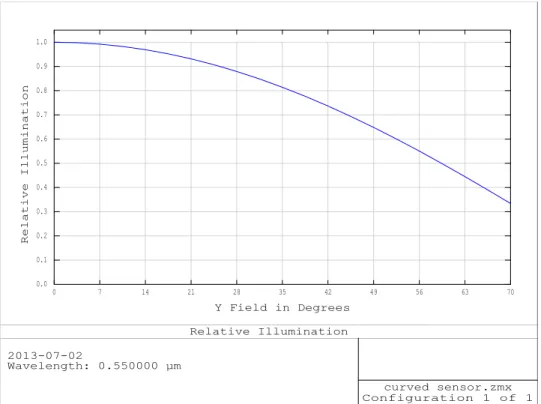
Figure 10 : Illumination relative du système monocentrique
Dans ce design, on remarque tout d’abord que, bien que le concept général soit respecté, le design n’est pas parfaitement monocentrique. Ceci s’explique par le fait que
Surface: IMA 100 .00 OBJ: 0.00 (deg) IMA: 0.000 mm OBJ: 15.00 (deg) IMA: 25.976 mm OBJ: 30.00 (deg) IMA: 50.276 mm OBJ: 50.00 (deg) IMA: 77.356 mm OBJ: 70.00 (deg) IMA: 95.447 mm 0.5500 curved sensor.zmx Configuration 1 of 1 Spot Diagram 2013-07-02 Units are µm. Field : 1 2 3 4 5 RMS radius : 16.958 15.924 13.589 10.963 9.963 GEO radius : 29.744 30.397 31.148 32.276 32.846 Scale bar : 100 Reference : Chief Ray
0 7 14 21 28 35 42 49 56 63 70 Y Field in Degrees 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 curved sensor.zmx Configuration 1 of 1 Relativ e Illuminatio n Relative Illumination 2013-07-02 Wavelength: 0.550000 µm
23
l’optimisation a été faite en minimisant la taille du spot sur un petit nombre de champs de vue. Il est donc normal que le minimum de la fonction de mérite ne soit pas parfaitement le résultat attendu.
Une deuxième observation que l’on peut faire est que les performances sont très similaires d’un champ de vue à l’autre, allant même en augmentant vers les champs de vue élevés. Ceci est très rare pour une lentille ayant un champ de vue aussi élevé, mais cela s’explique facilement. En effet, si on fait abstraction du stop, chaque champ de vue pourrait être considéré comme étant sur l’axe optique avec son rayon chef qui voyage en ligne droite. Cependant, comme le stop effectif rétrécit à mesure que l’on augmente le champ de vue, un important vignetting apparait. Ce vignetting augmente les performances, mais diminue l’illumination relative pour des champs de vue élevés. Si on regarde le design, il est facile de voir qu’un champ de vue de 90° n’aurait aucune énergie. L’illumination relative est donc la plus grande limite de ce système.
À des fins de comparaison, un autre système ayant des caractéristiques similaires a été optimisé, mais sans senseur courbé. Ce système se compose de 3 lentilles et, donc, de 6 surfaces actives; c’est 2 fois plus que les 3 surfaces actives du design monocentrique. En considérant les épaisseurs d’air et de verre, le nombre de variables lors de l’optimisation monte à 13, alors que le design précédent n’en avait que 3. Ceci complique significativement le processus. Si les variables ne sont pas correctement contrôlées, l’optimisation donnera presque assurément des solutions non physiques (par exemple, deux lentilles superposées). De plus, le grand nombre de variables augmente les chances d’obtenir un minimum local qui est très loin du minimum absolu de la fonction de mérite.
Comme c’est généralement le cas en conception optique, la qualité du design obtenu dépendra donc fortement du temps consacré à la conception et de l’expérience du concepteur optique. Le système suivant n’est donc pas le meilleur système qui peut être obtenu. Il s’agit plutôt d’un exemple d’un système qui peut être obtenu en un temps raisonnable (quelques heures, comparativement à quelques minutes pour le design monocentrique).
24
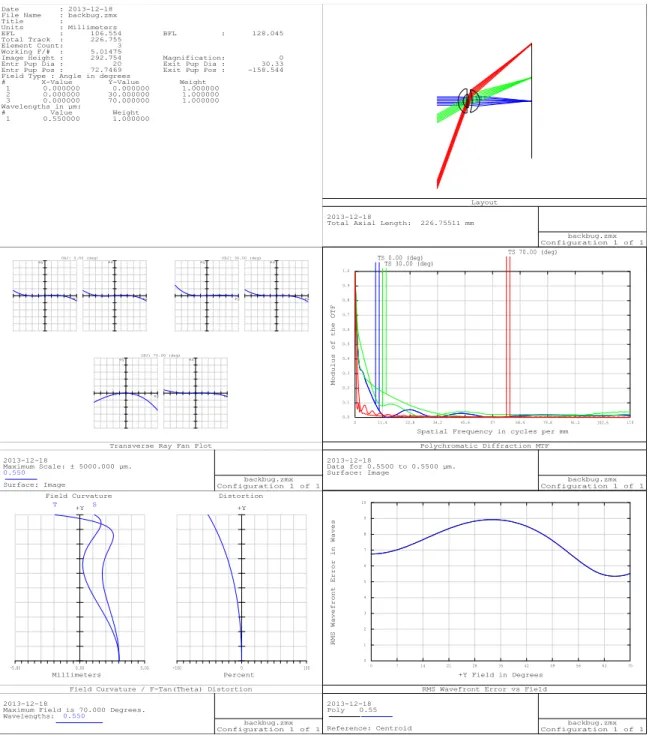
Figure 11 : Performances du design à trois lentilles. De gauche à droite, puis de haut en bas, on a : les caractéristiques du système, le schéma du système, le graphique des éventails de rayons, les MTF du système, la courbure de champ et la courbe de distorsion et l’erreur RMS du front d’onde en fonction du champ de vue.
Date : 2013-12-18 File Name : backbug.zmx Title : Units : Millimeters EFL : 106.554 BFL : 128.045 Total Track : 226.755 Element Count: 3 Working F/# : 5.01475
Image Height : 292.754 Magnification: 0 Entr Pup Dia : 20
Entr Pup Pos : 72.7469 Exit Pup Dia : 30.33Exit Pup Pos : -158.544 Field Type : Angle in degrees
# X-Value Y-Value Weight 1 0.000000 0.000000 1.000000 2 0.000000 30.000000 1.000000 3 0.000000 70.000000 1.000000 Wavelengths in µm: # Value Weight 1 0.550000 1.000000 backbug.zmx Configuration 1 of 1 Layout 2013-12-18
Total Axial Length: 226.75511 mm
Py Px ex ey OBJ: 0.00 (deg) Py Px ex ey OBJ: 30.00 (deg) Py Px ex ey OBJ: 70.00 (deg) backbug.zmx Configuration 1 of 1 Transverse Ray Fan Plot
2013-12-18 Maximum Scale: ± 5000.000 µm. 0.550 Surface: Image 0 11.4 22.8 34.2 45.6 57 68.4 79.8 91.2 102.6 114 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Spatial Frequency in cycles per mm TS 0.00 (deg) TS 30.00 (deg) TS 70.00 (deg) backbug.zmx Configuration 1 of 1 M odu lus of the OT F Polychromatic Diffraction MTF 2013-12-18 Data for 0.5500 to 0.5500 µm. Surface: Image -100 -5.00 0.00 5.00 0 100 Millimeters Percent +Y +Y
Field Curvature Distortion
T S
backbug.zmx Configuration 1 of 1 Field Curvature / F-Tan(Theta) Distortion
2013-12-18
Maximum Field is 70.000 Degrees. Wavelengths: 0.550 0 7 14 21 28 35 42 49 56 63 70 0 1 2 3 4 5 6 7 8 9 10 +Y Field in Degrees backbug.zmx Configuration 1 of 1 RMS Wa vef ron t Er ror in Wa ves
RMS Wavefront Error vs Field 2013-12-18
Poly 0.55 Reference: Centroid
25
Figure 12 : Diagramme des taches du système à trois lentilles. On remarque que la taille du spot augmente avec le champ de vue.
Surface: IMA 1000 0.0 0 OBJ: 0.00 (deg) IMA: 0.000 mm OBJ: 15.00 (deg) IMA: 27.015 mm OBJ: 30.00 (deg) IMA: 54.856 mm OBJ: 50.00 (deg) IMA: 94.239 mm OBJ: 70.00 (deg) IMA: 135.925 mm 0.5500 triplet 2.zmx Configuration 1 of 1 Spot Diagram 2013-07-02 Units are µm. Field : 1 2 3 4 5 RMS radius : 260.510 383.794 470.297 378.118 1240.07 GEO radius : 450.350 1042.84 1195.06 1004.56 2597.07
26
Figure 13 : Illumination relative du système à trois lentilles
On remarque que les performances de ce système, malgré le nombre plus élevé de variables, sont très loin de s’approcher des performances du système monocentrique. Cette observation est en accord avec des travaux précédents faits sur des systèmes à plus petits champs de vue [26]. L’illumination relative est aussi problématique dans ce cas-ci. Pour régler ce problème, il faudrait augmenter la taille de la pupille d’entrée pour des champs de vue élevés. Une surface asphérique pourrait être utilisée pour remplir cette fonction.
Un senseur ayant une courbure sphérique peut donc être utilisé pour concevoir des optiques panoramiques plus performantes et plus compactes en compensant une courbure de champ régulière (sphérique) lors de la conception. Par contre, on peut aussi utiliser le senseur courbé pour corriger un système après sa conception et ceci, pour tout genre de courbure de champ.
2.1.2 Correction d’optique existante
Dans le cas d’une optique conçue de manière traditionnelle, il est possible que la forme de la courbure de champ ne soit pas sphérique (voir figure 2). La fabrication d’un
0 7 14 21 28 35 42 49 56 63 70 Y Field in Degrees 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 triplet 2.zmx Configuration 1 of 1 R ela tiv e Ill umi nat ion Relative Illumination 2013-07-02 Wavelength: 0.550000 µm
![Figure 1 : Exemple de téléphoto inversé : « Edgard Hugues ; usp 3468600; F/2.5 90 DEG wide angle objective », tiré de la référence [3]](https://thumb-eu.123doks.com/thumbv2/123doknet/6741020.185868/22.918.128.747.113.442/figure-exemple-téléphoto-inversé-edgard-hugues-objective-référence.webp)
![Figure 2 : Exemple de fish-eye : « Mitsuaki Horimoto; USP 4256373; F/2.8 180 DEG. Fish-Eye Lens #7 », tiré de la référence [3]](https://thumb-eu.123doks.com/thumbv2/123doknet/6741020.185868/24.918.176.802.115.483/figure-exemple-mitsuaki-horimoto-fish-lens-tiré-référence.webp)