Right Harmonic Spectrum for the back-electromotive force of a n-phase synchronous motor
Texte intégral
Figure


Documents relatifs
As an alternative to using standardized biomarker levels, some authors include sampling characteristics as covariates in regression models describing associations between
But in fact, our results can be compared to the Multifluid approach with a first order scheme and no velocity dispersion, as this method captures naturally the effects that are
In the previous work, the sensitivity analysis was performed on a parallel asynchronous cellular genetic algorithm [2] for scheduling of independent tasks in a computational grid..
However, for creeping test, when the tensile test is interrupted and the axial stress is kept constant, the material stores no more elastic energy and the obtained volume
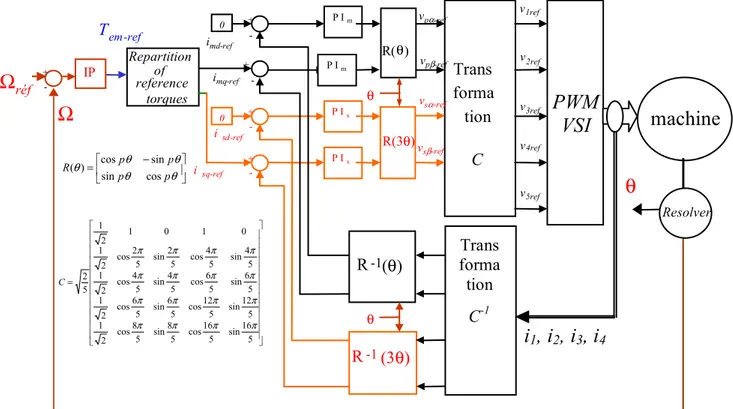
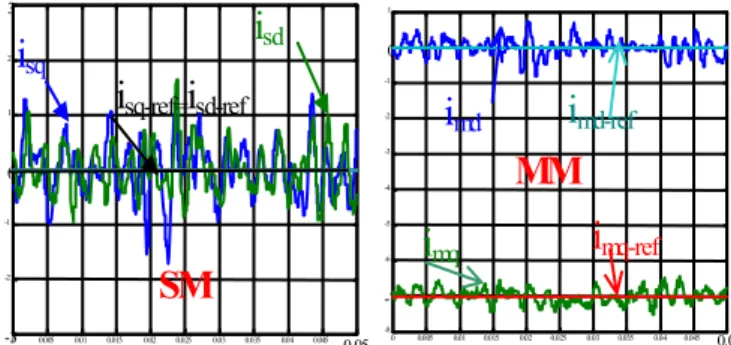
controller in the D-Q frame and the total compensation controller with integrators, we shall impose same proportional and integral action for the closed loop on the axis Q.
The present paper is devoted to the computation of two-phase flows using the two-fluid approach. The overall model is hyperbolic and has no conservative form. No instanta- neous
A Two-Dimensional Relaxation Scheme for the Hybrid Modelling of Gas-Particle Two-Phase Flows.. Kateryna Dorogan,
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
