Commande des actionneurs piézoélectriques
Texte intégral
Figure
Documents relatifs
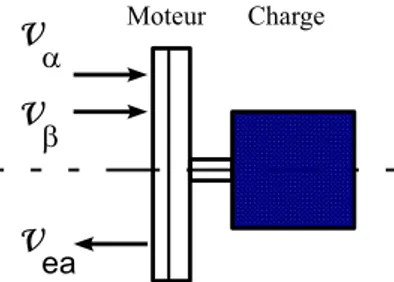
Pour un déplacement à vide (Fa=0) pour le graphe de vitesse donné dans le document réponse, calculer et tracer l’évolution du couple moteur sur le graphe... Un tracé du couple
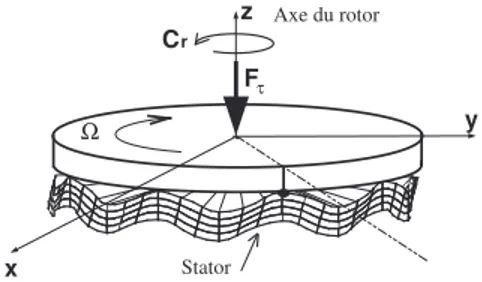
Dans cette thèse notre recherche porte sur la réalisation d‟un système mécanique permettant de crée une excentricité statique réglable sur les deux cotés
La simulation du modèle du moteur asynchrone avec un rotor sain donne, pour la vitesse, la courbe de la figure (II.6.a). Le couple électromagnétique est présenté à la figure
En effet, ces moteurs ne possèdent pas de couple de démarrage et le champ statorique tournant qui s'établit à la mise sous tension du moteur à une vitesse de rotation bien trop
On appelle temps d’´etablissement 3 le temps que met la sortie d’un syst`eme stable `a atteindre son ´equilibre, `a partir d’une variation de l’entr´ee en ´echelon.. On
Nos exp´ eriences ont montr´ e qu’un syst` eme simple, sans suspension, sans couple moteur, ´ etait suffisant pour d´ eclencher le ph´ enom` ene.. Nous avons ´ egalement mis en
Un rotor de queue (d’axe horizontal) entraîné, lui aussi, par le moteur, équilibre le couple résistant du rotor principal et permet le contrôle de l’appareil
Ensuite dans le cadre de la poursuite de trajectoire d’un moteur dont les sorties sont mesur´ees `a l’aide d’un capteur cam´era, nous avons d´evelopp´e un
