Étude ontogénétique des mécanismes perceptuels, moteurs et de contrôle sous-tendant la coordination visuo-manuelle d'interception d'un stimulus en mouvement
118
0
0
Texte intégral
(2) AVANT-PROPOS. Je tiens à remercier le Dr Chantai Bard, professeur titulaire au DEP de l'Université Laval, qui a bien voulu m'encadrer dans l'élaboration et la réalisation de ce projet.. Je reconnais â mon directeur de thèse. sa compétence, sa disponibilité et la valeur de son expérience dans le domaine de la recherche.. Mes remerciements vont aussi à mon co-directeur. le Dr Michel le Fleury, qui malgré ses différentes occupations en tant que professeur et directrice de programme, ne cesse de manifester une disponibilité de tout moment.. Ses conseils et ses encouragements sont. d'une valeur incontestable. Merci aussi au Dr Paul Godbout pour ses con seils pertinents dont j'ai bénéficié le long de toute ma formation. -Ma profonde gratitude va à Geneviève et Mehdi -A ma mère, mon père et à tous les miens. Je remercie le MEN Marocain de m'avoir accordé un détachement pour que je puisse vivre cette expérience, sans pour autant oublier l'apport financier de l'ACDI et du MAIG du Québec. sujets:. Mes remerciements à tous nos. enfants de la Commission scolaire de Ste-Foy et étudiants gradués. et sous-gradués de l'Université Laval qui ont accepté de collaborer avec nous au cours de l'expérimentation. A tous les professeurs et au personnel du LABSAP et du Département, à tous les collègues étudiants gradués, et à tous ceux qui m'ont aidé de près ou de loin, je dédie cette humble recherche en toute sincérité..
(3) RESUME. L'interception d'un objet mobile implique une synchronisation tem porelle et spatiale reposant sur l'anticipation, i.e., la prévision. Cette synchronisation pourrait être fonction de plusieurs facteurs â savoir:. - l'assistance apportée au programme moteur par le système. visuel, - les facteurs liés au stimulus mobile, comme sa vitesse par exem pie, et - les facteurs liés à l'expérience de l'individu et sa capacité à prédire. Cette étude a été entreprise dans un cadre ontogénétique pour analy ser les mécanismes de contrôle et de programmation liés à l'évolution de l'individu, dans une tâche d'anticipation-coïncidence.. Elle porte sur. les enfants de 6, 9, 11 ans et les adultes, et elle englobe trois expé riences.. Il est à préciser que l'appareillage et la tâche sont les mêmes. pour toutes les expériences.. La seule différence se situe au niveau des. conditions expérimentales caractérisant chaque expérience.. Dans la pre. mière aucune contrainte n'est imposée aux sujets, dans la deuxième les conditions de tête (tête fixe versus tête libre) et de feedback (vision ou non vision du membre actif) ont été manipulées, et dans la troisième expérience, à laquelle seuls les adultes ont participé, la manipulation a porté sur les conditions de l'oeil:. oeil mobile ou oeil fixe.. La tâche consiste à effectuer une extension horizontale du bras dans un plan sagittal (amplitude s 30 cm) pour terminer le mouvement en coïnci dence avec l'arrivée du stimulus au centre du support. Le. mouvement.
(4) apparent est créé à partir de 89 photodiodes à allumage successif espacées de 5 cm, et se déplace sur un support de 440 cm à des vitesses variées. La provenance du stimulus est aléatoire.. Six variables ont été retenues. pour cette étude: l'erreur temporelle absolue, l'erreur temporelle rela tive, l'erreur spatiale absolue, l'erreur spatiale relative, le temps de réaction et le temps de mouvement. Il ressort des résultats de ces expériences que:. (1) la capacité. d'anticipation-coïncidence se développe et s'améliore avec l'âge.. Les. enfants de 6 ans sont différents des autres groupes d'âge pour l'erreur temporelle et pour l'erreur spatiale; (2) la vitesse a un effet signifi catif sur la précision terminale et le temps de mouvement, i.e., tous les sujets sont plus précis et enregistrent des TM plus rapides en vitesse rapide qu'en vitesse lente; (3) tous les sujets sont plus précis quand le stimulus provient de gauche (d^) que lorsqu'il provient de droite (dg), exception faite des enfants de 6 ans; (4) peu importe l'âge, tous les sujets sont plus précis en boucle fermée qu'en boucle ouverte; (5) les sujets enregistrent moins d'erreurs avec la tête stabilisée qu'avec la tête mobile; et (6) lorsque l'oeil poursuit la cible mobile, on enregistre des erreurs plus importantes dans la précision temporelle pour les mouve ments apparents rapides..
(5) TABLE DES MATIERES. Page. A V A N T - P R O P O S .............. -....................................... i. R E S U M E ......... ........................... -............. -..... -. ii. TABLE DES M A T I E R E S ........................... -...........-...... iv. LISTE DES T A B L E A U X ............................................... vii. LISTE DES F I G U R E S ...... -............. -.......................... ix. CHAPITRE I. INTRODUCTION ............................................. 1. CHAPITRE II. ETAT DE LA QUESTION — ................................... ... 4. La perception du mouvement et les activités de capture -------------------------------. 7. L'élaboration de la réponse manuelle: la mesure du t e m p s -------------------------------------. 12. Le TR de. en fonction de lacomplexité la t â c h e --------------------------------------------. 14. Le TR. en fonction. de l ' â g e ----------------------------. 14. de m o u v e m e n t -------------------------------------. 15. Le temps. La précision et le rôle du feedback visuel dans une tâche d'anticipation-coincidence -----------. 15. Les h y p o t h è s e s ---------------------------------------------. 21.
(6) V. Page. METHODOLOGIE .................................... 22. Les s u j e t s --------------------------------------------------. 22. La tâche et l'appareillage --------------------------------. 22. La procédure expérimentale --------------------------------. 23. Les v a r i a b l e s ----------------------------------------------. 26. Le traitement statistique ---------------------------------. 27. Les r é s u l t a t s ----------------------------------------------. 27. La précision temporelle -----------------------------. 27. L'erreur temporelle absolue ------------------------L'erreur temporelle relative ------------------------. 27 31. La précision spatiale --------------------------------. 31. L'erreur spatiale absolue --------------------------L'erreur spatiale relative --------------------------. 31 31. Le temps de réaction ------------------------------. 44. Le temps de mouvement --------------------------------. 44. C o n c l u s i o n --------------------------------------------------. 44. EXPERIENCE I. EXPERIENCE II. METHODOLOGIE .................................... 50. Les s u j e t s --------------------------------------------------. 50. La tâche et l'appareillage--------------------------------. 50. La procédure expérimentale --------------------------------. 50. Les v a r i a b l e s ----------------------------------------------. 51. Le traitement statistique ---------------------------------. 51. Les r é s u l t a t s ----------------------------------------------. 53. La précision temporelle -----------------------------. 53.
(7) vi. Page. L'erreur temporelle absolue ------------------------L'erreur temporelle relative ------------------------. 53 53. La précision spatiale — *■ ----------------------------. 61. L'erreur spatiale absolue ---------------------------. 61. Le temps de mouvement --------------------------------. 75. C o n c l u s i o n --------------------------------------------------. 75. EXPERIENCE III. METHODOLOGIE ..... ...................— ........ 82. Les s u j e t s --------------------------------------------------. 82. La tâche et l'appare i llage--------------------------------. 82. La procédure expérimentale --------------------------------. 83. Les v a r i a b l e s ----------------------------------------------. 83. Le traitement statistique ---------------------------------. 83. Les r é s u l t a t s ----------------------------------------------. 84. La précision temporelle -----------------------------. 84. L'erreur temporelle absolue ------------------------L'erreur temporelle relative ------------------------. 84 84. La précision spatiale — ------------------------------. 90. Le temps de mouvement --------------------------------. 90. C o n c l u s i o n --------------------------------------------------. 90. CHAPITRE IV. DISCUSSION G E N E R A L E ................. -......... 91. C O N C L U S I O N ........................................................ 96. BIBLIOGRAPHIE — ............................................. —. 98.
(8) LISTE DES TABLEAUX. Page EXPERIENCE I Tableau 1 :. Analyse de variance pour l'erreur temporelle absolue --------------------------------. 28. Moyenne pour l'erreur temporelle a b s o l u e --------------------------------------------. 30. Analyse de variance pour l'erreur temporelle absolue --------------------------------. 33. Tableau 4 : Analyse de variance pour l'erreur spatiale absolue ----------------------------------. 35. Tableau 5 : Moyenne pour l'erreur spatiale absolue en fonction de l ' â g e -------------------. 36. Tableau 2 : Tableau 3 :. Tableau 6 :. Analyse de variance pour l'erreur spatiale relative ---------------------------------. 38. Tableau 7 : Moyenne pour T e r r e u r spatiale relative en fonction de l'âge -------------------. 40. Tableau 8 : Analyse de variance pour le temps de r é a c t i o n ---------------------------------------. 45. Tableau 9 :. Analyse de variance pour le temps de m o u v e m e n t --------------------------------------. 47. Analyse de variance pour l'erreur temporelle absolue --------------------------------. 54. Moyenne pour l'erreur temporelle absolue en fonction de l ' â g e -------------------. 56. Moyenne pour l'erreur temporelle absolue en fonction de 1 'âge-tête ----------------. 57. EXPERIENCE II Tableau 10: Tableau 11: Tableau 12:.
(9) viii. Page EXPERIENCE II (suite) Tableau 13: Tableau 14: Tableau 15: Tableau 16: Tableau 17: Tableau 18:. Tableau 19:. Analyse de variance pour l'erreur temporelle r e l a t i v e ------------------ ----- ------. 59. Moyenne pour l'erreur’temporelle relative en fonction de l'âge --------------------. 63. Moyenne pour l'erreur temporelle relative en fonction de la vitesse-âge ----------. 65. Moyenne pour l'erreur temporelle relative en fonction de 1 'âge-direction ---------. 67. Analyse de variance pour l'erreur spatiale absolue ----------------------------------. 69. Analyse de variance pour l'erreur spatiale relative ---------------------------------. 72. Analyse de variance pour le temps de m o u v e m e n t --------------------------------------. 77. EXPERIENCE III Tableau 20: Tableau 21:. Analyse de variance pour l'erreur temporelle absolue --------------------------------. 85. Analyse de variance pour T e r r e u r temporelle relative ------------------------------. 87.
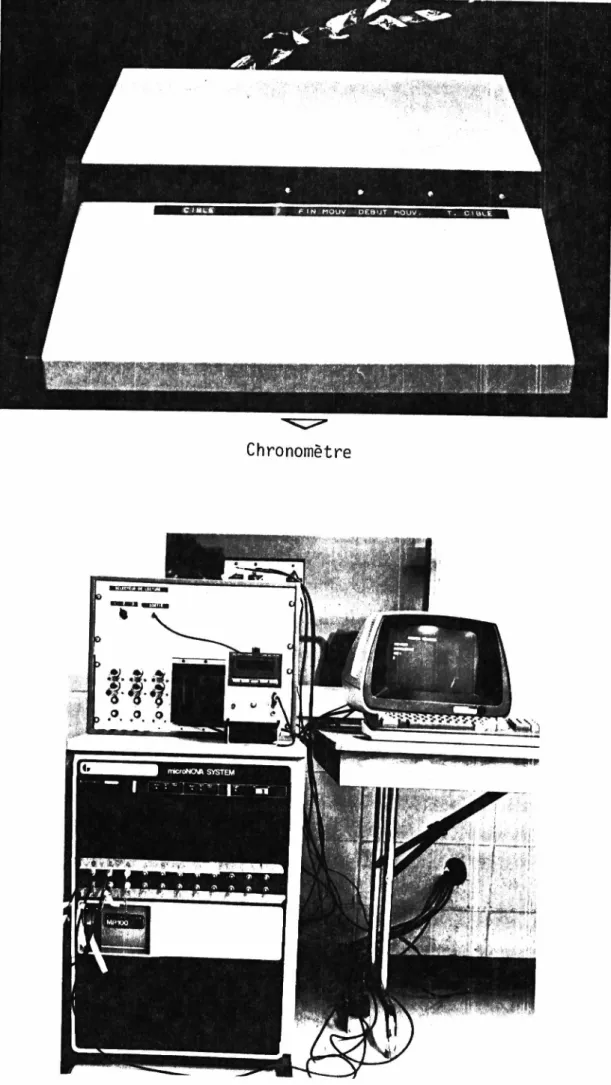
(10) LISTE DES FIGURES. Page L'appareillage: cible et potentiomètre ---------------. 24. Le système de contrôle et d'enregistrement des données. 25. L'erreur temporelle absolue en fonction de 1 'âge -----------------. 29. L'erreur temporelle absolue en fonction des vitesses -------------. 32. L'erreur temporelle relative en fonction des vitesses -------------. 34. L'erreur spatiale absolue en fonction de 1 'âge -----------------. 37. L'erreur spatiale relative en fonction de l'âge -----------------. 39. L'erreur spatiale relative en fonction des directions -----------. 41. L'erreur spatiale relative en fonction des vitesses -------------. 42. L'erreur spatiale relative en fonction de 1 'âge-vitesse ---------. 43. Le temps de réaction par rapport à la localisation du mouvement apparent. 46. Le temps de mouvement en fonction des v i t e s s e s --------------------------. 48.
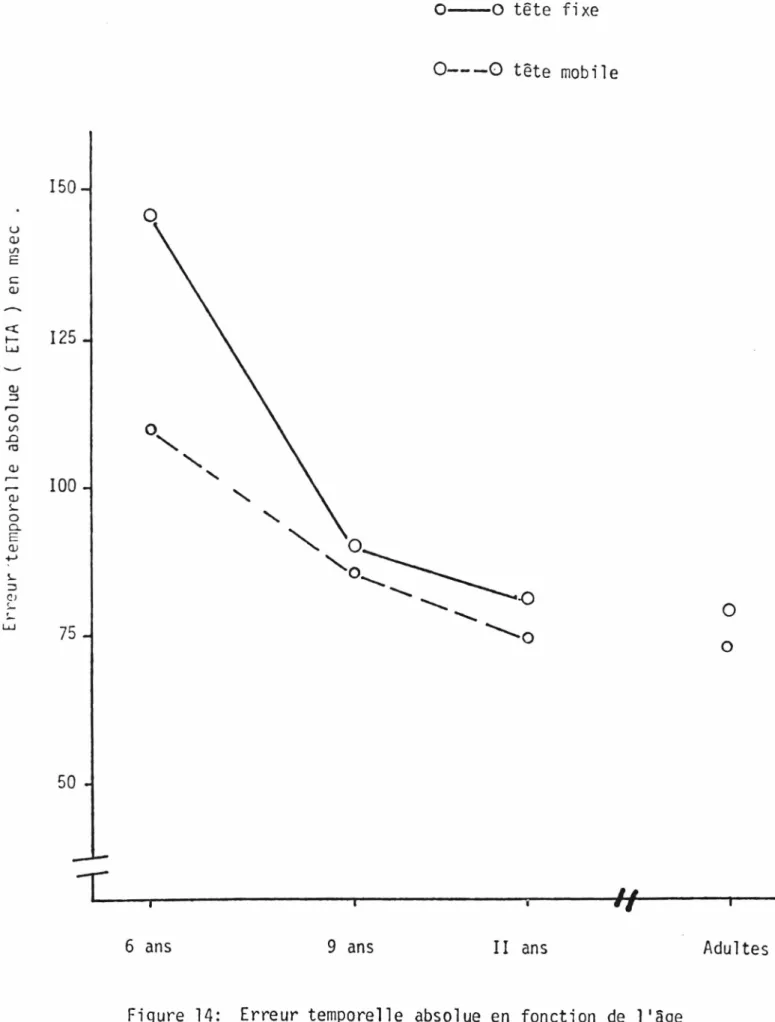
(11) X. Page EXPERIENCE II Figure 13:. Situation expérimentale ---------------------------. Figure 14:. L'erreur temporelle absolue en fonction de l'âge-tête----------------------------. 58. L'erreur temporelle relative en fonction de l ' â g e ---------------------------------. 62. L'erreur temporelle relative en fonction des conditions de t ê t e -------------------. 64. L'erreur temporelle relative en fonction de l'âge et de la v i t e s s e ---------------. 66. L'erreur temporelle relative en fonction de l'âge et de la d i r e c t i o n -------------. 68. L'erreur spatiale absolue en fonction des b o u c l e s ------------------------------. 71. L'erreur spatiale relative en fonction des b o u c l e s ------------------------------. 74. L'erreur spatiale relative en fonction de la tête-direction --------------------. 76. Temps de mouvement en fonction de conditions de t ê t e -----------------------------. 79. Temps de mouvement en fonction des v i t e s s e s ---------------------------------------. 80. Figure 15: Figure 16: Figure 17: Figure 18: Figure 19: Figure 20: Figure 21: Figure 22: Figure 23:. 52. EXPERIENCE III Figure 24: Figure 25: Figure 26:. L'erreur temporelle absolue en fonction des conditions de l'oeil et des v i t e s s e s --------. 86. L'erreur temporelle relative en fonction des vitesses -----------------------------. 88. L'erreur temporelle relative en fonction des conditions de l'oeil et des v i t e s s e s --------. 89.
(12) CHAPITRE I. INTRODUCTION. L'importance que revêt l'anticipation dans le cadre des théories de l'habileté comportementale est incontestable et les investigations sur les caractéristiques perceptuelles et motrices du comportement anticipatoire sont d'actualité (Requin, 1980).. La classe des habiletés antici-. patoires, connue sous le nom d'anticipation-coïncidence, a reçu, quant à elle, une attention particulière du fait qu'elle imbrique les composantes fondamentales de tout un engrenage de comportements complexes que l'on retrouve dans la vie de tous les jours et dans les diverses sphères de l'activité physique. Dans une tâche d'anticipation-coïncidence le sujet est confronté à une réalité d'événements où il est nécessaire de prédire le temps et le lieu où va se produire l'événement pour enfin faire coïncider sa réponse avec les exigences extérieures. Dans de nombreuses circonstances, l'anticipation facilite et rend efficace la synchronisation spatio-temporelle.. Ainsi, le sujet doté. d'une capacité d'anticiper adéquate peut réagir plus tôt à une situation qui survient et disposer de plus de temps pour produire la réponse motrice.. De ce fait, la performance d'un mouvement ou d'une habileté. motrice sollicite du performant une prise en considération des caracté ristiques spatiales et temporelles de son geste et de l'environnement. Les relations spatiales ne peuvent être intégrées que lorsque l'individu prend en considération la nature de l'espace où il se déplace et les caractéristiques des objets qu'il affronte, de même que les liens temporaux (rythme et séquence) de ses mouvements..
(13) 2. Les définitions de Belisie (1963) et de Stadulis (1971), semblent fournir les éléments de base pour notre travail.. Selon ces auteurs la. tâche d'anticipation-coïncidence engloberait deux composantes: (1). La coïncidence qui se réfère à l'habileté du sujet à prédire quand le stimulus arrivera au point d'interception (anticipation des récepteurs);. (2). L'anticipation qui se réfère à la capacité du sujet à estimer son temps de réaction et à planifier sa réponse pour qu'elle coïncide avec l'arrivée du stimulus (anticipation de l'effecteur).. Elle. requiert au moins, selon Stadulis (1971), les trois étapes suivantes: (1) une phase de poursuite visuelle où le sujet doit détecter le stimulus et identifier ses caractéristiques; (2) une phase d'inté gration sensori-motrice, où l'individu après avoir prédit le moment d'arrivée du stimulus, programme sa réponse motrice; (3) une phase d'exécution. Dans une tâche de coordination visuo-manuelle, avant l'élaboration de la réponse elle-même, il s'écoule un délai que les scientifiques appellent le temps de latence, connu sous le nom de temps de réaction (TR).. Selon les théoriciens du comportement moteur, il correspond à. l'intervalle du temps entre l'apparition du stimulus (localisation, identification) et l'initiation de la réponse. Cette étude a été entreprise dans un profil ontogénétique pour combler une lacune dans les recherches qui touchent le domaine de 1 'anticipationcoïncidence. Beaucoup de chercheurs intéressés par ce phénomène se sont impliqués dans le secteur par le biais d'études sur les enfants (Bard et al., 1981, 1983; Dunham, 1977; Pavlis, 1972; Stadulis, 1971; ) ou sur les adultes (Haywood, 1983), rares sont ceux qui intègrent les deux caté gories (Haywood, 1980).. La présente recherche vise aussi à établir un. tracé évolutif de tout un processus de mise en place de mécanismes com plexes qui doivent leur perfectionnement et leur amélioration à l'évolution génétique de l'individu.. Cette complexité commence à faire surface juste. au moment où notre curiosité nous pousse à découvrir ce qui se passe.
(14) 3. au niveau central et périphérique derrière 1'«observable», i.e., avant et pendant le mouvement.. L'interception d'un objet mobile implique une synchronisation tempo relle et spatiale reposant sur l'anticipation, i.e., la prévision.. On a. suggéré dans cette étude menée sur les enfants de 6, 9, 11 ans et les adultes des deux sexes que cette synchronisation pourrait être fonction de différents facteurs à savoir:. (1) l'assistance apportée au programme. moteur par le système visuel (Eidson et al., 1983; Stubbs, 1976; Sullivan et al., 1983; Zelaznik et al., 1983); (2) les facteurs associés au stimulus mobile, e.g., sa vitesse, sa direction, sa durée ... (Dunham, 1977; Newell et al., 1980; Williams, 1968); (3) l'apparition avec l'âge de la capacité à prédire (Singer, 1980). La présente étude fut entreprise pour vérifier dans quelle mesure et à quel âge un être humain pouvait profiter du feedback visuel et éventuellement s'adapter à diverses vitesses de trajectoires pour faire coïncider son mouvement avec l'arrivée d'un stimulus mobile.. Elle vise. également à étudier la possibilité d'existence de stratégies oculocéphaliques faci1itatrices..
(15) CHAPITRE II. ETAT DE LA QUESTION. L'être humain vit et évolue dans un monde en perpétuels mutations et déplacements.. Cet environnement nécessite une synchronisation spatio-. temporelle mettant en jeu l'individu et les objets.. Cela nous amène à. dire que le temps comme l'espace sont des dimensions fondamentales de toutes nos actions (Fraisse et Orsini, 1955).. La coordination de ces. deux aspects (spatial et temporel) et leur conjugaison dans une série de mouvements déterminent le succès dans la performance en sports.. Un bon. joueur estimera la position future de la balle d'après un petit nombre d'indices et de signaux survenant très tôt (Alegria, 1980; Bard et FLeury, 1976; Bard, 1982; Keller et al., 1979).. C'est ainsi qu'un relanceur au. tennis initie sa réponse après une prise d'information sur les indices pertinents exhibés par le serveur (placement de balle, position de la raquette, bruit de la balle, etc ...) pour déterminer la trajectoire de la balle, sa vitesse et éventuellement son point de chute (Hennemann et Keller, 1983).. Ce qui fait la différence entre le débutant et l'expert,. c'est en partie cette aptitude à prédire les événements futurs à partir des premiers signaux d'une séquence invariable. En sports collectifs, la perception et l'anticipation des déplace ments de la balle, des adversaires et des partenaires revêtent une impor tance capitale.. C'est ainsi qu'on parle d'une perception complexe de.
(16) 5. l'espace et du mouvement, car il ne suffit pas de percevoir les objets et les processus sous leur forme brute et instantanée. Tout processus a un passé, un présent et un futur (Parlebas, 1970). L'anticipation implique une prédiction spatio-temporelle et c'est l'interaction de ces deux dimensions qui va déterminer l'efficacité de la réponse donnée. réponse motrice.. Cette anticipation est aussi liée à la vitesse de la En effet, l'intériorisation par le sujet de sa vitesse. de mouvement est indispensable. sir le moment d'initiation. Cette intériorisation. permettra de choi. de la réponse car, en plus de prédire. où. sera. l'objet, le joueur doit savoir où il sera lui-même au moment du contact. L'anticipation de l'événement lorsqu'elle est exacte accélère la percep tion et la réponse, toutefois, si elle s'avère fausse, elle amène des retards perceptuels dus à un temps de réaction plus lent (Whiting, 1970).. En bref, dans plusieurs activités physiques, l'athlète est direc tement confronté à des objets en mouvement auxquels il doit apporter une réponse.. L'efficacité de cette réponse dépend de son habileté à inter. cepter l'objet en déplacement avec précision.. Un joueur habile est cer. tainement celui qui peut faire preuve d'une perception efficace pour analyser, intégrer et réagir aux signaux visuels dans des situations ins tables. L'étude des problèmes perceptuels, dans la vie de tous les jours, et surtout en activité physique, n'a pris de l'ampleur que durant ces dernières décennies, et peu de recherches ont été orientées jusqu'ici vers la détermination et la définition des paramètres qui pourraient éventuellement affecter la précision des jugements visuo-perceptuels impliqués dans des situations dynamiques de jeu. Dès qu'un individu s'engage dans la réalisation d'une activité mo trice, il se produit une profonde réorganisation fonctionnelle des sys tèmes qui vont contribuer aux diverses phases de l'élaboration et de l'exécution du programme d'action (Coquery, 1978).. Cette réorganisation. n'est pas le résultat d'un processus non spécifique qui conduirait à faci liter la réalisation de n'importe quelle activité motrice, il s'agit au.
(17) 6. contraire d'une réorganisation qui présente une spécificité vis-à-vis des caractéristiques particulières du mouvement projeté, prenant en compte notamment les éléments du programme qui détermineront ses paramè tres biomécaniques. que:. Comme le mentionne Paillard (1976), on pourrait dire. l'existence d'activités nerveuses «programmées» suppose en fait. l'opposition sur le réseau des connectivités neuroniques d'une certaine organisation structurale suffisamment stable pour constituer une «structure de code» susceptible d'engendrer les instructions qui vont définir le déroulement séquentiel et coordonné des activités musculaires qui vont déterminer le programme d'action.. Le mouvement le plus simple qui soit. met en jeu tous les mécanismes de la machine humaine; car pour qu'une bonne coordination se manifeste, un groupe musculaire approprié doit être sélectionné.. Chaque muscle contracté doit être activé dans une séquence. de temps appropriée en relation à d'autres muscles, pour ainsi établir le mécanisme de facilitation et d'inhibition, faciliter le muscle agoniste qui génère le mouvement et inhiber l'antagoniste qui s'oppose à ce mouve ment.. Pour se faire et pour débuter la contraction d'un groupe musculaire,. le système nerveux doit contrôler les effets de sa commande et ainsi une bonne coordination pourra être établie à différentes parties du corps. Dans une tâche d'anticipation-coïncidence (Bard et al., 1981; Belisle, 1963; Haywood, 1983; Stadulis, 1971), l'élaboration de la réponse, i.e., du mouvement du bras dirigé vers un objectif visuel bien précis (fin de la trajectoire du stimulus) dans le but de déterminer sa position et sa localisation spatiale, comporte plusieurs composantes:. (1) la capture. de la cible qui apparaît dans le champ visuel, son identification et l'élaboration d'un projet d'action tenant compte des caractéristiques spatiales; (2) le transport balistique de la main vers cette cible selon une trajectoire programmée avant l'initiation du mouvement; (3) une prise en charge plus ou moins importante par les mécanismes de feedback visuel en vue d'une atteinte précise (Paillard, 1971). La coordination visuo-manuelle représente un des éléments de base de la construction de l'espace, et l'étude du développement des diffé rents mécanismes impliqués soulève une problématique intéressante.. L'éla. boration d'une réponse peut ainsi être circonstrite par des paramètres.
(18) 7. temporels et spatiaux de la réponse motrice.. Le temporel englobe le temps. de réaction (TR), qui caractérise la latence, i.e., la période qui s'étend entre la présentation du stimulus et l'initiation de la réponse.. Le TR. réflète la vitesse avec laquelle le sujet peut percevoir et répondre à l'environnement.. Le temporel englobe également le temps de mouvement. (TM), i.e., temps qui s'écoule entre l'initiation du mouvement jusqu'à la terminaison de la réponse.. Les temps de réaction et de mouvement sont. de fait les mesures les plus fréquemment utilisées dans les études compor tementales.. L'erreur temporelle que peut faire le sujet par rapport à. l'arrivée du stimulus peut se manifester par une réponse motrice en pré coce ou retardée. Le spatial est mesuré par l'écart entre la position terminale du bras et la localisation terminale de la cible. Dans une tâche d'anticipation-coïncidence, l'élaboration de schèmes d'action et la mise au point d'un programne moteur, pour rendre efficace le transport de la main vers une cible visuelle, se fait selon une suite logique respectant T o r d r e chronologique des phases citées précédemment (Stadulis, 1971).. Ceci nous amène à parler. a) des activités de capture. (détection, identification, localisation) mettant en jeu l'oeil princi palement et le phénomène combiné et coordonné des mouvements oeil-tête, b) du temps de réponse, i.e., du temps de réaction et du temps de mouve ment, et c) du rôle du feedback visuel dans l'orientation et l'ajustement quant au transport du bras pour intercepter le mouvement apparent.. La perception du mouvement et les activités de capture Le système oculomoteur place la fovéa sur la cible et la garde sur elle en utilisant plusieurs systèmes de contrôle (Gouras, 1982) qui empruntent la même voie effectrice, il s'agit:. du mouvement saccadique. (saccade oculaire), du mouvement de poursuite régulière, du mouvement optokinétique, du réflexe vestibulo-oculaire, du mouvement de vergence..
(19) 8. Si T o n prend en considération les mouvements de l'oeil et de la tête qui suivent la présentation non prévisible d'une cible visuelle, chez l'humain ou chez le singe on remarque que l'apparition de la cible dans le champ visuel suscite une séquence de mouvements à savoir, en pre mier lieu la saccade oculaire caractérisée par le mouvement rapide de l'oeil, i.e., un mouvement balistique préprogrammé (Pautrizel et al., 1981) en ce sens qu'une fois initié, il est difficile de lui apporter des corrections dans sa trajectoire.. Cette saccade fait appel à la sen. sibilité de la rétine et de la fovéa à l'image de la cible.. En deuxième. lieu et après un délai de 20 à 40 msec, la tête tourne dans la même direc tion que la saccade.. La vélocité du mouvement de l'oeil est assez élevée. de telle sorte qu'elle arrive à fixer la cible alors que la tête n'a pas encore terminé son mouvement.. Durant la période où la tête achemine son. déplacement, les yeux maintiennent la fixation de la cible en effectuant un mouvement de rotation inverse à celui de la tête.. Ce jeu de mouvement. qu'on peut appeler mouvement compensatoire de l'oeil permet à la fovéa de rester constamment sur la cible.. L'ultime but de cette séquence de. mouvement est d'aligner les yeux et la tête en direction de la cible pour ainsi la fixer sur la fovéa.. Pour y parvenir, le sujet doit mettre en. jeu un grand nombre d'estimations, entre autres l'évaluation de la dis tance anyulaire entre les lignes initiales du regard et la position de la. cible qui apparaît dans le champ visuel. Les mouvements oculaires sont particulièrement étudiés comme modèle. de programme topocinétique dégagés des contraintes posturales (Paillard, 1980).. La coordination des mouvements des yeux avec ceux de la tête a. récemment conduit à des données majeures pour la compréhension des mécanismes généraux de la programmation motrice (Bizzi, 1974; Bizzi et al., 1976). L'activation des muscles de l'oeil et de la nuque engendre non seulement les mouvements des yeux et de la tête, mais provoque également l'activation d'un grand nombre de récepteurs sensoriels (propriocepteurs) pour ne citer que les muscles de la nuque (fuseaux neuro-musculaires), les récepteurs localisés dans les articulations des vertèbres (niveau cervical) et les récepteurs localisés dans l'oreille interne.. Les.
(20) 9. informations une fois intégrées donneront naissance, de façon directe ou indirecte, à des impulsions nerveuses au cours du déplacement de la tête. Cizzi et al. (1976) ont pu démontrer que les mouvements compensatoires des yeux sont le résultat d'une action réflexe du système vestibulaire. Comme conséquence, et à travers les mouvements de la tête, les récepteurs vestibulaires sont stimulés et leur activité provoque un mouvement com pensatoire de l'oeil qui permet. à’ la fovéa de conserver la fixation d'un. espace visuel bien déterminé (cible) au moment où la tête effectue sa rotation.. On peut se demander jusqu'à quel point la coordination oeil-. tête va être affectée si l'input vestibulaire est mis en cause et se voit éliminé de tout un système raffiné et synchronisé? Il a été démontré (Bizzi, 1974) qu'après la destruction du système vestibulaire chez le singe, le système oculaire devient capable de prendre en charge les fonctions de stabilisation qui étaient auparavant sous l'égi de de l'oreille interne.. Privé de ce système modulateur qu'est le système. vestibulaire, le singe n'a plus de signaux de feedback à la suite desquels il pourrait éventuellement contrôler et surtout corriger l'amplitude de ses saccades afin de capter la cible.. Mais après deux à trois mois le. singe déafférenté est capable après réapprentissage de développer le mou vement compensatoire de l'oeil sans l'aide du feedback vestibulaire, et de faire de petites saccades quand il tourne sa tête pour arriver finale ment à fixer cet espace visuel.. Devant une telle déficience, le système. oculaire trouve une efficacité dans un mécanisme de recalibration; le système moteur central présente une plasticité et pourrait éventuellement s'adapter à des situations de contraintes ou de déficience. L'initiation des saccades et des mouvements de tête est basée sur une estimation rapide de la localisation de la cible, réalisée par les zones corticales et sous corticales.. Que disent les écrits du côté. ontogénétique? De nombreux travaux récents ont mis en évidence chez le bébé le rôle des informations visuelles dans les réponses posturales à l'envi ronnement.. Il en ressort qu'une coordination s'établit très précocement. entre le système visuel et le système vestibulaire.. D'urie façon très.
(21) 10. globale (Jouen et Bloch, 1981), dès les premières semaines de la vie le nourrisson répond à des variations du champ visuel par des réajustements posturaux systématiques. Le système vestibulaire qui assure une fonction essentielle dans le positionnement antigravitaire, se développe très tôt durant la phase em bryonnaire (dès la 8ème ou 9ème semaine de la vie foetale) et il devient complètement fonctionnel à 32 semaines (Schulte et al., 1969).. Le segment céphalique constitue par ailleurs, un des maillons essen tiels dans la chaîne posturale qui permet l'orientation du corps dans l'espace (Paillard, 1971, 1974).. D'une part, la tête porte les principaux. organes de capture des informations sensorielles, dont le système visuel et le système labyrinthique (Tronick et Clanton, 1971); d'autre part, le segment céphalique est l'élément déterminant dans l'établissement des adaptations posturales (Roll et al., 1981). Il ressort des récents écrits que les réponses oculomotrices sont facilement observables chez le bébé (Casaer, 1979) et semblent appartenir à 1%.gamme des comportements visuels présents dès la naissance. McGinnis (1930) a soutenu que la. Même si. poursuite est absente durant les deux. premières semaines de la vie, néanmoins on reconnaît que dès le début de la vie, le nouveau-né est capable de fixer et de suivre un stimulus visuel en mouvement (Brazelton et al., 1966; Graham, 1956). poursuite visuelle a été observée après la naissance.. Cette capacité de Il ressort égale. ment des études de White, Castle et Held (1964), Wolf et White (1965) et Fonarev (1966) que le nouveau-né peut suivre des yeux un stimulus sur un arc de cercle de 90°.. Selon Wolf (1965), cette poursuite s'accompagne. dès le 4e jour d'une rotation conjointe de la tête. en évidence deux types de poursuite:. Cela vient mettre. la poursuite oculaire et la pour. suite oculocéphalique. D'après leurs travaux Kremenitzer et ses collaborateurs (1979) sou lignent que la pauvreté, plus ou moins relative, de la poursuite visuelle non saccadique des nouveaux-nés serait la conséquence d'une immaturité de la fovéa, étant donné que les mouvements de l'oeil sont contrôlés par.
(22) 11. le système nerveux, et qu'en bas-âge ce dernier n'est pas encore achevé. Dans le même sens les muscles extraoculaires sont encore en développement ce qui engendre des mouvements de poursuite moins précis (Haywood, 1977). Cela vient confirmer en grande partie les résultats de Dayton et Jones (1964) qui estimaient que jusqu'à deux mois, lorsqu'il y a poursuite vi suelle, elle est presque exclusivement saccadique.. Si la poursuite vi. suelle retrouvée chez le bébé dès la naissance présente un caractère saccadique constitué d'ancrage du regard et de rotations successives de la tête, cela nous assure d'une présence d'un couplage oeil-tête très précoce. On peut supposer, comme l'affirme Bronson (1974), la présence chez le bébé de deux mécanismes visuels différents.. Le premier qui ne néces. site pas la maturité de la fovéa, c'est d'ailleurs l'aspect saccadique que l'on retrouve chez le nouveau-né et le nourrisson de moins de trois mois, étant donné que la stimulation de la rétine périphérique serait suffisante pour déclencher ce comportement.. Le deuxième mécanisme impli. querait beaucoup plus de mise en jeu de la rétine fovéale.. Il devient. fonctionnel vers 2-3 mois et s'explique par la capacité que présente le bébé de suivre de façon non saccadique un mobile se déplaçant dans son champ visuel. Il est possible comme il a été mentionné dans la littérature (Jouen et Bloch, 1981) de distinguer deux systèmes visuels:. (1) un système. visuel néo-cortical responsable du codage des patrons visuels complexe, et (2) un système plus ancien phylogénitiquement, qui intervient dans la localisation des stimuli.. Ce système visuel traiterait essentiellement. les informations issues de la périphérie de la rétine, dans le but de les localiser. La poursuite visuelle suit un développement progressif et devient intimement liée aux mouvements de la main.. On s'aperçoit qu'à l'âge de. 8-9 ans les enfants sont capables de porter des jugements précis sur la vitesse et sur la direction des objets en mouvement et sont rarement en retard dans leur poursuite des objets, mais cette habileté s'améliore à nouveau vers l'adolescence (Williams, 1973).. Kay (1957) souligne qu'avec.
(23) 12. l'expérience le sujet devient précis dans sa prédiction quant à la trajectoire de la balle à partir des informations reçues dès le début de son envol.. 11 serait même amené à ne pas fixer un ballon durant toute. sa trajectoire par exemple. Le contrôle visuel pourrait s'effectuer de deux façons:. - un. contrôle intermittent, où l'information visuelle serait d'abord prélevée avant le départ du mouvement, puis - un contrôle effectué sous la forme de brefs «échantillonnages» en cours de trajectoire (Jeannerod, 1981). Ces échantillonnages pourraient donner des indications sur la position respective de la main et du but à atteindre pour assurer la précision du mouvement.. L'atout que représente ce mode de contrôle est de décharger. le système du traitement de l'erreur d'une masse d'informations inutiles.. L'élaboration de la réponse manuelle:. la mesure du temps. Généralement le comportement d'interception implique un problème perceptuel ou un problème du processus informationnel aussi bien qu'un problème moteur.. La solution de chacun de ces problèmes dans des tâches. d'anticipation-coïncidence a une répercussion similaire en terme de précision. Une fois que le stimulus est perçu, identifié et localisé par le système oculo-céphalique, l'élaboration d'un programme d'action est nécesssaire pour déterminer la trajectoire adéquate de la main qui l'amène sur la cible ou à proximité.. Cela nous amène directement à. parler du temps de réponse motrice qui englobe le temps de réaction et le temps de mouvement. On ne peut pas ignorer que dans plusieurs activités physiques, la difficulté dans la précision d'interception d'un objet en mouvement est due aux caractéristiques temporelles du stimulus, étant donné que le plus souvent les objets en mouvement se déplacent à des vitesses rapides. Confronté à cette réalité, le sujet ne dispose que d'une très courte période pour recevoir l'information sensorielle, l'analyser, la traiter,.
(24) 13. planifier et exécuter une réponse appropriée (Fitts et Posner, 1967). Ghez (1982) a rapporté que dans les mouvements volontaires le système pyramidal et les neurones rubrospinaux commencent à déchargêr 20 à 50 msec avant qu'aucun signe de contraction musculaire ne soit exhibée. Mais il y a d'autres groupes de neurones qui déchargent plus tôt.. Deecke. et ses collaborateurs (1969) ont trouvé que les changements du potentiel évoqué au niveau du cortex moteur commencent à peu près 800 msec avant le mouvement volontaire du doigt, prouvant ansi que l'activité au niveau du système nerveux commence longtemps avant que le mouvement ne soit dé clenché.. Pendant cette période le système nerveux central est censé éta. blir un programme spécifiant, comment les neurones vont répondre au stimu lus.. Ce même processus fut analysé à partir d'un modèle du traitement. de l'information proposé par Théios (1973, 1975) et comporte cinq stades: (1). de processus sensoriels:. codage de l'information dans les organes. récepteurs et afférence centrale; (2). d'identification:. reconnaissance du stimulus, attribution d'un nom. ou d'une catégorie; (3). de détermination de la réponse:. recherche en mémoire de la réponse. qui doit être associée au signal identifié au stade précédent; (4). de programmation de la réponse:. recherche en mémoire du code. moteur approprié pour exécuter la réponse; (5). de processus moteur:. efférence vers les effecteurs et exécution. proprement dite de la réponse. Ce même schéma et tous ces mécanismes ont été repris et explicités chez Bard (1982) et apparaissent de façon détaillée dans les travaux de Paillard et Beaubaton (1978). Le temps qui s'écoule entre l'apparition du stimulus et le début du mouvement (TR) constitue une des composantes de la réponse motrice (Woodworth, 1899) sur laquelle viendra se greffer le temps de mouvement.
(25) 14. (TM), qui représente Tinterval le temporel entre l'initiation du mouvement et la fin de la réponse. Plusieurs facteurs peuvent influencer le TR, parmi lesquels on peut citer les facteurs se rapportant à la nature du stimulus, i.e., sa moda lité, son intensité; ou à la nature de l'individu lui-même, i.e., son état affectif, son âge, son sexe.. Le TR en fonction de la complexité de la tâche Le TR simple est estimé à .16 et .20 sec pour les sujets adultes. Il peut même des fois aller jusqu'à .50 sec en fonction de la complexité de la tâche.. Il faut noter que lorsque la sollicitation au niveau. cortical augmente, e.g., pour une tâche complexe, le TR augmente aussi. Cette augmentation temporelle réflète la plupart du temps une augmenta tion dans le temps alloué au traitement de l'information au niveau du système nerveux central plutôt qu'au niveau du système nerveux périphé rique et musculaire.. L'augmentation qu'accuse le TR dans les tâches com. plexes est due à une augmentation de la période du processus de traitement de l'information (Craik, 1948).. La période de réception du stimulus et. de sa transmission au système nerveux central est relativement constante dans les tâches simples et les tâches complexes soit 50 msec.. L'étude. de Norrie (1967) vient appuyer celle de Mendryk (1960) et met en évidence le fait que le degré de simplification possible est intimement lié à la nature de la tâche.. Le TR en fonction de l'âge On s'est vite douté que l'amélioration du TR est le fruit de l'évo lution génétique de l'individu, de sa maturation et de son expérience. L'amélioration de TR avec l'âge est supportée par le résultat de plusieurs études.. Gibson et al. (1969) soulignent une amélioration de 10% dans le. TR et le temps de réflexe.. Ce qui ressort aussi de l'étude de Henry et. Rogers (1960) sur des sujets de 8, 12 et 24 ans. Seulement ces résultats.
(26) 15. ont été interprétés cotrene étant la conséquence directe de l'expérience et de la pratique.. L'apprentissage en quelque sorte permet de réduire. le temps alloué à la prise de décision, et par voie de conséquence, il améliore le TR.. Cette amélioration a beaucoup plus tendance à être le. résultat d'une maturation au niveau du système nerveux central indépen dante du facteur expérience.. Mendryk (1960) rapporte que les jeunes hom. mes de 22 ans ont un TR plus rapide que ceux de 12 ou de 48 ans.. Pour. Hodgkins (1963) le TR s'améliore jusqu'à l'âge adulte et après il décroît. Cette détérioration pourrait s'expliquer par une détérioration des fonc tions physiologiques et par un phénomène d'interférence dont la nature consiste en une division de l'attention.. Le temps de mouvement Quant au temps de mouvement (TM) ou vitesse de réalisation de la réponse, elle est liée davantage à l'apprentissage que le TR et elle dé pend également de la complexité de la tâche et des capacités du sujet (Blair, 1970; Clarke, 1971; Fitts et Posner, 1967; Wilson, 1959). Hodgkins (1963), utilisa des sujets des deux sexes âgés de 6 à 44 ans. Les hommes se sont révélés plus rapides que les femmes en TR et en TM. Le temps de mouvement comme le temps de réaction s'améliore avec l'âge et atteint son maximum vers 19 ans pour décroître par la suite.. On peut. remarquer aussi que la vitesse de mouvement maximale est maintenue plus longtemps chez les hommes que chez les femmes. Les facteurs les plus déterminants du TM sont:. l'amplitude de la. réponse, la précision et la difficulté, sans exclure les conditions du feedback (vision ou non vision du membre actif).. La précision et le rôle du feedback visuel dans une tâche d'anticipation-coïncidence L'importance que prend la vision dans la connaissance du milieu environnant quant à la localisation et l'identification des objets qui.
(27) 16. nous entourent, et éventuellement dans la structuration et l'orientation du guidage de la réponse motrice est indiscutable.. Pour focaliser. davantage cette évidence Lee et al. (1977), ont analysé sur films la pertinence de la vision dans la régulation et le contrôle du saut en longueur.. Ils concluent que les athlètes apportent des ajustements. visuels dans leurs dernières foulées pour faire coïncider le pied d'appel avec la planche.. On ne peut pas non plus ignorer la difficulté. et la problématique qui peut découler du fait de monter et surtout de descendre les escaliers les yeux bandés!. Mais par contre on serait. moins prêt à admettre que la simple privation de la vision du bras lanceur au javelot et au disque affecte la performance d'une façon significative, et pourtant des études comme celle de Graybiel et al. (1955), viennent appuyer ce point de vue.. Cela nous amène à dire avec. Smyth et Marriott (1982) que les informations visuelles sur la position de la main ou plutôt du membre impliqué directement dans la tâche sont importantes.. Le système proprioceptif serait en quelque sorte calibré. par la vision. L'habileté dans une tâche de coordination visuo-manuelle, comme l'extension de la main en vue d'attraper ou de toucher une cible à distance (Legge, 1970) dépend en grande partie d'une perception exacte et précise de la localisation et de la cible et de la main. travaux ont montré l'importance majeure de l'habileté de:. Si plusieurs «regarde ce. que tu es en train de faire!» en tout début d'apprentissage (Fitts, 1951; Fleishman et Rich, 1963; Mackintosh, 1965), ces travaux n'appor tent néanmoins que des conclusions non spécifiques et assez ambiguës. Des questions demeurent: Doit-il regarder sa main?. Est-ce que l'apprenant doit regarder la cible? Et s'il regardait les deux?!. Utilisant une tâche où le sujet doit pousser un chariot sur un plan incliné vers une cible, avec la possibilité de voir ou bien sa main et par conséquent le chariot ou bien la cible, Whiting et Cockerill (1974) trouvent que tous les sujets sont plus précis dans la condition expéri mentale où ils voient la cible que dans celle où ils ne la voient pas. Ils rapportent aussi que la performance des jeunes dans la condition: oeil sur la cible est moins précise que celle d'adultes dans la condition.
(28) 17. oeil sur la main.. En sport, on remarque que lors d'actions balistiques. le sujet axe beaucoup plus son attention sur la cible. Pour l'atteinte d'objectifs précis dans un espace proche du corps, il semble exister une carte du corps centrée et une certaine topologie de l'espace visuel (Marteniuk et Rc>y, 1983).. Ce système se développe à. travers des expériences visuelles et proprioceptives dans l'atteinte des objets, et une fois développé il sert de code spatial non seulement pour les objets, mais aussi pour le membre impliqué directement dans le mou vement. Un certain nombre d'observations, notamment sur les singes déafférentés (Taub et al., 1975) ont montré l'importance du repérage de la position initiale du membre dans les activités d'ajustement.. Il s'est avéré qu'une. amélioration relative de la précision des pointages est enregistrée dans les conditions où le sujet dispose d'informations visuelles sur le début ou la partie intermédiaire du geste. Orliaguet (1983) quant à lui, compare l'efficacité de la vision et de la proprioception dans les tâches de reproduction de positions effec tuées par les enfants de 5, 6, 8 et 10 ans.. Les résultats de cette étude. montrent que la vision et la proprioception sont capables de traiter avec une efficacité équivalente les informations spatiales relatives à l'orien tation générale des segments de bras.. Par contre la précision des repro. ductions varie en fonction de la modalité sensorielle.. Chez les enfants. de 5 ans, les performances sont meilleures dans la modalité proprioceptive. Ensuite, avec l'âge, c'est dans la modalité visuelle que les reproductions de positions sont les plus précises.. Ces résultats semblent indiquer. qu'à partir du moment où l'enfant maîtrise certaines relations spatiales, la vision devient la modalité sensorielle la mieux adaptée à un traitement précis des rapports spatiaux définissant chaque configuration corporelle. Si chez l'adulte de nombreuses recherches (Marteniuk, 1976; Posner, 1967) ont pu montrer une plus grande efficacité de la vision sur la pro prioception; peu de recherches ont été effectuées chez l'enfant.. Certaines. d'entre elles, qu'il s'agisse d'activités de prises de positions corporelles (Wallon et Lurcat, 1962) ou de localisations de cibles (Zazzo, 1975) semblent.
(29) 18. montrer que les perceptions centrées sur «l'espace corporel» s'organisent plus précocement que celles centrées sur «l'espace environnant».. Par. ailleurs, la localisation d'objets s'effectue dans le cadre d'un «référen tiel égocentré» (Lepecq, 1982).. Si la propriception semble fournir aux. jeunes des informations plus facilement utilisables, la vision deviendrait au cours du développement la modalité sensorielle la plus efficace (Samuel, 1981).. Enfin les travaux de Hay (1979a,b) indiquent que, lors du pointage. manuel d'une cible, la vision n'exercerait pas un rôle dominant chez les jeunes enfants.. L'importance des coordinations visuo-motrices chez l'homme, comme élément de base dans la construction de l'espace, n'est plus à démontrer. De ce fait, le comportement aussi simple que de déplacer une main dans l'espace visuel en direction d'un objet à saisir soulève un grand nombre de problèmes sur le plan de son histoire ontogénétique et des mécanismes impliqués (Hay, 1977).. On peut cependant distinguer deux composantes. dans le déplacement du membre:. -une composante balistique programmée. d'avance, et -une composante de guidage, où les ajustements et les correc tions sont possibles par le biais des informations reçues du mouvement lui-même et de l'objectif à atteindre.. Des études beaucoup plus. approfondies axées sur l'analyse des correc. tions de trajectoire de la main en mouvement vers une cible visuelle, ont été entreprises par Hay (1977, 1978, 1979b) sur une population d'enfants et d'adultes dont la vision est déviée au moyen de prismes.. Les résultats. de ces recherches mettent en relief dans un cadre ontogénitique un tracé évolutif de la réponse motrice en fonction de l'âge.. On constate qu'à 5. ans le contrôle visuel n'intervient qu'au moment de l'arrêt du mouvement sur la cible.. Alors qu'il intervient prématurément à 7 ans pour revenir. à un niveau intermédiaire à 9 ans et 11 ans. et précision devient optimal vers 9 ans.. Le rapport entre vitesse. Par ailleurs la capacité d'inté. grer l'information visuelle en cours cj'action se développe vers 7 ans, mais une instabilité générale est toujours manifeste.. Cette instabilité. peut être interprétée en terme de conflit entre les différentes composantes du mouvement qui se traduit par une courbe de mouvement hésitante (Hay, 1979a, b)..
(30) 19. Pour établir la distinction entre le déclenchement du mouvement d'at teinte, son guidage et son orientation, plusieurs études ont été investiguées dans le domaine des jeunes bébés et celui des animaux.. Hein, Gower,. Diamond (1970), Hein, Held et Gower (1970) avaient d'ailleurs établi la distinction entre ces deux composantes dans la réaction du positionnement de la patte du chaton.. Ils ont noté T o r d r e et le temps de leur apparition,. ainsi que les informations et les expériences nécesssaires pour leur déve loppement respectif.. On peut retrouver le même tracé dans des études. faites sur les bébés, pour ne citer que Bower, Broughton, et Moore (1970), Bruner et Koslowski (1972).. Ces derniers ont tenté de différencier les. réactions réflexes des mouvements dirigés et volontaires.. Quant à Bower. et Wishart (1972), ils ont recensé et identifié des mouvements balistiques d'atteinte à l'âge de 20 semaines, alors que McDonnell (1975) a mis en évidence l'apparition des mouvements visuellement guidés entre l'âge de 4 et 10 ans.. Reste â savoir maintenant, dans quelle mesure un feedback. visuel peut être efficace et pour quelle durée il peut entrer en jeu dans la précision terminale? Dans une tâche de traçage de ligne, i.e., un aller-retour sur un papier se déplaçant à une vitesse de 2.5 cm/sec, et sur un espace déli mité par deux lignes droites parallèles espacées de 4 cm, Stubbs (1976) constate que pour les temps de mouvement ne dépassant pas le seuil de 500 msec, la déviation ne varie pas de façon significative avec les yeux fermés ou les yeux ouverts.. Alors que cette différence devient signifi. cative quand le TM est au-delà de 500 msec.. Ces résulats corroborent. ceux de Woodworth (1899) qui, d'ailleurs avait utilisé la même tâche. Les mouvements dépassant les 500 msec accusent une bonne précision termi nale.. Ce fait est intimement lié au feedback visuel et Woodworth conclut. que même si le feedback existe (vision du membre actif), il ne commence à être opérationnel qu'à partir de 500 msec. Klapp (1975) s'attaqua à la distance du mouvement et non au temps requis pour l'exécuter.. Les sujets devaient effectuer des mouvements de. pointage à partir d'un point de départ, pour entrer en contact avec une cible circulaire localisée à des distances variées soit: courte et 336 mm = distance longue.. 2 mm = distance. Il a constaté que sans feedback. le pourcentage d'erreur est significativement plus important pour le.
(31) 20. mouvements longs que pour les mouvements courts, respectivement 88.6% et 8.4%.. Klapp (1975) suggère que les mouvements longs sont guidés par le. feedback visuel alors que les mouvements courts ne le sont pas, et qu'ils sont programmés avant qu'ils ne soient initiés.. Dans un deuxième temps,. le même auteur, Klapp (1978) reprenait les résultats de son étude précé dente pour mettre beaucoup plus l'accent sur le TM que sur la distance du mouvement.. Klapp se pose la question à savoir jusqu'à quel point les. mouvements de pointage peuvent être programmés.. Finalement elle déduit. que dans les mouvements courts le sujet dispose de peu de temps pour uti liser le feedback visuel, contrairement aux mouvements longs où sa pré sence est efficace et même nécesssaire.. Ce raisonnement a également été. soutenu par Schmidt et Russel (1972), ainsi que par Christina et al. (1982). Il ressort de tous ces écrits que la mise en jeu du feedback visuel dépend de la durée du mouvement au cours duquel le sujet peut apporter des correc tions et des ajustements pour améliorer la précision terminale.. Beggs. et Howarth (1971), Keele et Posner (1968) estiment la mise en jeu du pro cessus du feedback visuel entre 190 et 290 msec.. Smith et Bowen ,(1980),. Cari ton (1981) et Zelaznik (1983) quant à eux concluent que le temps néces saire pour que le feedback devienne opérationnel est de 190 msec. Dans le cadre de référence, la présente étude tentera de répondre à la question suivante:. dans la tâche d'anticipation-coïncidence, l'assis. tance visuelle du mouvement favorise-t-elle la précision spatiale? Notre échantillonnage vise à cerner les éventuelles différences rele vées quant à l'âge pour les paramètres impliqués dans une pareille tâche. On comparera aussi la précision terminale des sujets de 6, 9, 11 ans et d'adultes suivant la manipulation de conditions de feedback visuel, i.e., ». avec ou sans vision du mouvement du bras actif.. Nous tiendrons également. compte du rôle possiblement calibrateur de la tête en établissant des conditions variées d'exécution: stimulus.. tête libre, fixée et forcée à suivre le.
(32) 21. Les hypothèses (1). La capacité d'anticipation-coïncidence se développe avec l'âge, les enfants plus âgés étant plus précis temporellement et spatialement que les plus jeunes, et cependant moins précis que les adultes;. (2). La vision du bras qui effectue le mouvement dans une tâche d'anticipation-coïncidence améliore la précision spatiale, mais elle ne modifie pas la précision temporelle;. (3). La stabilité céphalique facilite la précision spatiale et temporelle dans une tâche d'anticipation-coïncidence;. (4). La poursuite par l'oeil du stimulus visuel facilite l'estimation de la vitesse du stimulus.. Pour étudier ces différentes hypothèses trois expériences ont été réalisées.. Cette étude se limite toutefois aux enfants de 6, 9 et 11. ans et à un groupe d'adultes dont la moyenne d'âge est de 23.7 ans. plus, la variable sexe n'a pas été prise en considération.. De.
(33) EXPERIENCE I. METHODOLOGIE. La première expérience avait pour but d'étudier le développement de l'habileté d'anticipation-coïncidence chez des enfants de 6, 9 et 11 ans et chez des adultes. Les sujets Quatre groupes de 10 sujets ont participé à cette étude:. 3 groupes. d'enfants (5 filles et 5 garçons par groupe, âgés respectivement de 6, 9 et 11 ans avec une moyenne d'âge de 6.2, 9.7 et 11.7) et un groupe d'adul tes (4 ferrenes et 6 hommes).. La moyenne d'âge était de 22 ans pour les. femmes et de 24.8 ans pour les. hommes.. Les sujets ont été choisi d'une façon aléatoire parmi une population de droitiers fréquentant les écoles élémentaires de la commission scolaire de Ste-Foy pour les enfants; quant aux adultes ils étaient tous des étu diants sous-gradués et gradués de l'Université Laval, tous des volontaires, et tous des droitiers. La tâche et l'appareillage Les sujets étaient assis sur une banquette ajustable, assez confor table pour éviter toute fatigue prématurée pouvant influencer directement l'exécution de la tâche (surtout la précision terminale)..
(34) 23. Ils étaient installés de sorte que le support, sur lequel le mouvement apparent était présenté, soit sur le même plan horizontal que leurs yeux. Le support de 440 cm de longueur était situé à deux mètres du sujet et à 125 cm du so l .. Le mouvement apparent était créé à partir d'une série de 89 photo diodes à allumage successif, espacées de 5 cm.. L'intervalle temporel,. i.e., l'intervalle entre l'extinction et l'allumage de deux photodiodes était égal à zéro.. La provenance de la lumière était aléatoire, i.e.,. que le mouvement apparent pouvait aller de gauche à droite (= D^) ou de droite à qauche (= D 2 )-. Deux vitesses du stimulus ont été choisies,. vitesse lente (V^) = 4 km/h, et vitesse rapide ( ). = 8 km/h, soit res. pectivement; 178.8 et 357.6 cm/sec, pour se terminer au centre du support (fig. 1). A l'aide d'un levier de contrôle les sujets devaient effectuer une extension horizontale du bras dans un plan sagital avec une amplitude du mouvement de 30 cm pour terminer leur mouvement en coïncidence avec l'ar rivée du stimulus au centre du support (fig. 1).. Le levier de contrôle. était monté sur un double joint universel et deux potentiomètres étaient fixés à sa base et connectés à des amplificateurs, et à un Micro Nova Data General MP100. La vitesse du mouvement apparent et sa direction, étaient contrôlées par l'ordinateur.. Toutes les mesures dépendantes, erreurs temporelles. et spatiales étaient enregistrées par l'ordinateur et gardées en mémoire (fig. 2 ).. La procédure expérimentale Les sujets après une familiarisation avec la tâche d'une vingtaine d'essais, devaient réaliser vingt essais (2 directions x 2 vitessses x cinq essais) présentés aléatoirement..
(35) 24.
(36) 25. Figure 2:. Le système de contrôle et d'enregistrement.
(37) 26. Dans cette première expérience aucune contrainte physique n'était appliquée aux sujets qui étaient parfaitement libres de procéder comme ils l'entendaient (mouvements de tête, utilisation de feedback, mouvements oculaires).. Les variables Cette étude comprenait trois variables indépendantes:. l'âge des. sujets, la vitesse du mouvement apparent, et la direction. Six variables dépendantes ont été retenues soit: L'erreur temporelle absolue en msec (ETA), qui est l'écart temporel en millisecondes entre l'arrivée du stimulus visuel et la fin de la réponse motrice du sujet, en valeur absolue.. Elle représente la. déviation moyenne absolue, sans tenir compte de la direction, elle mesure donc la précision générale du sujet dans la performance. L'erreur temporelle constante en msec (ETC), qui est l'écart temporel, en millisecondes, entre l'arrivée du stimulus visuel et la fin de la réponse motrice du sujet.. Elle mesure la tendance. moyenne des erreurs quant à leur direction par rapport à l'arrivée du stimulus:. en avance ou en retard.. L'erreur spatiale absolue (ESA) en millimètres qui correspond à l'écart entre la localisation spatiale de l'arrivée du stimulus et la localisation spatiale de la fin du mouvement du bras. L'erreur spatiale constante (ESC) en millimètres, qui est la même que l'erreur absolue, avec l'attribution du signe négatif pour tout mouvement se terminant à gauche de la localisation spatiale de l'arrivée du stimulus et d'un signe positif pour tout mouvement se terminant à droite..
(38) 27. Le temps de réaction (TR) en millisecondes qui correspond à la durée s'écoulant entre le départ du stimulus visuel et 1 'initiation de la réponse du sujet. Le temps de mouvement (TM) en millisecondes qui correspond à la durée s'écoulant entre l'initiation et la terminaison du mouvement du bras.. Le traitement statistique Des analyses de variance à 3 dimensions (4 âges x 2 directions x 2 vitesses) avec mesures répétées sur les deux derniers facteurs ont été effectuées sur chacune des mesures dépendantes.. Pour chaque analyse réa. lisée sur l'âge, lorsque des différences significatives apparurent, le test de comparaisons multiples de Duncan fut appliqué aux moyennes. programme informatique utilisé fut le SAS.. Le. Pour toutes les analyses un. niveau de signification de .05 a été retenu.. Les résultats Les résultats obtenus après l'analyse des données sont présentés en trois sections:. la précision temporelle, la précision spatiale et le. temps de mouvement.. La précision temporelle L'erreur temporelle absolue D'après le tableau 1 on constate pour T e r r e u r temporelle absolue un effet significatif de l'âge:. F(3,36) = 3.59, p = .022.. Seuls les. enfants de 6 ans sont significativement moins précis que les autres groupes (fig. 3 et tableau 2)..
(39) TABLEAU 1 Analyse de variance pour l'erreur temporelle absolue. Source de variation. Age Di rection Age-direction Vitesse Age-vitesse Direction-vitesse Age-direction-vitesse. * P < .05 *** P < .001. SC. DL. 30583.07500000. 3. 476.10000000. 1. 476.10000000. 2440.40000000. 3. 813.46667. 11971.60000000. 1. 11971.60000000. 2587.60000000. 3. 862.56667. 0.87. 893.02500000. 1. 893.02500000. 1.03. 3267.07500000. 3. MC. 10194.358. 1089.0233. 3.59 0.82 1.40 *** 12.10. 1.26. PO CO.
(40) Erreur. temporelle. absolue. ( ETA. ) en. msec.. 29. 6 ans. F i g u r e 3:. 9 ans. Erreur. temporelle. II ans. a b s o l u e en f o n c t i o n. Adultes. de l'âge..
(41) 30. Tableau 2 Moyenne pour l'erreur temporelle absolue en fonction de l'âge. Age. Moyenne (X). 6 ans. 106.27. 9 ans. 81.57. 11 ans. 74.82. adultes. 70.57. Test de Duncan p < .05 6 ans. 9 ans. 11 ans. adultes. 106.27. 81.57. 74.82. 70.57.
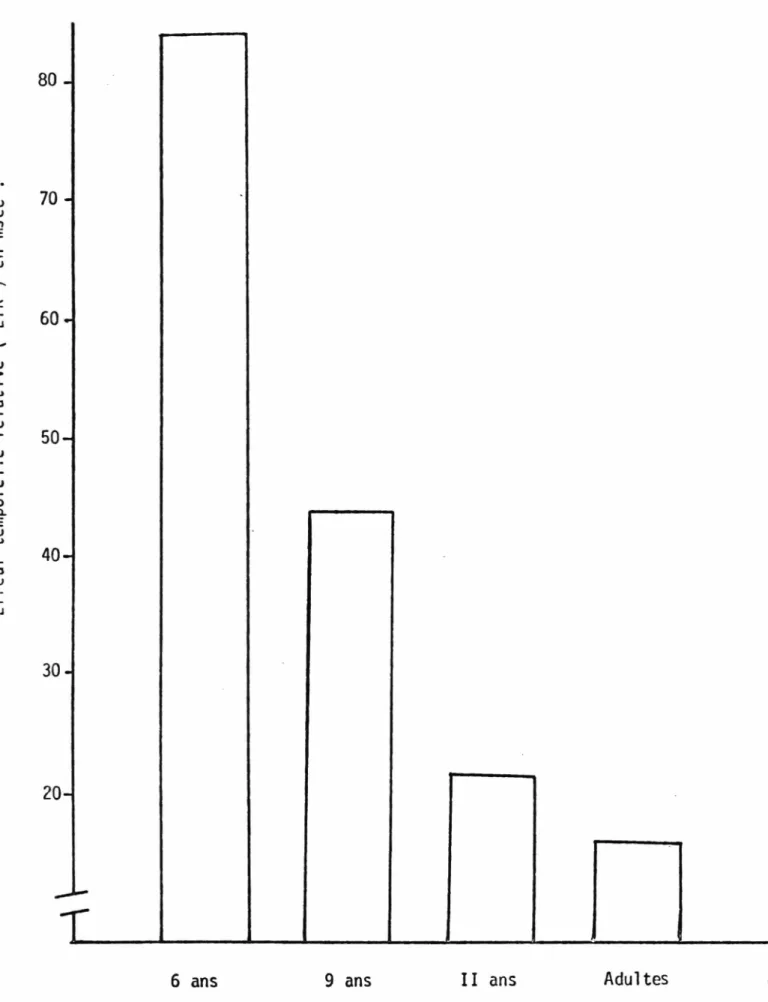
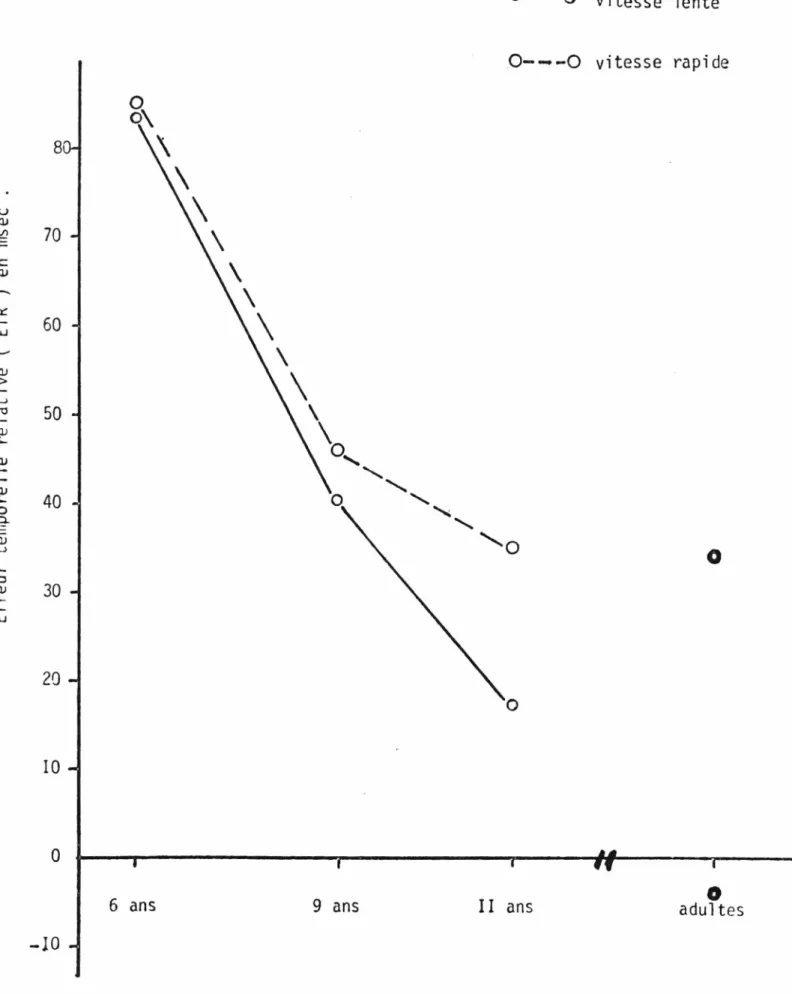
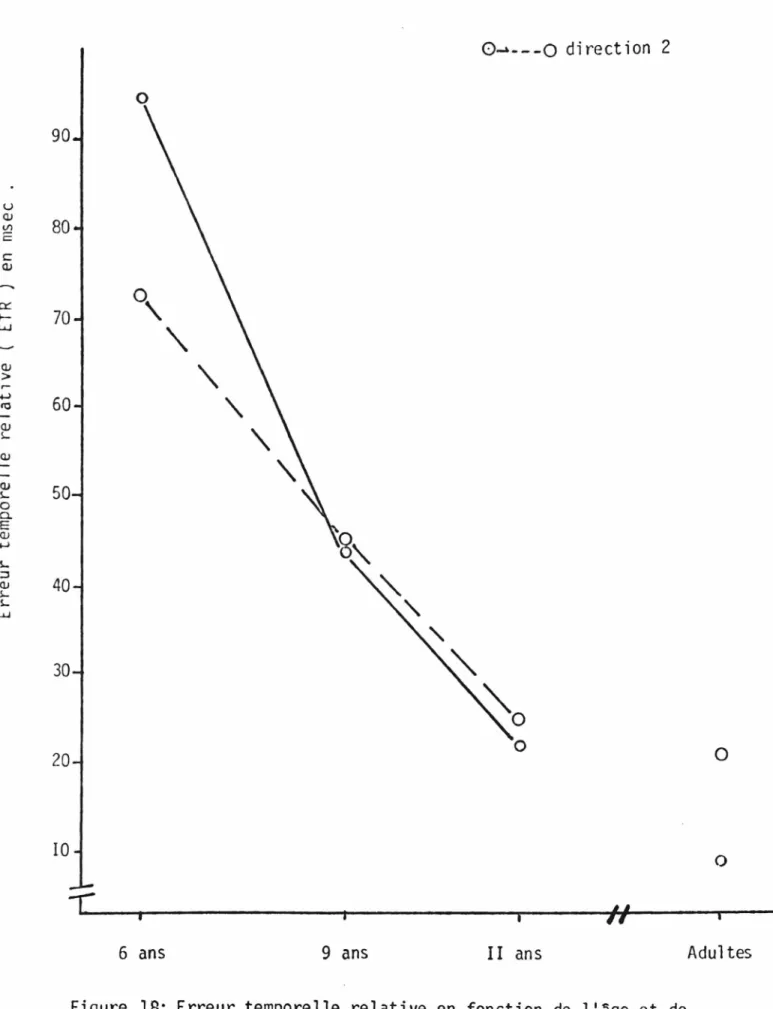
(42) 31. La vitesse modifie significativement la précision temporelle F(l,36) = 12.10, p = .001; M y -j = 91.96. et M yr = 74.66.. Tous les sujets sont. plus précis en vitesse rapide qu'en vitesse lente (fig.4). L'erreur temporelle relative Quant à l'erreur temporelle relative il y a un effet significatif de la vitesse:. F(l,36) = 6.31, p = .01 les moyennes étant respectivement. M yr = 30.91 et. = 8.41 (tableau 3 et fig. 5).. Cela révèle contraire. ment à l'ETA que les sujets sont systématiquement en retard en vitesse rapide, alors que T e r r e u r relative se distribue plus normalement à vi tesse lente.. La précision spatiale L'erreur spatiale absolue Pour T e r r e u r spatiale absolue, on remarque un effet significatif de l'âge:. F(3,36) = 2.83, p =. ans étant moins précis que les. .05 (tableau 4).. Les enfants de 6 et. 11 ans et les adultes (tableau 5 et fig.. 6 ). L'erreur spatiale relative Pour T e r r e u r spatiale relative (tableau 6) on constate qu'il y a effet significatif: .de l'âge:. (tableaux 6, 7 et fig.. .de la direction:. (tableau 6 et fig. 8). .de la vitesse:. (tableau 6 et fig. 9). 7). .On constate aussi une interaction âge - vitesse (tableau 6 et fig. 10), ainsi qu'une interaction direction - vitesse.. 9.
(43) Erreur. ro. o. temporelle. o. absolue. ( ETA. cri O. ) en nis e c .. co o. o. j£-. _L_ Figure4:. ooooooooooooooooooooooooooooooooo ooooooooooooooooooooooooooooooooo ooooooooooooooooooooooooooooooooo. .. temporelle. vitesses. Erreur. des. o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o. co ro. absolue en. e. fonction et n> tr </> rD. o o o o o o. ro ir oo a>. rD 00 00 05. a» “ O. rD Z3.
(44) TABLEAU 3 Analyse de variance pour T e r r e u r temporelle relative. Source de variation. SC. DL. 15166.42500000. 3. 469.22500000. 1. 6122.02500000. 3. Vitesse. 20250.00000000. 1. Age-vitesse. 21511.75000000. 3. 547.60000000. 1. 17620.95000000. 3. Age Di rection Age-direction. Direction-vitesse Age-di rection-vi tesse. ** p < .01. MC. 5055.475 469.22500000 2040.675 20250.00000000 7170.5833 547.60000000 5873.65. 0.68 0.18 0.78 GJ. U>. .6.31 2.24 0.38 4.05. *★.
(45) Erreur. temporelle. relative. (ETR). en. m sec.. 34. Figure. 5:. Erreur. temporelle. relative. en. fonction. des. vitesses..
(46) TABLEAU 4 Analyse de variance pour l'erreur spatiale absolue. Source de variation. Age Di recti on Age-direction Vitesse Age-vitesse Di rection-vitesse Age-di rection-vitesse. *. P < .05. SC. DL. MC. 701.96875000. 3. 39.00625000. 1. 39.00625000. 1.11. 149.11875000. 3. 49.70625. 1.42. 9.55625000. 1. 8.55625000. 26.56875000. 3. 8.85625. 0.64. 5.25625000. 1. 5.25625000. 0.48. 80.16875000. 3. 233.98958. 26.722917. 2.83*. 0.61. •. 2.46. OO. en.
(47) 36. Tableau 5 Moyenne pour T e r r e u r spatiale absolue en fonction de l'âge. Age. Moyenne (X). 6 ans. 13.70. 9 ans. 14.60. 11 ans. 10.12. adultes. 9.90. Test de Duncan p < .05 9 ans. 6 ans. 11 ans. 14.60. 13.70. 10.12. adultes 9.90.
(48) Erreur. spat i a l e. absolue. ( ESA. ) en. mm.. 37. F i g u r e 6:. Erreur spatiale. absolue. en f o n c t i o n. de l ' â g e. ..
Figure
+7
Documents relatifs
Et s’il eût seulement nombré jusqu’à trente ou quarante retours de l’une tirée vingt degrés ou moins, et de l’autre quatre-vingts ou nonante degrés, il est connu que la
la fontion f est fournie omme une boîte noire à la routine d'intégration numérique alors le résultat fourni pour F sera moins préis et demandera plus de temps de alul que via le
Dans le cas où le nombre de mesures est très grand, et que l’on s’approche d’une distribution normale, les valeurs extrêmes ne constituent plus une bonne approximation
véritablement l’erreur commise lors d’un calcul éléments finis et ceci pour un grand nombre d’applications.... Où
Mais on remarque que la moyenne arithmétique des réels choisis par Puce (159/47 = 3,383) est inférieure à leur moyenne harmonique (47/13 = 3,615), ce qui est
Elle permet de calculer l'échelle de la photographie (théorie)(exemple 1)(exemple 2) en question, le diamètre d'un cratère ou d'une mer de la Lune (théorie)(exemple), la hauteur
Dr CHANELIERE, Dr RICHET, Dr FIGON Séminaire FPC – LYON - 15 et 16 septembre 2011. « Erreur médicale : quels enseignements
se font écraser dans le camion.Ils s'arrêtent plus de 400 fois par mois pour les enlever du tapis, car si il reste le virus d' une maladie et qu' un trieur se pique malgré leurs
