UNIVERSITE DE
SHERBROOKE
F aculté de génie G énie m écaniqueS
i m u l a t i o n e t o p t i m i s a t i o n p a r a m é t r i q u eDE LA CH A ÎN E D E M O T O R ISA T IO N D ’UN
V É H IC U L E É L E C T R IQ U E
M ém oire d e m a îtris e es sciences a p p liq u ées S p écialité: génie m é can iq u e
Ju ry : P h ilip p e M ich eau P a tr ic e M asso n
J e a n - P h ilip p e D esb iens
Frédéric ROLLAND
1+1
Published Héritage Branch Direction du Patrimoine de l'édition 395 Wellington Street Ottawa ON K 1A0N 4 Canada 395, rue Wellington Ottawa ON K1A 0N4 CanadaYour file Votre référence ISBN: 978-0-494-96241-1 Our file Notre référence ISBN: 978-0-494-96241-1
NOTICE:
The author has granted a non-
exclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by
télécomm unication or on the Internet, loan, distrbute and sell theses
worldwide, for commercial or non- commercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par télécomm unication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins com merciales ou autres, sur support microforme, papier, électronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protégé cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement
reproduits sans son autorisation.
In compliance with the Canadian Privacy A ct some supporting forms may have been removed from this thesis.
W hile these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conform ém ent à la loi canadienne sur la protection de la vie privée, quelques
form ulaires secondaires ont été enlevés de cette thèse.
Bien que ces form ulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
RESUME
La multiplication des véhicules électriques au détriment de ceux à moteur à combustion interne contribue grandement à la sauvegarde de notre milieu de vie. Une conception intelligente peut pallier certains de leurs défauts actuels comme l’autonomie.
Les travaux de cette maîtrise portent sur l’optimisation de la motorisation, de la chaîne de trans mission et de la batterie de tels véhicules. Dans un premier temps, plusieurs simulateurs de déplacement longitudinal de véhicules électriques ont été développés sous Simulink© en utilisant l’approche dynamique et quasi-statique. Ensuite, des scripts d ’explorations systématiques, co dés sous Matlab© permettent d’observer l’influence de plusieurs paramètres sur trois objectifs. Le premier est la mesure du temps d ’accélération, le second la vitesse maximale et le dernier l’autonomie.
Un cas particulier est également traité afin d’illustrer l’efficacité de ces outils lors de la conception de véhicules électriques.
M ots-clés : véhicule électrique, simulation, quasi-statique, dynamique, optimisation paramé trique, exploration systématique.
REMERCIEMENTS
Je tiens à rem ercier to u t particulièrem ent mon directeur de recherche qui a su to u t au long de ces deux années me rem ettre sur la bonne voie lorsque je bloquais ou m ’entêtais dans une impasse. Mes remerciem ents vont également au personnel et au groupe d ’étu d ian ts (m ulticulturels) en m aîtrise et au d octorat du centre de recherche où je travaillais p o u r leur accueil chaleureux. Je suis to u t particulièrem ent reconnaissant à Simon R ichard et Jean-P h ilip pe Desbiens qui m ’ont encadré l’un à la suite de l ’au tre ainsi que les deux chefs de p ro jet qui ont dû se relayer à la tê te de l’équipe, à savoir G ilbert Lefrançois et P atrick Quirion. De plus, je tiens à rem ercier Steeve L abbé pour ses multiples conseils sous M atlab© et LaTeX©.
Je tiens également à remercier le dernier correcteur de ce m ém oire qui n ’a pas été cité, P atrice Masson, pour cette lecture que j ’espère ne pas être tro p désagréable!
Je remercie m a famille, notam m ent mes parents, pour leur aide et leurs visites (régulières) au Québec.
TABLE DES MATIÈRES
1 In trod u ction 1 2 R evu e de la littéra tu re 3 2.1 Véhicule é l e c tr i q u e ... 3 2.1.1 B atteries ... 3 2.1.2 M oteurs et c o n trô le u r s ... 6 2.1.3 T ra n sm issio n s ... 8 2.1.4 Moyens de régénération d ’é n e r g i e ... 10 2.1.5 P n e u s ... 112.2 Sim ulation num érique ... 11
2.2.1 Cycle de c o n d u ite ... 11
2.2.2 Approche d y n a m iq u e ... 13
2.2.3 Approche q u a s i- s ta tiq u e ... 14
2.2.4 U tilisation de carte d ’efficacité ... 15
2.2.5 L o g i c i e l ... 16
3 D éfin ition d u problèm e e t m é th o d o lo g ie a d o p tée 19 3.1 Problém atique du p r o j e t ... 19 3.2 O b je c tifs ... 20 3.3 M é th o d o lo g ie ... 20 3.4 Moyen m a t é r i e l ... 21 4 M od élisation d u véhicu le 23 4.1 Limites de s im u la tio n ... 23
4.1.1 O bjectifs de sim u la tio n ... 23
4.1.2 Modèle longitudinal ... 24
4.2 D ynam ique longitudinale du v é h ic u le ... 24
4.2.1 R éfére n tiel... 24
4.2.2 Loi de N e w t o n ... 24
4.2.3 La force de résistance au ro u le m e n t... 25
4.2.4 La force de résistance a é ro d y n a m iq u e ... 25
4.2.5 L a force g ra v ita tio n n e lle ... 26
4.2.6 Bilan des f o r c e s ... 26
4.3 La force de tr a c tio n ... 27
4.3.1 Lois de C o u lo m b ... 27
4.3.2 Le g lis s e m e n t... 28
4.3.3 Coefficient de frottem ent d y n a m i q u e ... 30
4.3.4 Modèle en régime p e r m a n e n t ... 31
4.3.5 Modèle en régime tran sito ire ... 32
4.3.6 E quation différentielle de la roue ... 34
4.5 La tr a n s m is s io n ... 35 4.5.1 E quations de b a s e s ... 35 4.5.2 Efficacité ... 36 4.6 Le m oteur et c o n t r ô l e u r ... 36 4.7 La b atterie ... 37 4.8 C onclusion... 38 5 S im u la te u r s 3 9 5.1 G énéralités ... 39 5.1.1 D escription des m o d è l e s ... 39
5.1.2 Script d ’in itia lis a tio n ... 39
5.1.3 Mise en forme des s im u la te u rs ... 40
5.1.4 Im pact de l’approche dynam ique ou quasi-statiq ue sur les sim ulateurs . . 41
5.2 Sim ulateur q u a s i - s t a t i q u e ... 42
5.2.1 Cycle de c o n d u ite ... 42
5.2.2 D ynam ique longitudinale du v é h ic u le ... 43
5.2.3 T ran sm issio n s... 46 5.2.4 M oteur et c o n trô le u r ... 49 5.2.5 B a t t e r i e ... 50 5.3 Sim ulateur d y n a m iq u e ... 51 5.3.1 B a t t e r i e ... 51 5.3.2 M oteur et c o n trô le u r ... 52 5.3.3 T ran sm issio n s... 52 5.3.4 P n e u ... 54
5.3.5 D ynam ique longitudinale du v é h ic u le ... 58
5.3.6 Contrôleur de v ite s s e ... 59 5.3.7 Contrôleur de g lisse m e n t... 61 5.3.8 B ila n ... 63 6 A n a ly s e d e s r é s u l t a t s e t v a lid a tio n 6 5 6.1 Véhicules t e s t é s ... 65 6.1.1 Tricycle m o t o r is é ... 65 6.1.2 Q u atre roues m o t r i c e s ... 66 6.2 E tu d e d ’un cycle de c o n d u i t e ... 66
6.2.1 D ynam ique longitudinale du v é h ic u le ... 66
6.2.2 Transmission à un rap p o rt f i x e ... 66
6.2.3 Puissances, énergies et e f f ic a c ité s ... 68
6.3 E tu d e de l’a c c é lé ra tio n ... 70
6.3.1 D ynam ique longitudinale d u v é h ic u le ... 71
6.3.2 C ontrôleur de g lisse m e n t... 73
6.3.3 Modèle du pneu ... 73
6.3.4 T r a n s m is s io n ... 74
6.4 V a lid a tio n ... 76
6.4.1 Com paraison des sim ulateurs q u asi-statiq ue et d y n a m iq u e ... 76
6.4.2 Com paraison avec un a u tre sim ulateur ... 78
6.5 C onclusion... 80
TABLE DES M A TIÈ R E S vii
7.1 M éthodologie de l’exploration p a r a m é t r i q u e . . 83
7.2 E tude d y n a m iq u e ... 84
7.2.1 Tem ps d ’a c c é lé ra tio n ... 84
7.2.2 Vitesse m a x im a le ... 85
7.3 E tude énergétique ... 87
7.3.1 Consom m ation d ’é n e r g ie ... 87
7.3.2 D istrib ution d ’é n e r g i e ... 88
7.4 Conclusion sur l’ensemble des outils de conception ... 89
8 E tu d e param étrique 91 8.1 Véhicule é t u d i é ... 91
8.1.1 D escription du v é h i c u l e ... 91
8.1.2 Plages de variation et valeurs p ar défaut des p aram ètres d u véhicule . . . 91
8.2 A c c é lé ra tio n ... 92
8.2.1 Influence des param ètres s e u ls ... 93
8.2.2 Influence de couples de p a r a m è t r e s ... 101
8.2.3 Influence d ’un trip let de param ètres ... 104
8.2.4 P rem ier é ta t de la c o n c e p tio n ... 104
8.3 Vitesse m a x im a le ... 104
8.3.1 Influence des param ètres s e u ls ... 104
8.3.2 Influence de couples de p a r a m è t r e s ... 110
8.3.3 Second é ta t de la conception ... 112
8.4 Bilan de l’étude d y n a m i q u e ... 112
8.4.1 Un rap p o rt f i x e ... 112
8.4.2 Une boîte de vitesses à deux ra p p o rts ... 112
8.5 A utonom ie ... 113
8.5.1 E tu d e g é n é r a l e ... 113
8.5.2 E tu d e de se n sib ilité ... 113
8.5.3 Influence du r a t i o ... 116
8.5.4 Intérêt du frein ré g é n é ra tif... 118
8.5.5 C apacité des a c c u m u la te u r s ... 118
8.6 B i l a n ... 120
9 C onclusion 121
A P aram ètres du tricy cle roadster 123 B P aram ètres du véh icu le to u t-terra in 137 C S tructure d es scrip ts d ’exp lo ra tio n p aram étriq u e 149 D P aram ètres du tricycle roadster à p e tit e p la te-fo rm e 151
LISTE DES FIGURES
2.1 Schéma des principales com posantes de la chaîne de m o t o r i s a t i o n ... 4
2.2 O bjectifs des caractéristiques de b a tte rie p ou r des véhicules é le c tr iq u e s ... 5
2.3 Deux types de m oteurs synchrones intégrables à un véhicule é l e c t r i q u e ... 7
2.4 Courbes de couple de m oteur électrique et à com bustion i n t e r n e ... 8
2.5 Cycle de conduite M VEG-95... 12
2.6 Cycle de conduite W M TC 3... 12
2.7 Exemple de représentation d ’un m odèle dyn am ique... 13
2.8 Exem ple de représentation d ’un m odèle dynam ique asservi en vitesse... 13
2.9 Exemple de représentation d ’un m odèle q u asi-statiq u e... 14
2.10 C arte d ’efficacité d ’un m oteur synchrone à aim ants d é p o s é s ... 15
4.1 Référentiels d ’é t u d e ... 24
4.2 Bilan des forces s ’exerçant sur un véhicule... 27
4.3 Rayon efficace du p n e u ... 29
4.4 Courbes typiques du coefficient de friction... 30
4.5 Schéma bloc du modèle du pneu en régime p e r m a n e n t ... 31
4.6 Modèle du com portem ent tran sito ire tangentiel du p n e u ... 32
4.7 Modèle causal d ’une tra n s m is s io n ... 35
4.8 Modèle causal du m oteur et du c o n t r ô l e u r ... 37
4.9 Modèle causal de la b a tte rie ... 37
4.10 Modèle général du véhicule ... 38
5.1 Vue générale du sim ulateur qu asi-statiq u e... 42
5.2 Simulation quasi-statique du cycle de c o n d u ite ... 42
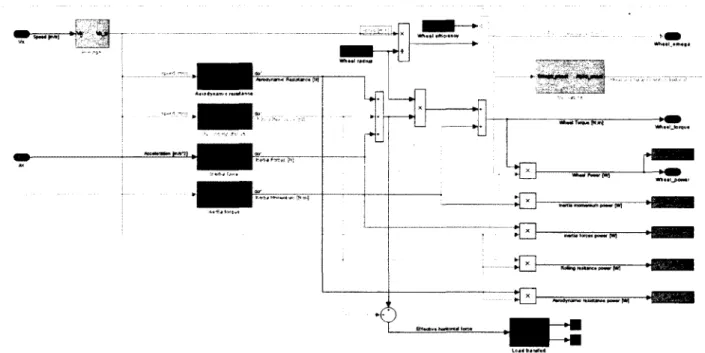
5.3 Simulation quasi-statique de la dynam ique longitudinale du v é h i c u l e ... 44
5.4 Simulation quasi-statique de la force de résistance au r o u le m e n t ... 44
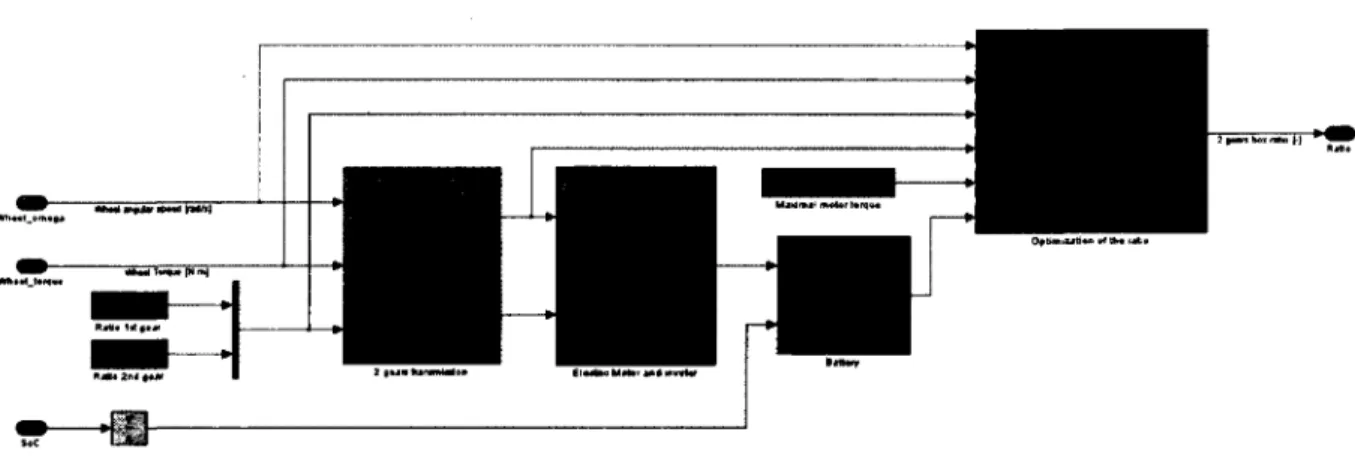
5.5 Simulation quasi-statique des trois types de transm issions... 46
5.6 Simulation quasi-statique de la transm ission à un ratio fixe... 47
5.7 Simulation quasi-statique du contrôleur de la boîte à deux ra p p o rts ... 47
5.8 Simulation quasi-statique du contrôleur de la C V T . ... 48
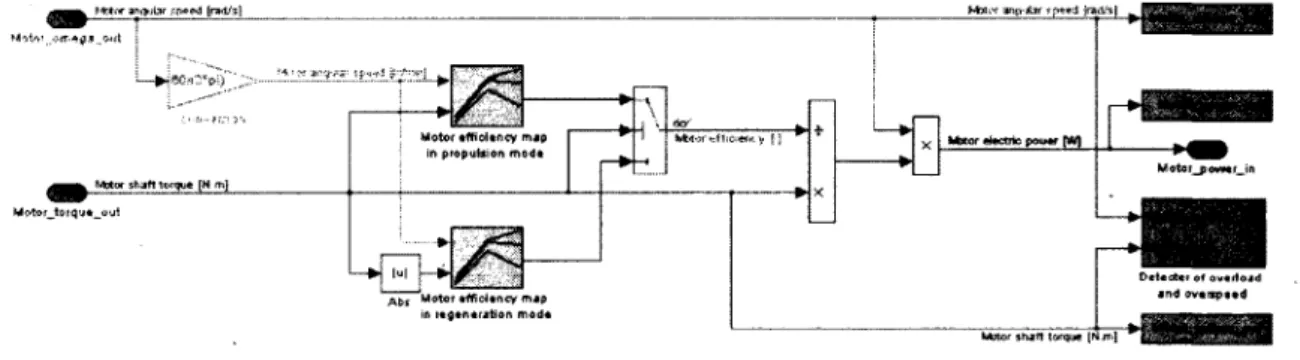
5.9 Simulation quasi-statique du m oteur et de son c o n trô le u r ... 49
5.10 Simulation du d étecteur de dépassem ent de vitesse et de couple... 50
5.11 Simulation quasi-statique de la b a tte rie ... 50
5.12 Vue générale d ’un sim ulateur dynam ique avec un asservissem ent en glissement. . 52
5.13 Simulation dynam ique de la transm ission à u n ra p p o rt... 53
5.14 Simulation dynam ique de la transm ission à deux ra p p o rts ... 53
5.15 Simulation dynam ique du p n eu ... 54
5.16 Calcul d u glissem ent... 55
5.17 Dérivées partielles du modèle du p n e u ... 56
5.18 A m ortissem ent artificiel du pneu à basse vitesse... 56
5.19 Présence ou non d ’un am ortissem ent artificiel du glissem ent à basse vitesse. . . . 57
5.20 Sim ulation dynam ique du modèle de déplacem ent longitudinale du véhicule. . . . 58
5.21 Sim ulation dynam ique du véhicule ayant le cycle de conduite com me consigne. . . 60
5.22 Sim ulation dynam ique du contrôleur de vitesse... 60
5.23 Com paraison de la vitesse réelle avec la consigne donnée p a r le W M T C 3... 61
5.24 Sim ulation dynam ique du contrôleur de glissem ent... 62
6.1 Vitesse, accélération et distance parcourue d u ro ad ster ( W M T C 3 ) ... 67
6.2 Efforts appliqués sur le ro ad ster ( W M T C 3 ) ... . . 67
6.3 Couples et vitesses de rotation de la transm ission du ro a d ste r... 68
6.4 Puissance au niveau de la b atterie et de la roue d u ro ad ster ( W M T C 3 ) ... 69
6.5 Energie chimique de la b atterie ( W M T C 3 ) ... 69
6.6 Efficacité d u m oteur sur la p ortio n urbaine d u W M T C 3... 70
6.7 E ta t de charge de la batterie d u ro a d ste r... 71
6.8 Vitesse, accélération et distance parcourue d u véhicule to u t te rra in ... 72
6.9 Efforts appliqués sur le véhicule to u t te rra in en fonction du te m p s... 72
6.10 V ariation des chargem ents des essieux en fonction du te m p s... 73
6.11 Couple m oteur avant et après la satu ratio n due à l’asservissem ent en glissem ent. 74 6.12 Glissement des roues m otrices du véhicule to u t te rra in en fonction du tem ps. . . 75
6.13 Couples et vitesses de ro tatio n de la transm ission... 75
6.14 Glissement de la roue m otrice du tricycle ro ad ster sur un cycle W M T C 3... 76
6.15 Com paraison des é ta ts de charge des sim ulateurs quasi-statiqu e et dynam ique . . 78
6.16 Points de fonctionnem ent positionnés sur la carte du m o te u r... 79
6.17 P oints de fonctionnem ent positionnés sur la carte de la b a tte rie ... 79
6.18 E ta t de charge de la batterie p o ur le m odèle Excel® et Sim ulink® ... 80
6.19 Forces appliquées sur le road ster pour le modèle Excel® et Sim ulink® ... 81
7.1 Calcul de la vitesse m aximale en régime nom inal... 86
8.1 Influence de la puissance du m oteu r su r le tem ps d ’accélération... 93
8.2 Influence de la puissance du m oteur sur le tem p s de reprise... 94
8.3 Puissance nominale e t m axim ale du m o teu r en fonction de sa vitesse de ro tatio n . 95 8.4 Influence du ratio sur le tem ps d ’accélération... 96
8.5 Puissance utilisée p ar le m oteur en fonction du ratio u tilisé... . 96
8.6 Influence du ratio sur le tem ps de rep rise... 97
8.7 Influence de la masse sur le tem ps d ’accélération... 98
8.8 Influence de la masse sur le tem ps de reprise... 99
8.9 Influence de la position longitudinale du centre de gravité sur le tem ps d ’accélération. 99 8.10 Influence de la position verticale du centre de gravité sur le tem ps d ’accélération. 100 8.11 Influence de la puissance du m o teu r et du ratio sur le tem ps d ’accélération. . . . 101
8.12 Influence de la puissance du m o teu r et du ratio sur le tem ps de reprise... 102
8.13 Influence de la position du centre de gravité sur le tem ps d ’accélération... 103
8.14 Influence de la puissance du m oteur sur la vitesse m axim ale... 105
8.15 Dérivées des vitesses m axim ales p ar ra p p o rt à la puissance m o teu r...105
8.16 Influence de la puissance du m o teur su r les vitesses m axim ales sur ro u te inclinée. 106 8.17 Dérivées des vitesses m axim ales sur une ro u te inclinée... 107
8.18 Influence d u rap p o rt de réduction sur les vitesses m axim ales... 108
8.19 Influence d u rap p o rt de réduction sur les vitesses m axim ales sur ro u te inclinée. . 108
LIST E DES FIGURES xi
8.21 Influence du CdA sur les vitesses m axim ales pour un ratio de 1,5... 110
8.22 Influence de la puissance du m oteu r et du ratio sur les vitesses m axim ales... 111
8.23 D istribution de l ’énergie de la b a tte rie ... 114
8.24 Influence du CdA sur l’énergie utilisée... 115
8.25 Influence de la masse d u véhicule sur l’énergie utilisée... 116
8.26 Influence des ratios des deux ra p p o rts de réduction sur l’énergie consommée. . . . 117
LISTE DES TABLEAUX
2.1 Tableau récapitulatif des énergies et des puissances m assiques de certaines batteries. 5
5.1 Tableau récapitulatif des sim ulateurs développés... 39
5.2 Tableau récapitulatif du code couleur des modèles Sim ulink® ... 40
6.1 C aractéristiques générales du tricycle ro a d ste r... 65
6.2 C aractéristiques générales du véhicule to u t te rra in ... 66
7.1 Tableau récapitu latif des scripts développés... 84
CHAPITRE 1
Introduction
Depuis plusieurs années, la pollution atm osphérique augm ente dram atiq uem ent. La prise de conscience de l’am pleur de ce phénom ène a été longue dans les pays développés et elle doit encore se faire dans la m ajeure partie du m onde. Des solutions doivent être prises rapidem ent et avoir un im pact mondial. Cela est d ’a u ta n t plus difficile que tou s les pays n ’ont pas le même niveau de vie.
D ans un contexte d ’industrialisation des pays en voie de développem ent, l’aug m entatio n du nom bre de voitures, dotées de m oteurs à com bustion, est préoccupante. Selon l’article de Jes Fenger, il y a déjà près de dix fois plus de véhicules q u ’il y a cin qu ante ans [Fenger, 2009]. Le trafic autom obile est devenu la principale source de pollution de l’air u rbain, ce qui risque de continuer d u ran t les prochaines années.
Afin de dim inuer la dépendance de l’in dustrie autom obile aux énergies fossiles comme le pétrole et su rto u t de réduire les émissions de gaz à effet de serre, de nouvelles sources d ’énergie p e rm e tta n t la propulsion des voitures ont été étudiées depuis plusieurs années. Celle qui retien t l’atten tio n des chercheurs et des industriels est l’énergie électrique [Romm, 2006].
La propulsion électrique n ’est pas nouvelle, le prem ier véhicule électrique est a ttrib u é au Français Gustave Trouvé qui exposa son modèle à l ’E xposition Intern ation ale d ’É lectricité de P aris en 1881. D éjà en 1899, Camille Jenatzy dépassait p o ur la prem ière fois dans le m onde autom obile la barre des 100 km .h -1 à bord de la " Jam ais C ontente ". La voiture électrique sera ensuite délaissée des industriels à cause de ses faiblesses concernant la q u an tité d ’énergie qui p eu t être stockée pour un poids d ’accum ulateurs donné. C ependant, depuis une vingtaine d ’années, l’autom obile électrique assiste à un renouveau.
De nos jours, l’opinion publique souhaite, de plus en plus, des voitures consom m ant un m inim um d ’essence. Cela peut être une volonté de respecter l’environnem ent ou to u t sim plem ent le souhait de réduire le coût d ’utilisation. Ces deux argum ents font que l’in dustrie autom obile tend, certes difficilement, vers des voitures utilisant l ’électricité p lu tô t que le pétrole.
La tendance actuelle est la technologie hybride. Elle est intéressante car elle perm et une réduction de la consom m ation d ’essence et donc une dim inution de la pollution de m anière générale. Mais elle perm et aussi de conserver une architectu re de voiture classique. En effet, une voiture usuelle
possédant q u atre roues, cinq places, un m oteur à com bustion et p e rm e tta n t une grande autonom ie et des pleins rapides et faciles p eut ê tre équipée d ’une m otorisation hybride sans m odification de ses principales caractéristiques. La consom m ation est m oindre et ce n ’est pas la peine de rechercher des statio ns de recharge particulières (en com paraison avec l ’hydrogène ou encore avec le biocarburant). Concrètem ent, la technologie hybride p erm et de dim inuer la pollution atm osphérique sans modifier les h ab itudes des u tilisateurs. P our les co nstructeurs autom obiles, le fait que le conducteur ne doive pas faire de concession (le prix est to u t de même plus élevé) est un bon critère de vente [Bradley et Frank, 2009; Rom m , 2006]. C ep end an t, les véhicules hybrides ne sont pas une solution viable à long term e. Il ne s ’agit que d ’une tran sitio n vers des véhicules à zéro émission.
Au regard des technologies développées p ou r les véhicules hybrides électriques, le véhicule entiè rem ent électrique est la solution la plus prom etteuse. L ’autonom ie reste leur point faible m ais elle est suffisante pour la p lup art des tra je ts que la po pulation effectue tous les jours. Le conduc teur journalier doit se rendre com pte q u ’un véhicule pouvant faire près de 700 km avec un plein d ’essence est bien trop surdimensionné. D ’ailleurs, peu de personnes connaissent vraim ent l ’au to nomie de leur véhicule. Les déplacem ents entre le lieu d ’h a b ita tio n e t le lieu de travail dépassent rarem ent les 100 km mais ils représentent néanm oins la plus grande cause, de pollution urbaine [Fenger, 2009]. De même, la plupart des u tilisateu rs se retrouvent seuls dans leur voiture de cinq places lors de ces trajets. Une to nn e de m étal et de plastique serait-elle nécessaire p o ur tran sp o rter une personne de moins de 80 kg su r une p etite centaine de kilom ètres chaque jo u r ? C ’est pourquoi, pour une pleine efficacité des véhicules électriques, il fau t accepter de repenser l’automobile de demain.
Ainsi, si la source de courant nécessaire à la recharge est d ’origine non p olluante comme l’énergie solaire ou l’éolien, il est possible de posséder u n véhicule rem plissant une grande p a rt des besoins de la population en dim inuant énorm ém ent l’im pact environnem ental. De plus, le coût d ’une recharge ne devrait pas dépasser le dollar selon le prix de l’électricité en 2010.
Les travaux de cette m aîtrise s ’inscrivent dans la conception de tels véhicules électriques. L ’étud e principale repose sur un véhicule particulièrem ent innovant p ar sa forme de tricycle et ses capaci tés sportives. La recherche consiste à trouver le moyen de faciliter le dim ensionnem ent de la chaîne de m otorisation constituée de tous les élém ents entre la b atterie et la roue. C ette chaîne doit être efficace afin de maximiser l’autonom ie m ais cela ne doit évidem m ent pas se faire aux dépends des caractéristiques du véhicule (vitesse m axim ale, accélération...). A ctuellem ent, cet exercice de conception prélim inaire est effectué en interne dans les différentes entreprises autom obiles plus ou moins efficacement. C ependant leurs résu ltats et leurs outils ne sont pas publiés.
Enfin, cet exercice n ’est que le prétex te du développem ent d ’u n panel d ’outils inform atiques, constitué de sim ulateurs et de scripts d ’exploration param étrique, utile lors de la conception de to ut véhicule électrique.
CHAPITRE 2
Revue de la littérature
La revue de litté ra tu re doit se faire dans deux dom aines : le véhicule électrique et sa sim ulation. En effet, les technologies utilisées à bord d ’u n véhicule entièrem ent électrique sont en p erp étuel développement depuis le début du 20eme siècle. Ce chapitre a p o ur b u t de souligner les avantages et inconvénients de chacune d ’elles. Enfin, ces élém ents seront modélisés ce qui dem ande de faire l’état de l’art de la sim ulation des véhicules électriques et des logiciels disponibles.
2.1
V éh icu le électrique
La technologie des véhicules électriques est connue. Des dizaines de véhicules ont d ’ores et déjà été commercialisés. De nos jours, plusieurs m odèles voient le jo u r que ce soit des véhicules citadins ou des roadsters de luxe.
Les constructeurs autom obiles du m onde entier développent des voitures sportives de luxe. Leurs m otorisations électriques leur p erm etten t des accélérations fulgurantes.
La EX1 du constructeur français Peugeot© est capable d ’évoluer de 0 à 100 k m .h -1 en 3,58 s et peut attein d re sa vitesse m axim ale de 260 k m .h -1 en moins de 7 s. La firme Tesla©, installée en Floride, commercialise son roadster qui réalise la même accélération en 3,7 s. La com pagnie anglaise The Lightning Car Company® a nomm ée, q u an t à elle, sa sportive électrique The Light- ning G T. Ces roadsters sont des vitrines technologiques qui servent à convaincre le public des capacités des voitures électriques.
Au vue de cet engouem ent, les grands constru cteurs essayent de ren dre la voiture électrique accessible. La IO N de Peugeot® , la C-Zéro de C itroën© ou encore la Blue Car de Bolloré© sont des bons exemples de voitures de tailles réduites destinées au tra n sp o rt urbain.
Ce paragraphe consiste en un aperçu du choix des technologies, concernant les principales com posantes de la chaîne de m otorisation d ’un véhicule électrique actuel recensées sur la figure 2.1.
2 .1 .1 B a t te r ie s
C aractéristiques actu elles
Com mande Charge Roues M oteur électrique Transmission Convertisseur Source d'énergie extérieure Source d'énergie interne (Batteries)
Figure 2.1 - Schéma des principales com posantes de la chaîne de m otorisation d ’un véhicule électrique. La source d ’énergie externe et la com m ande, bien que ne faisant pas p artie de cette chaîne, sont ajoutées pour la compréhension. [Husain, 2003].
L ’autonom ie représente la distance m axim ale parcourue par un véhicule sans avoir besoin d ’u ti liser de source d ’énergie externe. De nos jours, c ’est le principal inconvénient des véhicules élec triques. C ’est une des barrières à l’utilisation d ’une source d ’énergie alternative dans le dom aine autom obile émises par Joseph Romm [2006]. D ans le cas d ’une propulsion électrique, c’est la ca pacité des batteries qui lim ite cette autonom ie. E n effet, l ’énergie et la puissance q u ’elles peuvent contenir pour une masse ou un volume donné, appelées respectivem ent l ’énergie et la puissance massique ou volumique, sont plus faibles que l ’essence. A utrem ent dit, ce qui lim ite la large u ti lisation de batteries dans les véhicules est le volume et la masse q u ’elles p ren nen t pour la même quantité d ’énergie em barquée ou la même puissance disponible que l’essence.
Claus Daniel [2008] décrit dans son article les caractéristiques que doivent posséder les b atteries pour que les véhicules électriques soient largem ent commercialisés. Ces propos étayent les objectifs du D épartem ent de l ’Énergies des É tats-U nis, fixés en 2008, qui sont représentés sur la figure 2.2.
L ’é ta t des caractéristiques des batteries en 2008 est particulièrem ent loin des objectifs en ce qui concerne :
• La plage de tem p érature de fonctionnem ent (l’indice est à 60 %), • L ’énergie volumique (l’indice est à 60 %),
• Le prix (l’indice est à 50 %).
B a tteries au lith iu m
Les accum ulateurs les plus p rom etteurs pour le fu tu r de la voiture électrique sont ceux à base de lithium . Comme l’article d ’H um berto Joachin et al. [2009] le rappelle, ces accum ulateurs sont largem ent utilisés dans les appareils électroniques po rtables à cause de leur grande énergie massique et leur absence d ’effet mémoire.
2.1. VÉHICULE ÉLECTRIQUE 5
Puissance massique - Décharge (300 W.kg-1)
Plage de température d'opération ( 40 à *60 °C)
Prix de vente-10.000 unités par an (160 t.kWh1)
Durée de vie (10 ans)
120" " ' -Energie massique - C/3 (160 Wh.kg-1) Puissance volumique (460 W.L1) Energie volumique - 0 3 (230 Wh.L1) Nombre de cycle - 80 % de profondeur
de décharge (1.000 cycles)
Figure 2.2 - D iagram m e des objectifs, concernant les b atteries, du D ép artem ent de l’Énergies des États-U nis. La courbe des 100 % (octogone régulier en gras) indique les objectifs à attein d re pour envisager une com m ercialisation des véhicules électriques et l ’aire grisée représente l ’état actuel des technologies de batteries [Daniel, 2008] (T raduction libre).
Le tableau 2.1 recense les caractéristiques de plusieurs b atteries afin de les com parer. Ces valeurs ne sont que des ordres de grandeur déterm inés pour des accum ulateurs de voitures électriques ou hybrides (entre 10 et 50 Ah). Ces données proviennent de plusieurs sources : [Ehsani et a i, 2005; Husain, 2003; Miller, 2004; W estbrook, 2001]. A noter égalem ent que des valeurs différentes peuvent être obtenues suivant l ’é ta t de charge, la capacité de l’accum ulateur, la tension et le courant de décharge.
Tableau 2.1 - Tableau récapitulatif des énergies et des puissances m assiques de certaines batteries. T y p e d e b a t t e r i e E n e r g ie m a s s iq u e
( W h . k g 1)
P u is s a n c e m a s s iq u e ( W . k g - 1)
Acide - plomb 40 150
Nickel - cadm ium (NiCd) 60 150
Nickel - hydrure m étallique (NiMh) 70 200
Lithium - ion 100 220
Lithium - polym ère 150 350
Lithium - phosphate (LiFeP0 4) 100 3000
Essence > 12000
-Les batteries au lithium ont des meilleures caractéristiques que celles, plus âgées, au plomb, cadm ium ou nickel. C ependant, elles ne sont pas sûres lors d ’utilisations abusives comme une
surcharge, une décharge rapide (court-circuit) ou un bris. C ’est un obstacle à l’application à grande échelle su r des véhicules d em and ant une puissance plus im p o rtan te que les appareils électroniques portables. Une des solutions a été d ’utiliser une cathode constituée de LiFePCU (lithium , fer et phosphate), l’anode étant toujours constituée de lithium . Les m atériau x de cette cathode sont abondants et ils ne sont pas néfastes vis à vis de l’environnem ent [Joachin et al., 2009]. Les caractéristiques actuelles de ce ty p e de b a tte rie sont recensées dans le tab leau 2.1. Des études ont été réalisées ces dernières années et d ’au tres sont en cours afin d ’optim iser ces batteries. K arim Zaghib est un chercheur de l’In s titu t de recherche d ’H ydro-Q uébec (IR EQ ), centre à la pointe du développem ent des b atterie s LiFeP0 4. Son groupe de recherche tente, entre autre, d ’am éliorer la sécurité sans p e rte de perform ance [Guerfi et al., 2010], et le ta u x de charges/décharges admissibles sans perte de capacité [Joachin et a i, 2009; Zaghib et al., 2010]. C ette technologie arrivera à m atu rité dans quelques années bien q u ’elle soit commercialisée depuis 2001 [Tarascon et A rnand, 2001]. Le prix de ces b atteries est encore pro h ib itif m ais la hausse de celui du pétrole e t l’augm entation du nom bre de véhicules électriques p ro m et de faire baisser ce coût dans les années à venir.
2 .1 .2 M o te u r s e t c o n tr ô le u r s
Les m oteurs à courant continu ont largem ent été utilisés dans les déb uts de la voiture électrique mais ils possèdent de sérieux inconvénients dus à l ’utilisation des balais [Husain, 2003] : vitesse limitée, interférences électrom agnétiques, entretien fréquent ...
Selon les ouvrages d ’Iqbal Husain [2003] et de M ichael W estbrook [2001], parm i les nom breuses machines électriques sans balais existantes, les trois types considérés p o u r la m otorisation de véhicule sont :
• le m oteur asynchrone,
• le m oteur à réluctance variable, • le m oteur synchrone.
Ces trois m oteurs fonctionnent avec des courants triphasés. E n effet, les progrès de l’électro nique de contrôle ont perm is l’utilisation de ces m oteurs sans balais (appelés brushless) p ou r des vitesses de ro tatio n variables dans le tem ps alors que la source de courant est q u ant à elle continue.
M achine asynchrone
Il s ’agit du m oteur triphasé le plus ancien. Il est généralem ent utilisé d ans l’in dustrie p ou r des fonctions ne nécessitant pas de variation de vitesse de ro tation. E n effet, il est auto-piloté et p e u t donc fonctionner en étan t branché directem ent sur le réseau trip hasé (110 V, 60 Hz ou 220 V, 50 Hz), sans avoir besoin de contrôleur. Les progrès de l’électronique de puissance ont perm is son
2.1. VÉHICULE ÉLECTRIQUE 7
utilisation dans le dom aine de l ’autom obile grâce à des contrôleurs p e rm e tta n t la variation de vitesse. Le roadster de Tesla© est équipé d ’une m achine asynchrone de 215 kW accouplé à une transm ission à un seul rap p o rt de réduction.
Sa conception est simple, sa fabrication peu chère et il dem ande moins d ’en tretien que le m oteur à courant continu [Ehsani et al., 2005].
M achine synchrone
Le m oteur synchrone est une option particulièrem ent a d ap té au véhicule électrique. Cela est prin cipalem ent dû à sa grande puissance m assique obtenue grâce à l’emploi d ’aim ants perm anents (Fer-Néodyme) au niveau du rotor. Com m e le m ontre la figure 2.3, deux types de m oteurs syn chrones à aim ants perm anents sont utilisés, l’un est à aim ants déposés l’au tre à concentration de flux [Odvârka et al., 2009].
Tôle
Aimant
Arbre
(a) R otor à aim ants déposés
Figure 2.3 - Deux types de m oteurs synchrones intégrables à u n véhicule électrique Tôle
Aimant
Arbre
(b) R otor à concentration de flux
L ’avantage de m onter les aim ants à l’intérieur du ro to r est que les saillances ajo u ten t u n couple de réluctance qui perm et d ’avoir une large plage de vitesse à puissance co nstante [Chan et C hau, 1997]. Néanmoins, l’utilisation d ’aim ants perm anents augm entent le coût des machines synchrones p ar rap p o rt à celles asynchrones.
La Lightning G T est équipée de q u atre m achines synchrones à aim ants p erm anents (une dans chaque roue).
M o teu r à rélu ctance variable
Ce m oteur est extrêm em ent simple, son ro to r ne possède ni bobine ni aim ant. Le couple résulte de la variation de réluctance du rotor. C ela lui p erm et d ’être extrêm em ent simple, efficace sur une large plage de vitesse, bon m arché et robuste. E n contre p artie, sa com m ande est plus complexe que les deux au tres types de m o teur e t il subsiste des ondulations de couples indésirables notam m ent à haute vitesse [Ehsani et al., 2005; K um ar et al., 2010].
Ainsi, de nos jours, ces qu atre types de m oteurs sont utilisés dans des véhicules électriques. Mais ils ne sont pas récents, ils sont cités d ans un é ta t de l’a rt des technologies de l’électronique de puissance fait en 1997 par C han et C hau [1997]. Bien que des progrès aient été réalisés dans ces machines et notam m ent dans l’au gm entation des cham ps rém an ents des aim ants, les plus grandes avancées faites depuis p o rten t sur leur contrôle ta n t au niveau de l’électronique que de la stratégie de contrôle.
C ontrôleur
Les caractéristiques d ’une m otorisation découlent de l’ensemble m o teu r/co n trô leu r et ne sont pas dissociables. E n effet, les capacités d ’un m o teur dépendent en grand e p a rtie de son contrôleur. Il est ainsi possible d ’améliorer le rendem ent ou les perform ances d ’u n m oteur en changeant uniquem ent son contrôle [Bastiani, 2001].
2 .1 .3 T r a n sm issio n s
Les m oteurs électriques cités dans le p arag raph e 2.1.2 ont l’avantage de développer un couple élevé pour des faibles vitesses de rotation, contrairem ent au m oteur à com bustion interne [Husain, 2003; W estbrook, 2001]. P uissance maximale Couple (N.m) Couple maximal Moteur à combustion interne Moteur électrique P uissance constante
Vitesse de rotation (tr.min'1)
Figure 2.4 - Couple en fonction de la vitesse de ro tatio n pour un m o teur électrique et p o ur un m oteur à com bustion interne [Husain, 2003] (T raduction libre).
Comme le m ontre la figure 2.4, le m oteur électrique, possède un couple élevé au dém arrage, y compris à vitesse nulle, ce qui n ’est pas le cas de celui à com bustion interne. De plus, pour la même plage de vitesse, le m oteur électrique a une puissance constante, alors que l’au tre présente u n pic pour une vitesse de rotation élevée. Ce dernier nécessite donc que sa vitesse soit constam m ent adaptée à celle des roues. C ’est le rôle de la b oite de vitesse qui com pte, pour la p lu p a rt des véhicules, 5 ou 6 rapports. Ainsi, le m o teur électrique n ’a pas besoin d ’a u ta n t de rap p o rts de réduction que celui à com bustion interne.
2.1. VÉHICULE ÉLECTRIQUE 9
Il est alors possible de changer com plètem ent la ligne de transm ission d ’un véhicule électrique. En effet, dans une voiture classique, le m oteur, situé à l’avant, fournit la puissance aux roues m otrices à travers un embrayage, une boite de vitesse, un différentiel e t des arb res de transm ission. Cet ensemble complexe est nécessaire p o ur a d ap ter la sortie d u m oteur therm ique qui varie entre 800 et 5000 tr.m in -1 à la vitesse de la roue qui varie de 0 à 1500 tr.m in -1 environ [W estbrook, 2001]. Or, le couple élevé disponible en sortie du m o teur électrique p erm et de supprim er to u te la chaîne de transm ission complexe des voitures à m o teur therm ique. A l’extrêm e, il est possible de placer le m oteur en lien direct avec la roue [Terashim a et al., 1997]. La solution consistant à placer le m oteur dans la roue est âgée (utilisée en 1900 p a r F erdinand Porsche [W estbrook, 2001]) mais elle est encore utilisée no tam m en t p ar Michelin® qui a présenté son concept Active Wheel au M ondial de l’A uto de 2008. Enfin, com m e cela a d éjà été précisé, la Lightning G T est également équipé de qu atre m oteurs logés dans chacune de ses roues. Cela perm et à cette sportive un contrôle précis de la force de trac tio n de chaque roue indépendam m ent les unes des autres. Il existe des solutions interm édiaires à la transm ission com plète classique et le m o teu r dans la roue. Elles sont composées :
• d ’un seul rap p o rt fixe, le m oteur est en prise direct avec la roue,
• de boîtes de vitesse de deux ou trois ra p p o rts (celle des véhicules à m oteurs à com bustion en ont en générale 5 ou 6),
• transm issions continuellem ent variables appelées C V T en anglais ( C ontinuously Variable Transm ission),
Les boîtes de vitesse sont à com m andes m anuelles ou autom atiques. Les C V T sont autom atiques et peuvent avoir des courroies en caoutchouc p ou r des faibles puissances ou en m étal. Ces dernières sont plus répandues pour les voitures de tailles stan d ard (1 tonne).
De plus, des contrôleurs doivent être développés p ou r les transm issions à ratio variable. Ils peuvent être considérés comme l’action du conducteur dans le cas d ’une boîte m anuelle ou comme l’au tom atism e de changement de vitesse attach é à une C V T ou à une b o îte autom atique. Plusieurs critères peuvent intervenir dans le choix d ’un ratio :
• favoriser un point de fonctionnem ent de la chaîne de m otorisation le plus efficace,
• optim iser le couple lors des dém arrages ou des reprises au x dépens de l’efficacité afin que le conducteur ait de bonnes sensations lors de la conduite,
• maximiser la vitesse de pointe,
• favoriser la régénération d ’énergie lors des freinage.
Seuls ces trois types de transm ission sont utilisés dans cette m aîtrise m ais il est possible de com biner plusieurs d ’entre elles au sein d ’une m êm e chaîne de m otorisation.
2 .1 .4 M o y e n s d e r é g é n é r a tio n d ’é n e r g ie
En propulsion électrique, il est indispensable, afin d ’optim iser l’autonom ie, de prévoir l’a jo u t de technologies p erm e tta n t la régénération d ’énergie. L ’énergie électrique s ’y p rête d ’ailleurs très bien.
Frein régénératif
Le frein régénératif perm et de récupérer de l ’énergie cinétique lors d u freinage. C ette énergie est habituellem ent dispersée en chaleur p ar les freins classiques. Sa mise en place p eu t ne requérir aucun m atériel supplém entaire : la m achine électrique fonctionne com m e une génératrice et le convertisseur perm et la charge de la b a tte rie p a r u n courant continu. Ce systèm e est efficace dans les zones urbaines [Terashima et a i, 1997] m ais il do it to u t de m êm e être doublé avec des freins classiques. En effet, le véhicule doit être capable de freiner à l’a rrê t et lorsque la b atterie est entièrem ent rechargée. Un contrôleur p erm et de sélectionner quel ty p e de frein est utilisé et à quel mom ent pour parvenir à décélérer en to u te sécurité to u t en em m agasinant un m axim um d ’énergie [Ehsani et a i, 2005].
Supercapacité
Les supercapacités sont généralem ent utilisées avec le frein régénératif car leur charge p e u t se faire avec un courant bien plus im p o rtan t que des accum ulateurs chimiques. Ainsi plus d ’énergie est récupérée lors d ’un freinage (grande puissance m assique) m ais la q u an tité stockée est plus faible que pour des batteries (faible énergie m assique). L ’a jo u t des supercondensateurs est donc réellement efficace pour des tra je ts urbains où l’énergie accum ulée p a r freinage est aussitôt u ti lisée lors des accélérations suivantes. D ’a u ta n t q u ’elle ne p eu t se conserver longtem ps d u fait d ’im portants courants de fuite des capacités.
Enfin, les forts courants de décharge adm issibles des supercapacités p erm e tte n t de meilleures accélérations en com paraison avec les b atteries. C ette technologie a u n coût non négligeable dû aux supercapacités en elles-même mais aussi des capteu rs et d u contrôle de leur charge [Yang et al., 2009].
D ivers technologies
D ’au tres technologies susceptibles d ’être intéressantes sont étudiées, com me les volants d ’inertie ou les am ortisseurs à régénération d ’énergie. N éanm oins, ces solutions sem blent aux prem iers abords plus complexes et coûteuses à placer dans u n véhicule électrique. P a r exemple, l’article de Yongchao Zhang et al. [2007] p o rta n t sur les suspensions régénératives semble suggérer que cette technologie n ’est pas aboutie pour une grosse production.
2.2. SIMULATION NUMÉRIQUE 1 1
2 .1 .5 P n e u s
Le pneu doit assurer la meilleure force de trac tio n possible, réduire la résistance au roulem ent ou encore am éliorer la tenue de route. Les efforts de recherche se concentrent principalem ent dans sa m odélisation afin de prédire le com portem ent d ’un véhicule. Les m odèles les plus précis sont ceux de Hans B. Pacejka [2006] qui a élaboré la célèbre Magic Formula. C ette formule se compose en réalité de plusieurs équations p erm e tta n t de prédire la force de tra c tio n du pneu en fonction d ’une m u ltitude de param ètres dont le chargem ent de la roue, le couple qui y est appliqué ou encore l’élasticité du pneu.
2.2
S im ulation num érique
Le sim ulateur sert à connaître l’état et à m ieux cerner les caractéristiques du véhicule électrique étudié. Le type de sim ulation, ses lim ites, ses entrés et sorties requises sont développés plus loin dans le chapitre 4 m ais les besoins im posent l’u tilisatio n de cycle de conduite.
A p artir d ’un modèle physique, il existe plusieurs façons de sim uler u n véhicule. Les deux plus couram m ent utilisées sont la sim ulation dynam ique et celle quasi-statique. Ces deux m éthodes ont leurs avantages et inconvénients et utilisent des hypothèses plus ou moins simplificatrices.
2 .2 .1 C y c le d e c o n d u ite
L ’autonom ie (la distance m aximale atteign ab le sans source d ’énergie externe) est une donnée in téressante pour un véhicule entièrem ent électrique. Elle est calculée à p a rtir de cycles de conduite qui consistent en des profils de vitesse en fonction du tem ps. Ces cycles norm alisés p erm e tte n t d ’avoir une même base pour com parer les véhicules entre eux (émission de C O2, autonom ie...).
C ertains de ces cycles sont com plètem ent fabriqués artificiellem ent comme le cycle européen M VEG -95 représenté à la figure 2.5. D ’autres sont issus de m esures réelles comme le cycle amé ricain F T P -75 [Guzzella et S ciarretta, 2005]. Le choix d ’un cycle p lu tô t q u ’un au tre est régi par la zone géographique où le véhicule évoluera (Europe, N ord A m érique, M ondial...), le typ e de véhicule (motocycle, to u t terrain, roadster) et enfin la puissance de la m otorisation. Ainsi, un p e tit véhicule urbain ne sera pas testé à plus de 90 k m .h- 1 .
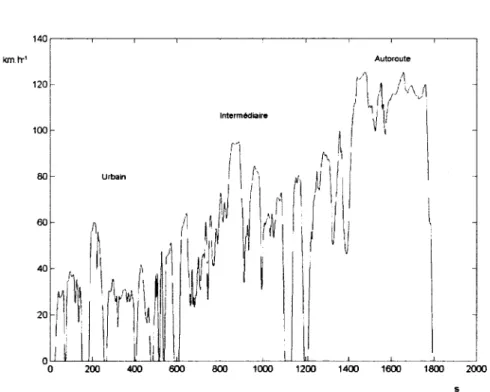
Le cycle qui sera particulièrem ent utilisé dans le cadre de cette m aîtrise est le World Motorcycle Test Cycle de classe 3 ( W M T C 3). Il est destiné aux véhicules à deux roues m ais p eu t ê tre appliqué aux tricycles. Ce cycle est issu de mesures réelles et com porte tro is portion s de 600 s chacune décrivant trois types de route (en fonction de la vitesse moyenne) ; l’urbain, l’interm édiaire et l ’autoroute. La figure 2.6 m ontre la to ta lité d u W M T C 3.
k m /h u rb ain (ECE) - 4.052 k m E xtra-urbain (EUDC) - 6.955 k m max = 120 km/h m ay = 32.5 km^h t = 1220 s d = 11.007 km 1 2 0 -100 80- cycle é lé m e n ta ire u rb a in 60- 40-2 0 -100 200 300 400 500 600 700 800 900 -1000 1200 1300 195 195 195 195 1220
Figure 2.5 - Cycle de conduite européen M VEG-95. Il est co nstru it à p a rtir de cycles élém entaires urbains ou la vitesse n ’excède pas 50 k m .h- 1 et d ’au tres ex tras u rbains avec un m axim um de
120 k m .h -1 ). 140 A u toroute 1 20 100 80 U rbain 60 40 600 1200 1600 2000 200 400 800 1000 1400 1800
2.2. SIMULATION NUMÉRIQUE 13
2 .2 .2 A p p r o c h e d y n a m iq u e
Tout d ’abord, l’approche dynam ique est l’approche scientifique la plus n atu relle car la causalité de chaque élément simulé est respectée. C ’est une approche basée sur une description physique des systèm es [Guzzella et S ciarretta, 2005] généralem ent exprim ée p a r des équations différentielles. La figure 2.7 illustre le cas d ’une m asse en m ouvem ent afin de développer la notion de modèle causal. C ette masse peut être assimilé à un véhicule sur lequel une force de propulsion est appli quée et qui est représentée par un vecteur sur le schém a suivant. Il n ’y a aucune au tre force en jeu hormis la force de gravité et la réaction du supp ort s ’an nu lant l’une avec l’autre.
F(t)=M .a(t)
F(t)
a (t)
Figure 2.7 - Exemple de représentation d ’un m odèle dynam ique. U n solide de m asse M est soumis à une force F (t) dépendante du tem ps. La seconde loi de N ew ton perm et alors d ’obtenir son accélération a(t).
L ’accélération du véhicule est obtenue su ite à l’application de la force de propulsion. L ’effet ne pouvant pas précéder la cause, il n ’est pas possible d ’im poser une accélération à la m asse afin créer la force qui la m et en m ouvement.
Le principal inconvénient de l’approche dynam ique est le tem ps de calcul. La base du sim ulateur repose sur la résolution d ’équations différentielles qui sont plus longues à résoudre que de simples équations. De plus, le respect de la causalité du sim ulateur im pose de nom breuses boucles de rétroaction. D ’après l’exemple de la m asse en m ouvem ent, repris sur la figure 2.8, si le véhicule doit suivre un profil de vitesse donné p ar un cycle de conduite, il fau t extrapoler à to u t m om ent la valeur de la force à injecter dans le système.
F(t)
a(t)
Contrôleur Intégration
V(t)
Ainsi, la vitesse de référence Vref est com parée à celle réelle obtenue p a r intégration de l ’accélé ration, elle même déduite de la force F ( t). E n fonction de l’erreur commise, le contrôleur calcule une nouvelle force de propulsion. Il s’agit d ’u n asservissem ent p ar rétro actio n qui dem ande du tem ps de calcul.
2 .2 .3 A p p r o c h e q u a s i-s ta tiq u e
Le m odèle quasi-statique est aussi appelé m odèle inverse. Son approche consiste à trouver la vitesse moyenne de véhicule d u ran t un pas de tem ps relativem ent p e tit p a r ra p p o rt à la durée d ’un cycle de conduite. Lino Guzzela conseille d ’en p rendre un d ’une seconde [Guzzella e t S ciarretta, 2005]. Le cycle fournit la vitesse et p erm et le calcul de l’accélération d u véhicule sur chaque pas de tem ps. Ces deux valeurs p erm e tte n t de calculer le couple et la vitesse de ro tatio n de la roue qui sont nécessaires pour que le véhicule ait bien cette vitesse et ce tte accélération. E nsuite, ces deux mêmes param ètres peuvent être calculés au niveau du m oteur. L ’énergie délivrée ou em magasinée par la batterie est obtenue de la m êm e m anière non-causale. La figure 2.9 reprend l’exem ple du véhicule simplifié précédent. Il doit toujours suivre une vitesse de référence mais, cette fois-ci, une approche quasi-statique est utilisée.
Modèle inverse
Dérivation
Figure 2.9 - Exemple de représentation d ’u n modèle quasi-statique. L a vitesse de référence consti tue l’entré de ce modèle et la force nécessaire à son déplacem ent la sortie. La sim ulation est discrétisée et les calculs sont valides sur chaque pas de tem ps ti. Il n ’y a pas besoin de boucle de rétroaction.
Le véhicule ainsi modélisé suit exactem ent le cycle de conduite, il n ’y a pas besoin d ’asservissem ent en vitesse ce qui perm et un tem ps de calcul très faible. C e tte m odélisation donne des résu ltats valides sur des grandes échelles de tem ps. C ependant, l’absence de cau salité et donc la nécessité de faire des hypothèses simplificatrices rendent l ’étu de des dom aines tran sito ires délicate.
Pour conclure sur ces deux approches intéressantes, la m éthode qu asi-statique p erm et d ’ob ten ir rapidem ent des valeurs valides pour un cycle com plet (autonom ie...). C epen dant, elle ne p erm et pas d ’obtenir des données fiables su r les périodes transitoires. Elle est bien adap tée p ou r calculer des autonom ies. L ’approche dynam ique p erm et de simuler tous les asp ects du véhicule avec la précision souhaitée. C ependant, le tem ps de calcul augm ente avec le niveau de sim ulation. Elle peut être utile pour observer une accélération du véhicule. Ainsi, selon le problèm e posé, l’une ou l’au tre des deux approches est utilisée [Guzzella et S ciarretta, 2005].
2.2. SIMULATION NUMÉRIQUE 15
2 .2 .4 U t ilis a t io n d e c a r t e d ’e ffic a c ité
Chaque élém ent de la chaîne de m otorisation possède son propre rendem ent qui dépend ou non de son é ta t. P ar exemple, l’efficacité d u m o teu r varie en fonction de la vitesse de ro ta tio n et du couple alors que, pour une transm ission à train s d ’engrenages fixes, elle p eu t être considérée constante.
L ’idéal pour simuler ces pertes est de posséder les cartes d ’efficacité de chaque élém ent. Ces cartes se présentent sous forme de graphique do nn ant la valeur d u rendem ent en fonction de différents param ètres. A titre d ’exemple, la figure 2.10 m ontre une carte d ’efficacité d ’un m oteur.
500 3 > Efficiency (-! —— Nom. Load 1.4x Nom. Load 450 tf> ci 400 -350 300 o'. 200 A. O' o 150 100 or 0 .9Z O * 0 86 0 8 0-3 0 5 6 fi.4 2000 ... m 2500 500 1000 1500 Speed (RPM)
Figure 2.10 - C arte d ’efficacité d ’un m oteur synchrone à aim ants déposés [Odvârka et al., 2009]. Chaque point de fonctionnem ent, défini par une vitesse de ro tatio n O et un couple T , possède un certain rendem ent.
G râce à ces cartes, le modèle est proche de la réalité m ais reste simple. Le niveau de sim ulation p eu t rester bas. Les cartes comme celles du m o teu r doivent être définies sur deux quad rants. Le prem ier est celui m ontré par la figure 2.10 qui est le dom aine d it m oteu r (T > 0, fi > 0), l’au tre se situe pour les couples négatifs (T < 0, fi > 0), c’est le dom aine générateur. L ’étud e p eu t se faire sur q u atre q uadrants si il est ju gé utile d ’étu dier la m arche arrière d ’un véhicule (fi < 0). Ces cartes devraient être expérim entales dans le m eilleur des cas. E n effet, si un m oteu r ou une b atterie commercialisé semble intéressant, il est possible de faire des relevés de puissance de sortie et d ’entrée afin d ’en déterm iner le rendem ent p o ur chaque point de fonctionnem ent. N éanm oins, il se peut q u ’une carte d ’un élém ent en particu lier ne soit pas disponible. Soit il n ’existe pas encore (extrapolation des capacités d ’un élém ent), soit il est tro p coûteux à acquérir. Il est alors
possible d ’extrapoler la carte d ’efficacité à p a rtir d ’au tres existantes. P a r exem ple, un élém ent de puissance supérieure ou inférieure peut être d édu it en ap pliq uan t un facteu r d ’échelle su r l’axe des ordonnées (couple).
Il y a toutefois des inconvénients lors de l ’u tilisatio n de carte d ’efficacité pour la sim ulation dynam ique. Ces cartes sont statiques, les m esures prises p o u r la créer ont été réalisées à chaque fois pour un point de fonctionnem ent à l’équilibre (m aintenue p en d an t u n certain tem ps). Cela est parfaitem ent adapté à la m odélisation quasi-statique. M ais, des erreurs sont faîtes dans le cas dynam ique. Les valeurs des efficacités varient si la vitesse de ro tatio n , p a r exemple, est en palier ou en accélération.
Les cartes p ou r être précises devraient posséder une m u ltitu d e d ’entrée selon les cas (tem p ératu re, usure, hum idité...). Or, dans la p lu p a rt des cas les cartes ont deux, parfois trois, entrées. Les variables les plus influentes doivent donc être sélectionnées.
2 .2 .5 L o g ic ie l
Il existe plusieurs logiciels p erm ettan t de réaliser un sim ulateur de véhicule.
C ertains sont des plates-form es servant pour une m u ltitu d e de tâches comme Amesim® ou M atlab/Sim ulink® . Ces deux logiciels sont com plets (de la com p tabilité aux élém ents finis). M atlab® est adap té aux calculs m atriciels ce qui p erm et la résolution de codes rapides. Simulink® de son côté possède une interface graphique p ratiq u e qui rend la sim ulation p a r blocs lisible et ouverte à de l’ingénierie simultanée. Amsim® possède des librairies de com posants bien fournies notam m ent dans le dom aine de l’hydraulique.
D ’au tres sont spécifiques à la m odélisation de véhicule comme Advisor® [Markel et al., 2002] qui utilise l’approche quasi-statique. A l’origine, ce logiciel é ta it développé p a r N ational Renewable Energy Laboratory (N R E L) puis il a é ta it com mercialisé p a r AVL®. Le logiciel QSS (Quasi- S tatique Simulation) utilise également la même approche. Il a été développé p ar Guzzella et A m stutz [2005] après Advisor®. Ces deux logiciels sont en fait développés sous M atlab/S im ulink® et consistent en des librairies de com posants.
Les modèles quasi-statiques se présentent sous forme d ’agencem ent de blocs ordonnés ce qui convient bien pour créer une base de com posants à assem bler selon les besoins. Il existe éga lement plusieurs librairies créées pour les modèles dynam iques. C ependant, ces modèles ont le désavantage de ne pas être flexible à des changem ents de stru ctu re . E n effet, les modèles dyna m iques ne peuvent se résoudre bloc après bloc, ils doivent être résolus d an s leur ensemble. P a r exemple, dans le cas d ’une chaîne de transm ission il est difficile de passer d ’une boîte de vitesses à cinq rap p o rts à une C V T alors que cela ce fait plus facilem ent d ans u n sim ulateur quasi-statique. Selon plusieurs auteurs, D ym ola/M odelica® utilise une approche dynam ique innovante qui p er m et une meilleure flexibilité des modèles. Plus d ’inform ation à ce su jet sont disponibles dans
2.2. SIMULATION NUMÉRIQUE 17
l ’article de Treffinger et al. [2002]. Les au teu rs y présentent un cas de conversion de chaîne de transm ission hybride en utilisant ce logiciel (en allem and).
CHAPITRE 3
Définition du problème et méthodologie
adoptée
3.1
P rob lém atiq u e du p rojet
Les a ttra its du véhicule électrique vont de pair avec des inconvénients encore fortem ent présents concernant l ’autonomie. E n effet, com m e cela est développé dans la section 2.1.1, l’énergie m as sique des batteries embarquées, quel que soit leur type, reste faible en com paraison de celle de l’essence. P our combler ce m anque d ’énergie em barquée, il est possible de trouver le meilleur dim ensionnem ent de la chaîne de m otorisation (de la b atterie, incluse, à la roue) afin de la rendre la plus efficace possible.
C ette recherche d ’efficacité ne doit pas se faire aux dépends des capacités du véhicule (vitesse maximale, accélération...).
Au vue des nombreuses solutions techniques p erm e tta n t la propulsion d ’un véhicule électrique, l’optim isation de la chaîne de m otorisation dans le b u t de la rendre efficace et perform ante doit faire appel à un processus itératif. D ans un prem ier tem ps, un véhicule est défini com plètem ent p a r un ensemble de param ètres. E nsuite, des mesures sont faites p ou r quantifier ses capacités et caractéristiques (autonom ie, accélération ou encore vitesse m axim ale). Puis, certains param ètres ou configurations sont modifiés pour pouvoir effectuer de nouvelles m esures. C ette succession d ’opération est effectuée ju sq u ’à l’obtention d ’un m axim a, d ’un m inim a ou encore d ’un com prom is concernant certains param ètres définis p a r le concepteur. Il est possible d ’appliquer cette m éthode itérative sur un modèle numérique du véhicule. Les intérêts évidents de la sim ulation, p a r rap p o rt à la réalisation de prototypes, sont u n gain de tem ps de développem ent très im p o rtan t et un coût bien plus faible.
Ce processus doit prendre en com pte les param ètres de la m otorisation et de son contrôle, des batteries, de la transm ission mais aussi de nom breux au tres p aram ètres du véhicule qui sont physiquem ent indépendants de la chaîne de m otorisation comme le coefficient de traîn ée aérody nam ique, sa masse, la consom m ation des équipem ents électriques auxiliaires...
3.2
O b jectifs
O b jectif principal
Développer un logiciel p erm e tta n t d ’optim iser les p aram ètres de la chaîne de m otorisation des véhicules électrique. C et outil est destiné à des ingénieurs développant des nouveaux produits. Il ne doit donc pas être un modèle de type b oîte noire, sa stru c tu re doit être visible, com préhensible et modifiable si besoin.
O bjectifs secondaires
Afin d ’atteind re cette finalité, trois objectifs secondaires sont visés :
1. Développer des sim ulateurs de déplacem ent longitudinal d ’u n véhicule entièrem ent élec trique.
2. Développer plusieurs logiciels p e rm e tta n t une exploration p aram étriq u e systém atique en utilisant les sim ulateurs. Ces logiciels ont p o ur b u t de calculer la valeur d ’un objectif, comme l’autonom ie ou encore le tem ps d ’accélération, pour u n véhicule virtuel donné, de modifier ce pro to ty pe (changer le set de p aram ètres le décrivant) et d ’itérer ces étapes. 3. Valider l’outil développé en réalisant une étud e com plète de la chaîne de m otorisation d ’un
tricycle roadster électrique.
3.3
M éth o d olo gie
1. Développement des sim ulateurs :
• Définir les objectifs d ’exploration systém atique que les sim ulateurs doivent p erm ettre de calculer comme le tem ps d ’accélération ou l’autonom ie du véhicule.
• Développement d ’un sim ulateur dynam ique sous Simulink®. La dynam ique lors des accélérations, reprise doit être bien modélisée.
• Développement d ’un sim ulateur en qu asi-statique sous le m êm e logiciel. Il doit per m ettre d ’obtenir les inform ations relatives à la consom m ation, l ’autonom ie et l’effica cité énergétique.
• Calage et validation des deux m odèles à l’aide de sim ulations externes et de certaines publications.
• Com paraison des deux sim ulateurs, déterm inatio n de leur plage de validité. 2. Développement d ’un logiciel d ’exploration param étriqu e sy stém atique :
3.4. MOYEN MATÉRIEL 2 1
• Réaliser les scripts M atlab© p e rm e tta n t de calculer la valeur de chaque ob jectif à p a rtir d ’un proto ty pe virtuel donné.
• Intégrer à ces scripts la m odification des p ro totypes virtuels représentés p ar les simu lateurs et les itérations nécessaires à l’étude systém atique.
• Vérifier la validité et la cohérence des résu ltats fournis n otam m ent pour les valeurs de param ètres qui sont éloignées de ceux utilisés p o ur élaborer les sim ulateurs.
3. Validation de l ’outil développé :
• Définition des valeurs centrales de to us les p aram ètres du véhicule (m asse totale, ca pacité des batteries,...) ainsi que leurs plages de variation.
• E tude de l’autonom ie et de la sensibilité des p aram ètres p a r ra p p o rt à cet ob jectif à l’aide du sim ulateur quasi-statique.
• E tude de la dynam ique du véhicule, com me la reprise, les tem ps d ’accélération ou en core la vitesse m aximale en utilisant le sim ulateur dynam ique. De même, la sensibilité des param ètres p ar rap p o rt à ces objectifs doit être analysée.
• Repérer les param ètres les plus influents p ou r chaque objectif.
• C onfrontation des résu ltats des deux études selon ces p aram ètres influents. Recherche des compromis.
• Proposition de plusieurs configurations optim ales de la chaîne de m otorisation d ’un tricycle roadster électrique.
3.4
M oyen m atériel
Ce projet de recherche nécessite peu de moyens m atériels. P o u r des raisons de com patibilité au sein du centre de recherche où la m aîtrise s ’est déroulée le logiciel M atlab/S im ulink© a été sélectionné. M atlab© perm et d ’exploiter facilem ent les sim ulateurs développés sous Simulink© afin d ’effectuer divers calculs, itérations et optim isations. Ainsi, u n seul logiciel p eu t être utilisé pour mener à term e cette m aîtrise. Les sim ulateurs et scripts doivent fonctionner avec les librairies basiques de ces deux programm es. Les livrables de cette m aîtrise po u rro n t ainsi être utilisés plus largement.
Les éventuels ap po rts de données expérim entales, com me les cartes d ’efficacité, seront fournis par des personnes travaillant sur des p ro jets extérieurs à cette m aîtrise. Le m atériel nécessaire à l’acquisition de données n ’est donc pas à p ren dre en com pte ici.

![Figure 4.3 - Rayon efficace du pneu Rw par ra p p o rt à ceux en chargem ent Ri et sans charge Ru [Bombardier, 2009].](https://thumb-eu.123doks.com/thumbv2/123doknet/5411426.126329/45.918.312.764.116.351/figure-rayon-efficace-pneu-rw-chargem-charge-bombardier.webp)