U N IV E R S IT É D E S H E R B R O O K E
Faculté de génie
Département de génie électrique et de génie informatique
Utilisation d’un différentiel mécanique pour
doubler le couple développé par deux
actionneurs différentiels élastiques pour un
robot à pattes
Mémoire de maîtrise
Spécialité : génie électrique
Matthieu T A N G U A Y
.Jury : François M IC H A U D (directeur)
Michel L AU RI A
Wael SU LEIM A N (rap p o rteu r)
1+1
Library and Archives Canada Published Héritage Branch Bibliothèque et Archives Canada Direction du Patrimoine de l'édition 395 Wellington Street Ottawa ON K 1A0N 4 Canada 395, rue Wellington Ottawa ON K1A 0N4 CanadaYour file Votre référence ISBN: 978-0-499-00332-4 Our file Notre référence ISBN: 978-0-499-00332-4
NOTICE:
The author has granted a non-
exclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by
télécomm unication or on the Internet, loan, distrbute and sell theses
worldwide, for commercial or non- commercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par télécomm unication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins com merciales ou autres, sur support microforme, papier, électronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protégé cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement
reproduits sans son autorisation.
In compliance with the Canadian Privacy A ct some supporting forms may have been removed from this thesis.
W hile these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conform ém ent à la loi canadienne sur la protection de la vie privée, quelques
form ulaires secondaires ont été enlevés de cette thèse.
Bien que ces form ulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
RESUME
En robotique, il a tou jo u rs été d iffic ile pour une ja m b e ou 1111 bras robotique d 'in te ra g ir
avec son environnement, si ce dernier est inconnu. Les interactions non désirées peuvent causer de sérieux dommages au robot ou à l'environnem ent, ce qui est encore plus critiq u e si l'environnem ent im p liq u e la présence d ’un être hum ain.
Les robots marcheurs sont sujets à ces mêmes contraintes lo rsq u ’il s'a g it de se déplacer en terrains irréguliers et inconnus. Bien que leurs jambes perm e tte nt de s'adapter aux surfaces accidentées et de fra nch ir des obstacles, les contacts avec le sol peuvent- générer d ’im portantes forces. Percevoir les contacts avec le sol ainsi (pie les forces engendrées permettent, un contrôle plus approprié du système robotique. Bien q u 'il soit possible de m u n ir les pattes de robots de capteurs de contact et de force, il reste que to u t choc se répercute sur les engrenages des actionneurs, avec le risque de les endommager. Une autre solution consiste à u tilis e r des actionneurs élastiques com pilants, i.e.. des actionneurs munis d ’un élément élastique q ui permettent, d ’a m o rtir les chocs et de percevoir les couples appliquées et retournées par l'environnem ent.
Dans le présent tra va il, nous nous intéressons à l ’u tilis a tio n d ’actionneurs différentiel élas tique (A D E ) p our la réalisation d'une a rtic u la tio n p o u r une jam be de robot. L 'A D E est un actionneur qui peut, p erm e ttre une haute densité de couple, avec une impédance mécanique intrinsèque faible et q u i peut être contrôlé en force, donc capable d 'in te ra c tio n s sécuritaires avec son environnem ent. A fin de m inim iser les dimensions et le poids de l'a rtic u la tio n to u t ('il maximisant, le couple et la vitesse, nous avons choisi d ’é tu d ie r le couplage de deux A D E à travers un différentiel mécanique p e rm e tta n t l ’élévation et la ro ta tio n d'une jam be de robot,. A in si, il est possible d ’u tilis e r le couple déployé par les deux actionneurs pour cha cun des degrés de lib e rté , au lieu d ’e xploite r les capacités d 'u n seul actionneur par degré de liberté. L ’analyse des résultats dém ontre 1111 bon com portem ent au niveau du couple
et, de la vitesse dans les deux degrés de lib e rté du différentiel. L ’in té g ra tio n pré lim ina ire de l ’a rtic u la tio n pourra être utilisée p ou r é tu d ie r le com portem ent d 'u n robot m archeur à h u it degrés de lib e rté dans des conditions d ’u tilis a tio n variées (e.g., charge variables, terra in s irréguliers).
I t is too easy to give up 011 things tlia t are
REMERCIEMENTS
Le présent tra va il est le fru it de plusieurs efforts qui n ’auraient, pas été possible sans le soutien et la colla bo ra tio n de nombreuses personnes.
Je voudrais, to u t d ’abord, dire merci à mon directeur, François M id la n d , et à M ichel L a u ria d ’avoir cru en m oi et de m ’avoir offert cette o p p o rtu n ité de réaliser ma m aîtrise an sein de l ’IntR o L ab . V otre soutien et s u rto u t la patience dont vous avez fait preuve à mon égard, ont rendu ce p ro je t réalité. M erci aussi à Wael Suleiman p o u r tes ju d ic ie u x conseils. Mes recherches furen t possibles grâce au s u p p o rt financier du Conseil de recherce en sciences et génie du Canada, la Fondation canadienne p ou r l ’innovation et le Program m e des Chaires de recherche du Canada.
M erci aux gars du labo, sans vous mon expérience n ’a urait pas été aussi enrichissante'. M erci M a re-A ntoine de m ’avoir aidé à m ’in itie r au monde des actionneurs com pilants. M erci P hilippe, ton ardeur au tra v a il et la q u a lité de ce dernier m ’ont inspiré to u t au long de mes propres travaux. M erci Pete, p ou r ces discussions toutes plus absurdes les unes que les autres. Tu as toujours su tro u ve r les mots p ou r me faire rire. Ta ténacité au tra va il n ’a pas d ’égal ! M erci Serge p our ton aide et d ’avoir toujours été là quand j ’avais besoin d ’un technicien en électronique. M erci Tamie de m ’avoir donné la chance de tra v a ille r avec to i sur K oule ! M erci D o m in ic p ou r tou te l ’aide que tu m ’as apportée', sans elle je n ’aurais pu rem ettre ce tra vail. M erci à Ben et G uifré, vous avez été des collègues de bureau exem plaire. V otre savoir sans borne a fa it de m oi une m eilleure personne. Je suis content de p ouvoir vous com pter parm i mes amis. M erci François Ferland de m ’avoir hébergé lors de mes dernières semaines à Sherbrooke. M erci aussi p o u r les sorties de ski, les discussions et les dégustations de whisky.
M erci à Geneviève et Yohan de m ’avoir m ontré le vélo de montagne. J ’ai appris beaucoup à vos côtés. M erci à Nie et Frank pour m ’avoir in itié au freeski. Que de p la is ir j ’ai eu à me planter sur les rails ! Jean-François, m erci p our ta soif de connaissances, de to u jo u rs te pousser plus lo in et de répondre à mes questions in fin is en électronique ! M erci à François G rondin, Hélène et Geneviève, les soupers et soirées en votre compagnie furent des plus agréables et je vous en remercie. A nnie, M a thieu , Ben B aillargeon , JP, m erci d ’avoir été mes amis et d ’avoir rendu mon expérience sherbrookoise fantastique.
M erci à C atherine p our le su pp o rt apporté lors des premiers mois de ma m aîtrise. M erci Andréanne de m ’avoir donné les encouragement nécessaires à ce que je te rm in e m a m aîtrise. Landry, B ru n, O li, M O T S , Louis-C harles : Je n ’ai aucun m ot p o u r décrire l ’im portance (pie vous avez eu et continuez d ’avoir dans ma vie. Sans vous le présent tra v a il n ’e xisterait tous sim plem ent pas.
Joël, Julie, Eve M arie, A nne-G abrielle, mon frère et mes soeurs. La vie n ’a pas tou jo u rs été facile, mais vous avez toujours été là. M erci de m ’avoir enduré, vous com ptez beaucoup p our moi.
iv
M erci maman et papa, je vous dois la vie. Vous avez toujours vu le m e illeu r en moi. M erci d ’avoir rendu possible mon rêve d ’être ingénieur. Je vous dois to u t. Je vous dédis mon travail. M erci, menu, merci, je ne le d ira i jam ais assez souvent!
TABLE DES MATIÈRES
1
IN T R O D U C T IO N
1
2
R o b o ts m archeurs
5
2.1 H ainlet... 5 2.2 A S T E R I S K ... 6 2.3 S C O R P IO N ... 7 2.4 L e i n u r ... 8 2.5 A n to n et S L A IR ... 11 2.(1 G u a r û ... 13 2.7 D LR C r a w l e r ... 152.8 Robots quadrupèdes de l ’E T H ... 16
2.9 S o m m a ir e ... 17
3 U tilisa tio n d ’un différentiel m écanique pour doubler le cou ple d ’action-
neurs différentiel élastiqu e
19
3.1 A bstra e t... 203.2 I n t r o d u c tio n ... 20
3.3 D iffe re n tia l E lastic A e tu a to r for O u r C o m p ila n t Legged R obot... 22
3.4 D iffe re n tia l D rive C oupling o f tw o D E A ... 23
3.5 E xpérim ental R .e s u lts... 26
3.5.1 Torque M agnitude ... 27
3.5.2 Torque B a n d w id t h ... 27
3.5.3 C urrent versus Torque M e a s u re m e n ts ... 28
3.5.4 V elocity versus Torque M e a su re m e n ts... 29
3.6 Conclusion and F uture W o r k ... 29
4
C O N C L U S IO N
37
A S y stèm e électron iq ue de la plateform e exp érim en tale
39
LISTE D ES R É F É R E N C E S
43
LISTE DES FIGURES
2.1 R obot H am let [11] 5
2.2 D D L d ’un dos jam bes de Hamlot [ 1 1 ] ... 6
2.3 Robot A sterisk [ 1 3 ] ... 7
2.1 S C O R P IO N on config u ra tion M et capteur dans la jam be [48] ... 9
2.5 C aption for L O F ... 9
2.G Lem ur I lb sur un m ur d'escalade ... 10
2.7 C aption for L O F ... 11
2.8 C aption for L O F ... 12
2.9 C aption for L O F ... 13
2.10 C aption for L O F ... 13
2.11 Robot G uarâ [ 1 2 ] ... 14
2.12 Pied et les in te rru p te u rs sur le robot G uarâ [ 1 2 ] ... 15
2.13 C aption for L O F ... 16
2.1-1 C aption for L O F ... 17
3.1 D E A 's block d ia g ra m ... 22
3.2 D E A 's schematies... 23
3.3 D iffe re ntia l d rive mechanisni w ith the différent D O F : Isom etric view (to p) ; Front view (m idd le ) ; R ig lit view (b o tto m )... 24
3.4 Impédance eontrol diagram o f the 2-D O F D D-coupled D E A leg mechanism. 25 3.5 Four-legged robot p la tfo n n using four 2-D O F D D -coupled D E A legs . . . . 2G 3.G Torque m agnitude o f the two D E A and the resulting 2-D O F DD-coupled D E A for leg a b d u c tio n /a d d u c tio n (to p ), for leg flexion/extension (m iddle), eomparison w ith the theoretieal m odel ... 31
3.7 E xpérim ental setup for torque b a n d w id th measurement... 32
3.8 Torque b a n d w id th for one D E A (to p ) and phase sh ift (b o tto n i) ... 33
3.9 Torque b an d w id th for the 2-D O F D D -coupled D E A mechanism (to p ) and phase s h ift (b o tto m )... 34
3.10 C u rre n t versus to n ju e for the a b d u c tio n /a d d u c tio n axis (to p ), for the flexion/extension axis (m idd le ), and combined data for both a b d u c tio n /a d d u c tio n and flexion/extension along w ith the results for one D E A (b o tto m )... 35
3.11 V elocity versus torque for the a b d u c tio n /a d d u c tio n axis (to p ), for the flexion/extension axis (m iddle) and com bined data for b o th a b d u c tio n /a d d u c tio n and flexion/extension along w ith the results for one D E A (b o tto m )... 36
A . l Connexion des différentes composantes de l'électronique du m archeur A D E 39 A .2 C arte U n i-D riv e V 2 avec ses différentes entrées/sorties ... 40
A .3 C a rte d ’a lim e n ta tio n J0-Power avec ses différentes entrées/sorties ... 40
A .4 M odule Pie32 Dev ... 40
LEXIQUE
A c t io n n e u r : Est l'élément d ’un robot qui génère le mouvement. Dans la p lu p a rt des applications en robotique mobile, il transform e l'énergie électrique en énergie mécanique. A la différence' du sim ple m oteur électrique, il reçoit des commandes d 'u n contrôleur. De plus, il peut, par l'entrem ise de capteurs (e.g., position, force), retourner de l ’in fo rm a tio n au contrôleur.
Im p é d a n c e m é c a n iq u e : Est la résistance mécanique au mouvement- q u'un système offre, à une force qui lu i est appliquée. Par exemple, si un mouvement (.r/y) est appliqué à un système, une force (F /.) doit être transm ise afin de vaincu' les forces de réactions développées par le système. Si le système est- irréversible', les forces seront grandes et l'im pédance sera élevée. Si les forces de> réaction sont faibles e't que' le1 système est réversible, l ’impeielane'e? est dite? faible?. L'impealanee' de' sortie' est ele?finie' em re'liant le memvememt ,i'i
à la force F/,, e’t, élans le' elennaine? ele Laplaec la relatiem est Z(.s) = F /^ .s )/./-/,^ ) [31]. I n t e r a c t io n : Un nebeit interagit meVanieiue?me'nt ave’c sem e?nvire>nne?ment (pianel la ely- namiejue? élu système' (re>be>t- e't e?nvironne?me?nt en eeentae't) est suffisam nmnt elifféicnte ele la elynamicjue' du tobert seuil. L 'u tilis a tio n élu mot interactio n est pimnnemt epialitative. L ’interaetiem jejiic; prineipale'me’nt sur eleuix facteurs prineipaux : sur la s ta b ilité et les per-
formane-es élu mbeet. Elle* peut e'itre emiise? élans l ’analyse si e’ile1 n ’affecte' ni la s ta b ilité , ni les performances, ce’ epii est rare?me?nt- le’ e'as [30], [G].
J o in t : Aussi appelé paire? ciném atique, c ’est- l ’élément q u i relie eteux e-orps rigieles en lim ita n t lenir me)uve?me?nt re?latif. Les types le plus souvent utilisés élans la eoneeption ele' robeits marcheurs sont. les jo in ts ro ta tifs et prismatiejues. Ces deux types pe’rm e'ttent seule?me?nt un ele?gré ele' lib e rté entre' les eleux e'orps rigieles [7].
M a r c h e u r s s ta tiq u e s : Ils semt une’ classe ele reibeits marehenirs. Leur partie-ularité est ejue lejrseju’une: em plusieuirs pat-tes se»nt e?n tra n sfe rt (i.e., eflcs ne? sont pas en cemt-act- ave?e le sol), la projectiem élu e:eintre ele? masse élu rerbot d o it être à l ’intérieur, excluant le périmètre', du polygone? ele' e'emtae't.
M e m b r u r e : Cenps rigiele' situé entre' eleux jeunts el'un membre? rerbotieiue [7].
P o ly g o n e d e c o n ta c t : Se' eléerit e eumne la figure géemiét-rieiue? “ elessinée” par les pehnts ele? e'ontact au sol el’un reebeet marcheur.
CHAPITRE 1
INTRODUCTION
De nouvelles percées technologies donnent des options et des o p p o rtu n ité s à l'h u m a n ité (pii n ’étaient pas possible d ’envisager il y a d ix ou quinze ans. Par exemple, à la fin des années 80, personne ne s’a tte n d a it à ce qu'une décennie plus ta rd , l'in te rn e t change notre perception du monde. Les robots entrent dans cette catégorie de percées technologiques. Il y a d ix ans, les robots étaient confinés à des usines hautem ent industrialisées. C 'é ta it inim aginable de voir (tes machines autonomes à l ’in té rie u r de tous les foyers. Cependant au jo u rd ’hui, ce n ’est pas hors du commun de tro u v e r dans les maisons des robots-aspirateurs tel (pie le Roomba, c o n stru it par iR obot inc.. La variété de tâches que les robots peuvent accom plir g ra n d it donc continuellem ent.
L ’un des aspects (pii a reçu beaucoup d ’a tte n tio n ces dernières années est la capacité d ’in te ra g ir sécuritairem ent, i.e., avoir des robots (p ii opèrent dans ht même environnem ent de tra v a il (pu; les hum ains, sans danger. Le défi p rin c ip a l est de donner aux robots la capacité d ’in té ra g ir de manière sécuritaire avec leur environnem ent. C'est le cas des robots marcheurs. Jusqu’à ci; jo u r, la grande m a jo rité des robots m archeurs sont rigides et non com pilants. A la différence des humains, des anim aux et même des insectes, ces robots ne peuvent pas s’adapter mécaniquement à un environnem ent to u t-te rra in . Depuis quelques années, de nouveaux actionneurs furent développés dans le but d ’am éliorer les interactions avec leur environnem ent et les humains. Cependant, plusieurs tardent toujours à être ut ilisés sur des robots marcheurs.
Les robots marcheurs présentent des caractéristiques différentes des robots à roues ou à chenilles. Les robots à roues sont p lu tô t rapides et possèdent 1111 bon ra pport charge/poids.
Ils sont aussi faciles à co ntrô le r et leurs composantes sont plus standards, et donc moins coûteux. Leur p rin c ip a l désavantage est q u ’ils nécessitent un te rra in relativem ent plat. La p lu p a rt des robots à roues ne peuvent pas traverser des obstacles qui sont plus haut que la m o itié du rayon de leurs roues. Les robots à chenilles présentent une am élioration p our le déplacement sur un te rra in légèrement plus accidenté. Par contre, ils représentent un défi de ta ille p our le contrôle. Par exemple, à cause de la fric tio n des chenilles avec le sol, l ’odom étrie est, d iffic ile à im plém enter. Les robots marcheurs représentent alors la m eilleure o p tio n p o u r une bonne m o b ilité sur 1111 te rra in d iffic ile [34], et ils s'adaptent
2 C H A P IT R E 1. IN T R O D U C T IO N
aussi plus facilem ent à un environnem ent inconnu [8]. C ette fa c ilité vie n t en partie' de? la c o n trô la h ilité rie charpie degré de lib e rté, ail d é trim e n t de la com plexité du système'. Grâce1 à le u r capacité d ’être d éplew s à l ’in té rie u r d ’une1 granele variété d'environnem ents, les robots marcheurs sont une1 o p tio n intéressante p ou r plusieurs tâclu's. Le's principales sont ('elles (}ui pourraient é v ite r aux hum ains ele tra v a ille r dans eles environnerne-nt dangev reux. Les robots marcheurs sont l ’une des options étudiées pour l ’exploratiem planétaire1 [2G, 27]. Les opérations de recherche et sauvetage à l ’in té rie u r des b âtim ents effondres ou les zones touchées par les trem blem ents de terre sont eles tâches epie les marcheurs pou rraie n t faire plus rapidemeuit sans m e ttre des vies supplém entaires em jeu [24]. Un a utre dom aine el’exploitatiem possible est l ’inspection et la m aintenance de b âtim ents qui doivent être réalisés dans eles endroits difficiles d ’accès, ce epii devient en soit un défi [25]. Il y a aussi les bâtim ents epii sont une source1 de dangeus intrinseèepies pour l ’hum ain comme les centrales nucléaires, les plateformes de1 forage en liante1 m er et les usines de1 prexluits c'himiepie's.
M algré la granele dive-rsité eles tâches epii peuvent être accomplies par les robots mare-heurs,
c e r t a i n s p r o b l è m e s p e r s i s t e n t . Le p r i n c i p a l est le m om ent où la jam be e n tr e1 e n c o n t a c t
avec le sol. Au même moment epie la vitesse augmente, la force de1 l ’im pact augmente1 aussi. C ette période est brève1 mais intense1 [2], C ette problém aticpie est liée à la com pliance du système pendant l ’im pact. La com pliance a aussi un effet p o s itif d u ra n t l ’in te ra ctio n de la ja m b e avec l ’environnement, [36] et peut être utilisée pour à d ’autres fins comme1 la perception des points ele contacts de la jam be avec l ’environnem ent.
Le; b u t de; ces travaux de; rcchcuche est de développer et d ’analyser une artic-ulation robo- ticpie u tilis a n t eles actionne'urs com pilants, plus spécifiquem ent des actionneurs différentiel él&stiejues (A D E ) [29]. Les actionneurs élasticpies peuvent amener d 'im p o rta n ts bénéfices aux robots marcheurs epii doivent évoluer en te rra in irrégulier. A fin ele m in im ise r les d i mensions et le poids de1 l'a rtic u la tio n to u t en m a xim isan t le couple cet la vitesse1, nous avons choisi d ’é tu d ie r le couplage de deux A D E à travers un diffé re n tiel mecaniepie1 perm ettant l ’élévation e't, la ro ta tio n d ’une ja m b e ele robot. A in s i, il est possible d ’u tilis e r le1 couple déployé par les deux actionneurs p our chacun des degrés ele lib e rté, au lieu d ’e;xploiter les capacités d ’un seul actionneur par degré de lib e rté. L ’usage d ’un d iffé re n tiel méca nique? s’avère bénéfiejue pour la réalisation de poignets robotisés [46] ou encore de bras m anipulateurs [50].
Le; preseait, mémeâre; est enganisé ele la façon suivante. Le d ia p itre 2 présente une revue de la litté ra tu re ; sur les robots à pattes, plus spécifiquem ent les robots marcheurs statiepies,
3
m e tta n t en évidence les capacités de perception des forces de contact et de compliance. Le chapitre 3 présente l ’a rtic le rédigé sur le système réalisé. Le ch ap itre 4 conclut le mémoire. L ’annexe A présente des inform a tion s supplémentaires sur le système électronique de la plateform e expérim entale développée, in form a tion s non traitées dans l'a rtic le présenté au chapitre 3.
CHAPITRE 2
Robots marcheurs
N otre in té rê t dans cette revue de litté ra tu re p orte sur les robots marcheurs statiques m ulti-jarnbes (m oins que h u it) car c ’est cette catégorie' de robots qui concordent avec les o rientations du p ro je t, soit la conception d ’a rtic u la tio n com pilante de manière à m in im i ser la niasse dans les pattes du robot. Les robots m archeurs dynam iques (e.g., B ig Dog [42]) im p liq u e n t des pattes avec des mécanismes beaucoup plus complexes et q u i vont au delà des o bjectifs du présent tra va il. Sept robots marcheurs sont présentés su iv i d ’un résumé des caractéristiques de ces plateform es afin de m e ttre en évidence leurs principales caractéristiques.
2.1
Hamlet
Figure 2.1 R obot H am let [11]
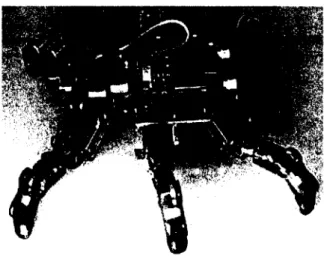
La figure 2.1 m ontre le ro b ot H am let [11], développé à l ’ U niversité de C a n te rb u ry en Nouvelle Zélande. C ’est un marcheur statique hexapode inspiré de principes biologiques des insectes. Comm e plusieurs robots de ce type, il présente tro is degrés de lib e rté (D D L ) par jam be. Chacune de ses jambes sont identiques. La figure 2.2 illu s tre ces tro is D D L . Le prem ier est situé au niveau du châssis du robot et est orienté sur l ’axe vertical. Puisque le m oteur tra v a ille dans cet axe, aucun couplage n ’est nécessaire p our o b te n ir le m ouvem ent
6 C H A P IT R E 2. R O B O T S M A R C H E U R S
désiré. Par contre, ce choix de configuration p our les m oteurs augmente légèrement la hauteur du centre de gravité. Pour chacun des deux autres D D L , les m oteurs sont placés le long de chacune des autres sections de la jam be. Cet, arrangement p a rtic u lie r peut avoir des effets négatifs sur la s ta b ilité du ro b ot, car la m a jo rité du poids de chacune des jam bes bouge avec celles-ci. Tous les m oteurs utilisés sont à courant continu (C C ) équipé d ’un réducteur, ce qui contribue? à augm enter grandement l'in e rtie mécanique du système et constitue une caractéristique non-désirable p ou r les interactions avec l'environnem ent. Une caractéristique intéressante du ro b ot H am let est la présence d ’un système au b o u t de chaque p a tte qui perm et de déterm iner la force appliquée au sol sur tro is axes. Ceci est accom pli grâce à l ’in té g ra tio n de trois jauges de contraintes sur une pièce de m étal qui sont conçues de manière à se déform er lorsqu’une force est appliquée. M algré toutes ces capacités, le système ne présente toutefois aucune com pliance mécanique. Une force non anticipée sur n ’im p o rte quelle p artie de sa ja m b e peut ainsi résulter en des dommages au système ou à l ’environnem ent.
Antenor
Postenor
Fémur
Coxa
Tarsus
Figure 2.2 D D L d ’un des jam bes de H am let [11]
2.2
ASTERISK
Développé à l ’U niversité d ’Osaka au Japon, la plateform e A S T E R IS K [13, 14, 24, 33. 49], m ontrée à la figure 2.3, est un type différent de m archeur hexapode. Prem ièrem ent, ses jam bes ne sont pas disposées le long de son corps, mais sur sa circonférence. Une des principales caractéristiques de ce robot est que chacun de ses membres sert de jam be et de, m a n ipu la teu r, ce (pii est référé comme étant un membre-mécanisme (lim b-m echm iism ).
2.3. S C O R P IO N 7
des membres symétriques. Si le ro b ot est retourné sur son dos, il peut continuer d ’opérer ou tro uve r une manière de retourner dans son o rie n ta tio n originale. In itia le m e n t, le robot é ta it équipé de seulement trois D D L par membre, mais dans les versions plus récentes, chaque membre est équipé de quatre D D L . Le D D L supplém entaire à un effet double : la m o b ilité du ro b ot est améliorée en o ffran t un m eilleur espace de tra v a il et un plus grand ensemble de configurations possibles ; par contre, l ’actionneur supplém entaire augmente le poids et com plexifie le contrôle.
Figure 2.3 R obot A sterisk [13]
Un in te rru p te u r m a rch e /a rrêt est u tilis é p ou r détecter le sol, un mécanisme plus sim ple com parativem ent à celui de Ham let. Par conséquent, il est possible pour le ro b o t de dé te rm in e r où se trouve le sol, mais pas la force appliquée à ce dernier. C ette approche peut sim p lifie r les problèmes reliés au contrôle et à la gestion des forces d 'in te ra c tio n . Par contre, les in te rru p te u rs ne p e rm e tte n t pas un contrôle rapide des m ouvem ents de la jam be. Avant que la jam be ne touche le sol, la vitesse d o it être réduite de m anière à prévenir les contacts à haute vitesse qui peuvent endommager le système. En e ffe t, comme c ’est le cas avec H am let, A S T E R IS K est mécaniquement rigide, une collision in vo lon ta ire peut endommager le robot ou son environnem ent.
2.3
SCORPION
S C O R P IO N [48] est un ro b ot m archeur à h u it jambes. Inspiré de l ’invertébré du même nom, il incorpore des aspects biologiques dans sa conception. Chaque jam be est com po sée de trois différents moteurs, deux situés à la base du ro b ot et le troisièm e localisé le long de la première membrure. C ette conception sim ple donne au ro b ot to u te la m o b i lité don t il a besoin p our évoluer dans un environnem ent n on -stru cturé et inconnu. Pour
8 C H A P IT R E 2. R O B O T S M A R C H E U R S
l'a id e r à se déplacer sur 1111 te rra in irrégulier, les jam bes sont équipées de deux ressorts.
Le prem ier tra va ille en combinaison avec un pote ntio m è tre de manière cà mesurer la force • V’ par la jam be sur l ’environnem ent. Le deuxième ramène le système à l'é q u ilib re quand la jam be est déchargée. En comparaison avec H am let ou S L A IR (vo ir section 2.5), S C O R P IO N dém ontre de meilleures qualités. Prem ièrem ent, le système est en mesure de mesurer les forces appliquées sur l ’environnem ent. Deuxièm em ent, le système n ’a pas à ra le n tir avant d ’entrer en contact avec le sol, car les ressorts ont la p ro priété d ’absorber les chocs. Ces deux avantages a jo ute nt à la sécurité et à la robustesse du système. Par contre, la transm ission de l ’in form a tion ne s’effectue que dans l ’axe du membre (une dim ension), ce qui lim ite la portée; du capteur.
Chaque jam be est construite avec des m atériaux légers, ce qui dim inue son poids. L ’in e rtie mécanique du système est augmentée car tous les m oteurs sont équipés d ’un réducteur afin de fo u rn ir le couple requis. M algré que le ro b ot est équipé d ’une suspension à l ’in té rie u r du second membre de chaque jam be, S C O R P IO N n ’a pas de mesures de sécurité pour tous ses moteurs. Une autre caractéristique intéressante est que la jam be permet au robot d ’adopter différentes configurations selon les besoins.
La figure 2.4 m ontre une vue de face du ro b ot dans sa configuration de base. La form e de S C O R P IO N est en M , et le corps est le p o in t le plus bas. C ette pro priété donne au ro b o t un centre de g ra vité très bas et la m ajeure p artie de la masse peut alors être placée dans la p a rtie la plus basse du robot. Cependant, le ro b ot peut adopter une forme de U inversé au besoin, comme lorsqu’il d o it passer par-dessus des obstacles. Le corps de S C O R P IO N est aussi segmenté, et entre chaque segment, il y a des jo in ts de caoutchouc q u i p e rm e tte n t au robot de surm onter des obstacles plus hauts. Le corps se plie à chaque segment p lu tô t que de devoir bouger p our a tte in dre un échelon supérieur. C ette caractéristique est p a rtic u lièrem ent intéressante pour une m eilleure a d a p ta b ilité à différent terrains, mais ces jo in ts devraient être instrum entés dans le b u t d ’être contrôlés.
2.4 Lemur
Le ro b ot appelé Lem ur II, p our Limbed Excursion Mechanical Utility Robot I I [3 5, 2G, 27], est un ro b o t m ulti-jam bes développé par le Jet P ropulsion Lab (J P L ) de la N A S A . Un des éléments im p o rta n ts du design de Lem ur I I est la fle x ib ilité de la plateform e. Un exemple de cette fle x ib ilité est l ’habileté du ro b ot à effectuer plusieurs tâches sans avoir recours à des opérations externes. Un deuxième exemple est la capacité du robot de pouvoir bouger dans n ’im p o rte quelle direction. C ette caractéristique est permise grâce à l
2,1. L E M U R 9 Thoracic r ~ * i B“ *l*r L 7 i r l - i-.- i Riflht w S Body • •2 I H .S c m 40 cm i - j
Figure 2.4 S C O R P IO N en configuration M et capteur dans la jam be [48]
distance' de chacune des jam bes/m em bres a u to u r de sa circonférence. Aussi, un mécanisme de déclenchement, rapide1 a été créé pour changer facilement, et efficacement les différents o u t i l s u t i l i s é s par Lem ur. Cette; capacité est avantageuse p our la m o d u la rité : de nouveaux o u tils peuvent, être; conçus avec un interface identique afin d 'être connectés au robot. Aussi, chaque D D L est indépendant de tous les autres, et chacun' D D L a son propre actionneur. Ce système de jambe; est. moins complexe m écaniquement, plus modulaire' et a un espace de t.r; :* plus grand comparé aux mécanismes avec une co nfiguration à câble. Ce sont trois im p o rta n ts param ètres pour le type1 de tra va il epii est deunandé à Lem ur II. Cependant, Leunur II n ’erst. pas équipé ele manière à détecter les eontaeds au sol, une q ua lité essentielle pour tous le;s robots marcheurs tra v a illa n t dans un environnem ent ouvert et inconnu.
I I
f
t
Figure 2.5 Lem ur li a 1
10 C H A P IT R E 2. R O B O T S M A R C H E U R S
I)('ux différentes versions do Lem ur II ont été construites. Les deux ont u tilisé le concept de membre q ui n ’est ni une jam be, ni un m a n ipu la teu r. Aussi, les membres de chacune dos versions ont quatre D D L . Chaque robot est actionné par dos moteurs à CC équipés d ’un réducteur, ce qui rend h* système rigide mécaniquement. La p rincipale différence au niveau mécanique réside dans l ’in h a b ilité de Lem ur Ha a pouvoir détecter le sol. Lem ur lia , m ontré à la figure 2.5, est très sim ilaire à A S T E R IS K . Six jam bes sont placées de manière sym étrique a u to u r d ’un corps hexagonal, une configuration idéale pour des déplacements om nidirectionnels. De plus, six est le nombre de jam bres idéal pour la m a n ip u la tio n to u t en gardant une base stable. Dans le cas de Lem ur Ha, ce nombre' a été choisi pour l ’espace de tra va il q u ’il p e rm e tta it ainsi que la capacité de m a n ipu la tio n disponible.
Figure 2.6 Lem ur I lb sur un m ur d ’escalade
Développé comme un ro b o t grim peur, Lem ur I lb (figure 2.6) diffère en plusieurs points des autres variante;,s. Pe>ur commencer, le nombre ele jam bt's a été dim inué de six à ejuatre. Le- p rin cip a l avantage du nom bre réduit, ele jambes est le; poids plus léger du ro b ot, une préoccupation im p o rta n te p our l ’escalade. La masse du robot fu t dim inuée en réduisant de un le; nombre; ele D D L dans chaque jam be. De plus, de manière à m axim iser la portée des jambe;s, les* liens furen t augmentés. La sym étrie axiale est une caractéristique intéressante car le; robot, ne d o it pas être dans une o rie n ta tio n p a rticulière p our accom plir ses tâches. Lem ur I lb est équipé d ’un o u til spécial : une perceuse ultrasonique. Cet o u til p a rtic u lie r sert le’ robot dans ses déplacements. Il est en mesure de tro uve r ou de créer des prises viabk's sur lesquelles le ro b ot peut s’appuyer pour grim per, pour ensuite re tire r l ’o u til.
2.5. A N T O N E T S L A IR 11
Uik î autre différence est. que cette version est équipée avec un capteur de force/couple à chaque jo in t. Donc, avec un contrôle adéquat., il est en mesure de savoir quelle force est appliquée par chaque jam be à l'environnem ent.
2.5
Anton et SLAIR
Développé à l'U n iv e rs ité O tto-von-G uericke. h' robot A nton [30], m ontré à la figure 2.7, est un p e tit ro b ot m archeur hexapode. Il est une évolution directe de S LA IR I et II [37], montrés respectivement aux figures 2.3 et 2.9. Les jambes du robot A n to n sont actionnées par tro is p e tits m oteurs et un réducteur. S im ilaire à S C O R P IO N , deux actionneurs se trouvent, au niveau de la hanche et l'a u tre au niveau du genou. Ce robot est aussi composé de trois différentes sections. E ntre chaque section, il y a (Unix D D L qui donnent à A nton une m eilleure capacité à surm onter les obstacles. C'est une am élioration par ra p p o rt à SC O R P IO N qui utiliser de simples jo in ts de caoutchouc, car il est possible d 'a vo ir un m eilleur contrôle' des mouvements du robot. De plus, il imiter plus précisément le com portem ent dos insectes franchissant, elers obstacles [37].
Figure 2.7 A n to n 2
12 C H A P IT R E 2. R O B O T S M A R C H E U R S
Les (Unix flèches noires sur la figure 2.10 pointent- deux petites jauges de contraintes qui sont utilisées de manière à mesurer la force appliquée par la jam be sur son environnement.. A n to n u tilise l ’in fo rm a tio n de ces capteurs pour cont rôler les forces appliquées. C ’est une am é lio ra tion par ra p p o rt aux autres robots q ui font seulement, l ’observation des forces. Le désavantage de cette plateform e est q u ’il n ’y a aucune compliance, passive ou active, dans le système. Ceci dim in u e la robustesse mécanique du robot .
'’ ht.t.p : / /w w w . u n i-m a g d e b u rg .d e /ie a t,/r o b o t,s la b /im a g e s /S la ir/C IM C ’.()54 5.jp g 'M ittp : / / w w w .u n i- in a g d e b u rg .d e /ie a t/n > b o ts la b /in m g e s /S L A IR 2 /D S C 8535. jp g r,h t t p : / / w w w .u iii- m a g d e b u r g .d e /ie a t/r o b o t.s la b /iiiia g e s /S L A IR 2 /D S C .. 85 3 5 .jp g
2.G. G U A R A 13
Figure 2.9 S L A IR II 1
Figure 2.10 Jauges de contraintes utilisées pour les mesures des forces 5
2.6
Guara
La figure 2.11 m ontre le ro b ot Guarâ [12], développé à l ’U niversité fédérale de E sperito Santo. Comme Lem ur I lb (section 2.4), c’est un ro b o t m archeur quadrupède. Par contre, dû à la disposition de ses jo in ts , il ressemble plus à un anim al quadrupède q u ’à un insecte.
14 C H A P IT R E 2. R O B O T S M A R C H E U R S
Il y a un to ta l de qua tre D D L par jam be. Deux m oteurs sont situés au niveau de la hanche et relient le corps au fém ur, un a utre est au niveau du genou connectant le fém ur et le tib ia , et le dernier relie le tib ia au pied. Le prem ier jo in t fie la hanche est. responsable du mouvem ent avant-arrière de la jam be. Le deuxième D D L de la hanche tra va ille avec le jo in t à la cheville pour contrôler l ’extension du robot vers la gauche ou la droite. C ette p a rtic u la rité aide le ro b o t à garder son centre de masse (C d M ) à l ’in té rie u r du polygone de contact à to u t m om ent. Même si la p lu p a rt du poids est à la base du robot , la masse de la jam be ainsi que deux actionneras doivent être déplacé, ce qui peut amener des problèmes de contrôle. Aussi, tous les aetionneurs sont des m oteurs à CC avec un réducteur, ce q ui augmente l ’in e rtie mécanique du système. Une caractéristique intéressante de Guarâ est son habileté à détecter le sol ou des obstacles. Grâce à deux paires d 'in te rru p te u rs situés sur le pied, une à l ’avant, et l ’autre à l ’arrière (vo ir figure 2.12), le robot est en mesure de d éterm iner quel type d ’obstacles obstrue son chemin en lisant les différentes combinaisons des in terru pte urs. Par contre, G uarâ n'a aucune com pliance, donc un contact indésirable, n ’im p o rte où sur le robot à l'exception du pied, peut endom mager le robot ou son environnem ent.
2.7. D L R - C R A W L E R 15
Figure 2.12 Pied et. les in te rru p te u rs sur le robot G uarâ [12]
2.7
DLR-Crawler
Le D L R -C ra w le r [1, 15 17], m ontré à la figure 2.13, est un marcheur hexapode qui présente de nombreuses am éliorations. Il a été c o n stru it à l'a id e de pièces provenant d ’autres projets des laboratoires du D L R , le Centre Aérospatiale de l ’Allemagne. Plus spécifiquement-, les doigts de la m ain D LR I I [35] lu i servent de jambes. Chaque jambe contient quatre jo in ts mais seulement tro is D D L , le quatrièm e jo in t étant relié via des câbles au troisièm e. Il est intéressant de constater comment- un doigt peut fo u rn ir la m o b ilité et l'espace de tra va il requis par une jam be. Le D L R -C ra w le r ut ilise un couplage diffé re n tiel à la base de sa jam be pour (Unix de ses tro is D D L . De cette manière, la m a jo rité du poids se retrouve1 à la base du robot. De; plus, les deux moteurs peuvent être combinés de manière à ce que1 chacun de leur couple sent, ajeuité élans l ’un em l'a u tre eles axes du différentiel. Chacun eles me>teurs de la jambe1 est couplé à un réducteur harm onique afin ele fo u rn ir le couple nécessaire. Aussi, de; la même m anière que Le;mur Ilb , chacun des jo in ts est équipé d ’un capteur de couple1, en plus el’un capteur à six D D L logé élans son pied. La prin cip ale différence est que le robot élu D L R utilise; cette in fo rm a tio n ele manière à co ntrô le r activem ent, en impédance et aussi en com pliance, chacun ele; ses actionneurs. Ceci donne au robot la capacité ele marcher sécuritairem ent dans tous les environnem ents. De plus, comme la com pliance est- réalisée1 au niveau de chaque jo in t, les collisions sont donc détectées de manière sim ilaire. C ’est- une elifféience avec les autres marcheurs où une collision non supervisée peut résulter en de sérieux dommages au système mécanique. En outre, à cause de sa com pliance, il peut u tilis e r le même modèle de marche sur un te rra in p la t ou du gravier. Ceci dém ontre do quelle manière la compliance peut am éliorer la fle x ib ilité d ’une plateform e robotique. Aussi, avec une charge de 3 kg, le D L R -C ra w le r peut m archer à une vitesse de 20 cm /s, ce qui représente presqu’une longueur de ro b ot par seconde.
M algré ces avantages, le D L R -C ra w le r présente certains inconvénients. Pour a tte in d re ces performances, les boucles de contrôle doivent opérer à 1 kHz, ce qui nécessite de grandes
1G C H A P IT R E 2. R O B O T S M A R C H E U R S
Figure 2.13 R obot D L R -C ra w le r 6
ressources de calculs. Présentement, ce n ’est pas un problème im p o rta n t car tous les calculs sont faits par un o rd in a te u r qui n ’est, pas sur le robot. C ette co nfiguration nécessite un raccordement filé qui fixe le cham p d ’action du robot à 10 m. Aussi, la com pliance est seulement fonctionnelle lorsque les boudes de contrôle sont en fonction, donc en cas de panne le système n ’est pas en mesure d ’absorber les chocs mécaniquement.
2.8
Robots quadrupèdes de l’ETH
Le laboratoire de robotique' de l ’E T H , l'É cole Polytechnique Fédérale' à Zurie'h. a iéeem- me'nt développé différentes platefenmes à pattes en u tilis a tio n [20, 21] des actionneuirs sériel élastique (A S E). Un actionnemr sériel élastique est un type d ’aetionneur cermpilant [51] epii offre; une p rotection inécaniejue intrinsèque aux chocs en plaçant un élément élastique (un resse>rt) en série entre un m oteur et la stru cture . En mesurant la déform ation du ressort il est alors possible de réguler dynam iquem ent l ’impédance de l ’aetionneur [18, 19, 39]. Le ro b ot S ta rlE T H [20], m ontré à la figure; 2.14, est une plateform e ejuaelrupèele avec trois D D L élans e,Lacune eles pattes (eléveloppées sous le nom ele p ro jet S carlE T H [21]) e't ex- p lo ita n t eles ASE. Des capteurs de force résistifs (force sensing rcsi.st.ors) sont utilisés penir elétecter les changements dans la force de contact avec le sol. Le ro b ot A L o fF [43] est aussi une plateform e ejuadrupèele; avec tro is D D L par patte mais avec des actionneurs rigieles toutefois. Un différentiel mécaniejue est u tilis é pour la fle x io n /l’extension ele la hanche; et penir l ’a b d u c tio n /l’aeleluction de; la hane;he. E nfin , une version préalable ele ees deux pla- tefonnes im plique l ’usage; el’ASE ave;e un elifférentiel mécanique [22] et des pattes munies ele; b o u t à ressort.
2.9. S O M M A IR E 17
Figure 2.14 Robots S ta rlE T H (à gauche) et A L o F (à d ro ite ) '
2.9
Sommaire
Le tableau 2.1 résume les caractéristiques des différentes jam bes robotiques présentées. Il en découle que les plateformes existantes sont équipées soit d ’un système pour détecter le sol, soit d ’un système pour mesurer la force appliquée au sol, mais pas les (Unix. La seule exception est le D L R -C raw ler. Aussi, ils u tilis e n t tous des mot (nus équipés d ’un ré d ucte ur p ou r leur jam be, avec un D D L par jo in t dans chaque jam be. Une fois de plus, la seule exception est le D L R -C raw ler. L ’u tilis a tio n du diffé re n tiel mécanique p our com biner le couple do deux m oteurs sur le D L R -C ra w le r et les robots quadrupèdes de l ’E T H est aussi une idée intéressante. En contrepartie, le D L R -C ra w le r n ’u tilis e pas d ’aetionneurs élastiques contrôlés en impédance, et il serait intéressant d ’étu d ie r com m ent ces aetion- neurs peuvent, être utilisés pour fo u rn ir une com pliance intrinsèque et un contrôle en force aux robots marcheurs. L ’e x p lo ita tio n des ASE et du d iffé re n tie l mécanique dans certains robots quadrupèdes de l ’E T H dém ontre l ’in té rê t d ’une telle configuration, sans toutefois présenter d ’analyse détaillée de celle-ci. C ’est ce qui est tra ité dans le ch ap itre 3.
18 C H A P IT R E 2. R O B O T S M A R C H E U R S
Tableau 2.1 Résumé des différentes options de jam bes sur les robots marcheurs statiques Type' ele> ja m b e D D L / Joint. N om bre de liens R é d u cte u r D é te ction du sol M esure de la force T y p e de' eont.iôle
Hainlct. Insoctefiele J /d 2 O ui Non
J D D L basés s u r les jauges
de co n tra in te s
Peisition
A S T K R IS K Sur mesure 4 /4 5 O u i In te rru p te u r
O n /o ff A ucu n P osition S C O R P IO N Insertoïde' d /d 2 O u i Jam be à ressort, 11) p o te n tio m è tre F o ire le' lemg ele> l'axe' me'suré
L e in u r lia S ur mesure J / J 2 O ui Non Noue Pe isit ion
Lemnir 11!> S ur m osurc 4 /4 2 O u i Non
O u i, m ais non im p lém e ntée Pe>sit iem A n to n Insertoïde' J / J 2 O u i Non J D D L basés su r une ja ug e de co n tra in te s Contrôle' ele' feerer de'
1 ia.se' O u a ta S ur UK'.snn' 4 /4 2 O u i P lusieurs in te rru p teu rs de con tact Non P osition D L R -C ra w le r Deiigt J /4 J O ui C o n trô le de com pliance G D D L basés s u r les jauges de cont ra in te s ; M esure de cou ple à tous
les jo in ts Com pliane e et im p é d a n e r Robot, s (jtta d ru - pèeleis de l ’ H T II S ur mesuret J / J 2 O ui C o n trô le de com pliance, Force de contact,, Jam be à ressort, Mesure' de- couple' à tous les jo in ts ; C a p te u rs ele fo ir e résistifs C o m p lia n e r et, impéelanec
CHAPITRE 3
Utilisation d’un différentiel mécanique pour dou
bler le couple d’actionneurs différentiel élastique
d’une articulation robotique compliante
A uteurs e t affiliation :
M .
Tanguay : Etudiant
à la m aîtrise, U niversité deSherbrooke,
Facultéde
génie,Dépar
tement- de génie électrique et de génie inform atique.
D. Létourneau : Professionnel de recherche, laboratoire de robotique intelligente, interac tive,
intégrée et interdisciplinaire
(In tR o L a b ), U niversité de Sherbrooke, Faculté de génie. Départem ent de génie électrique et de génie inform a tiqu eF. M ichaud : Professeur et d irecteur du la b ora to ire de robotique intelligente’ , in teractive , intégrée' e't interdiseûplinaire (In tR o L a b ), U niversité de Sherbroeeke, Faeulté de' génie, Dé- parréme’n t ele' génie’ éle>e:triejue et de génie informaticien’
E ta t de l’accep ta tio n
: Soumis le 14 a v ril 2013.T itre anglais :
Using a Diffe.rc.ntial Drive Mechnnism to Double the Torque o f D ifferentialFAastic Ac.tuat.ors of a Compilant, Legged Robot
T itre français
: U tilis a tio n d ’un diffé re n tiel mécanique p our doubler le couple d ’action- nemrs différentiel élastique d ’une jam be robotique com plianteR evu e
: R obotics Society o f Japan Advanced RoboticsC ontrib ution du d ocu m en t
: L ’a rtic le présente le système développé dans le cadre dutra v a il ele m aîtrise, composé de deux actionneurs
différentiel élastique et
d ’un d iffé re n tiel mécanique, dans le b u t de les e xploite r dans la réalisation d ’une a rtic u la tio n ro b otiq u ecompilante.
La caractérisation du mécanisme en terme de couple et de vitesse y estétudiée.
R é s u m é fra n ç a is : Les actionneurs élastiques peuvent amener d ’im p o rta n ts bénéfices aux robots marcheurs ejui doivent évoluer en te rra in irrégulier. A fin de m inim iser Us dim en sions cet. le poids de' la jam be to u t en m axim isant le couple et la vite'sse, e-et article’ présente l ’u tilis a tio n de deux actionneurs différentiels élastiques (A D E ) couplés à 1111 elifférentiel
C H A P IT R E 3. U T IL IS A T IO N D ’U N D IF F É R E N T IE L M É C A N IQ U E P O U R
20 D O U B L E R L E C O U P L E D ’A C T IO N N E U R S D IF F É R E N T IE L É L A S T IQ U E
oanic|ue perm ettant l'a b d u c tio n /l'a d d u c tio n et la flexion/T extension d ’une jam be de robot. L ’e xplicatio n des actionneurs et, du mécanisme de couplage est présentée, accompagnée de la caractérisation du système résultant.
3.1
Abstract
Elastie aetuators can b rin g im p o rta n t benefits for legged robots lia vin g to operate on irreg u la r terrain. To m in im ize leg size and w eight w hile m a xim izin g torque and velocity, tin s pap('r présents tlie use o f two d iffe re n tial elastie aetuators (D E A ) coupled throu g h a d iffe re n tia l d rive ineehanism to provide a b d u c tio n /a d d u c tio n and flexion/extension o f a robot leg. E xplanations o f the D E A and tlie mechanism are provided, along w ith its charaeterizaticm.
3.2
Introduction
D e s ig n a n d c o n t r o l o f lc'gge'd r o b o t s c a p a b l e o f o ] ) e r a t i n g o n i r r e g u l a r t e r r a i n b r i n g s i n
terest ing chall<‘ng('s [34] [8], one o f which being tlia t the legs m ust liave tlie c a p a b ilitv o f dealing wit.li large forces over short periods o f tim e, as tlie y makc contact w ith the ground [2]. T h e conventional design approach consists o f using s tiff m otors pow erful enough to deal wit.h tliese forces, and measure contact or forces between the leg and the environm ent.
h b r instane e-, using geared D C motors, legs use contact switches [49] [12], spring loadeel shanks w ith a poteuitiom eter [48] or three degrees o f freedoin (D O F ) stra in gatigc's [ i l ] [28] to di'te'e:t eontact or measure forces applied o r com ing from the grounel. Tem jue/fbrce semsors plae exl w ith in jo in ts [27] [3] can also be useel. One exam ple is the D L R -C ra w le r [1G], w hich use's geared D C m otors, torque measurement at, eacli jo in t, anel 6 -D O F stra in gauge1 at the tip e»f the leg for impédance co ntro l at 1 kHz.
However, the use o f s tiff m otors lim its the a b ility o f these leggeel robots to handle u nanti- cipatoei shocks o r interactions w ith the w orld. A n o th e r approach involves using an elastie com ponent to provide passive (i.e., a spring) or active m echanical com pliance to the leg. For instance, R hex’s legs [47] are made o f a curve plastic band w hich acts as a spring tlia t dc'forms when the leg touches the ground. T h e leg is actuated bv a geared m o to r a tta cher! to one end o f the plastic band. T his b u ilt-in passive com pliance enables the ro b o t to move 011 a great va rie tv o f uneven terrains. For active com pliance, Serial Elastie A etuators
(S E A ) are- compilant, aetuators capable o f e q u ilib riu m controlled stiffness [51], offering in- trin s ic niechanie'al security to shocks. B y measuring the deform ation o f the spring using
.12. IN T R O D U C T IO N 21
stra in jauges and H ooke’s law, impédance control [18. 19, 39], i.e., the a b ility to dynam i- cally regulate stiffness throu g h torque control of the actuator, is possible. T he m axim um stiffness is sert by a spring tlia t acts as the elastie component. S EA have been tised on S pring Turkey [40], S pring Flam ingo [41] and M2 [44] two-legged robots, dem onstrating t liat tlie y can liandle external forces (sucli as being pushed around). S im ulation o f using variabh* impédance co ntro l m ethod for quadruped robot tro t lias been dem onstrated in [38]), showing b o tte r perform ance and s ta b ility tlia n tixed impédance co ntro l in tro ttin g on irreg u la r terrain.
One issue w ith SEA is tlia t having to place the elastie component in sériés w ith tlie ac tu a to r makes it more d iffic u lt to place in sm all volumes. Instead o f using serial eoupling as in SEA, D iffe re n tia l Elastie A etuators (D E A ) [29. 31] use a d iffe re n tia l eoupling bet- wceii a high impédance mechanical speed source and a low impédance meehanical spring. D E A show s im ila r com ]iliance capabilities to SEA, but w ith higher torque/encum brance ra tio , lower ro ta tiv e in e rtia , lower ro ta tio n ve lo city o f tlie flexible element, and im proved e ffort transm ission through tlie m o to r’s châssis. D E A have been used to design co m p lia nt locom otion or m a n i])u la tio n [10] mechanisms but not for legged robots, w liile SEA lias récent lv been used in quadruped robots [20, 22]. Legged robot design involves m in im iz in g leg size and w e ig lit w liile m a xim izin g torque' and velocity. In tliis p ro ject, our interest lies in stu d vin g how D E A ’s advantages can be used in the design o f com pliant quadrupède robot. For instance, D E A ’s sm aller form factor comparer! to SEA allows the aetuators to be placée! on the p la tfo rm ra th e r than on tlie leg. However, using one D E A for eaeh D O F lia n ts the torque capabilities o f eaeh leg to the ones provided by the actuator. Consi- (k’rin g tlia t D E A can be placer! close to eaeh o ther to actuate a 2-D O F h ip jo in t (one for a b d u c tio n /a d d u c tio n movement, and one for flexion/extension m oveinent), increasing torque capabilities can be accomplished by eoupling the D E A throu g h a differential d rive (D D ) mechanism, sucli as in [1G, 43]. A sim ila r mechanism using S EA is presented in [22], w ith o u t characterizing its performances. T liis paper therefore présents the designer! me- chanism using D E A and the resulting performances in terms o f torque m agnitude, torque b an d w id th, current versus torque and velocity versus torque, and is organized as follows. Section 3.3 explains the w orking principles o f a D E A along w ith its design for our legged p la tfo rm . Section 3.4 describes the 2-D O F DD -eoupled D E A design and its controller, followed bv Section 3.5 w ith results obtained using a real im plém entation o f the designer! mechanism.
C H A P IT R E 3. U T IL IS A T IO N D 'U N D IF F E R E N T IE L M E C A N IQ U E P O U R 22 D O U B L E R L E C O U P L E D ‘A C T IO N N E U R S D IF F É R E N T IE L É L A S T IQ U E
3.3
Differential Elastie Actuator for Our Compliant Leg
ged Robot
Figure 3.1 illustrâtes» the w orking prineiples o f a D E A . To générale a desired torque eom- inand r , t l i e e rror vrr between the r,/,.s and the ineasured torque r „ „ .s. is used by a P ID eontroller to d rive a D C m otor. T liis générât es an o n tp u t tore pie Tm m on the load. D E A ’s
elastie element, i.e., a spring w ith constant k s. is loeated at one o f the tlire e p orts o f the gearbox (ra llie r tlia n in sériés between the gearbox and tlie load as for S EA ). Instead of having tlie frame o f the gearbox fixed to tlie aetuator s châssis, it is free to ro ta te and it is attaehed to the out.put o f the a ctuator. A torque sensor is loeated between one end o f the spring and tlie frame o f tlie actuator. It is used to measure the torque o u tp u t o f the a ctuator. T he a ctu a tor also uses a position sensor (e.g., an o p tica l eneoder) to measure
()„„,» for position m o n ito rin g o f the load port.
ûincs Oies T>1T) e n 1
o
'■mesI Elcctrical
|
l orque SensorT
i I X ’ M o to r Position SensorMechanical
F igure 3.1 D E A ’s block diagram .
‘•coin
Load
Figure 3.2 illu s trâ te s the im plé m e n ta tio n o f the D E A a c tu a to r used on o ur legged p la tfo rm . In tliis im p lé m e n ta tio n, a planetary gearbox is used instead o f an harm onie d rive (as in [29, 31]) to provide speed réduction at a lower cost. For our p la tfo rm , we evaluated tlia t the torque required bv eaeh a c tu a to r to be ± 8 N ui, and tlia t tlie p la tfo rm w ould be powered at 24 V . S pring constant fc., was set to optim ize torque b a n d w id th and the mechanical impédance : inereasing k„ means hig lie r b a n d w id th b u t higher mechanical impédance.
3.4. D I F F E R E N T I A L D R IV E C O U P L IN G O F TYVO D E A 23
T h e theoretical e u to ff frequencv /,. is caleulated using (3.1), w ith m p being the in e rtia o f t.lit' planet, gears, m,s the in e rtia o f the. sun gear. and iVy is the réduction ra tio gearbox [31]. S etting k„ to Ire 257 N /m and N fl to b(' 437. f r is at G.7 Hz, w liieh is acceptable for our p rototype. In order to eonunand th<’ D E A correct ly a P II) co n tro lle r was im pleinented.
fr = 2t t
\
( \/2 + 2 )k'„ ( v/ 2 + 2 )m }, + \/2 N * m li (3.1)Gearbox
D C M o to r Sprocket Torque Sensor Figure 3.2 D E A 's schematics.3.4
Differential Drive Coupling of two DEA
A d iffe re n tial d rive (D D ) is four port mechanism w ith tw o in p u ts and tw o o utp uts, as shown by Fig. 3.3. In p u t perrts are r i rom and T2cum for torcpie commands applied bv the first,
and second aetuators, respeetively. Tln'se tw o p orts are eaeh conneeted to a D E A . M o tio n is tra n s m itte d v ia bevel gears. The o u tp u t p o rt 6r (th e position o f the flexion/extcinsion axis) rotâtes wlnm r lrom and r2com are in opposite d ire ctio n , w liile 0e (the p osition o f the a b d u c tio n /a d d u c tio n axis) changes w lien T \ com and T 2rorn ro ta te in the saine d ire ction . The
leg its e lf is attached to the shaft along tlie 6r axis o f the differential.
Figure 3.4 represents the iinpedance control diagram o f the 2 -D O F D D -coupled D E A leg mechanism. It, uses six in p uts : tlie desired impédance for the a b d u c tio n /a d d u c tio n axis
C H A P IT R E 3. U T IL IS A T IO N D ’ U N D IF F É R E N T IE L M É C A N IQ U E P O U R 24 D O U B L E R L E C O U P L E D ’A C T IO N N E U R S D IF F É R E N T IE L É L A S T IQ U E
coin
^ I corn
Figure 3.3 D iffe re ntia l d rive mechanism w ith the différent D O F : Isom etric view (to p ) ; Front view (m idd le ) ; R ight view (l)o tto m ).
values for the p osition (#,-,./) and velocity (#,<■/) f° r eaeh D O F. A il thèse values are sent to the 2 -D O F DD -eoupled D E A by a higher level control system. B oth Z jcs term s inelude the desired spring constant (kx), dam ping ra tio (kw) and the offset torque (T0//.,f f ). For the developed mechanism, kx is set to 15 N /m , kn, is set to 0.5 N s /m and r 0/ / set is set to 0. The impédance fon ctio n f(Z ,tc s ,9 mc.s) is given bv (3.2) and is used to dérivé the desired torque oommands ( r ldes and r 2(ies) for the tw o D E A , w hich activate tlie d iffe re n tia l d rive mechanism by p ro vid in g r lcom and r 2rom based on 0 lrni,, and 02mps.
3.4. D IF F E R E N T I A L D R IV E C O U P L IN G O F T W O D E A 25
- 7"irfr_ is derived by ta k in g the sum (silice both aetuators tu rn in the sainte dire ction ) o f the desired torque for the leg’s a b d u c tio n /a d d u c tio n and the desired torque for the leg’s fle xio n/e xte n sio n Trdft, d ivided bv tw o ;
- T2iirK is derived by ta k in g the différence (since both aetuators tu rn in opposite direc
tio n ) o f the desired torque for the leg’s a b d u c tio n /a d d u c tio n and the desired torque for the leg’s fle xio n/e xte n sio n r , iJ( , d ivid e d by tw o ;
- 6emrs is derived by ta k in g the différence o f first a ctu a tor measured position 6 lmr% and
the measured p osition for the second a ctu a to r 02mr, > d ivided by tw o :
- 0Tmrh is derived by ta k in g the sum o f the first a c tu a to r measured p o sition and
the measured p osition for the second a ctu a to r 02„u ., d ivided by two.
r e f des r des des des • r t f
Figure 3.4 Impédance control diagram o f the 2-D O F D D -coupled D E A leg mechanism.
Figure 3.5 shows the im p lé m e n ta tio n o f the 2-D O F DD -coupled D E A leg mechanism on a four-legged p la tfo rm . E acli leg is identical and Table 3.1 summarizes its phvsical characteristics. To accommodate fo r th e ir shape, D E A are linkecl to the D D through a tim in g b e lt and a p ulley system. A ccording to [6], it is désirable to keep the o u tp u t in e rtia as low as possible in order to im prove the impédance control qualities. S ta rtin g frorn the g uidin g p rin c ip le th a t the o u tp u t in e rtia J is p ro p o rtio n a l to the square o f the réduction ra tio [45], considering N p p the réduction ra tio o f the D D and N g the réduction ra tio o f the b elt system, J a (N f)ü * Nq). To ensure a low o u tp u t in e rtia , we decided to have Ari)D = Ar/i = 1 ; 1 :1 ra tio for both réduction stages.
C H A P IT R E 3. U T IL IS A T IO N D ’U N D I F F E R E N T I E L M E C A N IQ U E P O U R 26 D O U B L E R L E C O U P L E D ’ A C T IO N N E U R S D IF F É R E N T IE L É L A S T IQ U E
Differential
Drive
Figure 3.5 Four-legged robot p la tfo rm using fou r 2-D O F D D -coupled D E A legs Table 3.1 Physieal characteristics o f a 2-D O F DD -coupled D E A leg
P r o p e r t y V a lu e D im ension (m m )
Length 605 W id th 408 H eiglit 300 Leg D iam eter 21 W eight (kg)
One D E A 1.5 D iffe re n tia l D rive 1.5 Leg 0.17 T o tal 4.67
T he use o f bevel gears in tlie D D mechanism lias one m ain draw back : backlash. T liis can be redueed to a m in im u m by carefullv a d ju s tin g the distance o f eaeh gear w ith respect to the intersection p o in t o f the axis o f flexion/extension.
3.5
Expérimental Results
T he experim ents we conducted examines if the 2-D O F D D -coupled D E A mechanism ('an double the a m p litu d e o f the torque capabilities o f eaeh D E A w liile s till preserve torque
3.5. E X P E R IM E N T A L R E S U L T S 27
b a n d w id th , précision (affected by backlash in the bevel gears), rang(' o f m otion and réaction tim e.
3.5.1
Torque Magnitude
For tliis experim ent, tw o cases were exam ined by settin g the follo w in g setpoints : 1) 0(, = 90°, 0r = 0°, and 2) 0,, — 0°, 0r — 90°. These tw o situ atio n s correspond to the highest torqu e requirem ent for eaeh D O F . In b o th cases, weights were suspended at the end o f a leg, the torques developed by eaeh a c tu a to r were measured, and 0r = D E A \+ D E A -i and 0r
— D E A \-D E A -i were calculated. Figure 3.6 présents tlie résulta and confirm a tlia t torque
m agnitude o f the 2-D O F D D-coupled D E A leg mechanism combines well the torques from eaeh D E A , b o th in a b d u c tio n /a d d u c tio n and in flexion/extension. T he b o tto m g ra p li o f F igure 3.6 shows the tw o D O F along w ith the tlie o re tica l m odel o f tlie D D (3.3, 3.4). T he tlie o re tica l model is tlie line w liere the exerted torque w ould be exactly equal to measured one if both D E A \ and D E A 2 were idéal. D éviation o f b o th B,, and 9r from the tlie o re tic a l model is abolit, 3%, and tliis is eaused bv the flexion o f tlie base o f the leg.
TnEA, + T„/,;a2
TV = --- (3.3)
Tdi-;a, - T,),.;a
T r = --- (3.4)
3.5.2
Torque Bandwidth
T h e experim ent conducted consists o f fixin g , using a c-clamp, tlie o u tp u t o f e itlie r one D E A (i.e., its sproeket Trorn) or tlie 2 -D O F D D -coupled D E A mechanism to tlie ground, as sliown in Fig. 3.7, and measure t co1„ (fo r tlie D E A ) o r t c and ry (fo r tlie D D ). M o to r
velocity was set to its m axim um (20 R P M ) to m in im ize response tim e o f tlie aetuators to the diffé re n t eommands, and a sinusoidal torqu e com m and from 0.1 to 7 Hz (incrém ent 0.1 Hz) was given as in p u t. T he 7 Hz upper lir n it was set to prevent damages because beyond tlia t p o in t, the flexible élément changes d ire ctio n too fast and large forces are exerted on the mechanical system. Com m and am plitudes were set to 6, 10 and 12 Nm. Below 6 N m , torque eommands were too small in re la tio n to k s and the a c tu a to r d id not move. 12 N m was set w ith a sm all buffer to the tlie o re tic a l lim it (16 N m ), to prevent dam aging the system.
![Figure 2.1 R obot H am let [11]](https://thumb-eu.123doks.com/thumbv2/123doknet/5516188.131672/17.918.279.648.550.874/figure-r-obot-h-am-let.webp)
![Figure 2.2 D D L d ’un des jam bes de H am let [11]](https://thumb-eu.123doks.com/thumbv2/123doknet/5516188.131672/18.938.311.579.533.790/figure-d-d-l-des-jam-bes-let.webp)
![Figure 2.3 R obot A sterisk [13]](https://thumb-eu.123doks.com/thumbv2/123doknet/5516188.131672/19.918.297.631.309.596/figure-r-obot-a-sterisk.webp)

![Figure 2.11 R obot G uarâ [12]](https://thumb-eu.123doks.com/thumbv2/123doknet/5516188.131672/26.929.241.642.652.955/figure-r-obot-g-uarâ.webp)
![Figure 2.12 Pied et. les in te rru p te u rs sur le robot G uarâ [12]](https://thumb-eu.123doks.com/thumbv2/123doknet/5516188.131672/27.918.363.558.108.257/figure-pied-et-les-rru-sur-robot-uarâ.webp)