HAL Id: tel-01806296
https://tel.archives-ouvertes.fr/tel-01806296
Submitted on 1 Jun 2018HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Caractérisation et optimisation d’une batterie
électromécanique sous chargement cyclique
Corentin Kerzreho
To cite this version:
Corentin Kerzreho. Caractérisation et optimisation d’une batterie électromécanique sous chargement cyclique. Mécanique des structures [physics.class-ph]. Ecole Normale Supérieure de Cachan, 2002. Français. �tel-01806296�
T
HÈSE DE
D
OCTORAT DE L
'E.N.S. C
ACHAN
Spécialité :
M
ÉCANIQUE DESS
OLIDES ET DESS
TRUCTURESprésentée à
l'E.N.S. Cachan - Antenne de Bretagne
par
Corentin KERZREHO
pour obtenir le grade de :
D
OCTEUR DE L'E.N.S. C
ACHANTitre de la thèse :
C
ARACTÉRISATION ET OPTIMISATION D
'
UNE BATTERIE
ÉLECTROMÉCANIQUE SOUS CHARGEMENT CYCLIQUE
Soutenue le 8 janvier 2002 devant le jury composé de :
Monsieur
G. TOUZOT
Président
Monsieur
P. CHEDMAIL
Rapporteur
Monsieur
J. GUILLOT
Rapporteur
Monsieur
J.Y. COGNARD
Examinateur
Monsieur
D. MARQUIS
Examinateur
Monsieur
B. MULTON
Examinateur
LABORATOIRE DE MÉCANIQUE ET TECHNOLOGIE
E.N.S. Cachan / C.N.R.S./Université Paris 6
61 Avenue du Président Wilson – 94235 Cachan Cedex (France)
DÉPARTEMENT DE MÉCATRONIQUE
E.N.S. Cachan – Antenne de Bretagne
Campus de Ker Lann - 35170 Bruz (France)
Mes plus sincères remerciements vont, en premier lieu, aux Professeurs Jean-Yves COGNARD et Bernard MULTON pour m'avoir permis d'effectuer ce travail et m'avoir ainsi fait confiance. Le professeur Jean-Yves COGNARD, en acceptant de diriger mes travaux sur une thématique commune avec celle des électrotechniciens, a pris un engagement sur lequel j'ai toujours pu m'appuyer et dont je le lui suis redevable. Avec beaucoup de disponibilité, il m'a accompagné et a su pousser mes raisonnements vers un maximum de rigueur. Le Professeur MULTON, de part la passion communicative qui l'anime, ses qualités humaines et scientifiques, restera pour moi un modèle… que sa modestie saura tourner en dérision.
Merci aux Professeurs Jean GUILLOT et Patrick CHEDMAIL pour avoir bien voulu être les rapporteurs de ce travail et de ce document, au Professeur Gilbert TOUZOT, pour avoir présidé le jury de thèse et au Professeur Didier MARQUIS, examinateur du jury, qui, il y a quelques années, m'a proposé de participer à la création de l'Antenne de Bretagne de l'École Normale Supérieure de Cachan. J'y suis resté 5 ans, m'intégrant finalement dans l'axe de recherche sur les énergies renouvelables pour préparer ce doctorat.
Merci au Professeur Michel NUSIMOVICI, Directeur de l'Antenne de Bretagne de l'ENS de Cachan, pour son soutien et sa compréhension.
Je tiens aussi à remercier l'ensemble des participants au projet avec qui j'ai eu énormément de plaisir à travailler, en particulier, Hamid BEN AHMED et Nicolas BERNARD, pour leurs compétences et leur disponibilité, mais aussi Jérôme DELAMARE et Fabien FAURE du Laboratoire d'Electrotechnique de Grenoble, François HILD, Georges DUMONT et Jean DUVAL, pour leur accompagnement en début de projet.
À l'Antenne de Bretagne de l'ENS Cachan, en plus de l'opportunité de réaliser ces travaux, j'ai trouvé, parmi mes collègues et le personnel, des amis que je tiens à saluer.
Merci aussi, pour leur compréhension, aux enseignants du département de mécanique de l'INSA de Rouen, que j'ai rejoint en septembre 1999, en particulier, à Philippe MARIN, son directeur de juin 1998 à juin 2001.
À mes parents, ma famille et ma belle famille,
À mon épouse, pour son soutien, sa patience et mille raisons indépendantes de ce travail, À mes enfants,
Page 5
Sommaire
SOMMAIRE 5
PRINCIPALES NOTATIONS 8
PRÉSENTATION 13
CHAPITRE 1 : LES BATTERIES ÉLECTROMÉCANIQUES 15
I. Principes et constituants...16 I.A. Batterie électromécanique 16
I.B. Les composants 17
I.C. Les principales caractéristiques 18 II. Applications ...23 II.A. La fourniture de courant régulé 23 II.B. Les autres applications 25
II.C. Comparatif 28
III. Technologies des constituants...29
III.A. Le volant 29
III.B. Le moteur-générateur 40
III.C. Les paliers 41
III.D. Les éléments de sécurité 44 IV. Structures et intégration ...48 V. Conclusion ...51
CHAPITRE 2 : FAMILLES DE VOLANTS ET DIMENSIONNEMENT 53
I. Définition et propriétés des familles de volants...54 I.A. Exemple : les volants cylindriques 54
I.B. Définitions 59
I.C. Propriétés des familles de volants 60 I.D. Propriétés dans le domaine élastique linéaire 67 II. Vitesse maximale, capacités énergétiques ...71 II.A. Coefficient de contrainte et vitesse maximale en limite d'élasticité 71 II.B. Coefficients énergétiques du volant 76
Page 6
II.C. Dimensionnement en limite d'endurance 82
CHAPITRE 3 : CARACTÉRISATION DES VOLANTS 91
I. Réalisations en matériaux métalliques... 92 I.A. Caractéristiques des différentes géométries en limite élastique 92 I.B. Surfaces de Pareto et domaines de solutions 104 II. Réalisations en matériaux céramiques... 112 II.A. Dimensionnement des céramiques 112 II.B. Application aux volants 115 III. Réalisations en matériaux composites ... 119 III.A. Matériaux de référence 119 III.B. Anneaux de section constante 122 III.C. Amélioration par remplissage et domaines de solutions 134 IV. Bilan métaux et composites ... 141 IV.A. Caractéristiques énergétiques 141
IV.B. Estimation du prix 143
V. Puissance extractible... 147
CHAPITRE 4 : BATTERIES DE RÉGULATION 153
I. Caractéristiques énergétiques ... 155 I.A. Applications et cahier des charges d'un module 155 I.B. Rendements, pertes et énergie cinétique maximale 157 II. Prédimensionnement des composants ... 161
II.A. Le volant 161
II.B. Le convertisseur électromagnétique 163
II.C. Les paliers 170
II.D. Éléments complémentaires 173 III. Structure et performances ... 179 III.A. Structure de la batterie 179 III.B. Caractérisation électromécanique en puissance 181 III.C. Prédimensionnement en puissance et énergie, sous contrainte d'inertie 190 IV. Optimisation géométrique du convertisseur ... 197
IV.A. Optimisations 2D 199
Page 7
IV.C. Optimisations 3D 215
V. Autofrettage rotatif...219 V.A. Caractérisation de l'autofrettage rotatif 219 V.B. Gain sur critère élastique 231 V.C. Modification de la limite d'endurance 236 VI. Prototype d'étude...242
VI.A. Cahier des charges 243
VI.B. Dimensions générales 243 VI.C. Paliers et équilibrage 245
VI.D. Réalisation 246
CONCLUSIONS ET PERSPECTIVES 248
ANNEXES 250
I. Équations 2D...250 II. Volants cylindriques en rotation uniforme : formulaire...251
II.A. Matériaux isotropes 251
II.B. Matériaux orthotropes transverses 254
Page 8
Principales notations
1)
G
ÉOMÉTRIE,
MASSE ET INERTIE, et ∂
V D D volant, domaine de matière et surface externe associés
Vol volume du volant
Venc encombrement du volant : volume du cylindre enveloppe au volant, 2
enc
V =πR H
M masse du volant (ou point du domaine D)
I inertie du volant
R plus grand rayon du volant
Ri rayon intérieur d'un volant creux
H plus grande épaisseur du volant α rapport des rayons, α =R Ri/
αm rapport optimal des rayons pour un volant cylindrique composite (dépend de λ et β)
h élancement du volant, h=H R/
x coordonnée radiale adimensionnée : r =Rx , x∈[ ,1]α Pour le volant de référence
vol volume de matière
3
/
enc enc
v =V R =πh encombrement du volume de référence
5
/( )
ref
i =I ρR inertie adimensionnée de référence
3
/( )
ref
m =M ρR masse adimensionnée de référence
4
/ /( )
s ref ref
i =i h=I ρHR inertie de référence pour les volants de section constante ou de profil proportionnel à H
2
/ /( )
s
ref ref
m =m h=M ρHR idem pour la masse Pour le moteur-générateur
Rc rayon extérieur du moteur générateur αd rayon, relatif à Rc, du fond d'encoche
αa rayon, relatif à Rc, de l'axe
2)
M
ATÉRIAUXE et ν module de Young et coefficient de Poisson des matériaux élastiques linéaires isotropes
E module de Young caractéristique du matériau, tel que l'opérateur de Hooke d'un matériau élastique s'écrive : EΚ (utilisé pour les matériaux composites)
Κ opérateur de Hooke
( )M
Principales notations Page 9 ρ masse volumique caractéristique (généralement la masse volumique maximale)
( )M
µ champ de répartition de masse volumique : ( )ρM =ρ µ( )M
ρ masse volumique moyenne : ρ =M V/ ol Caractéristiques des aciers
Rm résistance à la rupture
Re résistance en limite élastique
σl0 limite d'endurance en traction-compression alternée
b coefficient de modification linéaire de la limite d'endurance (estimé par 1/Rm)
Céramiques
m, V0 et S0 module de Weibull, volume de référence du matériau et contrainte de normalisation
*
e
R contrainte pratique équivalente Composites orthotropes
EL et ET modules élastiques longitudinal et transverse
/ T
L
E E
λ = coefficient d'anisotropie des rigidités
RL et RT résistances à la rupture dans les directions longitudinale et transverse
/ T
L
R R
β = coefficient d'anisotropie des résistances
RLT et RTT résistances au cisaillement dans les plans longitudinal – transverse et transverse –
transverse
3)
C
ONDITIONS DE FONCTIONNEMENTt variable temps
ω et ω vitesse de rotation et accélération angulaire
V et V vitesse périphérique du volant, V =Rω, et sa dérivée par rapport au temps
Pi et Pe pressions intérieure et extérieure, appliquées généralement sur des surfaces de rayon Ri
et R
Vmax et Vmin vitesses périphériques maximale et minimale des cycles de charge et de décharge
r rapport des vitesses de fonctionnement à puissance constante du moteur-générateur :
max/ min
r =V V
ηc rendement du moteur-générateur
pa pertes par autodécharge (en proportion de l'énergie utile)
pg pertes globales de la batterie (en proportion de l'énergie utile)
4)
C
RITÈRES DE DIMENSIONNEMENT ( ) C σ opérateur de Von-Mises ( ) tr C σ opérateur de TrescaPage 10 Principales notations Céramiques
( )M
σ+ et C+( )σ contrainte équivalente et opérateur de Rankine positif σ+ contrainte de Rankine positive maximale
( )
c M+ contrainte de Rankine positive adimensionnée, telle que : σ+( )M =σ+⋅c M+( )
ps et ps0 probabilités de survie d'une pièce et d'un volume de référence du matériau
ps,ref probabilité de survie de référence d'un volant
Hm facteur d'hétérogénéité des contraintes
Veff volume effectif : Veff =H Vm. ol
Composites orthotropes ( ) Max( ,σ βσL T)
⊥ =
C σ opérateur de contrainte longitudinale ou transverse maximale ( )
TH
C σ opérateur de contrainte équivalente de Tsai-Hill
5)
C
ARACTÉRISTIQUES MÉCANIQUES DU VOLANT( , , ) ( ) . . . r r rz z z e e z M θ θ θ σ τ τ σ τ σ = σ , ( , , ) ( ) . . . r r r rz z z e e z M θ θ θ θ ε ε ε ε ε ε = ε , ( , , ) ( ) r r z e e z u u M u u θ θ =
champs et tenseurs de contrainte, de déformation et de déplacement (exprimés dans le repère cylindrique local)
2 ( , , )r r e e z s s V θ ω ω= ωθ =ρ σ
Χ tenseur adimensionné des contraintes liées à la rotation (pour R=1)
R
ω
Χ tenseur adimensionné des contraintes liées à la rotation, pour un volant de rayon R :
( ) ( )
R M M R
ω = ω
Χ Χ
d
σ déviateur des contraintes
( ) ( )
eq M
σ = Cσ contrainte équivalente et opérateur de Von-Mises
2
( ) ( )/
eq eq
s M =σ M ρV contrainte équivalente adimensionnée
kσ coefficient de contrainte du volant, généralement Max ( ( ))
M
kσ = ∈ ω M
D C Χ
1/
V
k = kσ coefficient de vitesse tel que : Ve =kV Re/ρ
s coefficient de pondération lié à la fatigue
6)
C
ARACTÉRISTIQUES ÉNERGÉTIQUESEc énergie cinétique de rotation accumulée dans le rotor : Ec =I ω2/ 2
P puissance délivrée par variation d'énergie cinétique
Ee énergie cinétique en limite élastique (à la vitesse périphérique Ve)
Ve vitesse périphérique en limite d'élasticité, ou limite de rupture pour les matériaux fragiles : 2 1 e e R V kσ ρ =
Principales notations Page 11
K coefficient d'énergie massique en limite élastique : Ee/M =K Re/ρ
Kenc coefficient d'énergie volumique (par unité d'encombrement) en limite élastique :
/
e enc enc e
E V =K R
Es énergie cinétique en limite de fatigue (à la vitesse périphérique Vs)
Vs vitesse périphérique déterminée en fatigue : s2 e
R s V kσ ρ = s K =sK et s enc enc
K =sK : coefficients de forme en limite de fatigue
Eu énergie utile accumulée dans le volant (énergie restituable à puissance constante),
2 2 1 u s r E E r − = 2 2 1 u r s K K r − = et 2 2 1 u s enc enc r K K r −
= coefficients de forme pour l'énergie utile
Introduction Page 13
Introduction
L'enjeu représenté par le stockage d'énergie électrique n'est plus à démontrer. Actuellement, les accumulateurs électrochimiques offrent les meilleures performances en termes d'énergies massique et volumique. Cependant, ces batteries ont deux inconvénients majeurs. Ce sont une durée de vie limitée à quelques milliers de cycles charge/décharge et une puissance spécifique limitée à environ 120W/kg pour les batteries au lithium. Les batteries électromécaniques accumulent l'énergie sous forme d'énergie cinétique dans des volants d'inertie. Elles peuvent s'affranchir des limites en durée de vie des solutions chimiques et, par le choix de matériaux adéquats, offrent une alternative intéressante.
Cette étude, qui regroupe des mécaniciens et des électrotechniciens, s'insère dans un projet pluridisciplinaire soutenu par l'École Normale Supérieure de Cachan dans le cadre des plans pluri-formations. Il a été initié par les Professeurs Bernard MULTON et Jean-Yves COGNARD, du département de Mécatronique de l'Antenne de Bretagne de l'École Normale Supérieure de Cachan, et respectivement membres du LESIR1, équipe Conception d'Actionneurs, et du LMT2. L'objectif est de réaliser un module élémentaire de batterie électromécanique, de quelques kilowatts heures, pour sécuriser et réguler l'approvisionnement en courant d'un foyer ou d'un site isolé. Il est prévu pour s'associer à des moyens de production d'énergie alternative, de type éolienne ou photovoltaïque.
La viabilité du système nécessite une utilisation maximale des possibilités des matériaux constitutifs du rotor et la recherche d'une structure adaptée et optimisée intégrant au mieux l'ensemble des constituants, moteur-générateur et paliers. La conception et le développement du moteur-générateur sont réalisés par l'équipe du LESIR (Bernard MULTON, Hamid BEN AHMED et Nicolas BERNARD, doctorant). Une équipe du Laboratoire d'Électrotechnique de Grenoble travaille sur la définition des paliers magnétiques et leur stabilité. Elle est dirigée par Jérôme DELAMARE, maître de conférences, et a fait l'objet d'un travail de doctorat réalisé par Fabien FAURE. Les études réalisées par les mécaniciens et développées dans ce travail de thèse sont dirigées par le Professeur Jean-Yves COGNARD. Elles concernent la caractérisation mécanique des volants et la détermination de leurs potentialités, le dimensionnement mécanique
1 LESIR : Laboratoire d'électrotechnique, du signal et de robotique 2 LMT : Laboratoire de Mécanique et Technologie
Page 14 Introduction
des composants lors de leur intégration et leur optimisation mécanique. Nous avons aussi défini un prototype de validation du moteur-générateur. Enfin, un interlocuteur industriel, M. DUVAL de la société ATMOSTAT Études et Recherches, a participé à la phase de définition du cahier des charges de la batterie.
Le premier chapitre de ce document présente les différentes technologies des batteries électromécaniques à travers les principaux projets de la littérature.
Dans le chapitre suivant, nous réalisons une étude générale des systèmes en rotation afin d'en déterminer les caractéristiques et de définir des coefficients représentatifs des performances à partir de critères d'endurance. L'objectif est de mettre en place des critères mécaniques, par famille de volants, permettant de comparer les différentes solutions et d'effectuer un choix en fonction du cahier des charges proposé.
Puis, nous effectuons un récapitulatif des possibilités des différentes structures présentes dans la littérature, en définissant des domaines représentatifs des solutions possibles. Nous obtenons ainsi des surfaces de solutions optimales suivant différents critères pour les matériaux métalliques. Après l'étude des réalisations en céramique, nous évaluons les performances des volants en matériaux composites selon un critère de dimensionnement quadratique, de type Tsaï-Hill, conduisant aussi à définir des domaines de solutions. Nous évaluons, ensuite, l'influence des contraintes induites par les phases de transfert d'énergie, accumulation – restitution.
Ces études participent à la définition et au choix de la structure répondant à notre application. Son cahier des charges est précisé, au chapitre 4, et le dimensionnement des composants est réalisé. L'amélioration des performances mécaniques est obtenue par optimisation de la géométrie des pièces tournantes. Ce processus est réalisé en tenant compte, d'une part, de l'intégration du moteur-générateur, développé pour cette application par les électrotechniciens de l'équipe, et, d'autre part, des effets des couplages mécanique -électrotechnique. L'intégration des paliers magnétiques a aussi été étudiée. Nous évaluons, ensuite, les possibilités d'un procédé d'autofrettage rotatif avant de présenter un premier prototype, réalisé pour valider les différentes solutions techniques envisagées.
L'étude proposée permet, à partir de critères mécaniques incluant des couplages électro-mécaniques, de proposer une démarche de conception de batteries à accumulation cinétique pour un cahier des charges donné.
Principes et constituants Page 15
Chapitre 1 :
L
ES BATTERIES
ÉLECTROMÉCANIQUES
Dans ce premier chapitre, nous présentons le principe, les constituants, et les performances des batteries électromécaniques, puis une analyse bibliographique portant sur trois points : les applications utilisant les batteries électromécaniques, les technologies des différents constituants et l'intégration des composants. Nous conclurons en justifiant les besoins d'une analyse mécanique des systèmes tournants et d'une définition des potentialités énergétiques par domaines.
Page 16 Les batteries électromécaniques
I. P
RINCIPES ET CONSTITUANTS
I.A. B
ATTERIE ÉLECTROMÉCANIQUE
Le principe de l'accumulation de l'énergie sous forme cinétique est simple et utilisé depuis longtemps, en particulier pour la régulation de la vitesse de rotation des transmissions de puissance. Elle utilise essentiellement des corps en rotation. L'énergie est accumulée ou restituée en modifiant la vitesse de rotation ω d'un rotor, souvent appelé volant d'inertie. Si Ec est l'énergie
cinétique du volant, I son inertie par rapport à l'axe de rotation et P la puissance transférée, pour un système stationnaire de géométrie constante :
2 1 2 c E = I ω et P dEc I dt ωω = = !
À travers le terme de batterie, nous entendons un système permettant d'accumuler et de restituer l'énergie à la demande. Cette fonction est donc différente de celle d'un volant de régulation de vitesse, même si elle est basée sur le même principe physique.
/ e C k Variateur de vit. continu k e C e ω k ωe Puissance : Mécanique Mécanique 2 2 c I E = ω Volant Batterie i C Embrayage i ω Mécanique
Figure 1-1 : Batterie cinétique (puissances d'entrée et de sortie mécaniques)
e C Electronique de puissance, onduleur... e i e u ωe Puissance : Electrique Mécanique 2 2 c I E = ω Volant Batterie Convertisseur : Moteur / générateur i i i u Alternative ou continue Electrique
Figure 1-2 : Batterie électromécanique (puissances d'entrée et de sortie électriques)
Les différents systèmes se distinguent dans la manière dont l'énergie est transmise à la batterie, en entrée comme en sortie. Considérons un véhicule comprenant un moteur thermique et
Principes et constituants Page 17
un volant d'inertie pour récupérer l'énergie de freinage et la restituer par la suite. La batterie est constituée de ce volant et des composants de commande nécessaires, un variateur de vitesse continu et un embrayage, par exemple, Figure 1-1. Les puissances d'entré et de sortie du dispositif sont mécaniques, c'est à dire, le produit d'un couple par une vitesse de rotation. Dans d'autres cas, Figure 1-2, un moteur-générateur électrique fait partie intégrante du dispositif. L'énergie d'entrée de la batterie est électrique, continue ou alternative, adaptée par une électronique de puissance et de commande, puis convertie par le moteur-générateur en une puissance mécanique. C'est ce système que nous nommons batterie électromécanique, et qui fait l'objet de la présente étude. Sa fonction est en tout point comparable à celle des batteries électrochimiques usuelles. Notons qu'il existe des solutions hybrides, à entrée mécanique et sortie électrique, par exemple.
Dans l'accumulation de l'énergie, nous distinguons la fonction de stockage proprement dite de celle de transfert d'énergie. La première, caractérisée en énergie, se réfère essentiellement au rotor, en particulier au volant. La seconde, caractérisée en puissance, se réfère au convertisseur électromécanique (moteur-générateur) et à son électronique de commande et de puissance.
I.B. L
ES COMPOSANTS
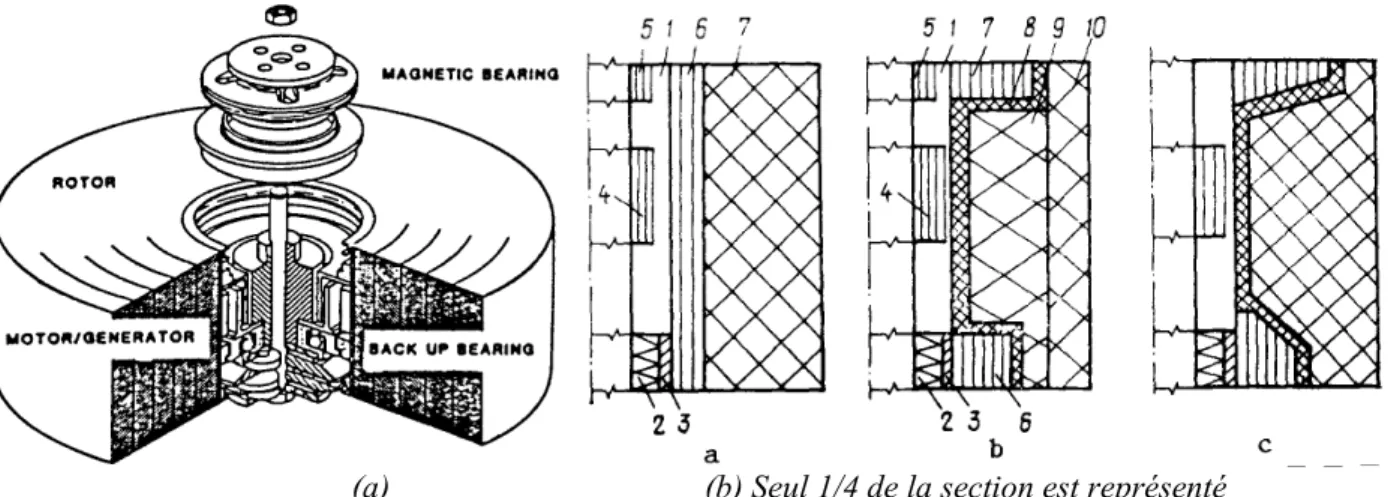
Les principaux composants d'une batterie électromécanique sont schématisés Figure 1-3. Ce sont :
– le volant : élément principal de l'accumulation. Il existe différentes géométries typiques, cylindrique creuse, cylindrique pleine ou de forme "exponentielle". Il peut être réalisé en matériau métallique, composite à fibres longues ou par assemblage des deux,
– le convertisseur : généralement un moteur-générateur réversible. Il peut être intégré avec le volant ou relié à celui-ci par un axe et un système d'accouplement,
– le rotor : ensemble des parties tournantes,
– les paliers : ils maintiennent le rotor par rapport à l'enceinte et sont constitués de butées et paliers à éléments roulants, ou d'équivalents magnétiques sans contact. Il existe des solutions combinant des butées magnétiques et des éléments roulants,
– l'enceinte de confinement : elle participe au maintien du rotor et au maintien d'une
Page 18 Les batteries électromécaniques
À ces éléments viennent s'ajouter :
– l'électronique de puissance et de commande, interface entre le moteur-générateur et
l'extérieur de la batterie. Elle assure l'adaptation réversible de la puissance électrique,
– les éléments de sécurité passifs : paliers de secours et enceinte de sécurité. Ils ont pour
fonction le maintien du volant en cas de rupture d'un asservissement, par exemple, et l'absorption de l'énergie en cas de rupture du guidage ou du rotor,
– les éléments de contrôle et de surveillance : capteurs de vitesse, capteurs de pression…
Contrôle et Commande Volant Moteur/ Générateur Paliers, principaux et de secours Enceinte
Figure 1-3 : Principaux composants d'une batterie électromécanique
I.C. L
ES PRINCIPALES CARACTÉRISTIQUES
1) Caractéristiques énergétiques
La caractérisation des performances énergétiques des batteries, qu'elles soient électromécaniques ou électrochimiques, est réalisée à l'aide d'indicateurs de performance, sous la forme de valeurs indépendantes des dimensions du composant.
Parmis les nombreux indicateurs énergétiques envisageables, nous retiendrons les quantités maximales d'énergie accumulée par unité de masse ou d'encombrement, nommées respectivement énergie spécifique et densité d'énergie. D'autres indicateurs peuvent être utilisés en fonction de l'application visée, comme la puissance disponible par unité de masse ou d'encombrement, pour les onduleurs de forte puissance, ainsi que des indicateurs économiques :
Principes et constituants Page 19
coût du kilowatt heure accumulé ou du kilowatt disponible.
En ne considérant que la masse M du volant (masse active dans l'accumulation de l'énergie) et si le volant est un unique composant massif métallique à comportement élastique linéaire, l'énergie spécifique s'écrit en fonction de la résistance spécifique du matériau : rapport de la résistance mécanique Re sur la masse volumique ρ :
e e
E R
K
M = ρ , (1.1)
avec Ee l'énergie cinétique à la vitesse de rotation engendrant la contrainte dimensionnante Re.
Le coefficient de proportionnalité, K, est un coefficient de forme sans dimension appelé
coefficient d'énergie massique. Ce coefficient sera étudié ultérieurement. Il est inférieur à 1 et
caractérise la géométrie du volant indépendamment de son rayon. L'énergie spécifique du volant est quasiment indépendante de l'énergie accumulée.
De la même manière, la densité d'énergie est proportionnelle à la résistance du matériau :
e enc e enc E K R V = . (1.2)
Le coefficient de forme est nommé coefficient d'énergie volumique. L'encombrement est caractérisé par le volume Venc, balayé par le volant, ou par le volume du cylindre enveloppe du
volant. C'est cette dernière définition que nous retiendrons.
Ainsi, les caractéristiques du volant, et donc de la batterie, dépendent fortement des caractéristiques de résistance des matériaux le constituant. La plage de valeurs possibles est relativement étendue lorsque l'on envisage des matériaux comme les aciers, les alliages légers et les matériaux composites à fibres longues en carbone ou kevlar.
2) Autres caractéristiques, avantages / inconvénients
Les autres caractéristiques de fonctionnement des batteries électromécaniques sont les suivantes :
– durée de vie en cycles : il s'agit du nombre de cycles complets de charge décharge pour
lequel est dimensionné le volant. C'est un des principaux avantages de ces batteries, le dimensionnement en limite d'endurance d'un volant acier permettant un nombre de cycles théoriques "infini", par exemple. Les volants en matériaux composites à base de fibres de verre, de carbone ou d'aramide, sont typiquement prévus pour 100 000 cycles,
Page 20 Les batteries électromécaniques
– profondeur de décharge : c'est la proportion de l'énergie cinétique qui est effectivement
restituable. Elle dépend de la plage fonctionnelle de la vitesse de rotation. Elle varie entre 75% et 90%,
– puissance massique ou volumique : les possibilités sont très importantes, permettant
d'envisager des applications impulsionnelles. Les limites proviennent essentiellement du moteur-générateur, rarement des caractéristiques de résistance mécanique du volant,
– temps de décharge minimal : temps de décharge à puissance maximale en tenant compte
de la profondeur de décharge et des conditions de fonctionnement du composant, puissance constante ou non. Il caractérise l'adéquation du composant avec certaines applications.
Il s'agit, ici, des principaux avantages de cette technologie par rapport aux batteries électrochimiques. Nous pouvons y ajouter une parfaite connaissance de la charge de la batterie par simple mesure de la vitesse de rotation. Les principaux inconvénients proviennent des grandes vitesses de rotation :
– autodécharge : c'est la propension de la batterie à se décharger au cours du temps. Les
pertes proviennent des frottements dans les paliers et des frottements aérodynamiques,
– sécurité : la présence d'un corps en rotation rapide pose évidemment des problèmes de
confinement en cas de rupture du rotor ou du guidage. Lorsque l'application envisagée est mobile en environnement non contrôlé, cas d'une utilisation dans un véhicule électrique, cet aspect devient prépondérant,
– énergie spécifique : en tenant compte de l'ensemble des composants de la batterie, la
masse du composant peut être importante si le volant n'est pas constitué en matériaux à résistance spécifique élevée, comme les composites,
– couple gyroscopique : pour les applications mobiles, le couple gyroscopique généré par
les variations de position de l'axe de rotation peut être très important, nécessitant la réalisation de paliers adaptés et la décomposition de la batterie en modules de faible contenance.
Ajoutons que, si le prix au kilowatt heure des batteries électromécaniques est supérieur à celui des composants électrochimiques standards, le coût de l'accumulation par cycle d'utilisation est nettement inférieur. Ces systèmes posent aussi moins de problèmes de recyclage.
Principes et constituants Page 21
3) Caractéristiques comparées
Multon et Hirsinger 1994 [67] et [26,63,88] récapitulent les possibilités de différentes technologies de batteries. Ces résultats sont compilés Tableau 1-1. Notons qu'il s'agit uniquement des caractéristiques des masses actives, sans les électroniques de puissance et les enceintes de confinement, par exemple. Les batteries électrochimiques sont basées sur les couples plomb et acide, nickel et cadmium, et lithium/carbone et polymère. Notons que les pertes augmentant fortement avec la puissance délivrée, leur capacité massique dépend des conditions de fonctionnement. Les technologies à induction, ou utilisant des condensateurs et des capacités, permettent d'obtenir de fortes puissances crêtes pendant des durées courtes. Selon Rabenhorst 1981 [28], dans un bilan des projets et applications utilisant les volants d'inertie, la densité d'énergie des batteries métalliques prévue est inférieure à 12 Wh/kg ; les composites à bas prix permettent d'obtenir 22 Wh/kg et des performances de 40-60 Wh/kg sont envisagées pour les applications mobiles. Vingt ans plus tard, les performances des volants proposés à la vente par Flywheel Energy Systems Inc, Flanagan 1998 [99] vont jusqu'à 95 Wh/kg pour 100 000 cycles.
Accumulateurs électrochimiques Inertie Inductif
Condensa-teurs Capacités
Super-Performances 1995
Pb-Acide Ni-Cd LiC
Wh/kg 30 50 150 10-95 4 0,25 5,5 W/kg crête 80 200 200 ≈≈≈≈2000 28.106 qq 104 500-2000 Densité 2.4 2 2.6 2-7 2.1 1.4 2 Cyclabilité 500 à 80%
de PdD
1500 ≈1000 >100000 Très élevé Très élevé Élevé
Temps mini de
décharge 15 mn 15 mn 45 mn >15 s <1ms <<1ms 10 s Durée de
stockage >1 mois ≈1 mois >1 an qq heuresqq mn à >1 heure secondesqq
qq minutes
Coût de stockage F/kWh
≈1000 qq 1000 qq 1000 >1000 qq 100
Tableau 1-1 : Caractéristiques de la matière active des différentes technologies de batteries
D'autres technologies d'accumulation sont possibles. Kaftanoglu et al 1989 [45] en proposent quelques unes, basées sur la déformation élastique de corps solides ou non :
– accumulateur pneumatique ou hydraulique : 7,7 Wh/kg,
– déformation élastique de ressorts métalliques : 0,09 Wh/kg, – déformation élastique de bandes caoutchouc : 8,8 Wh/kg.
Page 22 Les batteries électromécaniques
Au vu de ces résultats, les points clefs des batteries électromécaniques sont principalement leur puissance spécifique et leur durée de vie en cycle. Cette technologie se place de façon intermédiaire entre les technologies chimiques et des technologies à faible temps de décharge.
Applications Page 23
II. A
PPLICATIONS
Les batteries électromécaniques sont principalement utilisées lorsque les technologies électrochimiques ne permettent pas d'obtenir facilement les performances imposées par le cahier des charges. Des informations générales sur les applications concernées sont données par Rabenhorst 1981 [28], Ashley 1993 [57], Acarnley et al 1995 [68] et Yonnet 1996 [88].
Remarquons que la crise pétrolière des années 70 a augmenté considérablement l'intérêt pour les volants d'inertie qui sont envisagés comme moyen de réduction des besoins énergétiques, dans le transport et dans le domaine de la distribution électrique urbaine. Cette période coïncide avec le développement des volants pour les applications spatiales et marque le début des applications industrielles, ce qui est mis en évidence par différents symposium dédiés aux volants d'inertie1 et au stockage inertiel.
II.A. L
A FOURNITURE DE COURANT RÉGULÉ
Les applications de fourniture de courant, régulé par des batteries électromécaniques, sont les applications nous intéressant le plus directement, puisqu'elles recoupent les objectifs de notre étude. Elles sont toutes stationnaires et consistent essentiellement :
– à sécuriser la distribution : fonction d'onduleur,
– à diminuer la puissance totale des moyens de production en utilisant les batteries
comme éléments de fourniture complémentaire lors des pics de consommation :
fonction d'écrêtage et de régulation,
– à servir d'intermédiaire entre différentes technologies de production, turbines éoliennes
et groupes électrogènes à moteur diesel par exemple : fonction tampon. Cette dernière comprend aussi des aspects de sécurisation et de régulation de la fourniture.
Ces applications se différencient aussi par les ordres de grandeur en capacité et en puissance envisagée. Par exemple, Schoenung et Burns 1996 [84] réalisent, pour un distributeur d'électricité de la région de New York (Niagara Mohawk Power Corporation), une évaluation des
1 Flywheel Syposium, 1975, Lawrence Livermore Lab., Californie EU; Symposium on Flywheel Technology,
Scottsdale, 1980 ; Flywheel Tech Symposium, 1980, Arizona EU; 2nd European Symposium on Flywheel Energy Storage, 83, Turin Italie
Page 24 Les batteries électromécaniques
technologies envisageables pour sécuriser la fourniture en courant d'une usine ou d'une région, ou pour écrêter la consommation en courant d'une région pendant 30 jours consécutifs l'hiver. Les capacités envisagées vont de 8 kWh à 550 MWh, et de 10 à 100 MW. D'après les auteurs, les batteries électromécaniques forment une solution acceptable pour les deux premières applications, en association avec des générateurs diesels dans le second cas. Des applications avec des capacités d'accumulation plus modestes ou moins centralisées sont aussi envisagées pour l'écrêtage journalier des consommations par Kirk 1977 [23], Mann et al 1991 [52] et Hull 1997 [90].
D'un point de vue pratique, c'est dans le domaine de la production d'énergie sur les sites isolés que les batteries électromécaniques ont un impact le plus direct. Modern Power Systems, Infield 1994 [66] et Davies et al 1995 [71] présentent ainsi des dispositifs mis en place pour alimenter des habitations clairsemées des îles d'Écosse et du Pays de Galle. Dans un cas, les batteries ont essentiellement un rôle de régulation du courant pour en augmenter la qualité : constance et continuité de la tension. Dans l'autre, sur les petites îles, l'objectif principal est d'assurer qu'un maximum de l'énergie consommée est produit par les génératrices éoliennes installées in-situ. Les batteries ont alors un rôle tampon, utile lorsque la consommation est proche de la production. Dans une association avec des groupes électrogènes diesels, elles permettent de rentabiliser l'installation en limitant au maximum les démarrages des groupes. Elles filtrent les surconsommations, ou les sous-productions, de courte durée [66]. De plus, leur faible constante de temps permet ces mises en route en limitant les perturbations sur le réseau. Ce dernier point est particulièrement important lorsque le moyen complémentaire est relativement peu réactif, hydraulique, par exemple [71].
Une autonomie d'une dizaine de secondes à quelques minutes semble suffisante avec les groupes diesels. Ainsi, l'île Fair (Écosse) est-elle alimentée par une éolienne de 55 kW qui, après l'installation d'un volant d'inertie de type multi-anneaux, en fibres de verre et en fibres de kevlar, produisait de 80% à 90% de l'énergie consommée [42,71].
Une autre réalisation est proposée par Flanagan 1988 [39]. En adaptant un volant développé pour les véhicules hybrides, il définit une batterie tampon devant s'associer à des panneaux photovoltaïques alimentant des phares ou des balises sur les côtes canadiennes, Figure 1-4. Ce module, de 1000 W, pourrait servir aux autres applications de régulation pour sites
Applications Page 25
isolés. Le volant utilise des matériaux composites à fibres de verre et de carbone. L'énergie accumulée est de 8,5 kWh, soit 45 Wh/kg pour le rotor. Il est dimensionné pour 100 000 cycles. Le temps de décharge minimal est de 8h30. Ce temps, très supérieur à ceux envisagés pour les associations avec les éoliennes, est à mettre en correspondance avec la durée des cycles de production des panneaux, à savoir 24 heures. La durée de vie prévue est de 20 ans, à raison de 250 cycles complets par an. Fradella 2000 [105] propose une autre réalisation basée sur un volant composite et devant s'associer à des moyens de production alternatifs.
Figure 1-4 : Vue d'ensemble d'une unité d'accumulation stationnaire, Flanagan 1988 [39]
II.B. L
ES AUTRES APPLICATIONS
1) Applications spatiales et onduleurs
Les applications spatiales, en particulier de stabilisation des satellites, Figure 1-5, et les onduleurs de fortes puissances, bien que peu présents dans la littérature, sont les deux applications pour lesquelles des produits commerciaux existent. Évidemment, les contraintes de réalisation ne sont pas les mêmes. Ainsi, les applications spatiales [57] utilisent des volants composites de grande énergie spécifique à base de composites hautes performances. Une utilisation comme batterie est étudiée par Kirk et Anand 1988 [41]. Au contraire, les onduleurs
Page 26 Les batteries électromécaniques
sont des applications stationnaires, pouvant utiliser des volants métalliques basse vitesse de très faible énergie spécifique [91]. Active Power 1998 [92] et Bradley 1998 [96] commercialisent ainsi des onduleurs pouvant fournir respectivement 500 kW pendant 13 secondes, et 1 MW pendant 15 secondes. Andoh et al 1997 [89] étudient un composant de 5 kW, utilisant un volant de 120 Wh pour 4,5 Wh/kg tournant à 15000 tr/mn. Les volants sont placés dans des enceintes à faible pression pour limiter les pertes. Les faibles valeurs de l'énergie spécifique sont en partie liées aux coefficients de sécurité utilisés.
Figure 1-5 : Yonnet 1996 [88], Volant composite de positionnement du satellite Spot, Aérospaciale
2) Véhicules de transport
C'est dans le transport que l'on trouve le plus de projets intégrant un volant d'inertie, dans les transports en commun sous toutes leurs formes, et dans les véhicules personnels à propulsion hybride, électrique-thermique. Remarquons que, si ces applications font l'objet d'une grande majorité des études de la littérature, les applications réelles et commercialisées sont peu nombreuses.
Quelques applications autonomes existent ou existaient, [28] pour les trains de mine du Royaume Uni et de l'ex URSS, par exemple. Un petit bus suisse urbain, l'Oerlikon, pendant 17 ans et avant 1940, a fonctionné sur un volant de 1500 kg et de 2 Wh/kg, également rechargé en station.Plus récemment, Darvill 1993 [58] présente un tramway tout électrique aussi rechargé en station : 25 personnes, volant de 250 kg basse vitesse, 4 km d'autonomie, 56 km/h maximum et 90 secondes de temps de recharge. Un modèle à l'échelle 1/3 semble avoir été présenté et testé en 1992.
Applications Page 27
publiques à envisager la récupération de l'énergie de freinage des véhicules en utilisant les performances en puissance des volants. Elle convient, plus particulièrement, aux moyens de transport en commun qui s'arrêtent fréquemment et qui sont peu gênés par la masse ajoutée. Nous retrouvons, ainsi, des essais sur des métros et des tramways, à New York, Boston ou Milan dans les années 70 [28]. Flanagan et Suokas 1976 [19] présentent une étude pour le métro de Toronto (volant acier de 11 Wh/kg). Les gains escomptés sur la consommation varient entre 14% et 26%.
La récupération dans les bus est aussi envisagée, Brusaglino et al [33] pour Fiat (volant de 20 Wh/kg), Genta 1988 [40] et Küng et al 1992 [56], par exemple. Selon Ashley 1996 [77], deux bus ont été testés en Allemagne, sans pour autant être suivis d'une commercialisation.
Des études sur des véhicules personnels hybrides (thermique et électrique) [62,28,75] ont été entreprises dès 71, aux États Unis et par Volvo et Volkswagen en Europe. Les batteries sont réalisées en modules de faible contenance, tournant éventuellement en sens contraire, afin de limiter les effets gyroscopiques. Plus récemment, ce sont des volants composites qui sont envisagés [63,81] et testés [57,88], en particulier par les équipes de Flanagan depuis le début des années 80 [32,36,48,99]. Actuellement, selon Ashley 1993 [57], l'utilisation des volants dans les véhicules de transport est principalement limitée par les aspects de sécurité, devenus prépondérants.
3) Applications impulsionnelles
Des applications, à base de volants d'inertie, sont aussi envisagées dans le cadre d'applications militaires pour des canons ou fusils à impulsion électromagnétique. Gully et al 1993 [60] étudient une solution pour des salves d'obus de 30 mm. Le volant composite, de 11 kWh pour 29 Wh/kg, associé à un moteur-générateur de 8,5 MW de pointe, se décharge en quelques secondes. L'énergie spécifique de l'ensemble, volant, moteur-générateur, paliers et enceinte, est de 7 Wh/kg. La solution proposée par Curtis et al 1995 [70] est un disque composite très fin, de 35 Wh/kg, intégrant le bobinage rotorique du moteur-générateur. Il fait 31 cm de diamètre, doit tourner à 40 000 tr/mn et se décharger en moins de 6 ms.
Page 28 Les batteries électromécaniques
II.C. C
OMPARATIF
Les différentes applications présentées se différencient, en particulier, par leur aspect stationnaire ou mobile, qui induit des contraintes de conception très différentes. Les particularités portent aussi sur l'importance relative des caractéristiques énergétiques, en énergie et en puissance, ainsi que sur la durée de vie en cycles et les pertes par autodécharge admissibles. Ces dernières conditionnent le rendement du composant. Les temps de charge et de décharge minimales, ainsi que la durée de conservation de l'énergie, conditionnent aussi les technologies utilisées. Les estimations de ces différentes caractéristiques sont présentées Tableau 1-2. Les symboles représentent leur importance relative sur le cahier des charges et les choix techniques. Nous n'avons pas estimé les ordres de grandeur des critères économiques, ni ceux des capacités d'accumulation et de puissance. Pour un même composant élémentaire, la modularité de cette technologie permet de couvrir de grandes plages de valeurs.
Pour les applications de fourniture de courant, sur sites isolés ou non, les points critiques sont les pertes par autodécharge, qui doivent être faibles, et la durée de vie en cycles qui doit être importante. Importance de … Appli. Fonction de la batterie Mobile E/M E/V P/M P/V Nb
Cycle autodé-charge tps
déch.1 accu.tps2
tampon entre éolien et autre moyen non - - - - + + + 15 s > H tampon avec panneaux photovolt. non - - - - + + + >3H >12H Fourniture courant
transfert de production non - - - - + + + + + >qq H >12H récupération énergie
de freinage
oui** + + + + + + + - 1 mn >10 mn
lissage consommation oui + + + + + + + + + + > qq mn > H Transport
batterie principale (trajets courts)
oui + + + + - - + + + >10mn >10mn
Onduleur batterie principale non - - + + + + - + 10s 1mn *
Spatiale batterie principale oui + + + + + + + + + + + + + >qq mn >20mn
Impulsion-nelle
batterie tampon oui - - + + + + + + + + - <0,1s >mn
1 : temps minimal de décharge ; 2 : temps, ou durée, de conservation de l'énergie * : toujours raccordé à l'alimentation principale
** : la récupération de l'énergie de freinage d'un métro a été envisagée par l'intermédiaire de volants stationnaires placés dans les stations souterraines
Technologies des constituants Page 29
III. T
ECHNOLOGIES DES
CONSTITUANTS
Les principaux constituants des batteries électromécaniques, hors systèmes de contrôle et de gestion, sont le volant, le moteur-générateur, les paliers et les éléments de sécurité (enceinte et paliers de secours). Nous réalisons ici un panorama des technologies utilisées dans la réalisation de ces différents éléments.
III.A. L
E VOLANT
En dehors des applications de type impulsionnel, le volant est l'élément principal du rotor dans l'accumulation de l'énergie. Il fait l'objet de nombreuses études, dont nous séparons l'historique en trois parties. Les deux premières s'intéressent aux matériaux isotropes et se distinguent par les outils mis en œuvre, principalement par l'utilisation ou non des moyens informatiques de résolution numérique et d'optimisation. La 3ème partie concerne les réalisations utilisant des matériaux composites. Nous présentons, ensuite, quelques solutions basées sur la variation d'inertie du rotor, avant d'aborder la description des propriétés énergétiques et mécaniques des principales solutions de la littérature.
Les équations utilisées pour les résolutions 2D sont données en annexe I.
1) Étude 2D, isotrope, analytique et itérative
À la fin du 18ème siècle et au début du 19ème, si les volants d'inertie sont principalement utilisés pour la régulation de la vitesse de rotation, leur étude bénéficie des recherches sur les aubes des turbines à gaz qui imposent la définition de profils résistants. Les calculs des répartitions de contrainte et des caractéristiques énergétiques sont réalisés sous les hypothèses de contraintes planes et d'axisymétrie. La démarche consiste à décomposer le profil en éléments de base de comportement connu. Grubler 1906 [2] décompose la section en portions de courbe en puissance, solution complexe sans outil de calcul numérique. Donath 1912 [3] et Grammel 1936 [7] décomposent en anneaux de section constante, ce qui génère des discontinuités de profil et de contrainte. Bisshopp 1944 [8] utilise comme élément de base des cônes.
Page 30 Les batteries électromécaniques
Entre-temps, Stodola 1924 [5] (traduction anglaise [9]) fait un bilan des techniques et propose, comme structures optimales en énergie spécifique, les sections de forme exponentielle, pour les disques non percés, et les sections hyperboliques pour les volants possédant un passage d'axe. Cette technique permet d'assurer l'égalité des contraintes radiales et tangentielles et leur uniformité dans la structure. Dite isocontrainte, elle maximise l'utilisation de la matière et permet des vitesses de rotation importantes. Sa section conduit à un diamètre théorique infini, évidemment tronqué en pratique.
La plupart de ces travaux sont de nouveau repris dans Timoshenko et Goodier 1934 [6] (traduction française [10]). Les auteurs font un tour d'horizon des connaissances en élasticité en ce premier tiers du 19ème siècle. De nombreux passages portent sur les systèmes tournants. Nous retrouvons ainsi la formulation en contrainte des problèmes 2D en coordonnées polaires puis sous l'hypothèse d'axisymétrie. Une formulation en fonction de force est aussi présentée, ainsi que l'exposé des résultats de Stodola sur les cylindres pleins ou creux de section constante, et sur ceux définis par une fonction en puissance. Il développe aussi une solution 3D approchée des contraintes dans un cylindre plein de section constante. C'est, enfin, une importante source de références bibliographiques.
Dans son ouvrage de résistance des matériaux, Timoshenko 1956 [11] (traduction française [12]) propose aussi un mode de calcul pour les volants de type "roue à rayons", repris dans Curtis 1986 [35].
Les études analytiques se poursuivent jusqu'à aujourd'hui. Georgian 1989 [44] propose ainsi l'étude de la combinaison d'une géométrie isocontrainte avec un anneau de section constante, les deux parties pouvant être réalisées en matériaux différents.
2) Optimisation et outils numériques
Accéléré par la crise pétrolière des années 70, le développement des batteries électromécaniques profite de l'arrivée des moyens informatiques et du calcul numérique. Ils permettent d'envisager des géométries plus complexes et surtout de lancer des processus d'optimisation. Ils sont réalisés en 2D et utilisent les techniques de décomposition définies au début du siècle ou modélisent la section par des fonctions à plusieurs paramètres.
De Silva 1969 [13] illustre les possibilités d'optimisation par décomposition en éléments de section constante. De même, Seireg et Surana 1970 [14] et Surana et Seireg 1971 [15] réalisent
Technologies des constituants Page 31
l'optimisation de la section du volant pour divers objectifs portant, en particulier, sur la répartition des contraintes. Curtis et Berger 1977 [21] définissent la section par des splines paraboliques. Ces décompositions posent quelques problèmes numériques liés à la sensibilité de la solution aux nombreux paramètres définissant la section. Ceci a conduit différents auteurs à rechercher une modélisation de la section plus globale, les différents paramètres intervenant sur l'ensemble de la géométrie. Ainsi, Bhavikatti et Ramkrishnan 1980 [24] et Ebrahimi 1988 [38] modélisent la section par un polynome et Sandgren et Ragsdell 1983 [31] par une série de Fourrier (jusqu'à 7 coefficients).
3) Utilisation des matériaux composites
Dans la même période, arrivent les premières études basées sur des matériaux composites à fibres longues, dont les caractéristiques spécifiques sont bien supérieures à celles des matériaux métalliques. Ils permettent la réalisation de batteries plus légères, utilisées dans le spatial pour le positionnement des satellites, et qui sont envisagées comme la solution idéale pour la récupération d'énergie, en particulier dans les transports.
Deux démarches sont utilisées. Dans l'une, les auteurs supposent qu'un matériau équivalent isotrope peut être obtenu par le contrôle de l'orientation des fibres ou des couches de composites unidirectionnelles, Georgian 1989 [44] et [20,78]. Dans l'autre, ils recherchent et étudient des structures compatibles avec l'orientation privilégiée du matériau : anneaux fins, coques, fibres radiales. Cette dernière approche a permis la définition des volants utilisés aujourd'hui. Cependant, si les caractéristiques massiques de ces structures sont bonnes, elles sont relativement creuses, et la diminution de leur encombrement devient le principal enjeu et objectif des études.
Rabenhorst 1974 [17] envisage l'assemblage de plusieurs anneaux fins, éventuellement lestés. La principale difficulté provient alors du maintien de la cohésion du volant, le déplacement radial étant proportionnel au carré du rayon des anneaux. Plusieurs solutions sont proposées. Elles utilisent des moyeux déformables ou interposent, entre les éléments, des anneaux souples, en élastomère, par exemple, Danfelt et al 1977 [22], Portnov 1989 [46]. Ces études sont généralement conduites autour de processus d'optimisation.
Page 32 Les batteries électromécaniques
Les résultats analytiques 2D du comportement mécanique des anneaux avec matrice obtenus par enroulement sont présentés par Danfelt et al 1977 [22], Kaftanoglu et al 1989 [45] et Curtis et al 1995 [70]. Ils font apparaître deux modes de rupture, le critère dimensionnant s'appliquant indépendamment dans les directions principales d'orthotropie : rupture tangentielle brutale, intervenant généralement au diamètre intérieur de l'anneau, et rupture de la matrice au cœur du volant, prépondérant dès que l'épaisseur de l'anneau devient importante. Ces structures sont étudiées en détail par Portnov 1989 [46], qui envisage différentes stratégies pour améliorer les performances, en particulier la densité d'énergie : contrôle de la tension du fil lors de la réalisation par bobinage, contrôle du champ thermique lors de la fabrication et, surtout, utilisation de plusieurs anneaux frettés et collés. Cette dernière technique fait aussi appel à des processus d'optimisation, réalisés à partir des équations analytiques par Kaftanoglu et al 1989 [45] et Ha et Tsai 1996 [79], suivant divers critères. La Figure 1-6 reprend des illustrations de Curtis 1986 [35] qui regroupent plusieurs réalisations en matériaux composites.
Figure 1-6 : Exemples de réalisations en matériaux composites, Curtis 1986 [35]
De nombreuses difficultés apparaissent lors de la réalisation de ces volants :
– maintien du volant sur un axe en tenant compte de la dilatation de ce premier. Ceci est résolu par l'utilisation de moyeux déformables, Flanagan 1986 [36]et [49,85],
Technologies des constituants Page 33
tensions de bobinage et aux gradients de température lors de la polymérisation de la matrice [25,74].
Le coût de développement et de test de ces volants en matériaux composites est important. Ils sont surtout utilisés dans le domaine spatial.
4) Solutions à variation d'inertie
Si la variation de l'énergie accumulée provient très généralement de la modification de la vitesse de rotation, il existe quelques propositions utilisant des structures à inertie variable.
Ainsi, Harrowell 1994 [64] propose d'utiliser un anneau en caoutchouc comme volant. Une variation de quelques pour-cent de la vitesse de rotation induit une variation importante du diamètre et réalise la charge ou la décharge de l'énergie. Le coût de l'accumulation est sensé être faible, mais les performances énergétiques sont du même ordre, inférieures à 4 Wh/kg pour une déformation maximale de 300%, sans compter le système de retenue de l'anneau. Une élongation maximale de 500%, ou l'utilisation de matériaux plus rigides et résistants, permettrait d'atteindre les 10 Wh/kg. Le prix de l'accumulation serait en concurrence avec celui des batteries électromécaniques métalliques, avec l'inconvénient d'un encombrement important et l'avantage d'une vitesse de rotation relativement constante. Le vieillissement du caoutchouc n'est pas considéré dans cette étude.
Une autre solution, proposée dès la fin des années 70 et reprise par Moosavi-Rad et Ullman 1990 [50] et Moosavi-Rad 1995 [73], comprend un axe et un carter externe reliés par une bande métallique. En fonction de la vitesse relative de l'axe par rapport au carter, cette bande a tendance à s'enrouler sur l'axe ou, au contraire, à se dévider de l'axe pour se positionner en appui sur le carter. Ces variations modifient l'inertie du rotor. Les caractéristiques énergétiques du système sont faibles, pour des raisons d'équilibrage, et parce que la bande représente une masse "inerte", sans résistance propre.
Si ces deux solutions sont originales, elles ne se justifient que pour des applications spécifiques et un contexte économique particulier. Nous ne reviendrons pas sur ces solutions par la suite.
Page 34 Les batteries électromécaniques
5) Bilan et propriétés
a) Caractérisation énergétique
Lorsque les volants sont réalisés en un unique matériau isotrope, les potentialités des différentes solutions, Tableau 1-3, sont caractérisées par les coefficients de forme, d'énergie massique K et d'énergie volumique Kenc, Flanagan et Suokas 1976 [19], Kirk 1977 [23],
Kaftanoglu et al 1989 [45], et aussi [48,64,88]. Ces coefficients sont calculés en limite d'élasticité des matériaux et ne tiennent donc pas compte des phénomènes de fatigue liés aux variations de vitesse. Lorsque ceux-ci sont estimés, c'est par l'intermédiaire d'un coefficient s'appliquant à la résistance du matériau, 0,5 pour Rabenhorst 1981 [28], par exemple, ou par l'intermédiaire d'un raisonnement unidimensionnel [19]. L'encombrement des volants, quand il est évalué, est associé au volume balayé [23]. Dans le Tableau 1-3, les coefficients d'énergie volumique sont recalculés avec le volume du cylindre enveloppe du volant.
Le Tableau 1-4 donne les caractéristiques, en limite d'élasticité, de différents matériaux métalliques représentatifs et de quelques composites unidirectionnels à fibres longues. Pour les matériaux métalliques, les résistances spécifiques et les résistances sont exprimées, par simple changement d'unité, respectivement en Wh/kg et en W/litre. Elles permettent, par multiplication avec les coefficients de forme, d'obtenir les potentialités de la géométrie associée, cf. équations (1.1) et (1.2).
Pour les structures réalisées en matériaux composites, le calcul des performances du volant fait généralement intervenir de nombreux paramètres, en particulier l'anisotropie des résistances et des rigidités, Portnov 1989 [46]. Cependant, les auteurs utilisent généralement les coefficients du cylindre creux à paroi mince comme géométrie représentative. Elle est mécaniquement compatible avec les caractéristiques des composites enroulés et permet d'estimer les potentialités de ces solutions. La résistance des composites unidirectionnels correspond à la limite de rupture. Elle est confondue avec la limite élastique, ce qui conduit à surestimer les caractéristiques énergétiques. Notons que les valeurs spécifiques sont nettement supérieures à celles des matériaux métalliques. Les énergies massiques associées sont au moins deux fois supérieures à celles des solutions métalliques, Tableau 1-4. Les réalisations pratiques sont rarement constituées d'un seul anneau, mais généralement de plusieurs, frettés, collés, et souvent de matériaux différents. Ainsi, les solutions sont généralement exprimées directement en énergie spécifique et
Technologies des constituants Page 35
en densité d'énergie. Elles sont calculées par optimisation pour des cas particuliers, Tableau 1-5.
Type volant Forme du volant et de sa section K Kenc kV
Barre section carrée de côté le dixième de la demi-longueur 0,33 0,02 1,4 Barre exponentielle
section carrée sur l'axe 0,49 0,015* 2,5
Cylindre plein 0,61 0,61 1,55
Cylindre creux rayon intérieur / rayon
extérieur : 0,4
0,34 0,28 1,1
ou 0,92
(utilisé comme référence pour les matériaux
composites) 0,47 0,07 1 Cône tronqué 0,8 0,36* 2 Exponentielle modifiée 0,9 0,35* 2,5 Tri-hyperbole creuse 0,65 0,1* 2 Roue à rayons 0,35 0,2* 1
Tableau 1-3 : Coefficients de forme et de vitesse des principales géométries de la littérature. * volume d'encombrement différent du volume balayé ou non présent dans la littérature
Page 36 Les batteries électromécaniques Matériaux (Mpa)Re ρ (SI) Re/ρ
(Wh/kg) Re (Wh/litres) Plage de Ee/M (Wh/kg) Plage de Ee/Venc (Wh/litres) Vmax (m/s) pour kV=1 35NiCrMo16 880 7800 31 244 10-28 4-149 335 Maraging 300 1950 7800 69 542 23-63 8-330 500 TA6V 870 4420 55 241 18-49 4-147 440 10-2-3 1228 4420 77 341 25-69 5-208 530 2017A 280 2790 28 78 9-25 1-47 316 7049A 570 2800 57 158 19-51 2-97 450 Verre R / époxy 1655 2080 221 460 104 32 890 Carbone R / époxy 1380 1520 250 383 117 27 960 Aramide / époxy 1400 1370 284 388 133 27 1000
Tableau 1-4 : Caractéristiques typiques des matériaux. Les plages d'énergie spécifique Ee/M et de
densité Ee/Venc sont obtenues par multiplication des valeurs de résistance spécifique et de résistance avec
les valeurs limites de K et Kenc du Tableau 1-3. Les caractéristiques des matériaux composites sont
déterminées avec le cylindre creux de rapport des rayons 0,92
Auteurs Fibres Nb.
d'anneaux (Wh/kg)E/M (Wh/litre)E/Venc
Portnov 1989 [46] Verre 5 47 100
Carbone 4 74 116
Boron 4 56 114
Kevlar 7 65 85
Kaftanoglu et al 1989 [45] Carbone, caoutchouc, verre 3 103 90
Verre R, Kevlar 49, Thornel
(Carbone) 300 3 105 81
Verre E, Verre S, Kevlar 49 3 94 90
Ha et Tsai 1996 [79] Carbone / époxy 10 73 87
Flanagan 1986 [36] * Verre R, Carbone R 2 42 51
Flanagan et al 1990 [48] * Aluminium, Verre R, Carbone R
3 46 58
Flanagan 1998 [99] * Verre R, Carbone R
2 95 ≈115
Tableau 1-5 : Caractéristiques énergétiques de solutions composites de la littérature * : caractéristiques pour 100 000 cycles
b) Similitude des états de contrainte
La possibilité de décrire les potentialités d'une structure à partir de coefficients sans dimension, indépendants de la taille du volant (en particulier de son rayon extérieur R) provient
![Figure 1-5 : Yonnet 1996 [88], Volant composite de positionnement du satellite Spot, Aérospaciale](https://thumb-eu.123doks.com/thumbv2/123doknet/14716405.568902/29.892.213.669.350.601/figure-yonnet-volant-composite-positionnement-satellite-spot-aérospaciale.webp)
![Figure 2-2 : Évolution des contraintes adimensionnées radiales et tangentielles pour différentes valeurs du rapport des rayons α =R i /R ; x ∈ [ ,1]α](https://thumb-eu.123doks.com/thumbv2/123doknet/14716405.568902/60.892.283.600.391.693/figure-évolution-contraintes-adimensionnées-radiales-tangentielles-valeurs-rapport.webp)





![Figure 3-30 : Proposition de Curtis et al 1995 [70] réalisée par empilement de couches à prédominance radiale ou tangentielle](https://thumb-eu.123doks.com/thumbv2/123doknet/14716405.568902/125.892.120.752.616.862/figure-proposition-curtis-réalisée-empilement-couches-prédominance-tangentielle.webp)
