Deterministic Automata for Unordered Trees
Texte intégral
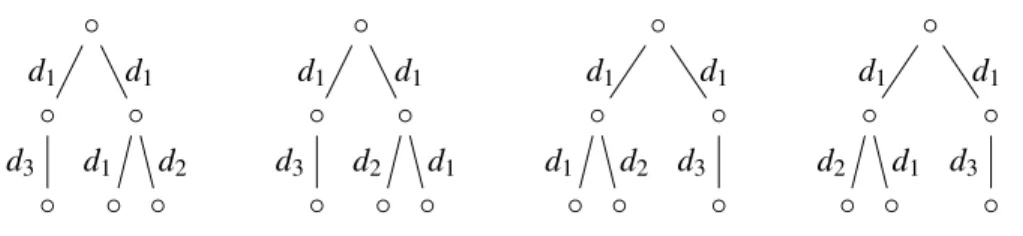
Figure

Documents relatifs
The field auto correlation functions and the corresponding photon count traces of the citrate-stabilized gold nanoparticles are shown below, and the result of
We then proposed an algorithm to detect these patterns and to merge them, thus leading to compressed structures corresponding to DAGs augmented with return edges7. In this
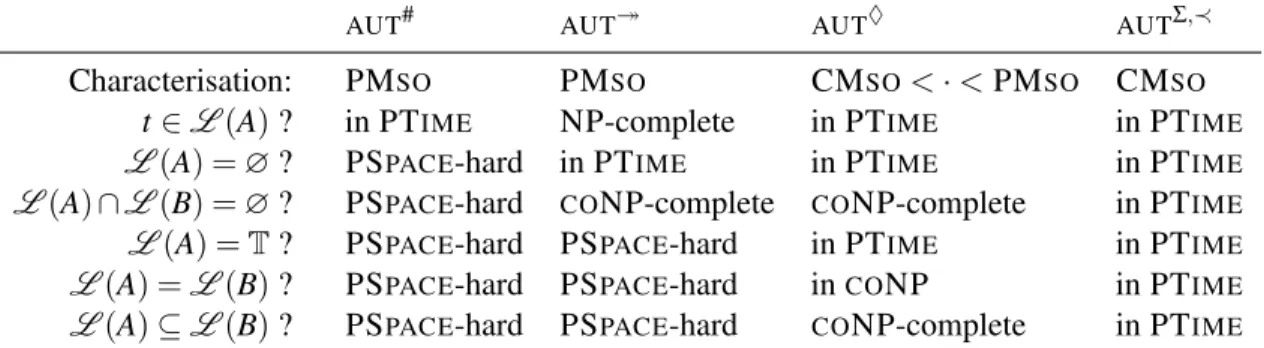
The problem of minimizing the number of states of a finite unranked tree au- tomaton is particularly relevant for classes of deterministic automata, since, for these
Starting from a sightly different algebra for trees, Niehren and Podelski defined in [14] a notion of (feature) tree automata for which accepted languages coincide with T
This last feature stems from a non-reversible phenomenon which leads to the spheroidization of the AgNWs (due to the total surface energy reduction). This
Although these two studies appear contradictory in terms of the propagation direction, our model can easily reconcile these findings by positing that alpha- band traveling waves
as a bottom-up tree automaton running on dags; and the language of a DA was defined as the set of dags that get accepted under (bottom-up) runs, defined in the usual sense;
We prove that a uniform, rooted unordered binary tree with n vertices has the Brownian continuum random tree as its scaling limit for the Gromov-Hausdorff topol- ogy.. The limit
