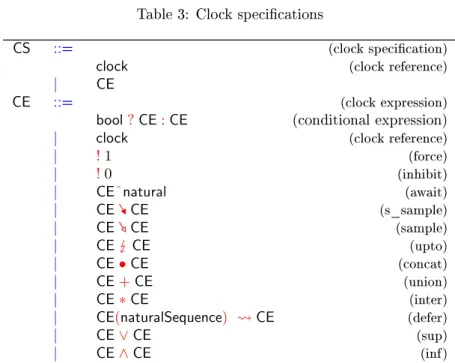
Syntax and Semantics of the Clock Constraint Specification Language (CCSL)
Texte intégral
Figure

Documents relatifs
On le sait, le musée n’a jamais fait l’objet d’une rénovation complète et d’envergure depuis sa construction en 1910, même si certains travaux ont été entrepris pour
Their study in silico by DFT indicates that: (1) the oxetane corresponds to a local minimum on the ground state potential energy surface, indicating that it is electronically
À partir de l’étude de plusieurs séries de l’Aurignacien ancien (l’abri Castanet en Dordogne, la grotte des Hyènes dans les Landes et la grotte Gatzarria dans les
Ante todo el ser humano es un ser social, nace, vive y interactua dentro de la sociedad a pesar de eso hay personas que carecen de ese proceso de sociabilizaciόn por su tίmidez,
A set of three β-sheet amphiphilic peptides, decorated with different orders of the catalytic triad amino acids, Glu, His and Ser along the strands were evaluated for their
Ces résultats indiquent ainsi que l’érosion à long terme constatée d’environ 1 mm/an (intégrant les remontées de terre) peut être simplement le fait d’un événement analogue
Les Pôles d’activités disposent d’une marge de manœuvre conséquente dans le sens où le directeur général de l’établissement délègue une grande
Therefore, considering the Ta extraction performances by 4-MAcPh, we studied the efficiency and the selectivity of this system toward Ta contained in a simulated leaching solution
