Sur des Gouttes, Cristaux Liquides et Front
Texte intégral
Figure



Documents relatifs
[r]
[r]
Parmi tous ces patrons, quels sont ceux qui permettent de construire le prisme ci-contre :.. E XERCICE
Calculer la longueur AC en appliquant la propriété de Pythagore au triangle ABC
Expérience : Je vais mesurer la masse, puis le volume de l’objet, puis je vais calculer la masse volumique en appliquant la formule. (Je confirme ce résultat en approchant un
Pour réaliser la photo ci-dessus on a introduit de l’huile de colza dans un verre contenant un mélange d’eau et d’alcool ayant la même masse volumique que l’huile. A partir
(8)制订各个职业卫生领域内的准则和手册,包括:控制技术和接触限度,早期发现与工作有
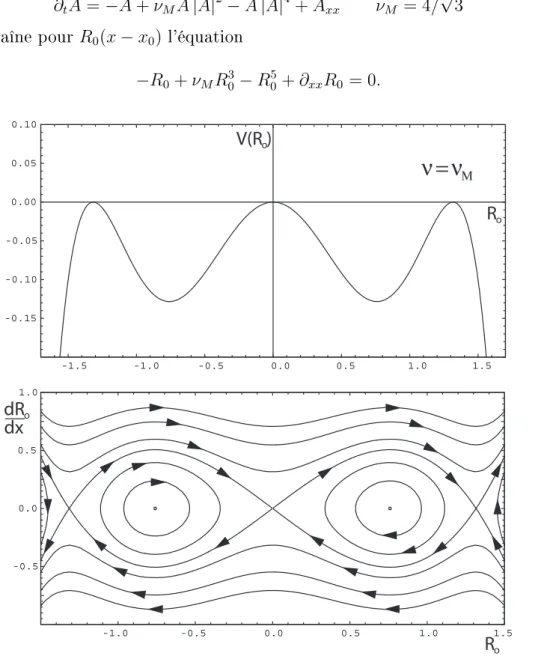
Dans la texture pseudo-planaire, les molécules du cristal liquide ne sont pas parallèles entre elles partout comme elles le sont dans la texture homéotrope, ce qui fait
