Modélisation de la déformation de transformateurs de puissance par approche magnéto-mécanique
Texte intégral
Figure
Documents relatifs
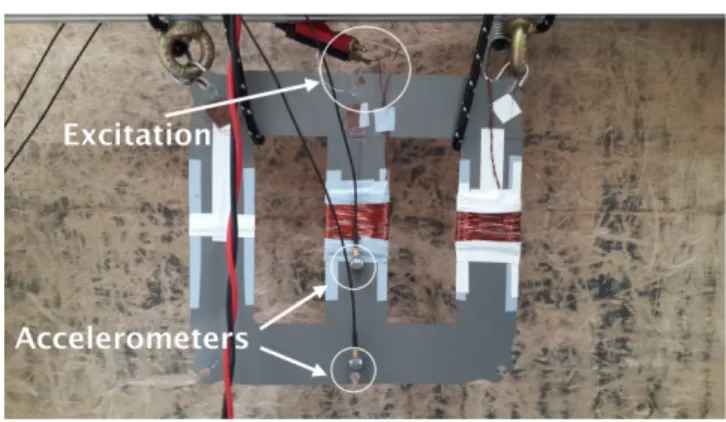
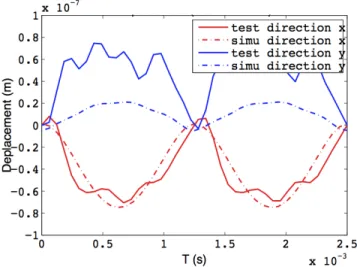
Nous nous intéressons ici au développement d’une chaîne de modélisation complète, du comportement local du matériau au calcul de la déformation totale de la structure, à
Imatinib is an inhibitor of bcr-abl, KIT and PDGFR and has revolutionized the treatment of chronic myelogenous leukemia and gastrointestinal stromal cancer (GIST) [4, 5].. Thus,
In general the PZT generates around 0.2 % at maximum strain [1]. Therefore many EAPs are made incorporating with PZT particles in polymer matrixes [45-48]. Researchers have thus
http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=2447716&tool=pmcentrez&rendertype=abstract [Accessed January 21, 2015]. Post-translational translocation into
Dans un première ûgmps nous présentés la ésolution du problèrne magnétique, tel que le potentiel vect€ur magnétique et l' magnétique, puis nous avons utililés
60 Fe nucleosynthesis-clock isotope in galactic cosmic rays. Bird and for the VERITAS Collaboration. VERITAS observations of the Cygnus Region. Hubble Space Telescope Imaging of
Table 4: Average modelled tree diversity at genus level based on binary and probability stacked models, for integrated and stratified approaches and for urban and
Data accessibility Data are supplied with this article Mendeley Dataset: campanari, Maria-Letizia (2020), “Freezing activity in a new FUS mutant zebrafish line ”, Mendeley Data,
