HAL Id: tel-02586304
https://hal.inrae.fr/tel-02586304
Submitted on 15 May 2020HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
I. Guenova Welz
To cite this version:
I. Guenova Welz. Mise en oeuvre d’une commande robuste pour les canaux d’irrigation. Sciences de l’environnement. Doctorat Automatique-Productique, INP de Grenoble, 2005. Français. �tel-02586304�
T H E S E pour obtenir le grade de
DOCTEUR DE L’INPG
Spécialité : « Automatique, Productique»
préparée au Cemagref de Montpellier dans le cadre de l’Ecole Doctorale
« Electronique, Electrotechnique, Automatique, Traitement du Signal (EEATS
)» présentée et soutenue publiquementpar
Iana Guenova Welz
le 31 mai 2005
Titre :
Mise en œuvre d’une commande robuste pour les canaux d’irrigation
_______ Directeur de thèse :
Didier Georges
______JURY
M. Luc Dugard , Président
M. Jacques Sau , Rapporteur
M. Joseba Quevedo , Rapporteur
M. Didier Georges , Directeur de thèse
M. Xavier Litrico , Directeur de thèse
CemOA
: archive
ouverte
d'Irstea
Station expérimentale du canal de Gignac
. co-financé par :
- l'Etat (Ministère de l'Agriculture et de la Pêche; et Cemagref)
- le Conseil Régional de Languedoc-Roussillon
dans le cadre du contrat de plan 2000 – 2006
- l'Agence de l'Eau Rhône-Méditerranée-Corse
- le Conseil Général de l'Hérault
. et réalisé en collaboration avec l'ASA du canal de Gignac
CemOA
: archive
ouverte
d'Irstea
CemOA
: archive
ouverte
d'Irstea
CemOA
: archive
canaux d’irrigation. Les canaux d’irrigation sont des syst`emes hydrauliques `a surface libre qui servent `a conduire l’eau de sa source vers ses usagers. La mise en oeuvre de la commande auto-matique est effectu´ee en deux ´etapes. D’abord, on s’int´eresse `a la mod´elisation du syst`eme r´eel, puis on ´etudie la synth`ese de la loi de commande. Un mod`ele lin´eaire `a la base des ´equations de Saint Venant est con¸cu pour la commande. Les mod`eles de deux syst`emes r´eels, le canal d’Evora (Portugal) et le canal de Gignac (France) sont obtenus et analys´es dans le domaine fr´equentiel. La deuxi`eme ´etape de l’application de la commande automatique consiste dans l’´ela-boration d’une m´ethodologie de contrˆole robuste. L’analyse de la stabilit´e, de la performance et des marges de robustesse de la boucle ferm´ee est effectu´ee `a l’aide des outils de l’automatique classique. Des contrˆoleurs de type PI d´ecentralis´es sont synth´etis´es pour un syst`eme mono-bief. Leurs performance et robustesse sont test´ees de fa¸con exp´erimentale et en simulation. Les r´e-sultats obtenus confirment la pertinence de la m´ethodologie g´en´erique de mod´elisation et de contrˆole. Cette m´ethodologie est ´etendue ensuite dans le cas d’un syst`eme multi-biefs. Le sys-t`eme multi-biefs « h´erite » les propri´et´es de stabilit´e et de robustesse des syssys-t`emes mono-bief. Par contre, la performance globale du syst`eme est d´egrad´ee `a cause des interactions entre sous-syst`emes mono-bief. Afin de rem´edier `a ce probl`eme, on propose la synth`ese d’une commande anticip´ee.
Mots-cl´es :
Canaux d’irrigation, commande robuste d´ecentralis´ee, analyse, contrˆoleurs PI, application
Abstract
This thesis deals with the robust control of irrigation canals. Irrigation canals are used to convey water from its source towards its users. First of all, the modelling of the real system is considered. Then, the implementation of the control law is studied. A linear model based on the Saint Venant equations is obtained for control purposes. Two real systems are modelled and analysed in the frequency domain : the Evora canal (Portugal) and the Gignac canal (France). Then, a methodology for robust control is elaborated. Stability, performance and robustness analysis is done using theory and classical control tools. Decentralised PI controllers are designed for a one-pool system. The performance and the robustness of these controllers are tested in real conditions and through simulations. The results validate the generic methodology for modelling and control. This methodology is then extended for a multi-pool system. The multi-pool system ”inherits” stability and robustness properties of the sub-systems. However, it is shown that the interactions between sub-systems decrease the overall performance of the controlled system. This loss of performance can be reduced by a feedforward controller.
Keywords :
Irrigation Canals, Decentralised Robust Control, Linear Analysis, PI Controllers, Application
CemOA
: archive
ouverte
d'Irstea
CemOA
: archive
Ce travail de th`ese a ´et´e effectu´e au sein de l’Unit´e de Recherche Irrigation du Cemagref de Montpellier sous la direction de Monsieur Xavier Litrico et Monsieur Didier Georges.
Que Monsieur Xavier Litrico, charg´e de recherche au Cemagref de Montpellier, re¸coive toute l’expression de ma reconnaissance pour m’avoir propos´e ce sujet de recherche et m’avoir encadr´ee pendant les trois ann´ees de th`ese.
Je remercie Monsieur Didier Georges, Professeur `a l’Institut National Polytechnique de Gre-noble, pour ses encouragements et sa disponibilit´e.
Je remercie Monsieur Jacques Sau, Professeur `a l’Universit´e Claude Bernard Lyon 1, ainsi que Monsieur Joseba Quevedo, Professeur `a l’Universitat Polit`ecnica de Catalunya, Barcelone, qui ont accept´e de juger ce travail et d’en ˆetre les rapporteurs. Je tiens ´egalement remercier Monsieur Luc Dugard, Professeur au Laboratoire d’Automatique de l’Institut National Poly-technique de Grenoble, d’avoir accept´e de pr´esider le jury de cette th`ese.
Je remercie tous les membres de l’´equipe TRANSCAN : Pierre-Olivier (POM), Jean-Pierre, Pierre-Yves, Jos´e, ainsi que tous les th´esards et stagiaires pour leur amiti´e et soutien.
Merci `a Audrey, G´eraldine, Marjorie, Annabelle, Magida, David, Gaston, William’s, Nicolas, Thomas, Fr´ed´eric et `a tous les coll`egues et amis du Cemagref de Montpellier pour la sympathie et l’amiti´e qu’ils m’ont t´emoign´ees.
Merci `a mes parents et `a ma sœur Nia pour leurs encouragements et soutien pendant ces ann´ees de th`ese. Merci de croire en moi.
Merci `a Carsten pour sa gentillesse, sa compr´ehension, sa patience, ses encouragements et son soutien. CemOA : archive ouverte d'Irstea / Cemagref
CemOA
: archive
Table des figures x
Liste des tableaux xiv
Chapitre 1 Introduction 1
1.1 ”L’eau - une denr´ee rare, ´epuisable et extrˆemement pr´ecieuse...” [Had00]. . . 1
1.2 Gestion efficiente de l’eau en irrigation . . . 1
1.3 Cas des canaux d’irrigation . . . 2
1.4 Les diff´erentes m´ethodes de distribution de l’eau dans les canaux d’irrigation . . 2
1.5 Pourquoi automatiser ? . . . 3
1.6 Commande automatique d’un canal d’irrigation . . . 3
1.6.1 Variables de contrˆole, variables contrˆol´ees et variables mesur´ees pour les canaux d’irrigation . . . 4
1.6.2 Logique de commande . . . 5
1.6.3 L’architecture de mise en œuvre . . . 6
1.6.4 La m´ethode de synth`ese . . . 7
1.7 Contexte et objectifs de la th`ese . . . 8
1.7.1 Objectifs de la th`ese . . . 9
1.7.1.1 Objectifs de mod´elisation . . . 9
1.7.1.2 Objectifs de contrˆole . . . 10
1.8 Organisation du m´emoire de th`ese . . . 12
Chapitre 2 Mod´elisation d’un canal d’irrigation 13 2.1 Etat de l’art sur les mod`eles de canaux d’irrigation . . . 13
2.2 Choix de mod`ele . . . 16
2.2.1 Mod`ele complet non lin´eaire . . . 17
2.2.1.1 Equations de Saint Venant . . . .´ 17
2.2.1.2 Equations d’ouvrages . . . 18
2.2.2 Mod`ele complet lin´eaire . . . 19
CemOA
: archive
ouverte
d'Irstea
2.2.3 Repr´esentation du mod`ele complet sous forme de matrice de transfert . . 21
2.2.3.1 Solution exacte dans le cas uniforme . . . 22
2.2.3.2 Solution num´erique dans le cas g´en´eral . . . 23
2.2.4 Matrice d’interconnection . . . 23
2.2.5 Calcul du retard en r´egime uniforme . . . 25
2.2.6 Calcul du retard en r´egime non-uniforme . . . 26
2.3 Mod`eles issus de l’analyse fr´equentielle . . . 26
2.3.1 Mod`ele Int´egrateur Retard . . . 26
2.3.2 Caract´eristiques du mod`ele Int´egrateur Retard Z´ero (IRZ) [LF04a] . . . . 27
2.4 Mod´elisation du canal exp´erimental d’´Evora . . . 28
2.4.1 Comparaison des r´eponses fr´equentielles . . . 30
2.5 Mod´elisation du canal de Gignac . . . 32
2.5.1 Analyse des mod`eles fr´equentiels pour le canal de Gignac . . . 33
2.5.2 Analyse des mod`eles analytiques pour le canal de Gignac . . . 38
2.5.3 Comparaison de mod`eles pour un r´egime de fonctionnement donn´e . . . . 39
2.6 Conclusion . . . 41
Chapitre 3 Commande robuste d’un syst`eme mono-bief 43 3.1 Propri´et´es du syst`eme nominal . . . 43
3.1.1 Stabilit´e nominale . . . 43
3.1.2 Performance nominale . . . 44
3.2 Robustesse des syst`emes . . . 45
3.3 Outils pour l’analyse de la robustesse des syst`emes . . . 45
3.3.1 Fonctions de sensibilit´e . . . 45
3.3.1.1 Objectifs de performance . . . 46
3.3.2 Marges de robustesse . . . 47
3.3.3 Normes matricielles . . . 48
3.3.3.1 Valeurs singuli`eres d’une matrice de transfert . . . 48
3.3.3.2 Norme H2 d’une matrice de transfert . . . 49
3.3.3.3 Norme H∞ d’une matrice de transfert . . . 49
3.3.4 Robustesse face `a des incertitude structur´ees . . . 50
3.4 Architectures de r´egulation . . . 52
3.4.1 Contrˆole aval distant d’un canal mono-bief . . . 52 3.4.1.1 Limitation de la performance de la r´egulation par l’aval distant . 54
CemOA
: archive
ouverte
d'Irstea
3.4.1.2 Calcul des fonctions de sensibilit´e et de la valeur singuli`ere
maxi-male pour un contrˆole aval distant . . . 54
3.4.2 Contrˆole amont local d’un canal mono-bief . . . 54
3.4.2.1 Calcul des fonctions de sensibilit´e et de la valeur singuli`ere maxi-male pour un contrˆole amont local . . . 55
3.4.3 Contrˆole mixte d’un canal mono-bief . . . 56
3.4.3.1 Calcul des fonctions de sensibilit´e et de la valeur singuli`ere maxi-male pour un contrˆole mixte . . . 58
3.4.3.2 Analyse de robustesse d’un contrˆoleur mixte face `a des incerti-tudes structur´ees . . . 61
3.4.3.3 Valeur singuli`ere structur´ee de ˆTei . . . 61
3.4.3.4 Valeur singuli`ere structur´ee de ˆSei . . . 63
3.5 M´ethodes de calage de contrˆoleurs de type PID . . . 63
3.5.1 M´ethode de calage analytique directe (SIMC) . . . 64
3.5.2 M´ethode de calage automatique (Auto Tuning Variation) . . . 66
3.5.3 M´ethode de calage pour des contrˆoleurs en cascade . . . 67
3.6 Mise en œuvre exp´erimentale d’un contrˆoleur PI aval distant . . . 69
3.6.1 Mod`ele pour le calage des contrˆoleurs PI aval distant . . . 69
3.6.2 Robustesse des contrˆoleurs cal´es . . . 70
3.6.3 Validation exp´erimentale . . . 74
3.7 Contrˆoleurs PI pour le canal de Gignac . . . 77
3.7.1 Contrˆole aval distant d’un bief du canal de Gignac . . . 79
3.7.1.1 Robustesse des contrˆoleurs PI monovariables aval distant . . . . 79
3.7.1.2 Simulations temporelles . . . 82
3.7.2 Contrˆole amont local d’un bief du canal de Gignac . . . 87
3.7.2.1 Robustesse des contrˆoleurs PI amont local . . . 87
3.7.2.2 Simulations temporelles . . . 89
3.7.3 Contrˆole mixte d’un bief du canal de Gignac . . . 92
3.7.3.1 Robustesse des contrˆoleurs PI mixtes . . . 93
3.7.3.2 Simulations temporelles . . . 95
3.8 Mise en œuvre exp´erimentale d’une commande aval distant pour le canal de Gignac 98 3.9 Conclusion . . . 99
Chapitre 4 Commande robuste d´ecentralis´ee d’un syst`eme multi-biefs 101 4.1 Choix de variable de contrˆole . . . 101
4.2 M´ethode d’inversion de l’´equation de vanne . . . 103
4.3 Commande aval distant d´ecentralis´ee de deux biefs en s´erie . . . 104
CemOA
: archive
ouverte
d'Irstea
4.3.3 Pr´e-commande . . . 107
4.4 Commande amont local d´ecentralis´ee de deux biefs en s´erie . . . 110
4.4.1 Analyse de la stabilit´e et de la performance . . . 110
4.4.2 Pr´e-commande . . . 111
4.5 Contrˆole mixte d´ecentralis´e de deux biefs en s´erie . . . 112
4.5.1 Analyse de la stabilit´e et de la performance . . . 113
4.5.2 Pr´e-commande . . . 115
4.6 Mise en œuvre exp´erimentale de contrˆoleurs pour le canal d’´Evora . . . 115
4.6.1 Commande aval distant de deux biefs en s´erie sans l’utilisation d’une pr´e-commande . . . 116
4.6.2 Commande aval distant de deux biefs en s´erie avec l’utilisation d’une pr´e-commande . . . 117
4.7 Synth`ese de contrˆoleurs PI pour deux biefs en s´erie du canal de Gignac . . . 118
4.7.1 Commande aval distant d´ecentralis´ee de deux biefs en s´erie du canal de Gignac . . . 118
4.7.1.1 Simulations temporelles . . . 118
4.7.2 Commande amont local d´ecentralis´ee de deux biefs en s´erie du canal de Gignac . . . 121
4.7.2.1 Simulations temporelles . . . 121
4.7.3 Commande mixte d´ecentralis´ee de deux biefs en s´erie du canal de Gignac 122 4.7.3.1 Simulations temporelles . . . 123
4.8 Conclusion . . . 127
Chapitre 5 Conclusion g´en´erale et perspectives 129 5.1 Perspectives . . . 131
5.1.1 Mod´elisation . . . 131
5.1.2 Contrˆole . . . 132
5.1.2.1 Contrˆoleurs PID . . . 132
5.1.2.2 Contrˆoleurs H∞ . . . 132
5.1.2.3 Calcul de la pr´e-commande . . . 132
5.1.3 Mise en œuvre pratique de la m´ethodologie int´egr´ee . . . 132 Annexe A M´ethode de lin´earisation des ´equations de Saint Venant 133
Bibliographie 135 CemOA : archive ouverte d'Irstea / Cemagref
1.1 Le canal principal . . . 2
1.2 Vue longitudinale d’un canal d’irrigation . . . 4
1.3 Bief de commande . . . 5
1.4 Canal de Gignac . . . 9
2.1 Un tron¸con de canal et section transversale . . . 17
2.2 La matrice de transfert . . . 23
2.3 Un bief avec une section singuli`ere . . . 24
2.4 Un bief . . . 27
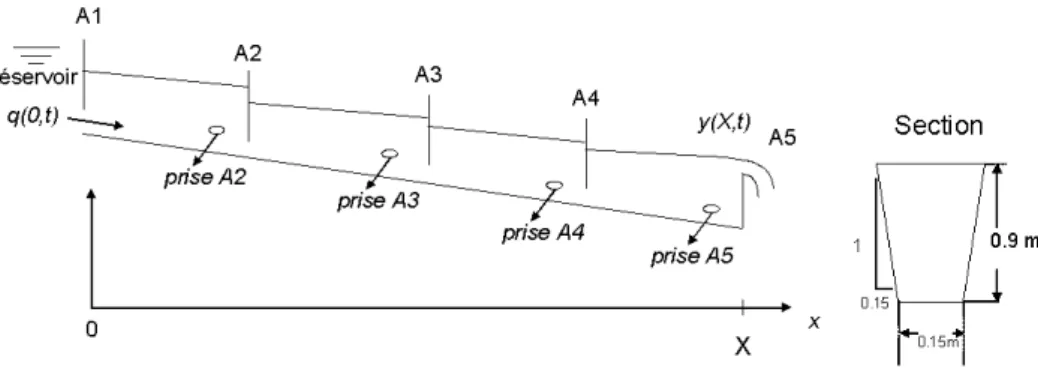
2.5 Canal exp´erimental d’´Evora . . . 29
2.6 Repr´esentation sch´ematique et g´eom´etrie du canal d’´Evora . . . 29
2.7 Vue longitudinale du canal d’´Evora . . . 30
2.8 Deux biefs de commande en s´erie du canal d’´Evora . . . 30
2.9 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’ (IRZ) (-.-) pour le bief 1 du canal d’´Evora . . . 31
2.10 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’ (IRZ) (-.-) pour le bief 2 du canal d’´Evora . . . 31
2.11 Comparaison : transferts p21(s) et p22(s) ’exacts’(-) et ’approch´es’ (IRZ)(-.-) pour le canal d’´Evora entier . . . 31
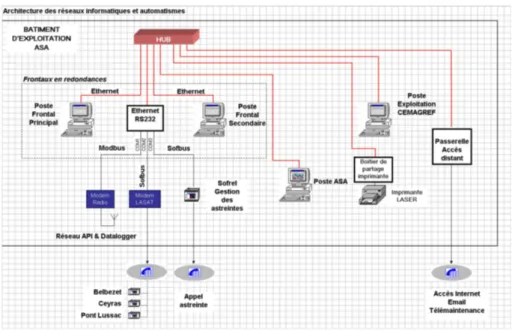
2.12 Poste de supervision de l’ASA de Gignac. . . 33
2.13 Biefs de commande du canal de Gignac . . . 34
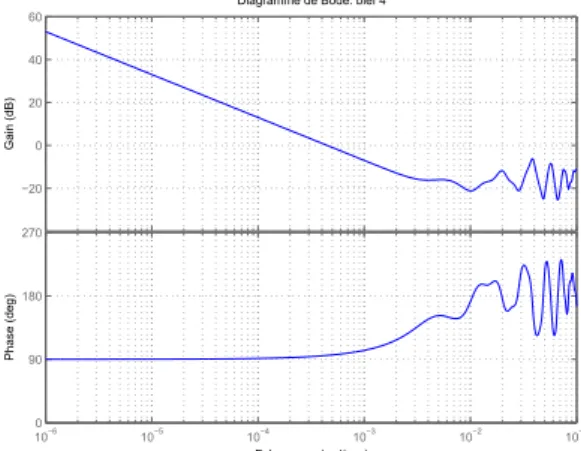
2.14 transfert p21(s) pour le bief 4 du canal de Gignac et pour Q = 0, 96m3/s . . . 35
2.15 transfert p22(s) pour le bief 4 du canal de Gignac et pour Q = 0, 96m3/s . . . 35
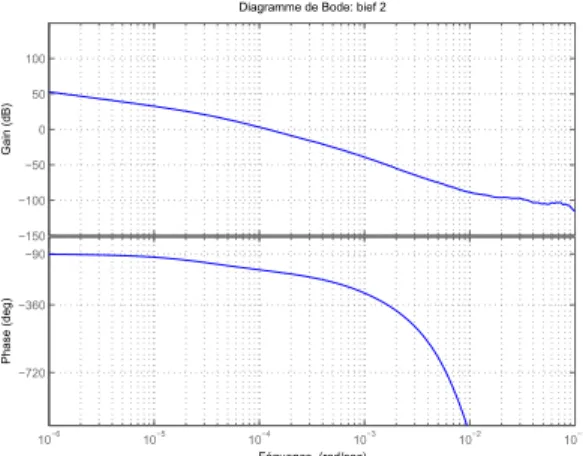
2.16 transfert p21(s) pour le bief 2 du canal de Gignac et pour Q = 0, 96m3/s . . . 36
2.17 transfert p22(s) pour le bief 2 du canal de Gignac et pour Q = 0, 96m3/s . . . 36
2.18 transfert p21(s) pour le bief 1 du canal de Gignac et pour Q = 0, 96m3/s . . . 37
2.19 transfert p22(s) pour le bief 1 du canal de Gignac et pour Q = 0, 96m3/s . . . 37
2.20 transfert p21(s) pour le bief 3 du canal de Gignac et pour Q = 0, 96m3/s . . . 37
2.21 transfert p22(s) pour le bief 3 du canal de Gignac et pour Q = 0, 96m3/s . . . 37
2.22 transferts p21(s) pour le bief 3 du canal de Gignac : bief entier (-), parties de l’aval vers l’amont ( :,-.,–) . . . 38
2.23 transferts p22(s) pour le bief 3 du canal de Gignac : bief entier (-), parties de l’aval vers l’amont ( :,-.,–) . . . 38
2.24 transfert p21(s) pour le bief 1 du canal de Gignac pour Q = 0, 48m3/s(..), Q = 0, 87m3 /s(-.-), Q = 1, 35m3/s(- -) et Q = 2, 27m3/s(-) . . . . 40
2.25 transfert p22(s) pour le bief 1 du canal de Gignac pour Q = 0, 48m3/s(..), Q = 0, 87m3 /s(-.-), Q = 1, 35m3/s(- -) et Q = 2, 27m3/s(-) . . . . 40 CemOA : archive ouverte d'Irstea / Cemagref
.-), Q = 1, 27m3/s(- -) et Q = 2, 33m3/s(-) . . . . 40
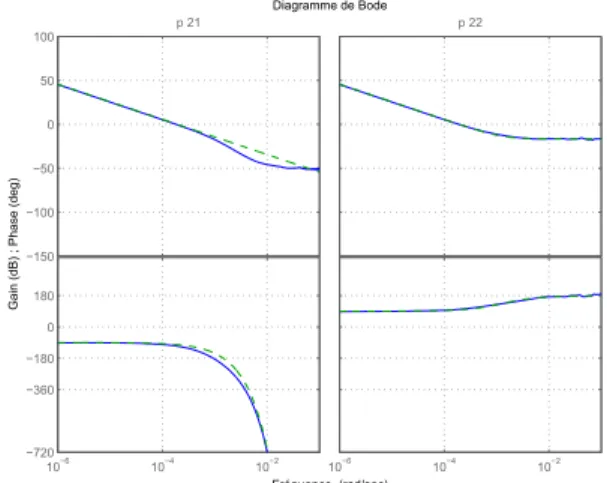
2.28 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’(-.-) pour le bief de commande 1 du canal de Gignac . . . 41
2.29 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’(-.-) pour le bief de commande 2 du canal de Gignac . . . 41
2.30 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’(-.-) pour le bief de commande 3 du canal de Gignac . . . 42
2.31 Comparaison : transferts p21(s) et p22(s) ’exacts’ (-) et ’approch´es’(-.-) pour le bief de commande 4 du canal de Gignac . . . 42
3.1 Sch´ema de r´egulation . . . 44
3.2 Sch´ema-bloc d’un syst`eme boucl´e avec perturbations en entr´ee et en sortie . . . . 46
3.3 Marges de gain, de phase et de module dans le plan de Nyquist . . . 47
3.4 Syst`eme avec incertitudes de mod´elisation . . . 50
3.5 Syst`eme avec incertitudes de mod´elisation . . . 50
3.6 Contrˆole aval distant d’un bief . . . 52
3.7 Boucle ferm´ee : Contrˆole aval distant . . . 53
3.8 R´egulation par l’amont local d’un bief . . . 55
3.9 Boucle ferm´ee : r´egulation par l’amont local . . . 55
3.10 R´egulation mixte d’un bief . . . 56
3.11 Boucle ferm´ee : r´egulation mixte . . . 57
3.12 Architecture cascade avec deux commandes (ui et ui+1) pour contrˆoler une sortie yi . . 58
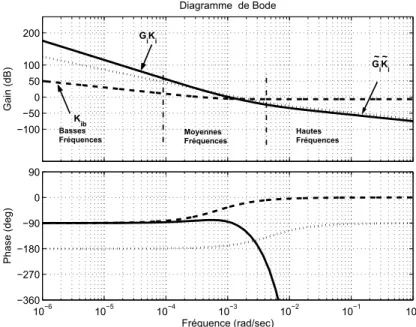
3.13 Les gains des boucles du contrˆoleur mixte : Kib(- -), GiKi(-), ˜GiK˜i (. .) . . . 59
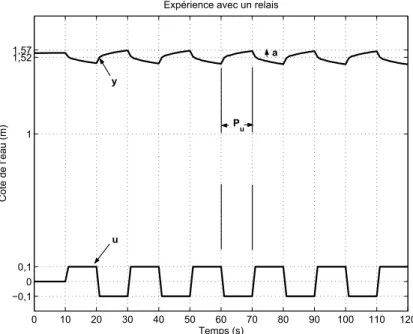
3.14 Syst`eme boucl´e avec un relais . . . 66
3.15 R´eponse du syst`eme lors d’un test ATV . . . 67
3.16 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le premier bief du canal d’´Evora. . . 72
3.17 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le premier bief du canal d’´Evora. . . 72
3.18 Boucle ferm´ee avec le contrˆoleur pour les diff´erents d´ebits : 15 `a 80 l/s pour le premier bief du canal d’´Evora . . . 72
3.19 Rejet de perturbation pour les diff´erents d´ebits : 15 `a 80 l/s pour le premier bief du canal d’´Evora . . . 72
3.20 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le deuxi`eme bief du canal d’´Evora. . . 75
3.21 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le deuxi`eme bief du canal d’´Evora. . . 75
3.22 Boucle ferm´ee avec le contrˆoleur pour les diff´erents d´ebits : 15 `a 80 l/s pour le deuxi`eme bief du canal d’´Evora . . . 75
3.23 Rejet de perturbation pour les diff´erents d´ebits : 15 `a 80 l/s pour le deuxi`eme bief du canal d’´Evora. . . 75
3.24 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le canal entier d’´Evora 76 3.25 Boucle ouverte avec le contrˆoleur pour des d´ebits de 15 `a 80 l/s pour le canal entier d’´Evora 76 3.26 Boucle ferm´ee avec le contrˆoleur pour les diff´erents d´ebits : 15 `a 80 l/s pour le canal entier d’´Evora . . . 76 CemOA : archive ouverte d'Irstea / Cemagref
3.27 Rejet de perturbation pour les diff´erents d´ebits : 15 `a 80 l/s pour le canal entier d’´Evora 76 3.28 Contrˆole aval distant pour le canal entier d’´Evora : comparaison de la r´eponse
exp´erimentale (-) et la simulation lin´eaire (-.-) pour Q = 45 l/s . . . 77
3.29 Sch´ema de la partie du canal de Gignac utilis´ee pour la commande . . . 78
3.30 Boucle ouverte, contrˆole aval distant : bief 1 du canal de Gignac pour diff´erents d´ebits . 80 3.31 Boucle ouverte, contrˆole aval distant : bief 1 du canal de Gignac pour diff´erents d´ebits . 80 3.32 Boucle ouverte, contrˆole aval distant : bief 2 du canal de Gignac pour diff´erents d´ebits . 81 3.33 Boucle ouverte, contrˆole aval distant : bief 2 du canal de Gignac pour diff´erents d´ebits . 81 3.34 Contrˆole aval distant du bief 1 du canal de Gignac sans report . . . 83
3.35 Contrˆole aval distant du bief 1 du canal de Gignac avec report . . . 83
3.36 Test 1 (Suivi de consigne). Contrˆole aval distant sans report : bief 1 du canal de Gignac 84 3.37 Test 1 (Suivi de consigne). Contrˆole aval distant avec report : bief 1 du canal de Gignac 84 3.38 Test 1 (Rejet de perturbation). Contrˆole aval distant sans report : bief 1 du canal de Gignac 85 3.39 Test 1 (Rejet de perturbation). Contrˆole aval distant avec report : bief 1 du canal de Gignac 85 3.40 Test 2 (Suivi de consigne). Contrˆole aval distant sans report : bief 2 du canal de Gignac 86 3.41 Test 2 (Suivi de consigne). Contrˆole aval distant avec report : bief 2 du canal de Gignac 86 3.42 Test 2 (Rejet de perturbation). Contrˆole aval distant sans report : bief 2 du canal de Gignac . . . 87
3.43 Test 2 (Rejet de perturbation). Contrˆole aval distant avec report : bief 2 du canal de Gignac . . . 87
3.44 Boucle ouverte, contrˆole amont local : bief 1 du canal de Gignac pour diff´erents d´ebits . 88 3.45 Boucle ouverte, contrˆole amont local : bief 1 du canal de Gignac pour diff´erents d´ebits . 88 3.46 Boucle ouverte, contrˆole amont local : bief 2 du canal de Gignac pour diff´erents d´ebits . 89 3.47 Boucle ouverte, contrˆole amont local : bief 2 du canal de Gignac pour diff´erents d´ebits . 89 3.48 Test 3 (Suivi de consigne). Contrˆole amont local : bief 1 du canal de Gignac . . . 90
3.49 Test 3 (Rejet de perturbation). Contrˆole amont local : bief 1 du canal de Gignac . . . . 90
3.50 Test 4 (Suivi de consigne). Contrˆole amont local : bief 2 du canal de Gignac . . . 91
3.51 Test 4 (Rejet de perturbation). Contrˆole amont local : bief 2 du canal de Gignac . . . . 91
3.52 Boucle ouverte, contrˆole mixte (PI lent) : bief 1 du canal de Gignac . . . 94
3.53 Boucle ouverte, contrˆole mixte (PI lent) : bief 1 du canal de Gignac . . . 94
3.54 Boucle ouverte, contrˆole mixte (PI lent) : bief 2 du canal de Gignac . . . 94
3.55 Boucle ouverte, contrˆole mixte (PI lent) : bief 2 du canal de Gignac . . . 94
3.56 Test 5 (Suivi de consigne). Contrˆole mixte : bief 1 du canal de Gignac . . . 96
3.57 Test 5 (Rejet de perturbation). Contrˆole mixte : bief 1 du canal de Gignac . . . 96
3.58 Test 6 (Suivi de consigne). Contrˆole mixte : bief 2 du canal de Gignac . . . 97
3.59 Test 6 (Rejet de perturbation). Contrˆole mixte : bief 2 du canal de Gignac . . . 97
3.60 Suivi de consigne. Contrˆole aval distant du bief 1 du canal de Gignac avec report 99 4.1 Deux biefs en s´erie . . . 102
4.2 Contrˆole aval distant d´ecentralis´e de deux biefs en s´erie . . . 105
4.3 Contrˆole aval distant d´ecentralis´e avec une pr´e-commande de deux biefs en s´erie 108 4.4 Contrˆole amont local d´ecentralis´e de deux biefs en s´erie . . . 110
4.5 Contrˆole amont local d´ecentralis´e avec une pr´e-commande de deux biefs en s´erie 111 4.6 Syst`eme de deux biefs en s´erie avec deux contrˆoleurs mixtes . . . 112
4.7 Canal d’´Evora : contrˆole aval distant de deux biefs en s´erie : r´esultats exp´erimen-taux (-) et simulations lin´eaires (-.-) . . . 116
4.8 Canal d’´Evora : contrˆole aval distant de deux biefs en s´erie avec une pr´e-commande : r´esultats exp´erimentaux (-) et simulations lin´eaires (-.-) . . . 117
CemOA
: archive
ouverte
d'Irstea
de commande KF = 0.5 . . . 120
4.11 Test 7 (Rejet de perturbation). Contrˆole aval distant de deux biefs en s´erie avec report
de commande KF = 1 . . . 120
4.12 Test 7 (Rejet de perturbation). Contrˆole aval distant de deux biefs en s´erie avec report
de commande KF = (0.1τ s+1)1+τ s 2 . . . 120
4.13 Test 8 (Rejet de perturbation). Contrˆole multivariable amont local : bief 1 et bief 2 en
s´erie sans report . . . 122
4.14 Test 8 (Rejet de perturbation). Contrˆole multivariable amont local : bief 1 et bief 2 avec
report de commande statique KF = 1 . . . 122
4.15 Test 9 (Rejet de perturbation). Contrˆole mixte de deux biefs en s´erie sans report de
commande amont. . . 124
4.16 Test 9 (Rejet de perturbation). Contrˆole mixte de deux biefs en s´erie avec report de
commande amont KF = e−τ2s . . . 124
4.17 Test 9 (Rejet de perturbation). Contrˆole mixte de deux biefs en s´erie sans report de
commande aval . . . 124
4.18 Test 9 (Rejet de perturbation). Contrˆole mixte de deux biefs en s´erie avec report de
commande aval KF = 1 . . . 124
4.19 Test 9 (Rejet de perturbation). Contrˆole mixte de deux biefs en s´erie avec report de
commande amont et aval . . . 126
CemOA
: archive
ouverte
d'Irstea
2.1 Param`etres du mod`ele IRZ pour le d´ebit de r´ef´erence Q = 45 l/s . . . 32
2.2 Fr´equences de r´esonance pour le bief 4 du canal de Gignac . . . 35
2.3 Fr´equences de r´esonance pour le bief 2 du canal de Gignac . . . 36
2.4 Fr´equences de r´esonance pour le bief 3 du canal de Gignac . . . 39
2.5 Param`etres des mod`eles IRZ pour le bief 1 du canal de Gignac pour diff´erents d´ebits . . . 39
2.6 Variation des retards pour le bief 3 du canal de Gignac pour diff´erents d´ebits . . 40
3.1 R`egles de calage SIMC pour des contrˆoleurs PID . . . 66
3.2 Coefficients des contrˆoleurs PI aval distant pour le canal d’´Evora . . . 70
3.3 Marges de gain et de phase pour diff´erents d´ebits . . . 71
3.4 Crit`eres de performance pour le bief 1 du canal d’´Evora . . . 73
3.5 Crit`eres de performance pour le bief 2 du canal d’´Evora . . . 73
3.6 Crit`eres de performance pour le canal entier d’´Evora . . . 74
3.7 R´egime de fonctionnement hydraulique du canal de Gignac . . . 78
3.8 PI aval distant : marges de gain et de phase pour le bief 1 du canal de Gignac . . 80
3.9 PI aval distant : marges de gain et de phase pour le bief 2 du canal de Gignac . . 80
3.10 Param`etres du mod`ele approch´e pour le bief 1 du canal de Gignac . . . 82
3.11 Param`etres du mod`ele approch´e pour le bief 2 du canal de Gignac . . . 82
3.12 PI amont local : marges de gain et de phase pour le bief 1 du canal de Gignac . . 88
3.13 PI amont local : marges de gain et de phase pour le bief 2 du canal de Gignac . . 88 3.14 PI mixte (lent) : marges de gain et de phase pour le bief 1 du canal de Gignac . 93 3.15 PI mixte (lent) : marges de gain et de phase pour le bief 2 du canal de Gignac . 94
CemOA
: archive
ouverte
d'Irstea
CemOA
: archive
Introduction
1.1
”L’eau - une denr´
ee rare, ´
epuisable et extrˆ
emement pr´
e-cieuse...” [Had00].
Au cours de ces derni`eres d´ecennies, les probl`emes relatifs `a la protection et `a l’utilisation du-rable des ressources en eau se sont accentu´es dans le monde. Les probl`emes d’eau affectent aussi bien des pays d´evelopp´es que des pays aux ressources ´economiques limit´ees. Nombre de pays en Europe et dans le monde ne disposent pas de ressources suffisantes en eau douce. Les probl`emes d’eau sont imputables tant `a la croissance de la population, `a la surexploitation qu’`a une gestion irrationnelle des ressources. Selon le rapport mondial des Nations Unies (World Water Deve-lopment Report) pour la mise en valeurs des ressources en eau, les besoins en eau augmentent rapidement et se r´epartissent ainsi : 70 `a 80% pour l’irrigation, moins de 20% pour l’industrie et seulement 6% pour la consommation m´enag`ere. Vers 2015, environ 40% de la population mondiale estim´ee, vivra dans des pays o`u il sera difficile ou impossible de trouver suffisamment d’eau pour satisfaire les besoins nutritionnels, industriels et m´enagers [Vel04], [GW03].
L’agriculture est, par nature, l’utilisateur le plus important de ressource en eau - elle repr´e-sente environ trois quart de la consommation en eau mondiale. C’est dans ce domaine que les ´economies les plus importantes peuvent sans doute ˆetre obtenues en am´eliorant la gestion des syst`emes d’irrigation [Had00].
1.2
Gestion efficiente de l’eau en irrigation
Dans le contexte d’une augmentation des besoins en eau et l’amenuisement de la ressource disponible, il est n´ecessaire de g´erer l’eau en irrigation de fa¸con efficiente. On peut donner diff´erentes d´efinitions du mot efficience. Cet anglicisme veut dire capacit´e de rendement, per-formance. Selon la d´efinition ISO9000/2000 c’est la “relation entre le r´esultat obtenu et les ressources utilis´ees”.
En irrigation, l’efficience selon les ´economistes est d´efinie de diff´erentes mani`eres suivant le contexte d’utilisation du terme : [Lou99], [Mon97] :
• efficience technique : caract´erise la relation entre la quantit´e d’eau utilis´ee lors de l’ir-rigation et les rendements
CemOA
: archive
ouverte
d'Irstea
• efficience productive : relative `a la fa¸con dont l’eau est utilis´ee pour la production de la mˆeme culture mais en utilisant diff´erentes m´ethodes d’irrigation (irrigation gravitaire, goutte-`a-goutte, par aspersion...)
• efficience allocative : exprime la mani`ere dont l’eau est distribu´ee entre diff´erents sec-teurs de production : agriculture, industrie, consommation urbaine
• efficience distributive : li´ee aux probl`emes de l’´equit´e de distribution entre les diff´erents utilisateurs
Parmi les syst`emes hydrauliques `a surface libre servant `a la distribution de l’eau pour l’ir-rigation, on va ´etudier le cas des canaux d’irrigation. On va parler de la gestion efficiente d’un canal d’irrigation dans le sens d’une efficience technique et d’une efficience distributive. On va s’int´eresser `a une solution possible pour ´economiser de l’eau (augmenter l’efficience technique) en mˆeme temps que satisfaire la demande en eau des utilisateurs (avoir une bonne efficience distributive).
1.3
Cas des canaux d’irrigation
Les canaux d’irrigation sont des syst`emes qui servent `a conduire l’eau de sa source (une rivi`ere, un barrage) vers ses utilisateurs (station de pompage, parcelles agricoles). Souvent `a part le canal principal, il y a des canaux secondaires et tertiaires, ainsi que diff´erents ouvrages de r´egulation (des vannes, des seuils...) (voir figure 1.1).
Fig. 1.1 – Le canal principal
Il y a plusieurs composantes qui interviennent dans la gestion d’un canal d’irrigation : tech-niques, financi`eres, socio-´economiques et politiques [Mal94b].
On va se limiter dans cette th`ese `a l’´etude des composantes techniques de la gestion d’un canal d’irrigation et plus pr´ecis´ement `a la m´ethode de gestion du canal principal.
1.4
Les diff´
erentes m´
ethodes de distribution de l’eau dans les
canaux d’irrigation
Il existe diff´erentes m´ethodes de distribution de l’eau aux usagers. La plupart des canaux d’irrigation traditionnels sont g´er´es au tour d’eau. La modernisation des canaux d’irrigation vise une am´elioration de la gestion de l’eau traditionnelle et un passage vers une distribution `a la
CemOA
: archive
ouverte
d'Irstea
demande. On verra par la suite quels sont les avantages de la distribution `a la demande en faisant une comparaison entre la distribution ”au tour d’eau” et la distribution ”`a la demande”.
• Distribution au tour d’eau
Dans le cas d’une distribution ”au tour d’eau”, l’eau est donn´ee tour `a tour d’un usager `a l’autre selon un horaire pr´e´etabli et chaque usager peut disposer d’une quantit´e maximale d’eau dans un intervalle fix´e, mˆeme s’il n’en a pas r´eellement besoin. Ce mode de distribu-tion est fortement inefficace et rigide `a cause de la distribudistribu-tion non-optimale de l’eau (les plantes ne sont pas toujours irrigu´ees au meilleur moment). Faire distribuer l’eau suivant un sch´ema pr´e-´etabli est relativement simple pour le gestionnaire, mais assez contraignant en terme de temps pour les usagers [Mal94b].
• Distribution `a la demande
A la diff´erence de la distribution ”au tour d’eau”, la distribution ”`a la demande” permet aux usagers de pr´elever l’eau lorsqu’ils le d´esirent sans faire une demande au pr´ealable. Une distribution ”`a la demande” implique de disposer de l’eau en un point donn´e, en quantit´e et en temps voulus par l’usager. Cette m´ethode permettra donc une meilleure qualit´e de service, car elle n’impose pas de contraintes temporelles aux usagers. De plus, elle donne la possibilit´e d’´economiser la ressource, car les usagers ne pr´el`everont que la quantit´e n´e-cessaire d’eau.
Passer d’une distribution au tour d’eau vers une distribution `a la demande n’est pas ´evident, car ceci n´ecessite d’importants investissements pour la mise au point de techniques modernes de gestion et d’automatisation des ouvrages de r´egulation.
Cependant, il s’av`ere qu’une automatisation serait une solution prometteuse dans le but d’une gestion plus efficiente d’un canal d’irrigation.
1.5
Pourquoi automatiser ?
Les ´etudes montrent que l’efficience (en terme de quantit´e d’eau apport´ee `a la plante par rapport `a la quantit´e d’eau pr´elev´ee sur le milieu naturel) est de 70 % et plus pour les canaux automatis´es contre 30% `a 40% pour ceux qui fonctionnent en manuel [Vio03]. L’automatisation d’un canal d’irrigation pr´esente d’importants b´en´efices. Les avantages principaux de l’automa-tisation d’un canal d’irrigation consistent dans l’´economie de l’eau, la diminution de la main d’œuvre, l’utilisation optimale de l’eau disponible, la qualit´e du service, la facilit´e de gestion et d’acquisition d’information (Baudequin et al. dans [FV78]). Tous ces avantages montrent clairement l’int´erˆet d’une commande automatique des canaux d’irrigation.
Cependant, les travaux de recherche et de d´eveloppement sur l’application de la commande automatique aux syst`emes `a surface libre paraissent limit´es par rapport `a d’autres domaines industriels.
1.6
Commande automatique d’un canal d’irrigation
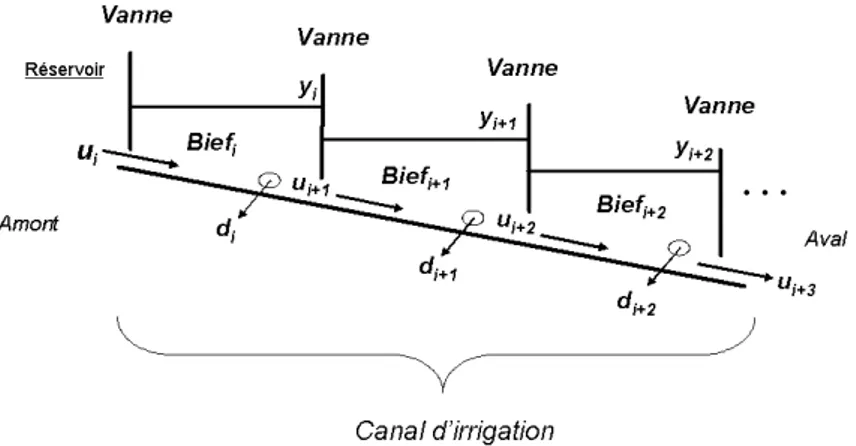
On va ´etudier dans cette th`ese l’application de la commande automatique au canal principal. Le canal principal peut ˆetre repr´esent´e par un sch´ema de mise en s´erie de biefs, chaque bief ´etant la portion de canal entre deux ouvrages de r´egulation (vannes, par exemple). Une vue longitudinale est pr´esent´ee sur la figure 1.2.
CemOA
: archive
ouverte
d'Irstea
Fig. 1.2 – Vue longitudinale d’un canal d’irrigation
Lorsque l’on applique une commande automatique `a un syst`eme quelconque on parle de variables de contrˆole, de variables contrˆol´ees et de variables mesur´ees.
1.6.1 Variables de contrˆole, variables contrˆol´ees et variables mesur´ees pour
les canaux d’irrigation
• Les variables de contrˆole peuvent ˆetre de deux types : ouverture de vanne ou d´ebit `a travers la vanne. Le choix de l’ouverture de la vanne comme variable de contrˆole permet de tenir compte de la dynamique complexe qui relie l’ouverture avec le d´ebit local et les cotes amont et aval. Cette dynamique est prise en compte, par exemple, dans le cas d’une r´egulation de type LQR [Mal94a]. Si la variable de contrˆole est le d´ebit, alors il est pos-sible de d´ecoupler le syst`eme en sous-syst`emes et d’appliquer une commande d´ecentralis´ee [Sch97], [GLG04], [GWLF+05]. Par contre, il faut convertir le d´ebit en ouverture de vanne,
ce qui peut se faire par diff´erentes m´ethodes d’inversion de l’´equation de vanne.
• Les variables contrˆol´ees sur un canal d’irrigation sont des d´ebits ou des cotes. Intuiti-vement on pourrait penser que, comme les usagers ont besoin d’une quantit´e d’eau (d´ebit), les variables contrˆol´ees devraient ˆetre les d´ebits. Cependant, les d´ebits ´etant difficilement mesurables, la r´egulation se fait en g´en´eral en cote. De plus, les prises ´etant gravitaires, leur d´ebit d´epend de la cote dans le canal. Contrˆoler cette cote revient donc `a assurer un d´ebit constant dans la prise.
Les cotes peuvent ˆetre situ´ees en d´ebut (cote amont), en milieux (cote interm´ediaire) et en fin de bief (cote aval).
• Les variables mesur´ees sur un canal d’irrigation sont le plus souvent les cotes. Il existe des cas o`u les variables mesur´ees peuvent ˆetre les d´ebits ou les volumes.
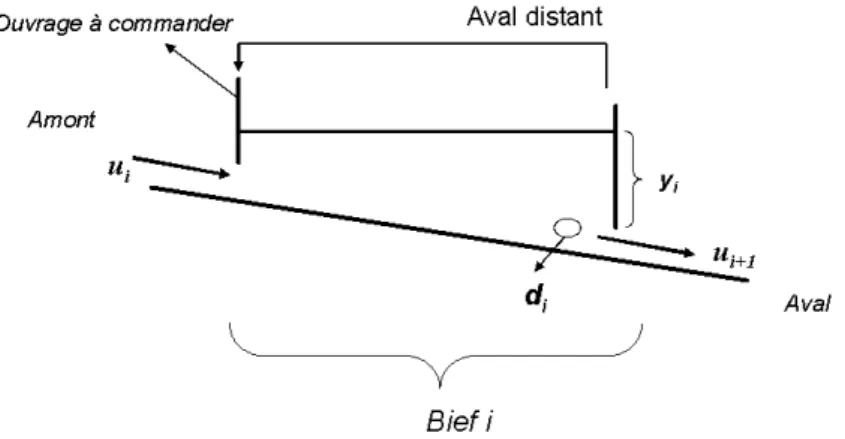
Afin de mieux d´efinir les diff´erentes variables intervenant lors de la commande on se sert du sch´ema simplifi´e d’un seul bief de commande (figure 1.3). Pour le i-`eme bief, la variable ui
repr´esente la variable de contrˆole (le d´ebit) `a l’amont du bief, ui+1 la variable de contrˆole `a
l’aval du bief, yi la variable contrˆol´ee (la cote de l’eau `a l’aval du bief). Dans le cas des canaux
d’irrigation, les prises di (qui caract´erisent l’eau pr´elev´ee par les usagers) `a l’aval de chaque
bief sont consid´er´ees comme des perturbations inconnues et la consigne en cote est d’habitude
CemOA
: archive
ouverte
d'Irstea
Fig. 1.3 – Bief de commande
constante. De point de vue pratique, l’´etude de la capacit´e du contrˆoleur de rejeter les perturba-tions inconnues est beaucoup plus importante que le suivi de consigne, car les prises d’eau sont beaucoup plus fr´equentes que la variation de la consigne.
Par ”commande ” ou ”r´egulation” d’un canal d’irrigation (d’un bief) on sous-entend l’action sur les ouvrages de commande (vannes en travers) dans le but d’obtenir en diff´erents points du canal (du bief), des valeurs d´esir´ees de d´ebits, de niveaux d’eau ou d’autres variables [Bau90]. La classification des types de r´egulation est faite ici suivant la logique de commande, l’architecture de mise en œuvre et la m´ethode de synth`ese.
1.6.2 Logique de commande
• R´egulation (en cote) par l’amont local : la r´egulation par l’amont local (typique pour la distribution ”au tour d’eau”) consiste `a r´eguler la cote aval en agissant sur l’ouvrage de r´egulation qui se trouve `a l’aval du bief. L’avantage de cette m´ethode est qu’elle est performante de point de vue des usagers en terme de rejets de perturbations non-mesur´ees, car elle n’est pas limit´ee par un retard. Par contre, elle est peu ´econome vis `a vis de la ressource, car un d´ebit est assur´e `a l’amont du bief en fonction des besoins pr´evisionnels des usagers.
• R´egulation (en cote) par l’aval distant : la r´egulation par l’aval distant consiste `a r´e-guler la cote `a l’aval d’un bief en agissant sur l’ouvrage de r´egulation se trouvant `a l’amont de celui-ci. Le grand avantage de cette r´egulation c’est la gestion parcimonieuse de la res-source, car on ne pr´el`eve que la quantit´e d’eau demand´ee par les usagers. Cependant, le temps de retard n´ecessaire pour que l’eau arrive de la ressource jusqu’`a l’usager limite la performance (vue par l’usager) en terme de rejet de perturbations (non-mesur´ees) `a l’aval. • R´egulation (en cote) mixte : les d´efinitions pr´ec´edemment donn´ees laissent croire que la r´egulation par l’aval distant serait suffisante pour une distribution de type `a la demande. Ceci n’est pas tout `a fait correct dans le sens o`u le retard entre l’action de l’ouvrage de r´egulation `a l’amont du bief et son effet `a l’aval de celui-ci peut ˆetre tr`es important pour
CemOA
: archive
ouverte
d'Irstea
des biefs tr`es longs et des d´ebits en tˆete faibles. Dans ce cas, la demande en eau des usagers `
a l’aval du bief ne pourrait pas ˆetre satisfaite imm´ediatement (l’eau ne serait pas distribu´ee `
a la demande). Une solution possible dans ce cas sera une r´egulation mixte. Comme son nom l’indique, ce type de r´egulation est la combinaison de la r´egulation par l’amont local et la r´egulation par l’aval distant. La combinaison des avantages des deux m´ethodes de r´egulation, comme on va le voir, serait une solution pertinente vers un compromis entre la gestion ´econome de la ressource et la performance vue par les usagers.
1.6.3 L’architecture de mise en œuvre
Les types de r´egulation suivant l’architecture de mise en œuvre sont d´efinis dans [Gou93] de la mani`ere suivante :
– R´egulation centralis´ee : le syst`eme global est command´e par un poste central ´equip´e d’un ordinateur qui assure le traitement de donn´ees et permet d’appliquer une commande sur le syst`eme. L’avantage de la r´egulation centralis´ee est qu’elle permet de tenir compte de l’´etat et des besoins en eau concernant l’ensemble du canal `a un mˆeme instant. Son inconv´enient est le coˆut de la mise en œuvre, car cette r´egulation fait appel `a des tech-niques complexes (t´el´etransmission) et avanc´ees (ordinateur). De plus, assurer une fiabilit´e de fonctionnement face `a des pannes n´ecessite une redondance d’´equipements comme ali-mentation d’´energie, ordinateur central ou autre.
– R´egulation d´ecentralis´ee : la r´egulation est assur´ee par des dispositifs de commande ind´ependants. Alors, dans le cas des canaux d’irrigation, chaque bief sera command´e par un contrˆoleur local de fa¸con ind´ependante des autres biefs. Puis, le contrˆole du canal en-tier (compos´e de plusieurs biefs en s´erie) sera effectu´e par la concat´enation des contrˆoleurs locaux. Ainsi, une panne survenue sur le dispositif de commande local peut ˆetre facilement d´etect´ee et isol´ee. Donc, les avantages principaux de la r´egulation d´ecentralis´ee sont qu’elle est simple `a mettre en œuvre et que l’impact d’une panne peut ˆetre limit´e. Par contre, le probl`eme de la prise en compte des interactions entre les biefs reste d´elicat. Ces interac-tions doivent ˆetre ´etudi´ees lors de l’analyse de la stabilit´e, la performance et la robustesse du syst`eme global.
Le contrˆole d´ecentralis´e est tr`es souvent appliqu´e aux processus chimiques (colonnes de distillation). La synth`ese de contrˆoleurs d´ecentralis´es pour les canaux d’irrigation a ´et´e ´etudi´ee dans certains travaux de recherche [Sch97], [Sea00] et [Wey02]. Afin de rem´edier aux probl`emes des interactions entre les biefs, Schuurmans et al. dans [SHD+99] proposent l’utilisation d’un d´ecoupleur caract´erisant une pr´e-commande. On verra un peu plus tard comment on g`ere le probl`eme des interactions lors de l’implantation de la commande. – R´egulation d´ecentralis´ee sous contrˆole centralis´e : le principe de cette architecture
repose sur la combinaison d’une r´egulation d´ecentralis´ee avec un dispositif de surveillance et de contrˆole centralis´e. Par rapport `a la r´egulation centralis´ee, la r´egulation d´ecentralis´ee sous contrˆole centralis´e permet une r´eduction de la sensibilit´e aux pannes de transmission (r´eduction du mat´eriel de redondance), ainsi que de la capacit´e du mat´eriel de transmis-sion et de supervitransmis-sion, car seulement une partie des param`etres est transmise et trait´ee. Par rapport `a la r´egulation d´ecentralis´ee, la r´egulation combin´ee offre une grande facilit´e
CemOA
: archive
ouverte
d'Irstea
et sˆuret´e de fonctionnement grˆace `a la supervision centralis´ee.
1.6.4 La m´ethode de synth`ese
Pour la m´ethode de synth`ese utilis´ee en r´egulation des canaux, on distingue les m´ethodes de synth`ese une entr´ee/une sortie (SISO) des m´ethodes de synth`ese multi-entr´ees/multi-sorties (MIMO). On va pr´esenter par la suite une liste des contributions principales concernant les deux m´ethodes de synth`ese. Bien entendu cette liste n’est pas exhaustive.
M´ethodes une entr´ee/une sortie (m´ethodes SISO) Si l’on suit une d´emarche de contrˆole d´ecentralis´e, des contrˆoleurs ind´ependants vont ˆetre synth´etis´es pour chaque sous-syst`eme. Alors, le probl`eme de contrˆole revient `a faire une synth`ese de contrˆoleurs une entr´ee/une sortie (SISO). Par exemple, consid`erons que le sous-syst`eme est un bief de commande du canal d’irrigation et supposons qu’une r´egulation par l’aval distant est appliqu´ee `a ce sous-syst`eme. Ainsi, on aura une variable de contrˆole (une entr´ee), par exemple, le d´ebit `a l’amont du bief, et une variable contrˆol´ee (une sortie), la cote `a l’aval du bief. Le contrˆoleur ind´ependant aura donc une entr´ee (l’erreur entre la consigne de cote et la cote) et une sortie (la commande en d´ebit). La plupart des m´ethodes de contrˆole SISO sont bas´ees sur des contrˆoleurs classiques de type PID : [BMS99], [BMKR98], [LFBR03], [Rij03], [Sch97], [Wey02]. Afin de prendre en compte de fa¸con explicite le retard entre l’amont et l’aval du bief, Shand dans [Sha71] sugg`ere l’utilisation d’un Pr´edicteur de Smith. Plus tard, dans [DS98] et [San97] les auteurs d´eveloppent un contrˆoleur PIR, une combinaison d’un contrˆoleur PI et d’un Pr´edicteur de Smith.
D’autres contrˆoleurs lin´eaires sont obtenus en utilisant la technique de placement de pˆoles [Kos94].
Le contrˆole pr´edictif, qui est en g´en´eral une m´ethode d’optimisation monovariable, est appliqu´e aux canaux d’irrigation par diff´erents auteurs [GRM02], [RGB93], [RGMV89], [Saw92].
Des m´ethodes `a base de logique floue [SM97a, SM97b], [VB97] ou des syst`emes experts (r´eseaux de neurones) [RS95] ont ´et´e d´evelopp´es pour les canaux d’irrigation.
Les diff´erentes m´ethodes SISO appliqu´ees au canaux d’irrigation ne sont pas d´etaill´ees ici, mais leurs avantages et inconv´enients se r´esument comme suit. Le grand int´erˆet des m´ethodes mono-entr´ee/mono-sortie provient du fait qu’elles sont relativement simples `a mettre en œuvre. Les critiques proviennent du fait que le type de synth`ese SISO n´ecessite un d´ecoupage du sys-t`eme multivariable (dans ce cas un canal d’irrigation) en sous-syssys-t`emes monovariables souvent sans prendre en compte explicitement les interactions entre les sous-syst`emes.
M´ethodes multi-entr´ees/multi-sorties (MIMO)
Selon le sch´ema 1.2, le canal d’irrigation peut ˆetre vu comme la mise en cascade de plusieurs biefs avec plusieurs entr´ees et plusieurs sorties. Si la d´emarche de contrˆole est centralis´ee, alors il faut agir sur toutes les entr´ees et toutes les sorties du syst`eme simultan´ement et concevoir un contrˆoleur multi-entr´ees/multi-sorties (MIMO) centralis´e.
Nombreux sont les travaux de recherche concernant les techniques de contrˆole MIMO ap-pliqu´ees aux canaux d’irrigation. Les diff´erents types de contrˆole multivariable peuvent ˆetre ´enum´er´es comme suit :
CemOA
: archive
ouverte
d'Irstea
• Contrˆole `a base de la m´ethode d’inversion de mod`ele : [LFB95], [LFM+98], [Che91] • Commande pr´edictive multivariable : [MR97], [SMNF97]
• Commande l1 : [MK03]
• R´egulateur Lin´eaire Quadratique (LQR) : [BHDV88], [CFSU82], [FM89], [GHDV92], [HDVB87], [Mal94a], [Mal98], [Red96]
• Commande optimale lin´eaire : [OLG03], [Oua04] • Commande optimale non-lin´eaire : [CG99], [Che01] • Lin´earisation Entr´ee-Sortie : [DGB04]
• Commande issue directement des ´equations aux d´eriv´ees partielles : [DHPC+03]
• Commande par mod`ele interne et ´equations aux d´eriv´ees partielles : [DST03] • Commande robuste de type H∞: [LF03], [PG99], [PGFB01], [PG03]
L’avantage du contrˆole MIMO, par rapport aux techniques de synth`ese SISO, est qu’il donne la possibilit´e de prendre en compte naturellement les interactions entre les sous-syst`emes (les biefs). Par contre, les m´ethode MIMO sont beaucoup plus complexes et lourdes `a mettre en œuvre que les m´ethodes SISO.
Mˆeme si les travaux de synth`ese de contrˆoleurs pour les canaux d’irrigation sont nombreux, seulement une petite partie aboutit `a une application de la m´ethodologie propos´ee sur le terrain. La plupart du temps les tests s’arrˆetent aux programmes de simulation. Bien entendu, il est important d’avoir un programme de simulation (du mod`ele avec le contrˆoleur) qui permet de tester les diff´erents sc´enarios de r´egulation avant leur application aux canaux r´eels.
Dans le but de d´evelopper une m´ethodologie de contrˆole utilisable non seulement par des ”automaticiens”, mais aussi par des ”non-automaticiens”, et dans le soucis de l’appliquer en pra-tique, on utilise dans cette th`ese des techniques de synth`ese SISO simples.
Apr`es avoir introduit le contexte g´en´eral de la r´egulation des canaux d’irrigation, on va exposer les questions qu’on traite dans cette th`ese, les objectifs `a atteindre et la m´ethodologie propos´ee.
1.7
Contexte et objectifs de la th`
ese
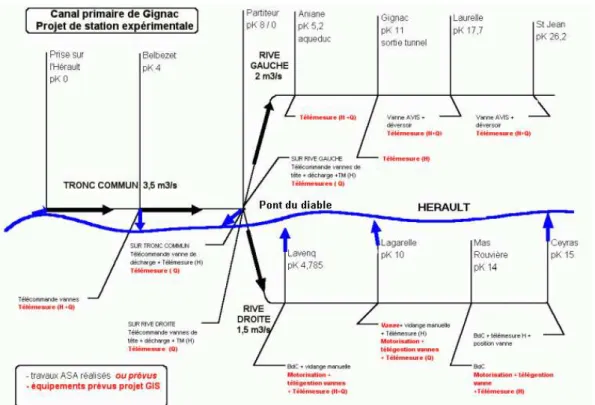
Cette th`ese s’inscrit dans le projet de modernisation d’un canal r´eel, le canal de Gignac. Le canal de Gignac est aliment´e par une prise sur l’H´erault et dessert un p´erim`etre irrigable de 3800 ha. Les eaux pr´elev´ees sont v´ehicul´ees par un canal principal comprenant un tronc commun de 12 km et de deux branches principales en rive gauche et en rive droite du fleuve sur des longueurs respectives de 27 et 15 km (voir figure 1.4). Le Cemagref Montpellier participe en association avec l’ASA(Association Syndicale Autoris´ee) de Gignac au montage d’un projet visant `a faire du canal un ouvrage exp´erimental pour la commande en temps r´eel.
Le projet de modernisation (Plan Etat-R´egion Languedoc-Roussillon) vise entre autre l’au-tomatisation des ouvrages de r´egulation, d’abord sur la rive droite et le tronc commun, puis sur la rive gauche. Un poste de supervision central est mis en place et permet d’agir et d’´emettre des commandes en temps r´eel vers le syst`eme. Nos travaux de recherche concernent la commande robuste des ouvrages automatis´es sur le tronc commun et la rive droite du canal. Les probl`emes de supervision et de d´etection de pannes seront ´etudi´es dans une autre th`ese.
CemOA
: archive
ouverte
d'Irstea
Fig. 1.4 – Canal de Gignac
Par ailleurs, on a eu la possibilit´e d’appliquer la commande automatique robuste sur le canal exp´erimental de l’Universit´e d’´Evora au Portugal. Ce canal exp´erimental est ´equip´e d’ouvrages de r´egulation automatis´es et d’un poste de supervision qui permet d’agir sur le syst`eme. Les exp´eriences ont ´et´e faites dans le cadre du projet de collaboration franco-portugais n◦547-B4
et grˆace au soutien financier de l’ambassade de France en Portugal et GRICES (Gabinete de Rela¸c˜oes Internacionais da Ciˆencia e do Ensino Superior) du Portugal.
1.7.1 Objectifs de la th`ese
L’objectif principal de cette th`ese est l’application de la commande automatique robuste `a un syst`eme `a surface libre. Pour appliquer cette commande il faut d’abord mod´eliser le processus r´eel. On se restreint dans cette th`ese `a une commande simple de type PI. On a donc besoin d’un mod`ele pour la commande qui soit lin´eaire et d’ordre faible.
Une fois le mod`ele trouv´e, il faut ´elaborer une m´ethodologie de contrˆole robuste pour le syst`eme ´etudi´e.
Ainsi, on regroupe les objectifs de cette th`ese selon deux axes : objectifs de mod´elisation et objectifs de contrˆole.
1.7.1.1 Objectifs de mod´elisation
La dynamique des canaux d’irrigation est bien repr´esent´ee par les ´equations de Saint Venant [BdSV71]. Le mod`ele de Saint Venant est la base d’un grand nombre de mod`eles (l’´etat de l’art
CemOA
: archive
ouverte
d'Irstea
sur ces mod`eles est fait dans le chapitre 2) con¸cus pour la commande automatique. On se pro-pose dans cette th`ese d’´etudier les mod`eles d´ej`a existant dans la litt´erature et de choisir celui qui convient au mieux au cahier des charges du pr´esent travail :
1. En vue d’une mise en œuvre pratique de la m´ethodologie de commande automatique, l’objectif est de trouver un mod`ele qui repr´esente au mieux la dynamique d’un canal d’ir-rigation r´eel. Alors, il faut d´efinir les sp´ecificit´es d’un canal r´eel `a prendre en compte pour la construction du mod`ele. En particulier, il est n´ecessaire de tenir compte des ouvrages hydrauliques interm´ediaires. La plupart des mod`eles de canaux d’irrigation ne prennent pas en compte, par exemple, l’existence des vannes et des seuils tout au long du bief. Dans un mod`ele r´ealiste il serait judicieux de consid´erer aussi les ouvrages (vannes, seuils) in-term´ediaires.
2. Afin d’appliquer une commande automatique lin´eaire de type PI, on a besoin d’un mod`ele lin´eaire.
3. Pour pouvoir utiliser des techniques ´eprouv´ees (m´ethodes standards) pour calculer les coef-ficients des contrˆoleurs lin´eaires (par exemple des PID), il est utile de disposer d’un mod`ele analytique. Les mod`eles analytiques approch´es peuvent servir pour le r´eglage initial des contrˆoleurs lin´eaires.
4. Finalement, il faut appliquer la m´ethodologie de mod´elisation pour les deux canaux r´eels (le canal d’´Evora (Portugal) et le canal de Gignac (France)) avec toutes les contraintes de mise en œuvre.
1.7.1.2 Objectifs de contrˆole
Comme on l’a vu plus haut, les variables de contrˆole pour un canal d’irrigation peuvent ˆetre des ouvertures de vannes ou des d´ebits `a travers les vannes. Les variables contrˆol´ees sont des d´ebits ou des cotes. De point de vue pratique, il est plus facile de contrˆoler des cotes. Ainsi, les objectifs de contrˆole sont d´efinis de fa¸con `a :
• assurer la stabilit´e robuste du syst`eme pour diff´erents d´ebits en tˆete (pour plusieurs mo-d`eles du syst`eme diff´erents du mod`ele nominal) ;
• maintenir l’erreur statique suffisamment petite, c’est-`a-dire maintenir la cote contrˆol´ee le plus proche de sa consigne en utilisant comme variable de contrˆole le d´ebit de la vanne1;
• rejeter rapidement les perturbations qui, dans notre cas d’´etude, sont des pr´el`evements de d´ebit `a l’aval des biefs.
A ces objectifs de contrˆole ”classiques”, s’ajoutent les objectifs d’une gestion de l’eau efficiente dans un canal d’irrigation : pr´eserver la ressource en eau (ne pr´elever de la source qu’une quantit´e d’eau stricte n´ecessaire) et en mˆeme temps satisfaire au mieux la demande en eau des usagers.
1le choix de variable de contrˆole est ´etudi´e dans le chapitre 4.
CemOA
: archive
ouverte
d'Irstea
Ces objectifs sont difficiles `a atteindre simultan´ement et n´ecessitent un compromis entre la performance du syst`eme vue par l’usager et l’´economie d’eau. Notre but sera donc d’´etudier les diff´erentes solutions possibles `a travers l’application d’une commande automatique robuste et de proposer une solution r´epondant `a ce compromis.
M´ethodologie Notre but est d’´elaborer une m´ethodologie g´en´erique applicable dans des si-tuations pratiques.
Un canal d’irrigation est un syst`eme multivariable (MIMO) complexe. La d´emarche que l’on propose est bas´ee sur la commande d´ecentralis´ee. Elle n´ecessite le d´ecoupage du syst`eme MIMO en sous-syst`emes SISO, chaque sous-syst`eme ´etant un bief de commande. De cette mani`ere, il est plus facile de concevoir des contrˆoleurs lin´eaires monovariables robustes pour chaque sous-syst`eme monovariable. L’obtention d’un mod`ele lin´eaire pour la commande permet l’utilisation des techniques classiques de l’automatique lin´eaire. Des outils bien d´efinis comme les marges de robustesse (marge de gain, marge de phase,...) ou les trac´es fr´equentiels comme le lieu de Bode ou l’abaque de Nichols permettent d’´evaluer facilement la stabilit´e, la performance et la robus-tesse2 du syst`eme lin´eaire monovariable face `a des erreurs de mod´elisation ou des perturbations
externes.
La m´ethodologie de contrˆole mono-bief est ensuite ´etendue pour un syst`eme multi-biefs. Ce passage d’un syst`eme SISO `a un syst`eme MIMO (un syst`eme de deux biefs en s´erie) implique l’´etude des questions suivantes :
Choix de variable pour le contrˆole d´ecentralis´e : c’est une ´etape particuli`erement importante pour le contrˆole d´ecentralis´e d’un canal d’irrigation, car les non-lin´earit´es les plus importantes se situent aux ouvrages de r´egulation (les vannes)[BSM98]. On verra dans le cha-pitre 4 comment choisir la variable de contrˆole pour isoler au mieux l’influence des non-lin´earit´es provenant des ouvrages de r´egulation aux bouts des biefs interconnect´es.
Etude des interactions entre les sous-syst`emes SISO Mˆeme si le choix de variables de contrˆole est pertinent, il est n´ecessaire d’analyser les interactions qui se produisent entre les sous-syst`emes SISO du syst`eme MIMO global : comment les interactions modifient-elles la stabi-lit´e, la performance et la robustesse du syst`eme MIMO global ? Nous allons analyser la question pour les trois logiques de r´egulation pr´esent´ees dans 1.6.2 : la r´egulation par l’aval distant, la r´egulation par l’amont local et la r´egulation mixte. On ´etudie aussi les solutions possibles pour diminuer l’effet des interactions pour les trois logiques de r´egulation. Dans ce but, on s’int´eresse au probl`eme des reports de la commande.
Les probl`emes et les questions soulev´es seront d’abord abord´es de fa¸con th´eorique. Puis, la m´ethodologie g´en´erique propos´ee (de la mod´elisation au contrˆole) est appliqu´ee pour les deux canaux r´eels : le canal exp´erimental d’´Evora et le cas plus complexe du canal de Gignac.
2les d´efinitions de ces termes sont donn´ees dans le chapitre 3.
CemOA
: archive
ouverte
d'Irstea
1.8
Organisation du m´
emoire de th`
ese
La th`ese comprend cinq chapitres. Dans ce premier chapitre on a pr´esent´e les probl`emes sou-lev´es pour les canaux d’irrigation et les diff´erentes m´ethodes de r´egulation d’un canal d’irrigation. On a d´ecrit les objectifs de la th`ese et la m´ethodologie d´evelopp´ee.
Le chapitre deux est consacr´e `a la mod´elisation d’un canal d’irrigation. D’abord on fait un ´etat de l’art sur les mod`eles existant dans la litt´erature. Ensuite, on choisit parmi ces mod`eles un mod`ele `a la base des ´equations de Saint Venant pour la commande lin´eaire. A l’aide du mod`ele choisi on repr´esente deux syst`emes r´eels : le canal exp´erimental d’´Evora (Portugal) et le canal de Gignac (France). Le mod`ele obtenu sous forme de matrice de transfert en la variable de Laplace s est analys´e dans le domaine fr´equentiel.
Dans le chapitre trois on d´eveloppe une m´ethodologie de contrˆole mono-bief (syst`eme SISO). L’analyse th´eorique de la stabilit´e, de la performance et de la robustesse du syst`eme pour dif-f´erentes architectures de r´egulation est faite en utilisant des outils de l’automatique classique. Les contrˆoleurs de type PI sont synth´etis´es pour les deux canaux d’irrigation. Leur performance est test´ee de fa¸con exp´erimentale dans le cas du canal d’´Evora et en simulation pour le canal de Gignac. Un premier r´esultat exp´erimental sur le canal de Gignac est montr´e.
Dans le chapitre quatre on s’int´eresse au contrˆole multi-biefs d’un canal d’irrigation. La m´ethodologie d´evelopp´ee dans le chapitre trois pour un syst`eme mono-bief est ´etendue dans le cas d’un syst`eme de deux biefs en s´erie. Une commande multivariable d´ecentralis´ee est d´evelopp´ee et le probl`eme des interactions entre les sous-syst`emes monovariables est ´etudi´e en d´etails. La m´ethodologie de contrˆole multivariable est test´ee exp´erimentalement sur le canal d’´Evora et en simulation dans le cas du canal de Gignac.
Le dernier chapitre de conclusion et perspectives r´esume les contributions de la th`ese, les limites de la pr´esente ´etude et propose quelques perspectives.
CemOA
: archive
ouverte
d'Irstea
Mod´
elisation d’un canal d’irrigation
La mod´elisation d’un processus consiste `a r´epondre aux questions suivantes : i) dans quel but vaut-il mod´eliser le processus r´eel ? ii) comment construire le mod`ele ?
i) Un ph´enom`ene r´eel est toujours mod´elis´e en fonction de l’´etude dont il fait l’objet. De plus, le ph´enom`ene faisant objet de l’´etude peut ˆetre vu par le mod´elisateur sous des angles diff´erents. Par exemple le ph´enom`ene de l’´ecoulement dans un canal d’irrigation peut ˆetre vu diff´eremment par un automaticien, un hydraulicien ou un gestionnaire de canal.
ii) Une fois le but de l’´etude d´efini, l’´etape suivante consiste dans la construction du mod`ele. Souvent, apr`es avoir construit un mod`ele, le mod´elisateur a recours `a une simplification. La simplification de mod`ele repr´esente en g´en´eral un compromis entre le coˆut du mod`ele (en temps de calcul notamment) et la qualit´e de fonctionnement.
Dans ce chapitre on va s’int´eresser `a la mod´elisation d’un canal d’irrigation r´eel en vue de l’application de la commande automatique. On va pr´esenter un ´etat de l’art sur les mod`eles de canaux d’irrigation existant dans la litt´erature et on va choisir celui qui r´epond au mieux au cahier des charges de la pr´esente ´etude.
2.1
Etat de l’art sur les mod`
eles de canaux d’irrigation
Une distinction classique de mod`eles pour l’automatique est faite dans [BDTR+92] et [Ric91]. Les auteurs d´efinissent deux classes de mod`eles : les mod`eles de connaissance (issus `a partir des lois de la physique) et les mod`eles de repr´esentation (obtenus `a la base d’exp´erimentation et de mesures qui permettent l’identification des param`etres d’un mod`ele de type ”boˆıte noire”). Il existe un grand nombre de mod`eles de canaux d’irrigation pour la commande automatique, mais il est difficile de faire une classification pr´ecise, car cette classification peut ˆetre faite selon diff´erents crit`eres (m´ethode d’obtention du mod`ele, sp´ecificit´es du syst`eme r´eel prises en compte, forme du mod`ele etc).
La plupart des mod`eles sont bas´es sur les ´equations de Saint Venant [BdSV71] et reposent sur la connaissance physique du syst`eme. Ces mod`eles permettent d’avoir des informations po-tentiellement riches sur le comportement statique et dynamique du processus dans un domaine
CemOA
: archive
ouverte
d'Irstea
de fonctionnement large. Alors, si l’on suit la classification faite dans [Ric91], ce sont des mod`eles de connaissance. Parmi ce type de mod`eles on va distinguer :
Mod`eles obtenus pour un r´egime de fonctionnement uniforme du canal d’irriga-tion
Les contributions relatives `a ce type de mod`ele sont nombreuses : [BS97], [CFSU82], [CSSU88], [Erm92], [PM85], [Sha71]. Le grand avantage que pr´esentent ces mod`eles est li´e au fait que lorsque le canal est en r´egime uniforme et de g´eom´etrie prismatique on connaˆıt une solution exacte des ´equations de Saint Venant lin´earis´ees. L’inconv´enient majeur li´e `a ces mod`eles provient du fait qu’ils ne repr´esentent pas de fa¸con pr´ecise le comportement d’un canal d’irrigation r´eel pour lequel la g´eom´etrie est variable et le r´egime de fonctionnement n’est jamais uniforme.
Mod`ele analytique de type Int´egrateur Retard (IR)
Ne connaissant pas de solution analytique des ´equations de Saint Venant lin´earis´ees dans le cas g´en´eral et dans le but d’utiliser des techniques classiques de r´eglage de contrˆoleurs lin´eaires, il est important de d´evelopper des mod`eles analytiques repr´esentant de fa¸con correcte la dynamique d’un canal d’irrigation dans des conditions r´ealistes (r´egime non-uniforme, g´eom´etrie qui n’est pas prismatique). C’est dans ce but que Schuurmans dans [SBB95] introduit le mod`ele analytique appel´e Int´egrateur Retard. A l’aide de deux param`etres : un int´egrateur et un retard entre le d´ebit amont et la cote aval, ce mod`ele repr´esente le comportement principal fr´equentiel du syst`eme en r´egime non-uniforme. Ce mod`ele est devenu un moyen simple et populaire pour approcher la dynamique d’un canal d’irrigation r´eel utilis´e pour la commande. Cependant, dans [GLG04] les auteurs d´emontrent que le mod`ele Int´egrateur Retard ne repr´esente pas de fa¸con pr´ecise la dynamique d’un canal d’irrigation, surtout en moyennes et hautes fr´equences.
Mod`ele analytique de type Int´egrateur Retard Z´ero (IRZ)
Afin d’am´eliorer l’approximation faite par Schuurmans dans [SBB95], Litrico et Fromion dans [LF04a] d´eveloppent un mod`ele nomm´e Int´egrateur Retard Z´ero (IRZ). En utilisant des approximations spatiale et fr´equentielle, les auteurs obtiennent un mod`ele analytique caract´eris´e par un Int´egrateur-Retard en basses fr´equences et par un gain constant avec un retard en hautes fr´equences. Les caract´eristiques de ce mod`ele sont donn´ees un peu plus loin dans le pr´esent document.
Dans [LF04a] l’efficacit´e du mod`ele est test´ee pour des canaux-types [BS97] de g´eom´etrie uniforme. On d´emontrera que ce type de mod`ele analytique est assez pr´ecis dans le cas des canaux d’irrigation r´eels et peut servir lors du pr´e-r´eglage des contrˆoleurs lin´eaires classiques.
Mod`ele lin´eaire fr´equentiel
Un autre type de mod`ele r´ecemment obtenu par Litrico et Fromion [LF02] repr´esente de fa¸con tr`es pr´ecise la dynamique d’un canal d’irrigation autour d’un r´egime de fonctionnement. Bas´e sur la lin´earisation des ´equations de Saint Venant, ce mod`ele non-analytique est obtenu sous forme de matrice de transfert en fonction de la variable de Laplace s. Il permet de prendre en compte tout r´egime de fonctionnement et toute g´eom´etrie d’un canal. Une description d´etaill´ee du mod`ele est faite plus loin.
Mod`eles obtenus par la discr´etisation des ´equations de Saint Venant
CemOA
: archive
ouverte
d'Irstea
Nombreuses sont les contributions concernant les mod`eles d´evelopp´es en utilisant des thodes num´eriques pour obtenir une solution approch´ee des ´equations de Saint Venant. Les m´e-thodes les plus utilis´ees pour les canaux d’irrigation sont la m´ethode des caract´eristiques [Gar88] et [GHDV92] et les m´ethodes de diff´erences finies. [BHDV88], [Red90], [RDO92] et [Red95] uti-lisent une discr´etisation explicite en temps, [Mal94a], [Che01] et [PG03] utiuti-lisent le sch´ema de Preissman [Pre65] qui fait partie des m´ethodes de discr´etisation implicite en temps. Les m´ethodes de discr´etisation explicite sont plus simples `a utiliser, mais la stabilit´e de la solution d´epend du choix du pas de temps. Les sch´emas implicites sont plus complexes et n´ecessitent un temps de calcul important. Par contre, la solution dans ce cas est inconditionnellement num´eriquement stable. Les mod`eles obtenus par la m´ethode de Preissman, par exemple, sont assez pr´ecis, mais difficiles `a utiliser pour la commande, car le nombre d’´etats de ces mod`eles est tr`es ´elev´e. Dans ce cas, une r´eduction de mod`ele est souvent n´ecessaire [PG03].
Mod`eles obtenus `a la base des ´equations de Saint Venant par la m´ethode de collocation
Des mod`eles non-lin´eaires peuvent ˆetre obtenus `a partir des ´equations de Saint Venant grˆace `
a une m´ethode des r´esidus pond´er´es de type ”collocation” [Oua04], [Dul01]. Le nombre d’´etats n´ecessaires pour obtenir une pr´ecision de mod`ele donn´ee est moins ´elev´e par rapport au nombre d’´etats n´ecessaires pour obtenir la mˆeme pr´ecision avec la m´ethode des diff´erences finies.
L’autre classe de mod`eles pour les canaux d’irrigation est celle des mod`eles de repr´esentation. Ces mod`eles sont d´ecrits par une relation math´ematique entre les entr´ees et les sorties. Leur plus important avantage est qu’ils sont relativement simples `a utiliser et `a identifier. Cependant, la distinction entre un mod`ele de ”repr´esentation” et un mod`ele de ”connaissance” n’est parfois pas tr`es claire. Les mod`eles de ”repr´esentation” n´ecessitent souvent une connaissance physique du syst`eme. Par exemple, dans [Del92], [Jre97], [Kos94], les auteurs utilisent un mod`ele de connaissance, bas´e sur les ´equations de Saint Venant, comme simulateur afin d’identifier un mod`ele de repr´esentation.
Les possibilit´es d’obtenir des mod`eles de ”repr´esentation” par identification sont ´etu-di´ees dans les travaux de [Wey01], [OW03], [OKW04]. Dans [Wey01], les mod`eles de premier et troisi`eme ordre sont obtenus `a l’aide d’une technique d’identification en utilisant des donn´ees r´eelles mesur´ees sur un canal d’irrigation. Dans [OKW04], les auteurs font une comparaison entre un mod`ele obtenu en utilisant une discr´etisation des ´equations de Saint Venant suivant le sch´ema de Preissman et les mod`eles obtenus par identification. Les auteurs concluent que les mod`eles obtenus par identification repr´esentent de fa¸con correcte la dynamique dans un canal d’irrigation r´eel et sont plus simples pour l’application de la commande automatique. Par contre, pour le d´eveloppement de ces mod`eles obtenus `a la base d’observations exp´erimentales entr´ees-sorties, le nombre d’exp´eriences est ´elev´e, surtout lorsqu’il s’agit d’un canal d’irrigation r´eel constitu´e de plusieurs biefs.
Parmi les m´ethodes de mod´elisation de canaux d’irrigation par identification, on pourrait citer aussi [GF97] dans lequel les auteurs proposent une mod´elisation mixte bas´ee sur des tech-niques d’identification, ainsi que [Lit99] o`u l’on propose un mod`ele non-lin´eaire pour un syst`eme barrage-rivi`ere en utilisant une m´ethode d’identification par optimisation avec relaxation.
CemOA
: archive
ouverte
d'Irstea