La propriété dans tous ses états
Texte intégral
Figure
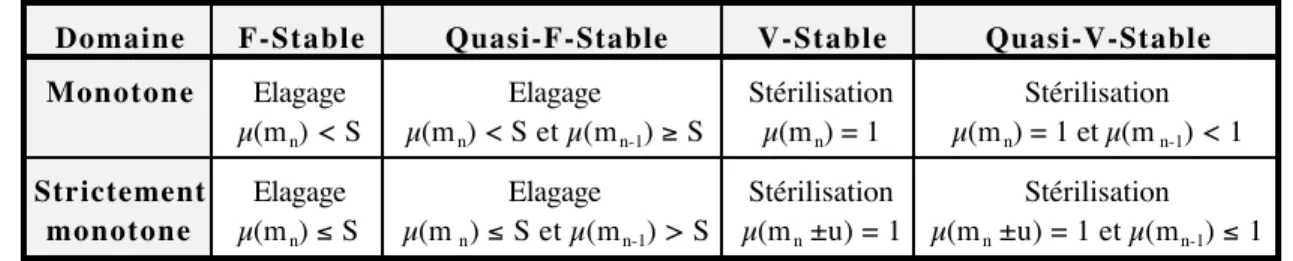
![Tableau 1 : Types des propriétés classiques [Des95a]](https://thumb-eu.123doks.com/thumbv2/123doknet/7789160.259708/19.918.91.826.202.610/tableau-types-des-propriétés-classiques-des-a.webp)
Documents relatifs
Figure B - Spectres d’absorption de la solution de 2’-hydroxyacétophénone (1) (en rouge, trait plein, notée acétophénone sur la figure), de la solution du dérivé boré (4)
pouvons ainsi connaître le poids M o de matière organique fécale excrétée par l’animal en 24 heures. L’analyse des excréments recueillis permet de connaître la
La manipulation se déroule en deux temps : - Extraction du glycogène puis – dosage de l’échantillon obtenu par rapport à une gamme étalon en utilisant la loi de
4 – Mettre 50 mL d’eau distillée dans un bécher de 100 mL et en verser quelques mL dans le mixeur afin de récupérer tout le broyat de foie.. Verser dans le bécher de
Quelle quantité de matière (en mol) y a-t-il dans 10kg de sucre, sachant que le sucre est formé de molécules de saccharose de formule C 12 H 22 O 11..
De fait, l'“impeto” contient deux idées originales dont l'importance allait s'avérer décisive : la conservation du mouvement, plus précisément de la quantité de mouvement
Les unités des différentes grandeurs doivent toujours être compatibles entre elles
[r]
