Scientifique
Université des Sciences et de la Technologie d’Oran -Mohamed Boudiaf-
Faculté de Génie Electrique Département d’Electrotechnique
THESE EN VUE DE L’OBTENTION DU DIPLOME
DE DOCTORAT EN SCIENCE
OPTION : COMMANDE ELECTRIQUE
Présentée par :
M
meKENDOUCI Khedidja
TITRE
Contribution à la commande sans
capteur mécanique d’une machine
synchrone à aimants permanents
SOUTENU PUBLIQUEMENT EN 2012 DEVANT LE JURY COMPOSE DE :
Président Mr A. TAIB BRAHIMI Professeur U.S.T.O (M.B) Rapporteur Mr B. MAZARI Professeur U.S.T.O (M.B) Examinateur Mr A. MANSOURI Professeur E.N.S.E.T Oran
Examinateur Mr A. MEROUFEL Professeur Univ. Dj. Liabes- SBA- Examinateur Mr A. BOUHENNA M.C.A E.N.S.E.T Oran
A
La mémoire de
Mon père el Hadj HAMMA
J’aurai aimé vous voir assister à mon soutenance
A la mémoire de tous les êtres chers que j’ai perdus
A TOUTE MA FAMILLE
^
I
El.hamdou li.ALLAH !!! Enfin !!!
Une thèse peut être considérée comme le fruit des années de travail personnel. Ce travail passe par différentes phases, certaines faciles et agréables, d'autres laborieuses et déroutantes. Les premières apportent beaucoup de satisfaction, voire d'autosatisfaction, et des avancées encourageantes. Effectivement, ces phases apparaissent comme le fruit d'un travail personnel. Les secondes apportent doutes et hésitations. Les résultats sont lents à venir et l'orientation du travail se trouve compromise. A ce stade, seuls trois facteurs m'ont permis de faire avancer ce travail : un encadrement éclairé et présent à chaque instant, une ambiance de travail propice, à la fois au sérieux et à la détente, ainsi qu'un soutien familiale, indirect mais indispensable. A la suite de ces années de recherche, ma thèse n'a pris réellement vie que par sa validation devant un jury rigoureux, volontaire, entreprenant et encourageant. Une certitude m'apparaît alors clairement. Ma thèse est tout, sauf le fruit d'un unique travail personnel. Elle est le fruit du travail d'une très grande équipe, tant professionnelle que personnelle. Equipe
dont je ne serai jamais assez reconnaissante.
Il y a tellement de gens à qui je dois des remerciements pour être arrivé à ce stade qu’il m’est vraiment difficile de pouvoir citer intégralement tout le monde. Ainsi, je remercie d’une manière générale tous ceux qui, d’une manière ou d’une autre, m’ont aidé durant ces années de thèse.
J’ai pu accomplir cette tâche au sein du Laboratoire de développement des entrainements électriques (LDEE) de l’Université des Sciences et de Technologie d’Oran – Mohamed Boudiaf – et le Laboratoire de Génie Electrique de Paris (LGEP-SUPELEC) de Paris Sud. A ce propos :
Je tiens à exprimer mes chaleureuses remerciements à M. MAZARI Benyounes, Professeur à l’Université des Sciences et de Technologie d’Oran, directeur du LDEE. Je le remercie pour m'avoir accueilli au sein du laboratoire, pour m'avoir proposée un sujet de thèse si intéressant et pour avoir spontanément encouragé. Je profite de ces quelques lignes pour le remercier pour l'ensemble de ces années d'encadrement passionné avec
II
d’enseignement et bien-sûr en tant que grand frère, pour ses grandes qualités pédagogiques, scientifiques et humaines ainsi que ses remarques judicieuses, son soutien, et sa disponibilité. Je ne peu m’en passer sans lui demander un grand Pardon pour tous les samedis ratés en famille pour être au laboratoire afin qu’on puisse finaliser au mieux ce travail. MERCI pour tout Hadj.
Je tiens également à adresser ma sincère et profonde reconnaissance à M. TAIB BRAHIMI Abdelhalim, Professeur à l’Université des Sciences et de Technologie d’Oran, pour avoir accepté d'être président de mon jury de thèse. J’ai eu la chance de travailler avec lui. Sa bonne connaissance dans les domaines de conception des machines a pu m’apporter beaucoup d’informations sur les machines à aimants sujet de ma thèse. Ainsi mes remerciements pour les différentes discussions afin de partager avec moi son expérience.
Je souhaite remercier Mr MEROUFEL Abdelkader, Professeur à l'Université Djillali Liabes de Sidi Bel Abbes, d’avoir accepté d’examiner mon travail ainsi de participer au jury. Ses questions pertinents pendant différentes soutenances au LDEE et conférences m’ont permis de rendre plus claire ma rédaction.
Je remercie vivement Mr MANSOURI Abdellah Professeur à l’Ecole Normale Supérieure de l’Enseignement Technologique d’Oran ENSET, d’avoir accepté de juger ce travail et de faire part de jury. Ces précieuses remarques ainsi les discussions enrichissantes pendant ses passages à l’USTO dans différents occasions m’ont donnés de nouvelles pistes de réflexion.
J'exprime ma profonde gratitude à Mr BOUHENNA Aberrahmene, Professeur à l’Ecole Normale Supérieure de l’Enseignement Technologique d’Oran ENSET, pour l'honneur qu'il m'a fait en acceptant d’examiner cette thèse et en participant à mon jury.
Je suis particulièrement reconnaissante envers M. ZEMALACH MEGUINI Kadda, Maitre de Conférence à l’Université des Sciences et de Technologie d’Oran, pour avoir accepté de participer à mon jury de thèse. Son aide, son
III
Je tiens à exprimer toute ma gratitude et ma reconnaissance aux membres de Laboratoire de Génie Electrique de Paris (LGEP-SUPELEC) de Paris Sud pour l’accueil chaleureux et la disponibilité afin de rendre facile l’avant dernière étape de mon travail, celle de la réalisation pratique sur un banc d’essai. A ce propos je veux exprimer mes sincères remerciement à M. Mikael Hilrait , Professeur à LGEP, M. Damba Diallo, Professeur à LGEP-, et M. Ahmad Akrad Maître de Conférence à l’Université d’Alep - Syrie, pour avoir accompagné mon travail dans de meilleur conditions avec un souris constant et une patience incroyable en passant de plus de 10h par jour devant le banc d’essai ! Les nombreuses discussions fructueuses que nous avons pu avoir, leur très grande disponibilité ainsi que la qualité de leurs rapports humains sont pour beaucoup dans les résultats obtenus lors de ce travail. Je tiens à leur exprimer toute mon amitié et ma reconnaissance pour le climat de bonne humeur qu’ils contribuent à créer et à maintenir.
Un Merci particulier à M. Benhadria Mohamed Rachid enseignant chercheur à l’USTO pour son étude approfondie du manuscrit et pour les remarques constructives dont il m'a fait part avant, pendant et après la rédaction malgré ses grandes responsabilités professionnelle et familiale. Je voudrais également insister pour remercier en lui l'enseignant qui m'a, le premier, donné goût au génie électrique, qui m'a donné envie de percer les mystères de cette option d’Electrotechnique alors que mon parcours me dirigeait vers d'autres voies. Je le remercie pour tout ça et pour son immense sympathie et son encouragement constamment prouvé depuis que nous étions étudiants jusqu’à ce jour en me rappelant chaque jour (tu es forte, tu
arrives).
J’ai une pensée amicale sans oublier de le remercie M. Tahar Mohamed, d’avoir accepté la lourde tâche, pour soulager la mienne durant la phase de rédaction. Merci, pour ta disponibilité et ta gentillesse.
Que dirai-je de Mme Dadi Rachida ? Amie et sœur, c’est donc à toi que je pense d’abord pour tes qualités humaines, ta générosité, ton impatience jamais contenue mais toujours respectueuse et surtout une simplicité, si complexe à définir, qui fait de toi une personne peu commune. Merci d’être à mes côtés.
IV
serais certainement pas oublier son soutien, son encouragement à travers les communications téléphonique pendant des heures constant.
Je tiens aussi à exprimer ma profonde sympathie à toutes les personnes qui composent LDEE, avec qui j'ai passé d'agréables moments ainsi que les enseignants de la faculté de génie électrique pour leur soutien et encouragement. Je remercie particulièrement tous les doctorants avec qui j'ai partagé ces années de thèse, sans oublier personne.
Je voudrais maintenant présenter au delà du travail les plus précieux remerciements à Rachid, Tahar, Kadda et Rachida !!! Je n'oublierai jamais les instants de détente journaliers (la pause café de 10h...et les téléphone de midi en cherchant c’est quoi le menu) et les innombrables fous rires si bienfaisants avec les variétés de Kadda. Leurs présences, leurs sentiments fraternels, leurs soutiens solides et sûrs à n’importe quelles occasions au pire et au meilleur ne seront jamais oubliés sans qui rien ne pourrait tourner au laboratoire!! J’ai appris avec eux de pardonner de retrouver l’espoir et de foncer !! C’est ma deuxième famille à L’USTO.
Enfin je tiens à terminer par un GRAND MERCI mon premier soutien, ma chère famille que je porte toujours avec moi dans mes pensées. Sans leur confiance immense en moi, sans leur aide et leur amour je n’aurai pu aller au bout de mes projets. Je ne saurai jamais suffisant les remercier pour m'avoir toujours poussé à faire ce qui me plaisait, même si cela m’a conduit à des études bien longues. Jamais ils n'ont exprimé le moindre doute et m'ont constamment encouragé et félicité tout au long de mes parcours. Qu’ils trouvent en moi la fille redevable toute ma vie.
A la fin ce n’est pas un merci mais un IMMENSE PARDON à mes adorables enfants !!
1
Table des matières
Avant propos I
Table des matières 1
Listes des figures 4
Notations 8
Partie - A - Commande avec capteur mécanique
Introduction générale
11Chapitre I
Description et commande vectorielle du MSAP
24I.1 Introduction 25
I.2 Applications industrielles d’un MSAP 25
I.3 Modélisation du moteur synchrone à aimants permanents 28
I.4 Modélisation de l’onduleur de tension 32
I.5 La commandabilité du MSAP 34
I.6 Stratégies de commande du MSAP 35
I.7 Commande scalaire du MSAP 37
I.8 Commande vectorielle du MSAP 38
I.9 Calcul des régulateurs 43
I.10 Résultats de simulation 48
I.11 Conclusion 52
Références 54
Chapitre II
Commande par mode glissant du MSAP
57II.1 Introduction 58
II.2 Systèmes à structure variable 59
II.3 Théorie de la commande à structure variable 59 II.4 Conception de la commande par mode de glissement 60 II.5 Application du MG pour le réglage de la vitesse du MSAP 66
II.6 Résultats de simulation 70
II.7 Conclusion 76
Références 77
Chapitre III
Commande par backstepping du MSAP
80III.1 Introduction 81
III.2 Principe de la commande backstepping 81
2
III.4 Application du backstepping à la commande du MSAP 86
III.5 Résultats de simulation 90
III.6 Commande backstepping avec action intégrale 93
III.7 Résultats de simulations 95
III.8 Conclusion 99
Références 100
Partie - B - Commande sans capteur mécanique
Chapitre IV
Commande sans capteur mécanique du MSAP par
observateur de Luenberger
102
IV.1 Introduction 103
IV.2 Observabilité du MSAP 104
IV.3 Principe de fonctionnement de l'observateur 110 IV.4 L’observateur de Luenberger linéaire 111
IV.5 L’observateur de Luenberger étendu 112
IV.6 Application à l’estimation de la vitesse et de la position du MSAP 113 IV.7 Benchmark « Commande sans capteur mécanique » 115 IV.8 Résultats de simulation avec régulateur classique PI 117 IV.9 Résultats de simulation avec régulateur backstepping 120
IV.8 Conclusion 126
Références 128
Chapitre V
Commande sans capteur mécanique du MSAP par
Filtre de Kalman
131
V.1 Introduction 132
V.2 Principe du filtre de Kalman 132
V.3 Le Filtre de Kalman étendu 135
V.4 Le Filtre de Kalman à deux niveaux – FKDN – 137 V.5 FKDN pour l’estimation de la vitesse et de la position 143
V.6 Résultat de simulation 148
V.7 Conclusion 160
Références 162
Chapitre VI
Validation expérimentale
164VI.1 Introduction 165
VI.2 Présentation du banc expérimental 166
VI.3 Résultats expérimentaux pour la commande avec capteur mécanique
3
VI.4 Résultats expérimentaux pour la commande sans capteur mécanique
182
VI.5 Conclusion 195
Conclusion générale 196
Annexe A Différentes structures des MSAP 299
Annexe B Modélisation du MSAP dans les différents repères 201 Annexe C Préliminaire sur l’observabilité et les observateurs 217
Annexe D Paramètres du MSAP et de la charge 221
4
Listes des figures
Chapitre I Description et commande vectorielle du MSAP
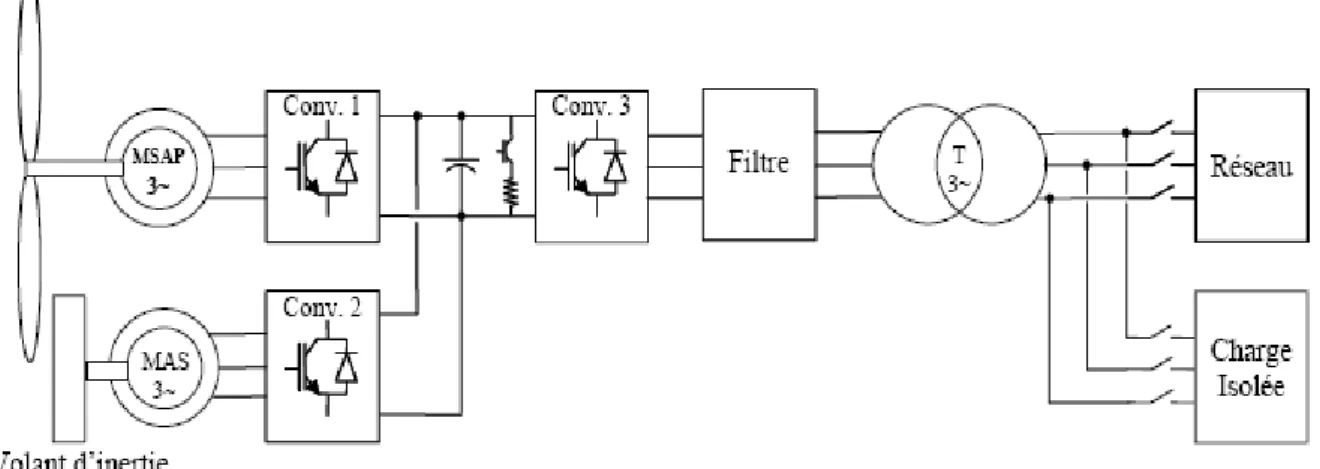
Fig. 1.1 Schéma de principe d’une éolienne à vitesse variable avec MSAP
Fig. 1.2 Représentation du MSAP dans le repère triphasé (a,b,c)
Fig. 1.3 Schéma équivalent du M.S.A.P dans les plan (abc) et (d,q).
Fig. 1.4 Modèle de la MSAP
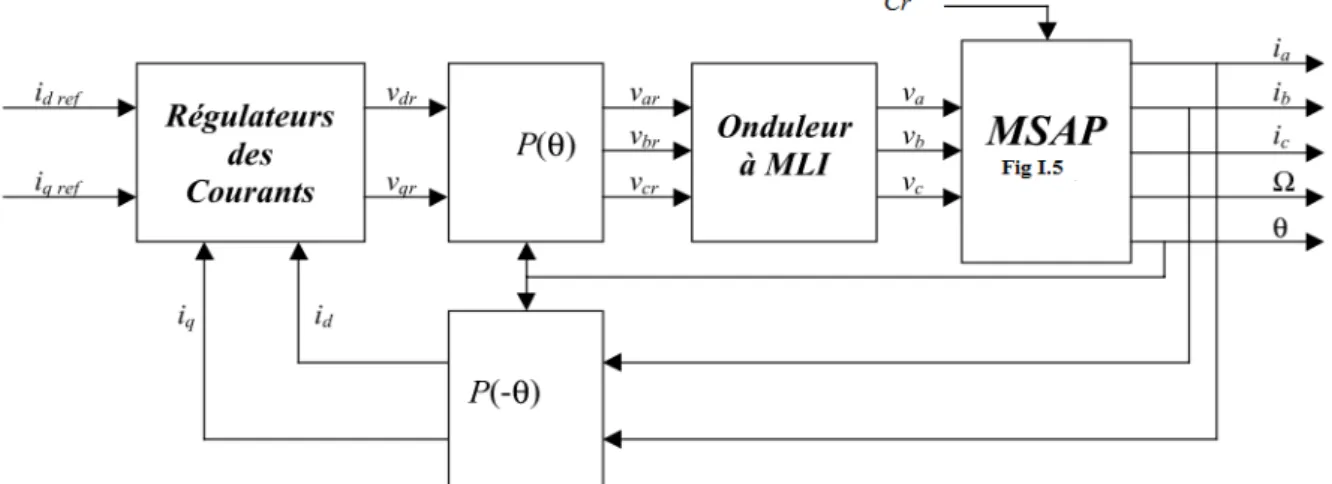
Fig. 1.5 Représentation fonctionnelle du MSAP
Fig. 1.6 Représentation simplifiée de l’onduleur
Fig. 1.7 Schéma du principe de l’autopilotage d’un MSAP
Fig. 1.8 Schéma global de la commande vectorielle du MSAP
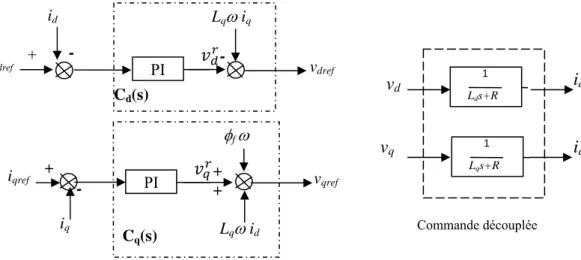
Fig. 1.9 Découplage des axes d, q du MSAP par retour d’état
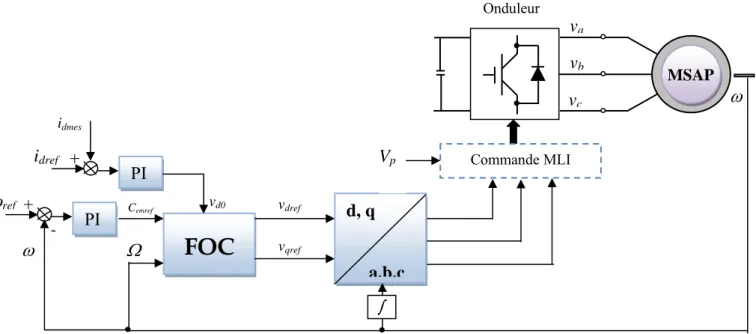
Fig. 1.10 Schéma global de la commande vectorielle simplifiée Fig. 1.11 Schéma bloc du FOC
Fig. 1.12 Schéma global de la commande vectorielle indirecte Fig. 1.13 Boucle de régulation du courant direct
Fig. 1.14 Boucle de régulation de la vitesse
Fig. 1.15 Principe de découplage par compensation
Fig. 1.16 Anti-Reset-Windup Fig. 1.17 Schéma global de la commande vectorielle directe
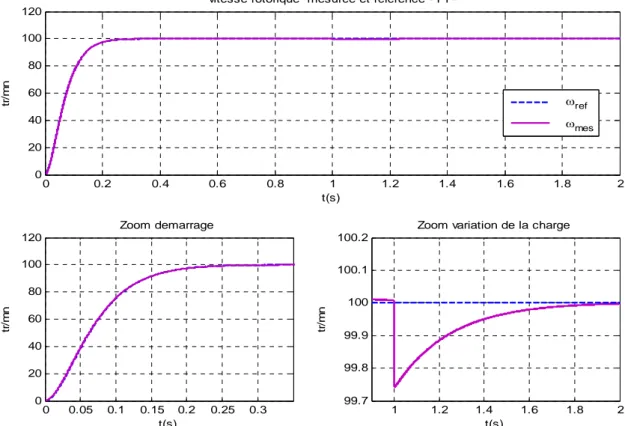
Fig. 1.18 Comportement de la vitesse avec les paramètres nominaux du MSAP
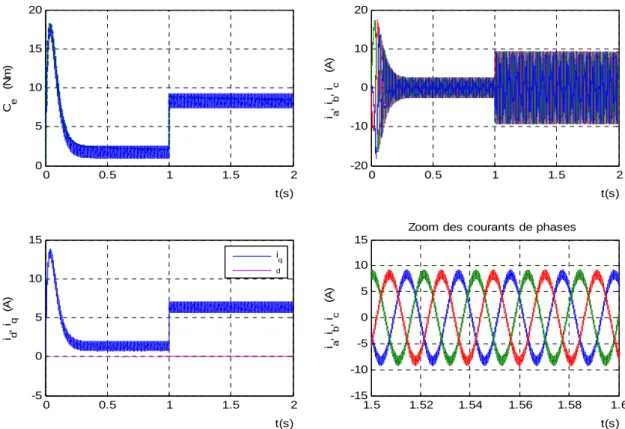
Fig. 1.19 Comportement des courants et du couple de la MSAP Fig. 1.20 Comportement de la vitesse avec benchmark
Fig. 1.21 Comportement des courants et du couple de la MSAP
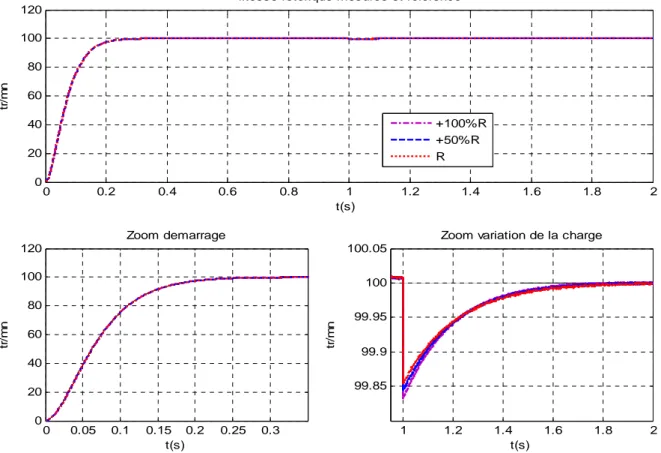
Fig. 1.22 Comportement de la vitesse de la MSAP réglée par PI - Test de la variation de la résistance statorique R
Fig. 1.23 Comportement de la vitesse de la MSAP réglée par PI - Test de la
variation du moment d’inertie J
Chapitre II Commande par mode glissant du MSAP Fig. 2.1 Différentes modes pour la trajectoire
Fig. 2.2 Linéarisation exacte de l’écart Fig. 2.3 Définition de la fonction signe
Fig. 2.4 Structure globale du réglage de la vitesse de la MSAP par mode glissant Commande Un adoucie avec seuil
Fig. 2.6 Fonction d’appartenance de l’entrée de l’entrée ‘e’ et de la sortie ‘Kω’
Fig. 2.7 Comportement de la vitesse du MSAP réglé par MG - Cas de réglage avec la fonction signe
Fig. 2.8 Comportement de la vitesse du MSAP réglé par MG -Cas de réglage avec la fonction seuil
5
la logique flou
Fig. 2.10 Comparaison du comportement de la vitesse de la MSAP réglée par MG Fig. 2.11 Comportement des courants et du couple
Fig. 2.12 Comportement de la vitesse de la MSAP réglée par MG -Test de poursuite Fig. 2.13 Comportement de la vitesse de la MSAP réglée par MG (logique floue)
Test de la variation de la résistance statorique R du MSAP
Chapitre III Commande par backstepping du MSAP Fig. 3.1 Structure globale du réglage de la vitesse du MSAP par backstepping
Fig. 3.2 Structure interne du bloc régulateurs backstepping
Fig. 3.3 Comportement de la vitesse du MSAP réglée par backstepping Fig. 3.4 Comportement des courants et du couple
Fig. 3.5 Comportement de la vitesse de la MSAP réglée par backstepping
Fig. 3.6 Comportement de la vitesse de la MSAP réglée par backstepping avec l’action intégrale
Fig. 3.7 Comparaison du comportement de la vitesse de la MSAP réglée par backstepping avec et sans l’action intégrale
Fig. 3.8 Comportement de la vitesse du MSAP réglée par backstepping avec l’action intégrale – cas de la variation de la résistance statorique R du MSAP-
Fig. 3.9 Comportement de la vitesse du MSAP réglée par backstepping avec l’action intégrale – cas de la variation du moment d’inertie J du MSAP
Fig. 3.10 Comparaison du comportement de la vitesse de la MSAP réglée par PI,
mode glissant –flou et backstepping avec action intégrale
Chapitre IV Commande sans capteur mécanique du MSAP par observateur de Luenberger
Fig. 4.1 Schéma fonctionnel d'un observateur d'état
Fig. 4.2 Schéma d’un observateur linéaire
Fig. 4.3 Structure d’observateur de Luenberger étendu de la MSAP
Fig. 4.4 Domaine de placement de pôle dans le plan S
Fig. 4.5 Benchmark pour la commande sans capteur mécanique
Fig. 4.6 Comportement de la vitesse observée de la MSAP (régulateur PI) Fig. 4.7 Comportement des courants et du couple du MSAP (régulateur PI) Fig. 4.8 Comportement de la position (avec bruit de mesure)
Fig. 4.9 Comportement de la vitesse (benchmark - régulateur PI) Fig. 4.10 Comportement de la position (benchmark - régulateur PI)
Fig. 4.11 Comportement de la vitesse (régulateur backstepping) Fig. 4.12 Comportement de la position (régulateur backstepping)
Fig. 4.13 Comportement de la vitesse (benchmark - backstepping) Fig. 4.14 Comportement de la vitesse (variation de R)
Fig. 4.15 Comportement de la position (variation de R) Fig. 4.16 Comportement de la vitesse (variation de J)
6
Fig. 4.17 Comportement de la position (variation de J)
Fig. 4.18 Comportement de la vitesse (Backstepping) -(Inversion du sens de
rotation)
Fig. 4.19 Comportement de la position (Backstepping)-(Inversion du sens de
rotation)
Chapitre V Commande sans capteur mécanique du MSAP par Filtre de Kalman
Fig. 5.1 Schéma bloc d’un filtre de Kalman
Fig. 5.2 Schéma bloc de la commande sans capteur mécanique avec le filtre de Kalman a double niveaux
Fig. 5.3 Comportement de la vitesse (PI)
Fig. 5.4 Comportement des courants et du couple (PI)
Fig. 5.5 Comportement e de la position (PI)
Fig. 5.6 Comportement de la vitesse (benchmark - r PI)
Fig. 5.7 Comportement de la positon (benchmark - PI)
Fig.5.8 Comportement de la vitesse de la MSAP (Backstepping)
Fig. 5.9 Comportement des courants et du couple du MSAP (Backstepping)
Fig.5.10 Comportement de la positon (Backstepping)
Fig.5.11 Comportement de la vitesse de la MSAP (backstepping)
Fig.5.12 Comportement de la position (benchmark-Backstepping)
Fig.5.13 Comportement de la vitesse (FKDN- variation de R)
Fig.5.14 Comportement de la position (FKDN- variation de R)
Fig.5.15 Comportement de la vitesse (FKDN- variation de J)
Fig.5.16 Comportement de la position (FKDN- variation de J)
Fig.5.17 Comportement de la vitesse (FKDN-inversion du sens de rotation)
Fig.5.17 Comportement de la position (FKDN-inversion du sens de rotation)
Chapitre VI Validation expérimentale
Fig. 6.1 Photo du dispositif de commande du MSAP du LGEP Fig.6.2 Mesure des deux courants de phase et de la position
Fig 6.3 Architecture et périphérique du DS1103
Fig. 6.4 Configuration générale de la simulation numérique
Fig 6.5 Comportement de la vitesse (essai à vide - PI)
Fig 6.6 Comportement de la vitesse (essai en charge - PI)
Fig 6.7 Comportement des courants (essai en charge- PI))
Fig 6. 8 Comportement de la vitesse (inversion du sens de rotation)
Fig 6.9 Comportement des courants (Benchmark commande avec capteur
Fig.6.10 Comportement de la vitesse (benchmark commande avec capteur - PI ) Fig.6.11 Comportement de la vitesse (variation de R - PI)
7
Fig 6.13 Comportement de la vitesse (variation de J - PI) Fig 6.14 Comportement des courants (variation de J-PI)
Fig 6.15 Comportement de la vitesse (essai à vide- Backstepping)
Fig 6.16 Comportement de la vitesse ( variation de la charge - Backstepping) Fig 6.17 Comportement des courants ( variation de la charge - Backstepping ) Fig 6.18 Comportement de la vitesse (en charge- Backstepping)
Fig 6.19 Comportement de s courants (essai en charge - Backstepping)
Fig 6.20 Comportement de la vitesse (benchmark commande avec capteur-
Backstepping)
Fig 6.21 Comportement des courants (benchmark commande avec capteur) Fig 6.22 Comportement de la vitesse (variation R- Backstepping )
Fig 6.23 Comportement des courants (variation R- Backstepping ) Fig 6.24 Comportement de la vitesse (variation J- Backstepping ) Fig 6.25 Comportement des courants (variation J - Backstepping )
Fig 6.26 Comparaison du comportement de vitesse (PI et Backstepping)
Fig 6.27 Comparaison du comportement des courants entre PI et Backstepping Fig 6.28 Comportement de la vitesse (FKDN –PI)
Fig 6.29 Comportement de la position (FKDN –PI) Fig 6.30 Comportement des courants (FKDN –PI)
Fig 6.31 Comportement de vitesse (inversion du sens de rotation - FKDN –PI) Fig 6.32 Comportement des courants (inversion du sens de rotation- FKDN –PI) Fig 6.33 Comportement de la position (inversion du sens de rotation -FKDN–PI)
Fig 6.34 Comportement de vitesse (benchmark - FKDN –PI) Fig 6.35 Comportement de la vitesse (FKDN –Backstepping) Fig 6.36 Comportement de la position (FKDN –Backstepping) Fig 6.37 Comportement des courants (FKDN –Backstepping)
Fig 6.38 Comportement de la vitesse (inversion de rotation -FKDN – Backstepping)
Fig 6.39 Dynamique de la position (inversion de rotation -FKDN –Backstepping) Fig 6.40 Comportement de la vitesse (benchmark- FKDN –Backstepping)
Fig 6.41 Comportement des courants (FKDN –Backstepping)
Fig 6.42 Comportement de la position (FKDN –Backstepping)
Fig 6.43 Comportement de vitesse (benchmark - FKDN –backstepping )
Fig 6.44 Comportement de vitesse (benchmark - FKDN –backstepping )
8
NOTATIONS
Cem Couple électromagnétique
Cemref Référence de couple électromagnétique
Cr Couple de charge
d q indices de composantes de PARK directe et en quadrature.
α β indices de composantes de Clark.
E Tension continue d’alimentation de l’onduleur
ed , eq Fem de couplage induite suivant l’axe d et q
F Fréquence de modulation
ia , ib ,ic Les courants statoriques suivant les axes a, b et c
va ,vb ,vc Les tensions statoriques suivant les axes a, b et c
id iq Les courants statoriques suivant les axes d, q
vd vq Les tensions statoriques suivant les axes d, q
iα iβ Les courants statoriques suivant les axes αβ
vα vβ Les tensions statoriques suivant les axes αβ
idref iqref Les courants de référence suivant les axes d, q
vdref vqref Les tensions de référence suivant les axes d, q
J Moment d’inertie de la partie mécanique
Gain du régulateur intégrateur de la vitesse
Kiid Gain du régulateur intégrateur du courant direct
Kpid Gain du régulateur proportionnel du courant direct
Gain du régulateur proportionnel de la vitesse
Ld Lq L’inductance suivant l’axe d et q
Lα Lβ L’inductance suivant l’axe α et β
L Inductance statorique
Ɵ Position rotorique
Ɵe Position électrique entre le rotor et le stator
R ou Rs Resistance statorique
φa,φb ,φc Les flux statoriques suivant les axes a, b et c
φf Flux de l’aimant permanent
φd, φq Les flux statoriques suivant les axes d et q
9
x Vecteur d’état de dimension n
u Vecteur d’entrée (La commande)
y Vecteur de sortie (La mesure)
S(x) la surface de glissement
e(x) l'écart de la variable à régler
λx Constante positive de la bande passante de contrôleur MG
r Degré relatif
Ueq Commande équivalente
Un Commande de convergence
K Gain de reglage par MG
s Indice de transformée de Laplace
ki paramètre de conception du régulateur backstepping de l’étape i
(x)d L’état désiré du régulateur backstepping de l’étape i
L’état estimé
ε (x) L’écart entre la valeur estimée et l’état réel La sortie estimée
li Le gain de l’observateur de Luenberger
ωobs La vitesse observée
ωmes La vitesse mesurée
ωref La vitesse de référence
T32 Transformation de Clark
P(θ) Transformation de Park
vecteur d’état à l’instant présent
| L’estimation du vecteur d’état à l’instant présent
vecteur d’état à l’instant passé
X[k|k – 1] Le vecteur de prédiction
| L’estimation du vecteur d’état à l’instant présent
| La matrice de variance-covariance
K[k] La matrice de gain du filtre de Kalman Valeur des entrées inconnues
W[k] Bruits d’état
η[k] Bruits de mesure
l’état estimé si inconnue est parfaitement connu. l’état estimé si inconnue est parfaitement connu
M[k] et N[k] Matrice de passage
10
MSAP Machine /moteur synchrone à aimants permanents
MSAPPL Machine/moteur synchrone à aimants permanents à pôles lisses
MSAPPS Machine/moteur synchrone à aimants permanents à pôles saillants
MCC Machine à courant continu
MCA Machine à courant alternatif
MG Mode glissant
MGF Mode glissant flou
FKE Filtre de Kalman étendu
11
I. Introduction
Que ce soit pour accroître l'efficacité énergétique ou pour optimiser et améliorer les contrôles des procédés, les industriels s'équipent de plus en plus d'entraînements à vitesse variable par les moteurs électriques.
Ces dernières années, le domaine d’application des moteurs à courant alternatif (MCA) s’est considérablement étendu avec le développement de l’électronique de puissance et de la micro informatique. Les évolutions technologiques leurs ont permis de retrouver la souplesse de contrôle et les performances dynamiques naturellement obtenues jusqu’alors avec la machine à courant continu (MCC).
Historiquement [LYS99], les premiers entraînements utilisaient des MCC dont le contrôle s’avérait simple du fait de la séparation naturelle de l’inducteur et de l’induit hormis le cas particulier du moteur série. Cependant, la présence du système bagues-balais constituait un frein au développement de ces machines notamment pour des applications dans des environnements sévères.
Par ailleurs, des recherches approfondies ont permis de mettre au point des matériaux nouveaux comme par exemple les aimants permanents à base de terre rare, qui ont été introduits dans des machines synchrones présentant ainsi beaucoup d’avantages [BOS02] par rapport aux autres types de machines à courant continu ou alternatif avec un couple massique élevé, un excellent rendement, une maintenance réduite, un faible moment d’inertie et une grande capacité de surcharge sur toute la plage de vitesse.
C’est ainsi que les moteurs synchrones à aimants permanents (MSAP) ont apparu et sont de plus en plus utilisés de nos jours dans plusieurs applications industrielles [AKR10][EZZ10][KEN03] tel que les équipements domestiques (machine à laver le linge), les équipements de technologie de l’information (DVD drives), Les équipements de soins médicaux et de santé, la propulsion des sous marins et des véhicules électriques ainsi que les machines-outils et les applications de l’énergie de l’éolienne.
Il existe de nombreux principes de commande des MSAP, parmi lesquels l’application des techniques de la commande vectorielle [BLA72] qui se distingue comme un outil puissant et efficace, dotant la MSAP de performances dynamiques aussi satisfaisantes que les MCC, mais posant entre autre un problème majeur dû à la nécessité d'emploi d'un capteur mécanique (vitesse, position ou couple de charge).
Dans ce contexte cette thèse est construite autour de deux sujets proches l’un de l’autre. La première partie traite la commande du MSAP avec capteur mécanique tout en cherchant des performances dynamiques élevées et la
12
deuxième partie s’intéresse à la suppression de ce capteur où la commande sans capteur mécanique tout en préservant les mêmes performances.
II. Contexte et état de l'art
Abordons le premier volet ! Dans la formulation d’un problème de
commande, il y a des anomalies spécifiques entre le système réel et le modèle mathématique développé dans le but de concevoir la ou les lois de commande. Cette particularité peut être due à la variation paramétrique du système ou de l'approximation du comportement complexe du système par un modèle direct. Concernant le modèle, celui-ci n’est autre qu’une approximation du système physique qu’il doit représenter. L’écart entre le modèle de commande et le procédé réel résulte d’une méconnaissance totale ou partielle de certains phénomènes physiques qui sont mal connues ou volontairement négligées. Il convient donc d’étudier la robustesse de la loi de commande appliquée afin d’être capable de garantir la stabilité avec un certain degré de performance, en dépit des incertitudes.
Lorsque la partie commandée du processus est faiblement perturbée, les algorithmes de commande classique (à base de PI) en général peuvent s’avérer suffisants si les exigences sur la précision et la performance du système ne sont pas trop strictes. Cependant, lorsque la dynamique du modèle s’éloigne de celle du processus réel (cas des procédés non linéaires et/ou à paramètres variant dans le temps), les performances d’une commande linéaire se dégradent au fur et à mesure que l’écart entre les paramètres réels et ceux utilisés dans le calcul de la commande augmente. Pour remédier à ce dysfonctionnement, les recherches se sont orientées vers des techniques de commande assurant la robustesse du comportement du processus vis-à-vis des incertitudes sur les paramètres et leurs variations. On peut citer dans ce contexte la commande adaptative [FRE99], [KRI95], [MAR95], [ÂST84], la linéarisation par retour d'état adaptatif [CAL99], [KOK01], la commande H∞ [DOY89] [FRA87] [BAL91], et également des
méthodologies de commande non linéaire comme la commande par mode de glissement (CMG) [LOU02][UTK99][BAR99][BÜH86][DRA69]. Cette dernière commande s’inscrit dans la théorie des systèmes à structure variable qui a pour vocation l’obtention, en boucle fermée, d’une dynamique largement indépendante de celle du processus et surtout de ses variations éventuelles, en ce sens, la commande à structure variable est une commande non linéaire qui possède la propriété de robustesse [EFE04][EDW00][UTK77][EME67] [ITK76]. La liste de ses applications est très large. Citons ici quelques références intéressantes dans le domaine de la commande des machines
13
[UTK93][UTK99][ZHA00][BEN98][LAS04][FAQ03][INA02][MAH99] PAN94] [BOL93], et pour voir son efficacité notre choix a été guidé à l’étude et l’application de cette loi de commande pour le réglage de la vitesse du MSAP.
Il existe aussi d’autres types de commande robuste telle que la logique floue [HAJ96] [MIH12], la commande prédictive [PER02], la linéarisation entrée sortie [BEN01][ETI02], les réseaux de neurones [MIH02], et la commande par backstepping [BEN00][BOU06]. Cette dernière commande est très récente, elle présente une procédure récursive qui combine entre le choix de la fonction de Lyapunov et la synthèse de la loi de commande. Cette méthode transforme le problème de synthèse de la loi de commande pour le système global en une synthèse de séquence de commande pour des systèmes réduits. En exploitant la flexibilité de ces derniers, le backstepping peut répondre aux problèmes de régulation, de poursuite et de robustesse avec des conditions moins restrictives que d'autres méthodes [BOU06]. L’ingéniosité de l’idée nous a conduits à proposer l’utilisation de cette loi de commande pour le réglage de la vitesse du MSAP avec capteur mécanique et qui fera l’objet du premier volet de notre thèse.
Concernant le deuxième volet de notre travail on s’intéresse à l’amélioration
des performances de ces commandes appliquées à la MSAP sans l’utilisation du capteur mécanique. Outre son coût financier, ce dernier est une source de problèmes de différentes natures cités ci-dessous
• Il doit être suffisamment précis pour éviter des oscillations de vitesse dûes à une quantification trop importante de la position et donc une réduction de la fiabilité du système.
• Il doit être protégé contre les poussières et les chocs pour assurer sa sureté de fonctionnement dans un environnement industriel sévère qui se traduit par une sensibilité additionnelle aux perturbations extérieures.
• Il doit être logé entre la charge et le moteur puisque la plupart des installations, un ventilateur occupe l’une des extrémités de l’arbre du moteur, ceci pose aussi un problème d’encombrement voire l’impossibilité d’intégrer de tels capteurs à la périphérie ou à l’intérieur du moteur, induisant un plus grand accouplement élastique. Cette solution technique est relativement coûteuse puisque l’accouplement et le capteur doivent supporter les à-coups de couples imposés par le moteur.
• Une augmentation significative du coût du capteur de position et de sa maintenance en cas de panne.
14
Tenant compte de tous ces inconvénients et pour des raisons économiques, de nombreuses études ont été faites sans capteur mécanique tout en préservant le bon fonctionnement de la machine avec une sureté de fonctionnement même en mode dégradé. Ces études ont abouti à différentes méthodes de commande sans capteur, toutes fondées sur l'utilisation de variables électriques, courants et tensions, afin d’estimer la position du rotor d'après un modèle représentatif de la machine.
Il existe actuellement dans la littérature plusieurs techniques de synthèse d’observateurs non linéaire permettant d’estimer la vitesse ou la position afin de réaliser la commande sans capteur mécanique, parmi ces méthodes on cite celles qui ne tient pas compte du modèle basé sur le principe d’injection d’un signal d’excitation supplémentaire à haute fréquence indépendant de l’alimentation fondamentale de la machine [MIR07][ARI07][PER07]. D’autres utilisent l’approche basée sur le modèle de la machine. Cette approche est réalisée par l’estimation des forces électromotrices f.e.m dans un repère tournant hypothétique (δ −γ) [NAH01][VAS08][MOR02] ou dans un repère fixe (α-β) [YAN02][ZHA07][CHE03] ou par des observateurs d’état, en effet, cette approche a été appliquée avec succès à la commande sans capteur des machines. Certains observateurs basés sur la technique de modes glissants ont été l’objet de nombreux travaux soit d’ordre un [YAN02][PAP06][EZZ10] ou d’ordre supérieur [ZAL10]. D’autres utilise les réseaux de neurones artificiels [LIU06][HAL10], on trouve aussi les observateurs interconnectes à grand gain [BES98][TRA08][GIR10] et les méthodes de modèle de référence adaptatif [KIM03][RAS07][LAR10].
Le filtre de Kalman étendu (FKE) a été utilisé dans [DHA91] [XU03]. Bien que ce filtre soit stable et bien connu, il entraine un coût de calcul important nécessitant une initialisation bien précise. En revanche, [BOU04] a développé un filtre de Kalman étendu discret. L’algorithme utilisé présente l’avantage de réduire le coût de calcul (−3.6%) en comparaison à un filtre classique. Un autre observateur plus efficace dit filtre de Kalman à deux niveaux a été proposé [AKR08] permettant une réduction notable du temps de calcul tout en conservant les performances du FKE conventionnel. Ce type de filtre a attiré notre attention et a été appliqué par la suite.
Concernant la commande sans capteur mécanique, la plupart des méthodes de commande est de type commande linéaire, on cite la commande vectorielle classique (régulateur PI) [FUR92] [RAS07][GU04] ou la commande par retour d’état [ZHE07].
Récemment, de nouvelles commandes non linéaires pour le contrôle sans capteur mécanique sont apparues. La commande modes glissants d’ordre
15
supérieur quasi-continue a été proposée [CIA10]. La commande de type backstepping a été présentée [KE05] avec la mesure de la position pour estimer la vitesse.
Cependant, à notre connaissance, les méthodes de commandes sans capteur mécanique proposées dans la littérature sont testées et évaluées dans des conditions de fonctionnement à haute vitesse de la machine alors que les difficultés sont essentiellement à basse vitesse à cause de l'inobservabilité de la machine. Nous avons aussi constaté que pour ces lois de commandes sans capteur mécanique proposées, il n'existait pas de démonstration d’inobservabilité et de convergence globale de l'ensemble "Commande - Observateur" en boucle fermée excepté quelques travaux.
III.
Organisation du manuscrit
Dans cette thèse, on s’intéresse à la commande avec et sans capteur mécanique du MSAP, en utilisant différentes commandes existantes dans la littérature. L’objectif fixé est de concevoir des lois de commandes robustes et de les associer à des observateurs afin de réaliser la commande sans capteur mécanique du moteur synchrone à aimants permanents, ainsi que des tests de robustesse et de procéder à la validation expérimentale de l’ensemble (Commande - observateur)
La démarche adoptée est la suivante:
• La première partie du travail est consacrée à la commande non linéaire avec
capteur mécanique. Cette partie s’articule autour de trois chapitres.
• La deuxième partie est dévouée à la conception des lois de commande sans
capteur mécanique, traitée dans les trois derniers chapitres.
Le premier chapitre est consacré à la description de la machine synchrone à aimants permanents et ses différentes applications. Les différents modèles d’état non linéaires de cette machine, dans le repère fixe (α−β) et dans le repère tournant (d−q), sont traités. Le principe de la commande vectorielle et son application à la MSAP est présenté et la commandabilité de la MSAP est étudiée.
Le deuxième chapitre concerne la commande à structure variable pour cela nous avons choisi l’approche non linéaire par mode glissant (MG). L’application pour la commande en vitesse de la MSAP est synthétisée. On remarque cependant que le signal de commande obtenu présente des variations brusques dues au phénomène de broutement (Chattering). Ceci nous a poussés à effectuer une hybridation entre la logique floue et le mode de glissement, afin de réduire les effets du phénomène de broutement et d’améliorer davantage les performances de contrôle du MSAP. Plusieurs
16
résultats de simulation obtenus sur différentes trajectoires sont fournis et commentés.
Le troisième chapitre est consacré à la théorie de contrôle dite backstepping. Elle offre une méthode systématique pour effectuer la conception d'un contrôleur, pour des systèmes non linéaires. Une démonstration de convergence par la théorie de Lyapunov de la loi de commande sera détaillée L'avantage principal de cette méthode est de garantir la stabilité de l’ensemble du système (contrôleur et moteur), mais présente cependant quelques inconvénients. Sa structure, qui s'apparente à celle d'un (proportionnel-dérivé) PD, est très sensible au bruit de mesure. En régime permanent, des erreurs statiques persistent. Des solutions pour régler ces problèmes ont été apportées, une action intégrale a été introduite dans le contrôleur. Des résultats de simulation obtenus sur différents profils seront donnés et commentés.
Le chapitre quatre porte essentiellement sur les rappels des notions de base d’observabilités des systèmes linéaires et non linéaires ainsi qu’à la présentation, en particulier, de synthèses d’observabilités quand le problème des entrées pour le systèmes non linéaire est posé (observabilité non uniforme) et la notion d’observabilité uniforme. Ensuite nous nous intéresserons plus spécifiquement au problème de l’observation de l’état de la MSAP. A travers cette étude, nous pourrons conclure sur les propriétés d’observabilité de la MSAP. En d’autres termes, quand est ce qu’il est possible de reconstruire les variables d’état électriques (courant) et mécaniques (vitesse, position et couple de charge) ?. La deuxième partie est consacrée à l’étude des performances de la commande sans capteur basée sur l’observation d’état associé à un régulateur classique PI et un régulateur backstepping. Nous avons choisi l'observateur de Luenberger appliqué pour l’estimation des grandeurs mécanique. L’étude de la robustesse vis-à-vis des incertitudes paramétriques ou de bruits a été menée et des résultats de simulation obtenus sont présentés et commentés.
Le cinquième chapitre traite le filtre de Kalman étendu (FKE) et ses atouts pour remédier aux insuffisances de l’observateur de Luenberger. On associe la commande par PI et Backstepping à l’observateur FKE pour effectuer la commande sans capteur mécanique de la MSAP. Une démonstration sera faite au fur et à mesure pour chaque cas étudiés et des résultats de simulation seront fournis et commentés.
Afin de valider nos résultats de simulation, un sixième chapitre destiné à la mise en œuvre expérimentale des lois de commande associées à l’observateur de vitesse complète ce travail afin de tester le système en temps réel. Les
17
résultats expérimentaux obtenus sont présentés ainsi que des tests de robustesse montrant ainsi la validité des algorithmes de commande appliqués au MSAP.
Finalement, une synthèse des travaux réalisés conclut ce travail tout en proposant également plusieurs perspectives de prolongement du travail réalisé, ainsi les axes futurs à exploiter pour la poursuite des travaux sur la commande sans capteur mécaniques des MSAP à faible vitesse.
18
Références
[AKR08] A. Akrad, M. Hilairet, D. Diallo. A sensorless PMSM drive using a two
stage extended Kalman estimator 34th Annual Conference of IEEE
Industrial Electronics, IECON 2008, pp. 2776-2781, Orlando, USA, 10-13 Nov. 2008.
[ARI07] A. Arias, D.Saltiveri, C.Caruana, J. Pou, J.Gago and D. Gonzalez.
Position estimation with voltage pulse test signals for Permanent Magnet Synchronous Machines using Matrix Converters, Compatibility in Power
Electronics, CPE’07, pp 1-6, 29 May-1June, 2007.
[ÂST84] K. J. Åström, B. Wittenmark, “Computer Controlled Systems”, PrenticeHall, Inc, Englewood Cliffs, 1884.
[BAL91] J. Balas, J. C. Doyle, K. Glover, A. Packard and R. Smith, “μ- Analysis and Synthesis toolbox (μ-Tools), the Mathworks Inc, 1991.
[BAR98] G. Bartolini, A. Ferrara, and E. Usai, “Chattering avoidance by
secondorder sliding mode control”, IEEE Trans. Automat. Control, 1998,
43(2), p.241-246.
[BEN01] A, Benchaib and Edwards. C, “An Input-Output Linearization Based
Sliding Mode Scheme For Induction Motor Control Using A Sliding Mode Flux Observer”, 2001, EPE.
[BEN98] A, Benchaib, “Application des modes de glissement pour la commande en
temps reel de la machine asynchrone”, Thèse de l’Université de
Picardie Jules Vernes, 1998, 134 p.
[BEN00] A. Bennaskeur ‘Aspects de l'application du backstepping adaptatif à la
commande décentralisée des systèmes non linéaires’ Thèse Ph.D, Univ
Laval Quebec, Fevrier 2000.
[BES98] G. Besancon and H. Hammouri. On Observer Design for Interconnected
Systems, Journal of Mathematical Systems, Estimation and Control,
Vol. 8, 1998.
[BOL93] S. Bolognani, E. Ognibeni, M. Zigliotto, “Sliding Mode Control of the
Energy Recovery Chopper in a C-Dump Switched Reluctance Motor Drive”,
IEEE Transactions on Industry Applications, 1993, Vol. 29, No 1, p181-186.
[BOU04] Z. Boulbair, M. Hilairet, F. Auger and L. Loron. Sensorless control of a
PMSM using an efficient extended Kalman Filter, International
Conference of Electrical Machines ICEM, 2004.
[BOS85] B. K. Bose, ‘Sliding mode control for induction motor.’ IEEE IAS Annual Meeting, 1985. p 479-486.
19
[BOS88] B. K. Bose, ‘ A high performace inverter- fed drive system of an interior
permanent magnet synchronous machine.’ IEEE Tras. Ind. Appl. Vol 3 N°
6 Nov/Dec 1988 p 987-997.
[BÜH86] H. R. Bühler, “Réglage par mode de glissement”, Presses Polytechniques et Universitaires Romandes, 1986.
[CIA10] L. Ciabattoni, M.L.Corradini, M. Grisostomi, G. Ippoliti, S. Longhi and G. Orlando. Robust Speed Estimation and Control of PM Synchronous
Motors via quasi-sliding modes, 49th CDC 2010, Atlanta, USA, 15-17
Dec-2010
[CAL99] C. Califano, S. Monaco and D. Normand-Cyrot, “On the problem of feedback linearization”, 1999, Vol 36, Issue 1, 12, p 61-67.
[CHE03] Z. Chen, M. Tomita, S.Doki and S. Okuma, An Extended Electromotive
Force Model for Sensorless Control of Interior Permanent-Magnet Synchronous Motors, IEEE transactions on Industrial Electronics, Vol.
93, No. 2, pp. 288-295, Avril, 2003.
[DAO91] R.Dhaouadi, N.Mohan and L. Norum. Design and Implementation of an
Extended Kalman Filter for the State Estimation of a Permanent Magnet Synchronous Motor, IEEE Transactions on Power Electronics, Vol. 6,
No. 3,pp. 491-497, July, 1991.
[DOY89] J. C. Doyle, K. Glover, P. P. khargonekar, “State-space Solutions to
Standard H2 and ¥ H Control Prblem”, Transactions on Automatic
Control, 1989, Vol 34, p 831-846.
[DRA69] B. Drazenovic, “the invariance condition in sliding mode systems” automatica, Vol.5, p.287-295, Pergamon Press, 1969.
[EDW69] C. Edwards and S. K. Spurgeon, “On the limitations of some variable
structure output feedback controller designs”, Automatica, 2000, Vol 36,
Issue 5, p 743-748.
[EFE67] M.ö. Efe et al “Variable structure control of a class of uncertain systems” Automatica, 2004, Vol 40, p 59 – 64.
[EME67] S. V. Emel’yanov, “Variable Structure Control Systems”, Moscow, Nauka (in Russian), 1967.
[ETI02] E.Etien, S. Cauet, L. Rambault, G. Champonois, “Control of an
induction motor using sliding mode linearization”, Int. J. Appl. Math.
Comput. Sci,2002, Vol.12, No.4, p 523–531
[EZZ10] M. Ezzat, A. Glumineau and F. Plestan. Sensorless speed control of a
permanent magnet synchronous motor : high order sliding mode controller and sliding mode observer, 8th IFAC Symposium on Nonlinear Control
20
[FAQ03] A. Faqir, Commande à structure variable d’un entraînement à machine
asynchrone soumis à un environnement mécanique variable”, Thèse de
l’Université de Picardie Jules Vernes, 2003, 124 p.
[FRA87] A. Francis, “A Course in ¥ H Control Theory”, Springer Verlag, Berlin,1987
[FRE99] R.A .Freeman, M. Kesic and P. V. Kokotovi, “Robust of Adaptive
Nonlinear Control to bounded Uncertainties”, Automatica, 1998, Vol
38,Issues 4-5, p 1227-1230.
[FUR92] T.Furuhashi, S.Sangwongwanich and S. Okuma. A
Position-and-Velocity Sensorless Control for Brushless DC Motors Using an Adaptive Sliding Mode Observer, IEEE Transactions on Industrial Electronics,
Vol. 39, No. 2, pp. 89-95, April, 1992.
[GIR10] A. El Magri and F. Giri and A. Elfadili, An Interconnected Observer for
Wind Synchronous Generator, 8th IFAC Symposium on Nonlinear
Control Systems, University of Bologna, Italy, September 1-3, 2010. [GU04] J. Gu, Y. Zhang, Z. Wu and J. Ying. Rotor Position and Velocity
Estimation for PMSM Based on Sliding Mode Observer 4th International
Power Electronics and Motion Control Conference, IPEMC, Vol.3, pp. 1351-1355, 14-16 Aug., 2004.
[HAJ96] S. Hajri, “Commande dynamique par mode de glissant application à la
robustification des processus complexes”, Thèse de Doctorat, Lille,
Université des sciences et technologies de Lille, 1996, 222p.
[HAL10] K.K. Halder, N. K. Roy and B.C. Ghosh. Position Sensorless Control for
an Interior Permanent Magnet Synchronous Motor SVM Drive with ANN Based Stator Flux Estimator, International Journal of Computer and
Electrical Engineering, Vol. 2, No. 3, pp. 1793-8163, June, 2010.
[INA02] N. Inanc, “A new sliding mode flux and current observer for direct field
oriented induction motor drives”, Electric Power Systems Research, 2002,
Vol 63, p 113-118.
[ITK02] U. Itkis, “Control systems of variable structure”, Wiley, New-York, 1976. [KE05] S.S.Ke and J.S. Lin. Sensorless Speed Tracking Control with Backstepping
Design Scheme for Permanent Magnet Synchronous Motors Proceeding
IEEE Conference on Control Applications, Toronto, Canada, 28-31August, 2005
[KRI95] M. Krstic, I. Kanellakopoulos, and P. Kokotovic, “Nonlinear and
adaptative control design”, Wiley-Interscience, NY, 1995.
[LAS04] C. Lascu, I. Boldea and F. Blaabjerg, “Direct Torque Control of
Sensorless Induction Motor Drives: A Sliding-Mode Approach”, IEEE
21
[LOU02] A. G. Loukianov, “Robust Block Decomposition Sliding Mode Control
Design”, Mathematical Problems in Engineering,2002, Vol 8, p.
349-365
[MAH99] M.O. Mahmoudi, N. Madani, M.F. Benkhoris, and F. Boudjema, “Cascade sliding mode control of a field oriented induction machine drive”, The European Physical Journal Applied Physics, 1999, Vol 7, p 217-225.
[MAR95] R. Marino, P. Tomei, “Nonlinear control design”, Printice-Hall, Inc.1995. [MOR02] S. Morimoto, K. Kawamoto, M. Sanada and Y. Takeda. Sensorless
Control Strategy for Salient-pôle PMSM Based on Extended EMF in Rotating Reference Frame, IEEE Transactions Industrial Applications,
Vol. 38, No. 4, July/August, 2002.
[MIH02] Y.Mihoub, “Commande par réseau de neurone d’une machine asynchrone”, Thèse de magister, Université des sciences et technologies d’Oran – MB-, 2002
[MIH12] Y.Mihoub, “Commande floue adaptative de la machine asynchrone”, Thèse de Doctorat en science, Université des sciences et technologies d’Oran –MB-, 2012
[MIR07] R. S. Miranda, C. B. Jacobina, E. M. Femandes, A. M. N. Lima, A.C. Oliveira and M. B. R. Correa. Parameter and Speed Estimation for
Implementing Low Speed Sensorless PMSM Drive System Based on an Algebraic Method, 22nd Annual IEEE Applied Power Electronics
Conference, APEC 2007, pp. 1406-1410, Anaheim, CA, USA, 25 Feb.-1 March, 2007.
[NAH01] B.Nahid-Mobarakeh, ‘Commande vectorielle sans capteur mécanique des
machines synchrones a aimants : Méthodes, convergence, robustesse, Identification "en ligne" des paramètres’, L’Université de Nancy,
L’Institut National Polytechnique de Lorraine, Nancy, France, 2001. [PAN94] C-T. Pan, T-Y Chang and C-M, Hong, “A Fixed Structure Discrete Time
Sliding Mode Control for Induction Motor Drives”, IEEE Transactions
on Energy conversion, 1994, Vol. 9, No 4, p645-651.
[PÉR02] M. Pérez de la Parte and E. F. Camacho, “Application of a Predictive
Sliding Mode Controller to a heat exchanger, IEEE International
Conference on Control Applications”, 2002, p 1219-1224.
[PER07] J. Persson, M. Markovic and Y.Perriard. ‘A New Standstill Position
Detection Technique for Nonsalient Permanent-Magnet Synchronous Motors Using the Magnetic Anisotropy Method’, IEEE Transactions on
22
[PAP06] K. Paponpen and M. Konghirun. An Improved Sliding Mode Observer
for Speed Sensorless Vector Control Drive of PMSM, 5th International
Power Electronics and Motion Control Conference, IPEMC CES/IEEE, Vol. 2, pp. 1-5, 14-16 Aug., 2006.
[TRA08] D. Traore. Commande non linéaire sans capteur de la machine asynchrone, Thèse de doctorat, Ecole Centrale de Nantes, Sept.2008.
[RAC07] M.Rashed, P.F. A. MacConnell, A. F.r Stronach, and P.Acarnley.
Sensorless Indirect-Rotor-Field-Orientation Speed Control of a Permanent-Magnet Synchronous Motor With Stator-Resistance Estimation, IEEE
Transactions on Industrial Electronics, Vol. 54, No. 3, pp. 1664-1675, June, 2007.
[UTK77] V, I. Utkin, “Variable structure systems with sliding modes”, IEEE Transactions on Automatic Control, 1977, Vol AC-22, No 2, p 212-222. [UTK99] V. Utkin, “Sliding mode control in electromechanical system”. Taylor &
Francis 1999
[UTK93] V. I. Utkin , “Sliding Mode Control Design Principles and Applications
to Electric Drives”, IEEE Transactions on Industrial Electronics, 1993,
Vol 40, NO 1, p 23-36.
[VAS08] C. I.Vasilios and I. M. Nikolaos. PMSM Sliding Mode Observer for Speed
and Position Estimation Using Modified Back EMF, 13th Power
Electronics and Motion Control Conference, EPE-PEMC, pp. 1105 - 1110 , Poznan, 1-3 Sept.,2008.
[VAS66] P.Vas, : ‘ Vector control of AC machines and drives’ present and future IEEE 1966 p 67-74
[XU03] Z. Xu and M.F. Rahman. Sensorless sliding mode control of an interior
permanent magnet synchronous motor based on extended kalman filter, 5th
International Conference on Power Electronics and Drive Systems, PEDS, Vol. 1, pp. 722-727, 17-20 Nov., 2003.
[YAN02] Z. Yan and V. Utkin. Sliding mode observers for electric machines – An
Overview, 8th IEEE Annual Conference of the Industrial Electronics
Society, IECON,Vol.1, pp. 1842-1847, 5-8 Nov., 2002.
[ZAL10] D. Zaltni, M. Ghanes, J. P. Barbot and M. N. Abdelkrim. A HOSM
Observer with an Improved Zero-speed Position Estimation Design for Surface PMSM Sensor-less Control , 2010 IEEE International Conference
on Control Applications, Part of 2010 IEEE Multi-Conference on Systems and Control Yokohama, Japan, September 8-10, 2010.
23
[ZEN07] Z.Zheng, M. Fadel, and Y. Li. High Performance PMSM Sensorless
Control with Load Torque Observation, The International Conference on
Computer as a Tool, EUROCON, pp. 1851-1855, Warsaw, 9-12 September, 2007.
[ZHA07] S. Zhao and X. Peng. A Modified Direct Torque Control Using Space
Vector Modulation (DTC-SVM) for Surface Permanent Magnet Synchronous Machine (PMSM) with Modified 4-order Sliding Mode Observer, Proceedings of IEEE International Conference on
CHAPITRE I
DESCRIPTION ET COMMANDE
VECTORIELLE DU MSAP
24
Sommaire
I.1 Introduction
I.2 Applications industrielles d’un MSAP I.2.1. Domaine Ferroviaire
I.2.2. Domaine de la propulsion navale I.2.3. Domaine de l’avionique
I.2.4. Domaine du véhicule électrique ou hybride
I.3 Modélisation du moteur synchrone à aimants permanents I.3.1. Equations électriques
I.3.2. Equations mécaniques
I.3.3. Modèle d’état d'un MSAP dans le repère d-q I.3.4. Modèle d’état d'un MSAP dans le repère fixe α−β I.4 Modélisation de l’onduleur de tension
I.5 La commandabilité du MSAP I.5.1. Accessibilité forte
I.5.2. Application à la MSAP
I.6 Stratégies de commande du MSAP I.6.1. Réglage assurant un couple maximal
I.6.2. Réglage assurant un facteur de puissance unitaire I.7 Commande scalaire du MSAP
I.7.1. L'amplitude des courants de référence
I.7.2. Le déphasage des courants par rapport aux forces électromotrices
I.8 Commande vectorielle du MSAP
I.8.1. Principe de la commande vectorielle
I.8.2. Les différents types de la commande vectorielle du MSAP I.8.2.1. Commande vectorielle simplifiée
I.8.2.2. Commande vectorielle indirecte I.8.2.3. Commande vectorielle directe I.9 Calcul des régulateurs
I.9.1. Régulateur du courant I.9.2. Régulateur de vitesse
I.9.3. La fonction d’anti-saturation (anti-windup) I.10 Résultats de simulation
I.11 Conclusion
25
I.1. Introduction
L’électrotechnique moderne a été bouleversée par deux phénomènes, l’apparition sur le marché d’aimants de plus en plus performant et le développement de l’électronique de puissance de mieux en mieux adaptée aux exigences industrielles [NOU94].
Les premiers aimants exploités sont les alnicos (aimants métalliques), ensuite les ferrites qui sont des aimants robustes, surs et peu coûteux. Depuis une vingtaine d’années les aimants à base de terres rares ( SmoCo5) et (Sm2Co17) ont fait leur apparition. Ces aimants sont très appréciés par les constructeurs et ont contribué à la conception des machines synchrones à aimants permanents MSAP. Ils permettent de réduire l’inertie du rotor, d’avoir des couples volumiques et massiques élevés et autorisent des courants statoriques élevés [CLE93].
En dehors de ses avantages; l’association des machines à aimants permanents aux convertisseurs de puissance fonctionnant selon un principe assimilable à celui de la machine à courant continu assure des performances appréciables exigées dans de nombreuses applications dans divers domaines, tel que la technologie de l’espace (actionneurs d’aviation, de satellites), la télécommunication, la robotique, les machines outils…etc. [BOU98, BOU95, CHI99]
Ce chapitre est consacré à la description des ensembles convertisseurs-machine MSAP et à leurs applications. Ainsi nous rappelons la commande vectorielle des MSAP, tout en étudiant la commandabilité de ces machines.
I.2.
Applications industrielles d’un MSAP
L’utilisation accrue d’actionneurs électriques remplaçant des actionneurs pneumatiques ou hydrauliques dans les systèmes autonomes ou embarqués (avions, automobile et propulsion navale), a permis d’augmenter la flexibilité de contrôle, de réduire les coûts d’exploitation grâce aux économies d’énergie et à la réduction des coûts de maintenance par la suppression des circuits d’alimentation en air ou en huile, de gagner en compacité et de réduire les émissions de gaz.
A titre d’exemple on cite quelques applications de la MSAP dans les systèmes embarqués.
I.2.1. Domaine Ferroviaire
Les MSAP sont de plus en plus présent dans les chaînes de traction ferroviaire ainsi que dans les véhicules électrique ou hybrides [ZER06] du fait notamment de leur faible encombrement et du fort couple massique. Elle
26
est par exemple utilisée dans les nouvelles Automotrices Grande Vitesse AGV qui sont un projet de train à grande vitesse de la société Alstom qui permet d’optimiser l’espace et de réduire la masse des trains [AGV07]. Il devrait entrer en service en 2010.
I.2.2. Domaine de la propulsion navale
Dans le domaine maritime, au début des années 90 est apparue l’idée de combiner les avantages de manœuvrabilité des gouvernails mécaniques avec la flexibilité de la propulsion électrique. L’idée de base consiste à loger le moteur électrique de propulsion dans une nacelle, appelée POD (Propulsors with Outboard Drives) fixée sous la coque à l’extérieur du navire. Ce moteur va entraîner une hélice à pas fixe. Dans la propulsion par POD, afin d’améliorer le rendement hydrodynamique, un faible diamètre de “bulbe” est nécessaire. Cela nécessite un moteur qui, dispose d’un couple volumique et massique important. Les MSAP à enroulements polyphasés se sont naturellement imposés dans ce domaine [FIL01].
I.2.3. Domaine de l’avionique
Les évolutions de l’électronique de puissance ont permis d’introduire des actionneurs électromécaniques spécifiques dans le domaine de l’avionique. Ce développement contribue à la réduction de la pollution sonore et de la pollution atmosphérique (moins de CO2 et moins de fluide). Les contraintes de limitation de la masse embarquée favorisent l’utilisation des actionneurs compacts à fort couple massique et volumique tels que les MSAP [BOT00]. Néanmoins à l’heure actuelle, les EHA (Electro Hydrostatic Actuator) sont les actionneurs les mieux adaptés aux architectures actuelles des avions de ligne car elles permettent de bénéficier des avantages des moteurs électriques et des forces importantes développées par les vérins hydrauliques [LAN06]. I.2.4. Domaine du véhicule électrique ou hybride
Le secteur des transports routiers est responsable du tiers des émissions de gaz à effet de serre. C’est également un secteur consommateur de ressources fossiles dont l’épuisement est annoncé à l’horizon 2050 [MUL98]. La communauté internationale a donc proposé des règles au sein du protocole de Kyoto pour limiter les émissions de gaz polluants. Ces règles ont été renégociées au sommet de Copenhague en 2009. La part importante du secteur des transports a incité les constructeurs automobiles à développer des solutions alternatives au moteur à combustion interne.
27
Les véhicules à propulsion hybride (moteur thermique et moteur électrique) ou à propulsion électrique sont les solutions les plus prometteuses à moyen et long terme si les technologies de stockage d’énergie embarquée et les énergies renouvelables deviennent efficientes et compétitives. Tous les constructeurs ont développé ou commercialisé des modèles de véhicules hybrides ou électriques. Parmi les moteurs électriques, les moteurs synchrone et asynchrone [CHA08], [ZHU07] semblent être à l’heure actuelle les plus prometteurs.
Néanmoins au delà des performances, les chaines de conversion d’énergie électrique devront garantir d’une part la sûreté de fonctionnement du système en passant par une conception judicieuse des composants le constituant, et d’autre part développer la connaissance sur les défauts des composants et leurs conséquences afin de mettre en place les stratégies de contrôle adaptées[LIU09].
I.2.5. Domaine de l’énergie de l’éolienne
Les premiers générateurs éoliens étaient couplés directement au réseau, ce qui imposait une vitesse de rotation constante. Le développement de l’électronique de puissance a rendu possible le couplage de ces générateurs éoliens au réseau par l’intermédiaire de convertisseurs d’électronique de puissance fonctionnant à vitesse variable, afin d’extraire le maximum de puissance du vent [LEC04].
La figure I.1 montre le schéma d’une éolienne à vitesse variable gouvernée par une machine synchrone à aimants permanents destinée à alimenter un réseau ou des charge isolées [CIM05].
28
I.3. Modélisation du moteur synchrone à aimants permanents
L‘étude des systèmes électromagnétiques ne peut se faire que moyennant des hypothèses ou des transformations mathématiques afin d’obtenir un ou plusieurs modèles simplifiés. Les hypothèses usuelles données dans la majorité des références sont adoptées comme suit [BOS02, ARR06, NAH01, LIP98]
Le circuit magnétique n’est pas saturé et l’effet de Peau et d’hystérésis est négligé. Les flux sont des fonctions linéaires des courants qui leur donnent naissance.
Le circuit magnétique est parfaitement feuilleté, que seuls les enroulements (inducteur et induit) sont parcourus par des courants, ce qui permet de négliger les courants de Foucault.
La densité de courant est uniforme dans les sections des conducteurs élémentaires afin de négliger l’effet pelliculaire.
La force magnétomotrice créée le long de l’entrefer dans chaque phase de l’induit est à répartition spatiale sinusoïdale, on ne considère que le fondamental et on néglige les harmoniques d’espace.
On assimile le système d’alimentation à une source triphasée délivrant des tensions symétriques et équilibrées et dont la composante homopolaire est nulle.
I.3.1. Equations électriques
A partir de la représentation du MSAP de la figure (I.2), les équations électriques dans un repère fixe lié au stator sont décrites par :
(1.1)
Les flux totaux statoriques qui sont exprimés par :
avec :
cos cos cos