JEAN-FRÉDÉRICK FAURE
,
Etude des caractéristiques hydrodynallliques d'une
aile oscillante
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de maîtrise en génie mécanique
pour l'obtention du grade de Maître ès sciences (M.Sc.)
FACULTÉ DES SCIENCES ET DE GÉNIE UNIVERSITÉ LAVAL
QUÉBEC
2009
Résumé
Ce mémoire s'inscrit dans le cadre plus général d'un projet multidisciplinaire mené à l'Université Laval sur la technologie des aéro/hydrogénérateurs à ailes oscillantes. Cette partie du projet s'intéresse plus particulièrement à une mesure expérimentale des forces s'exerçant sur une aile oscillante. Pour y arriver, cette étude se découpe en deux phases bien distinctes.
Tout d'abord, il s'est révélé primordial de caractériser et d'optimiser au mieux l'en-vironnement de travail. Au cours de cette première phase, la mise en place de pertes de charge accompagnée par des mesures de vitesse dans le canal furent effectuées. De même, le système mécanique devait être piloté afin de reproduire le plus fidèlement possible les mouvements demandés.
Par la suite, la deuxième phase impliquait la création puis l'utilisation d'un instru-ment de mesure. Une comparaison avec des résultats issus de simulation numérique a alors permis de valider le concept de la balance hydrodynamique. Toutefois, plusieurs problèmes furent identifiés et des recommandations faites en vue de travaux futurs.
Abstract
This master thesis is in line with a multidisciplinary project at Laval University about oscillating wings technology. This work takes particularly an interest in experi-mental measurement of forces on an osciIlating wing. To achieve this goal the study can be divided into two separate parts.
First of aIl, it is of great importance to qualify and optimize work background. During the first phase, the setting-up of pressure losses and velocity measures were done. Mechanical system should even be guided to reproduce the mostaccurately possible the desired movements.
Thereafter the second phase involved the creation and the use of an measuring instrument. A comparison with sorne results that are coming from numerical simulations enabled to validate the hydrodynamic balance concept. Nevertheless, sorne problems were identified and so several advices were given for future works.
A vant-propos
Tout d'abord je tiens à remercier mon directeur de maîtrise, le professeur Jean Lemay. Sa disponibilité, ses conseils et son expertise m'ont grandement aidé à progresser dans mon travail. Merci également à mon co-directeur, le professeur Guy Dumas pour l'accueil au sein de son groupe et qui, par la pertinence de ses commentaires, a su faire progresser mes recherches.
Je remercie aussi Claire Deschênes et son équipe du laboratoire de machines hydrau-liques (LMAH) qui ont mis à notre disposition un canal hydrodynamique. Je ne pourrais en outre passer sous silence la contribution des équipes de l'atelier du département de génie mécanique, de l'atelier d'électronique et du bureau de design tout au long de ce projet.
J'adresse un merci tout spécial à toutes les personnes du secrétariat du département qui m'ont permis de me concentrer sur mon travail et ne pas me perdre lors de mes nombreuses démarches administratives.
Finalement, un dernier remerciement à ma famille qui, malgré la distance, m'a tou-jours encouragé et à ma compagne Vicky dont le soutien sans faille fut source de moti-vation.
A ma famille qui m'a indiqué la bonne voie en me rapellant que la volonté fait toujours les grands hommes ...
Apprenons à rêver, Messieurs, et peut-être alors verrons-nous la vérité. Auguste K ékulé (1865)
Table des matières
/
Résumé Abstract Avant-Propos Table des matières Liste des tableaux Liste des figures Nomenclature 1 Introduction
1.1 Concept de base d'une turbine à ailes oscillantes 1.2 Revue de littérature . . . .
1.2.1 Mode propulsion . . . . 1.2.2 Mode extraction d'énergie . . . .
1.3 Le projet d'hydrogénérateur en cours à l'Université Laval 1.4 Objectifs et structure du mémoire . . . .
2 Description générale de la balance hydrodynamique 2.1 Éléments sensibles: jauges de déformation
2.2
2.3
2.4
2.1.1 Montage en pont . . . . 2.1.2 Disposition des jauges . . . . Modélisation théorique de la poutrelle instrumentée 2.2.1 Données de départ
2.2.2 Modèle théorique . . . . Simulation numérique. . . . 2.3.1 Vérification de l'hypothèse poutre . 2.3.2 Simulation sur l'instrument de mesure 2.3.3 Simulation Aile - Instrument de mesure. Fabrication . . . . ii iii IV viii ix xiii xiv 1 2 3 4 6 9 Il 13 13 13 14 19 19 19 21 21 24
26
282.4.1 Usinage de la balance hydrodynamique 2.4.2 Pose des jauges et câblage . . . . . . 3 Étalonnage de la balance hydrodynamique
3.1 Efforts tranchants . . . . . . . . 3.1.1 3.1.2 3.1.3 3.1.4 Matériel . . . . Description du montage Procédures d'étalonnage Résultats . 3.2 Moment de torsion . . . . 3.2.1 Matériel...:... 3.2.2 Description du montage 3.2.3 3.2.4 Procédures d'étalonnage Résultats .
3.3 Pollution des voies . . . .
4 Mise en oeuvre et caractérisation du canal hydrodynamique 4.1 Description du canal . . . .
4.2 Installation de pertes de charge . 4.2.1 Pertes de charge en sortie 4.2.2 Pertes de charge en entrée 4.3 Mesures de vitesse 4.3.1 Tube de Pitot . 4.3.2 LDV . . . vu 28 28 30 30 30 31 31 33 34 34 34 35 36 37 39 39 40 41 42 42 42 44 5 Montage à ailes oscillantes et système d'acquisition de données 49
5.1 Montage à ailes oscillantes . . . 49
5.1.1 Description du montage . . . . . . 49
5.1.2 Électronique... 51
5.2 Système d'acquisition et de traitement des données 55
5.2.1 Acquisition des données 55
5.2.2 Traitement des données. 6 Résultats et analyse
6.1 Problèmes....
6.2 Mesures en régime stationnaire . . . . 6.2.1 Utilisation des plaques de bouts d'ailes 6.2.2 Considérations hydrodynamiques . 6.2.3 Comparaison numérique/théorique .. 6.3 Mesures en régime instationnaire . . . .
6.3.1 Potentiomètre de pilonnement versus accéléromètre
56 63 63 66 66 67 68 70
70
6.3.2 Mouvement complet 7 Conclusion
Bibliographie A Plans
B Programmation du contrôleur
B.l Mise en mouvement du montage: #EXEQ . . . B.2 Mise à zéro du mouvement de tangage: #HOMEX B.3 Calcul des positions et vitesses: #MVTSIN
C Exemple d'un essai rejeté
VIll 70 81 84 86 94 94 95 96 97
"
Liste des tableaux
1 Liste des variables utilisant l'alphabet latin. XIV
2 Liste des variables utilisant l'alphabet grec xv
2.1 Réponses du pont de jauges 1 à 4 aux trois efforts. . 17 2.2 Réponses du pont de jauges 5 à 8 aux trois efforts. . 17 2.3 Réponses du pont de jauges 9 à 12 aux trois efforts. 18 2.4 Tableau de dimensionnement de la poutrelle. . . . 21 3.1 Pentes en m V
IN
obtenues pour chacune des balances soumises àfz.
33 3.2 Pentes en m VIN
obtenues pour chacune des balances soumises àrfx.
.
34 3.3 Pentes en mV I(N.mm) obtenues pour chacune des balances soumises àMt
y . . . . . 373.4 Récapitulatif des coefficients d'étalonnage en N IV ou N.m/V selon
l'ef-fort considéré: . . . . . . 38
5.1 Calibration de l'accéléromètre en VI g. 54
5.2 Tableaux récapitulatifs des masses et volumes. 58 6.1 Tableaux de données utiles aux calculs pour les essais en mouvement
Liste des figures
1.1 Mouvement de queue d'un cétacé. . . . . . . . . . . . . .. 2 1.2 Mouvement d'une aile oscillante de corde c avec un déphasage de 90 0
sou-mis à un écoulement de vitesse Uoo (tiré de Kinsey et Dumas [9]). . .. 3 1.3 Courbes du coefficient de portance en fonction du temps et de la
fré-quence réduite k pour une plaque soumise à un mouvement sinusoïdal de pilonnement tirées des travaux de Brunton et al. [2]. . . . . . . . . . .. 4 1.4 Évolution des coefficients de portance et de poussée d'une aile N ACA
0012 soumise à des mouvements combinés de pilonnement et de tangage d'après les travaux de Pedro et al. [16]. . . . . . 4 1.5 ' Appareillage utilisé par Anderson et al. [1] (schéma adapté). . . .. 5 1.6 Appareillage utilisé par Hover et al. [7] (schéma adapté). . . . . . . .. 6 1.7 Montage expérimental « Wingmill » tiré des travaux de McKinney et
DeLaurier [15]. . . . 7
1.8 Générateur Stingray [19]. . . 7 1.9 Générateur Pulse Tidal [20] . . . " . . 8 1.10 Vue de dessus des deux ailes tandem tirée des travaux de Jones et al. [8]. 9 1.11 Comparaison des résultats numériques et expérimentaux en traçant le
coefficient de puissance Cp en fonction de la fréquence réduite k == 2;~C tirée des travaux de Jones et al. [8]. . . . .. 9 1.12 Isocontours d'efficacité dans l'espace paramétrique de fréquence réduite
f* == felUe et d'amplitude de tangage
Ba
pour un profil d'aile NACA 0015 avec le pivot au tiers de corde (Re == 1 100, Hale == 1) d'après les travaux de Kinsey et Dumas [9]. . . . . . . .. 10 1.13 Coefficients de portance et de traînée typiques pour une aile oscillanteen extraction d'énergie d'après les travaux de Kinsey et Dumas [9]. 10 1.14 Prototype de table fabriqué à l'Université Laval. . . . . . . . . Il 2.1 Quatre jauges de contraintes en pont de Wheatstone complet. 14 2.2 Représentation en couleur du positionnement des jauges selon l'effort
qu'elles doivent mesurer. . . . . 2.3 Sections de la poutre au niveau des encastrements. 2.4 Dimensions de la balance hydrodynamique . . . .
15 21
22
2.5 Visualisation des contraintes de cisaillement exercées par un couple de torsion de 6000 N.mm suivant
y
sur une poutre de 150 mm dont l'amin-Xl
cissement a pour valeur lt
==
1.5 mm (ITmaxl ~ 13.27 MPa). . . . . . .. 22 2.6 Visualisation des contraintes de cisaillement exercées par un efforttran-chant de 10.8 N suivant
x
sur une poutre de 150 mm dont les amincis-sements ont pour valeurs lx et lz égales à 0.5 et 1 mm respectivement (ITmaxl ~ 0.89 MPa). . . . . . . . .. 23 2.7 Visualisation des contraintes de cisaillement exercées par un efforttran-chant de 78 N suivant
z
sur une poutre de 150 mm dont les amincis-sements ont pour valeurs lx et lz égales à 0.5 et 1 mm respectivement (ITmaxl ~ 4.18 MPa). . . . . . . . . . . . . . . 23 2.8 Visualisation des contraintes de cisaillement exercées par un efforttran-chant de 78 N suivant
z
sur une poutre de 150 mm dont les amincisse-ments sont les mêmes et égaux à lx (ITmaxl ~ 6.62 MPa). . . . . . . .. 24 2.9 Visualisation des contraintes de cisaillement exercées par un couple detorsion de 6000 N.mm suivant ysur l'instrument de mesure (ITmaxl ~ 11.8 MPa). . . . . . . . . . . . . . . . . . . 25 2.10 Visualisation des contraintes de cisaillement exercées par un effort
tran-chant de 10.8 N suivant
x
sur l'instrument de mesure (ITmaxl ~ 0.77 MPa). . . . . . . . . . . . . . . . . . . . 25 2.11 Visualisation des contraintes de cisaillement exercées par un efforttran-chant de 78 N suivant
z
sur l'instrument de mesure (ITmaxl ~ 3.9 MPa). 26 2.12 Visualisation des contraintes de Von Mises sur l'instrument de mesure(ITmaxl ~ 59.4 MPa). . . . . . . . . . . . . . . . . . . 26 2.13 Visualisation des contraintes de Von Mises sur l'ensemble aile-instrument
de mesure (ITmaxl ~ 87.6 MPa). . . . . '. . . 27 2.14 Spécifications techniques des jauges de déformation utilisées. . . . . . . 29 2.15 Différentes étapes de la pose et du câblage des jauges: a)Collage b)Pose
des connecteurs c)Câblage d)Mise en place du silicone d'étanchéité. 29
3.1 Chassis utilisé avec ses huits amplificateurs de jauges. . . 31 3.2 Montage utilisé pour l'étalonnage des deux efforts tranchants. 32 3.3 Vue des systèmes d'accroche de la balance hydrodynamique et des masses
respectivement. . . . . . . . . . 32 3.4 Détail des pièces nécessaires au montage d'étalonnage en torsion. . 35 3.5 Vue globale du montage d'étalonnage en torsion. . . . . . . . 36 3.6 Influence de la pollution croisée entre les efforts tranchants. . . . . 38
4.1 Vue globale du canal mis à disposition par le laboratoire de machines hydrauliques. . . . 39 4.2 A ubes directrices et nid d'abeille en entrée de canal. . . . . . . . . 40
Xll
4.3 Perte de charge oblique installée en sortie de canal. . . . 41 4.4 Schématisation du canal et de l'espace de mesure en mm. 43 4.5 Premier essai effectué à l'aide d'un tube de Pitot. . . . . 43 4.6 Graphique présentant les résultats de 10 essais au tube de Pitot et le
moyennage obtenu. . . . . . . . . . . .. 44 4.7 Graphique présentant trois essais par vélocimétrie laser et le moyennage
obtenu. . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 45 4.8 Graphique présentant les mesures moyennes obtenues par vélocimétrie
laser et au tube de Pitot. . . . . . . . . . . . .. 46 4.9 Mapping de vitesse en
mis
de la section d'essai obtenu à l aide de 28points de mesure. . . . . . . . . . . . . . . . . . . . .. 46 4.10 Mappings de l'écart-type en
mis
et du nombre de particules recencéeslors des essais. . . . . . . . . . . . . . . . . . . . 47 5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 6.1 6.2 6.3
Vue globale du bras assurant le pilonnement et du système de rails.
Vue des systèmes de courroies et des câbles assurant ·le mouvement de tangage. . . .' . . : . . : . . . . . . . . . . . . . Vue du carénage fabriqué en deux parties distinctes : corps et ailettes.
Vue de l'intérieur de la boîte de puissance. . . . . .
(a) Potentiomètre de tangage, (b) accéléromètre de pilonnement .. Courbe d'étalonnage du potentiomètre de tangage.
Chaîne de mesure.
Représentation des forces sur l'aile. . . .
Mise en place des fils afin de limiter les bris.
Embout, d'accouplement avec la balance hydrodynamique semblable à celui sur les ailes.. . . . . . . . . . . . . . . . . . . . . . . . Tourbillon en forme de fer à cheval aperçu par la vitre en plexiglas (image
50 . 51 52 53 53 54 56 57 64 65
extraite d'une vidéo d'un essai oscillant). . . . . . . .. 66 6.4 Courbes des coefficients de portance et de traînée obtenus sans
ajuste-ment de l'angle. . . . . . . . . . . . . . . . . . . . .. 67 6.5 Courbes des coefficients de portance et de traînée obtenus avec
ajuste-ment de l'angle. . . . . . . . .. 68 6.6 (a) Courbes des coefficients de portance et de traînée obtenus
numéri-quement et expérimentalement (b) Aperçu de la modélisation numérique du système. . . . . . . . . . . . .. 69 6.7 Courbes des positions et accélérations données par le potentiomètre et
6.8 Graphiques représentant les limites extraction d'énergie versus propul-sion ou
«
feathering limit» selon la valeur de Ho/ c. Le point de fonc-tionnement et les paramètres mentionnés correspondent aux essais avecXlli
des petites ailes. . . . . . . . . . . . . . . . . . 72 6.9 Courbes des coefficients de portance, traînée, moment et puissance
ob-tenues à partir des deux balances hydrodynamiques. . . . . . . . . 74 6.10 Courbes des coefficients de portance, traînée, moment et puissance
ob-tenues numériquement avec ou sans le signal donné par l'accéléromètre. - - signal de l'accéléromètre et - - fonction sinusoïdale. . . . . 76 6.11 Courbes des coefficients de portance, traînée, moment et puissance
nu-mériques et expérimentales pour un profil d'aile NACA 0015. . . . . . . 77 6.12 Influence d'un changement d'angle de -3 0 sur les coefficients de portance
traînée, moment et puissance. . . . . . . . . . . . . . . . . . . . . . . . 78 6.13 Influence des plaques de bouts d'ailes sur les coefficients de portance,
traînée, moment et puissance. . . . . . . . . . . 79 6.14 Coefficients de portance, traînée, moment et puissance obtenus avec les
grandes ailes. . . . 80 A.1 Mise en plande.l'.aile de 10 cms de corde. . 87 A.2 Mise en plan de l'aile de 15 cms de corde. . 88 A.3 Mise en plan des plaques de bouts d'ailes de 1 po pour une petite aile. . 89 A.4 Mise en plan des plaques de bouts d'ailes de 1 po pour une grande aile. 90 A.5 Mise en plan de la balance hydrodynamique. . . 91 A.6 Vue isométrique de l'ensemble balance, aile et plaques. 92 A.7 Vue globale du montage. . . . . . . . . 93 C.1 Tensions des trois ponts de j auges de chacune des balances; - essaI
Nomenclature
Note:
Certains symboles ont plusieurs usages et se retrouvent donc plus d'une fois dans le
tableau suivant. C'est le cas par exemple du symbole K qui est utilisé pour le facteur de jauge et pour les coefficients d'étalonnage, ou encore du sympole ~ pour désigner une déformation angulaire et la fréquence angulaire d oscillation. Ces doubles usages ne
portent cependant pas à confusion, car le contexte d'utilisation des symboles permettra
d'en faire une interprétation unique. De plus, les unités SI de chacun des symboles sont
indiquées dans la deuxième colonne du tableau. Les unités identifiées par [ ... ] indiquent
que le symbole en question aura des unités qui dépendent de la variable mesurée. Les unités identifiées par [1] indiquent qu'il s'agit d'un symbole sans dimension.
TAB. 1 - Liste des variables utilisant l'alphabet latin Notation Unités Définition
a [m] Largeur des fenêtres d'encastrement des jauges
As
[m2] SurfaceAy
[m/s2] Accélération verticale de l'aile oscillanteb [m] Largeur
c [m] Corde de l'aile
Cm
[1]
Coefficient de momentCp
[1]
Coefficient de puissanceCpe
[1]
Contribution du tangage au coefficient de puissanceCpy
[1]
Contribution du pilonnement au coefficient de puissanceC
x[1]
Coefficient de traînéeCy
[1]
Coefficient de portancee [m] Envergure de l'aile
E
[V]
Tensionf
[Hz]
Fréquence d'oscillation pour le pilonnement et le tangagef*
[1]
Fréquence adimensionnellefD
[Hz]
Fréquence DopplerF [N] Intensité d'une force, d'un effort
xv
Notation Unités Définition
h [m] Hauteur
h [m] Pilonnement, position verticale de l'aile oscillante
Ho [m] Amplitude de pilonnement z [m] Distance interfrange l [kg/m2] Moment d inertie J [kg/m2] Moment d'inertie de l'aile Ji
[1
]
J auges de contraintes K[1]
Facteur de jaugeK [000] Coefficients d'étalonnage
l [m] Épaisseur de paroi
l [m] Bras de levier des moments dus au poids et à la force de
flottaison
m [kg] Masse ·de l'ensemble 'aile et plaques de bouts d'ailes
M [Nom] Moment
p [m] Profondeur des encastrements
p [W] Puissance
Q [m3] Moment statique
R [0] Résistance électrique
Sy [Pa] Limite d'élasticité du matériau
t [s] Temps
T [N] Effort tranchant
T [s] Période du signal
Uoo , Ue
[mis
]
Vitesse de l'écoulementv
p[mis
]
Vi tesse de la particuleVe
,
Vs
[V] Tensions d'entrée et sortie d'un pont de WheastoneVy
[mis
]
Vitesse verticale de l'aile oscillanteW [N] Poids
TABo 2 - Liste des variables utilisant l'alphabet grec
Notation Unités Définition
a [rad] Angle d'attaque effectif
1
[1]
Déformation angulaire (appelée aussi glissement)1 [radis] Fréquence angulaire d'oscillation pourle pilonnement et
le tangage
E
[1]
Déformation unitaireNotation B B BQ p cp Autres notations Unités radis rad/s2 rad kg/m3 [rad] Unités
[
...]
[
...]
[
...]
[
...]
DéfinitionVitesse angulaire de l'aile oscillante Accélération angulaire de l'aile oscillante
Amplitude de tangage Masse volumique
XVI
Différence de phase entre le mouvement de tangage et celui de pilonnement
Définition
Variation ou incrément d'une quantité donnée
Valeur moyenne d'une quantité donnée
d( )
1
dt d2 ( )1
dt2Chapitre
1
.
Introduction
Une aile oscillante est, par définition, une aile soumise à un mouvemént répétitif au-tour d'un point fixe d'équilibre. Dans la réalité, ce mouvement peut tout aussi bien être une translation, une rotation ou encore un battement. Dépendamment de l'utilisation souhaitée de l'aile oscillante, plus ou moins d'études ont été faites.
Un exemple technologique évident se trouve être une pale de rotor d'hélicoptère. En effet, une pale d'hélicoptère s'assimile à une aile oscillante mue par le seul mouvement de tangage. La situation idéale pour un hélicoptère est d'obtenir une force de portance constante durant tout le cycle du rotor. Or, sauf dans le cas du vol stationnaire, des pales à angle fixe fourniraient une force de portance variant tout au long du cycle de rotation. En effet, dans le repère de la pale, à une position r, la vitesse vue par la pale varie de façon cyclique entre les valeurs wr+u et wr -u (u étant la vitesse de translation de l'hélicoptère et w la vitesse de rotation du rotor). Pour que la force de portance soit constante, il faut donc faire varier l'angle d'incidence des pales de manière cyclique. Il s'agit alors d'une aile en oscillation de tangage [4].
De même, la propulsion à ailes oscillantes telle que pratiquée dans la nature par les poissons, les oiseaux ou les insectes est déjà largement documentée. De nombreuses recherches font état de son efficacité [17, 18]. La FIG. 1.1 montre le mouvement combiné de tangage et de pilonnement produit par la queue d'un cétacé.
Quelques études s'attardent également sur le rôle bénéfique de la flexibilité de l'aile en terme de propulsion. Comme décrit par Heatcote et Gursul [6], la flexibilité de leur aile induit un tangage passif quand bien même le système n'est soumis qu'à un mouve-ment de pilonnemouve-ment. Il en ressort une similitude avec la propulsion par mouvements combinés.
Chapitre 1. Introduction 2
FIG. 1.1 - Mouvement de queue d'un cétacé.
1.1
Concept de base d'une turbine à ailes oscillantes
Le concept de turbine à ailes oscillantes consiste en un système d'une ou plusieurs ailes horizontales par exemple de profil symétrique simple. Ces ailes sont alors animées
d'un mouvement de translation dans la verticale nommé pilonne ment h(t) ainsi que d'un
mouvement de rotation nommé tangage
B(t)
afin de faire varier son angle d'attaque.Selon l'ajustement des mouvements de pilonne ment et de tangage, le système peut
fonctionner en mode extraction d'énergie comme turbine mais aussi en mode propulsion. L'intérêt principal de cette technologie réside dans la possibilité de pouvoir opérer en
régime instationnaire et ainsi profiter de forces aérodynamiques ou hydrodynamiques
supérieures.
Le cycle décrit par ce type d'aile oscillante se caractérise donc par la combinaison
des mouvements de pilonnement et de tangage. Physiquement, il en ressort des
pa-ramètres-clés tels la fréquence et l'amplitude d'oscillation ou encore le déphasage entre
les deux mouvements et dont l'influence est notable sur les performances et sur le mode
d'utilisation. Dans le cadre de cette étude, le cycle de l'aile souhaité est un
mouve-ment harmonique comme montré sur la FIG. 1.2. Dans la suite de ce travail, les termes « aile(s) oscillante(s)>> référeront toujours à ce type de mouvement. Il peut être décrit par les deux équations suivantes :
où
B
(t)
== B 0 sin (r
t
)
h
(t)
== Ho sin (rt
+
4J)
Bo amplitude de tangage
amplitude de pilonne ment fréquence angulaire
angle de déphasage entre les deux fonctions
(1.1) (1.2)
Chapitre 1. Introduction 3
h(t) ()(t)
u
00 BaFIG. 1.2 - Mouvement d'une aile oscillante de corde c avec un déphasage de 900
soumis
à un écoulement de vitesse U 00 (tiré de Kinsey et Dumas [9]).
1.2 Revue de littérature
Comme mentionné dans la section précédente, la physique des écoulements insta-tionnaires entre en jeu dans un système à ailes oscillantes comme celui à l'étude dans le cadre de ce mémoire. Pour des raisons de simplicité, les effets dus à l'instationnarité ont longtemps été occultés. Des impacts négatifs tels que le battement ou les vibrations subis par les ailes ont finalement mené à en prendre en compte afin de les réduire. Toute-fois, des effets bénéfiques sont également liés aux mouvements instationnaires puisque,
par exemple, le décrochage dynamique se révèle différent du décrochage statique et se fait ressentir à un angle plus élevé. Une phase apparaît et la valeur des coefficients de portance, de traînée ou de moment peut alors grandement excéder les valeurs statiques. Ces phénomènes sont décrits par plusieurs études [10, 14]. En outre les FIG. 1.3 et 1.4 donnent un aperçu de coefficients de portance instationnaires. Sur la FIG. 1.3 est illustrée l'évolution du coefficient avec une augmentation de la fréquence réduite i. e. que le système passe d'un mode quasi-stationnaire à un mode instationnaire. Il est alors vi-sible que le coefficient atteint des amplitudes de plus en plus grande avec l'augmentation de l'instationnarité. Quant à la FIG. 1.4, elle donne l'exemple d'un coefficient variant
entre
±
5 à comparer aux coefficients de portance statiques qui varient généralement aux alentours de 1.Chapitre 1. Introduction 0.6 0.4
'+-"
:::i 15 0.2 c ' , <1> 0 'u -.='8
-0.2 o -0.6"
- quasi-steady - k =.25 .. k =.5 '-'-'k = 1 - - -k = 2 \ \ \ \ \ " 2 3 4 5 6Time (scaled by frequency)
4
FIG. 1.3 - Courbes du coefficient de portance en fonction du temps et de la fréquence
réduite k pour une plaque soumise à un mouvement sinusoïdal de pilonnement tirées
des travaux de Brunton et al. [2].
ü 3 2.2 1.4 0.6 -0.2 ... , , , , , , . ':' , , ... : .. , . , , , . , , ... , . , . , . , , . ~ . , , . , , , , , .. ~' , , , , , . , , , , : ' , , , , , , , , , , : ' , , , , , , , " 5 .• . 1 .• .• .• . • " " " ' . " 1 "" "" " ':"" "" "'." ""'" '.:',."" .. " .:." ... , .. ':., ... ,. ,'.,., ... " ":'" ... " . 3 , . . . , " ... , ... : .... , . . , ... :.",.", .... : . .. Thn,J~t;." " " ... ,', .. , ... ,., .:, ... ,. , .... : . ... . , , . . , , , . . . .. . ... < . , . . . . , . • . , < . . . " ... ... . . " . . , . . ..:. , ... ...:.' , . , " l , , • • ~ , • , • • . ', . " ' " · , · , · , , , ü -1 ., ',' l'' Il • • •• : •••• •• Il I l •• : ••• l ' ' I l •• \ '. .. ; .. , .... " .. ; ... , .... ,; .. "... -3 , , ' Lift -1 ~----~----~----~---~----~----~----~----~-5
°
0.125 0.25 0.375 0.5 tIT 0.625 0.75 0.875 1FIG. 1.4 - Évolution des coefficients de portance et de poussée d'une aile NACA 0012 soumise à des mouvements combinés de pilonnement et de tangage d'après les travaux
de Pedro et al. [16].
1.2.1 Mode
propulsion
Même si l'utilisation d'ailes oscillantes comme moyen de propulsion n'entre pas dans le but de ce mémoire, il est intéressant d'analyser les travaux déjà effectués dans ce domaine. En effet, le montage expérimental et la mesure des forces est une partie commune aux deux modes de fonctionnement.
Travaux d'Anderson et al. [1] au Massachusetts Institute of Technology
(1998)
Chapitre 1. Introduction 5
système à une aile oscillante en mode propulsion. Ils utilisèrent une aile NACA 0012 de
corde 0.1 m et d'envergure 0.6 m, équipée de plaques de bout afin de minimiser les effets
de bout. Les mesures furent effectuées dans un canal hydrodynamique tel qu'illustré
sur la FIG. 1.5 avec principalement un déphasage de 90 0 entre les deux mouvements.
Deux moteurs fournissent les mouvements harmoniques de pilonnement et de tangage.
Ces mouvements sont transmis à l'aile à l'aide d'un mécanisme de poulies et de chaînes.
Quant aux forces et au moment de torsion, ils sont mesurés grâce à deux capteurs placés aux extrémités de l'aile. Enfin, un potentiomètre est utilisé pour évaluer la position en tangage et un transducteur de déplacement LVDT pour la position en pilonnement.
Capteur de couple
Capteur de forces
FIG. 1.5 - Appareillage utilisé par Anderson et al. [1] (schéma adapté).
Travaux de Hover et al. [7] au Massachusetts Institute of Technology (2004)
Le montage est assez similaire à celui de l'étude précédente puisque une aile NACA
0014 de corde 0.1 m et d'envergure 0.6 m est utilisée. Les mesures des forces et du moment sont réalisées à l'aide de capteurs piezoélectriques montés respectivement à
l'intérieur du roulement pour les forces de portance et de traînée et entre deux disques d'acier inoxydable sur l'arbre moteur pour le couple. De nouveau, un potentiomètre permet d'obtenir la position angulaire tandis que la position verticale est donnée par un encodeur.
Chapitre 1. Introduction Servomoteur de tangage Capteur de couple Capteur de forces à l'intérieur du roulement AiieNACA00147 Potentiomètre
FIG. 1.6 - Appareillage utilisé par Hover et al. [7] (schéma adapté).
1.2.2
Mode extraction d'énergie
Wingmill de McKinney et DeLaurier [15] (1981)
6
En 1981, McKinney et DeLaurier ont mené une première étude d'importance quant à l'efficacité du concept d'ailes oscillantes pour extraire de l'énergie. Leur prototype (voir FIG. 1.7) baptisé « wingmill » consistait en une aile de profil NACA 0012, ~e corde 0.2 m et d'envergure 1.05 m. Ce dernier était animé d'un mouvement combiné de pilonne ment et de tangage avec différents déphasages~ La puissance moyenne extraite maximale fut obtenue pour un angle de déphasage de 110 0 , mais l'efficacité maximale
fut obtenue pour une phase de 900
• Ceci s'explique par la façon de calculer l'
effica-cité énergétique qui est un rapport entre l'énergie extraite et l'énergie disponible. Les résultats de McKinney' et DeLaurier montrent d'ailleurs des efficacités maximales va-riant entre 18.4% et 28.3% selon les paramètres d'expérience utilisés et il semble que cette efficacité augmente avec l'angle de tangage et la vitesse de l'écoulement. De cette étude, ils réussirent donc à démontrer la faisabilité de même que le potentiel en terme d'efficacité énergétique de cette technologie comparativement aux éoliennes classiques de l'époque.
Le projet Stingray [19] (1997-2005)
Dès 1997, la compagnie The Engineering Business Ltd a amorcé des travaux visant à concevoir un hydrogénérateur destiné à exploiter l'énergie marémotrice. Après une étude de faisabilité, il fut décidé de construire un prototype de taille réelle développant 150 kW comme illustré en FIG. 1.8. Ce qernier fut opérationnel en 2002 et situé près
Chapitre 1. Introduction 7
FIG. 1.7 - Montage expérimental
«
Wingmill»
tiré des travaux de McKinney etDe-Laurier [15].
de l'île de Yell en Écosse. Suite aux différentes campagnes d'essais, The Engineering
FIG. 1.8 - Générateur Stingray [19].
Business Ltd (EB) conclut en une viabilité future d'une turbine marémotrice à ailes
oscillantes même d'un point de vue strictement commercial. Cependant, à cette phase du projet, de nombreux investissements sont encore nécéssaires au développement de ce générateur et EB ne peut présentement les obtenir.
Le projet Pulse Tidal [20] (2005-2008)
Depuis 2005, la compagnie
Pulse Generation Ltd
travaille sur
un
concept
d
'
Chapitre 1. Introduction 8
de 900
• Suite aux essais en canal hydrodynamique à l'université de Hull au Royaume-Uni qui ont permis d'obtenir une efficacité de près de 40%, la compagnie a reçu laide financière nécessaire au lancement d'un prototype de grande envergure. En avril 2008
le gouvernement britannique a accordé la permission d'installer le prototype dans la
rivière Humber en Angleterre.
FIG. 1.9 - Générateur Pulse Tidal [20].
Travaux de Jones et al. [8] au Naval Postgraduate School (2003)
Jones et al. ont investigué les performances d'une aile oscillante en extraction d'
éner-gie. Ils en conclurent qu'un déphasage proche de 90 0 était nécessaire et que la présence
de décrochage dynamique était profitable. Leurs tests furent faits à l'aide de deux ailes NACA 0014 de corde 0.0635 m (2.5 po) et de demi-envergure 0.17145 m (6.75 po) en
tandem (voir FIG. 1.10). La mesure du couple était faite à l'aide d'une cellule de charge
montée sur le frein de Prony et la vitesse angulaire était fournie par un encodeur. Tou-tefois, l'analyse de leurs résultats expérimentaux montra une disparité importante avec
leurs prédictions numériques. La FIG. 1.11 illustre le genre de résultats obtenus lors des
expérimentations et les compare à ceux du solveur numérique utilisé. Il est clairement
visible que le coefficient de puissance moyen est bien plus faible expérimentalement. Les raisons de cet écart sont nombreuses et diverses (effets tridimensionnels, inertie du
système, pertes mécaniques, ... ) et la manipulation expérimentale peut être considérée comme peu fiable puisqu'il faut aussi tenir compte de l'infiltration d'eau dans les ailes
en bois. Malgré les problèmes rencontrés, les auteurs conclurent tout de même que le
Chapitre 1. Introduction 9
-l'
'
-i;
FIG. 1.10 - Vue de dessus des deux ailes tandem tirée des travaux de Jones et al. (8].
=0 Q 0.8 0.6 UO- ONS, Re=2.0x104 • exp, Re=2.2x104 0.4 0.2 ~
~ffi
0 0.4 0.5 0.6 0.7 0.8 0.9 1.1 1.2 kFIG. 1.11 - Comparaison des résultats numériques et expérimentaux en traçant le co-efficient de puissance Cp en fonction de la fréquence réduite k = 2;~C tirée des travaux de Jones et al. [8].
1.3 Le projet d'hydrogénérateur en cours à
l'Uni-versité Laval
En 2006, un groupe de recherche multidisciplinaire fut créé à l'Université Laval afin de valider les nombreuses étapes menant à la réalisation d'un prototype d' hy-drogénérateur à ailes oscillantes de 1 kW fonctionnel en 2009. Cette équipe regroupe l'expertise de quatre laboratoires (électrotechnique, électronique de puissance et com-mande industrielle LEECPI, mécanique des fluides LMF', mécanique des fluides numé-riques LMFN, robotique) et du bureau du design ..
Chapitre 1. Introduction 10
et Dumas [9] afin d'investiguer l'efficacité en extraction d'énergie d'une aile oscillante.
Cette étude paramétrique d'envergure a permis de cibler les paramètres d influence et par la suite les conditions optimales d'utilisation. Le mapping en FIG. 1.12 permet
d'observer l'influence des différents paramètres sur l'efficacité d'une aile oscillante tandis
que la FIG. 1.13 illustre l'allure des coefficients de portance et de traînée obtenus.
80 70 60 50 40
1
17 (%) 30 30-35 20 10 0-5 o 0.00 0.05 0.10 f* 0.15 0.20 0.25FIG. 1.12 - Isocontours d'efficacité dans l'espace paramétrique de fréquence réduite f*
==
fc/Ue et d'amplitude de tangage Ba pour un profil d'aile NACA 0015 avec le pivotau tiers de corde (Re
==
1 100, Ho/c==
1) d'après lestravaux de Kinsey et Dumas[9].
2.0 1.0 1 / / c)(
'
.
\ \ \ 7 \ \'.
... ,-
----
\. /0/ //
>/
, .-0.0 ---t-:---Vi;
/
Uoo/
,!
\
... --- ' '-Cy -1.0(
Cx
>
0)
-2.0 0.0 0.2 0.4 0.6 0.8 t j T 1.0FIG. 1.13 - Coefficients de portance et de traînée typiques pour une aile oscillante en
Chapitre 1. Introduction Il Afin de corroborer ces prédictions numériques l'importance d'essais expérimentaux
s'est fait ressentir et c'est l'objectif de ce mémoire. Ils permettent d avoir une idée
plus précise de l'influence des effets tridimensionnels qui s'appliquent sur 1 efficacité du
système. Par la suite, toujours dans le but d'en arriver à un prototype de 1 kW le
laboratoire de mécanique des fluides numériques a testé différentes configurations afin d'optimiser un système à plusieurs oscillantes. Le prototype sera donc constitué de deux
ailes oscillantes montées en tandem (voir FrG. 1.14).
FIG. 1.14 - Prototype de table fabriqué à l'Université Laval.
Présentement, le groupe a identifié un site d'essai et s'active à la création du proto-type afin de mener une campagne d'essais pour valider le concept proposé.
1.4 Objectifs et structure
du
llléllloire
L'objectif général de la présente étude est de constituer une base de données ex-périmentale relative aux performances hydrodynamiques d'une aile oscillante évoluant
seule en mouvement combiné de tangage et de pilonnement.
Il s'agit d'une étude expérimentale destinée à appuyer les efforts de modélisation et
de simulation numériques investis par l'équipe du LMFN. Notamment cette étude et les
études subséquentes réalisées sur le même montage permettront d'obtenir des
informa-tions sur les effets tridimensionnels reliés aux effets de bouts ainsi qu'à la
rugosité ou
dispo-~ - - ~~~~~~~~~~
~~~~-Chapitre 1. Introduction 12
nibles à l'Université Laval, il a été déterminé que les essais devraient être réalisés dans
le canal hydrodynamique du Laboratoire de Machines Hydrauliques du département de
génie mécanique.
Les objectifs spécifiques de ce mémoire sont les suivants:
- Création d'une cellule de charge afin de mesurer les forces horizontales et verticales
ainsi que le moment de tangage sur l'aile.
- Optimisation de l'écoulement en canal hydrodynamique afin de le rendre le plus
uniforme possible.
- Programmation du système mécanique afin de reproduire le plus fidèlement
pos-sible les mouvements étudiés numériquement.
- Acquisition et traitement des données
Les objectifs de ce mémoire peuvent se décomposer en trois catégories distinctes. La
première catégorie correspond à la création de la balance hydrodynamique. Les chapitres
2 et 3 présentent le processus de développement de l'instrument puis son étalonnage.
La seconde catégorie concerne la préparation et la caractérisation d'un enviro.nnement
de mesure le plus adéquat possible. Ainsi le chapitre 4 met de l'avant les modifications
apportées au canal hydrodynamique ainsi que les mesures de vitesse subséquentes. Le
chapitre 5 traite du montage expérimental permettant d'obtenir le mouvement désiré
puis du système d'acquisition et de traitement des données. Enfin, vient ensuite au
chapitre 6 l'analyse des résultats' expérimentaux pour les diverses mesures effectuées
sur le montage. Ce mémoire se conclut au chapitre 7 avec quelques recommandations pour la suite des travaux.
Chapitre
2
Description générale de la balance
hydrodynamique
,
2.1 Elélllents sensibles jauges de déforlllation
2.1.1 Montage en pont
Soit un circuit constitué par quatre résistances égales RI, R2' R3, R4 montées en pont de Wheatstone (voir FIG. 2.1). Si le pont est alimenté par une source de tension
Ve
entre A et C, une tension nulle entre B et D est obtenue à l'équilibre. La variation de l'une des résistances fait apparaître une tension Vs entre B et D qui peut êtremesurée par un instrument. Pour de très faibles variations de résistance (de l'ordre de quelques microohms dans le cas des jauges de déformation), la tension de sortie Vs est pratiquement proportionnelle aux varIations relatives de résistance ~R/ R de chacune des jauges.
Négligeant les termes d'ordre supérieur, elle vaut:
(2.1 )
Or, une relation existe entre la variation unitaire de la résistance d'un fil conducteur et sa déformation axiale E. Cette relation est définie comme la sensibilité du matériau à
Chapitre 2. Description générale de la balance hydrodynamique du matériau utilisé.
~R
==
KE R 14(
2.2
)
En utilisant l Eq. (2.2), il est alors possible d'introduire les déformation dans l axe
principal de chaque jauge dans le système. Ce dernier devient ainsi:
(2.3) B v~ .~ RI R./2 ~~ (f-(9 A Vs C ./~ R3 R4 e. ~(9 ''f' vQO D
+
-VeFIG. 2.1 - Quatre jauges de contraintes en pont de Wheatstone complet.
Les signes alternés
+
et - de cette équation caractérisent la propriété fondamen-tale des ponts : deux résistances adjacentes agissent en sens inverse, alors que deux résistances opposées agissent dans le même sens. Un capteur est constitué par un tel pont dont une, deux, ou quatre des résistances sont des jauges électriques collées sur le corps d'épreuve, les autres étant des résistances fixes. Le cas utilisé pour concevoir la cellule de charge est celui de quatre jauges, soit un pont complet. Selon la règle des signes de l'Eq. (2.3), il faudra veiller à disposer les jauges de façon à éliminer les phénomènes parasites au profit de la grandeur recherchée.2.1.2 Disposition des jauges
Il existe plusieurs arrangements possibles des jauges dans le pont en vue de détecter une composante particulière de la déformation de la balance. Les défomations d'intérêt sont la torsion et le cisaillement dû aux efforts tranchants.
Chapitre 2. Description générale de la balance hydrodynamique 15
D'après l'Eq. (2.3), le signal sera maximal si les jauges sont judicieusement disposées
afin d' obtenir des ~R/ R les plus importants possible, les signes
+
et - s'additionnantalgébriquement. La FIG. 2.2 représente la. façon dont sont disposées les jauges sur la
balance hydrodynamique et les efforts s'y appliquant.
z
J-
y
x 6 4 2 10 12 !--- --- --- ----:
V
9" 11 /-
-
-
-
! -
-
-
-
-
-
-
-
-f t-- --- ---"ft --- -1 3 4.'iu 4/)° /~~~~'--- - - - - --- --- - - - --- - - --- --- - - --, 7FIG. 2.2 - Représentation en couleur du positionnement des jauges selon l'effort qu'elles
doivent mesurer.
Effort tranchant sur l'axe z :
t
Pour mesurer les efforts dont il est question, une cellule de charge formée d'un tube
de section carrée constitue la géométrie classique que l'on doit utiliser. Comme les jauges
sont collées à la surface de ce tube, l'état des déformations est mesuré dans un plan. Le
premier cas étudié est le cas de l'effort tranchant sur z.
Soit l'état connu dans le système (y, z), dans un autre système (u, v) orienté à 0 par
rapport au système (y, z), les déformations se calculent à l'aide des relations suivantes
tirées du cercle de Mohr :
Ey
+
Ez Ey - Ez (20)+
ryz . (20) Eu==
+
cos - SIn 2 2 2(2.4)
Ey+
Ez Ey - Ez (20) ryz . (20) E==
-
cos - - SIn v . 2 2 2(2.5)
Chapitre 2. Description générale de la balance hydrodynamique 16
Les déformations mesurées correspondent à un angle de 45 0 car c'est dans cette
direction que les déformations sont les plus grandes. Par ailleurs, les jauges sont centrées
par rapport à l'axe neutre
(Oy)
,
donc les déformations suivanty
~t z sont nulles. Parconséquent, les équations deviennent:
1yz Ev = -2 1uv = 0 (2.7) (2.8) (2.9)
Les directions (Ou) et (Ov) correspondent aux directions principales puisque l élé
-ment de matière ne subit aucune déformation de cisaillement dans le repère (0 , u, v).
Il est possible de visualiser cela en dessinant le cercle de Mohr des déformations.
Eu et Ev sont les déformations que subissent les jauges sur la face avant. Les jauges
mesurent donc des déformations de signe opposé. Aussi elle doivent être reliées dans
des branches adjacentes du pont de Wheatstone. Il en est de même pour les jauges de
la face arrière. Elles seront positionnées dans des branches adjacentes elles aussi. Le
montage est ainsi compensé en température.
Il reste toutefois à démontrer que le montage ci-dessous permet uniquement de
mesurer l'effort tranchant sur z.
La configuration réelle correspond au cas où 3 efforts sont appliqués, les deux efforts
tranchant en x et en z et le moment de torsion autour de y : « cas des efforts combinés ».
Le TAB. 2.1 rend compte de l'insensibilité à l'effort sur x et le moment sur y.
De plus, la disposition en croix de Saint-André des jauges est d'autant plus
inté-ressante qu'elle rend les jauges insensibles aux moments de flexion (sur x et z). C'est
pourquoi à aucun moment la position des jauges le long de la poutre (axe y) n'intervient.
C'est aussi pour cette raison que la modélisation des forces est faite à l'extrémité de la
poutre et non, comme c'est le cas dans l'expérimentation, sur la surface de l'aile (qui
sera dans le prolongement de la poutre).
Pour finir, les efforts de tension-compression n'engendrent aucune différence de
po-tentiel ~ V, car clairement toutes le~ jauges subissent la même déformation.
Ce montage en pont permet donc uniquement d'accéder à l'effort tranchant ~, sans
Chapitre 2. Description générale de la balance ~ydrodynamique
A
TAB. 2.1 - Réponses du pont de jauges 1 à 4 aux trois efforts.
Effort sur z D + -C A Effort sur x B D + -C A Effort sur y D +
-~VS == K~e
[-4E]
~Vs == K~e[OE]
== 0 ~VS == KY:[OE]
== 0Effort tranchant sur l'axe x :
te
C
Les résultats trouvés pour l'effort sur z peuvent être transposés à l'effort sur x. 17
Le pont de jauges 5, 6, 7 et 8 est capable de mesurer la différence de potentiel causée
par la déformation due à l'effort tranchant sur x. Il est insensible aux autres efforts (cf
TAB. 2.2).
A
TAB. 2.2 - Réponses du pont de Jauges 5 à 8 aux trois efforts.
Effort sur z D + -C A Effort sur x D + -C A Effort sur y D +
-~VS == KY:
[OE]
== 0 ~Vs==
K~e[-4E]
~Vs == KY:[OE]
== 0Chapitre 2. Description générale de la balance hydrodynamique 18
Moment suivant l'axe y :
Mt
yUne poutre soumise à un couple
Mt
y de torsion ,pure subit ses déformationsmaxi-males suivant les directions situées à
±
45 0 de la direction des génératrices. Cesdé-formations sont égales et de signe contraire. Les deux jauges 9 et Il placées sur la
même génératrice et collées perpendiculairement l'une à l'autre à
±
45 0 de l'axedon-neront une information liée au couple de torsion. Ce montage est cependant sensible à
certaines flexions. Par contre, en complétant le pont par les deux jauges 10 et 12 sur
la génératrice opposée, le montage devient sensible à la seule torsion à l exclusion des
tractions-compressions ou flexions (cf TAB. 2.3). De plus ce montage est directement
compensé en température.
A
TAB. 2.3 - Réponses du pont de jauges 9 à 12 aux trois efforts.
Effort sur z B D + -C A Effort sur x D + -C A Effort sur y B D +
-~VS
==
K~e[OE] ==
0 ~Vs==
KY:-[OE] ==
0 ~Vs==
K~e[4E]
Récapitulatif
C
À ce stade, il est possible de mesurer les différences de potentiels qui sont images
des déformations dues aux deux efforts tranchants et au couple de torsion. Reste ainsi à relier les déformations mesurées avec les valeurs des forces de portance, de traînée et
Chapitre 2. Description générale de la balance hydrodynamique 19
2.2
Modélisation théorique de la poutrelle
instru-mentée
2.2.1
Données de départ
- Problématique : Il faut optimiser le design de la poutre pour avoir des tensions considérées comme « acceptables» en sortie du pont de Wheatstone c'est-à-dire comprises entre -5 et +5 volts.
- Hypothèse : Les calculs se basent sur la théorie des poutres à parois minces.
- Cahier des charges : La poutre doit supporter les efforts hydrodynamiques, se
loger entre le moyeu et l'aile être facilement démontable et bien sûr perturber le
moins possible l'écoulement.
En entrant les paramètres géométriques de la poutre, les contraintes de cisaillement au niveau des jauges puis les tensions en sortie de pont sont alors calculées.
2.2.2
Modèle théorique
Efforts tranchants suivant les axes x et z
Dans les sections à paroi mince, le cisaillement (ainsi que le flux de cisaillement)
doit être parallèle aux bords de la section, et donc, en pratique, à la tangente à la ligne
moyenne. Aussi le cisaillement est pratiquement constant en travers de l'épaisseur de
la paroi et· peu différent de sa valeur moyenne T.
Le cisaillement moyen sur la paroi est donné par :
où T Q f l
TQ
Ttranchant==
2fl (2.10) effort tranchantmoment statique de As (aire de la section) suivant les axes x et z
moment d'inertie
épaisseur de la paroi considérée
Moment suivant l'axe y
r-Chapitre 2. Description générale de la balance hydrodynamique male à la ligne moyenne.
La torsion exercée sur la paroi est donnée par :
Mt y Ttorsion == 2lD
20
(2.11 )
aire circonscrite par le contour moyen (à mi-épaisseur de la paroi)
épaisseur de la paroi sur l'axe horizontal
Développement des variables d'intérêt
Il est évident que dans chacun des cas, T est inversement proportionnel à la lon-gueur l. Cela montre qu'il y a intérêt à amincir la poutre afin d'encastrer les jauges d'extensométrie. La FIG. 2.3 permet de situer les variables introduites lors des calculs.
Cas
fx : {
~x
Ix (2.12) b-bl - 2 - - Pz Cast:
h2 h 2 a - a2 b- -8 -b1::l -8 P -x2 (h - p ) - p -x z4 (2.13)- {D
Cas Mt y : lt (2.14)Design théorique de la balance hydrodynamique
Afin de se faciliter la tâche dans le dimensionnement de la poutrelle instrumentée, une feuille de calcul Excel a été conçue. Elle permet de faire varier les différents pa-ramètres et de voir immédiatement leur influence quant aux calculs des efforts. La
FIG. 2.4 récapitule les choix effectués quant à la section de la poutre et à la profondeur
-Chapitre 2. Description générale de la balance hydrodynamique 21
FIG. 2.3 - Sections de la poutre au niveau des encastrements.
TAB. 2.4 - Tableau de dimensionnement de la poutrelle.
l (en mm) T (en MPa) ~Vs (en V) Effort tranchant Tx 0.5 0.906 0.280 Effort tranchant Tz 1 3.423 1.057 Couple de torsion
Mt
y 1.5 12.158 3.755des encastrements. Pour obtenir ces dimensions, les efforts maximaux s'appliquant à
la structure sont considérés et utilisés séparément dans le cadre de cette approche
théorique. Ils ont été calculés à l'aide des simulations numériques sur un profil d'aile
NACA 0015 de corde 150 mm faites au LMFN. Dans le cadre de ce projet, les deux paires d'ailes disponibles seront de 100 et 150 mm de corde. Aussi, les grandes ailes
correspondent au cas le plus critique car le profil ayant la plus grande corde génèrera
les plus grandes forces.
Les résultats obtenus grâce aux équations précédentes sont affichés dans le TAB. 2.4. L'intervalle de 0-5V est donc bien respecté.
2.3
Simulation numérique
2.3.1
Vérification de l'hypothèse poutre
Afin de vérifier l'hypothèse principale selon laquelle la balance hydrodynamique se
comporte comme une poutre, une comparaison entre les résultats calculés et ceux
obte-nus sous le logiciel NX3 est nécessaire. Aussi, les trois efforts ont été simulés séparément
Chapitre 2. Description générale de la balance hydrodynamique
4·978
Pff
64.4
.
~
A-A
FIG. 2.4 - Dimensions de la balance hydrodynamique.
22
2 0.5
B-B
Les FIG. 2.5, 2.6 et 2.7 sont des représentations des contraintes de cisaillement pour
chacun des amincissements. Elles permettent de corroborer les résultats précédents puisque les résultats donnés par le logiciel NX3 sont du même ordre de grandeur que ceux calculés de façon théorique. Toutefois, il subsiste un écart non négligeable de l'ordre de 20% dans le cas de l'effort tranchant
t.
Quelle peut en être la raison?MPa
1
13.27 10.86 8.44 6.03 3.62 1.21 -1.21 -3,62 -6.03 -8.44 -10..86 -13.27FIG. 2.5 - Visualisation des contraintes de cisaillement exercées par un couple de torsion
de 6000 N.mm suivant
y
sur une poutre de 150 mm dont l'amincissement a pour valeurChapitre 2. Description générale de la balance hydrodynamique 23 MPa
1
-0.800 -0.824 -0.848 -0.872 -0.896 -0.920 -0.944 -0.968 -0.992 -1.0161
-1.040 -1.064FIG. 2.6 - Visualisation des contraintes de cisaillement exercées par un effort tranchant
de 10.8 N suivant
x
sur une poutre de 150 mm dont les amincissements ont pour valeurs lx et lz égales à 0.5 et 1 mm respectivement (ITmaxl ~ 0.89 MPa).MPa
1
-3.500 -3.620 -3.741 -3.861 -3.9821
-4.102 -4.222 -4.3431
-
-4.463 -4;5831
-4.704 -4.824 ~cFIG. 2.7 - Visualisation des contraintes de cisaillement exercées par un effort tranchant
de 78 N suivant
z
sur une poutre de 150 mm dont les amincissements ont pour valeurs lx et lz égales à 0.5 et 1 mm respectivement (ITmaxl ~ 4.18 MPa).Une poutre parfaitement symétrique, c'est-à-dire creusée de la même manière pour
les deux efforts tranchants, a ensuite été modélisée (cf. FIG. 2.8). Comme l'amincisse-ment lx est le plus sensible, il faut calculer l'effort tranchant
t
avec un amincissementChapitre 2. Description générale de la balance hydrodynamique 24
théoriquement (6.62 MPa versus 6.61 MPa). Aussi il est plausible de penser que les
calculs théoriques sont trop réducteurs car ils ne prennent pas en compte de possibles
effets tridimensionnels tels l'influence de lx sur le calcul de
fz.
MPa -5.000 -5.244 -5.488 -5.732 -5.976 -6.219 -6.463 -6.707 -6.951 -7.195 -7.439 ~'--7.683FIG. 2.8 - Visualisation des contraintes de cisaillement exercées par un effort tranchant de 78 N suivant
z
sur une poutre de 150 mm dont les amincissements sont les mêmeset égaux à lx (ITmaxl ~ 6.62 MPa).
2.3.2
Simulation sur l'instrument de mesure
Cas des forces séparées
Les trois cas ci-présents illustrés sur les FIG. 2.9, 2.10 et 2.11 donnent des résultats
très cohérents avec les hypothèses posées au départ. L'hypothèse poutre est donc vérifiée
dans le cas de l'instrument de mesure. Comme dans le cas de la poutre de 150 mm,
il aurait été judicieux de calculer le gauchissement que subit l'instrument. Ce dernier permet en effet de justifier la légère différence existant entre la théorie ,et la simulation.
Cas des forces combinées
Afin de savoir si l'instrument de mesure ne cassera pas, le critère de Von Mises qui est un critère de majoration des contraintes maximales est utilisé. En outre, il est courant de prévoir un facteur de sécurité correspondant
à
'max<
0.3Sy,
'maxcorrespond à
la
Chapitre 2. Description générale de la balance hydrodynamique 25 MPa
1
13.00 12.73 12.45 12.18 11.91 11.64 11.36 11.09 10.82 10.55 10.27 10.00FIG. 2.9 - Visualisation des contraintes de cisaillement exercées par un couple de torsion
de 6000 N.mm suivant
il
sur l'instrument de mesure (ITmaxl ~ Il.8 MPa).MPa
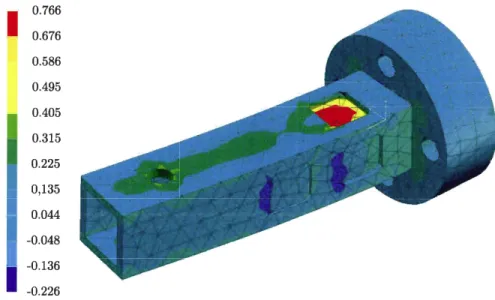
1
0.766 0.676 0.586 0.495 0.405 0.315 0.225 0,135 0.044 -0.048 -0.136 -0.226FIG. 2.10 - Visualisation des contraintes de cisaillement exercées par un effort tranchant
de 10.8 N suivant
x
sur l'instrument de mesure (ITmaxl ~ 0.77 MPa).contrainte maximale tandis que Sy est la limite de rupture du matériau considéré. Dans
le cas de l'aluminium, Sy vaut ainsi 276 MPa et 0.3 Sy est égal 83 MPa.
La simulation sous NX3 (voir FIG. 2.12) valide les dimensions de l'instrument puisque les contraintes maximales ne dépassent pas le seuil limite fixé, soit T max
==
59.4 MPa<
83 MPa.Chapitre 2. Description générale de la balance hydrodynamique 26 MPa
1
3.877 3.314 2.752 2.190 1.628 1.066 0.504 -0.059 -0.621 -1.183 -1.745 -2.307FIG. 2.11 - Visualisation des contraintes de cisaillement exercées par un effort tranchant
de 78 N suivant
z
sur l'instrument de mesure (ITmaxl ~ 3.9 MPa).MPa
1
59.36 53.97 48.57 43.17 37.78 32.38 26.98 21.59 16.19 10.79 5.38 0.00FIG. 2.12 - Visualisation des contraintes de Von Mises sur l'instrument de mesure
(ITmaxl ~ 59.4 MPa).
2.3.3
Simulation Aile - Instrument de mesure
Il est également important de simuler l'instrument de mesure accouplé avec l'aile
car cette dernière a une influence sur les contraintes subies par l'instrument. Les efforts tranchants sont alors appliqués sur la face supérieure de l'aile tandis que le couple de
Chapitre 2. Description générale de la balance hydrodynamique 27 torsion s'applique en un point situé sur l'axe de la poutre. En outre, le calcul de la flèche et une étude modale permettent de mieux caractériser le comportement mécanique de
l'ensemble.
Vérification des contraintes de Von Mises
Comme précédemment, le critère de Von Mises est choisi afin d évaluer la résistance
de la structure soumise aux efforts maxima. En effet, l'intégration de 1 aile engendre
un moment de flexion importarit qu'il a fallu prendre en compte pour dimensionner
l'instrument, bien que les jauges y soient insensibles. La valeur obtenue en FIG. 2.13 soit 87.6 MPa dépasse légèrement 0.3 Sy
==
83 MPa mais reste du même ordre degrandeur. Le dimensionne ment s'avère donc adéquat.
MPa
1
87.54 79.59 71.63 63.67 55.71 47.75 39.79 31.83 23.88 15.92 7.96 0.00FIG. 2.13 - Visualisation des contraintes de Von Mises sur l'ensemble aile-instrument de mesure
(/T
max / ~ 87,.6 MPa).Obtention de la flèche
Il est intéressant de connaître la flèche maximale de l'ensemble « aile
+
poutrelle »afin d'en estimer sa rigidité. La simulation sous NX3 donne ainsi une flèche maximale de 1.7 mm en bout d'aile. Cette flèche correspond en fait à 7.6% de l'épaisseur maximale de l'aile. En outre, cette flèche ne s'observe que pendant une infime portion du cycle. Il
est donc possible d'affirmer que l'ensemble ne se déforme pas de façon exagérée et que la flèche n'aura pas d'impacts majeurs sur la mesure des forces hydrodynamiques.
Chapitre 2. Description générale de la balance hydrodynamique 28
Étude modale
Afin d'obtenir les fréquences naturelles de la structure, une étude modale sous NX3 est nécessaire. Cette étude permet de vérifier que la fréquence d'oscillation prévue (1 Hz) n'entraîne pas une entrée dans un mode de résonance qui serait dommageable pour l'instrument. D'après la simulation, le premier mode de résonance se situe vers 34 Hz.
Les mesures de force au sein du canal ne sont donc pas perturbées par ce phénomène.
2.4
Fabrication
2.4.1
Usinage de la balance hydrodynamique
La fabrication de la balance hydrodynamique est une étape primordiale du
proces-sus car un manque de précision quelconque peut fausser très largement les mesures.
C'est ainsi que, rapidement, un ajustement a été apporté au design initial. En effet,
la profondeur de l'encastrement usiné pour l'effort
ic
s'est avérée trop critique eten-traînait des imprécisions inacceptables sur les mesures. Cela est dû à l'importance de
lx dans le calcul de l'effort tranchant. lx représente l'épaisseur restante au niveau de l'encastrement des jauges constituant le pont 5-8. Or, cette épaisseur n'était que de
0.5 mm et un défaut de l'ordre de seulement 0.1 mm signifie donc une variation de
20% de l'épaisseur. Il a donc été décidé d'utiliser la même profondeur d'encastrement
i. e. lz
==
lx==
1 mm pour les deux efforts tranchants puisqu'aucun problème n'étaità signaler avec
t.
L'usinage a été réalisé à l'atelier de fabrication du département degénie mécanique.
2.4.2
Pose des jauges et câblage
Les déformations induites sur la balance hydrodynamique sont mesurées à l'aide de jauges de déformation CEA-13-062WT-350 de la compagnie Vishay. Ces jauges présentent un avantage conséquent puisqu'elles sont directement vendues en étant
mon-tées par paire à 90 0 ce qui facilite la pose. L'arrangement des jauges est décrit sur la
configuration technique fournie par Vishay disponible en FIG. 2.14. La pose des jauges
ainsi que le cablâge (voir FIG. 2.15) ont d'ailleurs été assurés à l'atelier d'électronique
2. Description générale de la balance hydrodynamique
\..
GA-GE PATTE-RN ActuaJ slzesho n.
Enlarged when nece sary for d 1inition DESIGGANATION GE RETolerance is S. IN OHMS ES :::; E ch section Cp:::; Compl
S = Section 81= Sec 1) M = Matri
Insert desired S-T-C Increased hen umber in spaces . Option W. E, SE. LE.
marked XX. or Pis specified.
OPTIONS AVAILABLE
062WT l 'Co FEATURE 1 Small t o-elemant 90° stacked rosette. Exposed solder tab area 0.07 x
llX 2X GAGE OVERALL GRID LENGTH LENGTH WIDTH 0.062 ES 0.235 CP 0.120 ES 1.57 ES 5.97 CP a05ES MATR1X SIZE 0.33L x ·O.33W OVERALL WIDTH 0.235 CP 5.97 CP S.3l x 8.3W
0.04 in (1.8 .0 mm). Ma Imum opera ing te perature + 150°F
(+65 C).
CEA-XX-062Wr-120
CEA-XX-062WT-350 350 120 ± ± 0 0. .5.5% %
CEA- eries Strain G ges
featur larg copp· r solder tabs and a completely
encap ul led grid.
FIG. 2.14 - Spécifications techniques des jauges de déformation utilisées.
a b c d
29
FJG. 2.15 - Différentes étapes de la pose et du câblage des jauges: a)Collage b )Pose des connecteurs c)Câblage d)Mise en place du silicone d'étanchéité.

![FIG. 1.2 - Mouvement d'une aile oscillante de corde c avec un déphasage de 90 0 soumis à un écoulement de vitesse U 00 (tiré de Kinsey et Dumas [9])](https://thumb-eu.123doks.com/thumbv2/123doknet/3632506.106883/19.918.325.664.110.395/mouvement-oscillante-déphasage-soumis-écoulement-vitesse-kinsey-dumas.webp)