Image moments-based ultrasound visual servoing
Texte intégral
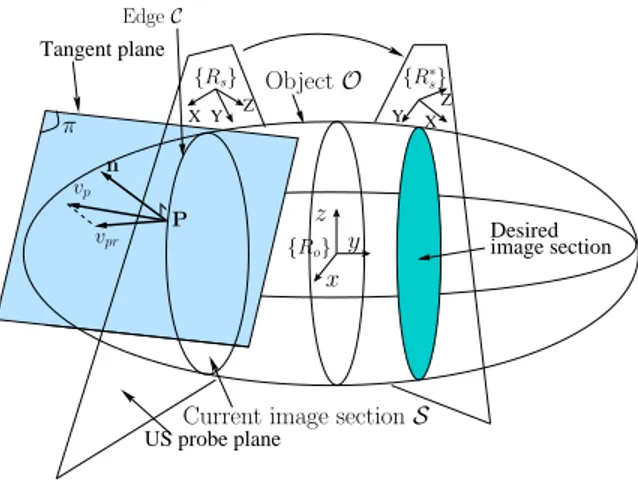
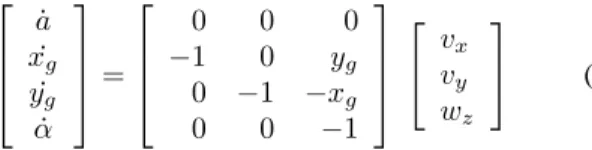
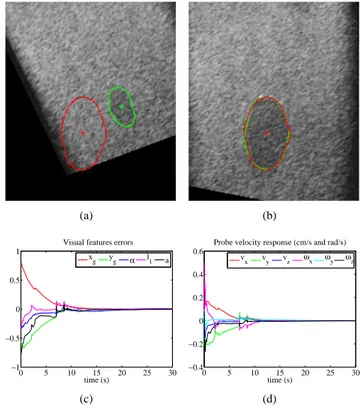
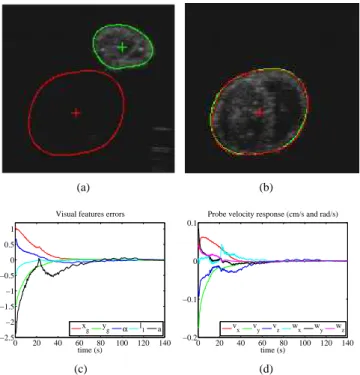
Figure

Documents relatifs
C’est le nombre de communes qui considèrent les sentiers, circuits sportifs et randonnées comme un motif d’attraction touristique sur leur territoire ramené au nombre total
l’Égypte ancienne a progressivement vu ses spécialistes se replier sur eux-mêmes, prétextant un terrain d’études particulier aux problématiques et méthodes
Figure 10: Comparaison entre les modules des déplacements mesurés pour le repère topographique TP11 et ceux des déplacements calculés avec les modèles de Burger avec failles
- Action liée à la validation : Convaincu de l’importance de distinguer une implication de sa réciproque en soulignant que les futurs étudiants ont intérêt à
Il semblerait alors que l’un des rôles physiologiques de la protéase NS3/4A dans des cellules infectées soit de prévenir l’induction d’une réponse inflammatoire déclenchée
:صخلملا ىلع نيعتي ، ةيييميلعتلا تاييسسؤملا يف بيوييلا تاييقيبطتل ريييبكلا و رمتسملا ديازتلل ا ًرظن .(مدختسم باسح هيدل) هيلا لوصولا قح هيدل
found recently in the iConnect study that a 1-year decrease in cycling for commuting (not for walking) was associated with a decrease in LTPA [19]. A limitation in previous
[19] de Flores R, La Joie R, Landeau B, Perrotin A, M´ezenge F, de La Sayette V, Eustache F, Desgranges B, Ch´etelat G (2015) Effects of age and Alzheimer’s disease on
