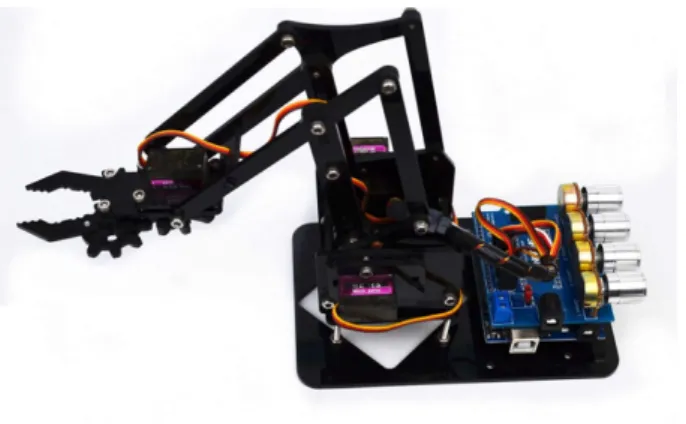
Implémentation De La Commande Intelligente Dans Un Robot à Deux Degrés De Liberté
Texte intégral
Figure





Documents relatifs
Une rotation suivant l’axe vertical et une autre suivant l’axe horizontal, sont assurées par un Moteur à Reluctance Variable (MRV), commandé par la technique de ‘contrôle
En bref, le calibrage consiste à identier les paramètres du modèle mathématique d'un robot pour réduire ses erreurs de précision.. An d'identier ces paramètres, il est nécessaires
Le fait que le système soit découplé, et a deux moteur (un pour chaque articulation) et surtout grâce a [21] nous pouvons dire que notre système est commandable.. Figure 3.3 Schéma
Pour les sommes de type II, on doit faire la diff´erence entre la somme des carr´es relative aux erreurs dans le mod`ele avec les seuls effets de F 2 et la mˆeme somme dans le
Il s’agit d’utiliser des outils chirurgicaux de tr`es petite taille, plac´es `a l’extr´emit´e de tiges tubulaires tenues par le chirurgien ; la partie inf´erieure des tiges
En r ´ealit ´e le m ´ecanisme est plus complexe, c’est une r ´eaction d’autocatalyse dans laquelle interviennent plusieurs r ´eactions avec des vitesses de diff ´erents ordres
l’algorithme somme-produit permet de faire l’inf´ erence sur les arbres l’algorithme max-somme pour le d´ ecodage. l’algorithme EM pour faire de l’estimation dans les mod` eles
4 Lors de l’entr´ ee en classe, vous vous installez dans le calme ` a votre place, vous sortez les divers travaux en cours de traitement et vous attendez que la s´ eance commence.
![Commen¸cons par quelques notations. Le symbole d´ esignera ]0, 1[](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)