KL22
e3a
concours
~
CONCOURS ENSAM - ESTP - ECRIN - ARCHIMEDE
Epreuve de Sciences Industrielles MP durée 3 heures
La Figure 5 & 6 et la Figure 7 sont des documents réponse, de même que les deux feuilles de papier millimétré qui sont à votre disposition.
Pensez à les numéroter et à remplir leur entête.
0 0 ::::s (') 0 c
;
rn
w )>s::
,
....
=
Robot nettoyeur de piscine publique "AXIOM"
Contenu du dossier
Texte de l'épreuve : pages 1 à 7 Document 1 : Nomenclature
Document 2 : Organigramme technique Figure 1 : Robot Axiom
Figure 2 : Unité de nettoyage Figure 3 : Unité d'entraînement Figure 4 : Architecture globale
Figure 5 & 6 : Robot en phase de descente et robot sur le fond Figure 7 : Début de montée
page 1
Rxiom
0 0
g
c
(jJm
>
3::
"'0~
PRESENTATION
L'étude proposée concerne un robot nettoyeur de piscine publique, dont une photographie est fournie figure 1. Ce robot est conçu pour s'adapter
à
tout type de bassin, et peut nettoyer aussi bien les parois que le fond. Dans le cas de revêtement de paroi très glissant (carrelage), il peut être nécessaire de remplacer les brosses d'origine par des brosses en mousse spéciale car les brosses de nettoyage (figures 1 et 2) assurent aussi le déplacement du robot. Elles sont pourvues d'ailettes radiales souples revêtues de matière antidérapante, et sont montées sur 4 rouleaux identiques (figure 2).Chacun des rouleaux-brosses est entraîné en rotation par un pignon de sortie 43 (figure 3).
Ces rouleaux entraînent également deux chenilles latérales (figure 4), servant
à
déplacer le robot lorsqu'une configuration de basculement (non envisagée dans cette étude) empêche les brosses d'agir efficacement.Une série de flotteurs montés sur un bras articulé (figures 1 et 2) permettent d'équilibrer le robot et d'adapter précisément sa masse en fonction du revêtement intérieur de la piscine.
Une pompe (figures 2 et 4) aspire l'eau entre les quatre rouleaux et la refoule, après filtration, selon l'axe central du robot. Ces deux phénomènes d'aspiration (dépression sous le robot) et de refoulement en partie supérieure du robot (effet de réaction) tendent
à
plaquer le robot sur la surfaceà
nettoyer.Le robot est alimenté en énergie électrique et lié à l'armoire de commande par un câble qui ne gène pas son fonctionnement.
Ce robot offre trois modes de fonctionnement : automatique, manuel et programmé (pour nettoyage nocturne). Son mode de déplacement est non ordonné-: en mode automatique ou programmé, le robot change de direction
à
intervalles de temps réguliers afin de parcourir l'intégralité du bassin.Deux types de parcours sont possibles : " SOL " uniquement ou " SOL + PAROIS"· Dès sa mise en service en mode automatique ou programmé, le robot se déplace jusqu'à la rencontre d'une paroi. Au contact de celle-ci l'appareil se dresse, et signale à l'armoire de commande sa position inclinée. Celle-ci inverse le sens de déplacement du robot si le programme " SOL " est sélectionné, sinon il gravit la paroi. Le temps d'une montée de paroi est défini par une temporisation programmable. Cette faculté permet le nettoyage des fosses de plongée d'une manière automatique, sans intervention humaine. Données techniques :
Robot : Masse : M
=
40 kg, Volume de matière : V0=
38 dm3
pas de volume d'air en vase clos Brosse : 0int·
=
115 mm, 0ext=
155 mmDistance axe brosse/sol (pompe active) Rb= 67,5 mm Moto-réducteur: Moteur: Alimentation de base: 24 V continu
Vitesse nominale : 2500 trs/min, Puissance : 50 W Vitesse de fonctionnement : Nm
=
1815 trs/min Rendement : JL m=
0,69Réducteur: Rapport de réduction: r= 1/22,7 Rendement: Jlr= 0,91
Transmission moto-réducteur- rouleau : Rendement : J.1 r
=
0,83page2
TRAVAIL DEMANDE
1 Etude fonctionnelle du robot
On propose ici de comprendre la logique de conception du robot. Un produit industriel peut se décomposer en blocs fonctionnels. On définit ainsi des fonctionnalités internes pertinentes de la conception du système ·et on identifie des ensembles standards. La juxtaposition de ces blocs permet de réaliser l'~rganigramme technique comme défini sur le document 2. 1.1_ Exprimer la fonction globale du robot.
1.2_ Associer les éléments principaux de la nomenclature
à
leur bloc fonctionnel de niveau 2.1.3_ Exprimer, pour chaque bloc fonctionnel de niveau 2, la ou les fonctions qu'il remplit (fonctions machines).
2_ Etude_ du temps de plongée.
L'objectif est ici d'évaluer le temps qui s'écoule entre la mise à l'eau du robot et son contact avec le fond.
Pendant sa descente, supposée être une plongée verticale libre, il subit, de la part de l'eau une résistance à l'avancement appelée traînée·. Dans ce cas précis, on peut, en première approximation, considérer que la traînée est proportionnelle à la vitesse du robot. Le coefficient de proportionnalité est évalué, soit Ct= 80 N.s/m.
Le robot présente un axe central de symétrie.
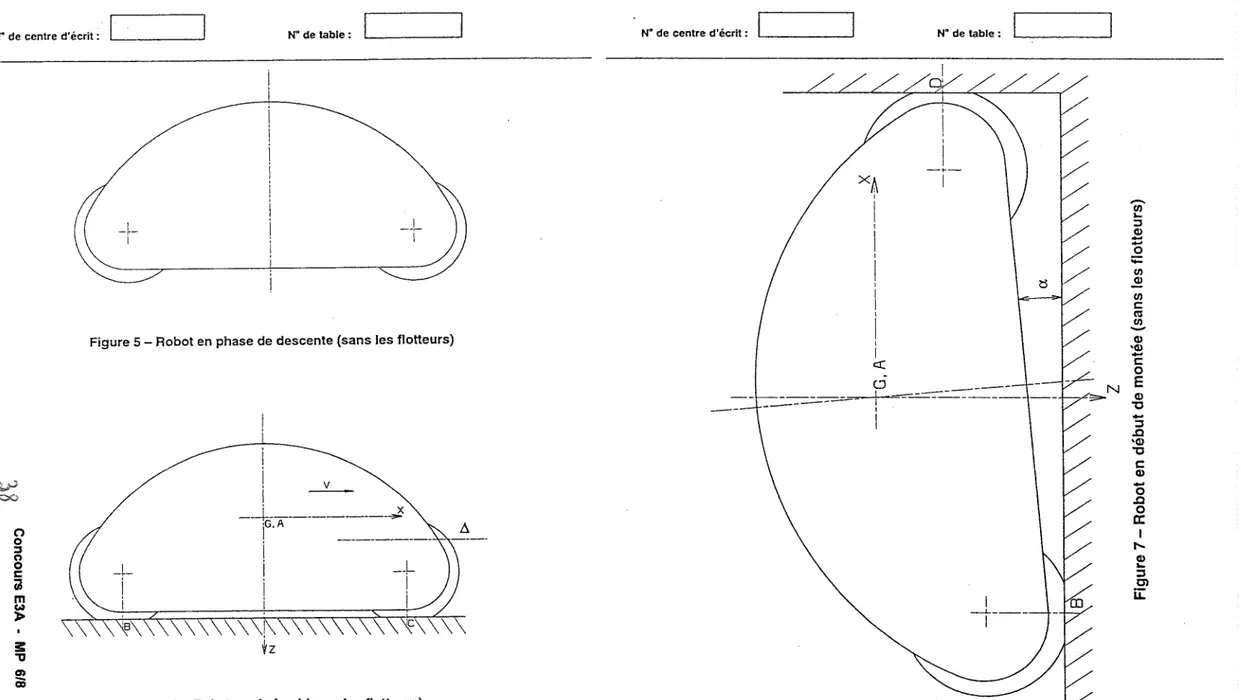
Nota : Cette traînée est proportionnelle à la pression dynamique due au déplacement, le coefficient de proportionnalité (fonction de la vitesse) dépend de l'écoulement autour du robot. 2.1_ Définir les différentes actions agissant sur le robot pendant la descente et mettre en place leur modèle vectoriel sur le schéma de la figure 5.
2.2_ Exprimer l'accélération du robot lors de la descente. En déduire l'expression littérale liant la cote Z atteinte au temps écoulé. On prendra l'origine des cotes
à
la surface de l'eau et le sens positif vers le bas.2.3_ Evaluer Je temps mis par le robot pour atteindre, à partir de son lâcher en surface, le fond situé
à
la cote Z = 2 m. Préciser la méthode utilisée pour arriverà
ce résultat2.4_ Ce résultat peut évoluer en fonction de modifications ou précisions dans les hypothèses de l'étude, visant
à
mieux approcher la réalité. Présenter ces modifications ou précisions et dire dans quel sens elles peuvent influencer le rêsultat précédent. Discuter notamment de l'influence de la position du centre de poussée A sur l'axe central du robot.0 0 j
g
c
ùl
m
~
3: "'0 (,)a;
3_ Etude du déplacement horizontal.
Il s'agit ici de comprendre le fonctionnement horizontal du robot. Hypothèses :
-Centre de poussée A confondu avec le centre de gravité G.
- Résultante des actions de l'eau sur le robot, dues à son avancement, réduite à la traînée, c'est à dire de direction horizontale (axe ô, fig. 6). 3.1_ Dessiner le schéma cinématique minimal de la transmission du moto-réducteur à un rouleau en précisant les repères des différentes pièces. Calculer le rapport de réduction r1 de cette transmission.
3.2_ Donner l'expression littérale de la vitesse circonférentielle des brosses au niveau du rayon
Rb.
dans un repère lié au robot, en fonction de la vitesse de rotation du moteur. En déduire la valeur numérique de cette vitesse.3.3_ En régime établi, on constate un glissement des brosses sur le fond, glissement facilitant le nettoyage. La symétrie longitudinale permet de se ramener à une étude plane.
Faire un bilan des résultantes des actions agissants sur le robot et mettre en place leur modèle vectoriel sur le schéma de la figure 6.
3.4_ Calculer la vitesse de déplacement du robot. La traînée est toujours considérée proportionnelle à la vitesse de déplacement (cf. question 2); le coefficient vaut ici C2 = 67,5 N s/m.
Données complémentaires :
coefficient de frottement brosses- fond : f
=
0,35 force d'aspiration :Fa=
25 Nforce de refoulement:
F,=
15 N3.5_ Ce résultat vous paraît-il cohérent avec celui de la question 3.2?
3.6_ Tracer le graphe d'évolution de cette vitesse de déplacement en fonction du coefficient de frottement ou d'adhérence entre les brosses et le fond, en précisant les valeurs numériques. Commenter votre graphe.
3. 7 _ En déduire la puissance électrique nécessaire pour assurer un· déplacement sans glissement des brosses sur le fond.
4_ Etude de la montée verticale.
L'objectif de cette série de questions est de mettre en place les critères permettant la montée à la paroi.
On étudie le robot en début de montée dans la configuration a= 5° (figure 7), en négligeant les phénomènes dynamiques (accélérations nulles).
Hypothèses :
- L'effort d'aspiration est alors négligeable.
-Actions de l'eau due à l'avancement du robot négligeable. - Même type de contact sur le fond et les parois.
4.1_ Définir analytiquement ou graphiquement (sur la figure 7) l'adhérence minimum assurant la montée du robot. On se placera à la limite du glissement. Données complémentaires : coordonnées de 8 et D dans le repère GXYZ
8 (-202,0, 173); D (289,0,64)
4.2_ Comment évolue cette adhérence limite au fur et à mesure de l'inclinaison du robot jusqu'à la verticalité.
5_ Etude de la maîtrise de la trajectoire
Pour certaines applications particulières, on souhaite maîtriser la trajectoire du robot dans la piscine, et donc la vitesse de chacun des rouleaux-brosses. A cette fin, on veut asservir la vitesse de rotation de chacun des deux moteurs à courant continu équipant le robot. La configuration de fonctionnement est identique à celle proposée par la figure 6.
Le second objectif de cette étude est d'analyser les performances de l'asservissement en fonction du correcteur C(p).
Hypothèses :
-Centre de poussée A confondu avec le centre de gravité G.
- Résultante des actions de l'eau sur le robot, dues à son avancement, réduite à la traînée, c'est à dire de direction horizontale (axe ô -figure
6).
- Pas de glissement au niveau des rouleaux.
-La force d'aspiration
Fa
et la force de refoulement F,sont présentes. La vitesse angulaire de rotation d'un moteur est notéen.
celle d'un rouleau-brosse est notéenb.
Un moteur est piloté par une électronique de puissance (variateur) qui induit, au niveau de l'axe du moteur, un couple
r
proportionnel à 1<:~. tension Uen entrée du variateur :
r
=
Kp.
On donne K, = 0.2Nm/ V.Le moteur et la charge qu'il entraîne sont modélisés par la fonction de transfert G(p) liant la vitesse de rotation
n
de l'arbre moteur au coupler
appliqué au niveau de l'arbre moteur.Le schéma fonctionnel ci-dessous représente l'ensemble :
u
~[~--~
r
~~
G(p) 1n
~
Variateur Moteur+ Charge
Pour réaliser l'asservissement de vitesse, une dynamo tachymétrique est montée sur l'axe du moteur. Elle délivre une tension
u.
proportionnelle à la vitesse de rotation Q : Uv=
K2 .Q. On donne K2=
6V /(lOOotrs/min).0 0 ::J
g
c
;
m
~
il:
"U~
~a tension de consigne Uc pilotant la vitesse du moteur est comparée à
la tension Uv au niveau d'un soustracteur idéal qui donne en sortie le signal
E=Uc-Uv.
Le signal
e
est modulé par un correcteur de fonction de transfert C(p) pour fournir la tension U aux bornes du variateur.5.1_ Analyse mécanique et modélisation
5.1.1_ Le robo\ est en déplacement rectiligne et sa vitesse varie. La traînée est toujours considérée proportionnelle à la vitesse de déplacement (cf. question 2}, le coefficient vaut ici C2
=
67,5 N s/m.Ecrire les équations issues de l'application du premier principe de la dynamique.
5.1.2_ Déduire de J'analyse précédente la relation littérale liant la vitesse de rotation
n
d'un moteur au couple rappliqué sur l'arbre du moteur.Préciser alors, sous forme littérale et numérique, la fonction de transfert G(p).
Dans la suite on prendra G(p) = 9000.
p+2
5.1.3_ Schéma fonctionnel d'ensemble
Mettre en place le schéma fonctionnel complet de l'asservissement. Montrer que ce schéma est équivalent. à la mise en cascade d'un système bouclé à retour unitaire et d'un gain.
5.1.4_ Fonctions de transfert
Déterminer numériquement la fonction de transfert en boucle ouverte T(p) = U, en fonction de C(p). Quel intérët présente l'étude de cette fonction
e
de transfert pour l'asservissement?
Déterminer numériquement la fonction de transfert en boucle fermée
H(p) =
u.
du système boucléà
retour unitaire en fonction de C(p).uc
5.2_ Performances avec un correcteur proportionnel C(p)=K 5.2.1_ Détermination de la réponse indicielle en fonction de K
Calculer puis tracer sur une mëme figure la réponse du système défini par la fonction de transfert H (p)
à
un échelon unitaire pour K = 0.1 et K=
1. 5.2.2_ Analyse des tracésEvaluer la stabilité, la rapidité (temps de réponse), et la précision en régime permanent
à
partir des tracés. Que dire de l'influence deK
sur ces performances?
En appliquant le théorème de la valeur finale, retrouver l'erreur en régime permanent pour une entrée de type échelon unité en fonction de K.
Que faut-il faire pour annuler cette erreur ?
page 6
5.3_1ntroduction d'un correcteur intégral: C(p)= K
p
5.3.1_ Analyse harmonique de boucle ouverte pour K = 1
Lorsque C(p) =...!..,tracer, en coordonnées de Black, le lieu de transfert
p
de T(p) pour p = jm et me {0.1; 1; 2; 5; 10; 50; 100}. Préciser les asymptotes. Déterminer graphiquement la marge de gain et la marge de phase ; conclure quant
à
la stabilité et au bon amortissement du système ainsi corrigé. 5.3.2_ Réglage du gainK
Déterminer graphiquement K pour avoir une marge de phase de 45°.
Que dire des performances de l'asservissement ainsi corrigé
?
6_ Etude
des
possibilités
d'évolution
du
système
d'entraînement du robot
Certains carrelages sont extrëmement glissants, la perte d'adhérence ne permet plus alors
à
ce type de robot de fonctionner. Il est donc nécessaire de rechercher de nouveaux systèmes d'entraînement pour pouvoir nettoyer la piscine dans ces conditions.A la lumière de cette étude, proposer une solution afin de pallier le défaut d'adhérence des rouleaux sur le carrelage.
Nive
dl !; dl...
o. " Eg
•dl...
c..au 2
1 Bras flotteur " dl :0 J)l dl 't)z
..
-'i: (.) •Il) 'o dl !: 1 Module d'aspiration RobotNiveau 1
l
l
Unité Unité de nettoyage d'entraînement 1L
i 1 1 1B
Rouleaux Chenilles Pont brosses de gardeDocument 2 -Organigramme technique
'F
::1 Cl)15
:;:: {/) ..!!! {/)c:
Ill!?..
$
c: Cl) 0 ~,
Cl),
Cl) {/) Ill.c
a. c: Cl)0
..0 0a:
1 10e
::1 Cl ü: 1 1 Transmission MotoréducteurSession:
Intitulé épreuve :
Nom : ... Prénom : Né(e) le:
N" de centre d'écrit :
1
l
N" de table : 1 ]0 0 :J n 0
c
fil
m
w )> 3:,
~
Figure 5- Robot en phase de descente (sans les flotteurs)
i
i
i
__:!__---i---~
iG.A
i
---i
i
i
Figure 6- Robot sur le fond {sans les flotteurs)
Session:
Intitulé épreuve :
Nom : ... Prénom : Né(e) le:
N" de centre d'écrit :
r
1 N" de table: [ 1XA
1 1i
1 1 1 1 j 1 1 c::( 0~-~--==---==--=-!
-
....
U) ::J a>--
0 ::;:: U) a> U)c:
m U)-
a> 'Cl>-
c:
0E
a> "0-
::J .0 'Cl> "0c
a>-
0 .0 0a:
1""'
a>....
::J 0)ü:
::n
10..r-c
..,
(!) ~ 1 l:>....
0::r
;::; (!) 0-
c
..,
(!) 10 0 0" IllëD
0 0:s
n 0c
iiJ
m
w
>
:;:
"tt CIO è) Il 1 0 :r (!) :::l::::
(!) (/) Il1
Repère 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 \ Il 0 19 20 21 22 23 jO) 24 25 26 27 281
li
0 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 Désignation QuantitéUnité de nettoyage
PLATEAU INOX 1 BOITIER 2 SEUIL DE PORTE 2 FLASQUE R NU 1 FLASQUEO NU 1 COUVERCLE DE FOND 1 PATIN DE GARDE AU SOL 2 ROULETTE GARDE AU SOL 4 AXE DE ROULETTE 4ROULETTE FRONTALE 4 SUPPORT ROULETTE FRONTALE 4 ROULEAU COMPLET 4
AXE DE ROULEAU 2
MOUSSE ROULEAU 4
BROSSE P.V.C. 56
CLIPS POUR ROULEAU 16 TUBE ASPIRATION 2 PORTE BALAI SIMPLE GAUCHE EQUIPE 1 PORTE BALAI SIMPLE DROIT EQUIPE 1 PEIGNE PASSAGE CONNECTEUR 2 TIGE FILETEE FERMETURE PORTE EQUIPEE 2
POMPE COMPLETE 1
PATTE ACCROCHE BRAS EQUIPEE 2 BRAS ARTICULE COMPLET 1 FLOTTEUR DE BRAS ARTICULE PERCE 6 FLOTTEUR DE BRAS ARTICULE PLEIN 2
CAPOT NU 1
BOUCHON FILET NOIR COMPLET 1
Unité d'entraînement
CLOISON DE PONT 1 JOUE DE PONT NOIRE 2 EQUERRE SUPERIEURE PONT 1 EQUERRE INFERIEURE PONT 1 RENFORT AXE DE JOUE 2
MOTO REDUCTEUR 2
PATTE FIXATION MOTEUR 4 BUTEE MOTOREDUCTEUR 4 PALIER SUR CLOISON 3 PALIER SUR JOUE 2 RONDELLE PALIER SUR CLOISON 3 PIGNON D'ENTREE Z41 = 24 ; rn= 2 2
PIGNON INTERMEDIAIRE Z,2 = 36 ; rn = 2 8 PIGNON DE SORTIE
z.3
= 42 ; rn= 2 4 AXE DE PIGNON 42 4 RONDELLE CALE PIGNON 43 4 BAGUE D'ETANCHEITE 30/47/7 4-~-- -Document 1 - Nomenclature