Real Time Obstacle Detection on Non Flat Road Geometry through `V-Disparity' Representation
Texte intégral
Figure


Documents relatifs
Toutefois, ces auteurs ayant pour objectif une production avec le plus haut rendement possible de C69, ils ne tiennent pas compte dans leur discussion de la propriété remarquable
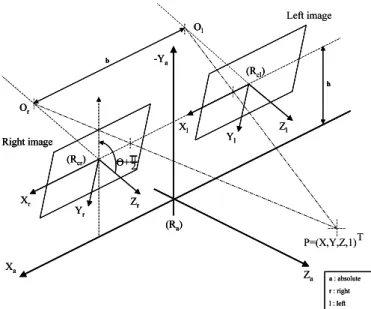
Initially, planes poses and camera motion are computed from a vertical and a horizontal blob by filtering their intersec- tion line and performing the SVD + 8-parameters
We introduce the design of our system that is divided in three parts : definition of geometric features describing road obstacles, multiclass object classification from an
The main technical contri- butions of the proposed approach are a novel adaptive soft voting scheme based on variable-sized voting region using confidence-weighted Gabor filters,
Based on a three-step process, (1) road primitives extraction, (2) road markings detection and tracking, (3) lanes shape estimation.. This algorithm combines several advantages at
Nevertheless, several characters that suggest relationships of the tadpoles to Latonia or Alytidae can be listed as the follow- ing: (1) the morphology of the parasphenoid (Biton et
It uses the illuminant invariance theory on color images to extract road surface feature, and classify the pixels using confidence interval, finally a stereo vision based road
This paper presents a real-time hardware architecture for vision-based obstacle detection and localization based on IPM (Inverse Perspective Mapping) for obstacle detection, and
