Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS Faculté des sciences du sport
Centre de recherches sur la cognition et l'apprentissage (Poitiers) (Diplôme National - Arrêté du 7 août 2006)
École doctorale : Cognition, comportements, langage(s) - CCL (Poitiers) Secteur de recherche : Sciences et Techniques des Activités Physiques et Sportives
Présentée par : Frédérique Bunlon
Influence de l'expérience sensorimotrice sur la perception et représentation des actions d'autrui
Directeur(s) de Thèse : Cédric Bouquet
Soutenue le 14 décembre 2015 devant le jury Jury :
Président Lucette Toussaint Professeur - Université de Poitiers Rapporteur Aymeric Guillot Professeur - Université de Lyon Rapporteur Arnaud Badets CR/HDR - Université de Bordeaux Membre Cédric Bouquet Professeur - Université de Poitiers
Membre André Didierjean Professeur - Université de Franche-Comté Membre Peter J. Marshall Professor - Temple University (USA)
Pour citer cette thèse :
Frédérique Bunlon. Influence de l'expérience sensorimotrice sur la perception et représentation des actions d'autrui [En ligne]. Thèse Sciences et Techniques des Activités Physiques et Sportives. Poitiers : Université de Poitiers, 2015. Disponible sur Internet <http://theses.univ-poitiers.fr>
Université de Poitiers
Ecole doctorale « Cognition, Comportements et Langage(s) »
-Faculté des Sciences du Sport
Centre de Recherches sur la Cognition et l’Apprentissage
CNRS
– UMR 7295
THÈSE
Pour obtenir le grade de d
octeur de l’Université de Poitiers
Spécialité : Sciences et Techniques des Activités Physiques et Sportives
Soutenue publiquement le 14 décembre 2015 par
Frédérique Bunlon
Sous la direction de Cédric Bouquet
Membres du jury :
Arnaud BADETS CR/HDR, Université de Bordeaux - Rapporteur Aymeric GUILLOT Pr, Université de Lyon - Rapporteur
André DIDIERJEAN Pr, Université de Franche-Comté - Examinateur Lucette TOUSSAINT Pr, Université de Poitiers - Examinateur
Peter MARSHALL Pr, Temple University (USA) - Examinateur Cédric BOUQUET Pr, Université de Poitiers – Directeur
Influence de l’expérience sensorimotrice sur la
perception et représentation des actions
Université de Poitiers
Ecole doctorale « Cognition, Comportements et Langage(s) »
-Faculté des Sciences du Sport
Centre de Recherches sur la Cognition et l’Apprentissage
CNRS
– UMR 7295
THÈSE
Pour obtenir le grade de d
octeur de l’Université de Poitiers
Spécialité : Sciences et Techniques des Activités Physiques et Sportives
Soutenue publiquement le 14 décembre 2015 par
Frédérique Bunlon
Sous la direction de Cédric Bouquet
Membres du jury :
Arnaud BADETS CR/HDR, Université de Bordeaux - Rapporteur Aymeric GUILLOT Pr, Université de Lyon - Rapporteur
André DIDIERJEAN Pr, Université de Franche-Comté - Examinateur Lucette TOUSSAINT Pr, Université de Poitiers - Examinateur
Peter MARSHALL Pr, Temple University (USA) - Examinateur Cédric BOUQUET Pr, Université de Poitiers – Directeur
Influence de l’expérience sensorimotrice sur la
perception et représentation des actions
R
emerciements
« Cela semble toujours impossible, jusqu'à ce qu'on le fasse. »
Nelson Mandela
Faire une thèse ? Plus qu’impossible, inimaginable il y a quelques années… Pour cela, je tiens tout d’abord à remercier chaleureusement Cédric Bouquet, mon directeur de thèse, qui m’a transmis son goût pour la recherche. Tu m’as permis de découvrir la recherche, mais surtout de vivre une aventure fabuleuse. Des boxes d’expérimentation à Philadelphie en passant par l’institut PPrime sur le site du Futuroscope, tu m’as accompagnée, conseillée, aidée, et écoutée. Je suis très heureuse de t’avoir eu pour directeur et te remercie encore de m’avoir donné cette chance de travailler avec toi.
Je remercie également Peter Marshall. Malgré la distance, il a su me conseiller et m’aider quand c’était nécessaire, et m’a également permis de vivre une expérience Américaine inoubliable.
J’exprime tous mes remerciements à l’ensemble des membres de mon jury : Arnaud Badets et Aymeric Guillot pour l’intérêt qu’ils ont porté à ce travail en acceptant d’en être rapporteurs. Je remercie également André Didierjean et Lucette Toussaint, pour avoir accepté de faire parti de mon jury de thèse en tant qu’examinateurs.
Je remercie aussi Floren Colloud, qui a oeuvré au rapprochement CeRCA-Pprime, et Jean-Pierre Gazeau qui m’a permis de découvrir un monde de robots, et de créer une collaboration très enrichissante.
J’adresse également mes remerciements à Sean Duffy, pour son accueil au sein de son laboratoire, ainsi qu’à Robrecht van der Wel, une rencontre très enrichissante qui je l’espère, mènera un jour à une nouvelle collaboration franco-américaine.
Enfin, ce travail de thèse n’aurait pu exister sans la participation des très nombreux étudiants et volontaires à mes expériences. Je les remercie tous pour le temps qu’ils m’ont accordé.
« La vie c’est comme une bicyclette, il faut avancer pour ne pas perdre l’équilibre » Albert Einstein
Il n’est pourtant pas toujours évident de rester en équilibre… Je tiens donc à remercier tous ceux qui m’ont permis d’avancer, de ne pas tomber, et aussi ceux qui m’ont
aidée à remonter en selle… Tout d’abord, je remercie chaleureusement mes collègues du CeRCA, mon équipe de cœur, les ATCO (avec une mention spéciale pour Lulu, merci pour tous tes conseils, aussi bien sur la thèse que sur les cours, ta bienveillance maternelle est un vrai cadeau), mais aussi ma nouvelle équipe C2SE. Nos échanges m’ont permis d’avancer dans mes recherches, de me questionner, et d’apporter des réponses à mes questions. Plus largement je remercie l’ensemble des personnels du laboratoire et des autres équipes, (Marie-Françoise, mille mercis pour ton aide précieuse, et ton chauffage !), ainsi que les collègues en STAPS (Karine et Sandra, grâce à vous, mes déplacements à Angoulême étaient un vrai plaisir !). Sans oublier les chercheurs nains : Lucie qui m’a fait découvrir la danse primitive, le mandala et autres activités de détente nécessaires à la survie durant la thèse… Seb, mon co-organisateur préféré des désormais mondialement connues « CeRCA Night », Christine, Sandrine, Nadia, Anne, François, Arnaud, Benjamin le pingouin, Medhi et Tartine! Les #0.34 : Aurore, André, Amira, Nirvanana et mon cher Nounagnon qui m’a tant apporté, et tant supporté aussi! Et enfin ma petite Marie K, qui m’a soutenue, encouragée, aidée, et accompagnée, dans la thèse comme dans les pauses (et qui me doit environ 367 boites de tic et tac)!
« Les amis c’est comme les étoiles, on ne les voit pas toujours, mais on sait qu’ils sont là. » Et que serait la vie sans les ami(e)s ? Je remercie donc mes Montam’ Zoulettes, grâce à qui j’ai pu décompresser durant les matchs, mais aussi (et surtout) en dehors ! Avec une mention spéciale aux morues : Mélina, Hélène, Leslie, Mélissa et Cora. Je remercie bien évidemment mes amis de cœur, Kaka, So’, Pépito et Drico, et bien sur mon Koko. La distance n’a pas toujours été facile, mais vous avez toujours été présents, c’est un cadeau de vous avoir dans ma vie. Je remercie aussi ma Kro, les Célines, Mathurin, les Botalies, les Sebs, Théo et tous ceux qui m’ont soutenue (et surtout supportée !) régulièrement. J’ai également une pensée pour Guillaume, qui m’a soutenue et encouragée, et qui a cru en moi, ainsi que sa famille.
Je remercie ma maman Américaine de cœur : Elie, ainsi que Roland, Oona, et bien sur Allegra. Grâce à vous mon séjour outre-Atlantique n’a pas été seulement enrichissant au niveau professionnel, mais m’a aussi permis de rencontrer de magnifiques personnes, qui font désormais parties de ma vie. Je vous remercie encore mille fois pour votre soutien à Philly.
Enfin, je tiens à remercier ma famille. Ces dernières années ont été difficiles, et la distance pas toujours facile à gérer. Au-delà d’un simple diplôme, la thèse est avant tout une aventure. Je vous remercie pour votre soutien inconditionnel. Tout d’abord ma maman, qui m’a redonné le courage d’avancer par ses petites attentions, ses petits plats, ses messages, et nos randos dans les bois. Je remercie aussi mes sœurs et mon frère : La Domi, qui m’a appelée régulièrement, m’a aussi préparé de bons petits plats et surtout m’a reboostée quand elle sentait que ça n’allait plus ! Marie et Jean-Louis, qui me soutiennent aussi, ainsi que Banban, Maripol, Maud et ses enfants, mes neveux, Marjo, Maria et Yvan, mais aussi Marielle, Roland, Solène, Mathieu, et aussi Ginette.
Et bien sur, toutes les personnes, qui par leur présence, leurs messages, leur
passage dans ma vie m’ont permis d’être qui je suis aujourd’hui.
Pour terminer, j’adresse mes plus belles pensées à Yeyette et Papa. Chaque jour vous m’accompagnez, et me manquez…
Publications dans des revues scientifiques internationales à comité de
lecture
Bunlon F., Marshall P.J., Quandt, L., & Bouquet C.A. (2015). Influence of action-effect
associations acquired by ideomotor learning on imitation. PLoS ONE. Doi: 10.1371/journal.pone.0121617.
Bunlon F., Marshall P.J., & Bouquet C.A. (soumis). Investigation of the influence of
ideomotor learning on automatic imitation: effector priming is not modulated by prior action-effect learning.
Communications affichées dans des congrès internationaux
Bunlon F., Gazeau, J.P., Colloud, F., & Bouquet, C.A. « Effet d u e expérie ce se
sori-motrice sur une tâche conjointe réalisée avec un co-acteur humain et non-humain ». Congrès ACAPS, Nantes (France), Octobre 2015. Prix de la communication affichée.
Bunlon F. & Bouquet C.A. « Effect of Sensorimotor Experience on the Perception of Facial
Expressions ». Congrès ICPS, Amsterdam (Pays-Bas), Mars 2015.
Bunlon F., Marshall P.J., & Bouquet C.A. « I flue ce d u e expérie ce se sori otrice sur
l i itatio i te tio elle ». Congrès ACAPS, Grenoble (France), Octobre 2013.
Ce travail de re her he a fait l’o jet de :
- 1 publication dans une revue scientifique internationale à comité de lecture
- 1 manuscrit soumis à publication
- 3 communications affichées dans des congrès internationaux
Communications/présentations orales
Bunlon F., « Effet d u appre tissage se sori- oteur sur l i itatio ». Communication
orale aux journées doctorales Cognition, Comportements et Langage(s) , Limoges (France), Mars 2014.
Bunlon F., « Impact des interactions homme- achi e sur la perceptio des actio s d u
robot humanoïde ». Communication orale : participation au concours « ma thèse en 180 secondes », https://www.youtube.com/watch?v=_Oi2G5gO-Hg finaliste régionale, Poitiers (France), Mars 2014.
Bunlon F., « Influence of belief on Automatic imitation ». Présentation en séminaire à
l U iversité ‘utgers, Ca de USA , Jui .
Ce travail a été réalisé au sein du Centre de Recherches sur la Cognition et l Appre tissage Ce‘CA, Université de Poitiers, CNRS UMR 7295). Les expérimentations principales rapportées ici se sont notamment déroulées à Poitiers, dans les locaux de la Maiso des Scie ces de l Ho e et de la Société. U e partie de la mise en place des protocoles et des pré-expérimentations a été réalisée da s le cadre d u séjour à Te ple University (Philadelphie, USA), dans le laboratoire de Peter Marshall (Developmental Science lab., département de Psychologie).
Sommaire
INTRODUCTION GENERALE ... 1
CHAPITRE 1. IMITATION & LIENS PERCEPTION-ACTION ... 9
1.1.L’IMITATION ET LE PROBLEME DE LA CORRESPONDANCE ... 10
1.1.1. L’imitation volontaire vs. automatique ... 12
1.1.2. Le problème de la correspondance ... 13
1.2.REPONSES AUX PROBLEMES DE LA CORRESPONDANCE ... 14
1.2.1. Le modèle AIM (Active Intermodal Mapping) ... 14
1.2.2. Le modèle ASL (Associative Sequence Learning) ... 16
1.2.3. La théorie idéomotrice... 19
1.3.LE SYSTEME DES NEURONES MIROIRS ... 24
1.4.OMNIPRESENCE ET AUTOMATICITE DE L’IMITATION ... 27
1.4.1. Effet caméléon ... 27
1.4.2. Phénomènes d’interférence et de facilitation motrice (priming moteur) ... 30
1.5.LE SYSTEME MIROIR ET LE CIRCUIT DE L’IMITATION ... 37
1.6.FONCTION(S) SOCIALE(S) DE L’IMITATION ET DES PHENOMENES MIROIRS ... 39
1.6.1. La compréhension d’autrui et de son action ... 39
1.6.2. La communication sociale ... 41
1.7.INFLUENCE DE L’APPRENTISSAGE SUR LES LIENS PERCEPTION-ACTION ... 43
1.7.1. Données neurophysiologiques : Influence de l’expertise sur la résonance motrice ... 43
1.7.2. Influence d’un apprentissage sensorimoteur sur l’imitation automatique et la résonance motrice ... 45
1.7.3. Influence de l’apprentissage idéomoteur sur l’imitation automatique ... 48
1.7.4. Implications quant aux fonctions de la résonance motrice ... 50
Résumé ... 52
CHAPITRE 2. IMITATION & APPRENTISSAGE IDEOMOTEUR ... 53
2.1.ETUDE 1.IMITATION INTENTIONNELLE ET APPRENTISSAGE IDEOMOTEUR ... 54
Apprentissage idéomoteur et imitation ... 58 La présente étude ... 59 2.1.1. Expérience 1 ... 60 Méthode ... 61 Résultats et Discussion ... 66 2.1.2. Expérience 2 ... 71 Méthode ... 72 Résultats et Discussion ... 73
2.1.3. Discussion générale de l’Etude 1 ... 78
2.2.ETUDE 2 :IMITATION AUTOMATIQUE ET APPRENTISSAGE IDEOMOTEUR ... 84
2.2.1. Expérience 1 ... 89
Méthode ... 90
Résultats et discussion ... 95
2.2.2. Expérience 2 ... 101
Pré-expérience : mesure de l’imitation automatique ... 101
Méthode ... 102 Résultats et Discussion ... 104 Expérience ... 105 Méthode ... 105 Résultats et Discussion ... 106 2.2.3. Expérience 3 ... 112 Méthode ... 112 Résultats et Discussion ... 113 2.2.4. Expérience 4 ... 118 Méthode ... 118 Résultats et Discussion ... 120
2.2.5. Discussion générale Etude 2 ... 124
Résumé ... 134
CHAPITRE 3. TACHE CONJOINTE : INTERPRETATION & MODULATION DE L’EFFET SIMON SOCIAL ... 135
3.1.TACHE CONJOINTEET CO-REPRESENTATION DE L’ACTION ... 136
3.1.2. L’effet Simon social (ou effet Simon conjoint)... 139
3.2.INTERPRETATION INITIALE DE L’EFFET SIMON SOCIAL : CO-REPRESENTATION DE L’ACTION D’AUTRUI ... 141
3.3.L’EFFET SIMON SOCIAL EST-IL VRAIMENT « SOCIAL » ? ... 143
L’hypothèse du référentiel spatial ... 143
Impact de la saillance du ‘co-acteur’ ... 145
3.4.DETERMINANTS DE L’EFFET SIMON SOCIAL ... 147
3.4.1. Influence de la nature du co-acteur ... 147
3.4.2. Impact de facteurs sociaux sur la co-représentation de la tâche ... 149
3.5.INTERPRETATION DE L’EFFET SIMON SOCIAL DANS LE CADRE IDEOMOTEUR ... 152
Résumé ... 156
CHAPITRE 4. EXPERIMENTATION :EXPERIENCE IDEOMOTRICE & TACHE CONJOINTE ... 157
4.1.PARTAGE DE TACHE AVEC UN AGENT NON-HUMAIN ... 158
4.2.EXPERIENCE ET DETECTION DE SIMILITUDE ENTRE SOI ET AUTRUI ... 159
4.3.ETUDE 3.EXPERIENCE IDEOMOTRICE ET CO-REPRESENTATION DE L’ACTION ... 161
4.3.1. Expérience 1 ... 163 Méthode ... 163 Résultats et Discussion ... 167 4.2.2. Expérience 2 ... 172 Méthode ... 172 Résultats et Discussion ... 174
4.2.3. Discussion Générale de l’Etude 3 ... 177
Résumé ... 182
CHAPITRE 5. DISCUSSION GENERALE ... 183
BIBLIOGRAPHIE ... 196
Liste des Figures
Figure 1. Illustration de l’imitation chez les nouveau-nés âgés de 2-3 semaines, selon Meltzoff et Moore (1977) ... 11
Figure 2. Active Intermodal Mapping (AIM), selon Meltzoff et Moore (1997) ... 16
Figure 3. Associations verticales et horizontales, selon le modèle ASL d’après Heyes (2005) ... 18
Figure 4. Illustration de l’activité d’un neurone miroir selon Rizzolatti, Fabbri-Destro, & Cattaneo (2009) ... 25
Figure 5. Effet Caméléon, selon Chartrand et Bargh (1999) ... 28
Figure 6. Stimuli utilisés par Heyes et al., (2005) ... 32
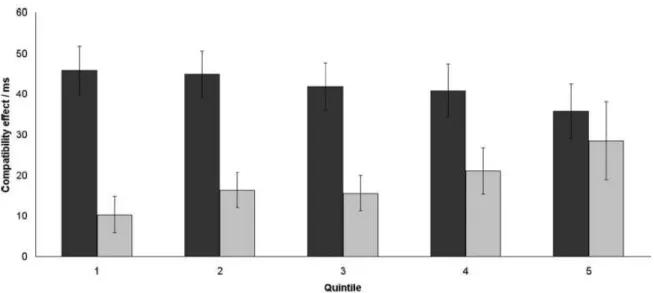
Figure 7. Effets de Compatibilité Imitative et de Compatibilité Spatiale selon les quintiles, selon Catmur et Heyes (2010) ... 33
Figure 8. Stimuli utilisés par Press et al. (2005) afin de contraster l’imitation automatique induite par des mouvements d’un être humain ou d’un robot ... 35 Figure 9. Résultats obtenus par Kilner et al. (2003) représentant la variabilité orthogonale
du mouvement suite à l’observation de mouvements de bras ... 35
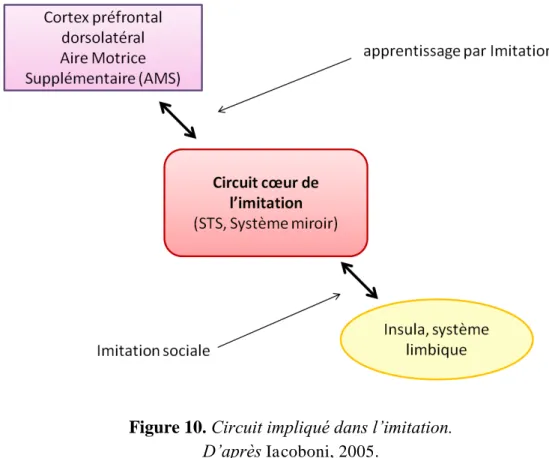
Figure 10. Circuit impliqué dans l’imitation d’après Iacoboni (2005) ... 38 Figure 11. Temps de réaction moyen obtenu lors des essais compatibles et incompatibles
après une phase d’apprentissage sensorimoteur, selon Heyes et al., (2005) ... 47
Figure 12. Illustration d'un essai dans la tâche de priming moteur dans l'étude de Wiggett et al., (2011) ... 49
Figure 13. Exemples de stimuli utilisés pour la tâche d’imitation intentionnelle durant nos Expérience 1 et 2 Etude 1 ... 63
Figure 14.Illustration de la phase d’acquisitionutilisée dans l’Etude 1 ... 65 Figure 15. Temps de réaction moyen en pré et post-test durant l’Expérience 1 Etude 1, pour les groupes Apprentissage Compatible et Apprentissage Incompatible. ... 69
Figure 16. Temps de réaction moyen en pré et post-test durant l’Expérience 2 Etude 1, pour les groupes Apprentissage Compatible et Apprentissage Incompatible. ... 76
Figure 17. Exemple de stimuli utilisés pour la tâche d'imitation automatique durant l’Etude 2 ... 92 Figure 18. Illustration de la tâche d'amorçage moteur dans l'Expérience 1 Etude 2 ... 93
Figure 19. Expérience 1 Etude 2 : Temps de réaction moyen (ms) en fonction des bins ... 96
Figure 20. Expérience 1 Etude 2 : Effet de compatibilité imitative (en ms) mesuré en pré- et post-test dans la tâche d’amorçage moteur ... 98 Figure 21. Récapitulatif des différentes conditions présentes dans la tâche d’amorçage
moteur de l’Expérience 2 Etude 2 ... 104
Figure 22. Expérience 2 Etude 2 : Temps de réaction moyen obtenu durant la phase d'acquisition en fonction des bins ... 107
Figure 23. Expérience 2 Etude 2 : Effets de Compatibilité Spatiale et Imitative mesurés
dans la tâche d’amorçage moteur en Pré- et Post-test ... 109
Figure 24. Expérience 2 Etude 2 : Décours temporel de la Compatibilité spatiale et de la Compatibilité imitative en fonction des bins ... 111
Figure 25. Expérience 3 Etude 2 : Effet de compatibilité imitative en fonction des bins dans la tâche d'amorçage moteur. ... 116
Figure 26. Expérience 4 Etude 2 : Effet de compatibilité imitative en pré- et post-test pour chez les participants ayant démontré un effet de compatibilité imitative supérieur à 5ms en pré-test ... 122
Figure 27. Pattern des résultats obtenus par Simon et Rudell (1967) ... 138
Figure 28. Design expérimental représentant les deux conditions go/no-go utilisées par Sebanz et al. (2003) ... 140
Figure 29. Illustration du protocole expérimental utilisé par Dolk et al., (2013) ... 146
Figure 30. Illustration du design expérimental utilisé par Tsai et Brass (2007) ... 147
Figure 31. Temps de réaction moyen pour les essais compatibles et incompatibles, dans une tâche conjointe go/no-go réalisée avec un robot décrit « comme un humain » et un robot décrit « comme une machine » , selon Stenzel et al., 2012 ... 149
Figure 32. Schématisation de l’hypothèse du Codage référentiel, selon Dolk et al., (2013, 2014) dans une tâche Simon de type go/no-go individuelle et conjointe. ... 154
Figure 33. Illustration du design expérimental utilisé pour mesurer la co-représentation de
Figure 34. Utilisation de l’exosquelette durant la phase d’expérience sensorimotrice du groupe « Actif » , Etude 3 ... 167
Figure 35. Expérience 1 Etude 3 : Effet Simon social selon le type de co-acteur (Humain vs. Robotique) durant le pré-test ... 168
Figure 36. Expérience 1 Etude 3 : Effet Simon social mesuré en pré- et post-test pour les deux groupes, en fonction du type de co-acteur. ... 170
Figure 37. Illustration des stimuli utilisés dans l’Expérience 2 Etude 3 ... 173 Figure 38. Expérience 2 Etude 3. Effet Simon social selon le type de co-acteur en pré-test
... 175 Figure 39. Expérience 2 Etude 3 : Effet Simon social mesuré en pré- et post-test, dans les groupes Actif et Passif, selon la nature du co-acteur (humain vs. robotique). ... 176
Figure 40. Illustration schématique du modèle de l’apprentissage par imitation d’après Paulus, 2014 ... 187
1
Introduction
Générale
2
« Un tousseur continuel irrite mon poumon et mon gosier »
Montaigne
Dans cette réflexion datant du XVIème siècle, Montaigne exprimait déjà l’idée que l’action d’autrui pouvait influencer, moduler notre propre comportement. Nous sommes sans cesse amenés à interagir avec autrui et les répercussions de ces interactions ont largement interrogé la communauté scientifique.
Les mécanismes de la perception et de la représentation de l’action d’autrui ont été depuis longtemps l’objet de réflexions en psychologie, notamment à travers l’étude de l’imitation (Piaget, 1978). Les recherches sur l’imitation ont connu ces dernières années un regain d’intérêt notamment grâce à la découverte des neurones miroirs (Di Pellegrino, Fadiga, Fogassi, Gallese, & Rizzolatti, 1992). Cette découverte majeure des années 1990 a conduit de nombreux chercheurs à se questionner sur le rôle, la (les) fonction(s) et l’origine de ces neurones qui semblent jouer un rôle majeur dans la perception et la compréhension des actions d’autrui, en mettant en correspondance l’action perçue avec une représentation motrice correspondante. L’existence d’un lien étroit entre perception et action –qui pourrait être sous-tendu par le système des neurones miroirs– est au centre de ce travail de thèse, et à travers des études comportementales nous avons cherché à contribuer à une meilleure compréhension de ces phénomènes.
Une idée centrale dans ce travail est que la perception de l’action d’autrui va se traduire par une activation chez l’observateur de processus similaires à ceux qui seraient mis en jeu s’il réalisait lui-même l’action observée (Grèzes, Armony, Rowe, & Passingham, 2003). On peut parler alors d’une ‘représentation partagée’ ou d’une ‘ co-représentation’ de l’action (Hommel, Müsseler, Aschersleben, & Prinz, 2001 ; Jeannerod,
3 Parallèlement à cela, une théorie a particulièrement inspiré nos recherches. Nous nous sommes appuyés sur la théorie idéomotrice, selon laquelle les actions sont représentées en termes de leurs effets perceptifs (Greenwald, 1970 ; James, 1890 ; Prinz, 2005 ; Shin, Proctor, & Capaldi, 2010 ; Stock & Stock, 2004). Lorsque l’individu souhaite réaliser une action, il activerait une « image » des effets produits par cette action, ce qui déclencherait l’exécution du mouvement associé à ces effets (Greenwald, 1970 ; Koch, Keller, & Prinz, 2004). De ce codage de l’action en termes d’effets perceptifs, il découle que les actions que nous percevons et les actions que nous produisons sont représentées dans un même format (Prinz, 2005 ; Wohlschläger, Gattis, & Bekkering, 2003). Un corollaire de ce codage commun est que l'observation d'une action engendrerait l'activation de sa représentation motrice (Prinz, 2005 ; Shin et al., 2010).
La théorie postule par ailleurs que le codage de l’action en termes d’effets perceptifs, est permis par l’apprentissage idéomoteur : les associations entre les effets perceptifs et les codes moteurs de l’action sont construits à travers l’expérience (nous apprenons à associer nos actions à leurs effets ; Prinz, 2005). Notre questionnement concerne notamment la construction de ces liens entre perception et action et/ou leur potentielle modulation par l’expérience.
Nous avons abordé les liens entre perception et action sous l’angle des comportements d’imitation. Thème central de ce travail de recherche, l’imitation peut être vue comme un comportement bénéfique et nécessaire au développement de l’individu (Petit & Pascalis, 2009), bien que parfois non approprié pour l’action en cours. De plus, comme le soulignent certains auteurs, il convient de noter que l’imitation possède une double dimension : une dimension dite cognitive et une dimension sociale. En effet, l’imitation implique les compétences cognitives de l’individu, et s’inscrit simultanément dans un contexte social et culturel. Ces deux dimensions sont complémentaires : l’imitation
4 permet l’apprentissage de nouvelles actions (fonction cognitive) et elle faciliterait par ailleurs les interactions avec autrui (fonction sociale) (Baldwin, 1894 ; Meltzoff, 2007a ; Meltzoff & Gopnik, 1993 ; Nadel, Guérini, Pezé, & Rivet, 1999 ; Tomasello, 1999 ; Uzgiris, 1981). D’une part, elle permet donc d’apprendre de nouvelles habiletés, en imitant par exemple les gestes de l’expert. En atteste l’une des premières définitions de l’imitation donnée par Thorndike (1898), qui la caractérisait comme le fait d’apprendre à faire un acte en le voyant faire. Cette situation se retrouve dans de nombreux apprentissages : en effet, n’est-il pas plus aisé de montrer au débutant le geste attendu, la chorégraphie, le mouvement, plutôt que de lui expliquer techniquement l’action à réaliser ? « Pourriez-vous apprendre à danser le tango par téléphone ? »s’interrogent Brass et Heyes (2005, p. 489).
Peut-être, mais il semble plus facile d’apprendre en regardant les pas de danse plutôt qu’en écoutant les instructions. Cette apparente facilité, comme le soulignent les auteurs, soulève de nombreuses questions quant aux mécanismes permettant la transformation de l’action observée en un programme moteur correspondant (problème de la correspondance)
(Dauttenhahn & Nehaniv, 2002). D’autre part, il semble que l’imitation et les mécanismes qui la sous-tendent aient une fonction sociale importante, permettant aux individus de comprendre l’action d’autrui ainsi que ses intentions, ce qui pourrait constituer une base pour l’empathie (Iacoboni, 2009). De plus, comme le souligne Nadel (2005), l’imitation permet également d’établir une communication et de la maintenir. En effet, imiter peut signifier entrer en relation avec l’autre, capter son attention et montrer qu’on s’intéresse à lui (Raimondi, 2009). L’imitation constitue finalement pour certains le fondement de l’humanisation et le moyen qui a rendu possible la culture (Baudonnière, 1998 ; Hurley & Chater, 2005 ; Rizzolatti, 2014).
Des travaux suggèrent l’existence de comportements imitatifs chez le nouveau-né âgé de seulement quelques jours (Meltzoff & Moore, 1977). L’imitation, contribuant à
5 l’apprentissage et la communication, pourrait ainsi jouer un rôle crucial dans la construction de l’individu et de son rapport à autrui.
Il est important de préciser que plusieurs types d’imitation existent chez l’homme. Dans le cadre de nos travaux, nous avons utilisé des tâches permettant d’examiner l’imitation intentionnelle, et l’imitation automatique. L’imitation intentionnelle renvoie au fait d’imiter de manière volontaire l’action observée alors que l’imitation automatique correspond à l’influence automatique, pas nécessairement consciente, de l’action observée sur le comportement de l’individu. Chartrand et Bargh (1999) parlent d’un « effet caméléon » : lorsque nous sommes exposés aux comportements d’autrui, nous avons tendance à imiter automatiquement ses postures, manières, expressions faciales, intonations de voix, et autres comportements. Egalement désignée par les termes de « contagion motrice » (Blakemore & Frith, 2005 ; Bouquet, Shipley, Capa, & Marshall, 2011), cette forme d’imitation est automatique et involontaire. Ainsi, le comportement du sujet observé va se retrouver dans (ou simplement impacter) celui du sujet observateur.
Enfin, il est à noter que l’imitation est au cœur d’un riche champ de recherches recouvrant de nombreuses disciplines telles que la psychologie sociale, développementale, cognitive, mais aussi les neurosciences, l’éthologie, la primatologie, ou encore la robotique (Heyes, 2001). Une telle attractivité démontre la richesse de ce comportement humain et des questions qui l’entourent encore aujourd’hui.
Etudiée tout d'abord dans le cadre de l'imitation, la question de la représentation de l’action d’autrui a également été abordée ici sous l'angle du partage de tâche. Dans la vie de tous les jours, les individus interagissent fréquemment avec autrui. S’associer pour réaliser une action (comme par exemple déplacer un meuble avec un partenaire), ou encore se coordonner pour atteindre un but, sont des comportements présents dans le quotidien de l’être humain. Notons que le partage d’une tâche correspond ici plus précisément à « toute
6 forme d’interaction sociale où deux ou plusieurs individus coordonnent leur action dans l’espace et le temps afin d’apporter un changement dans l’environnement » (Sebanz, Bekkering, & Knoblich, 2006, p. 70). Au-delà de l’apparente collaboration entre plusieurs individus, il semblerait que la réalisation conjointe d’une tâche implique des représentations partagées entre les co-acteurs (Sebanz, Knoblich, & Prinz, 2003). Lorsque j’interagis avec un partenaire, non seulement mon action, mais également celle de mon partenaire seraient représentées dans mon propre système, me permettant ainsi une meilleure coordination. Lorsque l’être humain réalise une tâche conjointe avec un partenaire, il créerait donc une co-représentation de la tâche, en intégrant l’action du partenaire à son propre répertoire de possibilités d’actions dans ce contexte (Sebanz et al., 2003, 2006). Mais cette représentation partagée de la tâche est-elle toujours possible ? Peut-on favoriser la coordination entre deux individus ? Que se passe-t-il au niveau cognitif lors du partage de la tâche ? Peut-on interagir de la même manière avec chaque être humain ? Et dans un monde où la robotisation et l'automatisation de nombreux procédés prennent une place de plus en plus importante, interagissons-nous de la même manière avec un agent non-humain ? Dans une démarche similaire à celle adoptée dans notre travail sur l’imitation, nous avons examiné si ce partage de tâche pouvait être dépendant de l’expérience de l’individu (i.e. si une expérience de type idéomotrice pouvait modifier le comportement de l’individu dans une situation de tâche conjointe).
Le but de ce travail de thèse est de participer à une meilleure compréhension des mécanismes par lesquels nous nous représentons nos propres actions et celles des autres. En nous situant notamment dans la perspective de la théorie idéomotrice, nous avons examiné dans quelle mesure l’apprentissage ou l’expérience peut modifier la représentation de l’action d’autrui, dans le cadre de l’imitation ou du partage de tâche. A travers cela, il
7 s’agissait d’éclairer les mécanismes mis en jeu dans ces situations et plus largement de contribuer au débat concernant le développement d’un système de représentation de l’action codant de façon similaire les actions de soi et d’autrui (Jeannerod, 2001 ; Prinz, 2005).
Un premier objectif est de démontrer l’influence d’un apprentissage idéomoteur sur l’imitation. Nous avons testé comment l’imitation (automatique et
intentionnelle) peut être modulée par la création de nouvelles associations sensorimotrices, afin de valider une approche de l’imitation où celle-ci repose sur des associations que possèdent les individus entre l’action observée et l’action réalisée. Ce travail visait à démontrer qu’un apprentissage couplant l’exécution d’une action A à l’observation d’une action B pouvait moduler le comportement de l’individu dans une tâche subséquente d’imitation impliquant la perception de l’action B.
Un second objectif est de tester l’influence d’une expérience de type idéomotrice sur la façon dont nous nous représentons les actes d’autrui en situation de partage de tâche. Ces travaux s’inscrivent dans la continuité de récentes recherches initiées dans les années 2000 (e.g. Sebanz et al., 2003, 2006) et prennent donc place dans ce domaine encore peu connu, riche en hypothèses et en questionnements, mais qui constitue un cadre pertinent pour étudier la représentation des actions d’autrui. Nos recherches visaient à examiner l’influence de l’expérience sensorimotrice sur les performances dans une situation de tâche conjointe, selon la nature du co-acteur (humain vs. non-humain) interagissant avec le participant. De récentes études ont effectivement démontré que lorsque la tâche est partagée avec un partenaire non-humain (e.g. un robot), alors le participant ne développe pas de co-représentation de la tâche : il se comporte comme s’il réalisait la tâche seul, en l’absence de partenaire (Tsai & Brass, 2007). Cette absence (ou diminution) de la co-représentation de la tâche en présence d’un co-acteur
8 non-humain nous a conduit à examiner comment une expérience liant le mouvement de l’individu à celui d’un robot pourrait amener à un changement dans la prise en compte des actions de ce partenaire dans une situation de tâche conjointe.
Pour aborder ces questions, il conviendra de définir, dans une première partie, le cadre théorique dans lequel s’inscrivent nos recherches. Plus précisément, il s’agira, en lien avec notre premier objectif, de spécifier ce qu’est l’imitation, ses mécanismes et ses caractéristiques, et d’autre part de définir certaines théories éclairant les processus mis en jeu dans la perception de l’action d’autrui (notamment la théorie idéomotrice).
Un chapitre expérimental constituera notre deuxième partie où nous exposerons nos hypothèses avant de présenter deux de nos trois études. Ces deux études consistent en des séries d’expérimentations portant sur l’effet d’une expérience sensorimotrice sur l’imitation. Notre première étude a concerné plus précisément l’effet de l’apprentissage idéomoteur sur l’imitation intentionnelle ; la deuxième étude, consacrée à l’imitation automatique, a examiné comment cette forme d’imitation peut également être modulée par un tel apprentissage idéomoteur ou par un apprentissage sensorimoteur de type stimulus-réponse.
Dans un troisième chapitre, nous aborderons la co-représentation de l’action en situation de tâche partagée. Nous développerons dans ce chapitre certains éléments théoriques spécifiques liés aux situations de partage de tâche sur la base desquels nous avons construit nos hypothèses.
Nous présenterons ensuite notre troisième étude composée de deux expériences dans un quatrième chapitre.
Enfin, nous terminerons par une discussion générale et une ouverture sur des perspectives de recherche.
9
CHAPITRE 1
Imitation & Liens
perception-action
10
1.1. L’imitation et le problème de la correspondance
Au sein de la littérature, il existe de nombreuses définitions et conceptions de l’imitation (cf. Subiaul, 2010). Nous considérerons dans notre travail que l’imitation correspond à la copie, par un observateur, de certaines caractéristiques du comportement moteur d’un modèle (Byrne, 2003 ; Heyes, 2001). Cette ‘copie’ implique un lien de causalité entre les caractéristiques du mouvement observé et l’exécution, par l’observateur, d’un mouvement ayant les mêmes caractéristiques. La relation de causalité est importante dans la mesure où elle permet d’exclure les cas où il y aurait une co-occurrence de ces deux évènements par hasard (Heyes, 2001).
Selon Baudonnière (1998), l'imitation « est à la base du processus d'humanisation
et de l'avènement de la culture » (p. 41). En effet, pour de nombreux auteurs, elle
permettrait notamment la transmission de la culture, les apprentissages, et permettrait également de faciliter les interactions sociales (cf. Hurley & Chater, 2005).
L’imitation conduit à l’élaboration d’un répertoire d’actions, de représentations motrices, de relations entre objets et actions de plus en plus complet. Mais avec elle s’exerce également la distinction entre ce que je fais et ce que je vois faire par autrui, autrement dit, entre moi, auteur et responsable de mes actions, et l’autre. A travers cela, l’imitation joue un rôle prépondérant dans la formation de l’individu, d’une part permettant les apprentissages, et d’autre part favorisant les interactions sociales (Nadel, 2005). Ce
Ce premier chapitre introduit le cadre théorique dans lequel s’inscrivent nos
différentes études. Nous traiterons notamment de la théorie idéomotrice et des
comportements d’imitation. Nous apporterons les bases permettant d’aboutir à notre
11 comportement semblerait être présent chez l’être humain dès sa naissance. En effet, Meltzoff et Moore (1977) ont montré la présence de comportements imitatifs chez le nouveau-né âgé de seulement quelques jours (voir cependant Anisfeld, 2005 ; Jones, 2009). Dans leur étude, les auteurs ont présenté aux bébés, âgés de 12 à 21 jours, quatre gestes différents (protrusion de la langue, ouverture de la bouche, protrusion de la lèvre, mouvement de doigts) (Figure 1). Chaque expression était montrée durant 15 secondes, intercalée avec un visage neutre durant 20 secondes. Les réponses des nouveau-nés étaient alors enregistrées.
Figure 1. Illustration de l’imitation chez les nouveau-nés âgés de 2-3 semaines. Les photographies présentent des enfants imitant les expressions faciales d’un adulte.
Source : Meltzoff et Moore, 1977.
Les résultats montrent que les nouveau-nés sont capables d’imitation : lorsque l’adulte a tiré la langue par exemple, le nouveau-né a subséquemment tendance à produire ce comportement. Selon la théorie développée par Meltzoff, cette faculté d’imitation du nouveau-né lui permettrait au cours du développement de percevoir les autres « comme lui » (Hypothèse « like me ») (Meltzoff, 1990, 2007b ; Meltzoff & Moore, 1995). Dès lors, en comprenant que les autres sont « comme moi » dans leurs actions et comportements, se
12 développe progressivement l’idée que les autres sont également « comme moi » dans leur état mental (théorie de l’esprit) (Meltzoff, 2005, 2007b).
1.1.1. L’imitation volontaire vs. automatique.
D’une part, l’imitation peut se définir comme un comportement volontaire, intentionnel, par exemple lorsque le débutant souhaite imiter le geste de l’expert pour apprendre une nouvelle technique. Il s’agit de transformer un input visuel en commande motrice de façon à ce que le mouvement réalisé corresponde au mouvement du modèle (Wohschläger et al., 2003). Ce type d’imitation est particulièrement utilisé dans les apprentissages. En effet, comme le soulignent Brass et Heyes (2005), il apparait parfois plus facile d’imiter le mouvement observé que de suivre des instructions, notamment dans l’apprentissage de mouvements. Les auteurs prennent l’exemple du tango : n’est-il pas plus facile d’apprendre une chorégraphie en imitant les gestes du professeur plutôt que de suivre ses instructions ? En effet, diverses autres activités pourraient illustrer cette facilitation des apprentissages liée à l’observation du geste à effectuer. En attestent les nombreux tutoriels vidéos qui fleurissent sur internet, où de nombreuses actions sont filmées (e.g. se coiffer, repeindre un mur, cuisiner ou encore fabriquer ses meubles), pour être ensuite reproduites, imitées par les internautes. Ces vidéos semblent plus pertinentes pour apprendre à réaliser certaines actions qu’une notice ou encore de simples instructions sans démonstration. De plus, comme le souligne Iacoboni (2005), l’apprentissage par imitation revêt un caractère hautement attrayant car il fournit une forme d’apprentissage qui est centré immédiatement sur le comportement adéquat sans passer par un apprentissage par essai-erreur.
D’autre part, il est important de noter que certains comportements sont considérés comme imitatifs, sans toutefois impliquer l’intentionnalité de l’agent (e.g. « l’effet
13
caméléon », Chartrand & Bargh, 1999). Ainsi l’imitation englobe à la fois la reproduction consciente ou inconsciente d’un modèle ou d’un phénomène quelconque (Carric, 2001 ; Heyes, 2011). Nous étudierons ces deux versants de l'imitation : l'imitation intentionnelle et l'imitation automatique. Dans ces deux situations, le comportement du sujet observé se retrouve chez l’observateur (ou influence son comportement), néanmoins, concernant l’imitation automatique, cela se produit à l’insu de l’individu, alors que dans l’imitation intentionnelle c’est le sujet qui a choisi de faire correspondre son mouvement au mouvement observé.
1.1.2. Le problème de la correspondance
Malgré la diversité des caractéristiques pouvant définir les comportements d’imitation, de manière générale ceux-ci impliquent une transformation de l’action observée en un programme moteur correspondant. Ainsi se pose le problème de la
correspondance : comment l’imitateur peut-il faire correspondre son action à l’action observée (Brass & Heyes, 2005 ; Dauttenhahn & Nehaniv, 2002) ? Lorsque nous observons autrui agir, nous ne pouvons voir les activations musculaires à l'origine de ses mouvements, mais seulement les conséquences externes de ces activations. Nous sommes capables d’observer et de comprendre les actions d’autrui, sans toutefois connaître la « manière » dont l’action a été initiée (Froese, Lenay, & Ikegami, 2012). De plus on peut établir une distinction entre deux types d’actions : d’une part les actions dites « transparentes », telles que les mouvements de parties corporelles visibles de soi-même, et les actions dites « opaques », telles que les expressions faciales, non visibles directement par celui qui effectue l’action (Heyes, 2005). Dans le cadre des actions opaques, nous ne pouvons observer les conséquences de nos propres actions. Ces actions font référence à certains mouvements qui sont différents dans leur aspect et leur « ressenti » lorsqu'ils sont
14 observés et lorsqu'ils sont exécutés (Heyes & Ray, 2000). Par exemple, comme le souligne Heyes (2009), lorsque j'observe autrui froncer les sourcils, je perçois deux « arcs » (les sourcils) se soulever en dessinant une ellipse. Toutefois, lorsque je réalise cette action moi-même, je ne peux voir moi-même les conséquences de ma propre action, il s'agit alors uniquement d'un ressenti. Comment pouvons-nous alors déterminer –via l’observation des gestes d’autrui– quel(s) muscle(s) nous devons activer pour réaliser la même action ? Le problème de la correspondance peut donc être formulé ainsi : comment sommes-nous capables de transformer la représentation visuelle de l’action en un output moteur correspondant ?
1.2. Réponses aux problèmes de la correspondance
1.2.1. Le modèle AIM (Active Intermodal Mapping)La présence de l’imitation d’expressions faciales dès les premiers jours de la vie chez le nouveau-né, que nous avons évoquée plus haut, interroge grandement la communauté scientifique. Comment les nouveau-nés peuvent-ils parvenir à faire correspondre leur action à l’action observée sans avoir vu eux-mêmes leur propre visage ? Comment sont-ils capables de déterminer les muscles à activer pour imiter l’expression faciale observée ?
Selon l’hypothèse AIM (Active Intermodal Mapping) proposée par Meltzoff et Moore (1997), l’imitation précoce des expressions faciales reposerait sur un espace représentationnel commun entre perception et action (Figure 2). La nature active de ce processus résiderait dans une boucle de feedback proprioceptif. Selon les auteurs, le nouveau-né serait tout d’abord capable de détecter la partie corporelle nécessaire à l’action (organ identification). Meltzoff et Moore (1997) démontrent que par exemple, lorsque le
15 d’abord « isoler » la partie corporelle impliquée dans l’action (en bougeant sa langue dans sa bouche, ou en serrant les lèvres par exemple), i.e. déterminer quelle partie du corps
bouger avant de déterminer comment effectuer le mouvement. L’identification de l’organe impliqué dans le mouvement serait, selon les auteurs, la première étape dans la génération de la réponse imitative. Se pose ici le problème de la correspondance. L’effecteur ayant été déterminé par le nouveau-né, comment peut-il alors déterminer quel muscle est nécessaire à l’exécution du mouvement ? Le modèle AIM propose que la sélection du mouvement approprié reposerait sur une phase d’apprentissage : le « babillage corporel » (body babbling). L’enfant bougerait alors l’effecteur identifié afin de déterminer le mouvement juste à effectuer. Un second processus (organ relation) permet ensuite au nouveau-né de
décomposer l’action en une série de relations entre les différentes parties du corps. Le modèle postule que ces relations constituent ainsi une représentation amodale de l’action, permettant à l’enfant de comparer les relations entre ses propres organes et les relations entre ceux des autres. Ce processus permet donc à l’enfant une comparaison de ses propres mouvements avec les mouvements des autres qui sont visuellement perçus (Meltzoff, 1990, 2005 ; Meltzoff & Moore, 1997). Une expression faciale observée, mais non ressentie, peut dès lors être associée à l’expression faciale ressentie mais non visible par l’enfant.
Selon le modèle AIM, l’imitation est basée sur la capacité à se représenter les informations visuelles et proprioceptives concernant l’action en une forme commune à ces deux modalités. Nous ferions appel à une représentation « supramodale » du geste observé afin de construire ensuite l’action correspondante. Cette idée est également centrale dans la théorie idéomotrice (Elsner & Hommel, 2001 ; Greenwald, 1970 ; Prinz, 2005) et dans son extension qu’est la « Théorie du codage des évènements » (Theory of Event Coding ou TEC) développée par Hommel et al. (2001). Ces approches partagent l’idée d’une
16 représentation commune entre les évènements, actions, perçus et les actions réalisées (ou désirées).
Figure 2. Active Intermodal Mapping (AIM).Représentation schématique du mécanisme
d’imitation des expressions faciales chez le nouveau-né, basé sur une représentation
supramodale des actions perçues et exécutées. D’après Meltzoff et Moore, 1997.
Avant d’aborder la théorie idéomotrice, nous allons d’abord présenter un modèle offrant une autre solution au problème de la correspondance : le modèle ASL.
1.2.2. Le modèle ASL (Associative Sequence Learning)
Une hypothèse alternative postule qu’il n’existe pas de format représentationnel commun entre action et perception et que les liens perception-action se construisent au cours du développement à travers l’expérience sensorimotrice (Heyes, 2001, 2005, 2010 ; Heyes & Bird, 2007). Lors de la réalisation d’une action, nous faisons l’expérience simultanée de l’observation et de l’exécution du mouvement. Selon le modèle ASL
17 (Associative Sequence Learning), la répétition d’expériences perceptives corrélées aux
expériences motrices conduit au développement d’associations entre la représentation perceptive de l’action et sa représentation motrice (Catmur, Walsh, & Heyes, 2007, 2009 ; Cook, Bird, Catmur, Press, & Heyes, 2014 ; Heyes, 2001, 2005, 2010). Quand une action est perçue, l’existence d’un tel lien permettrait alors l’activation de la représentation motrice de cette action, à partir de l’activation de sa représentation visuelle. Cette théorie associative est donc une alternative à l’idée d’un codage commun pour répondre au problème de la correspondance dans l’imitation et place l’expérience au cœur du développement des liens perception-action (Heyes, 2005).
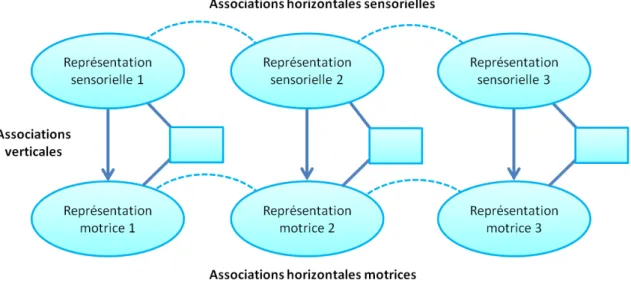
Selon ce modèle, le développement de l'imitation serait hautement dépendant de l'expérience. Des associations bidirectionnelles seraient créées entre les représentations sensorielles et les représentations motrices du mouvement (Figure 3). Ainsi, bien qu'une partie d'entre elles pourrait être innée (e.g. le bâillement, le sourire, la protrusion de la langue), la majorité de ce type d’associations entre représentation visuelle et représentation motrice reposerait sur l'expérience de l'individu (Heyes, 2001). La création de ces associations dites « verticales » s’appuie sur des principes issus du modèle Hebbien (Hebb, 1949 ; Keysers & Perrett, 2004). Selon ce modèle, la stimulation synchrone de deux neurones permettrait d'augmenter le poids de leurs connexions synaptiques de telle sorte que l'activité de l'un de ces neurones engendrerait de manière automatique l'activation de l'autre. Toutefois, au-delà de la contigüité temporelle nécessaire entre action observée et action exécutée propre au modèle Hebbien, selon le modèle ASL un certain degré de contingence serait également indispensable. Autrement dit, une relation prédictive entre le stimulus et la réponse doit être établie (Catmur, 2011). Ainsi, l’observation et l’exécution simultanée d’une même action mènerait à la création d’associations verticales directes. Ces
18 associations seraient formées au cours du développement via des processus d’apprentissage associatif (Schultz & Dickinson, 2000).
Figure 3. Associations verticales et horizontales, selon le modèle ASL. D’après Heyes, 2005.
Selon le modèle ASL, il existerait également des associations indirectes permettant à l’activation des représentations sensorielles de se propager aux représentations motrices via une autre représentation (représentées par les carrés dans la Figure 3). Le son de l’action par exemple pourrait ainsi activer simultanément les représentations visuelles et les représentations motrices d’une même action (Heyes, 2005). Il est à noter également l’existence d’un autre type d’associations dites « horizontales ». L’élaboration d’un nouveau mouvement reposerait sur la mise en relation de plusieurs éléments familiers, qui sont arrangés dans une nouvelle séquence (Figure 3). Ces liaisons horizontales entre les différentes représentations motrices correspondent à l’apprentissage moteur par observation.
Ce modèle suggère que, aussi bien pour les actions « opaques » que « transparentes », l’imitation est rendue possible par des associations verticales entre
19 l’aspect sensoriel du mouvement et sa représentation motrice (associations construites via un apprentissage de type associatif). D’autre part, Heyes (2005) avance l’idée selon laquelle l’imitation d’actions opaques peut reposer sur l’expérience de l’individu, sur des capacités innées, mais aussi sur la présence de miroirs optiques, ainsi que de surfaces réflexives dans l’environnement, permettant à l’individu de pouvoir observer ses propres mouvements d’une tierce perspective. De plus, durant le développement, nous sommes très tôt entourés d’individus qui nous imitent (par exemple, lorsqu’un bébé sourit, nous sourions) (Field et al., 1985, cités par Heyes, 2005). Ces divers moyens permettent ainsi la création d’associations verticales correspondantes entre l’observation d’une action A et son exécution. En effet, nous sommes plus souvent amenés à associer l’observation d’un mouvement A à l’exécution d’un mouvement A plutôt qu’à l’exécution d’un mouvement B. Si l’on reprend l’exemple précédent, nous sourions à un bébé qui sourit, en revanche, nous faisons rarement la grimace face à un bébé qui sourit (ce qui dans ce cas favoriserait la création d’associations verticales non-correspondantes ; Heyes, 2005).
En résumé, selon la théorie proposée par Heyes (2005, 2010, 2011), la réponse au problème de correspondance reposerait sur des associations à long terme qui seraient créées à travers l’expérience de l’individu, de telle sorte que l'activation d'une représentation sensorielle de l’action entraine l'activation subséquente de la représentation motrice associée. Toutefois, certaines associations seraient innées, permettant ainsi d'expliquer la capacité d'imitation présente chez le nouveau-né (Meltzoff & Moore, 1977).
1.2.3. La théorie idéomotrice
Selon la théorie idéomotrice, les actions seraient représentées en termes de leurs effets perceptifs. Cette théorie trouve ses origines dans deux courants principaux. D’une part les philosophes Allemands (Lotze, Hebart) et d’autre part les psychologues Anglais
20 (Carpenter, Laycock) (cf. Stock & Stock, 2004). Ces deux courants partagent une idée commune : l’existence d’un lien étroit entre les images que nous formons des actions et les actions elles-mêmes (pour revue, voir Shin et al., 2010). En 1890, le célèbre psychologue et philosophe américain William James publiera ses fameux « Principes de psychologie », œuvre dans laquelle il consacre une partie à développer la théorie idéomotrice. Selon James, « Toute représentation d’un mouvement active dans une certaine mesure le mouvement réel qui est son objet ». Toutefois, face au behaviorisme ce type de conception passera en arrière-plan pendant de nombreuses années. Ce sera Greenwald (1970), puis Prinz (1987) qui reprendront les premiers cette ligne de recherche, avant d’inspirer bon nombre de scientifiques.
L’idée générale de l’approche idéomotrice est que le contrôle de l’action est réalisé à partir d’une représentation anticipée des feedbacks sensoriels de l’action (i.e. une sorte « d’image de la réponse ») (Elsner & Hommel, 2001 ; Greenwald, 1970). Ceci permettrait d’une part de prédire les conséquences d’une action, et d’autre part, l’anticipation de l’effet de l’action pourrait servir de signal mental à l’activation du mouvement correspondant (Koch et al., 2004). Ainsi, le mouvement serait déclenché via l’anticipation des effets de ce mouvement, effets qui auraient été précédemment associés à cette action durant son exécution antérieure (Brass & Muhle-Karbe, 2014 ; Herbort & Butz, 2012). La théorie idéomotrice est donc principalement centrée sur l’intention et l’initiation du mouvement.
Dans ce cadre où l’action serait codée d’abord en termes d’effets perceptifs, l’action perçue et l’action exécutée partageraient donc un format représentationnel commun. Un aspect essentiel de la théorie réside dans l’existence d’associations bidirectionnelles entre l’action et ses effets perceptifs. Ces associations action-effet (ou réponse-effet) seraient le fruit de notre expérience. Lorsque nous réalisons une action, nous
21 apprenons les effets de cette action et il se crée de cette façon un « répertoire » d’associations action-effet. Il est à noter que selon cette théorie, ce répertoire concerne des effets correspondant à la fois à des informations corporelles liées directement au mouvement (i.e. les feedbacks proprioceptifs, visuels, auditifs sur le mouvement lui-même), mais aussi des informations plus distales liées aux conséquences de l’action sur l’environnement (Hommel et al., 2001 ; Pfister, Janczyk, Gressmann, Fournier, & Kunde, 2014a).
Selon la théorie idéomotrice, les actions seraient donc représentées sous forme « d’images » des feedbacks sensoriels qu’elles entrainent et ces représentations seraient utilisées pour initier et contrôler les mouvements désirés (Brass & Heyes, 2005 ; Prinz, 2005). Mais un point crucial de la théorie est que toute activation d’une représentation sensorielle de l’action va se traduire par une évocation de l’exécution de l’action représentée (James, 1890 ; Prinz, 2005). Cette activation peut être liée à une intention d’exécuter l’action, mais peut aussi avoir pour origine la perception de l’action d’autrui. La perception de l’action d’autrui va impliquer en effet une représentation sensorielle correspondant à celle produite lors de la réalisation de nos propres mouvements (i.e. correspondant à leurs effets perceptifs). Observer autrui réaliser une action engendrerait ainsi une activation de la représentation motrice de l’action chez l’observateur. Une conséquence est donc qu’observer une action exécutée par un autre individu devrait se traduire par une tendance à exécuter cette action.
Des démonstrations de ce phénomène ont été apportées à de nombreuses reprises. Par exemple, Chartrand et Bargh (1999) ont montré que des individus exposés de façon répétée à un comportement, tendent à reproduire de manière automatique, inconsciente, le comportement observé. De tels types de comportements ont déjà été mis en évidence dans des travaux antérieurs (e.g. Hull, 1933, cité par Ginsberg (2012) : observer une autre
22 personne tombant en avant mène à une tendance comportementale similaire chez l’observateur ; La France (1982) : les étudiants tendent à imiter de manière inconsciente la posture de leur enseignant). Ces constatations suggèrent ainsi que l’action observée se retrouve dans le comportement du sujet observateur. Nous reviendrons sur ces comportements plus en détails dans la section 1.4.
Des travaux ont également mis en évidence le fait que des réponses imitatives (reproduire l’action perçue) sont plus rapides que ces mêmes réponses initiées en réponse à un indice spatial (Brass, Bekkering, Wohlschläger, & Prinz, 2000). Dans cette étude, les participants devaient réaliser un mouvement de doigt le plus rapidement possible en réponse à un mouvement de doigt similaire, ou bien à un indice spatial affiché à l’écran, situé sur le doigt cible. Les auteurs ont observé que les participants répondaient plus rapidement au mouvement de doigt qu’à l’indice spatial (273 ms vs. 364 ms, respectivement), indiquant un effet d'amorçage du mouvement observé sur l'exécution du mouvement. L’initiation d’une action est donc favorisée par l’observation d’un stimulus compatible d’un point de vue idéomoteur. Ces effets sont en accord avec la théorie idéomotrice qui prédit que percevoir un mouvement (donc les effets perceptifs d’une action) se traduit par l’activation des codes moteurs correspondant à l’exécution de ce mouvement.
L’apprentissage idéomoteur
Une autre hypothèse principale de la théorie idéomotrice est que les associations entre les effets perceptifs et les codes moteurs de l’action sont construites à travers l’expérience : nous apprenons à associer nos actions à leurs effets.
Selon Herwig et Waszack (2012), l’apprentissage idéomoteur correspond à « l’acquisition spontanée d’associations de type action-effet, dans des actions d’origine
23 intentionnelle ou basées sur un stimulus » (p. 1-2). Elsner et Hommel (2001) ont développé un protocole expérimental permettant de mesurer l’effet d’un apprentissage idéomoteur. Les participants réalisaient tout d’abord une phase d’acquisition : ils avaient à disposition deux clés de réponse, et à l’apparition d’un rectangle blanc, ils devaient appuyer le plus rapidement possible sur un des deux boutons de réponse, sélectionné librement. Chaque réponse engendrait un son particulier (par exemple la réponse gauche déclenchait un son aigu, et la réponse droite un son grave). Les participants ignoraient qu’il s’agissait d’une phase d’apprentissage ; de plus, les consignes indiquaient que les sons n’avaient pas de lien avec la tâche et pouvaient être ignorés. Après avoir réalisé une série de 200 essais, les mêmes sons étaient présentés en tant que stimulus impératif dans une tâche subséquente de Temps de Réaction (TR) de choix. Les résultats obtenus montrent que les participants répondaient plus rapidement au son lorsqu’ils devaient produire la réponse qui, dans la phase d’acquisition précédente était suivie de ce son, que lorsqu’ils devaient produire une réponse face à un stimulus qui ne correspondait pas à l’effet de cette action. Si nous reprenons l’exemple précédent, lorsque les participants entendaient un son aigu lors de la tâche de TR, ils étaient plus rapides pour effectuer une réponse ‘gauche’ (réponse qui entrainait, dans la phase d’acquisition précédente, l’audition d’un son aigu) que pour effectuer une réponse ‘droite’ (réponse qui entrainait précédemment l’audition d’un son grave). Ces résultats suggèrent que durant la phase d’acquisition, les participants ont acquis de nouvelles associations bidirectionnelles entre le code moteur de l’action et le code perceptif de l’effet auditif (i.e. association action-effet). Ensuite, la perception des effets associés à l’action activent cette action.
Pour résumer, les différentes théories que nous venons d’aborder semblent apporter diverses réponses au problème de la correspondance. Comme souligné par Heyes (2009), bien que différentes, les théories proposées s’accordent sur certains points : l'observation
24 d'une action engendrerait l'activation des mêmes structures nerveuses et représentationnelles (représentation supramodale, associations sensorimotrices) impliquées dans l'exécution de l'action. D'autre part, ces activations auraient lieu non seulement lorsque l'individu souhaite imiter une action, mais également lorsqu'il observe passivement autrui agir.
Une découverte majeure des années 1990, la découverte des neurones miroirs, semble confirmer l’existence de ce recouvrement entre représentation sensorielle et représentation motrice au niveau cérébral.
1.3. Le système des neurones miroirs
Au niveau neurophysiologique, la découverte des neurones miroirs semble apporter la preuve qu’observation et exécution d’une action partagent une représentation cérébrale commune (Di Pellegrino et al., 1992). Ces neurones, désormais célèbres, ont été découverts en premier lieu dans le cortex ventral pré-moteur du singe macaque grâce à une technique d’enregistrement des réponses unicellulaires (Di Pellegrino et al., 1992). Plus précisément, ils ont été situés dans l’aire pré-motrice ventrale F5 (aire homologue à l’aire de Broca chez l’homme) (Di Pellegrino et al., 1992), ainsi que dans le lobe pariétal inférieur (Gallese, Fadiga, Fogassi, & Rizzolatti, 2002) du singe. Ces régions sont connues initialement pour être impliquées dans la programmation et la planification des mouvements volontaires. Les neurones miroirs découverts dans ces zones motrices du cerveau ont pour propriétés caractéristiques de s’activer lorsque le singe réalise une action, mais également lorsqu’il observe cette même action réalisée par autrui (Figure 4). L’action observée semble alors être reflétée, comme dans un miroir, dans le cerveau de l’observateur.
25 Figure 4. Illustration de l’activité d’un neurone miroir.
A = Activité d’un neurone dans l’aire F5 durant l’exécution de l’action (saisie d’un objet). B = Activité de ce même neurone durant l’observation de la même
action. Source : Rizzolatti, Fabbri-Destro, & Cattaneo, 2009.
Une étude conduite par Rizzolatti, Fogassi, et Gallese (2001) montre par ailleurs que lorsque le singe observe une action intransitive, il n’y a pas d’activation des neurones miroirs. Autrement dit, chez le singe, les neurones miroirs ne déchargent pas si le mouvement est réalisé en l’absence de but, s’il n’est pas dirigé vers une cible. Ainsi, la vision seule de l’objet, ou d’un acteur mimant une action intransitive ne suffit pas à déclencher l’activité de ces neurones (Rizzolatti & Craighero, 2004 ; Rizzolatti et al., 2001, 2009). Cela suggère que la décharge n’est pas liée uniquement à des déplacements de parties du corps, mais au codage du but de l’action motrice observée ou exécutée.
Dans ces mêmes régions cérébrales, il a également été découvert une autre classe de neurones visuo-moteurs : les neurones visuo-moteurs « canoniques ». Ceux-ci s’activent à la simple vue d’un objet et des affordances que celui-ci propose (Rizzolatti & Arbib, 1998), comme si le cerveau anticipait une interaction possible avec cet objet, et se préparait en conséquence.
Les techniques d’enregistrement des réponses unicellulaires utilisées pour révéler la présence de neurones ayant des propriétés miroirs chez le macaque ne peuvent, de par leur caractère invasif, être totalement transférables à l’homme. Des études utilisant des