Utilisation actuelle et potentielle des exosquelettes des
membres inférieurs pour la marche
Mémoire
Véronique Lajeunesse
Maîtrise en médecine expérimentale
Maître ès sciences (M.Sc.)
Québec, Canada
iii
Résumé
Le but général de ce mémoire consiste à documenter l’utilisation actuelle et potentielle (utilisabilité) des exosquelettes des membres inférieurs pour la marche. Deux volets sont présentés afin de répondre à ce but : 1) une revue systématique portant sur les exosquelettes des membres inférieurs utilisés pour la mobilité fonctionnelle chez les personnes ayant une lésion de la moelle épinière et 2) une étude exploratoire portant sur l’utilisabilité des exosquelettes des membres inférieurs : les perspectives des personnes ayant une lésion incomplète de la moelle épinière. Les résultats des sept études recensées démontrent qu’en tant qu’aide technique, l’applicabilité et l’efficacité des exosquelettes des membres inférieurs dans la communauté restent à démontrer. Les résultats obtenus auprès de 13 personnes ayant une lésion de la moelle épinière interviewées à leur domicile révèlent un écart important entre les attentes des participants en termes de versatilité d’utilisation et de convivialité des caractéristiques techniques par rapport aux exosquelettes actuellement disponibles sur le marché.
v
Table des matières
Résumé ... iii
Table des matières ... v
Liste des tableaux ... ix
Liste des figures ... xi
Liste des abréviations et des sigles ... xiii
Remerciements ... xvii
Avant-propos ... xix
Chapitre 1 Introduction ... 1
1.1 Problématique ... 1
1.1.1 Les exosquelettes ... 4
1.2 But et objectifs de l’étude ... 8
Chapitre 2 Article 1 ... 13
Systematic review of lower limb exoskeletons used for functional mobility by people with spinal cord injury ... 13
2.1 Résumé ... 14 2.2 Abstract ... 15 2.3 Introduction ... 16 2.4 Method ... 18 2.4.1 Selection process ... 18 2.4.2 Data extraction ... 20 2.4.3 Data analysis ... 20 2.5 Results ... 21
2.5.1 Characteristics of exoskeletons and training protocols (objective 1) ... 22
2.5.2 Functional mobility outcomes (objective 2) ... 28
2.5.3 Secondary skills and benefices, user satisfaction and safety (objective 3) ... 33
2.5.4 Levels of evidence (objective 4) ... 34
2.6 Discussion ... 34
2.6.1 Strengths and limitations of the study ... 36
2.6.2 Future research and recommendations for clinicians ... 37
Chapitre 3 Article 2 ... 39
Les perspectives des personnes ayant une lésion incomplète de la moelle épinière quant à l’utilisabilité des exosquelettes des membres inférieurs : une étude exploratoire. ... 39
3.1 Résumé ... 40 3.2 Abstract ... 42 3.3 Introduction ... 43 3.4 Cadre conceptuel ... 45 3.5 Méthodologie... 47 3.5.1 Devis ... 47 3.5.2 Participants ... 47 3.5.3 Entrevue ... 47
3.5.4 Test de déplacement et variables sociodémographiques ... 49
3.5.5 Analyse ... 50
3.6 Résultats ... 50
3.6.1 Profil des participants ... 50
3.6.2 Perceptions des différentes situations d’utilisation potentielles effectuées par les exosquelettes des membres inférieurs ... 53
3.6.3 Aptitudes pouvant être compensées et/ou améliorées par l’utilisation potentielle d’un exosquelette ... 55
3.6.4 Habitudes de vie à réaliser et/ou améliorer par l’utilisation potentielle d’un exosquelette ... 56
3.6.5 Caractéristiques environnementales attendues d’un exosquelette des membres inférieurs ... 62
3.7 Discussion ... 68
3.8 Conclusion ... 72
3.9 Appendice 1. Définitions des thèmes ... 74
Chapitre 4 Discussion générale et conclusions ... 79
4.1 Atteinte du but général et réponses aux objectifs de recherche ... 79
4.1.2 La revue systématique (article 1) ... 80
4.1.3 L’étude exploratoire (article 2) ... 82
4.1.4 Liens avec les cadres conceptuels ... 85
4.2 Forces et limites de l’étude ... 86
4.3 Recherches futures ... 87
4.4 Conclusions générales ... 88
Références ... 89
vii Annexe B. Test Timed Up and Go (TUG) ... 107 Annexe C. Feuillet de présentation du projet de recherche par téléphone... 110 Annexe D. Critical Review Form – Quantitative Studies ... 112
ix
Liste des tableaux
Tableau 1. Main characteristics of the selected studies, presented by alphabetical order of first author's name ... 24 Tableau 2. Main outcomes identified in exoskeleton studies, presented in order of study quality ... 29 Tableau 3. Profil des participants (n=13) ... 52 Tableau 4. Sommaire des perceptions des participants à la suite des vidéos présentant des
situations d’utilisation potentielles effectuées par trois exosquelettes... 55 Tableau 5. Aptitudes pouvant être compensées et/ou améliorées par l’utilisation potentielle d’un
exosquelette ... 57 Tableau 6. Habitudes de vie à réaliser et/ou améliorer avec l’utilisation potentielle d’un
exosquelette ... 59 Tableau 7. Caractéristiques idéales d’un exosquelette en vue de son utilisation potentielle ... 63
xi
Liste des figures
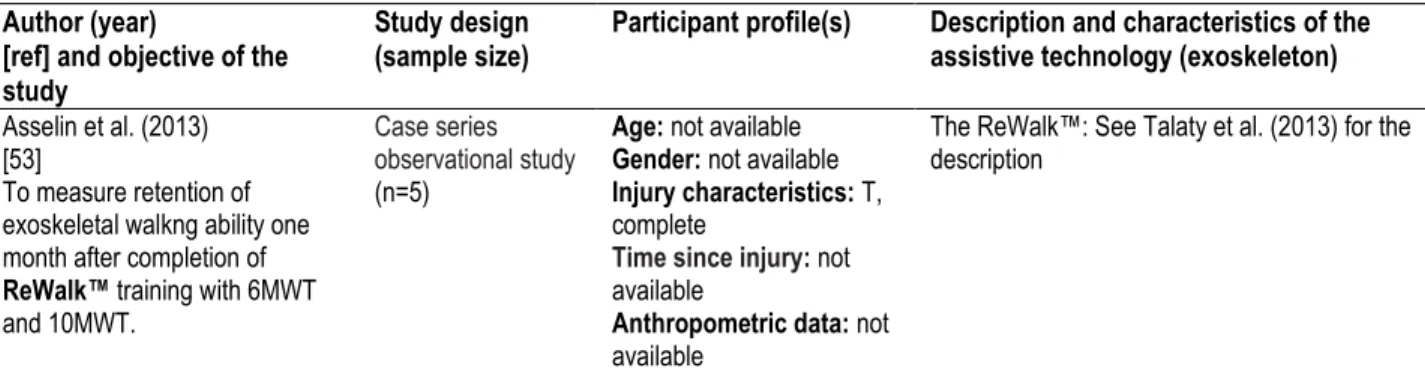
Figure 1. Échelle de classification de l’American Spinal Cord Injury Association (ASIA) [10] ... 2
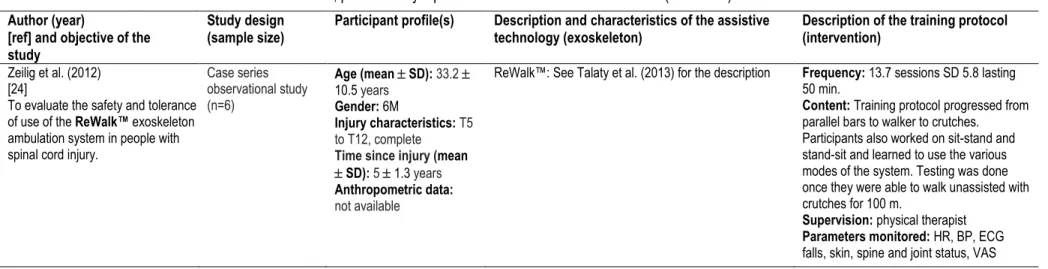
Figure 2. Le ReWalkTM [42], le Indego® [43] et le Mina [44] ... 6
Figure 3. Le HAL® [45], le Rex® [46] et le Ekso™ [47] ... 6
Figure 4. Le Keeogo™ [37], le ARKE™ [38] et le Wandercraft [39] ... 7
Figure 5. Le HULC® [48] et le XOS 2 [49] ... 7
Figure 6. Flow of information through the different phases of the systematic review of lower limb exoskeletons used for functional mobility by people with SCI (based on ‘Preferred Reporting Items for Systematic reviews and Meta-Analyses – The PRISMA Statement [67]) ... 19
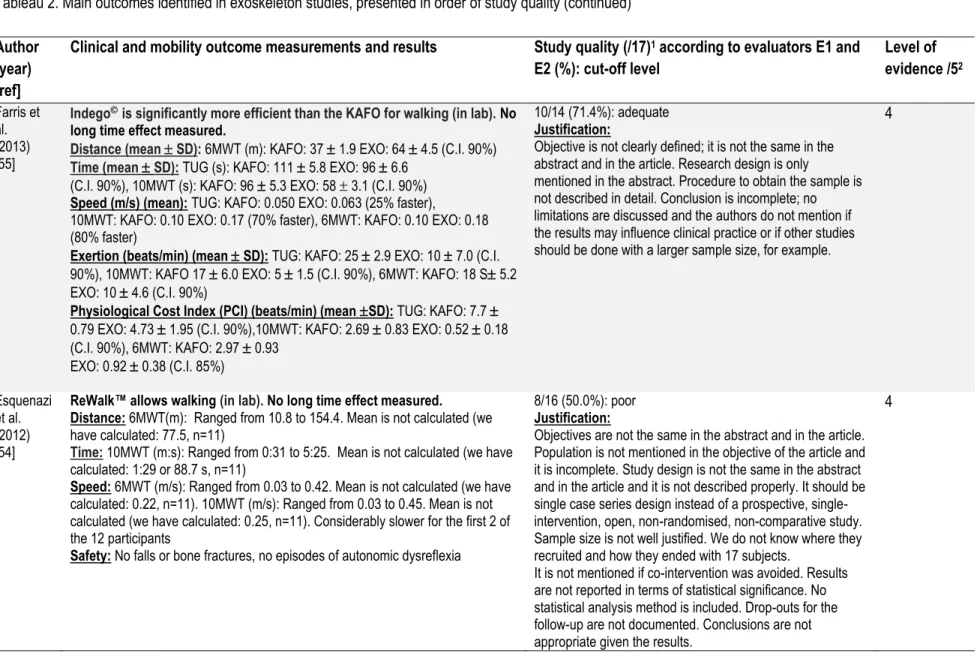
Figure 7. Cadre conceptuel adapté du PPH [84] et du QUEST [89]. ... 46
xiii
Liste des abréviations et des sigles
AIS American Spinal Injury Association Impairment Scale ASIA American Spinal Injury AssociationAT Aide technique BP Blood pressure
ECG Electrocardiogram
EMG Electromyogram
ÉSAT Évaluation de la satisfaction envers une aide technique FDA Food and Drug Administration
HR Heart rate
HAAT Human Activity Assistive Technology ISO Organisation mondiale de la normalisation KAFOs Knee-ankle-foot orthoses
MDH-PPH Modèle de développement humain - Processus de production du handicap PPH Processus de production du handicap
QUEST Quebec User Evaluation of Satisfaction with assistive Technology
RPE Rating perceived exertion
R&D Recherche et développement SCI Spinal cord injury
TUG Timed Up and Go Test VAS Visual analogue scale 6MWT Six-Minute Walk Test 10MWT Ten-Meter Walk Test
xv
xvii
Remerciements
C’est avec la plus grande fierté (et un énorme soulagement!) que je finalise un chapitre de ma vie rempli d’efforts, d’émotions et de persévérance : celui de ma maîtrise. Cette réussite ne serait jamais arrivée sans le soutien, de près ou de loin, de nombreuses personnes. Tout d’abord, je tiens à remercier ma directrice de recherche, Claude Vincent, qui a su m’accompagner dans tout ce cheminement, qu’il soit académique ou personnel. Ma chère Claude, merci de ton soutien, de tes encouragements, de ta disponibilité et de ton efficacité à corriger mes documents! J’ai toujours eu le sentiment que tu voulais m’aider et que tu croyais en moi. Je n’y serais jamais parvenue sans toi. Je voudrais également remercier mon co-directeur, François Routhier, qui a toujours été présent pour moi, dans mes coups d’élan d’écriture comme dans mes périodes de syndrome de la page blanche. Merci François d’avoir pris le temps de t’asseoir avec moi et de m’avoir donné le petit coup de pouce qu’il me manquait parfois. Tu as toujours su trouver des moments pour me rencontrer ou répondre à mes questions, malgré ton horaire très chargé! Un merci spécial à François Michaud et Emmanuelle Careau qui ont collaboré dans une certaine mesure à l’écriture de mes articles. Un grand merci également à Myriam Dupont, bibliothécaire-conseil pour la Faculté de médecine de l’Université Laval,
pour son assistance technique tout au long de mes rédactions. Merci aussi à Lise Vachon de l’organisme MEMO-Qc et au service des archives de l’IRDPQ de leur aide pour le recrutement des participants. Je tiens aussi à remercier tous les participants ayant accepté de m’avoir accueillie dans leur domicile dans le but de participer à mon projet d’étude.
Il n’est pas toujours facile pour notre entourage de comprendre ce qu’implique exactement le travail d’une maîtrise. En ce sens, j’aimerais remercier, du plus profond de mon cœur, toute ma famille pour leur soutien et leurs encouragements, en particulier mes parents, Ge, Alex et Wilson. Votre appui et votre compréhension ont été au-delà de mes espérances. Mom et papa, tout ce que j’ai accompli est grâce à vous deux. Vous m’avez donné la chance d’avoir eu toute cette éducation et c’est la plus grande richesse que je ne pourrai recevoir dans toute ma vie. Merci. Un grand merci à ma belle Mamie pour m’avoir préparé de délicieux repas lorsque je n’avais aucun temps pour cuisiner! Un merci spécial à ma talentueuse tante Christine qui m’a aidée pour toutes mes affiches et l’aspect visuel de mes travaux. Tu es la meilleure! Merci pour ton temps. Je tiens également à remercier ma belle-famille, Diane, Bruno, Popa Joe, Sonia, Mini chou, Vincent, Kate, Will et Manmie qui ont su m’encourager et me changer les idées avec de bons déjeuners, soupers et activités de toutes sortes!
Mon passage au CIRRIS n’aurait pas été le même sans la rencontre de gens extraordinaires avec lesquels j’ai partagé discussions, rires, dîners et congrès! Merci à Maya, Corinne, Stéph, Nadine, Anita, Jay, Amé, Alex, Lewis, Laurent, Michaël, Mathieu, Paméla et Sophie! Vous avez embelli à votre façon mes journées au CIRRIS! Merci également à tou(te)s mes ami(e)s qui n’ont cessé de m’encourager à terminer ce mémoire et qui ont compris mes indisponibilités. J’ai énormément de chance d’être si bien entourée.
Je tiens à souligner le soutien financier du regroupement Ingénierie de technologies interactives en réadaptation (INTER) et du CIRRIS, sans lequel il m’aurait été impossible de me consacrer à ce travail de recherche.
Finalement, je tiens à remercier tout spécialement Dave, mon copain, compagnon de vie et meilleur ami. Je sais que ce périple n’a pas toujours été facile, que JE n’ai pas toujours été facile, mais c’est en grande partie grâce à toi que je termine enfin ce mémoire de maîtrise. Dave, ta patience, ton aide et ta compréhension font preuve de ton amour pour moi. Merci mille fois mon amour, je t’aime et je suis privilégiée de t’avoir à mes côtés.
xix
Avant-propos
Ce mémoire est présenté avec insertion d’articles. Le premier chapitre présente l’introduction générale et les connaissances actuelles sur le sujet principal du mémoire. Le deuxième chapitre présente le premier article qui a été soumis en janvier 2015 à la revue Disability and Rehabilitation: Assistive Technology. Par la suite, le troisième chapitre présente le deuxième article qui sera traduit en anglais sous peu pour une éventuelle soumission à l’hiver 2016 à la revue Technology and Disability. Finalement, le dernier chapitre est une discussion sur les principaux résultats des deux articles et une conclusion générale.
Les deux articles ont été rédigés par Véronique Lajeunesse dans le cadre de son mémoire de maîtrise. Elle a participé activement à toutes les étapes menant à leur écriture, soit la collecte de données, l’analyse et l’écriture des articles. Pour le premier article intitulé : « Systematic review of lower limb exoskeletons used for functional mobility by people with spinal cord injury », Dre Claude Vincent, ergothérapeute, professeure titulaire au Département de réadaptation de la Faculté de médecine à l’Université Laval et chercheure au Centre interdisciplinaire de recherche en réadaptation et intégration sociale (CIRRIS) et Dr François Routhier, ingénieur, professeur adjoint au Département de réadaptation de la Faculté de médecine à l’Université Laval et chercheur au CIRRIS, ont participé à toutes les étapes du premier article. Les collaborateurs suivants ont commenté et révisé l’article : Dre Emmanuelle Careau, ergothérapeute, professeure adjointe au Département de réadaptation de la Faculté de médecine à l’Université Laval et chercheure au CIRRIS et Dr François Michaud, ingénieur, professeur titulaire au Département de génie électrique et de génie informatique de la Faculté de génie à l’Université de Sherbrooke et titulaire de la Chaire de recherche du Canada en robotique mobile et systèmes intelligents autonomes. Pour le deuxième article intitulé : « Les perspectives des personnes ayant une lésion incomplète de la moelle épinière quant à l’utilisabilité des exosquelettes des membres inférieurs : une étude exploratoire », les Drs François Routhier et Claude Vincent ont participé à toutes les étapes, alors que le Dr François Michaud a commenté et relu le manuscrit.
1
Chapitre 1 Introduction
Ce chapitre présente la problématique traitée dans ce mémoire, soit l’absence de connaissances sur l’utilisation et la performance actuelles des exosquelettes des membres inférieurs existants, ainsi que l’absence de connaissances sur les perceptions et l’utilisation attendue des exosquelettes chez les personnes présentant une lésion incomplète de la moelle épinière. Le but du mémoire et les objectifs spécifiques sont également indiqués dans ce présent chapitre.
1.1 Problématique
En 2014, le nombre de personnes vivant avec une blessure médullaire aux États-Unis était d’environ 276 000, avec approximativement 12 500 nouveaux cas recensés par année [1]. Selon une étude réalisée au Canada en 2010, la prévalence (nombre total de personnes vivant actuellement avec une lésion médullaire) était estimée à 86 000 personnes alors que l’incidence (nombre annuel de nouveaux cas) était d’environ 4 300 personnes [2, 3, 4] Les taux de prévalence et d’incidence tendent à augmenter avec les années, puisqu’il est estimé qu’il y aura 121 000 blessés médullaires en 2030 avec 5 800 nouveaux cas par année [3].
Une blessure médullaire survient lorsqu’un accident (comme une chute ou un accident de voiture) ou une maladie (comme une tumeur ou des complications suite à une chirurgie) endommagent la moelle épinière, résultant en une paralysie partielle ou complète [3]. Au Canada, environ 51% des blessures médullaires sont d’origine traumatique [1, 4]. Les accidents de voiture sont la cause de lésion de la moelle épinière la plus commune, suivie par les chutes, les actes de violence, les sports et autres étiologies [1, 5]. Près de 79% des blessés médullaires sont des hommes, soit quatre fois plus d’hommes que de femmes [1, 5]. L’âge moyen au moment de la lésion a augmenté au cours des dernières années, passant de 29 ans dans les années 1970 à 42 ans depuis 2010 [1, 5].
Dépendamment de la gravité de la lésion et de sa situation dans la moelle épinière, le degré de perte de sensibilité et de motricité peut varier [6]. Une lésion au niveau cervical (C1 à C8) entraîne une tétraplégie (ou quadriplégie), c’est-à-dire une diminution ou la perte des fonctions motrices et/ou sensorielles dans les bras, le tronc, les jambes et les organes pelviens [3, 7, 8]. Une lésion au niveau
thoracique (T1 à T12), lombaire (L1 à L5) ou sacré (S1 à S5) amène une paraplégie, qui réfère à une diminution ou à la perte des fonctions motrices et/ou sensorielles du tronc ou d’une partie du tronc, des jambes et des organes pelviens [3, 7, 8]. Une lésion peut également être complète (absence de fonction sensorielle et motrice au plus bas segment sacré (S4-S5)) ou incomplète (présence de fonction sensorielle et/ou motrice sous le niveau neurologique qui inclut le plus bas segment sacré) [7, 8]. Les blessures médullaires les plus fréquentes sont les tétraplégies incomplètes (45%), suivies des paraplégies incomplètes (21%), des paraplégies complètes (20%) et des tétraplégies complètes (14%) [1]. Finalement, l’échelle de classification ASIA (American Spinal Cord Injury Association) est une approche multidimensionnelle catégorisant le handicap aux niveaux sensitif et moteur chez les individus présentant une lésion de la moelle épinière (voir figure 1) [2, 3, 9].
Au cours des dernières décennies, les concepts et les perceptions de l’incapacité ont beaucoup évolué. Le modèle médical a longtemps établi qu’une incapacité était la conséquence d’une déficience de la personne [11, 12]. Aujourd’hui, le Modèle de développement humain - Processus de production du handicap (MDH-PPH) propose plutôt l’existence d’une interaction entre les facteurs personnels (les déficiences, incapacités et autres caractéristiques personnelles), les facteurs environnementaux (les facilitateurs et obstacles physiques et sociaux) et les habitudes de vie (participation sociale versus situation de handicap) d’un individu [13]. En 2010, entre 14% et 19% de la population nord-américaine vivait avec une incapacité [14, 15]. Près de 54% des personnes qui
3 vivent avec une incapacité aux États-Unis ont une incapacité reliée à la mobilité, soit 30,6 millions de personnes [14]. Les personnes vivant avec une lésion médullaire font partie de ce groupe.
Au Québec, les aides techniques sont considérées comme des facteurs environnementaux, prenant généralement la forme d’appareils, visant à corriger une déficience, à compenser une incapacité, à prévenir ou à réduire une situation de handicap [16, 17]. Telle que définie dans le US Code, une aide technique (assistive technology device) correspond à tout article, équipement ou système technique acquis commercialement, modifié ou personnalisé, qui est utilisé pour augmenter, maintenir ou améliorer les capacités fonctionnelles des individus avec des incapacités (traduite de l’anglais provenant de [18]. Il est important ici de nuancer les deux définitions. En effet, la définition québécoise contient les termes « compenser une incapacité » qui ne se retrouvent pas dans la définition américaine. Compenser doit être interprété ici comme « dédommager d'une perte par un avantage considéré comme équivalent » [19]. De plus, dans la définition québécoise, il y a l’idée de réduire une situation de handicap, ce qui implique le souhait d’améliorer la réalisation des habitudes de vie des personnes [20]. Puisque la définition québécoise est plus complète et d’actualité (se basant sur le MDH-PPH), elle prévaudra lorsqu’il sera question d’aide technique tout au long de ce mémoire. Les aides techniques jouent un rôle primordial dans la réalisation des habitudes de vie des personnes ayant des incapacités. Plus précisément, les aides techniques à la mobilité (ex. canne, cadre de marche, fauteuil roulant manuel, fauteuil électrique, béquilles, déambulateur, quadriporteur) visent à faciliter ou à permettre les déplacements individuels [16]. Selon l’Institut de la statistique du Québec en 2006, les aides à la mobilité se situent au premier rang des aides techniques les plus utilisées chez une population de 15 ans et plus avec incapacité, c’est-à-dire que sur un total d’environ 370 000 utilisateurs d’aides techniques, plus de la moitié (55%) utiliseraient des aides à la mobilité [21]. Bien que leur utilisation semble élevée comparativement aux autres aides techniques (telles que les aides techniques liées à l’audition, à la vision, à la parole, à l’agilité, à l’apprentissage et autres aides techniques), les aides à la mobilité tendent à être les plus souvent abandonnées [22]. Les principaux facteurs significatifs de ces abandons seraient, entre autres, le niveau faible de performance de l’appareil et l’opinion personnelle non considérée dans la sélection des aides [22]. Afin de pallier ces deux dernières difficultés, le développement d’aides techniques à la mobilité plus efficaces et plus performantes, ainsi qu’une conception centrée sur l’usager feraient partie des bons moyens à envisager [23].
Différentes aides techniques à la mobilité (canne, cadre de marche, fauteuil roulant manuel, fauteuil électrique, béquilles, déambulateur, quadriporteur) peuvent aider les personnes atteintes d’une lésion de la moelle épinière à se déplacer selon leur niveau d’incapacités. Les personnes ayant une atteinte de grade ASIA A ou B présentent une absence complète des fonctions motrices et sont donc dépendantes d’un fauteuil roulant afin de se déplacer. Les personnes ayant une lésion de la moelle épinière de grade ASIA C ou D ont, quant à elles, encore une partie de leur activité musculaire et sensorielle aux membres inférieurs et peuvent utiliser d’autres aides techniques à la mobilité, telles que mentionnées précédemment. Cependant, ces différentes aides ne permettent pas toujours aux utilisateurs de réaliser toutes leurs activités de la vie quotidienne ou domestique, la pratique de sports ou la réalisation de sorties extérieures dans la communauté.
1.1.1 Les exosquelettes
Durant l’ère de la réadaptation moderne, de nombreuses techniques compensatoires ont été développées comme substituts des déficits neurologiques résiduels qui empêchent le retour à la marche, telles que des orthèses passives pour les hanches, genoux, chevilles ou pieds, la stimulation électrique fonctionnelle, les orthèses motorisées ou encore une combinaison de ces techniques [24]. Cependant, même si les critères pour utiliser l’une ou l’autre de ces techniques sont rencontrés, elles sont plus souvent utilisées pour des fins de recherche ou dans le cadre de traitements thérapeutiques en laboratoire, et non pour la marche fonctionnelle [24]. Vers la fin des années 1990, l’entraînement à la marche par assistance robotique a été introduit dans des centres de réadaptation et instituts de recherche afin d’améliorer ou rééduquer la marche fonctionnelle chez les usagers atteints de troubles neurologiques [25, 26]. Par la suite, un nombre croissant de nouveaux types de systèmes robotiques ou d’exosquelettes avec différentes fonctions de réadaptation ont été conçus [23, 27]. Les ingénieurs définissent un exosquelette comme un dispositif mécatronique à base fixe ou mobile composé d'une structure mécanique à plusieurs degrés de liberté, d'un système d'actionnement (électrique, hydraulique ou pneumatique) utilisant une source d'énergie embarquée ou déportée, et de cartes électroniques de puissance et de commande, que revêt un individu à la manière d'un vêtement robotisé ou d'une prothèse externe, pour lui permettre, entre autres, de démultiplier ses capacités physiques ou de rééduquer son système musculosquelettique [26]. Dans l’ensemble, les appareils robotiques de réadaptation peuvent être classés sous deux groupes : les robots immobiles et les robots de réadaptation sur le terrain [27]. Parmi les robots immobiles, on retrouve, entre autres, des appareils qui consistent à permettre à
5 l’usager de pratiquer un entraînement à la marche sur un tapis roulant, grâce à un exosquelette fixé aux jambes et un système de soutien du poids (body weight support) [27]. Ce type d’orthèse motorisée peut seulement être utilisé en centre de réadaptation ou en laboratoire. Par exemple, le premier système qui a été mis sur le marché, et le plus utilisé jusqu’à présent, est le LokomatTM [23,
25, 28, 29]. Le ALEX, le LOPES et le ReoAmbulator sont d’autres modèles faisant également partie de cette catégorie d’appareils robotiques [27, 29]. En ce qui a trait aux robots de réadaptation sur le terrain, ceux-ci sont conçus pour permettre aux usagers de marcher sur le sol et d’augmenter leur indépendance lors de l’entraînement à la marche [27]. Encore une fois, plusieurs types d’appareils robotisés font partie de cette catégorie, dont les exosquelettes «portables» [27]. Ceux-ci améliorent énormément la mobilité, puisque les utilisateurs ne sont pas confinés dans un espace limité ou restreints dans le plan sagittal pour leurs déplacements [27].
Avec l’avancement de la technologie dans le domaine de la robotique depuis les quinze dernières années, plusieurs entreprises privées ont tenté, et tentent toujours, de développer des exosquelettes motorisés des membres inférieurs utilisés comme aide technique chez les personnes paraplégiques. On retrouve aujourd’hui différents modèles commercialisés tels que le ReWalkTM [30], le Indego®
[31], le Mina [32], le HAL® [33], le Rex® [34], le Ekso™ [35], le Keeogo™ [36, 37], le ARKE™ [38] et le Wandercraft [39] (voir figures 2 à 5). Dans ce cas-ci, où un exosquelette est utilisé comme aide technique, il est plutôt défini comme étant une structure externe couvrant les parties du corps humain et ayant des joints mécaniques correspondant aux articulations humaines [29, 40]. C’est un appareil mécanique actif qui est essentiellement de nature anthropomorphique, qui est « porté » de façon ajustée sur l’utilisateur et qui fonctionne en concert avec les mouvements de ce dernier. L’exosquelette fournit directement la puissance mécanique pour l’utilisateur afin d’amplifier la force musculaire humaine [41].
Figure 2. Le ReWalkTM [42], le Indego® [43] et le Mina [44]
7 Figure 4. Le Keeogo™ [37], le ARKE™ [38] et le Wandercraft [39]
Malgré l’évolution récente de ces appareils, les premières recherches sur ce type d’exosquelettes ont débuté vers la fin des années 1960 dans le but d’augmenter les capacités et de démultiplier les forces des militaires [7, 29, 50, 51]. Autrement dit, les premiers prototypes ont été réalisés pour des soldats (sujets sains) pour réduire au minimum les forces perçues par ces utilisateurs et ainsi leur permettre d’effectuer des tâches telles que transporter une charge allant jusqu’à 90 kg sur leur dos lors d’une mission [52]. Les exosquelettes HULC® de Lockheed Martin et XOS 2 de Raytheon en sont deux exemples [48, 49]. Ce n’est que depuis le début des années 2000 que des études sur des exosquelettes thérapeutiques, de réadaptation ou de compensation fonctionnelle ont vu le jour [51]. Le présent mémoire portera uniquement sur ceux ayant le potentiel de pouvoir être utilisés dans la communauté de façon autonome par une personne ayant des incapacités physiques. Jusqu’à maintenant, dans la littérature scientifique, les exosquelettes développés avec un potentiel d’utilisation comme aides techniques dans la communauté sont plutôt destinés à des personnes ayant une absence complète des fonctions motrices, c’est-à-dire des individus ayant une lésion de la moelle épinière de grade ASIA A ou B [24, 32, 34-39, 53-58].
1.2 But et objectifs de l’étude
Malgré de nombreuses études et produits commercialisés sur ces exosquelettes, aucun ouvrage n’a été publié présentant l’utilisation et la performance actuelles dans la communauté, ainsi que l’utilisabilité de ces exosquelettes. Ces connaissances sont nécessaires pour les cliniciens dans les centres de réadaptation afin qu’ils puissent éventuellement prescrire/suggérer un modèle d’exosquelette personnalisé aux besoins de leurs patients. De plus, il n’existe pas encore de produit qui est adapté aux besoins des personnes qui peuvent tirer profit d’une partie de leur activité musculaire et sensorielle résiduelle aux membres inférieurs, comme les personnes ayant une lésion à la moelle épinière incomplète de grade ASIA C ou D. La conception d’un exosquelette pour cette population spécifique permettrait d’amplifier l’activité motrice résiduelle des muscles, sans toutefois exécuter 100% du travail afin d’éviter, notamment, l’atrophie musculaire. Cette nouvelle aide technique pourrait également permettre à ces personnes de réaliser des tâches qu’elles ne sont actuellement pas capables de faire avec leur aide à la mobilité actuelle (canne, cadre de marche, fauteuil roulant manuel, fauteuil électrique, béquilles, déambulateur, quadriporteur). Cependant, aucune étude ne s’est intéressée aux perceptions et attentes de ces usagers potentiels d’exosquelettes. On ne sait donc pas quelles caractéristiques devraient avoir cet éventuel exosquelette ni même ce que les utilisateurs souhaiteraient ou auraient besoin de réaliser comme
9 activités avec une telle aide technique à la mobilité. C’est pourquoi le concept de l’utilisabilité prend toute son importance dans le cadre de cette présente étude. Définie par l’Organisation mondiale de la normalisation (ISO), l’utilisabilité est le degré selon lequel un produit peut être utilisé, par des utilisateurs identifiés, pour atteindre des buts définis avec efficacité, efficience et satisfaction,
dans un contexte d’utilisation spécifié [59]. Plus souvent documentée sous le terme anglophone
usability, l’utilisabilité fait également référence à la facilité d’utilisation des produits et des systèmes et
de les faire correspondre plus étroitement aux besoins et exigences des utilisateurs (traduction de l’anglais provenant de [60]. Tel que mentionné précédemment dans la définition de l’ISO, l’utilisabilité consiste en l’efficacité (est-ce que les utilisateurs peuvent effectuer des tâches, atteindre des objectifs avec le produit?), l’efficience (combien d’efforts les utilisateurs ont besoin afin de réaliser les tâches/atteindre les objectifs) et la satisfaction (qu’est-ce que les utilisateurs pensent à propos de la facilité d’utilisation du produit?). Ces trois variables sont influencées par les utilisateurs, leurs objectifs et le contexte d’utilisation [60].
Afin de bien documenter l’utilisabilité et d’éviter que des produits soient abandonnés, une approche de conception centrée sur l’usager (user-centered design) est de mise pour les futurs exosquelettes qui seront développés pour des personnes ayant une lésion incomplète au niveau moteur (ASIA C ou D) de la moelle épinière. En effet, l’approche de conception centrée sur l’usager consiste à impliquer les usagers tout au long du processus afin que le produit corresponde aux exigences de ceux-ci et afin que l’utilisation de ce produit soit maximisée [61]. Ce processus de conception fourni des informations par rapport aux besoins, expériences et idées des futurs utilisateurs, en plus d’apporter une meilleure fonctionnalité, utilisabilité et qualité des appareils qui sont développés [62]. Ceci étant dit, il serait donc important de centrer le développement des futurs exosquelettes des membres inférieurs en parallèle aux besoins de la clientèle des blessés médullaires de grade ASIA C ou D. Afin de combler ce manque de connaissances, le but de ce mémoire consiste à documenter l’utilisation actuelle et potentielle (utilisabilité) des exosquelettes des membres inférieurs pour la marche. Six objectifs spécifiques sont proposés :
1. Décrire les caractéristiques des exosquelettes qui peuvent être utilisés comme aides techniques à la mobilité dans la communauté par des personnes ayant une paraplégie complète et leurs protocoles d’entraînement respectifs [à partir de la littérature scientifique];
2. Documenter les résultats de ces exosquelettes en termes de mobilité fonctionnelle, compétences secondaires et bénéfices accomplis avec ces exosquelettes, ainsi que les enjeux de sécurité, de satisfaction de l’usager et de leur applicabilité dans la communauté [à partir de la littérature scientifique];
3. Établir le niveau d’évidence scientifique des études scientifiques portant sur l’utilisation d’exosquelettes des membres inférieurs comme aide technique avec des résultats de mobilité fonctionnelle chez des participants ayant une lésion de la moelle épinière [à l’aide de grilles d’évaluation];
4. Présenter les perspectives des personnes ayant une lésion incomplète de la moelle épinière de grade ASIA C ou D à propos de l'utilisabilité des exosquelettes des membres inférieurs aux ingénieurs en recherche et développement (R&D) et cliniciens œuvrant dans le domaine de la réadaptation associé à la déficience motrice [à l’aide d’une étude empirique];
5. Dresser un portrait des perceptions des personnes ayant une lésion de la moelle épinière incomplète sur différentes situations d’utilisation potentielles effectuées par les exosquelettes [à l’aide d’une étude empirique];
6. Documenter l’utilisation attendue d’un exosquelette des membres inférieurs sur le plan des aptitudes et des habitudes de vie ainsi que les caractéristiques techniques attendues de ce même exosquelette par cette population [à l’aide d’une étude empirique].
Ce présent mémoire est divisé en quatre chapitres. Le chapitre 2 constitue un premier article intitulé « Systematic review of lower limb exoskeletons used for functional mobility by people with spinal cord injury »; celui-ci permet de répondre aux objectifs 1, 2, 3 du mémoire. Le chapitre 3 constitue un second article intitulé « Les perspectives des personnes ayant une lésion incomplète de la moelle épinière quant à l’utilisabilité des exosquelettes des membres inférieurs : une étude exploratoire »; ce dernier permet de répondre aux objectifs 4, 5 et 6 du mémoire. Puisque les aspects méthodologiques sont décrits dans chacun des articles, il n’y a pas de chapitre sur la méthodologie. Le chapitre 4 propose une discussion qui rapprochera les principaux résultats et constats des deux articles du mémoire aux connaissances présentées au chapitre 1 sur la problématique générale, ainsi que sur
11 les différents concepts intégrés dans cette étude, soit le processus de production du handicap (PPH), le Quebec User Evaluation of Satisfaction with assitive Technology (QUEST1), l’approche de
conception centrée sur l’usager et le concept de l’utilisabilité. Finalement, le chapitre 4 se terminera par une conclusion générale.
1 Évaluation de la satisfaction envers une aide technique (ÉSAT) correspond à l’appellation francophone du QUEST; dans le reste du mémoire, le vocable QUEST sera utilisé puisqu’il apparait ainsi le plus souvent dans la littérature scientifique anglophone.
13
Chapitre 2 Article 1
Systematic review of lower limb exoskeletons used for functional
mobility by people with spinal cord injury
2Véronique Lajeunesse1, Claude Vincent1,2, François Routhier1,2, Emmanuelle Careau1,2, François
Michaud3
1Centre for Interdisciplinary Research in Rehabilitation and Social Integration, Quebec, Canada
2Department of Rehabilitation, Université Laval, Quebec, Canada
3Interdisciplinary Institute for Technological Innovation (3IT), Interactive, Intelligent, Interdisciplinary
and Integrated Robotic Lab (IntRoLab), Department of Electrical Engineering and Computer Engineering, Université de Sherbrooke, Quebec, Canada
Correspondance: Claude Vincent, PhD, OT(c), Centre interdisciplinaire de recherche en réadaptation et intégration sociale, Institut de réadaptation en déficience physique de Québec, 525, boulevard Wilfrid-Hamel, Québec (Québec) G1M 2S8, Canada
Tel.: 418 529 9141 ext. 6626. E-mail: claude.vincent@rea.ulaval.ca Keywords:
powered exoskeleton, assistive technology, mobility device, paraplegia, lower extremities, thoracic level injury
2 Il s’agit ici de la première version soumise à la revue Disability and Rehabilitation: Assistive Technology. C’est une autre version qui a été publiée [86] à la suite de modifications substantielles, principalement dans l’introduction où les types d’exosquelettes et leurs particularités ont été distingués.
2.1 Résumé
Introduction : Les professionnels de la réadaptation ont peu d’information sur les exosquelettes des membres inférieurs pour les personnes paraplégiques.
Objectifs : 1) Décrire les caractéristiques des exosquelettes qui peuvent être utilisés comme aides techniques à la mobilité dans la communauté par des personnes ayant une paraplégie complète et leurs protocoles d’entraînement respectifs [à partir de la littérature scientifique]; 2) Documenter les résultats de ces exosquelettes en termes de mobilité fonctionnelle [à partir de la littérature scientifique]; 3) Documenter les compétences secondaires et bénéfices accomplis avec ces exosquelettes, sécurité, satisfaction de l’usager et applicabilité dans la communauté [à partir de la littérature scientifique] et 4) Établir le niveau d’évidence scientifique des études portant sur l’utilisation d’exosquelettes des membres inférieurs comme aide technique avec des résultats de mobilité fonctionnelle chez des participants ayant une lésion de la moelle épinière [à l’aide de grilles d’évaluation];
Méthodologie : Une revue systématique sur le sujet a été effectuée (janvier 2004 à avril 2014) à l’aide des bases de données PubMed, CINAHL, Embase et de groupes de mots-clés associés à « exoskeleton », « lower limb », et « paraplegia ».
Résultats : Sept articles ont été recensés. L’utilisation de l’exosquelette est efficace pour les déplacements à la marche en laboratoire mais aucun protocole d’entrainement n’a permis de modifier à long terme les résultats identifiés (3 mois pour le ReWalk™; 2 mois pour le Mina et 1 session pour le Indego). Les niveaux d’évidence scientifique des études sélectionnées sont faibles. Conclusions : En tant qu’aide technique, l’applicabilité et l’efficacité des exosquelettes des membres inférieurs dans la communauté restent à démontrer. Les cliniciens devraient demeurer à l’affût des recherches en cours sur la performance à la marche, surtout dans la communauté, avec ces exosquelettes par rapport à l’utilisation d’autres aides à la mobilité et dans d’autres contextes d’entraînement.
15
2.2 Abstract
Introduction: Rehabilitation professionals have little information concerning lower limb exoskeletons for people with paraplegia.
Objectives: 1) To describe the characteristics and training protocols of exoskeletons that could be used as assistive mobility devices in the community by individuals with complete low-level SCI; 2) to document functional mobility outcomes of using these exoskeletons; 3) to document secondary skills and benefices achieved with these exoskeletons, safety, user satisfaction and applicability in the community; and 4) to establish the level of scientific evidence of the studies, regarding the usability of lower limb exoskeletons as assistive devices and functional mobility outcomes with SCI participants. Method: A systematic review of the literature (January 2004 to April 2014) was done using the databases PubMed, CINAHL and Embase and groups of keywords associated with ‘exoskeleton’, ‘lower limb’ and ‘paraplegia’.
Results: Seven articles were selected. Exoskeleton use is effective for walking in a laboratory but there are no training protocols to modify identified outcomes over term usage (ReWalk™: 3 months, Mina: 2 months, and Indego: 1 session). Levels of evidence of selected papers are low.
Conclusions: The applicability and effectiveness of lower limb exoskeletons as assistive devices in the community have not been demonstrated. More research is needed on walking performance with these exoskeletons compared to other mobility devices and other training contexts in the community.
2.3 Introduction
In the United States, it has been estimated that about 273 000 Americans lived with spinal cord injury (SCI) in 2013 and that each year nearly 12 000 new cases occur [63]. In Canada, over 85 000 Canadians lived with SCI according to a survey conducted in 2010 [2]. SCIs have serious consequences, such as the loss of motor and/or sensory functions in the lower limbs, trunk or upper limbs, depending on the type and level of the injury [64]. To enhance mobility of individual with SCI, various assistive devices such as canes, walkers or wheelchairs could be used depending on the level of the injury. However, these traditional assistive devices do not allow users to achieve full social participation since they may limit their ability to do their daily activities and household chores, play sports, and go out into the community.
In recent years, innovative mobility devices have been developed such as powered lower limb exoskeletons that help individuals with low-level SCI walk as naturally as possible. According to Kawamoto and Sankai [40], “an exoskeleton consists of an external structure which covers the human body parts and has joints parts corresponding to those of the human body.” It directly provides mechanical power for the operator to amplify human muscle strength. Dollar and Herr [41] have defined it “as an active mechanical device that is essentially anthropomorphic in nature, is ‘worn’ by an operator and fits closely to his or her body, and works in concert with the operator’s movements. In general, the term ‘exoskeleton’ is used to describe a device that augments the performance of an able-bodied wearer.” In theory, these definitions do not necessarily indicate that exoskeletons are designed for individuals with physical disabilities such as those with SCI but, in practice, we found some efforts in that regard. We identified two kinds of exoskeleton applied to individuals with physical impairments: 1) those used in the community as assistive devices like walking aids (e.g. Rex Bionics’ vision is to deliver mobility to wheelchair users through advanced robotics; where those that have lost their mobility can stand, walk and live active lives in their community [34]; and 2) those used as a therapeutic/treatment modality in a rehabilitation context (e.g. Ekso Bionics suit is a gait training exoskeleton intended for medically supervised use by individuals with various levels of paralysis or hemiparesis due to neurological conditions such as stroke, SCI or disease, traumatic brain injury and more. With medical clearance, it typically facilitates walking for people with a broad range of motor abilities and sizes; which may include up to C7 complete, any level of incomplete SCI, and non- or pre-ambulatory individuals post-stroke [35]. A recent systematic
17 review [27] supported the effectiveness of exoskeletons used as a therapeutic/treatment modality under the supervision of a physiotherapist with the aim of stimulating the person’s physical condition (e.g. spasticity and blood pressure) or recovering certain aptitudes with more intensity and feedback (e.g. training for walking, balance and transfers). These exoskeletons have varying characteristics (e.g. harnesses to support the person when moving and on a treadmill) and human help is often required to install, adjust or activate the device or make it operable.
The use of exoskeletons as walking aids has not, however, been studied. Based on the Disability Creation Process framework [65], an assistive device aims to correct impairment, compensate for a disability, or prevent or reduce a handicap situation by influencing the interaction between individual and environment, which is exactly what an exoskeleton does when used as an assistive device. In addition, recent technological developments indicate that it may be possible for certain lower limb exoskeletons initially developed as a treatment modality to be used in the community as walking aids. Since rehabilitation professionals working with clients with SCI may potentially be asked to prescribe these types of assistive devices and thus wonder about their clinical effectiveness with respect to mobility, it is important to document their physical characteristics and their applicability in the community.
In response to this dearth of information, this paper aimed to systematically review the literature [66] to assess the evidence concerning exoskeletons that can be used as walking aids by people with low-level SCI. The specific objectives were to: 1) describe the characteristics of exoskeletons that could be used as assistive mobility devices in the community by individuals with complete low-level SCI and their related training protocols; 2) document outcomes in terms of functional mobility provided by these exoskeletons; 3) document secondary skills and benefices achieved with these exoskeletons, safety, user satisfaction and applicability in the community; and 4) establish the level of scientific evidence of the selected studies.
2.4 Method
For this review, the search focused on articles in English or French published between January 2004 and April 2014 since technologies published more than 10 years ago could be obsolete. The PubMed, CINAHL and Embase databases were searched during the month of April 2014. The advanced search method was used with combinations of keywords related to ‘exoskeleton’, ‘lower limb’ and ‘paraplegia’ or ‘spinal cord injury’. This generated 159 titles; 27 that appeared more than once were eliminated.
2.4.1 Selection process
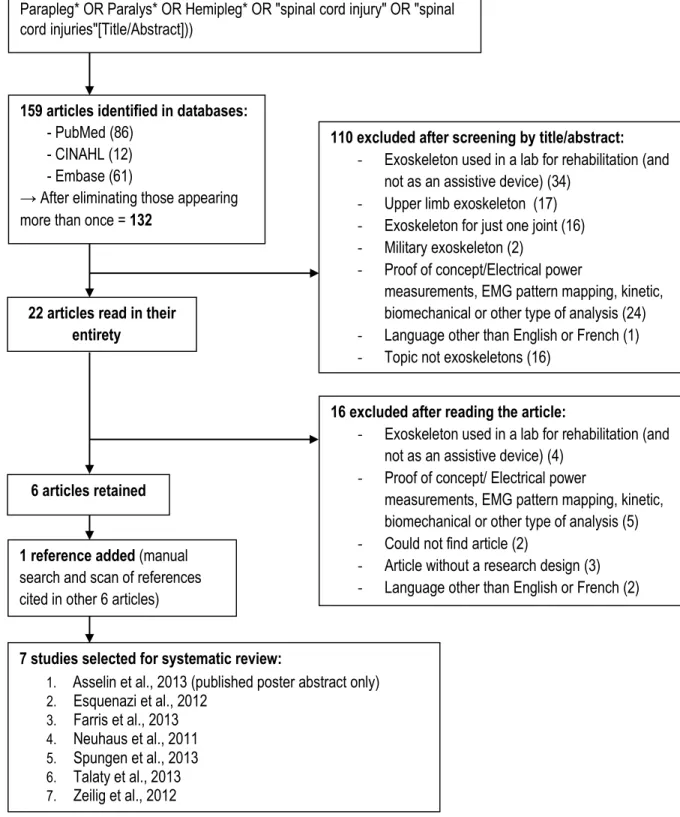
The first author (VL) selected the articles in this review. To be included in the analysis, each article had to meet all three selection criteria: 1) study involving the use of lower limb exoskeletons and functional mobility outcomes; 2) participants had to have complete or incomplete SCI that caused walking disabilities; and 3) the exoskeletons had to be adjusted to the lower limbs and be used as a walking aid. Exclusion criteria were: exoskeleton for military purposes, exoskeleton used for therapeutic rehabilitation purposes (i.e. not as an assistive mobility device), exoskeleton used for just one joint, exoskeleton used as a proof of concept with an electromyography, kinetic, biomechanical or other type of analysis. Of the 132 articles initially identified, only 22 met the selection criteria in both the title and abstract, and 16 of these were eliminated after reading the full text. Ultimately, seven studies were retained for the systematic review, six from the databases and one found by a scan of the references cited in the six other articles. The entire selection process [72], including the exact number of papers selected and excluded, is outlined in figure 6.
19 159 articles identified in databases:
- PubMed (86) - CINAHL (12) - Embase (61)
→ After eliminating those appearing more than once = 132
22 articles read in their entirety
110 excluded after screening by title/abstract: - Exoskeleton used in a lab for rehabilitation (and
not as an assistive device) (34) - Upper limb exoskeleton (17) - Exoskeleton for just one joint (16) - Military exoskeleton (2)
- Proof of concept/Electrical power
measurements, EMG pattern mapping, kinetic, biomechanical or other type of analysis (24) - Language other than English or French (1) - Topic not exoskeletons (16)
7 studies selected for systematic review:
1. Asselin et al., 2013 (published poster abstract only) 2. Esquenazi et al., 2012 3. Farris et al., 2013 4. Neuhaus et al., 2011 5. Spungen et al., 2013 6. Talaty et al., 2013 7. Zeilig et al., 2012 - 6 articles retained
16 excluded after reading the article:
- Exoskeleton used in a lab for rehabilitation (and not as an assistive device) (4)
- Proof of concept/ Electrical power
measurements, EMG pattern mapping, kinetic, biomechanical or other type of analysis (5) - Could not find article (2)
- Article without a research design (3) - Language other than English or French (2) 1 reference added (manual
search and scan of references cited in other 6 articles) 1. Search by keyword strategy:
2. (((Exoskeleton* OR Exo-skeleton*[Title/Abstract]))) AND (("Lower extremity" OR "Lower extremities" OR "Lower limb" OR "Lower limbs" OR Parapleg* OR Paralys* OR Hemipleg* OR "spinal cord injury" OR "spinal cord injuries"[Title/Abstract]))
Figure 6. Flow of information through the different phases of the systematic review of lower limb exoskeletons used for functional mobility by people with SCI (based on ‘Preferred Reporting Items for Systematic reviews and Meta-Analyses – The PRISMA Statement [67])
2.4.2 Data extraction
Once the selection process was completed, the first author (VL) extracted the relevant data using categories presented in tables 1 and 2. In table 1, all the articles are presented by alphabetical order of the first author’s name, with the research objective(s), study design, sample size and subject profile. Then, for objective 1, the exoskeletons and their characteristics are described (e.g. movements, weight and battery) as well as the training protocol including supervision and the parameters monitored. The description was completed using specifications available on the Websites featuring these exoskeletons. In table 2, selected papers are classified by declining order of scientific quality (for objective 4). Clinical and mobility outcome measures (for objective 2) as well as secondary skills and benefices, safety and user satisfaction (for objective 3) are presented.
2.4.3 Data analysis
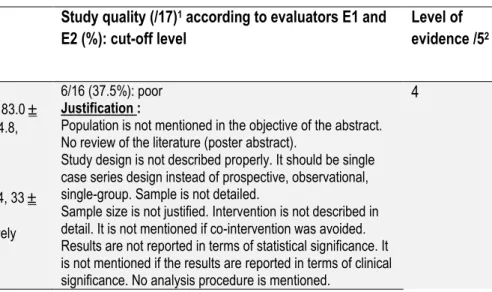
The scientific quality and level of evidence for each of the studies were independently analysed by the first two authors of this paper (VL and CV). The first author has been a kinesiologist since 2012 and recently was a master’s candidate. The second author has been an occupational therapist since 1990 and a researcher and professor in a university rehabilitation department since 1997, and is the first author’s academic supervisor. They both assessed the scientific quality of the seven articles using the Critical Review Form -- Quantitative Studies developed by Letts et al. [68] (see Annex D). This rating form is used to identify critical elements that should be present in a scientific article in the field of rehabilitation. It contains nine categories for a total of 17 items: study purpose (1 item), literature review (1 item), study design (1 item), sample (2 items), outcomes (2 items), intervention (3 items), results (2 items), clinical importance (3 items) and conclusions (2 items). A score of 1 is assigned to each item considered satisfactory and a score of 0 to those considered unsatisfactory or absent. If an item is considered not applicable to a study, the rater indicates ‘not applicable’. Since the form does not give an overall score or criteria for judging the level of scientific quality, the authors of the present manuscript suggest that for items that are present (and applicable), an overall score of over 80% would indicate excellent scientific quality, between 80% and 70% acceptable quality, and under 70% poor quality. This suggestion is based on the cut-offs used for internal consistency, typically measured using Cronbach's alpha (the extent to which items in the same instrument all measure the same trait).
21 The next step in analysing the articles was to rate the level of evidence based on The Oxford 2011 Levels of Evidence table developed by Howick and colleagues [69]. This table contains seven questions and five levels of evidence (1: highest to 5: lowest) related to the research design of the study being rated. Examples of questions are: ‘How common is the problem?’, ‘Is this diagnostic or monitoring test accurate?’, ‘How does this intervention help?’ For the rating scale, a score of 1 indicates that the study’s level of evidence is high since it includes elements from level 1 with high level designs. At the other end of the scale, a score of 5 applies to more exploratory designs since the study includes some level 5 elements. At level 1 are systematic reviews of cross-sectional studies, cohort studies or randomised controlled trials, at level 2 are randomised controlled trials, at level 3 are prospective cohort studies, at level 4 are case-series and case-control studies, and at level 5 are deductive/mechanism-based reasoning and proofs of concept. After the data were extracted from the studies by the first two authors, they achieved consensus concerning the interpretation of disputed elements such as the quality ratings for some studies (applicable, not applicable, present and absent items). It is noteworthy that at this point the authors had already assigned the same levels of evidence.
2.5 Results
Seven papers published between 2011 and 2013 were selected for this review. In these papers, three exoskeletons were tested: the ReWalk™ (5 studies), the Indego® (1 study) and the Mina (1
study). As shown in table 1, all seven studies have exploratory objectives and exploratory research designs (case series observational study, single case series design, and assessment post-training) [24, 32, 53-55, 57, 58]. The samples of the selected studies are small and vary between 1 and a dozen participants. The participants’ profile varies from one study to the next with respect to age (between 20 and 42 years), gender (22 males, 6 females, 17 not specified), level of the injury (most complete, thoracic level), ASIA (American Spinal Injury Association) scale (reported only in three of the seven studies), time since the accident (1 to 14 years), and anthropomorphic data (when available).
2.5.1 Characteristics of exoskeletons and training protocols (objective 1)
The movement modes enabled by the three exoskeletons are the same (sit-to-stand transitions, standing, stand-to-walk transitions, walking, walk-to-stand transitions, and stand-to-sit transitions), except for the Mina, which does not have ‘stand up or sit down’ movements. To control the exoskeleton’s movements, the ReWalk™ is activated with minor trunk movements and a wrist pad controller. Mina and Indego® are activated with torque control only. Mina uses compliant actuation to
power the hip and knee joints for walking only [70]. Paralysed users can balance and walk using the device over level terrain with the assistance of forearm crutches employing a quadrupedal gait. Sensory substitution feedback mechanisms are initiated to augment the user’s sensory perception of his/her lower extremities. Using this sensory feedback, users can ambulate with a more natural, upright gait and directly control the gait parameters and respond to perturbations [70]. For the Indego, there are vertical and horizontal position sensors that monitor the exoskeleton when the user is still standing and when he/she is leaning forward [31]. When the user leans forward, and much like a Segway scooter, the device interprets that as intent to walk. Indego activates motors at the knee and hip, lifting the user’s leg. The forward momentum created by the user’s lean propels the lifted leg, effectively taking a step. Users also use crutches for balance and to control the direction. When the user stops leaning forward, the device stops initiating leg lifts and returns to a standing position [71]. The movement modes can obviously influence the effectiveness and applicability of the exoskeleton as an assistive mobility device.
Besides the movement modes, other characteristics can influence the use of an exoskeleton as an assistive mobility device in the community. As illustrated in table 1, the ReWalk™ and Mina exoskeletons have some common features such as a backpack containing the battery and mechanical components that are strapped to the trunk, thighs, knees, calves and ankles with five to seven straps. The Indego® is the only one designed to be used with ankle-foot orthoses for the feet
[31], unlike the other two where the foot segments are included in the exoskeleton itself. When wearing the exoskeleton, the lack of shoulder straps to support the battery may make the Indego®
more comfortable when moving and performing tasks. In addition, the Indego® does not have any
exposed cables or anything heavy to carry on the back and does not require a backpack. According to the Indego® Website [31], the device is quick and easy to put on, take off and adjust with just one
23 looks less fitted than the other two, which can also affect comfort in movements and tasks. The total weight of the exoskeleton is available only for the ReWalk™ (20.9 kg) and the Indego® (12.3 kg).
Battery life is another important aspect to verify for potential use of an exoskeleton in the home or the community. According to data available at this time, the ReWalk™ battery lasts about eight hours [30], which is twice as long as the Indego®. No information is available for the Mina.Table 1 presents
more detailed features and characteristics of these exoskeletons. All these technical characteristics could facilitate or, conversely, hinder the potential use of an exoskeleton in a person’s daily life at home.
The training protocols associated with the selected exoskeletons vary greatly from one study to the next, as shown in table 1. The number of training sessions varies from 1 to 45, sessions last between 50 and 120 minutes, and they can be spread over a period of 2 (for the Mina) or 3 months (for the ReWalk™). Also, in the protocols, the number of tasks to be done in a session varies widely (from 2 to 20), as does the number of parameters monitored (between 0 and 8). Most of the time supervision is provided by a physiotherapist.
Tableau 1. Main characteristics of the selected studies, presented by alphabetical order of first author's name
Author (year)
[ref] and objective of the study
Study design
(sample size) Participant profile(s) Description and characteristics of the assistive technology (exoskeleton) Description of the training protocol (intervention)
Asselin et al. (2013) [53]
To measure retention of exoskeletal walkng ability one month after completion of
ReWalk™ training with 6MWT
and 10MWT.
Case series observational study (n=5)
Age: not available Gender: not available Injury characteristics: T,
complete
Time since injury: not
available
Anthropometric data: not
available
The ReWalk™: See Talaty et al. (2013) for the description
Frequency: not available
Content: Training protocol consisted of
learning to ambulate using the device. 10MWT and (6MWT) from the final five training sessions were averaged and compared to subsequent measurements obtained after a minimum of 30 days post-completion of the training. Testing was done during the follow-up session (participants were allowed to take only a few practice steps before measurements).
Supervision: not available
Parameters monitored: not available
Esquenazi et al. (2012) [54]
To assess the safety and performance of ReWalk™ in enabling people with paraplegia due to spinal cord injury to carry out routine ambulatory functions.
Case series observational study (n=12)
Age: Ranged from 20 to 55
years. Mean is not presented (we have calculated : 37.8 10.9 years)
Gender: 8M, 4F
Injury characteristics: T3 to T12, complete
Time since injury:
Ranged from 1.0 to 24.3 years. Mean is not presented (we have calculated 7.4 7.6 years).
Anthropometric data
Ranged from 55.8 to 88.6 kg, 163 to 188 cm. Means are not presented (we have calculated 73.7 kg, 1.8 m)
The ReWalk™: See Talaty et al. (2013) for the
description Frequency: 24 sessions lasting 60 to 90 min. (3x/week for 8 weeks)
Content: Training protocol included
sit-to-stand and sit-to-standing activities in the parallel bars, stand-sit transfers, standing balance, skills related to stepping, then walking performance with step triggering, coordinating step timing and foot
clearance, safe and effective stopping, and finally, full self-control using the wrist pad controller. Tests were done near the end of the training.
Supervision: physiotherapist
Parameters monitored: Heart rate (HR),
blood pressure (BP), spasticity, self-reported pain and fatigue with visual analogue scales (VAS) and skin integrity
25 Tableau 1. Main characteristics of the selected studies, presented by alphabetical order of first author’s name (continued)
Author (year)
[ref] and objective of the study
Study design
(sample size) Participant profile(s) Description and characteristics of the assistive technology (exoskeleton) Description of training protocol (intervention)
Farris et al. (2013) [55]
To compare legged locomotion using exoskeleton (Indego®) to locomotion using knee-ankle-foot orthoses (KAFOs) on a subject with a T10 motor and sensory complete injury.
Single-subject case
study (n=1) Age: 42 years Gender: M Injury characteristics:
T10, ASIA A
Time since injury: 10
years
Anthropometric data:
75 kg, 1.85 m
The Indego® consists of a hip segment, a right and left thigh segment, and a right and left shank segment. Although the exoskeleton does not explicitly contain a foot segment or ankle joint, it is designed to be used in conjunction with a set of standard ankle-foot orthoses. The average walking speed is 0.22 m/s (0.8 km/h).
Modes: sit-to-stand transitions, standing,
stand-to-walk transitions, stand-to-walking, stand-to-walk-to stand transitions, and stand-to-sit transitions
Total weight: 12.3 kg Battery life: 4 hours [31]
Information on the Indego® exoskeleton:
http://www.indego.com/indego/en/home
Frequency: 1 session
Content: Training protocol consisted of the
assessments (TUG, 10MWT and 6MWT) with the KAFO first, followed by the same assessments with the exoskeleton. Tests were done after the subject’s HR returned to a resting condition.
Supervision: physical therapist
Parameters monitored: HR
Neuhaus et al. (2011) [32]
To present the Mina, a robotic orthosis for assisting mobility, that offers a legged mobility option for persons suffering from paraplegia or paraparesis.
Not mentioned [Assessment post training] (n=2)
Age: 20 and 26 years Gender: 1M, 1F Injury characteristics:
T10, ASIA A. T12, ASIA A
Time since injury: 3
and 4 years
Anthropometric data:
Not available
Mina attaches to the user at the torso and at three places on each leg: thigh, shank, and foot. The torso section consists of a rigid back plate which has a curvature to match the human spine. At the torso, there are two shoulder straps and a pelvis strap which secure the user’s torso to the rigid back plate. Mina does not provide any hip ab-adduction or medial/lateral rotation of the leg. Walking is possible with torque control and paraplegic assistance like crutches [28]. The fastest walking speed is 0.2 m/s (0.72 km/h).
Mode: walking
Total weight: not available Battery life: not available
Information on the Mina exoskeleton:
http://robots.ihmc.us/x1-mina-exoskeleton/
Frequency: 9 sessions over 2 months
(subject #1); over 5 days (subject #2)
Content: Training protocol included
standing and walking between parallel bars, then standing and walking with the crutches only. A video monitor was placed in front of the subjects during initial training to provide a real-time side view of them. Tests were done during the training.
Supervision: medical professional Parameters monitored: bruises, open
Tableau 1. Main characteristics of the selected studies, presented by alphabetical order of first author’s name (continued)
Author (year)
[ref] and objective of the study
Study design
(sample size) Participant profile(s) Description and characteristics of the assistive technology (exoskeleton) Description of the training protocol (intervention)
Spungen et al. (2013) [57]
To determine the number of sessions and level of assistance needed to execute standing, walking, and stair climbing skills in a powered exoskeleton
(ReWalk™).
Single-group pre/post intervention [Single case series design] (n= 7) Age (mean SD): 42 12 years Gender: 6M, 1F Levels of injury: T4 to T11, ASIA A (n=5). T1 and T4 ASIA B (n=2)
Time since injury: 1.5 to
14 years
Anthropometric data (mean SD):
Height: 175 8 cm Weight: 73.2 SD 7.5 kg
The ReWalk™: See Talaty et al. (2013) for the
description Frequency: 45 sessions SD 20 lasting 60 to 120 min. (3x/week)
Content: Training protocol included primary
standing skills: sit-stand, stand-sit, double/single arm crutch standing and secondary skills: self-activation of the remote-control wristband and retrieving an item over the head. Primary walking skills: walking 10m and pivot turns in both directions. Secondary skills: indoor tasks (walking on carpet, navigating a push button electric door) and outdoor tasks (walking on concrete, uneven and ground surfaces). Tests were done on a weekly basis.
Supervision: trainer
Parameters monitored: HR, BP, RPE
Talaty et al. (2013) [58]
To report our preliminary analysis (with ReWalk™) into how the walking kinematics differed across the subjects – as a first step to understand possible contribution to velocity range and determine if the subjects who did not walk as well could be taught to improve by mimicking the better walkers.
Not mentioned [Assessment post training] (n=12)
Age: not available Gender: not available Injury characteristics: C7
to T12, complete
Time since injury: not
available
Anthropometric data:
not available
The ReWalk™ contains a pair of hip and a pair of knee joint motors powered by rechargeable batteries and a control system housed in a user-worn backpack. The system is entirely self-contained and subject-directed. Users control their own walking through minor trunk movements and a wrist-pad controller. A tilt sensor determines trunk angle and generates a prescribed hip and knee displacement (angle and time) that results in a step. Maximum walking speed is 0.6 m/s (2.2 km/h).
Modes: walk, sit-stand, stand-sit, up and down steps
Total weight: 20.9 kg [72] Battery life: 8 hours [30]
Information on the ReWalk™ exoskeleton:
http://rewalk.com/products/
Frequency: 24 sessions lasting 60 to 90
min. (3x/week for 8 weeks)
Content: Training protocol consisted of
learning to sit-to-stand, standing activities within parallel bars, stand-sit transfers, standing balance and stepping skills. Then, learning crutch use placement for balance and limb advancement and improving and integrating walking performance with step triggering, coordinating step timing and foot clearance, and safe and effective stopping. Testing was done near the conclusion of the training.
Supervision: not available
![Figure 1. Échelle de classification de l’American Spinal Cord Injury Association (ASIA) [10]](https://thumb-eu.123doks.com/thumbv2/123doknet/6499242.173865/22.918.189.691.439.726/figure-échelle-classification-american-spinal-cord-injury-association.webp)
![Figure 2. Le ReWalk TM [42], le Indego® [43] et le Mina [44]](https://thumb-eu.123doks.com/thumbv2/123doknet/6499242.173865/26.918.115.764.103.433/figure-le-rewalk-tm-le-indego-et-mina.webp)
![Figure 5. Le HULC® [48] et le XOS 2 [49]](https://thumb-eu.123doks.com/thumbv2/123doknet/6499242.173865/27.918.155.804.104.429/figure-hulc-xos.webp)

![Figure 7. Cadre conceptuel adapté du PPH [84] et du QUEST [89]. Légende : Les variables en italique ont été modifiées au cours de l’analyse des données, soit la fusion de deux variables](https://thumb-eu.123doks.com/thumbv2/123doknet/6499242.173865/66.918.90.791.95.728/figure-conceptuel-légende-variables-italique-modifiées-données-variables.webp)
