© Isabelle Poitras, 2019
Validation de mesures d’amplitude d’élévation et
d'activité musculaire à l’aide de capteurs sans fil pour
l'analyse de mouvements fonctionnels à l’épaule
Mémoire
Isabelle Poitras
Maîtrise en sciences cliniques et biomédicales - avec mémoire
Maître ès sciences (M. Sc.)
Validation de mesures d’amplitude d’élévation et
d’activité musculaire à l’aide de capteurs sans fil
pour l’analyse de mouvements fonctionnels à
l’épaule
Mémoire
Isabelle Poitras
Sous la direction de :
Jean-Sébastien Roy, directeur de recherche
Catherine Mercier, codirectrice de recherche
ii
Résumé
L’utilisation de données quantitatives afin de diminuer la prévalence des blessures musculosquelettiques liées au travail est souhaitée et le développement de systèmes portables permettant de mesurer l’amplitude articulaire (capteurs inertiels; IMU) et l’activité musculaire (électromyographie; EMG) pourrait permettre d’obtenir ce type de données. La revue systématique de la littérature sur la validité des capteurs inertiels effectuée dans le cadre de ce mémoire a permis d’identifier un manque d’évidence scientifique pour l’évaluation des mouvements complexes à l’épaule. L’objectif principal de ce mémoire est donc (1) d’évaluer la validité concourante d’IMU (Xsens) dans le calcul d’élévation du bras comparé à un système de capture de mouvements (Vicon) lors de mouvements simples et lors de tâches de manutention; et (2) d’établir la validité discriminante du système d’EMG (Trigno) pour évaluer l’activité musculaire. Méthodologie : Seize sujets ont participé à une séance d’évaluation demandant la réalisation de mouvements simples à l’épaule et de transport de charges (poids et hauteurs de transport variables). Le coefficient de corrélation et l’erreur de mesure (RMSE) ont été calculés afin de comparer les mesures d’amplitude articulaire obtenues à l’aide du Xsens et du Vicon et le root mean square (RMS) ainsi que le pic d’activité musculaire des deltoïdes (antérieurs et moyens) ont été calculés pour déterminer l’effet du poids et de la hauteur (ANOVA à mesures répétées). Résultats : Les coefficients de corrélation entre les amplitudes articulaires obtenues par le Xsens et le Vicon sont élevés (>0,84) et les RMSE sont bas (<11,5°). Un effet significatif du poids et de la hauteur, et un effet d’interaction poids x hauteur ont été observés pour le RMS du deltoïde antérieur (p<0,001) et moyen (p<0,03) et pour le pic d’activité du deltoïde antérieur (p<0,003). Conclusion : L’utilisation combinée du Xsens et du Trigno est un outil intéressant afin d’identifier le niveau de demande de l’emploi, puisqu’ils recueillent des données valides d’amplitude articulaire et d’activité musculaire.
iii
Abstract
Quantitative assessments of workplace settings are required to diminish the prevalence of work-related shoulder disorders. Recent development of wearable sensors to record muscle activity (electromyography [EMG]; Trigno, Delsys) as well as shoulder range of motion (inertial measurement unit; MVN, Xsens) could potentially be used for such workplace assessments. A systematic review on the validity and reliability of IMUs performed within this thesis identified a knowledge gap for shoulder joint movements during complex tasks. The primary objective of this thesis was therefore (1) to assess the concurrent validity of the Xsens system for assessment of shoulder range of motion compared to a motion capture system (Vicon) during simple movements and working tasks and (2) to establish the discriminative validity of the Trigno EMG system for the evaluation of muscle activity. Methodology: Sixteen subjects participated in one session in which they performed simple movements and work lifting tasks (different weights and lifting heights). The correlation coefficient (r) and the root mean square error (RMSE) were used to compare the data collected by the Xsens and the Vicon. The root mean square EMG envelope (RMS) and the peak EMG activity of anterior and middle deltoids were used to establish the effect of weight and height (repeated measure ANOVA). Results: The correlation coefficient between joint angles measured with the Xsens and the Vicon was high (>0.84) and the RMSE was low (<12.82°). A significant effect of weight, height and a weight x height interaction effect were observed for the RMS (anterior; p<0.001; middle: p<0.03) and the peak EMG activity (anterior; p<0.003). Conclusion: The combination of an inertial measurement unit system and a wireless EMG is a potentially useful tool to assess physical demand in real work context as it provides valid data on muscular activity and range of motion.
iv
Table des matières
Résumé ... ii
Abstract ... iii
Table des matières ... iv
Liste des figures ... vii
Liste des tableaux ... viii
Liste des abréviations ... ix
Remerciements ... x
Avant-propos ... xii
Introduction ... 1
1. Lésions musculosquelettiques aux membres supérieurs liées au travail ... 3
1.1 Description de la problématique... 3
1.2. Facteurs de risques ... 4
2. Évaluation des demandes physiques liées au travail en laboratoire et hors laboratoire ... 11
2.1. En clinique (mesures hors laboratoires) : ... 11
2.2 En laboratoire ... 13
Objectifs ... 23
Objectif 1 : ... 23
Objectif 2 : ... 23
Chapitre 1: Validity and reliability of wearable sensors for joint angle estimation: a systematic review ... 24
2.1 Résumé ... 24
2.2 Abstract ... 25
2.3 Introduction ... 25
2.4 Materials and Methods ... 27
2.4.1. Description of the Systems ... 27
2.4.2. Data Sources ... 29 2.4.3. Quality Assessment ... 30 2.4.4. Data Extractions ... 31 2.4.5 Data Analysis ... 31 2.5 Results ... 33 2.5.1. Characteristics of Studies ... 33 2.5.2. Methodological Quality ... 34
v
2.5.3. Criterion Validity and Errors of Measurement by Body Region ... 37
2.5.4. Reliability by Joint ... 40
2.6 Discussion ... 42
2.7 Conclusion ... 46
Chapitre 2: Validity of Wearable Sensors at Shoulder Joint: Combining Wireless Electromyography Sensors and Inertial Measurement Units to Perform Physical Workplace Assessment ... 48
3.1 Résumé ... 48
3.2 Abstract ... 49
3.3 Introduction ... 49
3.3 Materials and Methods ... 52
3.3.1. Participants: ... 52
3.3.2. Instrumentation and data collection: ... 52
3.3.3 Study design and experimental procedure: ... 53
3.3.4. Data processing: ... 54 3.3.5. Statistical analysis: ... 56 3.4 Results ... 56 3.4.1. Kinematic data: ... 56 3.4.2. EMG activity ... 59 3.5 Discussion ... 64
3.5.1. Technical issues to be considered prior to clinical implantation: ... 66
3.5.2. Study limitations: ... 66
3.6 Conclusion ... 67
Chapitre 3 - Discussion ... 68
4.1. Résumé des résultats du Chapitre 1 ... 68
4.2. Résumé des résultats du Chapitre 2 ... 69
4.3. Considérations au niveau du protocole expérimental et techniques – sources d’erreurs potentielles ... 70
4.3.1. Capteurs inertiels ... 70
4.3.2. EMG ... 72
4.4. Retombées cliniques potentielles ... 74
4.4.1. Utilisations potentielles ... 74
4.4.2. Limitations techniques ... 74
4.4.3. Comparaison avec les outils cliniques actuels ... 75
vi
Bibliographie ... 77 Annexe A – Supplementary files Chapitre 1 ... 85
vii
Liste des figures
Figure 1-1 : Exemple d’un système d’axes ... 14
Figure 1-2 : Signal EMG non traité (raw EMG) ... 21
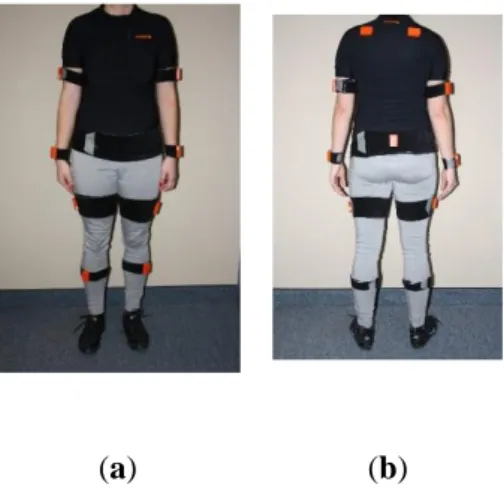
Figure 2-1 : Sensors placement example, a) front view, b) back view. ... 28
Figure 2-2: Flow chart of systematic review process ... 33
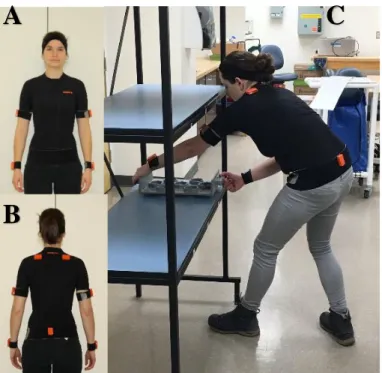
Figure 3-1: A) Positioning example for sensors – front view, B) Positioning example for sensors – back view, C) Lifting trial example; for this specific trial, the left arm was analyzed as it was the arm which was farther from the body when lifting. ... 55
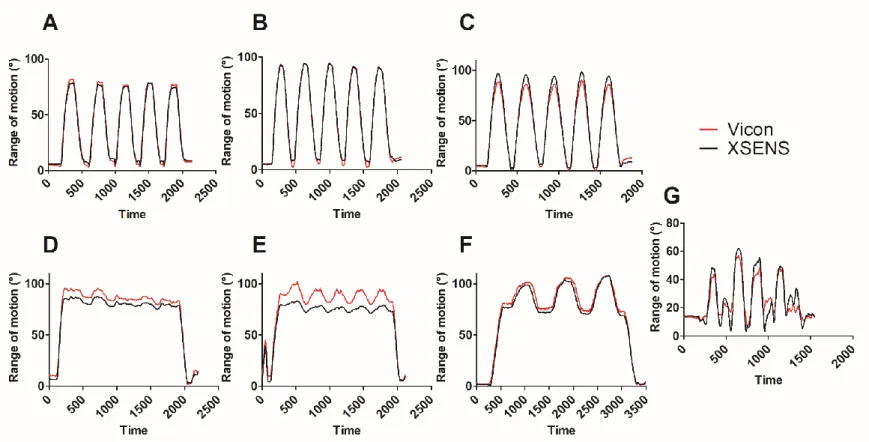
Figure 3-2: Kinematic pattern (range of motion) of a typical subject performing simple movements (A: 90° shoulder flexion , B: 90° shoulder abduction, C: 90° shoulder scaption, D: 90° shoulder flexion combined to trunk flexion, E: 90° shoulder flexion combined to lateral trunk bending, F: 90° shoulder flexion combined to trunk rotation) and a complex task (G: lifting and dropping of a crate on the medium shelf). Vicon kinematic pattern is traced in red and Xsens kinematic pattern is traced in black. ... 57
Figure 3-3 : Anterior deltoid EMG activity (RMS) for a typical subject for different shelves (A: Lower shelf, B: Medium shelf, C: Higher shelf) and weights (Lower shelf: L1 = 2.3 kg, L2 = 6.8 kg, L3 = 13.6 kg, L4 = 22.7kg; Medium shelf: M1 = 2.3 kg, M2 = 6.8 kg; Higher shelf: H1 = 2.3 kg, H2 = 6.8 kg). ... 60
viii
Liste des tableaux
Table 2-1: Synthesis of overall quality and body of evidence by joint. ... 35
Table 3-1 : Correlation coefficient, root-mean-square error, average error of estimate and absolute error for simple and complex movements. ... 58
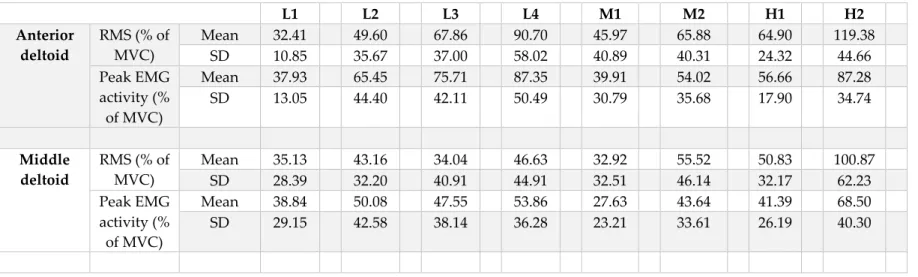
Table 3-2 : Mean and SD of normalized EMG activity (area under the curve and peak EMG activity) for anterior and middle deltoids. ... 61
Table 3-3: Results for anterior and middle deltoids’ EMG activity (p-value and effect size for area under the curve and peak EMG activity)... 62
Table S-1: Specialized keywords used for each database search ... 85
Table S-2 : Synthesis of criterion validity results ... 86
Table S-3: Synthesis of reliability results ... 102
Table S-4 : Assessment of methodological quality by an appraisal quality tool (MacDermid & al., 2008) ... 109
Table S-5 : Assessment of studies examining measurement errors (absolute measures) using COSMIN checklist (box B) ... 111
Table S-6 : Assessment of studies examining measurement errors (absolute measures) using COSMIN checklist (box C) ... 112
Table S-7 : Assessment of studies examining criterion validity using COSMIN checklist (box H) ... 113
ix
Liste des abréviations
ANOVA: analysis of variance
CMC: coefficient of multiple correlation coll. : collaborateurs
EMG : électromyographie (en anglais: Electromyography)
EMGs : électromyographie de surface (en anglais: sEMG surface electromyography) ex. exemple
HQ : high quality Hz : Hertz
IMU : inertial measurement unit
ICC : coefficients de corrélation intraclasse (en anglais: Intraclass Correlation Coefficient) kg : kilogramme
LoA: lower limit of agreement LQ: lower quality
MQ : moderate quality
MUAP : potentiel d’action des unités motrices (en anglais : motor unit action potential) MVC: contraction maximale volontaire (anglais: maximum voluntary contraction) PRISMA: Preferred Reporting Items for Systematic Reviews and Meta-Analyses r: coefficient de corrélation
r2: coefficient de détermination
RMS: root mean square
RMSE: erreur de mesures (anglais: root mean square error) ROM: range of motion
SD: standard deviation
SEM: standard error of the mean VLQ: very low quality
x
Remerciements
Avant de vous présenter le fruit du travail de mes deux dernières années, je tiens à remercier personnellement les gens qui ont rendu cette aventure possible. Un merci spécial à mon directeur de recherche Jean-Sébastien Roy qui, par ses conseils, son support et son dynamisme, a rendu cette expérience enrichissante et agréable. Merci d’avoir poussé mes réflexions plus loin et d’avoir fait de moi une meilleure scientifique. Je tiens également à remercier chaleureusement ma codirectrice de recherche et mentor depuis 2015, Catherine Mercier. Merci de m’avoir permis de faire mes premiers pas en recherche clinique et de m’avoir transmis ta passion, mais merci également de me montrer chaque jour toute la place disponible pour les femmes en recherche. Je tiens aussi à souligner l’apport colossal de Laurent Bouyer et Alexandre Campeau-Lecours. La réalisation d’une maîtrise de recherche demande des expertises variées et sans vos connaissances et votre patience dans mes balbutiements avec MatLab rien de tout ça n’aurait été possible. Je tiens également à remercier mon collègue de bureau, Mathieu Bielmann, pour son aide, son expertise et son support moral dans l’ensemble des analyses.
Merci également à tous les organismes subventionnaires (FRQS, IRSC et IRSST) qui m’ont supportée dans la réalisation de tous mes projets en plus de me permettre de participer à de nombreux événements scientifiques. Des idées ne sont rien sans moyen pour les accomplir, je tiens donc également à remercier Guy St-Vincent et Jean Leblond, respectivement ingénieur et statisticien au laboratoire, pour leurs aides techniques et statistiques.
Un énorme merci à toute l’équipe du laboratoire qui a rendu ma maîtrise aussi enrichissante scientifiquement, que socialement et personnellement. Merci pour les grandes discussions et les fous rires. Vous avez su m’aider à maintenir un équilibre travail-vie sociale satisfaisant. Un merci tout spécial à Anne et Rosanne qui ont su me conseiller, m’écouter et me supporter dans mes grandes interrogations, votre présence a été primordiale. Je tiens également à remercier la personne qui a remis en question mon choix de carrière il y a de cela 6 ans, Henri. Sans toi je serais passée à côté de ce qui me passionne maintenant. Merci de me rassurer et de me faire douter quand il le faut, ton apport dans mon parcours a été inestimable et je l’espère se poursuivra dans les prochaines étapes.
Je veux également dire un merci particulier à mon filet de sécurité et ma plus grande admiratrice, ma mère Gaétane. Merci d’y avoir cru quand j’y croyais moins. Ta présence, tes bons mots et ta confiance en mes capacités m’ont permis de me rendre là où mon cœur le voulait.
xi
Je termine en remerciant mon père et mes amis qui ont été présents et à l’écoute durant ces deux années. Je ne peux malheureusement pas tous vous écrire ici, mais j’ai une pensée pour chacun d’entre vous en écrivant ces lignes.
xii
Avant-propos
Le présent mémoire comporte quatre sections, dont deux (Chapitre 1 et 2) sont composés d’un article scientifique. Le Chapitre 1 a pour titre : Validity and reliability of wearable sensors for joint angle estimation: a systematic review. Cet article sert d’introduction au Chapitre 2 (Validity of Wearable Sensors at Shoulder Joint: Combining Wireless Electromyography Sensors and Inertial Measurement Units to Perform Physical Workplace Assessment) en faisant la revue de l’ensemble des connaissances sur la validité et la fidélité des capteurs inertiels utilisés dans le deuxième article. Le protocole de ce deuxième article est basé sur les conclusions de la revue systématique, c’est-à-dire qu’un manque de littérature est présent actuellement au niveau de l’épaule. La revue systématique a été publiée par le journal Sensors le 31 mars 2019. Le deuxième article a été publié par le journal Sensors le 19 avril 2019. Je suis première auteure sur les deux articles intégrés à ce mémoire. Pour le Chapitre 1, j’ai effectué la préparation de la stratégie de recherche, la sélection des articles, l’évaluation et l’extraction des articles retenus, ainsi que la rédaction. Les coauteurs sont Frédérique Dupuis, Mathieu Bielmann, Alexandre Campeau-Lecours, Catherine Mercier, Laurent J. Bouyer et Jean-Sébastien Roy. Pour le Chapitre 2, j’ai effectué la demande à l’éthique, la mise en place du protocole, la collecte et l’analyse des données, ainsi que la rédaction. Les coauteurs sont Mathieu Bielmann, Alexandre Campeau-Lecours, Catherine Mercier, Laurent J. Bouyer et Jean-Sébastien Roy.
1
Introduction
Le diagnostic, le suivi des symptômes, la prévention et le traitement des blessures musculosquelettiques nécessitent souvent la prise de mesures d’amplitude articulaire, de force musculaire et d’activité musculaire. En clinique, la dynamométrie (ex. Biodex, Jamar) est utilisée pour objectiver la force musculaire résiduelle. Ces différents appareils permettent de quantifier la force musculaire maximale dans un mouvement, mais n’allouent pas la possibilité de mesurer la demande musculaire en continu requise lors d’une tâche fonctionnelle. C’est pour cette raison que des systèmes d’électromyographie (EMG) (avec ou sans fil) sont utilisés en laboratoire afin de quantifier l’activité musculaire avec précision [1]. Pour ce qui est de l’amplitude articulaire, les outils les plus souvent utilisés en clinique sont l’inclinomètre et le goniomètre [2, 3]. Ces outils sont utiles pour effectuer des mesures en passif ou en actif (inclinomètre/goniomètre). Toutefois, ils ne permettent pas la prise de mesure en continu lors d’une activité fonctionnelle et se limitent à des mesures prises dans un seul plan de mouvements, ce qui est peu représentatif de la réalité.
En réponse à ce besoin, de nombreuses études en laboratoire ont été effectuées dans les dernières décennies afin de permettre de quantifier 1) le mouvement humain et 2) l’activité musculaire de la façon la plus précise possible. Tout d’abord, différents types de systèmes de capture de mouvements, soit optiques, optoélectroniques ou électromagnétiques, ont été développés afin de mesurer le mouvement humain. Ceux-ci présentent une excellente validité, une grande précision et une bonne fidélité [4, 5]. Toutefois, ces appareils sont dispendieux, volumineux, nécessitent de grands espaces et une expertise importante [6]. Ces limites ont d’ailleurs mené au développement de systèmes portables, légers et sans-fils permettant des mesures à l’extérieur du laboratoire : les capteurs inertiels [7]. De plus, afin de quantifier l’activité musculaire, différents systèmes d’EMG ont été développés, soit des systèmes de mesure intramusculaire ou de surface (EMGs). Les mesures intramusculaires permettent des mesures de l’activité des muscles profonds, mais se retrouvent limitées quant à leurs contextes d’utilisation (douleur associée au mouvement)[8], alors que la mesure d’EMG de surface permet d’effectuer
2
des mesures précises des muscles superficiels dans une variété de conditions expérimentales [9]. De plus, le développement dans les dernières années de systèmes portatifs et sans-fils a diversifié les contextes potentiels d’utilisation. Ces appareils permettent, tout comme les capteurs inertiels, d’effectuer des enregistrements de longue durée dans des contextes plus écologiques [10]. D’ailleurs, ces caractéristiques font de ces deux systèmes une combinaison d’outils intéressants pour la prévention et la gestion des blessures musculosquelettiques, autant au niveau de la prévention primaire (avant la survenue de la blessure) que secondaire (après la survenue de la blessure).
Les blessures musculosquelettiques liées au travail représentent un problème de santé majeur dans les pays industrialisés. La prévalence de travailleurs qui subiront une blessure au travail se situe entre 20 et 27 % pour une période d’un an [11, 12], et plus particulièrement à 13 % pour ce qui est des blessures aux épaules (articulation la plus touchée aux membres supérieurs) [13, 14]. Ce type de lésion a des répercussions importantes, se traduisant par une perte de qualité de vie pour le travailleur, une diminution de la productivité au travail et des coûts financiers importants à plusieurs niveaux (employé, employeur et société)[15]. Toutefois, malgré tous les efforts mis en place, la prévalence de ces blessures continue d’augmenter [13, 16]. Afin d’adopter des approches préventives permettant de diminuer l’incidence de telles blessures, il est important de pouvoir quantifier les demandes réelles de l’emploi de façon objective, ce qui permettra de cibler des interventions de prévention pertinentes. C’est pour cette raison que les capteurs inertiels et les systèmes d’EMG ont un potentiel intéressant comme outil en réadaptation socioprofessionnelle. En effet, ces systèmes fournissent des données objectives qui pourraient permettre de quantifier la demande réelle d’un emploi en enregistrant en continu les mouvements effectués par le travailleur. De plus, combiner les données recueillies par les deux systèmes permettrait d’offrir un portrait complet des demandes physiques de l’emploi et ultimement de pouvoir quantifier le risque de blessure, qui est représenté dans ce cas-ci par les amplitudes d’élévation à l’épaule et l’activité musculaire déployée, afin d’apporter les modifications requises.
3
Pour d’obtenir des données pertinentes qui permettront de cibler des interventions efficaces et efficientes, il est important de vérifier la validité et la fidélité de ces nouveaux systèmes. Les avancées rapides au niveau des technologies portables ont suscité un intérêt grandissant pour leur utilisation dans divers contextes, mais leur validité demeure à être démontrée. L’objectif général de ce mémoire est donc d’évaluer la validité de technologies portables (système d’EMG sans-fils et capteur inertiel) afin qu’elles puissent être utilisées éventuellement pour quantifier les demandes physiques d’un emploi. Afin de bien comprendre leur utilité et de bien identifier les variables à quantifier grâce à ces systèmes, un survol des facteurs de risque, des mécanismes de lésions associés aux blessures musculosquelettiques aux membres supérieurs, des évaluations actuellement utilisées et des technologies d’analyse de mouvements et d’activité musculaire actuellement disponibles sont présentées dans la première partie de ce mémoire.
1. Lésions musculosquelettiques aux membres supérieurs liées
au travail
1.1 Description de la problématique
Les blessures musculosquelettiques liées au travail aux membres supérieurs représentent un large éventail de pathologies touchant les os, les ligaments, les bourses, la peau, les nerfs ou encore les muscles de l’épaule, du coude, du poignet ou de la main [17]. Les symptômes rapportés par les patients sont également variés, tels que de la douleur, des engourdissements, des raideurs, de l’œdème, un changement de coloration de la peau ou encore des paresthésies [18]. Des limitations fonctionnelles peuvent également être observées, variant à la fois d’un individu à l’autre, mais aussi selon la pathologie diagnostiquée. Elles se traduisent souvent par une diminution de la vitesse de mouvement, de la force, de la mobilité ou du contrôle du mouvement [17]. Comme définit par la World Health Organization, afin d’être catégorisée comme une blessure reliée au travail, sa survenue doit être causée par le travail ou à tout le moins, les symptômes doivent être aggravés par celui-ci [19]. Considérant l’impact important que ce type
4
de blessures a sur la vie du travailleur, son entourage et son employeur, de nombreux efforts ont été mis en place durant les dernières années afin de mieux comprendre les facteurs de risque favorisant la survenue de blessures aux membres supérieurs, ainsi que les mécanismes de lésion sous-jacents [15]. En effet, une meilleure compréhension de la problématique permettra de mettre en place des interventions de prévention et des traitements plus efficaces afin de diminuer la prévalence des blessures, ainsi qu’améliorer la qualité de vie des travailleurs atteints.
Les principaux facteurs de risque identifiés peuvent se classifier dans trois catégories [16, 20] : les facteurs psychosociaux (section 1.1.1), personnels (section 1.1.2) et physiques (section 1.1.3) reliés au travail. Ces facteurs peuvent être reliés entre eux et peuvent avoir un effet combiné sur la condition de l’individu, ce qui en fait une problématique multifactorielle [21]. Chacun de ces facteurs sera détaillé dans la prochaine section, toutefois une emphase plus importante sera mise sur les facteurs physiques, car ils seront le sujet principal de ce mémoire.
1.2. Facteurs de risques
1.1.1. Facteurs psychosociaux
Les facteurs psychosociaux associés à la survenue de blessures aux membres supérieurs liées au travail sont définis comme étant « les risques pour la santé mentale, physique et sociale, engendrés par les conditions d’emploi et les facteurs organisationnels et relationnels susceptibles d’interagir avec le fonctionnement mental » [22]. Plusieurs modèles ont été suggérés durant les dernières décennies afin de mieux comprendre la survenue des blessures musculosquelettiques liées au travail et l’impact des facteurs psychosociaux dans leur développement [23, 24]. De ceux-ci, quatre principaux facteurs ont été retenus comme étant associés au développement des blessures aux membres supérieurs : le faible contrôle sur son environnement, la demande élevée de l’emploi (cognitive, physique et psychologique), un faible support et un faible niveau de reconnaissance [25]. Ces facteurs sont reconnus pour avoir un effet individuel, mais également pour se renforcer mutuellement, ce qui signifie que la combinaison de deux facteurs ou plus a un
5
impact plus important sur la santé du travailleur qu’un facteur seul [26, 27]. Ces facteurs de risque engendrent des réponses physiologiques, dont le stress, qui a leur tour, contribuent à la modification du comportement du travailleur et également à la survenue de la lésion (mécanismes de lésion). [28].
Le stress psychologique, qui peut être relié à l’emploi ou non, intervient de plusieurs façons, en entraînant une modification du comportement du travailleur, le plaçant ainsi dans des situations où le risque de blessures est plus grand (ex. augmentation de la vitesse d’exécution, prise de position contraignante), ou encore par la modification des réponses physiologiques rendant le système plus vulnérable aux blessures (ex. diminution de la capacité de relaxation musculaire) [23]. Plus spécifiquement, il a été démontré que la charge biomécanique interne (ex. force de la contraction musculaire, tension sur les ligaments et structures osseuses) d’une tâche spécifique peut être augmentée lorsque la personne est exposée à des facteurs de stress, et ce sans modifier la demande externe de l’emploi [23]. En effet, la force musculaire déployée en situation de stress serait plus grande, ce qui altérerait les mécanismes de relaxation nécessaires à la récupération musculaire lors des pauses. Cette absence de repos apporterait une altération de la fibre musculaire qui est en partie expliquée par la diminution de la taille des vaisseaux sanguins ce qui entraîne une mauvaise irrigation sanguine des muscles durant l’effort [28] rendant le travailleur plus vulnérable aux blessures [29]. De plus, les facteurs stressants entraîneraient également l’utilisation de schémas d’activation musculaire différents par le travailleur, rendant la performance motrice sous-optimale et moins sécuritaire [30].
1.1.2. Facteurs personnels
Les facteurs personnels sont définis comme des caractéristiques individuelles propres aux travailleurs qui diffèrent d’un employé à l’autre et qui ne peuvent être modifiés par l’environnement externe (ex. sexe, âge, comorbidités…)[23]. Dans le cas présent, le fait d’être une femme et/ou d’être âgé de plus de 55 ans est associé à une augmentation du risque de blessures aux membres supérieurs [20], tout comme l’obésité [31] et la présence de comorbidités [32].
6
Également, des études ont identifié certains traits de caractère comme facteurs de risque (ex. personnalité de type A, introversion), mais les évidences à ce sujet demeurent modestes [23]. Le trait de caractère le plus souvent rapporté dans la littérature est le surengagement dans son emploi. Les auteurs le définissent comme étant le surinvestissement dans les tâches de travail, et ce même durant les périodes de loisir, ce qui diminue la capacité à relaxer du travailleur en plus d’avoir un effet néfaste sur le style de travail adopté par l’employé, le plaçant à risque de blessures [33-35]. Comme ces facteurs sont difficilement modifiables, puisque propres à chaque individu, ils font très peu souvent l’objet d’études et sont souvent considérés comme des facteurs confondants [21]. Par conséquent, les mécanismes sous-jacents sont très peu étudiés. Ils sont d’ailleurs souvent reliés à des facteurs de risques physiques et ceux-ci sont détaillés dans la section suivante.
1.1.3. Facteurs physiques
Les facteurs physiques sont définis comme des facteurs d’exposition physique présents dans le milieu de travail qui place le travailleur à risque de blessures aux membres supérieurs [26]. Ces facteurs peuvent à la fois être occasionnés par la disposition du poste de travail, par la nature même de l’emploi, ou comme vu précédemment être exacerbés par des facteurs personnels propres à l’individu (ex. une personne de petite taille va travailler les bras en élévation plus fréquemment qu’une personne plus grande)[36]. Ils font souvent l’objet d’intervention en réadaptation en ergonomie comme ils peuvent être modifiés en adaptant le poste de travail [37]. Au niveau des membres supérieurs, quatre facteurs de risque ont été identifiés : le déploiement de force excessive, les mouvements répétitifs, le travail avec les bras en élévation (position contraignante) et la manipulation d’objets vibrants [26]. Chacun de ces facteurs de risque, ainsi qu’un résumé des mécanismes de lésions associés à chaque facteur, sera décrit dans la prochaine section.
1.1.3.1. Force excessive
Le déploiement de force excessive à une articulation occasionne la mise en tension des structures musculaires et articulaires (ex. muscles et tendons) engendrant un risque accru de
7
développement de blessures liées au travail [26, 38]. Au niveau de l’épaule, le risque de blessures est d’autant plus important puisque l’épaule est l’articulation la plus mobile du corps humain, la rendant particulièrement vulnérable au changement drastique des forces exercées à son niveau [39]. Cette mise sous tension, particulièrement lors de contractions excentriques, viendrait modifier les structures cellulaires et musculaires en étirant de façon importante la fibre musculaire et en augmentant la réponse inflammatoire associée. Ces réactions physiologiques sont connues comme étant des facteurs contribuant à la réparation tissulaire suite à un exercice de forte intensité, mais également comme ayant un rôle au niveau de la dégradation du tissu lorsque le processus inflammatoire dure plus de 5 jours [40].
Ensuite, il est important de comprendre ce qu’est réellement une force excessive afin de bien intervenir. Une tâche peut être considérée comme demandant une force excessive lorsqu’elle excède les capacités physiques du travailleur, mais également lorsqu’elle demande de façon répétée une contraction demandant plus de 67 % de la contraction maximale volontaire (maximum voluntary contraction : MVC) du travailleur [41]. Toutefois, les concepts de durée de la tâche et de répétition peuvent venir modifier cette définition. En effet, un niveau modéré de force déployée sur une longue période de temps entraîne également une fatigue musculaire importante et un sentiment d’effort (soulèvement de 5 kg plus de 2 fois par minute)[42]. De plus, un niveau d’activité musculaire de faible intensité peut aussi être considéré comme excessif (> 10 % de la MVC) s’il est combiné à la réalisation de mouvements répétitifs (augmentation de 40 % du risque de blessures)[43]. Cela suggère que les mécanismes de lésion liée au déploiement de force excessive sont étroitement liés à ceux de la répétition qui sont détaillés dans la prochaine section.
1.1.3.2. Mouvements répétitifs
Les mouvements répétitifs sont définis comme étant la répétition d’une même séquence de mouvement durant la majeure partie de la journée de travail [44]. Cette tâche nécessite d’effectuer une contraction sous-maximale des muscles associés au mouvement sur une longue période de temps, ce qui peut entraîner une certaine fatigue musculaire et ainsi augmenter le risque
8
de blessures. Les travailleurs effectuant des mouvements répétitifs présentent un risque de 1,4 à 1,7 fois plus élevé de développer des blessures aux membres supérieurs que les autres travailleurs [20]. Les emplois peuvent être classifiés en deux catégories, soit avec un faible ou un haut niveau de répétition, selon qu’un cycle complet de la tâche dure plus (faible niveau) ou moins (haut niveau) de 30 secondes [45]. De plus, selon les mêmes auteurs, il y a une augmentation du risque en fonction de la force déployée à chaque répétition. En effet, les rapports de cotes passent de 3,6 à 30,3 fois plus de risque de développer une blessure lorsque le poids soulevé passe de 1 kg à 4 kg.
La diminution de l’oxygénation du muscle est la principale explication quant au mécanisme de lésion sous-jacent à une blessure par répétition [46]. En effet, le maintien de contractions répétées mène à une fatigue musculaire et une diminution de la circulation sanguine qui entraînent des changements pathophysiologiques au niveau de la fibre musculaire secondaire à une augmentation des marqueurs inflammatoires présents dans la matrice extracellulaire. Dans leur synthèse de la littérature, Barr et coll.[46] proposent une théorie selon laquelle ce mécanisme agirait comme une boucle : la diminution de circulation sanguine catalyse l’augmentation d’inflammation, l’inflammation engendre des microlésions dans le muscle et un changement de la composition des fibres musculaires (ex. augmentation de la fibrose dans le tissu musculaire et nécrose musculaire), puis ces microlésions entraînent à leur tour de la fatigue, et ainsi de suite.
1.1.3.3. Travail avec les bras en élévation/position contraignante
De nombreuses études ont rapporté une augmentation du risque de blessures lorsque les travailleurs effectuent des tâches avec les bras en élévation [26, 36, 47-49]. Il a également été démontré que l’augmentation du risque de blessure est de 1,7 à 3 fois plus élevée pour les travailleurs exposés à ce type de tâches [49, 50]. Une appellation souvent utilisée dans le domaine de la réadaptation socioprofessionnelle est overhead work, c’est-à-dire travailler avec les bras au-dessus de la tête. Une autre définition communément reconnue est : « de travailler avec les mains au-dessus du niveau de l’acromion », ce qui rapporte davantage à des élévations excédant 90° [47,
9
49, 51]. Toutefois, un travail à amplitude moindre, c’est-à-dire à 60° de flexion ou d’abduction, augmenterait également la prévalence de blessures [52, 53]. Ces différences peuvent être partiellement expliquées par d’autres facteurs tels que la durée consécutive du travail en élévation (augmentation significative lorsque le travailleur est en position d’élévation durant 10 % ou plus de son temps de travail) [49] et la direction dans laquelle le travail est effectué (plus grand risque de blessures lorsque les mains sont tournées vers l’arrière) [36]. Considérant les contradictions présentes dans la littérature scientifique concernant le degré d’élévation favorisant les blessures, les deux amplitudes articulaires considérées comme un seuil augmentant le risque de blessures (60° et 90°) ont été intégrées dans le protocole principal présenté dans ce mémoire.
Cette grande vulnérabilité du membre supérieur au travail en élévation, et plus particulièrement de l’articulation de l’épaule, est causée par sa grande mobilité. En effet, l’épaule est en mesure de bouger dans plus de degrés de liberté que les autres articulations du corps [39]. Cet avantage fonctionnel important a toutefois un coût, l’épaule est également l’articulation la plus instable du corps humain, ce qui en fait la deuxième articulation la plus touchée par les blessures musculosquelettiques [54].
Le travail en élévation aux épaules entraîne trois conséquences physiologiques, soit l’augmentation de la pression intramusculaire, la diminution de la circulation au niveau des muscles et l’augmentation de la fatigue musculaire [47]. Ces trois mécanismes sont indissociables et lorsque combinés entraînent une diminution de la capacité du muscle à récupérer lors de tâches en élévation aux membres supérieurs, et ce pour des tâches de durée variable [47]. En effet, il a été démontré qu’une tâche, même de courte durée, avec les bras à 90° de flexion ou d’abduction entraîne une augmentation de la pression intramusculaire dans les muscles de la coiffe des rotateurs (supra-épineux et infraépineux) [51]. L’augmentation de pression entraîne ensuite la diminution de la circulation sanguine dans le muscle comprimé [55], et éventuellement, l’apparition de fatigue musculaire [56]. Les répercussions comportementales de cette cascade d’événements sont nombreuses et peuvent se traduire par exemple par des changements de
10
position ou une diminution de l’amplitude du mouvement. Ces modifications observables sont souvent combinées à des changements moins perceptibles au niveau de la biomécanique du mouvement, telles qu’une diminution de l’angle de l’acromion ou la modification du rythme scapulohuméral, et ces changements dans le patron de mouvement dit « normal » peuvent mener à des blessures [57, 58]. Finalement, la friction et les forces transversales s’exerçant sur les tissus mous auraient également un rôle à jouer dans l’augmentation du niveau d’inflammation lors des tâches nécessitant l’adoption de positions contraignantes [59].
1.1.3.4 Manipulation d’objets vibrants
La manipulation d’objets vibrants est associée avec une augmentation du risque de blessures liées au travail, plus particulièrement au niveau de la main, mais aurait aussi un effet non négligeable quant au développement de blessures aux épaules [59]. En effet, une exposition prolongée à des vibrations de 125 Hz et plus entraînerait une diminution de la vascularisation des membres supérieurs, et ce même après avoir cessé l’exposition à la vibration [60]. Au niveau de l’épaule, l’utilisation pendant deux heures ou plus de son quart de travail d’un objet vibrant augmente le risque de la survenue d’une tendinopathie de l’épaule de l’ordre de 1,04 à 3,5 fois [42]. La pathophysiologie liée à ce facteur de risque demeure assez peu décrite dans la littérature [59], des théories au niveau du développement de fatigue musculaire et de friction ont toutefois été suggérées [28]. De plus, la combinaison de ce facteur de risque avec un ou plusieurs des autres facteurs présentés précédemment augmenterait le risque de blessures à l’épaule de façon importante [38] et en fait un élément non négligeable à considérer par les cliniciens.
L’ensemble de ces facteurs de risque contribue au développement des blessures aux épaules et les interventions effectuées au travail visent leur modification [61]. Les évaluations effectuées actuellement en clinique et en laboratoire seront donc présentées dans la prochaine section.
11
2. Évaluation des demandes physiques liées au travail en
laboratoire et hors laboratoire
Afin de prévenir ou de guérir les blessures musculosquelettiques liées au travail, il est important d’avoir des mesures justes et pertinentes de la situation clinique (capacité du travailleur et demande de l’emploi) en lien avec les facteurs de risques cités plus haut. Pour ce mémoire, une emphase sera mise sur les facteurs physiques comme ce sont les leviers d’intervention les plus souvent ciblés en clinique. Afin d’être représentatif du risque réel de blessures, il est important de considérer le plus de facteurs physiques possibles, puisqu’il a été démontré que le niveau de risque augmente avec le nombre de facteurs auxquels le travailleur est exposé [38]. Pour ce faire, la prochaine section fera un survol des outils d’évaluation actuellement utilisés en clinique et en laboratoire.
2.1. En clinique (mesures hors laboratoires) :
Lors d’un processus de retour au travail, les différents professionnels de la santé impliqués utilisent de nombreuses évaluations afin de statuer sur le moment propice pour un retour au travail rapide et durable. Afin d’avoir un portrait complet du travailleur, des informations sur l’emploi antérieur, sur la nature de la blessure, ainsi que sur les déficits physiques doivent être recueillies [62]. Les bases de données détaillant la nature de chacun des emplois sont souvent le point de départ afin d’identifier les tâches attendues pour un travailleur sain [63]. De cette façon, ils déterminent plus efficacement les évaluations et interventions pertinentes pour chaque situation clinique. En effet, les exigences de l’emploi sont bien différentes entre un travailleur de bureau et une personne effectuant de l’entretien ménager. Dans le premier cas, une meilleure endurance assise sera nécessaire et dans le second, ce sera la prise de positions contraignantes (ex. accroupi ou à genoux) qui sera primordiale. Ensuite, les différents professionnels de la santé établissent le portrait des capacités résiduelles du travailleur afin de statuer sur l’adéquation entre celles-ci et les exigences du travail établies théoriquement par des recherches dans la littérature scientifique et les bases de données. Cette analyse est un bon point de départ, mais elle ne peut être considérée
12
comme complètement représentative du contexte sans une analyse dans l’emploi réel [62]. Afin d’avoir un portrait plus complet de la situation d’emploi, des questionnaires/entrevues avec le travailleur, des évaluations ergonomiques au travail ou encore des enregistrements vidéo sont souvent utilisés [64]. Une brève description de chacune de ces méthodes d’évaluation, ainsi que leurs forces et limites, sera présentée dans la prochaine section.
2.1.1. Questionnaires autoadministrés, journaux quotidiens et entrevue avec le travailleur
Des mesures fréquemment utilisées afin d’identifier rapidement les aspects à travailler en thérapie sont les questionnaires autoadministrés. Les informations ciblées dans ce type de questionnaires dépendent de plusieurs facteurs, dont le site de la lésion et le travail occupé par le client [64]. Ces questionnaires peuvent également être combinés à des journaux de bord remplis chaque jour afin de bien identifier les facteurs de risque de blessures liées au travail [65]. Cette méthode présente plusieurs avantages, dont le fait d’être simple, peu coûteuse et d’utiliser peu de temps de thérapie dans le cas où le questionnaire est rempli à l’extérieur [66]. Une autre façon de recueillir des informations sur le contexte d’emploi est d’effectuer des entrevues avec le travailleur. Cette méthode est plus coûteuse en temps, mais permet plus de flexibilité dans les questions posées et permet souvent de recueillir plus d’informations que les questionnaires. Toutefois, l’ensemble des informations recueillies demeure sujet à de nombreux biais (désirabilité sociale, de rappel, biaisé par la présence de douleur) [65, 67], ce qui en fait une mesure subjective qui doit être complétée à l’aide d’autres modes d’évaluation.
2.1.2. Évaluation ergonomique au travail et enregistrement vidéo
Lors d’un processus de retour au travail, il est assez fréquent que les cliniciens, principalement des ergonomes ou des ergothérapeutes, se déplacent en emploi afin d’objectiver les données recueillies par entrevue ou questionnaire. Les observations effectuées sont basées sur les recommandations d’instituts en santé et sur les facteurs de risque démontrés dans la littérature
13
scientifique. Les cliniciens utilisent donc fréquemment des aide-mémoires et des mises en situation afin d’identifier les situations à risque et les pratiques à modifier [68]. Ces méthodes demeurent assez coûteuses en temps, en ressources et demeure représentatives de seulement une partie du travail de l’employé puisque l’observation durera bien souvent une journée ou moins [65]. Les résultats obtenus par cette évaluation dépendent donc de la journée et de la nature du travail effectué cette même journée, mais aussi de l’expérience du thérapeute. Pour augmenter la validité et la fidélité des données recueillies, plusieurs auteurs ont suggéré d’effectuer des enregistrements vidéo de la journée de travail ou de plusieurs jours, ce qui permet un plus grand nombre de visionnements par un plus grand nombre d’évaluateurs [69]. L’amélioration de la qualité de l’évaluation se traduit par une augmentation importante des coûts. La standardisation des méthodes d’évaluation est également une solution proposée afin d’améliorer la fidélité inter-évaluateurs, alors qu’il a été démontré que la majorité des cliniciens se basent sur leur expérience personnelle et utilisent très peu les méthodes standardisées [70].
2.2 En laboratoire
Comme mentionné précédemment, les évaluations actuellement utilisées en clinique sont subjectives ou encore coûteuses en temps et en ressources (ex. enregistrement vidéo) et leurs résultats varient en fonction des réponses données par le travailleur, dépendent de l’expérience du clinicien et sont souvent peu représentatives du contexte réel d’emploi. Dans ce contexte, il est important de développer des méthodes quantitatives afin de les compléter et d’assurer un suivi optimal au patient. En laboratoire, il est possible d’effectuer des mesures objectives de cinématique du mouvement et d’activité musculaire. Ces méthodes sont décrites dans la prochaine section.
2.2.1 Mesure de cinématique du mouvement
Comme mentionné précédemment, l’élévation aux épaules et la répétition sont deux facteurs de risque importants des blessures aux membres supérieurs en emploi. Pour quantifier ces facteurs, une analyse de la cinématique est nécessaire afin de calculer l’amplitude articulaire
14
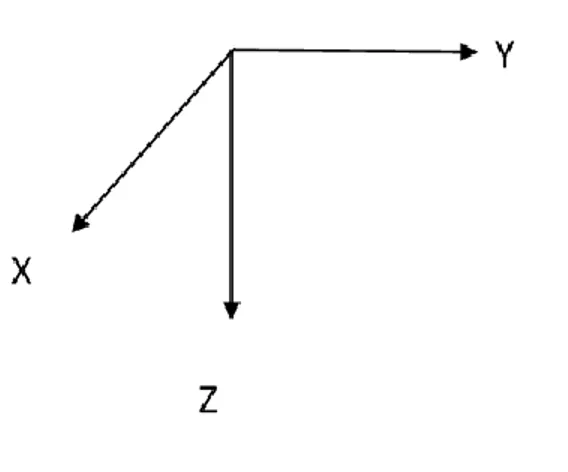
et éventuellement le nombre de répétitions du mouvement. En laboratoire, l’analyse de mouvement est effectuée avec des systèmes utilisant des caméras et des systèmes électromagnétiques qui sont considérés comme la référence, le gold standard, en la matière puisqu’ils fournissent des données valides, fidèles et précises [5, 71]. Lorsque de nouveaux systèmes sont développés, tels que les capteurs inertiels (les résultats de validité et de fidélité sont présentés dans la revue systématique sur le sujet constituant le Chapitre 1 de ce mémoire), les études se basent sur ces systèmes afin d’attester de la validité de la nouvelle technologie [10]. Les données d’orientation calculées à l’aide de ces systèmes sont rapportées selon un système d’axes, comme celui illustré ci-dessous.
Figure 1-1 : Exemple d’un système d’axes
La prochaine section présentera brièvement les différents types de systèmes de référence, leur fonctionnement et celui des capteurs inertiels.
2.2.1.1 Système de référence
Lorsqu’il est question de système de référence pour l’analyse de mouvements, deux types de technologies sont utilisés sur le marché. La première utilise des capteurs magnétiques afin de reconstituer l’orientation des segments du corps et la deuxième utilise des caméras pour capter leurs positions [72]. Cette dernière peut utiliser trois technologies différentes, soit un système de caméra seul (système de capture sans marqueur) ou encore des caméras combinées à des marqueurs passifs ou actifs. Les marqueurs actifs émettent un signal qui est détecté par les caméras, alors que les marqueurs passifs reçoivent le signal émis par celles-ci afin de reconstruire
15
les segments du corps [73]. Ces différents systèmes sont valides et fidèles avec 1 mm et moins de 1° d’erreur d’estimation, ainsi que des coefficients de corrélation intraclasse (Intraclass Correlation Coefficient: ICC) supérieur à 0,9 (comparé à des radiographies)[71, 74]. Malheureusement, ces systèmes nécessitent de grands espaces et une expertise importante pour les faire fonctionner. De plus, il est souvent nécessaire d’adapter les protocoles, car des objets ne doivent pas obstruer la vue des caméras et l’environnement doit être exempt de distorsions électromagnétiques (pour les capteurs magnétiques) [73]. Ces technologies sont donc confinées à des utilisations de laboratoire et c’est pour cette raison que depuis quelques années, les capteurs inertiels, qui seront présentés dans la section suivante, ont été suggérés comme alternative potentielle pour faire l’analyse de mouvement en réadaptation.
2.2.1.2 Capteur inertiel
Un capteur inertiel est composé de trois accéléromètres, trois gyroscopes et trois magnétomètres. Une brève description des capteurs expliquant leurs forces et faiblesses respectives est présentée ci-dessous.
Accéléromètre [6, 75] : L’accéléromètre fournit l’accélération linéaire en XYZ en se basant sur la gravité. Il peut être utilisé comme un inclinomètre afin de donner la mesure d’orientation lors d’une accélération statique en assumant que la direction de Z est en ligne avec la gravité. Toutefois, cette mesure est précise lorsque le capteur lui-même est stable puisque le mouvement affecte le signal d’accélération mesuré. Lors de la prise de mesure du mouvement humain, le déplacement occasionné par la contraction du ventre musculaire vient biaiser la mesure collectée, car le capteur détecte à la fois l’accélération du mouvement et de la gravité.
Gyroscope [76] : Le gyroscope donne la vélocité angulaire en XYZ. L’intégration de la vélocité angulaire sur une période de temps donnée, en assumant que la position initiale est connue et représente un « zéro » défini, permet d’obtenir la position d’un capteur de façon précise. Cependant, il est impossible d’obtenir une mesure initiale de vélocité angulaire non biaisée, ce
16
qui fait en sorte que les données ont tendance à dériver à travers le temps, donnant une orientation de capteurs erronée qui biaisera également les variables calculées à partir de celle-ci (ex. mesures angulaires ou de déplacement).
Magnétomètres [77] : Le magnétomètre donne la position de l’objet en fonction du nord magnétique. Il complète la mesure donnée par l’accéléromètre en indiquant l’orientation autour de l’axe Z. La principale faiblesse de ce capteur est sa sensibilité aux perturbations dans le champ électromagnétique l’entourant qui occasionnent un biais dans les données collectées en raison de la modification du nord magnétique détecté.
L’utilisation seule de chacun de ses capteurs amène un biais dans la mesure d’orientation calculée, toutefois lorsque les données obtenues de ces trois systèmes sont combinées (fusion de données), les valeurs obtenues sont plus précises et permettent une meilleure estimation de la cinématique de mouvement [78], et plus particulièrement dans le cas présent, une plus grande précision au niveau de la mesure d’amplitude articulaire. Les développements effectués à ce niveau dans les dernières années ont mené à de nombreuses études sur la validité de ces méthodes et systèmes. Une synthèse de la littérature à ce niveau avait été effectuée en 2010 pour l’ensemble des articulations du corps, et dernièrement en 2018, pour le membre supérieur seulement. Toutefois, une mise à jour des qualités psychométriques pour l’ensemble du corps est requise considérant le nombre important d’études effectuées dans les dernières années et la synthèse partielle rapportée dans l’article de 2018. Les résultats pour l’ensemble du corps sont présentés dans le Chapitre 1 de ce travail.
2.2.1.2.1. Définition des concepts et variables
Plusieurs variables peuvent être extraites à partir des données enregistrées par ce type de capteurs, par exemple la vélocité angulaire [79], le centre de masse [80], la position/l’orientation de l’objet étudié [81], ou encore, comme dans le cadre de ce mémoire, l’amplitude articulaire (en angle d’Euler). La méthode de calcul peut varier entre les différents articles et protocoles, mais
17
trois concepts-clés sont primordiaux afin de bien la comprendre : la calibration, le modèle biomécanique et la séquence de rotation.
La calibration est utilisée afin de réaligner les capteurs en fonction de l’objet étudié, donc dans ce cas-ci, selon les différents segments du corps [82]. Elle permet de mettre en relation les différents capteurs placés sur le corps selon leur position de référence, elle est donc essentielle afin de collecter des données valides et elle doit être faite de nouveau s’il y a un déplacement de capteurs entre les différents essais enregistrés.
Le modèle biomécanique quant à lui dicte les calculs utilisés et la position des coordonnées du centre de rotation de l’articulation étudiée [83, 84]. Le choix du modèle biomécanique a une influence sur les variables calculées à partir des données recueillies par les capteurs et est un choix important à effectuer en fonction du protocole à réaliser. C’est pour cette raison que des recommandations ont été émises pour neuf articulations du corps dont l’épaule par l’International Society of Biomechanics [84] quant aux coordonnées des systèmes d’axe et les repères anatomiques utilisés.
La séquence de rotation quant à elle indique dans quel ordre le mouvement autour des différents axes présentés précédemment sera effectué. Afin d’être comparables entre eux, les angles obtenus de deux systèmes différents doivent avoir été calculés selon la même séquence [83]. Dans le cas contraire, les déplacements peuvent avoir été effectués dans des plans différents et ne représentent ultimement pas le même mouvement.
Finalement, deux variables statistiques différentes sont utilisées plus fréquemment afin de comparer les données recueillies par les capteurs et le système de référence, soit le coefficient de corrélation (r), qui représente la ressemblance de patrons de mouvements entre les deux systèmes, et l’erreur de mesures (Root mean square error (RMSE)), qui représente la différence en degrés entre les valeurs obtenues par chacun des systèmes.
18 2.2.1.2.2. Limites et avantages des systèmes
Les limites des systèmes sont principalement causées par les limites des différents capteurs le composant (accéléromètre, gyroscope et magnétomètre) comme mentionnés précédemment. La combinaison de ces capteurs vise justement à améliorer la validité et permettre un plus grand nombre d’utilisations [78]. Toutefois, l’optimisation de ces méthodes est toujours en cours et l’utilisation de ces systèmes nécessite encore un traitement de données post intervention complexe [85] demandant une expertise importante.
Les capteurs inertiels présentent toutefois des avantages considérables par rapport aux systèmes de référence actuellement utilisés. En effet, ils sont légers, sans-fils, portables, ont une grande autonomie et peuvent être utilisés dans un plus grand nombre de tâches, d’environnements, et ce de façon continue [10]. Cette plus grande flexibilité d’utilisation et les développements rapides dans le domaine en font une technologie prometteuse en réadaptation socioprofessionnelle (ex. enregistrement en continu, possibilité de données de la rétroaction en temps réel).
2.2.2. Mesure d’activité musculaire
Comme abordé précédemment, le déploiement de force musculaire excessive est un facteur de risque pour le développement de blessures aux membres supérieurs. Cette mesure ne peut toutefois pas être prise directement lors de tâches fonctionnelles, car il est seulement possible de la mesurer dans une direction lors de mouvements précis et majoritairement lors de contractions isométriques [86] (ex. force de préhension, force du quadriceps) à l’aide d’un dynamomètre (ex. Jamar, Biodex). Considérant cette limite, la variable utilisée pour évaluer ce facteur de risque est l’activité musculaire par EMG et non la force à proprement dite. Par définition, l’EMG est l’étude de l’activité électrique de la fonction d’un muscle par l’enregistrement du signal électrique généré par ce muscle [87].
19
L’EMG est une technique de plus en plus populaire pour évaluer l’activité musculaire dans un contexte de réadaptation. Deux types d’EMG sont largement utilisés : 1) l’EMG intramusculaire qui consiste à insérer une aiguille dans le muscle d’intérêt [9] et 2) l’EMGs qui consiste à placer une ou des électrodes sur le ventre musculaire du muscle d’intérêt [87]. L’EMG intramusculaire est reconnu pour permettre un enregistrement plus spécifique du muscle visé, en plus de permettre l’accès à l’enregistrement de muscles profonds. Toutefois, la procédure peut occasionner des douleurs, rend le sujet plus à risque d’infections et limite le type de tâches auxquels il peut participer. L’EMGs quant à lui n’est pas invasif et plus sécuritaire [88], mais il ne permet pas l’accès à l’enregistrement valide des muscles profonds et enregistre une plus grande proportion d’unités motrices, ce qui diminue sa spécificité [8, 9, 89]. En effet, il est fréquent en EMGs d’obtenir une combinaison des signaux de deux muscles particulièrement lorsque leurs ventres musculaires se chevauchent (ex. les gastrocnémiens et le soléaire), ce qu’on appelle de la contamination (cross-talk) [89]. Il est donc important de prendre en considération la tâche à effectuer et le muscle à enregistrer afin de bien répondre à la question de recherche. Dans le cas de la présente expérience, l’EMGs sans-fil a été sélectionné en raison de la complexité de la tâche à effectuer. La coiffe des rotateurs est la structure la plus lésée à l’épaule. Toutefois, le seul muscle superficiel au niveau de la coiffe des rotateurs est l’infraépineux, un muscle pour qui l’EMGs a été démontré comme imprécis en raison du déplacement de l’électrode lors de la tâche, augmentant ainsi de façon considérable la contamination du signal [89].
Le deltoïde est un muscle superficiel recouvrant la jonction gléno-humérale et se séparant en trois chefs musculaires : antérieur (situé à l’avant de l’articulation), moyen (situé sur la partie latérale de l’épaule) et postérieur (situé à l’arrière de l’articulation). Ces chefs musculaires ont respectivement comme action principale, la flexion, l’abduction et l’extension de l’épaule [90]. Il est également reconnu que le deltoïde moyen contribue grandement à la réalisation du mouvement de flexion, mais que le deltoïde antérieur en est le principal agoniste et devrait ainsi générer plus d’activité musculaire que le moyen. Grieve et coll. ont aussi démontré que les principaux muscles affectés par le travail en élévation sont les muscles agonistes de la flexion et de l’abduction à
20
l’épaule [47]. Ensuite, comme la tâche étudiée dans le Chapitre 2 de ce travail (transport de charge) nécessite principalement de la flexion au niveau de l’épaule et des mouvements dans le plan sagittal, les chefs antérieurs et moyens du deltoïde ont été choisis. De plus, il a été démontré dans la littérature que le deltoïde présente une plus grande fatigabilité comparée aux autres muscles superficiels du cou et de l’épaule (ex. trapèze, scalène) [91]. Cette grande fatigabilité est utile afin de détecter plus rapidement la fatigue générée au niveau de la coiffe des rotateurs puisque ces muscles sont connus comme étant hautement fatigables dans l’ensemble des tâches en élévation ou nécessitant de la force aux membres supérieurs [92].
La prochaine section décrie brièvement les différents concepts utiles (physiologie du muscle et de la jonction neuromusculaire) afin de bien comprendre les données fournies par les capteurs et les variables extraites à partir de ces données.
2.2.2.1. Définition des concepts et variables [87, 93]
L’activité musculaire est en fait l’activation volontaire de certains groupes musculaires dans le but de réaliser une tâche spécifique. En EMG, elle est représentée par la différence de potentiel électrique détectée entre les électrodes placées à la surface de la peau ou dans le muscle d’intérêt.
Plus précisément, la plus petite unité fonctionnelle d’un muscle est nommée unité motrice. Par définition, une unité motrice représente le motoneurone (corps cellulaire, dendrites), l’axone et ses ramifications, ainsi que les fibres musculaires qu’il innerve. Lors d’une contraction musculaire, des échanges ioniques sont effectués au niveau cellulaire en raison de la perméabilité de la membrane. Un changement de polarité de la cellule suffisamment important entraîne alors ce qu’on appelle un potentiel d’action des unités motrices (motor unit action potential : MUAP), qui peut alors se propager le long des fibres musculaires, d’une unité motrice à l’autre. Lors d’une mesure EMG, l’ensemble des MUAP enregistrés sont superposés électriquement et est appelé signal brut (raw EMG) (voir exemple à la Figure 1).
21
Figure 1-2 : Signal EMG non traité (raw EMG)
Ce signal brut est par la suite filtré et normalisé pour mesurer l’activité musculaire réelle. À partir de ce signal, plusieurs variables peuvent être extraites afin de caractériser l’activité du muscle dans le temps, par exemple son niveau d’activité moyen. Deux concepts seront détaillés pour ce travail, 1) le root mean square (RMS) enveloppe, et le 2) pic d’activité EMG. Le RMS représente le carré de la puissance du signal, ce qui permet facilement de représenter les variations de contractions musculaires. Le pic quant à lui représente la valeur maximale à laquelle le muscle s’est contracté sur une certaine période de temps.
2.2.2.2. Limites et avantages des systèmes
Il est difficile, voire impossible, de reproduire parfaitement un signal EMG pour une condition donnée en raison de la grande variabilité présente même si toutes les recommandations sont suivies et que toutes les précautions sont considérées (ex. identifications du placement de l’électrode sur la peau pour placements ultérieurs). Afin de diminuer cette variabilité intra et inter-sujet, les données sont rapportées par rapport à une valeur de référence, le plus souvent une référence de force maximale pour chacun des muscles étudiés (MVC). Dans ce cas les données sont rapportées en % de la MVC du muscle. Finalement, afin de s’assurer de la qualité des données recueillies, une bonne préparation de la peau et un placement adéquat des capteurs sont nécessaires. C’est d’ailleurs pour cette raison que des lignes directrices ont été émises il y a quelques années pour l’EMGs [94].
22
Les systèmes d’EMG sans-fils ont des avantages substantiels sur les technologies filaires, puisqu’ils sont portables, légers, offrent plus de flexibilité quant à leur contexte d’utilisation, et sont souvent plus représentatifs de la vie de tous les jours [95]. Ils permettent également d’évaluer l’activité musculaire dans l’ensemble de la tâche (nécessite des mouvements dynamiques) et pas seulement lors de contractions isométriques comme il est le cas avec les dynamomètres manuels par exemple.
En somme, considérant l’étiologie multifactorielle des blessures musculosquelettiques et la subjectivité des données recueillies actuellement en clinique au niveau des facteurs de risque physiques, l’utilisation combinée de capteurs inertiels et d’un système d’EMG est une avenue intéressante pour améliorer les traitements ainsi que la prévention en emploi des blessures musculosquelettiques aux membres supérieurs. Toutefois, la majorité des études rapporte des résultats de validité ou des données d’EMG, mais pas les deux. Trois études seulement ont rapporté des données de cinématique et d’EMG combinées pour une tâche de manutention [96-98]. Cependant, les données de cinématique rapportées ont été collectées par un système de capture de mouvements par caméras, ne rendant pas les résultats transposables à un contexte réel d’emploi. De plus, les tâches présentées dans ces études n’étaient pas standardisées et ne permettent pas de déterminer les tâches plus à risque selon le niveau de demande physique.
Ensuite, le nombre important d’études sur la validité des capteurs inertiels publiées depuis la dernière synthèse de la littérature (sur toutes les articulations du corps) met en lumière le besoin d’une mise à jour des connaissances à ce niveau (Chapitre 1) [10]. De plus, peu d’études présentant des données à l’épaule ont été incluses dans cette revue systématique et la majorité d’entre elles présentaient des résultats au niveau de tâches simples [99-102], ce qui ne les rend pas généralisables à un contexte réel d’emploi. Ainsi, plus d’études présentant des données de tâches complexes à l’épaule ainsi que des données combinées de technologies portables pour la cinématique et l’EMG sont nécessaires afin d’éventuellement les utiliser en emploi (Chapitre 2).
23
Objectifs
L’objectif général de ce mémoire est d’évaluer la validité de technologies portables (système d’EMGs sans-fils et capteur inertiel) afin qu’elles puissent être éventuellement utilisées pour quantifier les demandes physiques d’un emploi.
Objectif 1 :
Effectuer une synthèse de la littérature sur la validité de critères et la fidélité de la mesure d’amplitude articulaire collectée par des capteurs inertiels pour chacune des articulations du corps.Objectif 2 :
Évaluer 1) la validité de critère d’un système de capteurs inertiels pour mesurer l’amplitude articulaire de l’épaule comparée à un système de capture de mouvements lors de mouvements isolés et lors de tâches de manutention et 2) la validité discriminante de la mesure d’activité musculaire aux deltoïdes antérieur et moyen collectée par un système d’EMGs sans-fil pour déterminer le niveau de demande physique à l’épaule lors de tâches de manutention.Hypothèse 1 : La mesure d’amplitude articulaire collectée par les capteurs inertiels sera caractérisée comme excellente pour les mouvements simples (r≥0.9 et RMSE≤10°) et comme bonne pour la tâche de manutention (r≥0.8 et RMSE≤15°).
Hypothèse 2 : Les mesures d’activité musculaire (RMS et pic d’EMG) au niveau des deltoïdes antérieurs et moyens collectés par le système d’EMGs sans-fil permettront de discriminer le poids soulevé et la hauteur à laquelle il est soulevé (p<0.05).
Hypothèse 2.1 :
Les mesures d’activité musculaire (RMS et pic d’EMG) du deltoïde antérieur permettront de mieux discriminer le niveau de demande physique à l’épaule que les mesures du deltoïde moyen.24
Chapitre 1: Validity and reliability of wearable
sensors for joint angle estimation: a systematic
review
Co-auteurs : Isabelle Poitras1,2, Frédérique Dupuis1,2, Mathieu Bielmann1,2, Alexandre
Campeau-Lecours1.3, Catherine Mercier1,2, Laurent J. Bouyer1,2, Jean-Sébastien Roy1,2
1 Centre for Interdisciplinary Research in Rehabilitation and Social Integration and Laval
University, Quebec City, Quebec, Canada
2 Department of Rehabilitation, Laval University, Quebec City, Canada
3 Department of mechanical engineering, Laval University, Quebec City, Canada
Publié le 31 mars 2019 Publié dans le journal Sensors
2.1 Résumé
Les systèmes de capture de mouvement sont considérés comme la mesure de référence pour le calcul de l’amplitude articulaire, toutefois leur utilisation est limitée à un contexte de laboratoire. Les améliorations récentes au niveau des systèmes de capteurs inertiels (IMU), leur portabilité et le nombre grandissant d’études sur ces systèmes justifient la réalisation d’une synthèse de la littérature sur le sujet. Le but de cette étude est de déterminer la validité et la fidélité des IMU pour la mesure d’amplitude articulaire en fonction et de l’articulation étudiée et de la complexité de la tâche effectuée. Méthodologie : Cinq bases de données ont été examinées. Deux évaluateurs indépendants ont effectué la sélection, l’évaluation de la qualité et l’extraction des données. Résultats : Quarante-deux études ont été incluses. Les résultats de validité sont plus faibles lors de tâches complexes et de l’évaluation des articulations du membre supérieur. Aucune conclusion claire ne peut être émise pour la fidélité. Conclusion : Les IMU peuvent être considérés comme un outil valide pour évaluer l’amplitude articulaire, mais plus d’étude sont nécessaires afin de standardiser les procédures d’utilisation.