An educational simulation tool for power system control and stability
Texte intégral
Figure
Documents relatifs
They were compared to classic detectors such as matched pairs t-test, unpaired t-test, spectral method, generalized likelihood ratio test and estimated TWA amplitude within a
les étudiants à l’AESS/Master à finalité didactique en biologie Marie-Noëlle HINDRYCKX Mélanie LASCHET Corentin POFFE Université de Liège.. A35 - DES IDÉES POUR LA
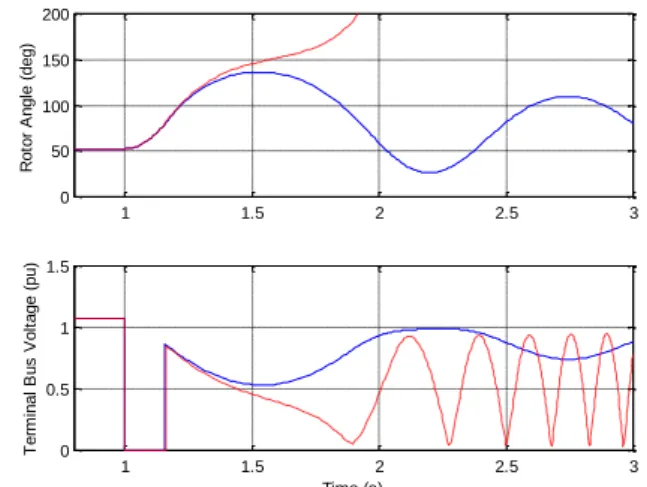
Coordinated Control of HVDC link, SVC (study case 2) In the second test, a simple test model with initial transfer level of 2GW and 500MW power on HVDC link (shown in
A trip of the central grid, trip of the PV system, and a three-phase short circuit isolating a generation and a load are simulated for stability studies of the hybrid power system
L’état de contrainte étant non uniforme, la résistance des assemblages a été exprimée par unité de longueur de soudure (N/mm). La rupture est observée dans la
• Industrial Engineering students had extensive process knowledge and basic lean exposure. • Terminology sometimes a barrier (IE
Ainsi, si l’exposé oral enregistré permet tout aussi bien aux étudiants d'apprendre ensemble, de diffuser le fruit de leur compréhension des contenus, soutenus par l'enseignant au
Plutôt que de voir des troubles et des symptômes à organiser en syndromes ou à additionner comme le fait pauvrement le DSM, A.Demaret repère des comportements et se pose la
