Relation corps-pieds lors de l’adaptation de la
marche pour l’enjambement d’obstacles
Mémoire
Louis-Philippe Dugas
Maîtrise en neurobiologie
Maître ès Sciences (M.Sc.)
Québec, Canada
© Louis-Philippe Dugas, 2015
Résumé
Le placement des pieds en fonction de la position du corps est un facteur clé dans l’équilibre postural nécessaire à la marche mais les adaptations de cette relation géométrique pied-corps lorsque l’environnement l’exige demeure incomprises. Dans cette étude, dix jeunes participants masculins sains marchaient au niveau du sol et devaient enjamber un obstacle qui pouvait soudainement se déplacer vers l’avant au point du contact de pied un ou deux pas avant son franchissement. Le but était de perturber la position de l’obstacle avec deux délais temporels afin de quantifier la position relative entre le corps, les pieds et l’environnement afin de démontrer l’importance géométrique nécessaire pour un franchissement d’obstacle sécuritaire. Les diverses conditions expérimentales ont permis de montrer que la distance horizontale entre l’obstacle et les pieds précédent le franchissement de l’obstacle est une variable assez flexible dans la réussite de cette tâche. Au moment des contacts talons avant et après le franchissement de l’obstacle, la distance relative entre le bassin et le pied nouvellement posé au sol était maintenue pour toutes les conditions. Les résultats présentés dans ce mémoire suggèrent une priorisation de maintenir une relation géométrique stéréotypée entre le pied supportant le corps et le bassin et cela peu importe les distances horizontales entre les pieds et l’obstacle.
IV
Abstract
Foot placement in relation to the body is known to be a key control factor for level walking but how that body-environment geometry plays in adapting locomotion is still not well understood. For this study, ten healthy young male adults walked on a flat surface as well as when stepping over an obstacle that could move away from them at the point of foot contact one or two steps just before clearance. The goal was to perturb the position of the obstacle with two time delays to quantify relative positioning between the body, feet and environment in order to reveal stereotyped postural geometry necessary for an obstacle crossing task. The various experimental conditions allowed us to show that the horizontal distance between the obstacle and the feet can be modified without influencing successful clearance. At heel contacts before and after the obstacle crossing, the relative distance between the pelvis and the new contacting foot was maintained for all conditions. Those results suggest that there is a priority for the relative geometric relationship between the supporting foot and pelvis over foot proximity for obstacle crossing.
Table des matières
Résumé ... III Abstract ... IV Table des matières ... V Liste des tableaux ... VII Liste des figures ... VIII Liste des abréviations ... IX Avant-propos ... X
Chapitre 1 : Introduction ... 1
1.1 Problématique ... 1
1.2 État des connaissances ... 2
1.2.1 Contrôle moteur ... 2
1.2.2.1 Neuro-anatomie associée au contrôle locomoteur ... 3
1.2.2.2 Contrôle locomoteur et les afférences visuelles ... 7
1.2.2.3 Contrôle locomoteur et paramètres spatio-temporels ... 8
1.2.2.4 Contrôle locomoteur et stabilité (CdM/CdP) ... 10
1.2.3 Locomotion entravée ... 12
1.2.3.1 Contrôle général du franchissement d’obstacle ... 12
1.2.3.3 Dégagement du pied minimal (DPM) ... 13
1.2.3.4 Placement des pieds ... 14
1.2.3.5 Géométrie du corps lors de l’enjambement d’obstacle ... 15
1.3 Rationnelle ... 19
1.4 Objectifs : ... 19
1.5 Hypothèses : ... 19
Chapitre 2 Méthodologie ... 20
2.1 Sujets ... 20
2.2 Cinématique du membre inférieur ... 20
2.3 Conception et positionnement de l’obstacle ... 21
2.4 Variables d’intérêts et traitement des signaux ... 22
2.5 Protocole ... 23
Chapitre 3 Perturbing obstacle position to reveal body-environment geometry fundamental to obstacle avoidance ... 24
VI
3.2 Article ... 25
Chapitre 4 Conclusion ... 43
4.1 Discussion ... 43
4.2 Limites de l’étude ... 45
4.3 Retombées cliniques et perspectives... 46
Références ... 48
Annexe A : ... 59
Caractéristiques des sujets recrutés ... 59
Annexe B : ... 61
Position des marqueurs et points de repères anatomiques numérisés ... 61
Annexe C : ... 63
Étapes de la procédure expérimentale ... 63
Annexe D : ... 66
Feuille de collecte de données ... 66
Annexe E : ... 68
Liste des tableaux
Annexes
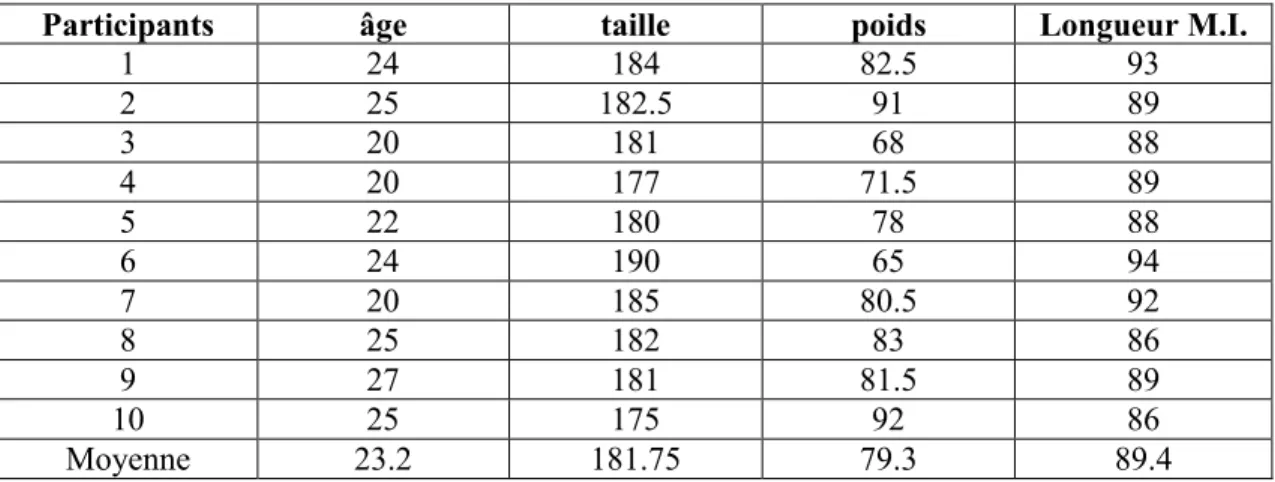
Tableau 1 : Caractéristiques des participants……….60
Tableau 2 : Positionnement des triades Optotrack pour chaque segment………...62 Tableau 3 : Repères anatomiques numérisés avec la sonde Optotrack…………...62
VIII
Liste des figures
Chapitre 3
Figure 1: Obstacle set-up. ………..40 Figure 2: Values of spatio-temporal variables. …...………...41
Figure 3: Schematic representation of distance between centre of mass and foot in
Liste des abréviations
AP Antéro-Postérieur
BdS Base de support
CdM Centre de masse
CdP Centre de pression
CPG Central pattern generator / générateur de patron central
COM Center of mass
COP Center of pressure
DPM Dégagement du pied minimal
EEG Électro-encéphalogramme
EM Early movement
EMG Électromyographie
LM Late movement
MEP Potentiel moteur évoqué
MFC Minimum foot clearance
MH Maximum height
ML Médio-latéral
MLR Mesencephalic locomotor region
MOS Margin of support
NM No movement
SLR Subthalamic locomotor region
SNC Système nerveux central
SRM Systèmes de référence des triades de marqueurs Optotrack
TMS Simulation magnétique trans-crânienne
TR Temps de réaction
X
Avant-propos
Je tiens tout d’abord à remercier mon directeur, le Dr. Bradford McFadyen, pour m’avoir accueilli dans son équipe de recherche et dirigé de façon consciencieuse. Il a su m’enseigner et me transmettre les principes fondamentaux de la recherche et m’a encouragé à développer une pensée critique et une vision de la recherche universitaire. De plus, je tiens aussi à remercier mon co-directeur, le Dr. Laurent Bouyer, pour ses judicieux conseils qui m’ont permis de progresser dans ma formation.
Merci à Guy St-Vincent pour son aide inestimable au cours des séances en laboratoire et lors de l’analyse des données. Un merci bien particulier à Steve Forest pour la conception de l’obstacle utilisé pour ce projet. Merci à Michaël Bertrand -Charrette pour son implication dans l’élaboration du protocole expérimentale et pour le support moral. Merci aussi à Isabelle Cossette pour son aide tout au long de ma formation et pour ces judicieux conseils. Merci également aux sujets qui ont si gentiment accepté de participer à mon projet de recherche.
J’aimerais remercier mes parents qui m’ont soutenu et encouragé tout au long de mon cheminement. Le niveau d’excellence qu’ils atteignent dans leur domaine respectif est une source de motivation quotidienne. Un remerciement particulier à mes cinq frères pour le support moral, les rires et les larmes et les moments dont on se souviendra toute notre vie.
Finalement, ce projet n’aurait pu être réalisé sans la précieuse contribution financière des fonds du Conseil de Recherche en Sciences Naturelles et en Génie du Canada (CRSNG) via les subventions de recherche des Drs Bradford J. McFadyen et Laurent Bouyer.
Chapitre 1 : Introduction
1.1 Problématique
Être en mesure de se déplacer dans son milieu et de s’y adapter de façon adéquate constitue une prémisse au bien-être et à la survie de pratiquement toutes les espèces vivantes sur terre. Chez l’humain, la marche constitue le principal outil de navigation de l’environnement, et ce dès le plus jeune âge. Ainsi, le fait de pouvoir explorer l’environnement est essentiel dans toutes les facettes du développement humain, mais présente aussi le défi de s’y adapter de façon constante et adéquate.
La marche a été décrite comme étant le résultat d’une combinaison alliant les générateurs centraux de mouvement rythmique, les commandes motrices volontaires et les rétroactions sensorielles (Patla, 1996). Chez l’humain en bonne condition physique, Rubenson et al. (2007) ont démontré que la marche à niveau, dans un environnement sans obstacle et sans distraction, représente une activité à faible coût énergétique qui est finement contrôlée par différentes structures du système nerveux central (SNC). Cependant, un tel environnement n’est pas représentatif des défis locomoteurs quotidiens auxquels les humains doivent faire face afin d’être autonomes. Parmi ceux-ci, on compte l’identification des obstacles réels et potentiels, et de fait, l’ajustement soit par le changement de direction ou l’enjambement de ces obstacles dans un délai temporel adéquat. Afin d’avoir des comportements adaptatifs adéquats, le système locomoteur doit tenir compte non seulement de l’environnement, mais de l’ensemble du corps afin d’éviter les collisions de chacun de ses membres et de sa tête avec les objets environnants.
Chez les sujets sains, plusieurs études ont caractérisé et quantifié les différents aspects de la locomotion à niveau et plus récemment la locomotion entravée (Patla et al. 1991a, 1991b, Patla et al. 1996, Chou et al. 1997, McVea & Pearson 2009, Lajoie et al. 2012, Heijnen et al. 2012, Loverro et al. 2013). Ces études ont mis en évidence le rôle de la vision et de l’attention, quantifié les paramètres cinématiques, cinétiques et la contribution
2
musculaire lors des différentes phases de la marche ainsi que quantifié les adaptations à la marche suite à divers changements des caractéristiques de l’obstacle.
Chou et al. (2001) se sont quant à eux intéressés à la relation existant entre le centre de pression plantaire (point distal) et le centre de masse du corps (point central) lors de la marche entravée, et ce, avec des obstacles de différentes hauteurs. Plus récemment, certaines théories de la stabilité dynamique ont été soulevées mentionnant la position du corps et des pieds (Redfern & Schuman 1994, Hof et al. 2005, Hof, 2008, Hak et al. 2013, Verrel et al. 2010, Bruijn et al. 2013). Cependant, plusieurs questions demeurent, à savoir quelle importance la relation entre le corps et les deux pieds jouent-elle dans le succès d’un enjambement d’obstacle. Il existe donc un besoin d’obtenir des résultats intégrant à la fois le positionnement du corps et des pieds lors du franchissement d’un obstacle utilisant des protocoles innovateurs.
1.2 État des connaissances
1.2.1 Contrôle moteurLe contrôle moteur fait référence aux différents mécanismes neuraux menant à l’exécution d’un mouvement particulier (Shumway-Cook & Woollacott, 2000). Il est généralement décrit comme étant l’intégration des aspects neurophysiologiques, comportementaux et physiques d’un mouvement choisi. En neurosciences, les scientifiques s’entendent pour distinguer deux types de mécanismes du contrôle moteur : le contrôle anticipatoire et le contrôle en rétroaction. D’abord, le contrôle anticipatoire fait référence à la schématisation interne du corps et de l’environnement à l’intérieur du SNC. Ces représentations permettraient aux différents segments du corps de s’ajuster en fonction du corps et de l’environnement dans un délai plus rapide qu’une correction du mouvement par rétroaction (Kawato, 1999; Schmidt & Lee, 2005). L’existence d’une telle modélisation interne permettrait, entre autres, une meilleure stabilité posturale lors de l’exécution des mouvements volontaires. Par exemple, les ajustements posturaux anticipatoires débutent avant le mouvement pour minimiser la perturbation posturale occasionnée par ce dernier. Lors de l’élévation des bras, Bouisset & Zattara (1987) démontrèrent que les forces
anticipées sont dirigées dans la direction opposée des forces de réaction associées à la réalisation du mouvement. Leur conclusion fut que leur fonction est donc de minimiser la perturbation occasionnée par le mouvement et l’optimisation de ce même mouvement. Cependant, les origines structurelles et la schématisation interne de cette modélisation sont considérées de manière différente dans la communauté scientifique (Kawato, 1999, Pearson, 2000, Vercher et al. 2003, Flanagan et al. 1999). Les deux modélisations le plus fréquemment discutées sont les « foward models » et les « inverse models ». Les « foward models » utiliseraient l’état actuel du système moteur en intégrant les commandes motrices, l’environnement ou toute interférence, pour prédire les conséquences sensorielles et la future position du corps. Les « inverse models » utiliseraient quant à eux la position désirée et la position actuelle du corps comme variable pour estimer et produire une commande motrice pour amener le corps dans la trajectoire désirée. Ces modélisations anticipatoires permettent une planification et une régulation du mouvement basée sur l’expérience antérieure.
Le contrôle en rétroaction est défini comme étant la correction apportée lorsqu’il y a une disparité entre le mouvement désiré et le mouvement produit en fonction de l’environnement. Ainsi, lorsque le système nerveux central envoie une commande motrice aux effecteurs, il reçoit des signaux des afférences sensorielles provenant du mouvement en cours et du milieu dans lequel ce dernier est produit. La comparaison des copies efférentes et afférentes va permettre l’ajustement du mouvement en cas de disparité entre le mouvement désiré et celui produit. (Pearson & Collins, 1993; Stephens & Yang, 1996). Cependant, de telles corrections vont prendre un certain délai à être produites et ce, dépendamment de si l’on initie un mouvement (150-250 ms) ou si l’on modifie un mouvement en cours tel que l’atteinte d’une cible avec le membre supérieur (100-140 ms) (Brenner & Smeets, 2003, Day & Brown, 2001, Day & Lyon, 2000, Kawato, 1999, Paulignan et al. 1990).
1.2.2.1 Neuro-anatomie associée au contrôle locomoteur
Jusqu'à récemment, la majorité des connaissances neuro-anatomiques fonctionnelles sur le contrôle locomoteur humain ont été obtenues indirectement et prennent origines dans
4
les travaux réalisés sur des modèles animaux. Ces derniers ont mis en évidence des relations structurelles du SNC dans le contrôle de la locomotion. La recherche sur les animaux et les humains a mené à l’identification de trois mécanismes pour le contrôle de la locomotion soit le contrôle supraspinal, périphérique, et le générateur de patrons central (« Central Pattern Generator » ou CPG). Rossignol et al. (2004) ont rapporté que chez les chats, la moelle épinière est capable de générer plusieurs aspects de la locomotion (rythmicité, patron d’activation). Cependant, au moment où le patron de base doit être modifié pour se diriger vers une cible « goal-directed » et/ou lorsque l’environnement crée un besoin d’adaptation de la marche, les afférences périphériques ainsi que les commandes supraspinales sont nécessaires. Drew et al. (2008) ont démontré l’influence de deux systèmes supraspinaux travaillant de concert afin de permettre les ajustements fins et précis nécessaires à une locomotion optimale. Le système médial procure le contrôle nécessaire aux ajustements posturaux et est principalement composé des voies réticulo- et vestibulo-spinales. Le système latéral a pour fonction le contrôle fin du mouvement, principalement dans le positionnement et le placement des pattes. Il est formé des voies rubro- et cortico-spinales. Le rôle des autres structures du SNC est moins bien défini en lien avec le franchissement d’obstacles et ne sera donc pas abordé dans le présent mémoire.
Systèmes supraspinaux
Les fonctions corticales ont pendant longtemps été considérées secondaires dans le contrôle de la marche puisque diverses espèces animales était en mesure de produire des patrons locomoteurs tout en ayant des lésions corticales. Cependant, certains auteurs (Armstrong, 1986, Armstrong, 1988, Drew, 1993) ont suggéré que chez le chat, la majeure contribution du cortex moteur (aire motrice primaire, secondaire et supplémentaires) était associée à l’adaptation du patron locomoteur de base dans un environnement irrégulier. Les sujets lésés étaient en mesure de produire des patrons locomoteurs relativement réguliers, mais étaient incapables de les adapter à des environnements plus difficiles. L’augmentation du niveau de difficulté relié à l’environnement était induit par une surface circulaire nécessitant de réduire la base de support ainsi que par une échelle (marche de barre en barre) créant un important défi pour le placement des pattes.
Plus récemment, Lajoie et Drew (2007) ont montré qu’une lésion du cortex pariétal postérieur chez le chat diminuait grandement leur habilité d’adaptation lors de la marche avec obstacles mobiles. Les stratégies de placement des pattes avant l’enjambement ainsi que la coordination entre les pattes avant et arrière était perturbée. Ces études appuient une littérature grandissante démontrant que l’intégrité du cortex moteur (et de ces projections descendantes) est nécessaire pour que les chats puissent modifier habilement leur patron locomoteur (Amos et al. 1990, Beloozerova & Sirota, 1993, 1998, Drew, 1993, Bretzner & Drew, 2005).
Toujours chez le chat, l’initiation et la coordination inter-membres de la marche serait aussi associée à d’autres structures supraspinales (mesencephalic locomotor region MLR, subthalamic locomotor region SLR) (Armstrong, 1986, Shik & al. 1969). Chez l’humain, des patients atteints de lésions vasculaires au niveau du mésencéphale dorsal présentent une ataxie à la marche et d’importantes difficultés dans l’initiation des patrons locomoteurs (Hathout & Bhidayarisi, 2005). Ainsi, l’intégrité de plusieurs structures supraspinales semble essentielle pour produire (déclencher) et adapter le mouvement locomoteur, principalement lorsqu’un contrôle d’une plus grande précision est nécessaire.
Le cervelet
Le cervelet est l’une des structures plurifonctionnelles en ce qui a trait à la locomotion. La locomotion dans un environnement complexe nécessite évidemment la capacité de pouvoir maintenir un équilibre dynamique ainsi que distinguer les dangers potentiels qu’ils soient statiques ou dynamiques. Morton & Bastian (2007) ont suggéré que des lésions au niveau cérébelleux entraînent une réduction de l’équilibre et une occurrence plus élevée des chutes durant la marche. Ces mêmes auteurs ont soulevé le rôle du cervelet dans le contrôle postural anticipatoire grâce à la comparaison possible des afférences sensorielles et des copies efférentes. De plus, le cervelet est impliqué dans la coordination intra et inter-membre principalement par le biais des structures médianes. Il est probablement aussi impliqué lors de la navigation dans un milieu complexe où les mouvements de la tête sont essentiels (Patla, 1996).
6
Contrôle automatique vs volontaire
Il est fréquemment présumé que les centres supraspinaux ont un impact plus grand dans la locomotion humaine comparativement aux mammifères quadrupèdes (Eidelberg et al. 1981, Gerasimenko et al. 2008, Gorassini et al. 2004, Guertin & Steuer, 2009). Les méthodes et les protocoles utilisés dans les modèles animaux sont simplement trop invasifs pour les reproduire chez l’humain. Ainsi, ces recherches soulevant les diverses fonctions, localisations, formations cellulaires et activation électro-chimique des CPGs ne peuvent que fournir des évidences indirectes de la réalité présente chez l’homme (Grillner, 2006, Guertin & Steuer, 2009, Guertin, 2014). Les fonctions des structures corticales peuvent être étudiés chez l’humain en utilisant certaines méthodes non-invasives telles que la simulation magnétique et électrique trans-crânienne, la cohérence EMG-EMG (électromyographie) et EMG-EEG (électroencéphalographie) ainsi que la neuroimagerie. Cependant, l’observation directe d’un CPG chez l’humain adulte n’est pas possible. Certaines évidences chez des patients atteints de lésion de la moelle épinière suggèrent la présence d’une partie de contrôle plus « automatique », qui travaillerait de concert avec le contrôle volontaire supra-spinal chez le sujet en santé (Gerasimenko et al. 2008, Nadeau et al. 2010, Field-Fote et al. 2012, Gorodnichev et al. 2012).
Il est donc généralement accepté que chez l’humain, un réseau neural sous-cortical produit un rythme locomoteur en déterminant une activation musculaire séquentielle stéréotypée. Cependant, l’initiation, la modification et la cessation des programmes moteurs permettant la marche reviendraient à des structures supra-spinales (Armstrong 1988, Bélanger et al. 1996, Guertin 2014). Les adaptations de la marche effectuées suite à une perturbation/modification de l’environnement peuvent donc grossièrement être divisées en deux catégories dépendant de l’origine de la perturbation (i.e. de la source du signal). Les modifications proactives proviennent du système nerveux central (système visuel) et dépendent de l’interprétation de l’environnement (p.ex., négociation d’un obstacle) tandis que les modifications réactives proviennent d’une activation nerveuse périphérique provoquée par l’environnement lui-même (p.ex., glissé sur une plaque de glace).
Les modifications réactives durant la marche sont essentielles afin de produire une adaptation rapide et efficace lorsque la situation environnementale l’exige, et plus particulièrement lorsque la stabilité et donc la sécurité sont menacées. Certains ajustements ont donc une origine réflexe spinale (Grey et al. 2004, Dietz & Sinkjaer 2012). Cependant, des mesures de latences d’activations soulève l’idée que ces ajustements peuvent sans doute être complétés ou améliorés par l’impact de voies nerveuses impliquant le tronc cérébral, le cervelet et/ou des structures corticales (Christensen et al. 2001).
Au niveau proactif, les études animales démontrent bien que lorsque la tâche locomotrice est plus compliquée, la modification du patron locomoteur est accompagnée par une décharge augmentée des neurones impliqués dans la voie corticospinale (Amos et al. 1990, Armstrong, 1986, Beloozerova & Sirota 2003, Drew et al. 2008). Chez l’humain, un environnement plus complexe implique nécessairement une planification plus exigeante et plus précise du mouvement locomoteur. Cependant, il n’existe présentement pas d’étude combinant le franchissement d’obstacles et la TMS. Des études réalisées lors de la marche sur tapis roulant ont montré des changements au niveau des potentiels moteurs évoqués (MEPs) (Schubert et al. 1998, Bonnard et al. 2002). Petersen et al. (2001) et Barthelemy & Nielsen (2010) ont aussi montré l’impact d’une stimulation magnétique trans-crânienne sur la suppression de l’activité musculaire (EMG) des jambes et des bras à la marche. Cependant, tel que soulevé par Barthélemy et al. (2011), beaucoup demeure à explorer quant au contrôle proactif de la marche et aux mécanismes corticaux.
1.2.2.2 Contrôle locomoteur et les afférences visuelles
La vision durant la marche est importante afin de tenir compte de l’état actuel de l’environnement ainsi que pour prévoir les changements potentiels dans ce dernier. Cependant, la manière dont les informations visuelles sont utilisées pour guider la locomotion humaine fait l’objet de divergences d’opinions. La théorie principale sur le sujet est basée sur des études réalisées autant avec le modèle humain qu’animal (Assaiante et al. 1989, Patla et al. 1996, Wilkinson & Sherk, 2005). Elle stipule que lorsque la locomotion est effectuée dans un environnement connu, de brefs échantillons visuels sont
8
suffisants pour guider la locomotion. Ces fréquences d’échantillonnage varient ainsi en fonction du niveau de difficulté présent dans l’environnement. Les changements de direction et les évitements d’obstacle augmentent, entres autres, la fréquence et la durée de ces périodes d’échantillonnages (Patla & al. 1996). Dans cette lignée, Patla & Vickers (1997) se sont intéressés aux endroits qui sont fixés par le regard durant une locomotion entravée. Deux principaux comportements du regard ont été soulevés. D’une part, le regard est dirigé vers le sol en conservant une distance constante entre le point fixé et le corps (« traveling fixation »). L’information visuelle recueillie durant ces périodes fournirait des informations sur le flux optique confirmant la vitesse et la direction du déplacement. Ces périodes de fixation étaient entrecoupées par de courts échantillonnages de la position de l’obstacle. Ils ont suggéré que ce comportement servait à intégrer la position de l’obstacle aux paramètres locomoteurs de chaque participant. Dans des situations où la difficulté et le risque sont augmentés tels que la marche d’un endroit surélevé à un autre, le regard reste sensiblement fixé sur la prochaine cible à atteindre (Hollands & Marple-Horvat, 1996, 2001).
1.2.2.3 Contrôle locomoteur et paramètres spatio-temporels
Une alternance de séquences d’activations musculaires complexes va générer des cycles de marche ayant des paramètres très stéréotypés (Winter 1987). Un cycle de marche est décrit comme une période durant laquelle un même évènement se reproduit. Il est généralement associé à la période allant du contact talon d’un pied jusqu’au contact talon subséquent de ce même pied. Le cycle de marche est divisé en deux grandes phases : la phase d’appui (60% du cycle) et la phase d’oscillation (40% du cycle). La phase d’appui est elle-même divisée entre la phase de simple appui et celle de double appui. Ainsi lorsqu’une jambe est dans sa phase d’appui, l’autre est dans sa phase d’oscillation. Lorsque les deux jambes sont au sol durant un cycle (20% du cycle complet), elles auront tour à tour, le rôle de propulser le poids du corps ou d’absorber l’énergie générée par ce dernier. Par exemple, lors du contact initial du talon, une première phase de double appui correspondant à 10% du cycle débute. La jambe arrière, toujours en contact avec le sol, est alors responsable de la propulsion du corps tandis que la jambe avant est alors responsable d’absorber de l’énergie pendant le transfert de poids du corps. Par la suite, la jambe ayant propulsé quitte
le sol et entre dans sa phase d’oscillation tandis que celle ayant absorbé devient la seule base de support. Puis le membre en phase d’oscillation touche le sol et la seconde phase de double appui (10%) se déroule (Perry 1992).
Lors de la marche, le corps est donc majoritairement en simple appui (80% d’un cycle) créant une demande importante au niveau du contrôle de l’équilibre (Winter et Eng, 1995). Cette demande accrue de stabilité semble pourtant facile à négocier pour de jeunes adultes en santé. Durant la marche à vitesse naturelle et sur une surface non accidentée, les adultes ont une grande régularité dans les paramètres spatio-temporels de la marche. On estime ainsi la vitesse de marche d’un humain sans déficit moteur à 1.41 m/s, avec une durée de pas de 536 ms, une longueur moyenne de 75 cm et une largeur de pas représentant 13% de la longueur de leur jambe (Winter 1983 Donelan et al. 2001). De plus, les mouvements angulaires au niveau de la hanche, du genou et de la cheville sont très bien documentés en fonction du % du cycle de marche (Winter 1983, Perry 1992). Ces mêmes auteurs notent cependant que chaque individu à un patron qui lui est propre entrainant certaines différences. Par contre, les caractéristiques angulaires semblent très robustes d’un humain à l’autre.
Les positions angulaires de la hanche, du genou et de la cheville auront ainsi chacune leur propre limitation en flexion et en extension selon le % du cycle de marche analysée. La position angulaire de la hanche variera entre 30o en flexion lors du contact talon ipsilatéral pour aller vers une extension de 10o (50% du cycle) pour terminer lors et vers une position en flexion de 35o (85% du cycle). Le genou et la cheville passe quant à eux par deux phases de flexion/extension durant un cycle de marche de manière à favoriser l’absorption de l’énergie de corps ainsi que la propulsion de ce dernier. Pour la marche non pathologique à vitesse confortable, le débattement angulaire moyen pour chaque articulation est d’environ 30o au niveau de la cheville, 70o au genou et 40o à la hanche (Perry, 1992)
10
1.2.2.4 Contrôle locomoteur et stabilité (CdM/CdP)
La régularité dans les paramètres spatio-temporels et cinématiques du mouvement locomoteur noté ci-dessus entraine inévitablement une relation stéréotypée entre le centre de masse (CdM) et le centre de pression (CdP) du corps. Dans une situation statique, afin d’être en équilibre, la projection verticale du CdM doit se retrouver à l’intérieur de la base de support (BdS) formée par tous les points en contact avec le sol. Pai et Patton (1997) ont soulevé l’importance du positionnement et de la vélocité du déplacement du CdM dans le contrôle de l’équilibre statique (sans changement de la base de support). En réalité, la situation statique a une composante dynamique créée par le déplacement du CdM même sans mouvement du membre inférieur. Ainsi, les auteurs ont inclus un facteur de vélocité dans le calcul de la stabilité (Pai & Patton, 1997). Ils ont utilisé l’appui unipodal comme base de support et ont calculé à l’aide d’un modèle de pendule inversé le déplacement possible du centre de masse qui n’engendrait pas de chute dans l’axe A-P.
Un calcul inspiré du modèle de pendule inversé fut utilisé pour mesurer la stabilité dynamique lors de la marche à la fois en antéropostérieur et en mediolatéral (Hof & al. 2005, Hof 2008, Lugade & al. 2011, Hak & al. 2013, Hak & al. 2013). Leur concept de marge de stabilité (« margin of stability, MoS ») est calculé comme la différence entre une estimation de la position antérieure du centre de masse (XCdM) et la mesure du centre de pression. Le XCdM correspond à la position du CdM, plus sa vélocité (vCdM) multiplié par un facteur défini par √𝑙/𝑔 où « l » est la longueur du pendule (dans les calculs représentés par la longueur de la jambe du participant) et « g » l’accélération gravitationnelle. Hof (2008) poursuivi en suggérant qu’une simple règle suffisait à expliquer l’équilibre dynamique à la marche. Lors du placement des pieds, le CdP devrait être à une certaine distance derrière et latéralement avec le XCdM. Il poursuit en suggérant qu’en réalité, une perturbation de la vélocité du CdM (DeltaV) pourrait être compensée par un changement de la position des pieds (CdP) équivalent à DeltaV/Omega 0 (où omega 0 est une constante) dans la même direction. Dans des études subséquentes, des adaptations de ces calculs (principalement au niveau du centre de pression) menèrent à plusieurs protocoles mesurant la stabilité dynamique et l’adaptabilité à la marche chez différentes populations (Lugade & al. 2011, Hak & al. 2013, Hak & al. 2013).
Parallèlement à ces mesures de stabilité, Bruijn & al (2009, 2010, 2013), avancèrent les concepts de robustesse et de performance de l’équilibre dynamique. La performance représente l’habileté d’une personne à retourner rapidement à un positionnement optimal suite à une perturbation. La robustesse reflète la force d’une perturbation qu’une personne peut subir sans tomber. Ainsi, ces calculs et ces théories des dix dernières années mettre de l’avant les concepts de positionnement du corps et des pieds afin de maximiser la stabilité et l’adaptabilité lors de la marche.
Toujours durant la marche sans obstacle, Redfern and Schumann (1994) ont proposé un modèle afin d’observer le placement et la vélocité des pieds au moment du contact du talon au sol, en relation avec la position du bassin. Ils ont montré que le placement du pied initiant le contact au sol est en fonction de la position de l’autre pied et du bassin pour optimiser la stabilité durant la marche. Leurs résultats suggèrent aussi que la vélocité du pied avant le contact avec le sol est minimisée en lien avec la position du bassin et indépendamment du membre préalablement en appui. Dans ce même article, ces auteurs ont aussi soulevé l’importance de regarder le positionnement pieds-bassin durant l’évitement d’obstacle, mais ne semblent pas avoir poursuivi leurs travaux sur le sujet. Leur modèle semble suggérer une évolution dans la relation entre le bassin et chacun des pieds tout au long du cycle de marche.
Plus récemment, Verrel et al. (2010) ont spécifiquement exploré la relation entre le positionnement pieds-bassin et les paramètres de marche durant la marche à différentes vitesses sur tapis roulant. Leurs résultats laissent voir que la covariance entre les mouvements angulaires du membre inférieur semble avoir une relation plus forte avec la position du centre de masse du corps relativement à la jambe avant. Ils proposent que cette variable soit une variable de contrôle prioritaire révélant du même coup l’importance d’établir une nouvelle base de support durant la marche à niveau. Ils soulèvent aussi l’idée que la longueur de foulée peut être une variable de contrôle davantage utilisée pour régulariser le mouvement locomoteur. Dans une étude subséquente, toujours selon leur
12
même mesure de stabilité dynamique, Verrel et al. (2012) ont montré que l’âge n’influence aucun paramètre en lien avec le centre de masse du corps dans la stabilisation de la marche. Ainsi, tel que mentionné précédemment, la marche non entravée peut être effectuée sans effort par la population saine en combinant des activations musculaires stéréotypées, des paramètres spatio-temporels constants et en conservant des relations relatives constantes entre les pieds et le corps. La locomotion entravée implique l’ajout de notions de sécurité et amène un questionnement supplémentaire sur les mécanismes de contrôle de l’équilibre dynamique vis-à-vis tous les types d’obstacles qu’un humain doit éviter.
1.2.3 Locomotion entravée
Les termes de pieds « lead » (1er pied à franchir l’obstacle) et « trail » (2ème pied à
franchir l’obstacle) ainsi que les termes « early » et « late » pour les conditions où l’obstacle était déplacé respectivement deux pas et un pas avant le franchissement de l’obstacle seront utilisés dans cette section. Ces termes sont communément retrouvés dans les ouvrages scientifiques et dans l’article présenté au chapitre 3.
1.2.3.1 Contrôle général du franchissement d’obstacle
L’environnement crée plusieurs demandes d’ajustements du patron locomoteur. Lorsqu’un obstacle est présent, qu’il soit statique ou dynamique, il est impératif de changer de direction (c’est-à-dire réorienter son CdM) pour passer à côté ou encore enjamber l’obstacle (Patla et al. 1996). Afin de franchir un obstacle, le placement du pied avant l’enjambement ainsi que le dégagement des pieds au-dessus de l’obstacle ont été identifiés comme des mesures pour la sécurité et la réussite du mouvement (Patla et al. 1991a, Chou & Draganich 1997, Heijnen et al. 2012). Lors d’une telle tâche, les informations visuelles recueillies lors des pas précédent le franchissement d’obstacle vont permettre d’intégrer des informations concernant les dimensions ainsi que les propriétés physiques de l’obstacle (Patla et al. 1996, Mohagheghi et al. 2004). Généralement, la stratégie adoptée consistera en une diminution de la vitesse de progression précédant l’obstacle ainsi que des modifications de la trajectoire des membres inférieurs et du placement des pieds (Patla et al
1991a, 1991b, Patla et al. 1996). Il a été rapporté que les adaptations locomotrices associées à l’enjambement d’obstacle peuvent commencer deux à trois pas avant le franchissement de l’obstacle. Lorsque nécessaire, la modification du placement du pied peut avoir lieu lors du pas précédent le franchissement de l’obstacle (Chen & al 1991, Patla & al 1991b, Patla & Rietdyk 1993).
Durant le franchissement d’obstacle, des ajustements posturaux anticipatoires ont aussi été rapportés pour permettre un contrôle optimal et sécuritaire du mouvement ainsi qu’une diminution de la vélocité du pied juste avant le contact du talon après le franchissement d’obstacle (McFadyen & Winter 1991, Winter et al. 1991, Zettel et al. 2002). En présence d’un obstacle, une stratégie favorisant la flexion du genou est utilisée pour l’enjambement de l’obstacle (McFadyen & Winter 1991; Patla & Prentice 1995). Cette activation musculaire résulte néanmoins en une plus grande flexion à la hanche et au genou. Le dégagement du pied au-dessus de l’obstacle est aussi permis grâce à une augmentation de la dorsiflexion au niveau de la cheville. Cependant, la localisation de l’obstacle affectera la flexion maximale au niveau de la hanche et de la cheville ainsi que la puissance musculaire mesurée à la hanche et au genou (McFadyen et al. 1993).
1.2.3.3 Dégagement du pied minimal (DPM)
Le passage des deux pieds au-dessus de l’obstacle est évidemment essentiel à la progression de la locomotion. Pendant plusieurs décennies, la mesure de dégagement minimal du pied s’est faite majoritairement en utilisant la distance verticale entre l’orteil et l’obstacle. Les résultats obtenus avec cette technique, tel que rapporté par Loverro et al. (2013), présentent une grande variabilité d’une étude à l’autre (6.8 à 18 cm) (Austin et al. 1999, Berard & Vallis 2006, Draganich & Kuo 2004, Lowrey et al. 2007, Lu et al. 2006, Patla & Rietdyk 1993, Sparrow et al. 1996). Dans leur expérimentation, Loverro et al. (2013) ont utilisé une technique qui impliquait la numérisation de 72 points sur chaque semelle en plus des points normalement utilisés lors des études mesurant le dégagement du pied (orteil, talon et 5ème métatarse). Leurs résultats montrent que le fait d’utiliser le bout du
pied surestime jusqu’à 65% la mesure du dégagement du pied pour le pied « lead », mais s’avèrent exacts pour le pied « trail ». Ils ont suggéré que les études désirant mesurer le
14
dégagement du pied minimal devaient considérer toute la semelle ainsi que sa déformation lorsque le soulier était porté par le participant.
1.2.3.4 Placement des pieds
Chou & Draganich (1998a, 1998b) ont mis en évidence l’importance du placement du pied « trail » en rapport avec l’obstacle. Lorsque le pied « trail » est placé plus proche de l’obstacle, ils ont rapporté une réduction de la flexion à la hanche, au genou et à la cheville provoquant un nombre plus élevé de contacts avec l’obstacle lors du passage de ce pied. De plus, plus le pied était placé proche de l’obstacle, plus la vitesse angulaire au niveau du genou augmentait et plus le temps écoulé entre le décollage du pied et le moment où le pied était au-dessus de l’obstacle était court. Leurs résultats montrent que la distance horizontale entre l’obstacle et le placement du pied n’affecte pas l’élévation de la hanche, mais que la hauteur de l’obstacle est linéairement corrélée à l’élévation de la hanche lors du passage du second pied au-dessus de l’obstacle. Patla & Greig (2006) ont observé le placement et la trajectoire du pied lorsque la vision était retirée à leurs participants durant l’approche de l’obstacle. Ils ont conclu que c’était le placement inapproprié des pieds devant l’obstacle qui créaient les contacts subséquents avec ce dernier et non pas l’élévation du membre inférieur.
Les données les plus récentes concernant le lien entre la distance horizontale entre l’obstacle et les pieds et le franchissement d’obstacle sont celles de Heijnen et al. (2012). Dans leur protocole, les participants devaient marcher à répétition au-dessus d’un obstacle d’une hauteur correspondant à 25% de la longueur de leur jambe, et ce, 250 fois. Les contacts furent en majorité avec le pied « trail » (92%). Pour la majorité des participants, les contacts étaient associés à une diminution linéaire du dégagement du pied au-dessus de l’obstacle en fonction du nombre d’essais réussis. Les autres contacts, y compris les deux survenus avec le « lead », peuvent être reliés à un placement du pied devant l’obstacle et/ou une élévation des pieds inappropriés.
Pour leur part, Chou et al. (2001) ont montré la régularité du placement du pied « trail » devant l’obstacle lorsque la hauteur de l’obstacle est modifiée (2.5, 5, 10 et 15% de
la longueur du membre inférieur). La distance entre l’orteil du pied d’appui et l’obstacle a varié entre 25.5 et 26.5 cm pour les quatre hauteurs d’obstacle. Ils ont ainsi soulevé l’importance du placement du pied devant l’obstacle dans le franchissement sécuritaire d’un obstacle. La conservation de la même distance du pied d’appui devant l’obstacle peut aussi s’interpréter comme étant un mécanisme de contrôle dynamique afin d’ancrer la base de support pour le mouvement d’enjambement de l’obstacle. On peut aussi s’interroger sur l’importance de la relation entre le corps et le pied d’appui durant une tache d’enjambement d’obstacle et ultimement, comment cette relation évolue lorsque le mouvement de franchissement d’obstacle doit être ajusté.
1.2.3.5 Géométrie du corps lors de l’enjambement d’obstacle
Si le contrôle des pieds avant et lors du franchissement de l’obstacle fut davantage étudié, le contrôle de tout le corps lors d’une telle tâche a fait l’objet de très peu d’études. L’enjambement d’un obstacle nécessite non seulement une modification du placement et de la trajectoire des pieds, mais aussi un contrôle dynamique précis du corps et une coordination avec la base d’appui du corps. Lors du franchissement d’un obstacle, plus l’obstacle est haut, plus le temps passé sur une jambe est augmenté et par le fait même, plus la demande au niveau de l’équilibre dynamique est importante (Patla & Rietdyk 1993, Chou & Draganich 1997, Chou et al. 2001, Hak et al. 2013). De plus, Chou et al. (2001) ont démontré que la hauteur de l’obstacle influence grandement le mouvement du centre de masse dans l’axe antéro-postérieur mais n’affecte pratiquement pas le mouvement du corps en médio-latéral. L’augmentation de la hauteur de l’obstacle résultait en un plus grand mouvement du CdM dans les axes AP et vertical. De plus, les distances maximales (AP) calculées entre le CdM et chaque pied lorsqu’ils étaient au sol en simple support étaient supérieures en fonction de la hauteur de l’obstacle. Cependant, tel que mentionné précédemment, le placement du pied d’appui devant l’obstacle ainsi que la longueur des pas demeuraient stables. Lorsque confrontés à un obstacle plus haut, leurs résultats suggèrent qu’un contrôle dynamique de tout le corps est nécessaire et ce même si la distance du pied d’appui avec l’obstacle demeure la même.
16
Loverro et al. (2013) ont quantifié la distance entre l’orteil du « lead » et du « trail » et le centre de masse du corps au moment du dégagement du pied minimal (DPM) des deux pieds. Lors du DPM du « lead », la distance entre le « trail » (en appui au sol) et le CdM était de 2.8 +/- 3 cm et celle entre le « lead » (au-dessus de l’obstacle) et le CdM était de 56.8+/- 6.3cm. Lors du DPM du « trail », le centre de masse du corps se retrouve entre les deux pieds. La distance entre le pied « lead » en appui et le CdM était de 27.3 +/- 7.9 cm tandis que celle entre le « trail » (au-dessus de l’obstacle) était de 35.3 +/- 8.1 cm. Leurs résultats suggèrent que lors de l’enjambement d’un obstacle statique, au moment du passage du premier pied, le CdM demeure très près de la base de support. Au franchissement du deuxième pied, le CdM est à mi-chemin entre les pieds en étant un peu plus près du pied au sol. La relation entre le CdM et le pied d’appui (trail) lors du franchissement du « lead » montre qu’au moment où le risque de contact avec l’obstacle est le plus élevé (DPM), le corps se retrouve sensiblement juste au-dessus de la base de support. Cette relation se veut possiblement un mécanisme de contrôle en cas de contact afin de retrouver un équilibre dynamique le plus facilement possible.
Une étude de Weerdesteyn et al. (2004) a comparé chez des sujets sains les temps de réaction (TR) dans l’initiation d’un mouvement volontaire de la main et du pied. Ils ont comparé ces temps avec ceux mis pour ajuster volontairement un pas pour enjamber un obstacle statique ainsi que l’ajustement d’un pas suite à la présence inattendue d’un obstacle à la marche sur tapis roulant. Le temps écoulé afin qu’un changement de trajectoire significatif du pied leur servît de mesure de temps lors des taches locomotrices. Leur résultat a mis en évidence que l’ajustement d’un pas face à un obstacle inattendu se faisait significativement plus rapidement (122 ms) que lorsque la correction face à l’obstacle était anticipée (205ms) et ce peu importe si les participants décidaient d’allonger ou de raccourcir leur pas afin d’enjamber l’obstacle. Ce comportement était aussi significativement plus rapide comparativement aux mouvements initiés à la main (218 ms) et au pied (179 ms). Ils suggérèrent que ce court TR ne pouvait simplement être expliqué par le dynamisme de la tâche d’enjambement et que cela suggérait l’implication de structures/voies sous-corticales. Une explication complémentaire à cette théorie est qu’une
stratégie d’adaptation en deux temps est déployée face à un obstacle inattendu. Cette stratégie en deux temps est davantage expliquée dans les prochains paragraphes.
Patla et al. (1991a) utilisèrent un protocole avec la marche à niveau dans lequel un second obstacle apparaissait de manière inattendue à la suite du premier obstacle et devait être enjambé dans le même pas. Le second obstacle pouvait apparaitre avec deux hauteurs différentes (2 et 8 cm). Il s’agissait donc pour les participants d’appliquer une stratégie d’allongement du pas afin de parcourir la distance nécessaire à enjamber les deux obstacles. Leurs résultats suggèrent que la trajectoire du pied était modifiée une première fois après 120 ms peu importe la hauteur du deuxième obstacle. Après un autre délai de 120 ms, une seconde déviation de la trajectoire était observée cette fois corrélée avec la hauteur de l’obstacle inattendu. Leur conclusion, tout comme celle de Weerdesteyn et al. (2004), est que lors d’un évènement inattendu pouvant affecter la sécurité du participant, une première adaptation est déclenchée par des voies sous-corticales, puis un ajustement de l’adaptation, possiblement cortical, est appliqué afin de compléter le mouvement en toute sécurité.
Ces résultats suggèrent donc que lors de tâche d’enjambement d’obstacle où l’évènement est inattendu, le corps réagit en maximisant la sécurité (la stabilité) en déployant une stratégie plus globale, puis favorise l’adaptabilité vis-à-vis l’obstacle. Ainsi, le contrôle locomoteur doit tenir compte non seulement de la coordination multi-articulaire, de l’amplitude et de la force générée (activation musculaire optimale) mais aussi du positionnement du corps et de ces segments dans l’espace en fonction d’un environnement donné. Ce positionnement relatif des segments distaux en fonction du corps (central) sera en grande partie responsable de la réussite d’un mouvement ou d’une combinaison de mouvement désirée.
Tel que mentionné précédemment, Patla et al. (1991a) et Weerdesteyn et al. (2004) ont utilisé des protocoles avec des obstacles mobiles. Cependant, le temps de réaction vis-à-vis l’obstacle et l’activation musculaire était leur centre d’intérêt. Ainsi, très peu d’informations sur la relation entre les pieds et le corps durant le franchissement d’obstacle mobile sont disponibles. Da Silva et al (2011), ont utilisé un obstacle mobile arrivant perpendiculairement aux sujets durant la marche. Les sujets devaient enjamber l’obstacle
18
dans une condition contrôle (obstacle statique) et ou l’obstacle arrivant lentement (1.07 m/s) et rapidement (1.71 m/s). Les paramètres de locomotion des deux pas précédent le franchissement de l’obstacle ainsi que du pas de franchissement du premier pied tels que la longueur et la durée des pas, la vitesse de marche, le placement du pied d’appui devant l’obstacle, le placement du premier pied après l’obstacle ainsi que le dégagement du premier pied au-dessus de l’obstacle furent mesurés. Le dégagement du pied au-dessus de l’obstacle augmenta seulement avec le mouvement rapide de l’obstacle. L’obstacle lent, provoqua davantage d’adaptation au niveau du placement des pieds. La distance entre le pied d’appui et l’obstacle devant l’obstacle fut significativement réduit tout comme la distance entre le premier pied et l’obstacle au moment du retour au sol après le franchissement. Des comportements anticipatoires reliés aux variables de vitesse et des paramètres des pas furent observés dans les deux conditions d’obstacle mobile.
Afin d’observer les mécanismes de contrôle de la stabilité dynamique, Hak et al. (2013) ont provoqué un comportement adaptatif durant la marche sur tapis roulant à l’aide d’un système de réalité virtuelle. Les participants, jeunes et sans déficits locomoteurs, devaient atteindre une cible avec leur genou, imitant en quelque sorte l’élévation de la jambe lors du franchissement d’un obstacle. Une diminution de la longueur des pas et de la vitesse de marche ainsi qu’une augmentation de la largeur des pas ont permis aux participants de conserver la même fréquence de marche. Ces adaptations ont permis le maintien de la marge de stabilité (MdS; voir section « Contrôle locomoteur et stabilité » pour définition). Cela implique une régularité dans le positionnement du pied, en fonction du corps et ce peu importe la vélocité du corps. Très peu d’informations sont disponibles à savoir comment une perturbation de l’environnement, et plus particulièrement à l’aide de l’obstacle, affecte la relation géométrique stéréotypée de tout le corps à la marche. La perturbation de l’environnement par le changement de position de l’obstacle est un moyen d’augmenter nos connaissances sur la constance dans la relation entre les pieds et le corps lorsqu’une adaptation locomotrice est nécessaire.
1.3 Rationnelle
La marche est une activité rythmique, complexe et contrôlée à plusieurs niveaux dans le SNC. La stabilité et l’adaptabilité de la locomotion permettent, en quelque sorte, de définir le niveau de succès de la marche. Il est donc important de comprendre le schéma corporel assurant la stabilité et l’adaptabilité face à l’environnement. Les études présentées dans la section 1.2.3 suggèrent qu’une combinaison de plusieurs facteurs serait importante pour le franchissement d’obstacles avec succès. Ces facteurs sont le placement du pied devant l’obstacle, l’élévation des pieds ainsi que la relation entre les pieds et le corps. On ne sait pas s’il y a une relation géométrique de base entre le corps et les pieds nécessaire peu importe l’exigence dynamique de l’environnement.
1.4 Objectifs :
Ce projet était exploratoire considérant, tel que mentionné précédemment, le manque de littérature sur le sujet, le protocole et l’appareillage expérimental.
L’objectif de l’étude est de comprendre la relation entre les pieds et le corps (CdM du bassin) dans les axes antéro-postérieur et médio-latéral pour éviter des obstacles statiques et avec perturbation de position à différents délais.
1.5 Hypothèses :
Basée sur la recension des écrits, l’hypothèse est qu’il y aura une relation stéréotypée entre les pieds d’appui et le corps et que celle-ci sera présente pour le franchissement d’obstacle peu importe la perturbation d’obstacle et le délai.
20
Chapitre 2 Méthodologie
L’article scientifique présenté au chapitre trois inclut la méthodologie utilisée dans ce projet. Afin de diminuer la redondance avec l’article scientifique, la plupart des éléments subséquemment mentionnés ne seront pas traduits dans le présent chapitre. Ce dernier se veut donc un complément d’information méthodologique et est appuyé par les annexes A à F. Ces annexes comprennent une description détaillée des participants, le certificat d’éthique, une illustration du montage expérimental, la liste de procédures expérimentales ainsi qu’une copie de la feuille de collecte.
2.1 Sujets
Dans l’annexe B, le tableau 1 présente les principales caractéristiques physiques des 10 sujets ayant participé à cette étude. Les participants étaient tous masculins et devaient être âgés entre 18 et 35 ans et être complètement naïfs de la tâche à exécuter. Ils devaient, de manière auto rapportée, être en mesure de marcher une demi-heure à une vitesse confortable sans éprouver de fatigue majeure. Les participants ont été exclus s’ils ont (auto rapporté) des troubles neurologiques ou musculo-squelettiques pouvant affecter leur capacité de marcher. De plus, les personnes avec une taille inférieure à 174 cm ou supérieure à 190 cm ont été exclues de ce projet dû à la hauteur fixe de l’obstacle afin de contrôler la variabilité dans l’exigence physique demandée par la tâche d’enjambement.
2.2 Cinématique du membre inférieur
Les données cinématiques présentées dans ce projet ont été obtenues avec un système de mesure tridimensionnelle Optotrack Certus (NDI, Canada). Ce système est opto-électrique et fonctionne avec un rayonnement infrarouge qui permet la capture du mouvement. Des triades (trois marqueurs apposés de manière non-colinéaire) étaient installées au niveau du tronc et du bassin ainsi que de manière bilatérale sur les pieds, les jambes et les cuisses. Les marqueurs étaient positionnés de manière à ce qu’ils soient le plus facilement détectables par les caméras. Ces marqueurs émettent une lumière infrarouge qui est captée par des barres de capteurs installées dans le laboratoire. Dans ce montage, quatre barres contenant chacune trois capteurs photosensibles étaient installées afin d’avoir un champ de détection optimal. Ces capteurs, positionnés de manière triangulaire,
permettent la transformation des signaux lumineux infrarouges captés en signaux électriques.
La calibration du laboratoire se fait en collectant un nuage de points communs aux caméras et ensuite en créant un alignement selon un système d'axes voulu. Pour le participant, il se place dans une position anatomique de référence statique et on collecte les marqueurs (pendant une seconde) pour créer les systèmes de référence des triades de marqueurs (SRM) de chaque segment. Après, les points anatomiques sont sondés pour chaque segment en référence au SRM du segment (voir la description en chapitre 3 et en annexe D). Pour chaque triade de marqueurs, un calcul de vecteurs unitaires orthogonaux était obtenu pour former le référentiel local de la triade de marqueurs. La position des repères anatomiques ainsi que des semelles étaient obtenues par le biais d’une sonde ayant 4 marqueurs actifs fixés dans un plan et ayant son propre référentiel
Les points numérisés au niveau des semelles étaient rapportés à la triade apposée au niveau du pied. Le participant portait ces souliers afin de tenir compte de la déformation de la chaussure par le pied. Par des matrices de rotation, le logiciel transformait la coordonnée du point numérisé, du référentiel de la sonde dans celui de la triade. Les calculs de dégagement du pied minimal (minimum foot clearance) par rapport à l’obstacle ont été réalisés à l’aide d’un programme maison. D’une part, la distance horizontale minimale est calculée entre l’obstacle et chaque point sondé sur la semelle nous fournissant le moment où chaque point est au-dessus de l’obstacle. Puis, on obtient à quel endroit sur l’obstacle (ML) ce dégagement du pied ce produit. Finalement, pour chaque instant ou chaque point se trouve au-dessus de l’obstacle, la distance verticale est calculée pour obtenir la valeur du dégagement du pied minimal.
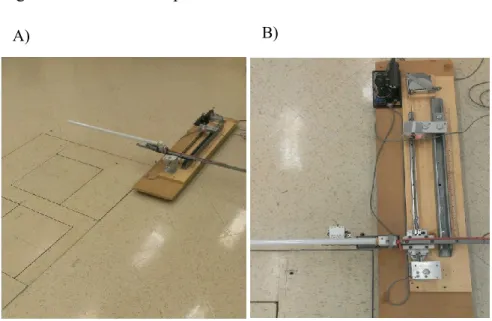
2.3 Conception et positionnement de l’obstacle
L’obstacle est conçu avec un tube de plastique semi-rigide formant un obstacle cylindrique ayant une longueur d’environ 60 cm et un diamètre de 2 cm. Le tube était attaché à la portion mobile du module (servant au déplacement de l’obstacle) par le biais d’un élastique. Cela permettait sa séparation du module si un contact important survenait
22
avec les participants. L’obstacle se déplaçait le long d’un rail avec roulement à billes linéaire attaché à ressort. La portion mobile était bloquée par un loquet pivotant actionné par un solénoïde contrôlé par un signal électrique contrôlé par un ordinateur et associé avec l’application d’une force par le participant préalablement défini de plus de 20N sur une des deux plateformes de force. L’activation du solénoïde libère le mouvement de l’obstacle dans la direction de la marche par la force du ressort.
La position de l’obstacle et des plateformes de force dans le montage expérimental était fixe pour tous les participants. De par l’homogénéité physique de nos participants, seulement la position de départ était modifiée afin que le participant marche sur les deux plateformes (2 pas avant l’obstacle, 1 pas avant l’obstacle) tout en ayant une marche naturelle en arrivant devant l’obstacle. Les participants n’étaient pas informés qu’ils devaient marcher sur les plateformes ou que la distance entre les pieds et l’obstacle était mesurée.
2.4 Variables d’intérêts et traitement des signaux
Le positionnement relatif des pieds et du corps a été calculé en utilisant les positions absolues de chaque élément à huit moments choisis dans les axe AP et ML. Nous avons fait les mesures en considérant le centre de masse du bassin comme étant notre point proximal. Ce point servait à faire les références au corps et à sa relation avec les pieds. Il était calculé à partir de la position moyenne entre les épines iliaques antéropostérieur (2) et postérieur (2) (figure 3, chapitre 3). Le centre de masse des pieds était obtenu à partir d’une distance établie grâce aux points anatomiques sondés des malléoles externes et des têtes des cinquièmes métatarses. Les autres mesures présentées dans le chapitre trois concernent le placement des pieds avant, au-dessus et après le franchissement de l’obstacle ainsi que la longueur des pas (figure 2, chapitre 3).
Les variables d’intérêts pour ce projet, hormis celle concernant la distance relative pieds-bassin, furent déterminées en fonction de la littérature des dernières décennies ainsi qu’avec l’analyse des participants pilotes (3 sujets). Elles consistent en l’élévation
maximale du pied ainsi que son passage au-dessus de l’obstacle, la distance horizontale entre les pieds et l’obstacle ainsi que la longueur des foulées. Tous les signaux cinématiques furent filtrés avec un filtre Butterworth passe-bas de quatrième ordre (zero-lag) utilisant une fréquence de coupure de 6Hz. Les moyennes et les écarts-types pour chaque variable furent calculés et analysés avec une ANOVA à un facteur incluant une correction post-hoc « Bonferroni » afin de comparer entres elles les valeurs sans mouvement et avec mouvement. Le mouvement de l’obstacle pouvait être déclenché soit deux pas (« early ») ou un pas (« late ») avant le franchissement de l’obstacle.
2.5 Protocole
Une fois les calibrations et les installations complétées, la position de départ pour tous les essais subséquents était établie tel que détaillé dans la section 2.3. Un premier bloc de cinq essais était réalisé durant lequel le participant savait que l’obstacle ne pouvait pas être déplacé. Ces essais servaient à la fois à établir les paramètres de base de la locomotion entravée de chacun afin de s’assurer que la possibilité du mouvement de l’obstacle dans le bloc d’essai subséquent ne perturbe pas ces variables. Ces essais servaient aussi à établir l’emplacement de l’obstacle lorsque sa position serait changée afin de perturber le placement du pied « lead » suite au franchissement de l’obstacle. Durant le calcul de cet emplacement et la rectification du module de l’obstacle, le participant était accompagné dans un laboratoire adjacent pour effectuer des tests d’équilibre et remplir le questionnaire « Waterloo footedness questionnaire » afin de déterminer sa préférence podale (annexe G). À son retour dans le laboratoire principal, le participant était informé que l’obstacle pouvait désormais se déplacer sans aucune autre indication concernant le moment et l’endroit du déplacement. Ce bloc contenait en moyenne 45 essais incluant dix à douze essais avec mouvement d’obstacle. Un dernier bloc de 5 essais était réalisé où le participant savait que l’obstacle ne pouvait être déplacé. Les données des premiers et derniers cinq essais ne sont pas présentés dans ce mémoire, mais ont été traitées et observées afin de s’assurer que le comportement de base du sujet n’ai pas été affecté par le protocole de perturbation.
24
Chapitre 3
Perturbing obstacle position to
reveal body-environment geometry fundamental to
obstacle avoidance
Le présent chapitre comporte un article scientifique à soumettre à la revue Experimental Brain Research.
3.1 Résumé
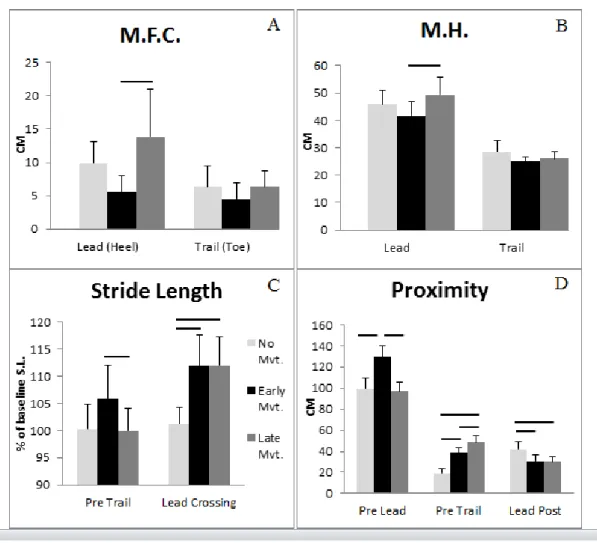
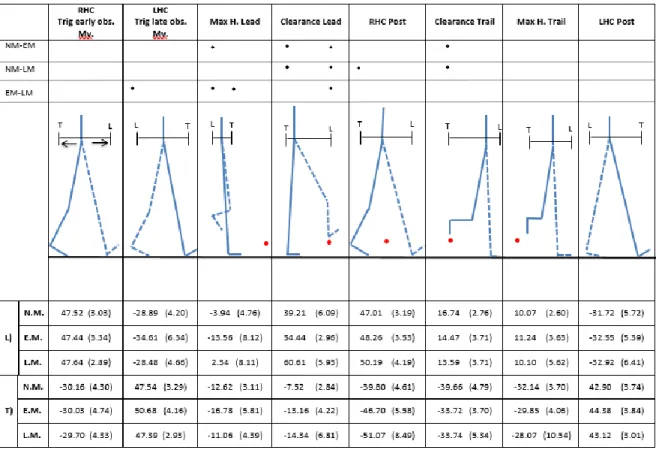
Le placement du pied en fonction de la position du corps est reconnu comme une variable de contrôle importante durant la marche non entravée. Cependant le rôle de la géométrie entre le corps et l’environnement dans l’adaptation aux contraintes environnementales n’est pas clairement établi. L’objectif de cette étude était de vérifier s’il existe une relation géométrique stéréotypée entre les pieds, le bassin et l’environnement dans une tâche de franchissement d’obstacle avec perturbation. Dix jeunes adultes sains devaient enjamber un obstacle d’une hauteur de 19 cm avec leur jambe droite en premier. L’obstacle pouvait demeurer dans sa position ou se déplacer vers l’avant à une distance équivalente à un pas. Ce déplacement était déclenché au contact talon un ou deux pas avant le franchissement de l’obstacle. La distance verticale minimale entre le pied et l’obstacle lors du franchissement de l’obstacle ainsi que la proximité (distance horizontale) entre le pied et l’obstacle avant et après le franchissement étaient mesurées. La position relative du bassin et des pieds fut mesurée à quatre moments : contact du talon avant et après le franchissement, la hauteur maximale du pied, et le moment de dégagement du pied minimal étaient également mesurées. Le déplacement de l’obstacle a modifié significativement la proximité entre les pieds et l’obstacle avant et après le franchissement de l’obstacle. Le dégagement du pied minimal était moins perturbé pour le deuxième pied comparativement au premier. Dans le positionnement relatif des pieds et du bassin, toutes les différences significatives furent observées dans l’axe antéropostérieur. La distance entre le bassin et le nouveau pied en contact avec le sol (pied devant le corps) fut maintenu à travers les conditions expérimentales créant une plus grande distance avec le pied arrière. Ces résultats suggèrent qu’il s’établit une priorisation pour de maintenir une relation géométrique stéréotypée entre le pied supportant le corps et le bassin au-delà du maintien d’une distance horizontale entre l’obstacle et les pieds.
3.2 Article
Perturbing obstacle position to reveal body-environment geometry fundamental to obstacle avoidance
Dugas, L-P1,2, Bouyer, LJ1,2, McFadyen, BJ1,2
1Center for Interdisciplinary Research in Rehabilitation and Social Integration (CIRRIS),
IRDPQ, Quebec City, Canada
2 Faculty of Medicine, Laval University, Quebec City, Canada
Corresponding Author: Bradford J. McFadyen, PhD CIRRIS-IRDPQ
525 Hamel, Québec, Qc, Canada, G1M 2S8 Email: brad.mcfadyen@fmed.ulaval.ca
26
Abstract:
Foot placement in relation to the body is known to be a key control factor for level walking. Humans, however, also have to adapt their locomotor patterns to the environment. The role that body-environment geometry plays in adapting locomotion is still not well understood. This study tested the hypothesis that a stereotypical geometrical relationship must exist between the feet, pelvis and environmental obstruction in order to perform an obstacle crossing task. Ten healthy young adults stepped over an obstacle 19 cm high with their right leg leading. The obstacle could be static (no-movement condition) or advanced one step ahead at either lead (early detection) or trail (late detection) foot contact prior to clearance. This mobile obstacle forced an adaptive reaction requiring the reorganization of body-environment geometry. Minimum foot clearance over the obstacle, and foot-obstacle horizontal proximity before and after clearance, were measured along with the relative position of the pelvis and both feet at four moments: heel contact before and after crossing the obstacle (HC), maximum foot height and clearance. Obstacle movement significantly changed proximity before and after crossing. Clearance was less affected for the trail foot as compared to the lead foot and was correlated to maximum height for each foot. For relative pelvis-feet positioning, significant differences were found only in the anterio-posterior direction. When an adaptation was made before or during the crossing stride, at both heel contact moments, the pelvis preserved its relative distance with the newly contacting foot (i.e. foot in front) while creating a greater distance with the unloading/swing foot. This study suggests a priority for the relative geometric relationship between the supporting foot and pelvis over foot proximity during obstacle crossing.