Analyse de la modélisation et le contrôle d’une pompe piézoélectrique
Texte intégral
Figure
![Figure I-11: Quartz.[1]](https://thumb-eu.123doks.com/thumbv2/123doknet/2942367.79302/26.892.210.738.575.927/figure-i-quartz.webp)
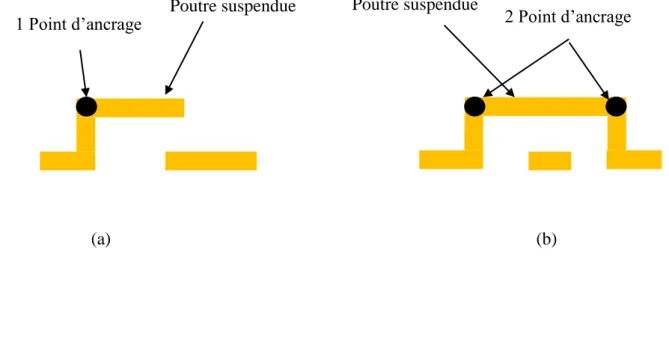
![Figure II-2: Lames uni morphes. [16]](https://thumb-eu.123doks.com/thumbv2/123doknet/2942367.79302/35.892.182.737.518.845/figure-ii-lames-uni-morphes.webp)
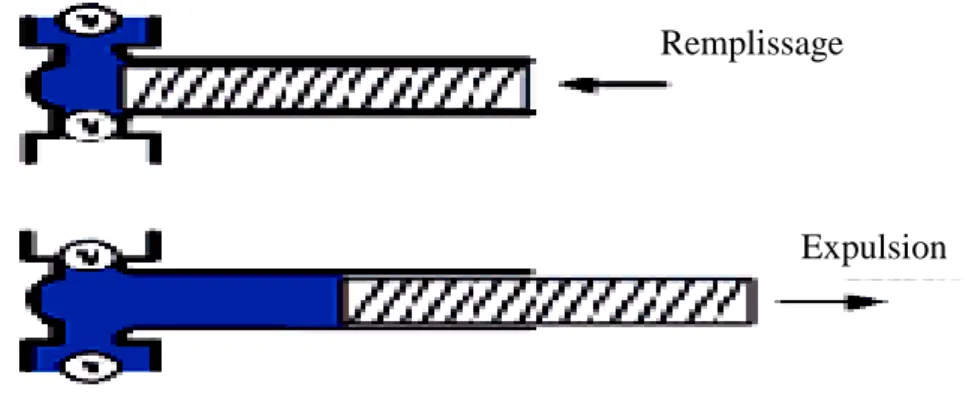
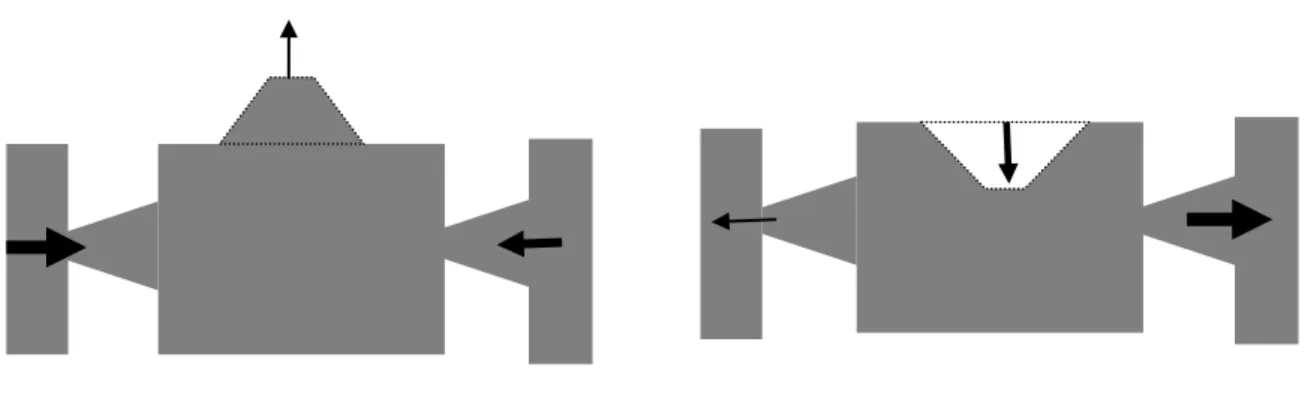
![Figure II-5: Micro-pompe piézoélectrique. [19]](https://thumb-eu.123doks.com/thumbv2/123doknet/2942367.79302/37.892.186.794.766.1040/figure-ii-micro-pompe-piézoélectrique.webp)
![Figure II-14: Schéma bloc du système de diffusion de médicaments [25].](https://thumb-eu.123doks.com/thumbv2/123doknet/2942367.79302/47.892.171.788.151.487/figure-ii-schéma-bloc-système-diffusion-médicaments.webp)
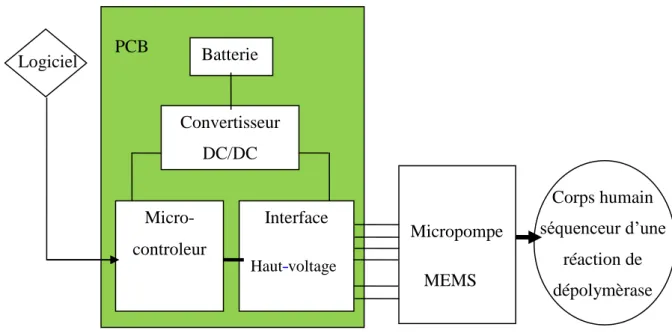
![Figure II-16: schéma block de la livraison de l'insuline [27].](https://thumb-eu.123doks.com/thumbv2/123doknet/2942367.79302/50.892.87.837.525.849/figure-ii-schéma-block-de-livraison-de-insuline.webp)
Documents relatifs
Les résultats obtenus avec EOLE sont comparés d'une part avec un modèle de type potentiel [1], reconnu pour sa grande précision lorsque la surface libre de la vague n'est pas
L’article rend compte de résultats issus d’une étude qualitative portant sur l’analyse des controverses, c’est-à-dire des positions divergentes des acteurs de l’éducation et
Bien que les résultats obtenus ne valident que partiellement notre hypoth èse, celle-ci postulant que la façon dont l 'i nformation est traitée dans sa dimension
Performances classifieur neuro-flou(CLNF) en %.. Le tableau 3 présente les résultats obtenus pour la classification des ESV, comparés avec les résultats de quelques autres travaux
Cependant, comparés à des résultats antérieurs (tableaux VIII. Une partie de 1 'explication réside dans la grande hétérogénéité botanique des échantillons
Afin d’estimer les valeurs centrales des a priori, le modèle hydraulique sera paramétré avec des valeurs de paramètres réalistes, et les résultats seront comparés à des
A travers les résultats obtenus dans ce type de matériau et l’analyse des scalogrammes, l’approche mise en œuvre basée sur une modélisation du bruit de structure et un
Les résultats obtenus avec des interfaces injectantes symétriques ou non et des interfaces bloquantes ont été comparés.. Des expressions analytiques des différentes
