Réalisation d’un réseau linéaire de capteurs
acoustiques pour la localisation de sources sonores
distordues
Mémoire
Mathieu Gallichand
Maîtrise en génie électrique
Maître ès sciences (M.Sc.)
Québec, Canada
Résumé
Ce mémoire présente les algorithmes et le matériel utilisé dans le cadre de ce projet de localisation de sources sonores affectées par de la distorsion. Le système d’acquisition conçu est un réseau linéaire de capteurs acoustiques. Il permet l’enregistrement de données empiriques et offre une flexibilité dans le choix des paramètres, entre autres l’emploi d’un maximum de 12 capteurs, un espacement flexible entre ceux-ci et une amplification à gain variable. La propagation de l’onde sonore dans l’air est affectée par l’inhomogénéité du milieu, ce qui provoque la distorsion des fronts d’onde. Des algorithmes classiques, qui ne tiennent pas compte de la distorsion, et d’autres récupérant les fronts distordus sont utilisés pour localiser les sources. L’effet de cette distorsion sur la localisation est ainsi observé. Les signaux monochromatiques, utilisant les différences de phase, comme ceux d’impacts, exploitant les différences des temps d’arrivée, sont localisés.
Abstract
In this project, we present the algorithms and the hardware used to locate acoustic sources affected by distortion. The designed acquisition system is a linear array of acoustic sensors. It allows the recording of experimental data and is flexible for the choice of its parameters. Among others, the system uses up to 12 sensors, a variable spacing between them and variable gain amplification. The propagation of the sound waves in air is affected by the environment inhomogeneity, which causes wavefront distortion. Classical algorithms, which don’t take into account the distortion, and other algorithms, recovering distorted wavefronts, are used to locate sources. The effects of wavefront distortion are then observed. Monochromatic signals, using the phase differences, and impact signals, using time difference of arrivals, are both located.
Table des matières
Résumé iii
Abstract v
Table des matières vii
Liste des tableaux ix
Liste des figures xi
Liste des symboles xv
Liste des sigles et acronymes xvii
Remerciements xxi 1 Introduction 1 1.1 Objectifs. . . 2 1.2 Plan du mémoire . . . 3 2 Matériel 5 2.1 Environnement de mesure . . . 5 2.2 Choix du matériel . . . 5 2.3 Fonctionnement du matériel . . . 9 2.4 Montage complet . . . 14 2.5 Acquisition de données . . . 14 2.6 Conclusion . . . 17
3 Modèles et milieu de propagation 19 3.1 Réseau de capteurs . . . 19
3.2 Modèle de propagation . . . 23
3.3 Milieu de propagation inhomogène . . . 26
3.4 Conclusion . . . 30
4 Présentation des algorithmes 31 4.1 Traitement initial . . . 31
4.2 Algorithmes de localisation . . . 35
4.3 Algorithme MUSIC. . . 35
4.5 Localisation d’un impact. . . 47
4.6 Conclusion . . . 52
5 Analyse des résultats 55 5.1 Localisation d’angle . . . 56
5.2 Localisation d’angle et de distance . . . 61
5.3 Comparaison des algorithmes . . . 72
5.4 Conclusion . . . 78
6 Pistes de solutions aux problèmes de la distorsion 79 6.1 Pour une source individuellement . . . 79
6.2 Données communes à plusieurs sources . . . 91
6.3 Conclusion . . . 96
7 Conclusion 97 7.1 Travaux futurs . . . 99
A Schéma du circuit d’amplification 101 B Ajustement du matériel 105 C Installation logicielle 109 C.1 Installation et configuration . . . 109
C.2 Script et fonctions . . . 110
C.3 Sauvegarde des données . . . 110
C.4 Ordre de branchement des modules . . . 111
C.5 Conclusion . . . 111
Liste des tableaux
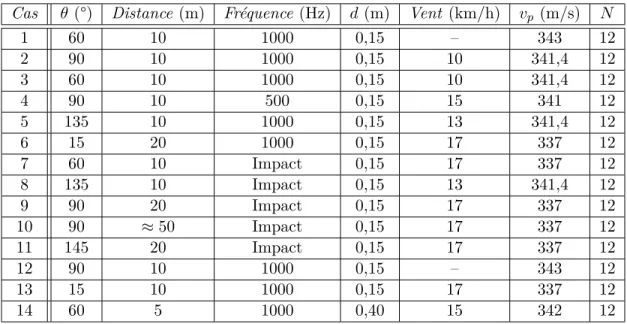
5.1 Paramètres des cas utilisés pour l’analyse des résultats, simulations et données
expérimentales . . . 57
5.2 Résultats de la localisation des signaux d’impacts . . . 60
5.3 Résultats de simulation du cas #1, 200 essais . . . 65
5.4 Résultats de simulation du cas #12, 200 essais . . . 65
5.5 Résultats de la localisation en deux dimensions des signaux d’impacts . . . 71
Liste des figures
2.1 Tige de support des microphones . . . 6
2.2 Circuit d’amplification des signaux . . . 7
2.3 Module d’acquisition (convertisseur analogique-numérique) . . . 8
2.4 Parcours du signal d’un capteur. . . 9
2.5 Forme du filtre RC passe-haut . . . 10
2.6 Structure générale du filtre passe-bas . . . 10
2.7 Schéma du filtre passe-bas Sallen–Key réalisé . . . 11
2.8 Montage suiveur de l’amplificateur opérationnel . . . 12
2.9 Schéma du circuit de l’amplificateur à gain fixe . . . 12
2.10 Circuit d’alimentation des microphones . . . 13
2.11 Montage complet typique du matériel pour la prise de mesures expérimentales 15 2.12 Montage typique du matériel utilisant une seule paire de tiges supportant les capteurs . . . 16
2.13 Géométrie de la prise de mesures expérimentales . . . 16
3.1 Front d’onde capté par un réseau linéaire uniforme . . . 21
3.2 Front d’onde courbe sur un réseau linéaire . . . 25
3.3 Impact de l’endroit où se situe la perturbation du milieu . . . 28
3.4 Échantillons de la phase (φ) d’un front d’onde distordu, source à 10 m, θ = 88,5◦ 29 4.1 Chaîne de traitement initial des signaux reçus . . . 32
4.2 Résultats de l’algorithme Qu en simulation . . . 43
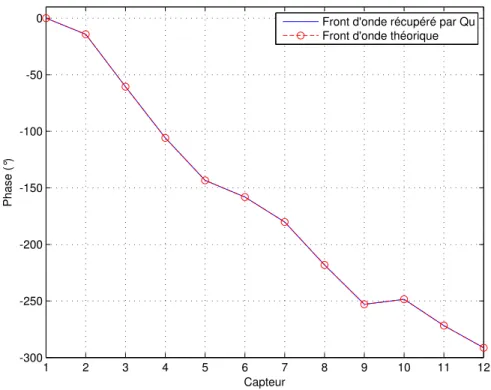
4.3 Comparaison entre le front d’onde récupéré de l’algorithme Qu et le front d’onde théorique . . . 44
4.4 Résultats de l’algorithme Qu avec des données expérimentales, 3 itérations . . 45
4.5 Front d’onde récupéré par l’algorithme Qu avec des données expérimentales . . 46
4.6 Exemple de localisation d’une source à partir du front d’onde . . . 47
4.7 Détermination du moment de l’impact par la dérivée du signal . . . 48
4.8 Délais d’arrivée déterminés superposés aux signaux des capteurs . . . 50
4.9 Front d’onde et angles pour la détermination de la résolution de l’algorithme . 51 4.10 Exemple de la localisation d’un impact . . . 52
5.1 Simulations multiples de l’algorithme MUSIC avec fronts d’onde courbes et distordus . . . 56
5.2 Résultat de l’algorithme MUSIC avec les données expérimentales du cas #2 . . 58
5.3 Résultat de l’algorithme MUSIC avec les données expérimentales du cas #3 . . 59
5.4 Résultats de l’algorithme Qu avec les données expérimentales du cas #3, pour 2 et 3 itérations. . . 59
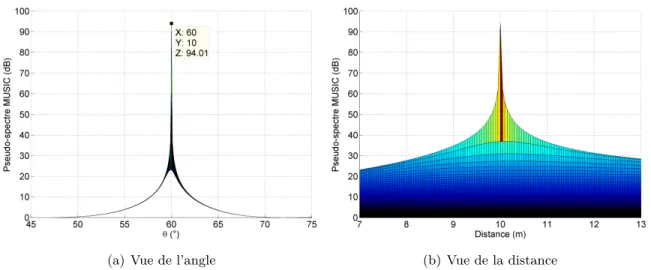
5.5 Spectre de MUSIC en deux dimensions en simulation, sans distorsion. . . 61
5.6 Pseudo-spectre de MUSIC en 2D en simulation sans distorsion, projection de l’angle et de la distance . . . 62
5.7 Vues projetées pour la localisation en angle et en distance avec l’algorithme Qu en simulation, sans distorsion, 3 itérations . . . 62
5.8 Spectre de MUSIC en deux dimensions en simulation, avec distorsion. . . 63
5.9 Pseudo-spectre de MUSIC en 2D en simulation avec distorsion, vues projetées de l’angle et de la distance. . . 63
5.10 Vues projetées pour la localisation en angle et en distance avec l’algorithme Qu en simulation, avec distorsion, 3 itérations . . . 64
5.11 Pseudo-spectre de MUSIC en 2D pour le cas #2 . . . 66
5.12 Résultats de la localisation en angle et en distance avec l’algorithme Qu pour le cas #2, 2 itérations . . . 67
5.13 Vues projetées du pseudo-spectre de MUSIC en 2D pour le cas #3 . . . 68
5.14 Vues projetées des résultats de la localisation en angle et en distance avec l’algorithme Qu pour le cas #3, 3 itérations . . . 68
5.15 Comparaison entre les fronts théoriques à différentes distances et le front ex-périmental du cas #2 . . . 69
5.16 Comparaison entre les fronts théoriques à différents angles et le front expéri-mental du cas #2. . . 69
5.17 Vues projetées des résultats de la localisation en angle et en distance d’un impact pour le cas #7 . . . 71
5.18 Pseudo-spectre de MUSIC2D pour le cas #14 . . . 74
5.19 Résultats de l’algorithme Qu pour le cas #14 . . . 75
5.20 Graphiques d’erreur absolue moyenne pour les différents algorithmes . . . 76
5.21 Graphiques d’erreur relative moyenne de r pour les différents algorithmes . . . 76
6.1 Résultats de l’algorithme Qu en 2 dimensions pour le cas #2, 2 itérations . . . 80
6.2 Fronts des 4 segments d’une même acquisition, cas #2 . . . 81
6.3 Segmentations des données de l’acquisition . . . 82
6.4 Problème du choix de la référence avec de la distorsion. . . 83
6.5 Résultats des N références pour le cas #2 . . . 84
6.6 Résultats des N références pour le cas #3 . . . 84
6.7 Résultats de la localisation avec la deuxième méthode alternative . . . 85
6.8 Signe de la distorsion gauche-droite selon le type d’erreur . . . 86
6.9 Résultats de δ et ∆φ sans relocalisation avec une grande courbure volontaire, simulation du cas #12 . . . 87
6.10 Résultats de δ et ∆φ avec relocalisation avec une grande courbure volontaire, simulation du cas #12 . . . 87
6.11 Front d’onde idéal de la relocalisation de δ + ∆φ, avec grand ∆φ choisi volon-tairement, simulation du cas #12 . . . 88
6.12 Exemple de division d’un réseau en 3 sous-réseaux . . . 89
6.13 Exemple de la distorsion identique pour plusieurs sources, 2 sources à θ1= 90◦ et θ2 = 90◦, r1= r2 = 10 m . . . 91
6.14 Problème de la convergence vers l’erreur de la moyenne des distorsions, 2 sources (θ1= 45◦ et θ2 = 90◦, r = 10 m) . . . 93
A.2 Schéma d’un canal d’amplification . . . 103
Liste des symboles
a Vecteur directionnel du réseau A Matrice des vecteurs directionnels
α Constante d’atténuation β Constante de phase C Symbole de condensateur d Distance séparant les capteurs
dsn Distance entre la source et le capteur n
δ Vecteur de distorsion du front d’onde
e Vecteur d’erreur entre un front d’onde théorique et expérimental
f Fréquence
fs Fréquence d’échantillonnage
G Gain
Γ Corrélation croisée I Matrice identité
I Matrice des signaux en phase (démodulation en phase et en quadrature)
imax Vecteur des indices des maximums de la corrélation croisée
∆i Vecteur des différences des indices des maximums de la corrélation croisée
k Indice du temps d’échantillonnage ou de l’échantillon K Nombre total d’échantillons
l Localisation par l’inverse de l’erreur quadratique λ Longueur d’onde
Λ Matrice des valeurs propres
m Indice des sources M Nombre de sources
n Indice d’élément du réseau N Nombre d’éléments du réseau
n Vecteur de bruit des signaux
N Matrice des vecteurs de bruit des signaux
pn(θ) Projection dans le sous-espace bruit de MUSIC Pn,s Projecteur dans le sous-espace bruit, source
P Opérateur de propagation, ou propagateur, de l’algorithme Qu
φn Déphasage d’un élément du réseau causé par le ∆rn équivalent
ϕ Angle de la source par rapport au centre du réseau
φ Vecteur des phases des capteurs Q Matrice de l’algorithme Qu
Q Matrice des signaux en quadrature (démodulation en phase et en quadrature)
r Distance séparant la source et le réseau de capteurs
˜r Distance estimée entre la source et le réseau de capteurs ∆r Différence de parcours des ondes pour se rendre à un capteur R Matrice de covariance
R Symbole de résistance
s Vecteur des enveloppes complexes des signaux S Matrice des enveloppes complexes des signaux
s(t) Signal temporel capté par le réseau
σ2
n Puissance du bruit idéal
σθ Écart entre l’angle ˜θ et l’angle θ
T Température (température de l’air)
t Temps
td Délai temporel entre le moment d’arrivée d’un signal sur deux capteurs
θ Angle de la source par rapport au réseau de capteurs
˜θ Angle estimé de la source par rapport au réseau de capteurs
vp Vitesse de propagation de l’onde
V Matrice des vecteurs propres v Vecteurs propres
x Vecteur des signaux reçus X Matrice des signaux reçus
z Facteur d’amortissement d’un système du deuxième ordre ζ Valeur propre
Liste des sigles et acronymes
AC alternating current
ADC analog-to-digital converter DC direct current
DOA direction of arrivals FFT fast Fourier transform FIR finite impulse response
LRTS Laboratoire de Radiocommunication et de Traitement du Signal
MUSIC multiple signal classification
MUSIC2D multiple signal classification, 2 dimensions
PCB printed circuit board SNR signal-to-noise ratio SDK software development kit TDOA time delay of arrival USB universal serial bus
À ma famille et spécialement à mes parents
Remerciements
Je tiens tout d’abord à remercier sincèrement mon directeur de recherche, Dominic Grenier, pour son support et ses conseils. Ce travail n’aurait pas été possible sans lui. Sa supervision, nos discussions et nos échanges d’idées m’ont permis d’explorer de nouvelles méthodes et d’approfondir mes connaissances. Il a fortement contribué à faire de ma maîtrise une belle expérience.
Je veux remercier ma famille pour leur soutien indispensable et leurs encouragements tout au long de ma maîtrise. Je veux aussi remercier mon père, François Gallichand, pour ses idées et son aide précieuse pour la réalisation du matériel.
Je remercie mes amis, en particulier Pascal Djiknavorian et Bahareh Elahian. Nos discussions, nos interactions et votre présence ont été des plus agréables. Je suis heureux d’avoir eu la chance de faire votre connaissance. Je remercie aussi mes amis et collègues du laboratoire, Louis-Philippe Rousseau, Emmanuel Racine, Ahmed Kebe, Carl Poirier, et tous les autres. Un merci aux professeurs du LRTS et à tous ceux qui ont participé aux pauses et aux dîners. Vous tous avez contribué à faire de ma maîtrise une expérience enrichissante et agréable. Je tiens également à remercier les techniciens du département de génie électrique et informa-tique pour leur aide et leurs conseils lors de la réalisation du matériel et des prises de mesures expérimentales, en particulier Gaétan Bernier, François Bérubé et Martin Gagnon.
Enfin, je remercie le FQRNT pour le soutien financier obtenu. Je veux aussi remercier tous ceux et celles qui, d’une manière ou d’une autre, ont contribué à ce travail.
Chapitre 1
Introduction
La localisation de sources est déjà présente dans le domaine électromagnétique depuis long-temps, par exemple par l’utilisation d’antennes comme capteurs. Plusieurs techniques em-ploient, entre autres, des réseaux de capteurs, en combinaison avec les algorithmes de trai-tement de signal, pour déterminer l’origine des signaux reçus. De la même manière, il est possible de localiser des sources sonores à l’aide d’un réseau de capteurs acoustiques. L’onde sonore se propage alors dans un milieu, du point d’émission jusqu’au réseau de capteurs, et les signaux enregistrés permettent de déterminer la position de la source par rapport au réseau. Plusieurs applications pratiques à cette localisation sont possibles, parmi lesquelles il y a la localisation d’un tireur embusqué ou bien l’identification de sources de pollution sonore dans un environnement complexe.
Les ondes sonores se propagent dans l’air, un milieu inhomogène et variable. Cette inho-mogénéité a des conséquences importantes pour les fronts d’onde. Celle-ci cause plusieurs distorsions aux ondes qui sont ensuite reçues par un réseau de capteurs acoustiques. Ces signaux captés sont utilisés afin d’estimer la position d’origine de la source. Par contre, le milieu engendre une déformation des fronts d’onde et ceux-ci ne correspondent plus à un modèle idéal. L’estimation de la position de la source doit prendre en compte ces distorsions, qui ont un impact sur celle-ci.
Plusieurs algorithmes existent déjà pour la localisation de sources à l’aide d’un réseau de capteurs, soit pour la détermination des directions d’arrivée (DOA) des signaux par rapport au réseau. Plusieurs de ces algorithmes fonctionnent pour des sources monochromatiques ou à bande étroite et exploitent les différences de phase entre les capteurs pour l’estimation des positions d’origines. Parmi ceux-ci, il y a des algorithmes de localisation de la direction d’arrivée comme la formation de voies [10] ou des algorithmes à haute résolution comme MUSIC [10, 21]. Une autre méthode de DOA est l’algorithme Qu [18, 16, 19] qui utilise le propagateur. Il s’agit d’un algorithme itératif qui a la caractéristique de permettre de récupérer le front d’onde de la source. De plus, cet algorithme localise et récupère les fronts
d’onde distordus. D’autres méthodes existent, telles que [17] ou encore [3], qui exploitent de nouvelles techniques provenant entre autres du traitement d’images. Celles-ci pourraient aussi être utilisées pour l’estimation des distorsions de phases des fronts d’onde. La distorsion considérée en est une de phase causée par le milieu de propagation, mais dans certains cas, une distorsion d’amplitude peut être présente. Certains algorithmes, comme [22], traitent de ce cas.
Dans le cas où les sources sont situées assez près du point d’observation, les fronts d’onde captés sont courbés. Dans cette situation, en plus d’estimer l’angle de la source, la distance de celle-ci peut aussi être estimée. L’algorithme MUSIC est adapté en considérant un nouveau modèle de front d’onde avec une courbure, pour tenir compte de la distance. Ce nouveau modèle forme l’algorithme MUSIC2D [11], soit MUSIC en deux dimensions pour l’angle et la distance. D’autres méthodes, par exemple [4] basées sur MUSIC2D, pourraient aussi être utilisées. Enfin, les algorithmes fournissant les fronts d’onde, comme Qu, sont utilisables pour l’estimation de la distance en calculant l’erreur quadratique entre le front d’onde obtenu et des fronts d’onde théoriques.
Lorsque les sources ne sont pas continues ou du type monochromatique, l’utilisation des délais temporels est possible. Ainsi, pour des sources sonores produites par des explosions ou des impacts, la localisation des sources exploite les différences des temps d’arrivée des signaux sur le réseau de capteurs.
La localisation de sources sonores s’applique à plusieurs situations comme la localisation par des robots. Dans [25], on présente la localisation de sources à l’aide du TDOA pour de courtes distances, alors que [24] présente une méthode en fréquence par formation de voies pour des sources se déplaçant. Ces techniques sont présentés pour la localisation tridimensionnelle, avec des réseaux de capteurs non linéaires, et ne peuvent cependant pas bien localiser des signaux monochromatiques. Il existe aussi d’autres montages matériels et logiciels pour l’acquisition de données, comme présenté en [13].
1.1
Objectifs
Le premier objectif est de parvenir à la réalisation d’un réseau linéaire de capteurs acoustiques permettant la localisation de sources sonores qui se propagent dans l’air. Cette réalisation du réseau inclut la création et l’assemblage de matériel ainsi que le code qui permet son utilisation. L’emploi de ce réseau et le montage expérimental permettent l’acquisition de données expérimentales réelles. Ces mesures empiriques servent à tester les algorithmes dans des situations réelles où tous les facteurs qui peuvent affecter les ondes sont présents.
Plusieurs algorithmes de localisation existent déjà pour l’estimation de la position d’une source. Par contre, plusieurs d’entre eux ne tiennent pas compte d’un milieu de
propaga-tion inhomogène causant une déformapropaga-tion des fronts d’onde, car ils ont été pensé pour des ondes électromagnétiques. Ce mémoire présente des situations où le milieu de propagation, soit l’air, provoque de la distorsion qui doit être prise en compte pour la localisation des sources. L’effet de cette distorsion sur le repérage des sources par les algorithmes existants est étudié.
Les algorithmes ne fonctionnent pas tous de la même manière pour estimer les positions des sources (angles et distances). Leur comportement relativement à la distorsion n’est donc pas nécessairement le même. Ce mémoire présente ainsi une comparaison des résultats des algorithmes, comme MUSIC2D ou Qu, en présence de fronts d’onde distordus. Des idées de solutions pour améliorer les performances relativement à la distorsion sont aussi présentées dans le mémoire.
1.2
Plan du mémoire
Ce mémoire présente d’abord, au chapitre 2, le matériel utilisé pour la réalisation du réseau linéaire de capteurs acoustiques. Les raisons qui ont justifié le choix de cet équipement et les caractéristiques du réseau créé sont présentées. Ce chapitre fournit aussi les performances obtenues avec ce réseau de capteurs. Le fonctionnement détaillé du matériel est expliqué, de même que les étapes nécessaires à son montage et les ajustements à faire pour l’acquisition de données expérimentales valides. La manière d’utiliser le matériel pour faire une acquisition de données est aussi abordée.
Le chapitre 3 présente les modèles utilisés et les caractéristiques du milieu de propagation. Cette section aborde les notations et conventions utilisées dans le mémoire ainsi que la for-mation des signaux, c’est-à-dire le modèle mathématique créé à partir des données expéri-mentales. Les différents modèles correspondants aux différents cas de fronts d’onde, plans ou courbes, sont développés. Les particularités du milieu de propagation et des signaux captés sont aussi présentées.
Les algorithmes employés et le traitement des signaux effectué sont ensuite présentés, au cha-pitre4. D’abord, le traitement initial des signaux, par exemple leurs filtrages, est détaillé. Ceci permet ensuite d’introduire et d’expliquer les détails de fonctionnement des algorithmes de lo-calisation principaux, comme MUSIC et Qu. Le chapitre traite en premier des algorithmes de localisation pour des signaux monochromatiques et développe ensuite les algorithmes utilisés pour un signal d’impact.
Le chapitre5présente les résultats, suivis d’une analyse. Dans ce chapitre, les résultats obtenus pour l’estimation de la direction d’arrivée ainsi que pour la localisation en deux dimensions (angle et distance de la source) sont présentés. L’analyse des performances des algorithmes en présence de fronts d’onde distordus et l’observation de leur comportement utilisent des
simulations et des résultats expérimentaux. Les algorithmes sont aussi comparés entre eux. Enfin, plusieurs pistes de solutions sont énoncées et testées au chapitre6 pour tenter d’amé-liorer les résultats. Les algorithmes ainsi que quelques résultats sont présentés.
Chapitre 2
Matériel
La prise de mesures expérimentales apporte des données réalistes, mais présente plusieurs défis. En particulier, le choix du matériel utilisé ainsi que le montage expérimental réalisé affectent directement quels types de résultats il sera possible d’obtenir. Ce chapitre présente le montage matériel utilisé afin d’obtenir des mesures expérimentales. Les caractéristiques des différents éléments, le montage pratique réalisé et son utilisation figurent parmi les différents sujets abordés.
2.1
Environnement de mesure
Les mesures expérimentales choisies sont des mesures acoustiques prises dans l’air. Le son se propage dans l’air à partir de la source vers un réseau linéaire de capteurs acoustiques. Ces capteurs sont des microphones audio. La distance entre les différents capteurs ainsi que leur nombre doivent pouvoir être variables pour s’adapter à différentes situations. Le signal de sortie des microphones étant très faible, il est souvent nécessaire de l’amplifier avant de pouvoir l’utiliser. Le signal de chaque capteur est ainsi amplifié et filtré avant d’être numérisé par un convertisseur analogique-numérique. Les données résultantes sont ensuite transférées à un ordinateur pour être enregistrées et traitées. Le traitement se fait hors ligne, en différé. Cependant, il serait possible de réaliser le traitement des données en ligne et en continu en utilisant le même matériel.
Le système conçu opère dans la bande de fréquences audibles, soit d’environ 20 Hz à près de 20 kHz. Cependant, en changeant les capteurs et avec quelques modifications au reste du matériel, il serait possible d’opérer dans une bande de fréquences plus élevée.
2.2
Choix du matériel
Le choix du capteur acoustique constitue la première étape dans la conception du montage expérimental. Les capteurs utilisés sont des microphones audio à électret. Le microphone choisi
est le modèle CMB-6544PF de la compagnie CUI Inc [6]. Ce type de capteur est peu coûteux et est suffisamment performant dans la bande de fréquences considérée, soit de 20 Hz à 20 kHz. Les microphones choisis sont omnidirectionnels, c’est-à-dire qu’ils captent le son provenant de toutes les directions. D’autres microphones peuvent aussi être utilisés, tant qu’ils peuvent s’adapter aux circuits d’amplification. En particulier, l’impédance et la tension d’alimentation sont à considérer (voir l’annexeA).
Les microphones sont tenus par des tiges de bois. La figure 2.1 montre un schéma de la construction de ces tiges. Excepté les trous aux extrémités, il y a un espace de 5 cm entre chaque trou. L’espacement minimum entre les capteurs est donc de 5 cm. L’espacement maxi-mum dépend du nombre de capteurs utilisés. Avec le nombre maximaxi-mum voulu de 12 capteurs, il est de 40 cm. Ainsi, l’espacement entre les microphones peut être ajusté selon des multiples de 5 cm. Les microphones sont insérés par l’arrière, ce qui fait que l’ouverture des microphones se trouve sur le devant des tiges et les connexions derrière. Chaque tige mesure 1,2 m.
5 cm 2,5cm 2 cm 0, 5 cm 2,5 cm
Trou pour microphone
Devant
Figure 2.1: Tige de support des microphones
Les tiges de bois sont supportées par des trépieds. Les tiges sont construites en paires. Une jonction est faite entre les deux parties pour les tenir alignées ensemble en plus de permettre leur montage sur un seul trépied. En plus de supporter les tiges et les microphones, les trépieds supportent l’essentiel du matériel nécessaire pour l’acquisition des données.
Les microphones sont reliés au reste du matériel d’acquisition par des câbles, approxima-tivement de la même longueur. Pour chaque microphone, leurs contacts s’insèrent dans un connecteur à la fin du câble. Le câble et le microphone sont tenus en place avec des morceaux de Dual Lock de la compagnie 3M, un morceau sur le câble et un morceau sur la tige. Pour permettre un ajustement de la position des microphones, du Dual Lock a été installé à côté de chaque trou de chaque tige. Deux tiges en possèdent même des deux côtés des trous. Les câbles possèdent de plus un blindage afin de limiter le bruit induit sur le signal.
Les signaux provenant des microphones ont une amplitude en général assez faible. C’est pourquoi il est nécessaire d’amplifier les signaux avant d’effectuer la conversion analogique-numérique. Pour ce faire, un circuit électronique a été conçu. La figure 2.2 montre ce circuit d’amplification (10,16 cm sur 15,24 cm).
Figure 2.2: Circuit d’amplification des signaux
Un circuit d’amplification possède six canaux. Il est ainsi possible d’amplifier les signaux de six microphones différents avec un seul circuit. Chaque canal possède un amplificateur à gain fixe, un amplificateur à gain variable ainsi qu’un filtre passe-bas antirecouvrement. Le gain fixe du premier amplificateur est de 50. Les gains totaux obtenus par la combinaison des deux amplificateurs sont 0, 50, 100, 250, 500, 1 000, 2 500 et 5 000. Ceux-ci sont configurables par circuit et non par canal. Ainsi, tous les canaux d’un circuit d’amplification possèdent le même gain. Entre les différents étages d’amplification, des filtres passe-haut sont présents. Le circuit d’amplification sert aussi à alimenter les microphones à électret. Il est lui-même alimenté par deux batteries de 9 V, fournissant une tension de +9 V et de −9 V. Le schéma complet du circuit est présenté à l’annexe A.
Les signaux amplifiés doivent être numérisés afin d’être traités numériquement par un ordi-nateur. Ceci est réalisé par un convertisseur analogique-numérique contenu dans un module d’acquisition de la compagnie Data Translation. Le modèle choisi est le DT9816-S [7]. La
figure2.3montre le module d’acquisition utilisé. Ce module d’acquisition permet de faire une conversion analogique-numérique de 6 canaux simultanément. Ainsi, l’acquisition des données sur chaque canal est synchronisée. Comme il n’y a que 6 entrées analogiques par module et que le nombre voulu de capteurs est de 12, il est nécessaire d’utiliser deux modules, ce qu’ils permettent, tout en conservant une synchronisation. La résolution des canaux est de 16 bits et la fréquence d’échantillonnage maximale est de 750 kHz. Le module possède aussi des entrées et des sorties numériques, un compteur ainsi que des entrées externes pour une horloge et un déclenchement externes. Ceci permet de l’utiliser comme module de contrôle et d’interface en plus du convertisseur analogique-numérique. Les modules d’acquisition sont connectés à l’ordinateur par une interface USB. Ceci permet le transfert des données en plus de four-nir l’alimentation électrique. Enfin, le logiciel Matlab contrôle directement les modules. Le logiciel d’acquisition des données et de traitement des données peut donc être le même.
Figure 2.3: Module d’acquisition (convertisseur analogique-numérique)
Le dernier élément matériel significatif est un ordinateur. C’est celui-ci qui contrôle l’ac-quisition des données et enregistre les résultats obtenus. Le choix de l’ordinateur n’est pas important. Par contre, il est nécessaire de s’assurer qu’il pourra être alimenté lors de tests expérimentaux réalisés à l’extérieur, ce qui est le cas d’un ordinateur portable.
Lors des mesures empiriques, certaines informations relatives à la source doivent être notées, dont l’angle qu’elle forme avec le réseau de microphones. Pour ce faire, un niveau laser avec un rapporteur d’angle intégré a été utilisé. Cet équipement est moins critique, puisque n’importe
quel autre moyen de déterminer l’angle peut être utilisé.
2.3
Fonctionnement du matériel
La figure 2.4présente le schéma du parcours du signal pour un canal. Comme mentionné à la section 2.2, le microphone se branche sur le circuit d’amplification. Le signal est filtré passe-haut entre les étages et passe-bas en sortie afin d’éviter le recouvrement spectral. La fréquence de coupure du filtre passe-bas est de 100 kHz. La fréquence d’échantillonnage minimale est donc de 200 kHz. Cependant, la réponse en fréquence du microphone choisi est limitée à 20 kHz et produit aussi l’effet d’un filtre passe-bas antirecouvrement. Les différentes fréquences de coupure ont été choisies en fonction des signaux reçus et aussi pour limiter les effets de l’imprécision des composants des filtres sur la réponse en phase des canaux.
Circuit d’amplification
Filtres passe-haut (≈ 11 Hz) entre les étages
Ordinateur Commande du gain Microphone Amplificateur à gain fixe (gain = 50) Amplificateur à gain variable (gain de 1 à 100) Filtre passe-bas Convertisseur analogique-numérique
Figure 2.4: Parcours du signal d’un capteur
Le circuit d’amplification possède un amplificateur à gain variable qui est configuré sur 3 bits, en entrées du circuit. Les sorties numériques du module d’acquisition sont utilisées afin d’effectuer cette configuration. Un câble relie trois sorties numériques du module d’acquisition au circuit d’amplification et permet de choisir le gain des canaux du circuit. Comme mentionné à la section2.2, le gain est identique pour tous les canaux. Il doit être configuré afin d’utiliser au maximum la plage dynamique des convertisseurs analogique-numérique, sans les saturer. La plage des modules d’acquisition est de ±10 V. Toutefois, un amplificateur est inclus dans les modules et il permet de réduire cette plage à ±5 V, soit un gain de 2. C’est cette plage qui est choisie parce que la sortie maximale du circuit d’amplification est de ±5 V, soit les limites de son alimentation.
Le signal est ensuite relié au convertisseur analogique-numérique. Un connecteur sur le circuit permet de relier l’ensemble des signaux de tous les canaux aux entrées analogiques du module d’acquisition. La fréquence d’échantillonnage fs doit être choisie pour respecter le critère de
Nyquist et plus fs est élevée, meilleure est la résolution du signal. Cependant, plus elle est
élevée, plus la quantité de données générées est grande. Il y a ainsi un compromis à faire entre le taux d’échantillonnage et la quantité de données enregistrées. Le temps d’acquisition est aussi à prendre en compte dans la quantité de données générées. Si l’on désire augmenter la
fréquence d’échantillonnage, il est possible de diminuer le temps d’acquisition afin de limiter la quantité de données. En général, il est avantageux de restreindre le temps d’acquisition au signal utile afin de limiter la quantité de données sauvegardées et faciliter le traitement par la suite. Lorsque le signal est converti sous format numérique, celui-ci est transféré à l’ordinateur par le lien USB pour y être sauvegardé et ensuite traité.
2.3.1 Détails du circuit d’amplification
La conception des différentes parties du circuit, montré au complet à l’annexeA, est présentée dans cette section.
R C
GND Vout Vin
Figure 2.5: Forme du filtre RC passe-haut
Les filtres passe-haut entre les différents étages du circuit sont des filtres passifs du premier ordre. Ce sont des filtres RC (composés de résistances et de condensateurs), de la forme présentée à la figure2.5. Leur fréquence de coupure est approximativement de 11 Hz, calculée à partir de l’équation (2.1). Les valeurs des composants choisis sont de 1 µF et de 15 kW. Ceux-ci permettent d’obtenir la fréquence de coupure désirée sans présenter une impédance trop grande ou trop faible. Le but de ces filtres passe-haut est d’éliminer les composantes DC des signaux créées par l’alimentation des microphones et les décalages statiques des amplificateurs opérationnels. Ceci limite leurs effets indésirables, comme leur amplification par les étages subséquents. fcp−h = 1 2πRC (2.1) R R C2 C1 GND Vin Vout
Le filtre passe-bas antirecouvrement, terminant la mise en forme des signaux, est quant à lui un filtre actif du deuxième ordre. Il est construit selon la structure de filtre Sallen–Key avec un amplificateur opérationnel [15, section 21.5], présentée à la figure2.6. Les valeurs des composants choisis permettent d’obtenir un filtre maximalement plat, c’est-à-dire un filtre de Butterworth, tout en correspondant à des valeurs couramment disponibles. Pour obtenir ce type de filtre, le facteur d’amortissement doit être de z = √1
2. Celui-ci est déterminé à partir de l’équation suivante z= s C1 C2 1 + 1 − G0 2C1 C2 ! (2.2) où G0 est le gain du filtre. Le filtre conçu a un gain unitaire, G0 = 1, comme le montre le montage suiveur de l’amplificateur opérationnel. L’équation (2.2) se réduit alors à l’équation (2.3).
z=
s
C1
C2 (2.3)
Pour obtenir la valeur désirée, le rapport des condensateurs est de 0,5, soit C1= 0,5C2. C’est ce qui est réalisé dans le circuit, comme présenté à la figure 2.7, où deux condensateurs en séries de valeurs identiques, C9et C10, permettent de diviser la valeur équivalente d’un facteur 2, par rapport à C8. 14 13 12 U2D OPA4141AID R6 475 R7 475 C8 4.7nF C9 4.7nF C10 4.7nF GND
Figure 2.7: Schéma du filtre passe-bas Sallen–Key réalisé
La fréquence de coupure d’un filtre de Butterworth de ce type correspond à l’équation (2.4).
fcskB =
1 2πR√C1C2
(2.4) À partir des valeurs choisies, la fréquence de coupure est d’approximativement 100 kHz. Celle-ci est beaucoup plus élevée par rapport à la fréquence maximale des signaux, mais cela permet de limiter les effets des variations des valeurs des composants. Ces variations font légèrement varier la fréquence de coupure et la réponse en fréquence des filtres de chaque canal. Par contre, comme cette fréquence de coupure est élevée, les variations seront ainsi très mineures
dans la bande des signaux utiles, limitant ainsi les différences entre les canaux. Tout comme les filtres passe-haut, les valeurs choisies permettent au filtre de présenter une impédance raisonnable.
Vout Vin
Figure 2.8: Montage suiveur de l’amplificateur opérationnel
Dans le circuit d’amplification, chaque étage est isolé des autres par un suiveur. De cette façon, les impédances d’entrée et de sortie des circuits d’un étage n’influencent pas les autres étages. Cette isolation est réalisée simplement avec un amplificateur opérationnel en mode suiveur, présenté à la figure2.8. Au total, deux suiveurs isolent les étages d’amplification et du filtre passe-bas. R2 15k R3 750k 1 2 3 GND C12 10pF
Figure 2.9: Schéma du circuit de l’amplificateur à gain fixe
L’amplification des signaux est réalisée en deux étapes, soit une étape à gain fixe et l’autre à gain variable. L’amplificateur à gain fixe se fait avec un amplificateur opérationnel. Celui-ci est monté en amplificateur de tension inverseur, comme présenté à la figure 2.9. Avec les valeurs des composants, le gain est de
Gi = −750 × 10
3
15 × 103 = −50 .
La valeur de la résistance de 15 kW a été choisie pour former un filtre passe-haut d’environ 11 Hz, avec le condensateur en série qui précède l’amplificateur, permettant d’enlever la composante DC du signal des microphones. Celle-ci doit aussi être suffisamment élevée pour ne pas trop influencer l’impédance de l’étage précédente. Un condensateur de 10 pF dans la boucle de rétroaction de l’amplificateur opérationnel forme un filtre passe-bas et limite la bande de fréquence à 21 kHz. Cet ajout a été nécessaire pour éliminer certaines oscillations dans le circuit. Ceci limite par contre la plage de fréquence des signaux. Heureusement, avec l’utilisation des microphones sélectionnés, leur fréquence de coupure et celle de ce filtre
passe-bas sont similaires. Il n’y a donc pas d’impact sur les signaux captés. Enfin, les valeurs des composants amènent à des impédances de grandeurs raisonnables et facilement disponibles. L’amplificateur à gain variable est réalisé avec le circuit intégré LTC6910–1 de la compagnie Linear Technology [14]. Ce circuit possède une grande largeur de bande ainsi qu’un faible ni-veau de bruit. Un autre avantage de ce composant est qu’il peut fournir un signal de sortie dont l’amplitude correspond aux tensions d’alimentation. Il peut aussi supporter un signal d’entrée de la même amplitude que les tensions d’alimentation, avec le choix d’un gain unitaire. Ce circuit est construit comme un amplificateur inverseur. Ainsi, les deux étages d’amplification du circuit conçu sont des amplificateurs inverseurs. Le signal amplifié résultant est donc non inversé et correspond au signal d’entrée. De plus, la conception interne de cet amplificateur est telle que son impédance d’entrée est variable selon le gain sélectionné. L’utilisation d’un suiveur avant celui-ci permet d’isoler son entrée et d’être indépendant de ces changements d’impédance.
Le circuit intégré choisi pour les amplificateurs opérationnels est le OPA4141AID de la com-pagnie Texas Instruments [23]. Ce circuit est composé de 4 amplificateurs opérationnels dans un seul boîtier. Un seul circuit intégré est alors nécessaire par canal. Ce composant a été sélectionné entre autres parce qu’il offre une grande largeur de bande, un faible niveau de bruit et demande tout de même peu de puissance. Ce dernier point est intéressant puisque le système fonctionne avec des batteries. De plus, comme pour l’amplificateur à gain variable, il peut fournir une amplitude de sortie allant jusqu’aux tensions d’alimentation, ne limitant donc pas la plage des convertisseurs analogique-numérique.
La figure 2.10présente le circuit d’alimentation des microphones. Il est constitué entre autres d’un filtre passe-bas passif RC du premier ordre. La fréquence de coupure de ce filtre est d’environ 31 Hz. Son but principal est de filtrer l’alimentation +5 V afin d’éviter d’ajouter du bruit sur le signal, d’où l’utilisation d’une capacité élevée et d’une faible résistance pour limiter l’effet sur le reste du circuit. La résistance R1sert à s’adapter à l’impédance du microphone et le condensateur C1 permet de conserver uniquement les composantes AC du signal. La diode
D4 empêche un retour des signaux par l’alimentation.
R1 1k C1 1µF +5V GND 1 2 P1 mic_in R10 51 D4 C11 100µF GND
2.4
Montage complet
Le montage complet comporte l’ensemble du matériel nécessaire aux tests expérimentaux. Le nombre maximum de capteurs est de 12. Comme les modules d’acquisition disposent de seulement 6 entrées analogiques, il est nécessaire d’employer deux modules. L’ensemble du matériel a ainsi été choisi et conçu en tenant compte de cette contrainte. La majorité du matériel est en double, puisqu’il est relié à un module d’acquisition. Par exemple, les circuits d’amplification comportent 6 canaux pour aller de pair avec les modules d’acquisition, soit un circuit par module. L’ajustement du montage est présenté à l’annexeB.
Le réseau de capteurs est constitué de deux groupes identiques. L’utilisation de deux mo-dules d’acquisition séparés amène certains problèmes. En effet, chacun des convertisseurs analogique-numérique d’un module d’acquisition est synchronisé, mais les deux modules ne le sont pas nécessairement. On doit donc synchroniser les deux modules ensemble. La méthode retenue consiste à générer un signal d’horloge, à partir du compteur d’un des modules, et de distribuer celui-ci à l’entrée d’horloge externe de tous les modules. De cette façon, chaque module utilise la même horloge pour l’acquisition des données. La fréquence de cette horloge détermine la fréquence d’échantillonnage.
Même en synchronisant l’horloge des modules, l’acquisition doit elle aussi démarrer simulta-nément sur chacun d’eux. Il ne doit pas y avoir de délai entre les deux groupes de capteurs, parce que les données sont celles du réseau complet, donc les données des deux groupes. Un délai entre les moments de départ des acquisitions de chaque groupe amènerait un décalage entre les données et celles-ci ne correspondraient plus à un réseau linéaire. Pour éviter un délai, l’entrée de déclenchement externe des modules d’acquisition est utilisée. Un bouton sert à envoyer le signal de déclenchement aux deux modules simultanément, évitant ainsi un délai dans l’acquisition des données.
Le nombre de paires de tiges de support varie selon le nombre de capteurs et leur espacement. La figure 2.11 montre un montage complet typique du matériel, lorsque les deux paires de tiges de bois sont utilisées, alors que la figure 2.12 présente un montage typique lorsqu’une seule paire de tiges supportant les capteurs est utilisée. La séparation en deux groupes de capteurs est facilement remarquable sur ces photos.
2.5
Acquisition de données
La figure2.13 présente la géométrie du réseau linéaire uniforme utilisé lors des mesures. La source est située à une distance r et à un angle θ, mesurés du milieu du réseau. Comme mentionné à l’annexe B, l’angle est mesuré par rapport à une référence, choisie ici comme étant perpendiculaire à l’axe du réseau, au centre de celui-ci. L’angle mesuré est ϕ et la conversion vers l’angle θ est ensuite réalisée pour obtenir l’angle de la source par rapport à
Figure 2.11: Montage complet typique du matériel pour la prise de mesures expérimentales
l’axe du réseau. Les capteurs sont espacés d’une distance uniforme d. La convention choisie est que le premier capteur est situé à la gauche du réseau vue de derrière. Tous ces paramètres (d,
ϕ et r) peuvent être variés afin de produire des données provenant de différentes situations.
Les acquisitions sont faites avec le logiciel Matlab. Un script permet de contrôler les modules d’acquisition. Il suffit de configurer les variables de ce script et de l’exécuter afin de faire l’acquisition des données. Ces variables sont, entre autres, le nombre de capteurs, le gain des amplificateurs variables, le temps d’enregistrement, la fréquence d’échantillonnage et le mode de déclenchement. Deux modes de déclenchement sont possibles dans le script, soit un déclenchement externe, avec un bouton, ou un déclenchement logiciel automatique. Lorsque deux modules sont utilisés, il est nécessaire, comme présenté à la section 2.4, d’utiliser un déclenchement externe.
La fréquence d’échantillonnage peut être choisie comme désiré dans la plage de fréquences permise par les modules. Par contre, lorsque les deux modules sont utilisés, les choix sont plus limités. En effet, l’utilisation du compteur d’un des modules afin de générer l’horloge de synchronisation réduit la résolution de la fréquence d’échantillonnage. Ainsi, ce ne sont
Figure 2.12: Montage typique du matériel utilisant une seule paire de tiges supportant les capteurs ϕ r θ source axe du réseau d #1 #12 centre du réseau
pas toutes les valeurs qui sont possibles. Peu importe la valeur choisie, le script indique la vraie valeur utilisée pendant l’acquisition si les deux diffèrent. La valeur réelle est déterminée automatiquement par le module. Bien sûr, il faut tenir compte du recouvrement spectral lors du choix de la fréquence d’échantillonnage. Selon les besoins, il sera possible d’effectuer un sous-échantillonnage (une décimation) des données après l’acquisition.
Après l’exécution du script, donc d’une acquisition, les données de tous les capteurs sont mises ensemble afin de former une seule matrice. Cette matrice comporte autant de colonnes qu’il y a de capteurs. Ainsi, les données de chaque capteur sont représentées sous forme de vecteur colonne. Cette matrice de données et certaines variables du script sont sauvegardées dans un fichier Matlab nommé avec la date et l’heure de l’acquisition. Ces variables sauvegardées sont le gain, la fréquence d’échantillonnage et les temps d’échantillonnage. Pour effectuer le traitement en différé, il suffit de charger le fichier de données correspondant à l’acquisition voulue dans le logiciel Matlab, ce qui permet de retrouver l’ensemble des données enregistrées pour cette acquisition. L’annexe C présente un complément sur l’installation et l’utilisation des logiciels requis.
Une séquence d’acquisition typique, considérant que le matériel est déjà installé et opération-nel, peut ressembler à ceci :
1. Configurer le gain, la fréquence d’échantillonnage et les autres variables du script d’ac-quisition ;
2. Alimenter les circuits d’amplification ; 3. Exécuter le script d’acquisition ;
4. Si un déclenchement externe est utilisé, attendre qu’un message indiquant que le système est en attente de déclenchement s’affiche et déclencher l’acquisition ;
5. Attendre la fin de l’acquisition et éteindre les circuits d’amplification.
À la fin de chaque acquisition, il est important de bien prendre en note les différents paramètres de la source (d, ϕ et r) et de l’environnement. Les paramètres d’environnement peuvent être, par exemple, des facteurs influençant la vitesse de propagation comme la température, l’humidité et la pression atmosphérique, ou bien des facteurs influençant la qualité du signal comme la vitesse du vent.
2.6
Conclusion
Le matériel choisi pour la prise de mesures expérimentales présente plusieurs avantages. Le matériel est peu coûteux et facilement disponible commercialement. Excluant les circuits d’amplification et les tiges de bois, tout le matériel est accessible et achetable sans difficulté. Même pour ce qui est du matériel personnalisé, il est facile de reproduire la majorité de celui-ci, par exemple les tiges supportant les microphones. Les circuits d’amplification peuvent être
plus complexes à reproduire, mais avec le schéma complet du circuit à l’annexeA, cela reste assez facile. Le matériel est aussi flexible, permettant de s’adapter à différentes situations. En effet, celui-ci est configurable facilement, ajustable, et peut être adapté pour d’autres capteurs. Le même matériel est ainsi utilisable pour d’autres types d’acquisitions, autres que pour l’audio. Finalement, le matériel est, dans l’ensemble, simple d’utilisation. Les données expérimentales sont facilement recueillies et sont de bonne qualité.
Le matériel présente par contre certaines limitations. D’abord, certains éléments sont faits sur mesure et ne sont donc pas commercialement disponibles. Il est nécessaire de les faire fabriquer pour s’en servir. De plus, l’ajustement peut parfois être difficile et cela peut amener un manque de précision de certains paramètres, comme l’angle de la source. L’ajustement est aussi limité pour certains paramètres. Ainsi, la distance entre les capteurs est ajustable seulement par multiples de 5 cm. Le choix de la fréquence d’échantillonnage est aussi limité selon les situations. Le matériel s’adapte à différents capteurs, mais il peut être nécessaire d’utiliser un circuit d’adaptation entre le nouveau capteur et le circuit d’amplification. Sans cette adaptation, le choix des capteurs est limité puisqu’ils doivent supporter l’interface d’un microphone à électret. Le circuit limite aussi la fréquence maximale utilisable des capteurs. Enfin, considérant les dimensions physiques du réseau, celui-ci est un peu encombrant lors de l’utilisation. Même en considérant ces limitations, le matériel reste simple, performant et permet d’obtenir de très bonnes données expérimentales.
Chapitre 3
Modèles et milieu de propagation
Avant toutes choses, il est nécessaire de connaître certains éléments essentiels, comme les modèles utilisés et l’environnement de propagation. Ces éléments influencent l’ensemble des traitements qui seront réalisés et forment donc la base des traitements subséquents. Parmi les notions présentées, il y a d’abord la notation des signaux et les conventions particulières ainsi que la formation des signaux pour un réseau de capteurs. Ainsi, le chapitre présentera la notation sous forme matricielle et vectorielle. Il présentera ensuite la manière dont les signaux sont formés à partir de fronts d’onde captés par un réseau linéaire uniforme. Les caractéristiques du milieu et la propagation des ondes d’un signal audio se propageant dans l’air seront présentées, comme les modèles de fronts d’onde plan ou courbe. Enfin, le milieu de propagation étant inhomogène, ses paramètres de propagation varient dans le temps et l’espace. Ces variations créent entre autres de la distorsion des fronts d’onde. Les phases obtenues de chaque capteur ne correspondent plus exactement aux modèles idéaux à cause de ces distorsions. Les caractéristiques de ce milieu inhomogène et les effets que ces perturbations ont sur les signaux seront donc présentés.
3.1
Réseau de capteurs
Les signaux se propagent dans un milieu et sont reçus par plusieurs capteurs identiques, dis-tribués dans l’espace et formant un réseau. Les données du réseau correspondent aux signaux reçus par tous les capteurs combinés ensemble. Il existe plusieurs manières de placer les élé-ments du réseau dans l’espace. Une d’entre elles, qui s’avère très utile, est d’espacer également les éléments disposés sur une droite. Il s’agit alors d’un réseau linéaire uniforme.
3.1.1 Notation des signaux
Les données recueillies par le réseau de capteurs forment les signaux, qui sont utilisés pour le traitement ultérieur. Il est utile de présenter les différentes notations utilisées afin de re-présenter ces mêmes signaux. D’abord, les signaux sont représentés sous formes vectorielle et
matricielle. Les vecteurs et les matrices sont notés respectivement par une lettre minuscule grasse et une lettre majuscule grasse. Les vecteurs sont, sauf autrement identifiés, des vec-teurs colonnes. Les dimensions des matrices et des vecvec-teurs sont spécifiées dans l’ordre par le nombre de lignes et le nombre de colonnes. Par exemple, pour une matrice de 2 lignes par 3 colonnes, ses dimensions sont (2 × 3). Pour un vecteur, une des deux dimensions est égale à l’unité. Différents opérateurs peuvent s’appliquer aux vecteurs et matrices. Parmi les plus importants, la transposition est identifiée par le symbole >, la conjugaison par le symbole ∗ et la transposition-conjugaison par le symbole †.
Les échantillons obtenus à un temps donné correspondent à une épreuve et sont notés sous forme vectorielle, comme à l’équation (3.1). Le nombre de capteurs est noté N, n correspond à l’indice d’élément, k correspond à l’indice du temps d’échantillonnage et K représente le nombre total d’échantillons. Ainsi, xn(tk) correspond à l’échantillon du capteur n enregistré
au temps tk, alors que le vecteur xk désigne l’ensemble des échantillons pour tous les capteurs
au temps tk.
xk= [x1(tk) x2(tk) . . . xN(tk)]> (3.1)
De la même façon, les K échantillons d’un seul capteur se représentent aussi par un vecteur. Les K échantillons des N capteurs sont représentés sous forme matricielle, formant la matrice des signaux reçus. L’équation (3.2) présente cette matrice qui comporte l’ensemble des données captées. Chaque colonne correspond à un vecteur xk de l’équation (3.1), soit les signaux de
tous les N capteurs à un instant tk, alors que chaque ligne représente les signaux d’un capteur
npour tous les K échantillons.
X
(N ×K)= [x1 x2 . . . xK] (3.2) Les signaux étant généralement des nombres complexes, ils sont formés d’un module et d’un argument. Dans une situation à bande étroite, par exemple le cas monochromatique (signaux à une seule fréquence f), l’argument a une importance particulière parce qu’il est relié à la phase des signaux. Celui-ci représente le déphasage dû à leur retard. Il est à noter que les signaux physiques reçus par le réseau ne sont pas complexes et peuvent être représentés de la même manière sous formes vectorielle et matricielle. En bande étroite, ceux-ci sont de moindre importance puisqu’ils ne comportent pas directement l’information de phase. Ils permettent cependant de retrouver les signaux complexes par une démodulation en phase et en quadra-ture. Il est aussi possible de démoduler avant l’échantillonnage, selon les systèmes utilisés, et d’obtenir directement des signaux complexes. Enfin, les signaux physiques enregistrés par le réseau peuvent être utiles lors d’un traitement temporel des échantillons.
3.1.2 Formation des signaux
Les signaux obtenus sont formés des échantillons produits par le phénomène physique observé enregistré par le réseau. La figure3.1présente un front d’onde arrivant sur un réseau linéaire
axe du réseau d #4 #2 #3 #1 ∆r4 Front d’onde ∆r3 θ . . . ∆r2
Figure 3.1: Front d’onde capté par un réseau linéaire uniforme
uniforme, dont d est la distance entre les capteurs. Selon la géométrie choisie, le premier capteur, soit le capteur #1, sert de référence au reste du réseau. En fonction de l’angle θ de la source, les autres éléments du réseau peuvent capter le front d’onde en avance ou en retard par rapport à la référence. Ceci est causé par une différence des longueurs des trajets, notées ∆rn. Cette différence de longueur cause, par exemple, un retard entre les échantillons
équivalents ou une différence de phase dans le cas d’un signal à bande étroite.
Une simplification possible est de considérer que la différence des parcours n’affecte pas les amplitudes des signaux, qui sont similaires pour chacun des capteurs. Seules les variations de phase sont considérées, dans le cas où le signal est à bande étroite ou monochromatique. Il est alors possible de créer, pour chaque source, un vecteur directionnel a de la forme suivante
a = h1 e−jφ2 e−jφ3 . . . e−jφNi> (3.3)
φn = β∆rn (3.4)
dans lequel β est la constante de phase et correspond, avec la longueur d’onde λ en mètre, à
β = 2π
λ =
2πf
vp
. (3.5)
Pour M sources situées à différents endroits, soit aux M angles θm, il existe alors autant de
vecteurs directionnels am différents. Chacune de ces sources possède une enveloppe complexe
sm(tk) à l’instant tk. Ainsi, une épreuve enregistrée, correspondant à l’équation (3.1), peut
s’exprimer comme xk= M X m=1 sm(tk)am(θm) + n(tk) . (3.6)
Le terme n(tk) désigne le bruit qui en général est du bruit additif gaussien.
Comme présentés à l’équation (3.2), les signaux peuvent aussi être représentés sous forme ma-tricielle afin de représenter l’ensemble des K échantillons reçus. Tous les vecteurs directionnels
sont d’abord exprimés par la matrice suivante : A
(N ×M )= [a1 a2 . . . aM] . (3.7) Les enveloppes complexes des sources à un instant d’échantillonnage tk sont représentées par
un vecteur sk. Pour tous les échantillons, ces K vecteurs forment la matrice S. De la même
manière, le bruit est exprimé lui aussi par une matrice, comme présenté dans les équations suivantes. sk (M ×1) = [s 1(tk) s2(tk) . . . sM(tk)]> (3.8) nk (N ×1) = [n1(tk) n2(tk) . . . nN(tk)] > (3.9) S (M ×K) = [s1 s2 . . . sK] (3.10) N (N ×K) = [n1 n2 . . . nK] (3.11)
L’équation (3.1) est réécrite de manière plus compacte en exploitant la matrice des vecteurs directionnels de l’équation (3.7), ce qui permet d’écrire
xk = Ask+ nk . (3.12)
En exploitant aussi les équations (3.10) et (3.11), on obtient la forme matricielle et la matrice des signaux reçus s’exprime simplement par :
X = AS + N . (3.13)
La matrice de covariance des signaux reçus, à moyennes nulles, s’exprime ainsi par Rxx (N ×N ) = E n xkx†k o (3.14) = A En sks † k o | {z } Rss A†+ Ennkn † k o | {z } Rnn (3.15) = ARssA† | {z } Rxx− +Rnn (3.16)
où l’opérateur E {} est l’espérance mathématique, Rssest la matrice de covariance des sources,
Rnn est la matrice de covariance du bruit et Rxx− est la matrice de covariance des signaux
reçus sans bruit additif. Une approximation de la matrice de covariance avec les K échantillons, devenant de plus en plus exacte lorsque le nombre d’échantillons K augmente, s’obtient par :
Rxx ≈ ˜Rxx= 1
KXX
†. (3.17)
La formation des signaux présentée ci-dessus correspond au cas à bande étroite où seule la phase des signaux est considérée. Ceci exige d’avoir des signaux complexes comme échantillons.
Comme il a été mentionné précédemment, ceux-ci sont obtenus par une démodulation en phase et en quadrature. Si cette démodulation est réalisée après l’échantillonnage, les échantillons fournis directement à la sortie du réseau de capteurs correspondent à l’amplitude des signaux sur chaque capteur à l’instant tk. La différence de parcours du front d’onde ∆rn entre le
capteur n et celui de référence (voir figure 3.1) provoque un délai entre les échantillons du réseau pour le même front d’onde, c’est-à-dire que les temps d’échantillonnages tk diffèrent
pour les échantillons du même front d’onde. Ainsi, au lieu de mesurer une différence de phase entre les signaux de chaque capteur, il s’agit d’un délai temporel entre les échantillons fournis par chacun d’entre eux.
3.2
Modèle de propagation
La propagation décrit ce qui se produit entre une source et le point d’observation. Une source émet une onde qui se déplace, donc se propage, vers un endroit où se fait son observation. Le front d’onde produit est sphérique, centré sur la source, et il le demeure si le milieu de propagation est homogène. Plusieurs types de sources produisent plusieurs types d’ondes. Par exemple, il peut s’agir d’ondes électromagnétiques ou d’ondes mécaniques, comme le son. L’onde électromagnétique ne nécessite pas de support physique pour la propagation, alors que l’acoustique, comme toute onde mécanique, en nécessite un. Cependant, peu importe leur type, les mêmes principes de propagation s’appliquent.
3.2.1 Propagation audio dans l’air
Une onde particulière est l’onde acoustique se propageant dans l’air. Le milieu de propagation est alors constitué de gaz et il s’agit d’une onde de pression. En effet, ce sont les variations de la pression locale qui forment l’onde acoustique et qui permettent sa propagation. Ainsi, comme le champ électrique ou magnétique forme celle de type électromagnétique, la pression constitue l’onde acoustique dans l’air. Le niveau de pression acoustique est proportionnel à
1
r, où r est la distance par rapport à la source.
Une caractéristique importante de l’onde, définie à l’équation (3.5), est la constante de phase β. Celle-ci est directement reliée à la longueur d’onde λ. En effet, une longueur d’onde correspond exactement à un déphasage de 2π radians. On obtient alors l’équation (3.5). À partir de cette équation, la longueur d’onde est reliée à la fréquence et à la vitesse de propagation vp par
l’équation
λ= vp
f (3.18)
où la vitesse vpest en m/s et la fréquence, en Hz. La vitesse de propagation dans l’air s’exprime
comme
vp ≈20,05
√
où T est la température de l’air en Kelvin. D’autres facteurs, comme la pression atmosphérique et le taux d’humidité relative, influencent aussi la vitesse du son dans l’air. Par contre, tous les autres facteurs influencent peu vp, surtout pour des mesures au niveau du sol, près de la
pression atmosphérique normale [1]. À une température de 20℃, la vitesse de propagation obtenue est vp ≈343,3 m/s.
À partir de la source et en s’éloignant de celle-ci, l’onde crée différentes zones, soit, dans l’ordre, le champ proche, le champ libre et le champ réverbérant, les deux derniers formant le champ lointain. Le champ proche est situé aux alentours de la source et contient entre autres l’onde et plusieurs réflexions. Le champ libre est présent lorsque l’amplitude de l’onde (pression) diminue en 1
r, soit une propagation normale où se font les mesures. Le champ réverbérant
n’est pas toujours présent et existe après le champ libre, lorsque l’onde est réfléchie, par exemple à l’extrémité d’une pièce à l’intérieur.
Divers facteurs influencent la propagation. D’abord, la distance influence l’amplitude de l’onde. En effet, comme le front d’onde est sphérique, il y a des pertes par dispersion et l’amplitude diminue en 1
r. Celle-ci est aussi réduite à cause des pertes dans le milieu de
pro-pagation. Il peut y avoir une absorption de l’énergie par le milieu, ce qui réduit l’amplitude de l’onde proportionnellement à e−αr, où α est la constante d’atténuation. Les unités de α sont des Népers par mètre (Np/m). Il est possible de former l’expression α + jβ représentant la constante de propagation. Dans le modèle présenté en (3.3), l’atténuation n’est pas considérée parce que la différence d’atténuation entre les capteurs est en général négligeable pour les cas pratiques explorés. Enfin, dans la zone lointaine, il peut y avoir des obstacles dans le chemin de propagation causant de la diffraction et des réflexions, influençant l’onde ainsi captée. Si le milieu est homogène et qu’il n’y a pas de différences de pression ou de densité locales, tous les facteurs s’appliquent de manière uniforme dans tout le milieu.
3.2.2 Types de fronts d’onde
Deux types de fronts d’onde existent, soit le front d’onde plan et le front d’onde courbe. Comme mentionné précédemment, le front d’onde produit par une source est sphérique. Par contre, plus la distance par rapport à la source augmente, plus le rayon de cette sphère aug-mente. Ainsi, lorsque le front d’onde est observé, par un réseau linéaire uniforme par exemple, celui-ci peut paraître localement plan et le front est donc assimilable à un front d’onde plan. Pour obtenir un front d’onde plan, l’observation doit être suffisamment éloignée de la source et les dimensions sur lesquelles le front d’onde est observé doivent être suffisamment petites pour que les points se trouvant sur un même front d’onde soient tous situés dans un même plan.
Dans le cas d’un front d’onde plan observé par un réseau linéaire uniforme, l’équation (3.4) se simplifie. Le déphasage sur chaque capteur augmente toujours du même facteur parce que
Front d’onde source r ds1 ∆rN axe du réseau d1 #1 #N d2 dN θ dsN centre
Figure 3.2: Front d’onde courbe sur un réseau linéaire
la différence de parcours entre les capteurs est exprimée par ∆rn= (n − 1)d cos θ. On obtient
alors :
φn= (n − 1)βd cos θ = (n − 1)φ (3.20)
où φ = βd cos θ. En utilisant l’équation (3.20), le vecteur directionnel de l’équation (3.3), pour le cas du front plan, s’exprime différemment pour obtenir :
a(θ) =h1 e−jφ e−j2φ . . . e−j(N −1)φi> . (3.21)
L’autre type de front d’onde est le front d’onde courbe. Toutes les sources produisent un front d’onde sphérique. Si l’observation par un réseau linéaire est suffisamment rapprochée de la source, le front paraîtra courbe. En effet, tous les points d’un même front d’onde sont situés à une distance égale de la source et donc à une distance variable non négligeable par rapport au réseau. La différence de parcours entre la source et les différents capteurs est donc fonction de l’angle et de la distance par rapport à la source.
La figure3.2présente un front courbe capté par un réseau linéaire. Sur cette figure, la distance de la source par rapport au réseau r est mesurée au centre de celui-ci. Les dsn représentent
la distance entre la source et le capteur n, tandis que les dn représentent la distance entre
le centre du réseau et le capteur n. Pour un réseau linéaire uniforme, les dn varient selon les